
Sliding-Window TD-FrFT Algorithm for High-Precision Ranging of LFM Signals in the Presence of Impulse Noise


Abstract
:1. Introduction
2. Ranging Principle of LFM Signals Based on FrFT
3. LFM Signal Ranging under Impulse Noise
3.1. TD Filtering Algorithm
3.2. Sliding-Window TD Filtering Algorithm
3.3. FrFT Ranging Algorithm
4. Simulation-Based Experiments and Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Talebi, S.P.; Mandic, D.P. Distributed particle filtering of α-stable signals. IEEE Signal Process. Lett. 2017, 24, 1862–1866. [Google Scholar] [CrossRef]
- Royuela-del-Val, J.; Simmross-Wattenberg, F.; Alberola-López, C. Libstable: Fast, Parallel, and High-Precision Computation of α-Stable Distributions in R, C/C++, and MATLAB. J. Stat. Soft. 2017, 78, 1–25. [Google Scholar] [CrossRef]
- Borijindargoon, N.; Ng, B.P. Directional Adaptive MUSIC-Like Algorithm Under Symmetric α-Stable Distributed Noise. Prog. Electromagn. Res. Lett. 2019, 87, 29–37. [Google Scholar] [CrossRef]
- Castillo-Barnes, D.; Martinez-Murcia, F.J.; Ramírez, J.; Górriz, J.M.; Salas-Gonzalez, D. Expectation–Maximization algorithm for finite mixture of α-stable distributions. Neurocomputing 2020, 413, 210–216. [Google Scholar] [CrossRef]
- Piotr, K.; Radosław, Z.; Jerome, A.; Agnieszka, W. Generalized spectral coherence for cyclostationary signals with α-stable distribution. Mech. Syst. Signal Process. 2021, 159, 107737. [Google Scholar]
- Pelekanakis, K.; Chitre, M. Adaptive Sparse Channel Estimation under Symmetric alpha-Stable Noise. IEEE Trans. Wirel. Commun. 2014, 13, 3183–3195. [Google Scholar] [CrossRef]
- Chavali, V.G.; Silva, C.R.C.M.D. Detection of Digital Amplitude—Phase Modulated Signals in Symmetric Alpha-Stable Noise. IEEE Trans. Commun. 2012, 60, 3365–3375. [Google Scholar] [CrossRef]
- Feng, P.; Zhang, L.; Meng, D.; Pi, X. An active noise control algorithm based on fractional lower order covariance with on-line characteristics estimation. Mech. Syst. Signal Process. 2023, 186, 109835. [Google Scholar] [CrossRef]
- Tao, Y.; Juanatas, R.; Caballero, J.M. Research on a new constant modulus blind equalization algorithm in the mine industrial network. In Proceedings of the 2022 14th International Conference on Communication Software and Networks (ICCSN), Chongqing, China, 10–12 June 2022; pp. 157–160. [Google Scholar] [CrossRef]
- Xu, Q.; Cha, D. Research on Signal Processing of Median Filter Method in Vibration Measure for Alpha Stable Distribution Noise. Coal Mine Machinery. 2009, 30, 42–45. [Google Scholar]
- Ramirez, J.M.; Paredes, J.L. Recursive weighted myriad based filters and their optimizations. IEEE Trans. Signal Process. 2016, 64, 4027–4039. [Google Scholar] [CrossRef]
- Zorlu, H. Optimization of weighted myriad filters with differential evolution algorithm. AEU-Int. J. Electron. Commun. 2017, 77, 1–9. [Google Scholar] [CrossRef]
- Liao, X.; Lei, Y.; Luo, L.; Huang, J. An MQAM signal number element rate estimation method based on RHMy filtering under alpha-stable distribution. Signal Process. 2018, 34, 592–601. [Google Scholar]
- Kurkin, D.; Roenko, A.; Lukin, V.; Djurovič, I. An adaptive meridian estimator. In Proceedings of the 2011 Microwaves, Radar and Remote Sensing Symposium, Kiev, Ukraine, 25–27 August 2011; pp. 301–304. [Google Scholar] [CrossRef]
- Pander, T.; Przybyła, T. Impulsive noise cancelation with simplified Cauchy-based p-norm filter. Signal Process. 2012, 92, 2187–2198. [Google Scholar] [CrossRef]
- Jin, Y.; Hu, B.X.; Ji, H.B. A unified framework for robust weighted filtering under α-stable distributed noise. Syst. Eng. Electron. Technol. 2016, 38, 2221–2227. [Google Scholar]
- Jin, Y.; Duan, P.T.; Ji, H.B. Parameter Estimation of LFM Signals Based on LVD in Complicated Noise Environments. J. Electron. Inf. 2014, 36, 1106–1112. [Google Scholar]
- Zhu, X.; Xu, S.; Zhang, Z.; Xu, X.; Zhang, X. Signal processing algorithm for multi-target underwater positioning system. Foreign Electron. Meas. Technol. 2020, 39, 19–24. [Google Scholar]
- Zhao, Z.K.; Gong, H.; Zhang, R. A method for radiation source signal detection based on sequential statistical filtering and binary accumulation. Syst. Eng. Electron. Technol. 2022, 44, 1085–1092. [Google Scholar]
- Duan, H.; Cheng, Y.; Shen, B.; Bai, G. LFM interference cancellation algorithm based on MDPT-WC for mark XIIA mode 5. In Proceedings of the 2020 IEEE 20th International Conference on Communication Technology (ICCT), Nanning, China, 28–31 October 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 246–252. [Google Scholar]
- Shangguan, J.X.; Zhang, S.Q.; Zheng, L.J.; Jiang, A.Q.; Ai, H.K.; Zhang, L.G.; Liu, H.T. Signal denoiseing method based on regularized chirp mode pursuit algorithm and its applications. Acta Metrol. Sin. 2022, 43, 798–804. [Google Scholar]
- Zhang, X. Modern Signal Processing; Tsinghua University Press: Beijing, China, 1995. [Google Scholar]
- Tao, R.; Li, X.M.; Li, Y.L.; Wang, Y. Time-delay estimation of chirp signals in the fractional Fourier domain. IEEE Trans. Signal Process. 2009, 57, 2852–2855. [Google Scholar]
- Li, X.; Li, L.; Jiang, Y. DFrFT-based pulse pressure method and performance comparison with matched filtering. Comput. Eng. Appl. 2012, 48, 16–21. [Google Scholar]
- Yang, C.; Yu, Y.; Wu, C.; Ning, G. A fast time-delay estimator for linear frequency modulation signal based on FrFT. In Proceedings of the 2019 IEEE 3rd Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chengdu, China, 15–17 March 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 2278–2281. [Google Scholar]
- Chen, M.; Hsing, H.Y.; Wang, H.F. Multipath time delay estimation of LFM signals based on NAT function under impulse noise. J. Electron. Meas. Instrum. 2022, 36, 73–81. [Google Scholar]
- Zhao, T.; Chi, Y. Quantum Weighted Fractional-Order Transform. Fractal Fract. 2023, 7, 269. [Google Scholar] [CrossRef]
- Zhao, T.; Chi, Y. Multiweighted-Type Fractional Fourier Transform: Unitarity. Fractal Fract. 2021, 5, 205. [Google Scholar] [CrossRef]
- Wang, Z.; Long, Z.; Xie, Y.; Ding, J.; Luo, J.; Li, X. A Discrete Nonlinear Tracking-Differentiator and Its Application in Vibration Suppression of Maglev System. Math. Probl. Eng. 2020, 2020, 1849816. [Google Scholar] [CrossRef]
- Liu, Z.J.; Liu, S.T. Random fractional Fourier transform. Opt. Lett. 2007, 32, 2088–2090. [Google Scholar] [CrossRef]
- Liu, X.L.; Li, X.; Xiao, B.; Wang, C.Y.; Ma, B. LFM Signal Parameter Estimation via FTD-FRFT in Impulse Noise. Fractal Fract. 2023, 7, 69. [Google Scholar] [CrossRef]
- Zhang, K.; Jiang, H.X.; Wang, J.Y. A filtering method for telemetry data based on sliding maximum velocity tracking differentiator. J. Northwestern Polytech. Univ. 2020, 38, 515–522. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Name | Value | Remarks |
|---|---|---|---|
| Signal parameters | A (Amplitude) | 1 mV | These parameters are arbitrarily set and can be changed according to the practical application. |
| f0 (Initial frequency) | 10 Hz | ||
| T (Time width of the signal) | 20 μs | ||
| B (Bandwidth) | 40 MHz | ||
| N (Number of sampling points) | 4096 | ||
| Noise parameters | GSNR | 1 dB | In this noise condition, the performance of the three algorithms considerably differ. |
| a (Location parameter) | 0 | ||
| α (Characteristic parameter) | 1.5 | ||
| β (Symmetry parameter) | 0 | ||
| Algorithm parameters | r (Tracking factor) | 10,000 | This condition corresponds to the optimal TD performance. |
| h (Step size) | 0.01 | ||
| Sliding-window width | 50 |
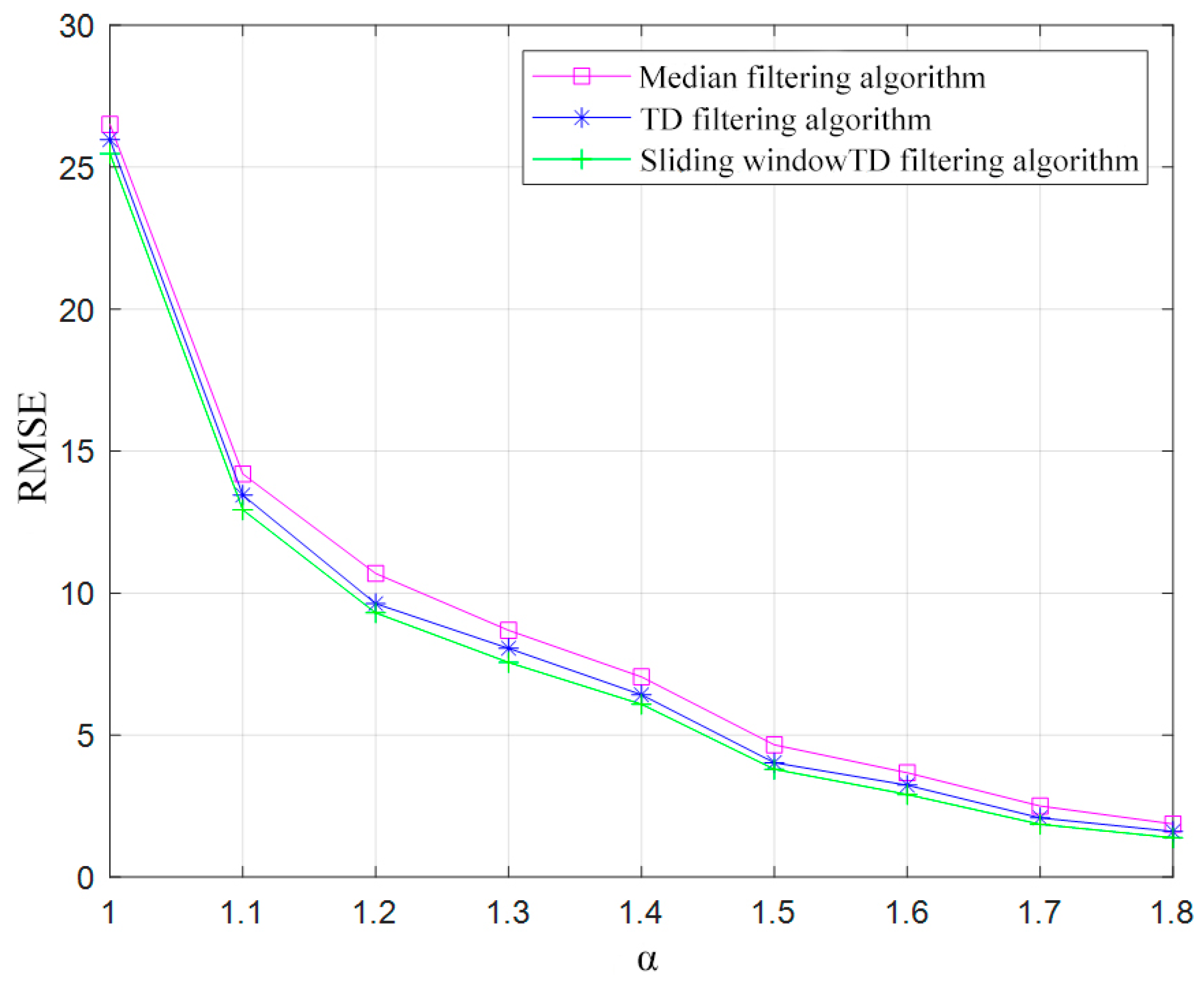
| Category | Name | Value | Remarks |
|---|---|---|---|
| Signal parameters | A (Amplitude) | 1 mV | These parameters are the same as those in Experiment 1. |
| f0 (Initial frequency) | 10 Hz | ||
| T (Time width of the signal) | 20 μs | ||
| B (Bandwidth) | 40 MHz | ||
| N (Number of sampling points) | 4096 | ||
| Noise parameters | GSNR | 1 dB | In this noise condition, the performance of three algorithms is analyzed with the α changed. |
| a (Location parameter) | 0 | ||
| α (Characteristic parameter) | 1.0, 1.1, 1.2, 1.3, 1.4, 1.5, 1.6, 1.7, 1.8 | ||
| β (Symmetry parameter) | 0 | ||
| Algorithm parameters | r (Tracking factor) | 10,000 | These parameters are the same as those in Experiment 1. |
| h (Step size) | 0.01 | ||
| Sliding-window width | 50 |
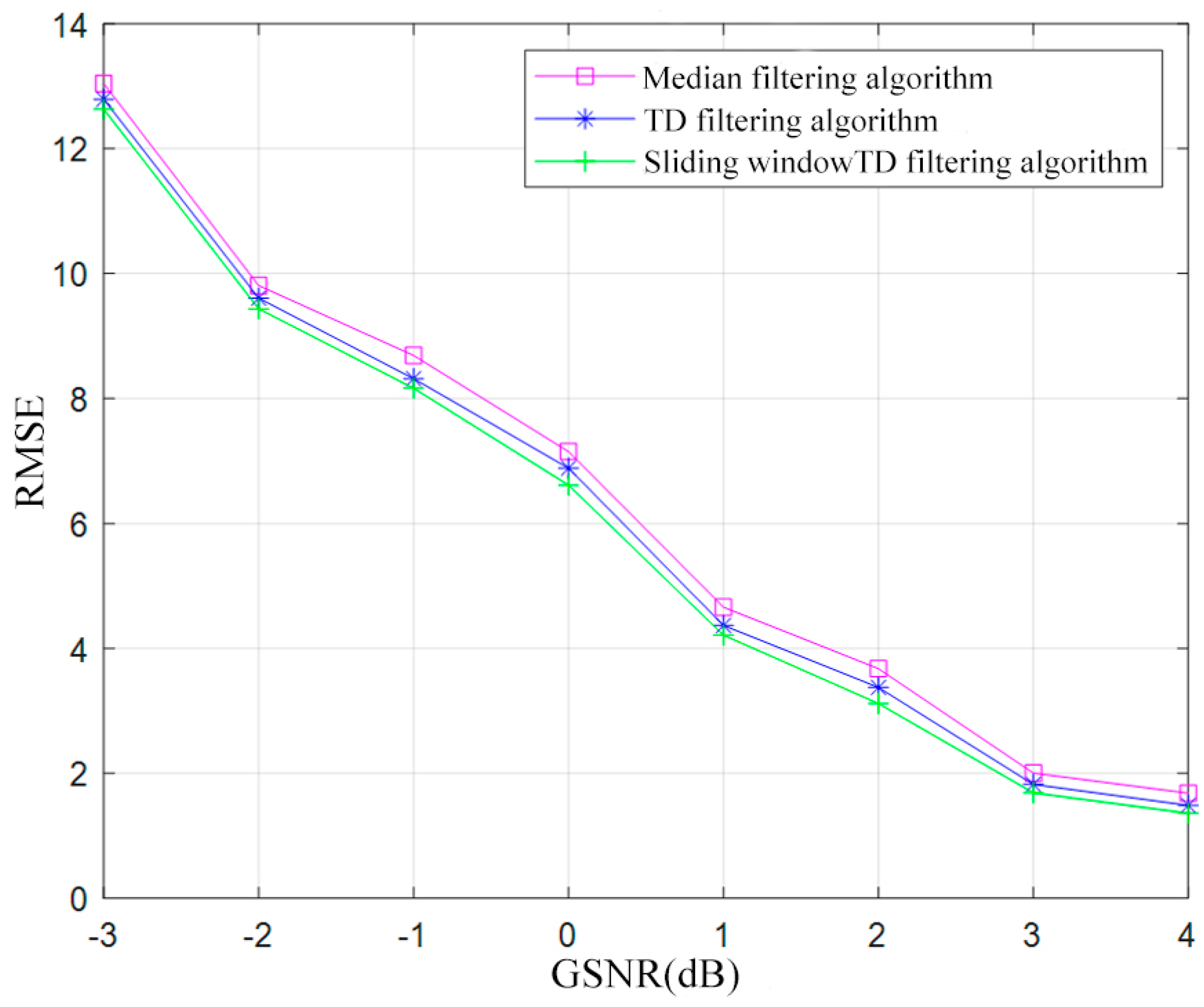
| Category | Name | Value | Remarks |
|---|---|---|---|
| Signal parameters | A (Amplitude) | 1 mV | These parameters are the same as those in Experiment 1. |
| f0 (Initial frequency) | 10 Hz | ||
| T (Time width of the signal) | 20 μs | ||
| B (Bandwidth) | 40 MHz | ||
| N (Number of sampling points) | 4096 | ||
| Noise parameters | GSNR | −3, −2, −1, 0, 1, 2, 3, 4 (dB) | In this noise condition, the performance of three algorithms is analyzed with the GSNR changed. |
| a (Location parameter) | 0 | ||
| α (Characteristic parameter) | 1.5 | ||
| β (Symmetry parameter) | 0 | ||
| Algorithm parameters | r (Tracking factor) | 10,000 | These parameters are the same as those in Experiment 1. |
| h (Step size) | 0.01 | ||
| Sliding-window width | 50 |
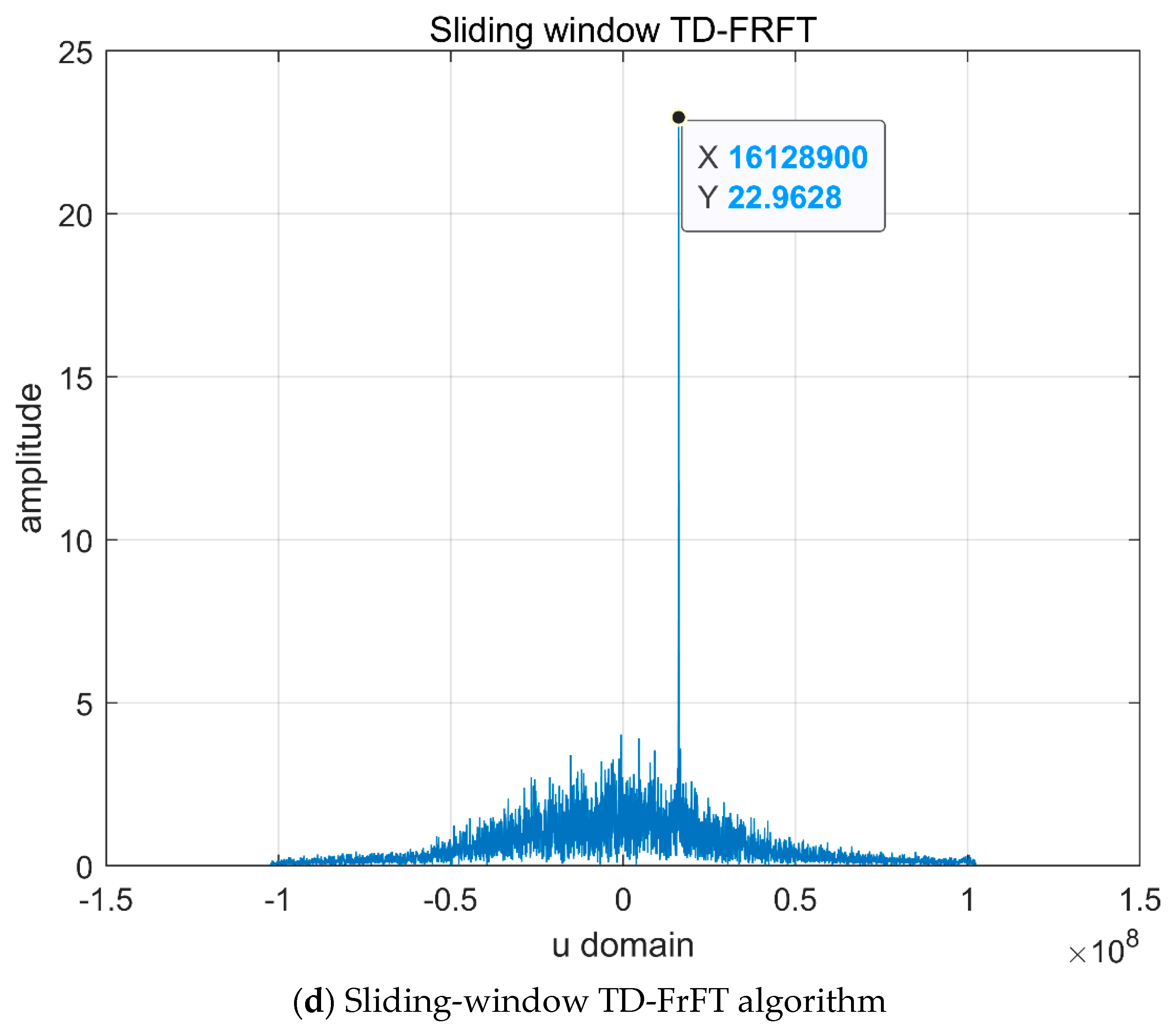
| Category | Name | Value | Remarks |
|---|---|---|---|
| Signal parameters | A (Amplitude) | 1 mV | All the parameters are the same as those in Experiment 1. |
| f0 (Initial frequency) | 10 Hz | ||
| T (Time width of the signal) | 20 μs | ||
| B (Bandwidth) | 40 MHz | ||
| N (Number of sampling points) | 4096 | ||
| Noise parameters | GSNR | 1 dB | |
| a (Location parameter) | 0 | ||
| α (Characteristic parameter) | 1.5 | ||
| β (Symmetry parameter) | 0 | ||
| Algorithm parameters | r (Tracking factor) | 10,000 | |
| h (Step size) | 0.01 | ||
| Sliding-window width | 50 |
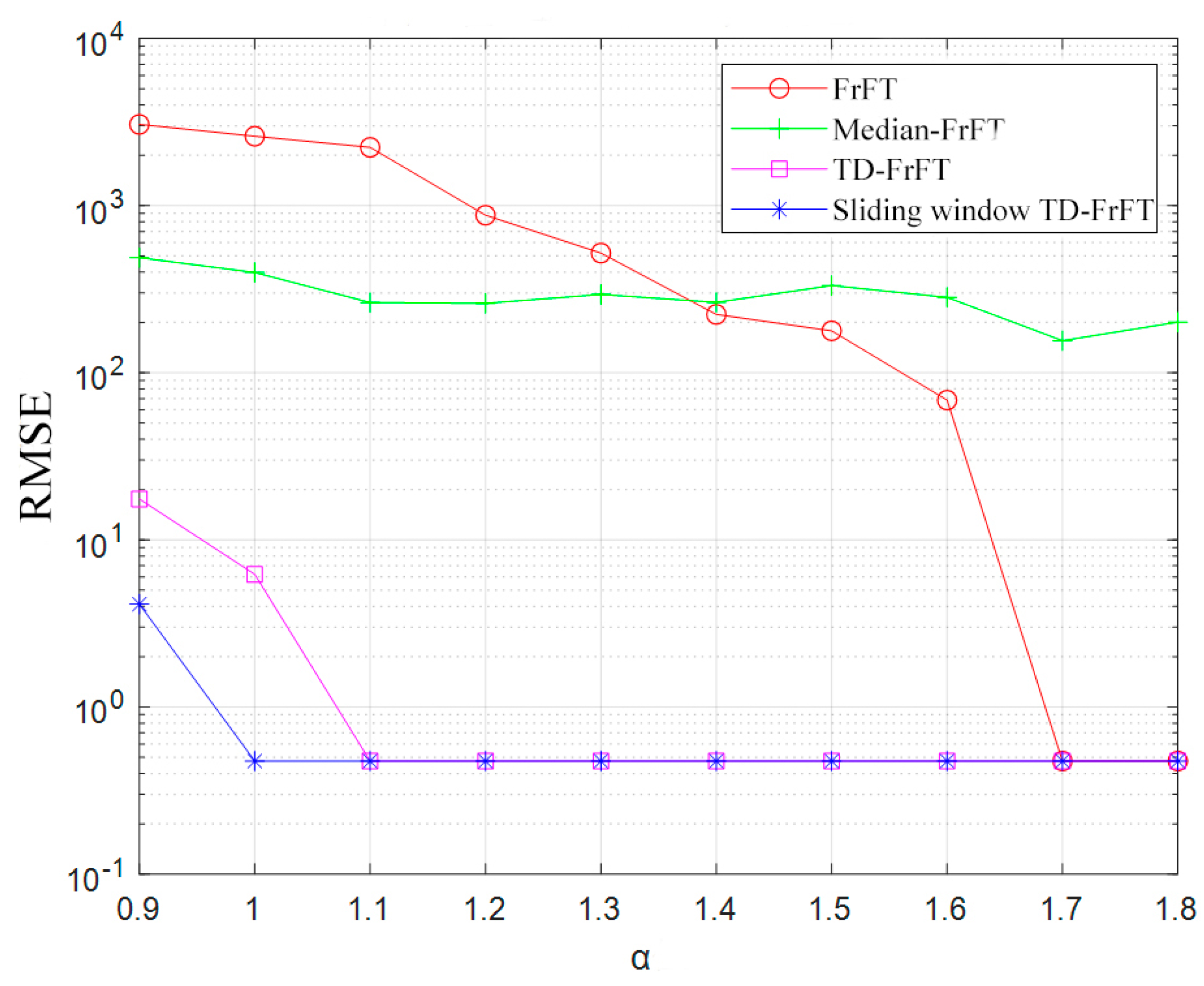
| Category | Name | Value | Remarks |
|---|---|---|---|
| Signal parameters | A (Amplitude) | 1 mV | These parameters are the same as those in Experiment 1. |
| f0 (Initial frequency) | 10 Hz | ||
| T (Time width of the signal) | 20 μs | ||
| B (Bandwidth) | 40 MHz | ||
| N (Number of sampling points) | 4096 | ||
| Noise parameters | GSNR | 1 dB | In this noise condition, the ranging accuracy of three algorithms is analyzed with the α changed. |
| a (Location parameter) | 0 | ||
| α (Characteristic parameter) | 1.8, 1.7, 1.6, 1.5, 1.4, 1.3, 1.2, 1.1, 1.0, 0.9 | ||
| β (Symmetry parameter) | 0 | ||
| Algorithm parameters | r (Tracking factor) | 10,000 | These parameters are the same as those in Experiment 1. |
| h (Step size) | 0.01 | ||
| Sliding-window width | 50 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiao, B.; Liu, X.; Wang, C.; Wang, Y.; Huang, T. Sliding-Window TD-FrFT Algorithm for High-Precision Ranging of LFM Signals in the Presence of Impulse Noise. Fractal Fract. 2023, 7, 679. https://doi.org/10.3390/fractalfract7090679
Xiao B, Liu X, Wang C, Wang Y, Huang T. Sliding-Window TD-FrFT Algorithm for High-Precision Ranging of LFM Signals in the Presence of Impulse Noise. Fractal and Fractional. 2023; 7(9):679. https://doi.org/10.3390/fractalfract7090679
Chicago/Turabian StyleXiao, Bo, Xuelian Liu, Chunyang Wang, Yuchao Wang, and Tingsheng Huang. 2023. "Sliding-Window TD-FrFT Algorithm for High-Precision Ranging of LFM Signals in the Presence of Impulse Noise" Fractal and Fractional 7, no. 9: 679. https://doi.org/10.3390/fractalfract7090679
APA StyleXiao, B., Liu, X., Wang, C., Wang, Y., & Huang, T. (2023). Sliding-Window TD-FrFT Algorithm for High-Precision Ranging of LFM Signals in the Presence of Impulse Noise. Fractal and Fractional, 7(9), 679. https://doi.org/10.3390/fractalfract7090679