


Bifurcation and Stability of Two-Dimensional Activator–Inhibitor Model with Fractional-Order Derivative



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Discretization Process
3. Stability Analysis
- If and , then and , which implies that both eigenvalues have magnitudes less than 1.
- If , then and (or and ), which implies that one eigenvalue has a magnitude less than 1, while the other has a magnitude greater than 1.
- If and , then and , which implies that both eigenvalues have magnitudes greater than 1.
- If and , then μ and are complex numbers, and , which implies that both eigenvalues are on the unit circle.
- and if and only if and
- If one set of the following conditions is true, then is locally asymptotically stable (sink):
- i-
- and .
- ii-
- and .
- If one set of the following conditions is true, then is unstable (source):
- i-
- and .
- ii-
- and .
- The fixed point is unstable (saddle) if
- The point is non-hyperbolic and the roots of Equation (8) are and if
- The point is non-hyperbolic and the roots of Equation (8) are complex numbers with modulus one if
4. Bifurcation Analysis
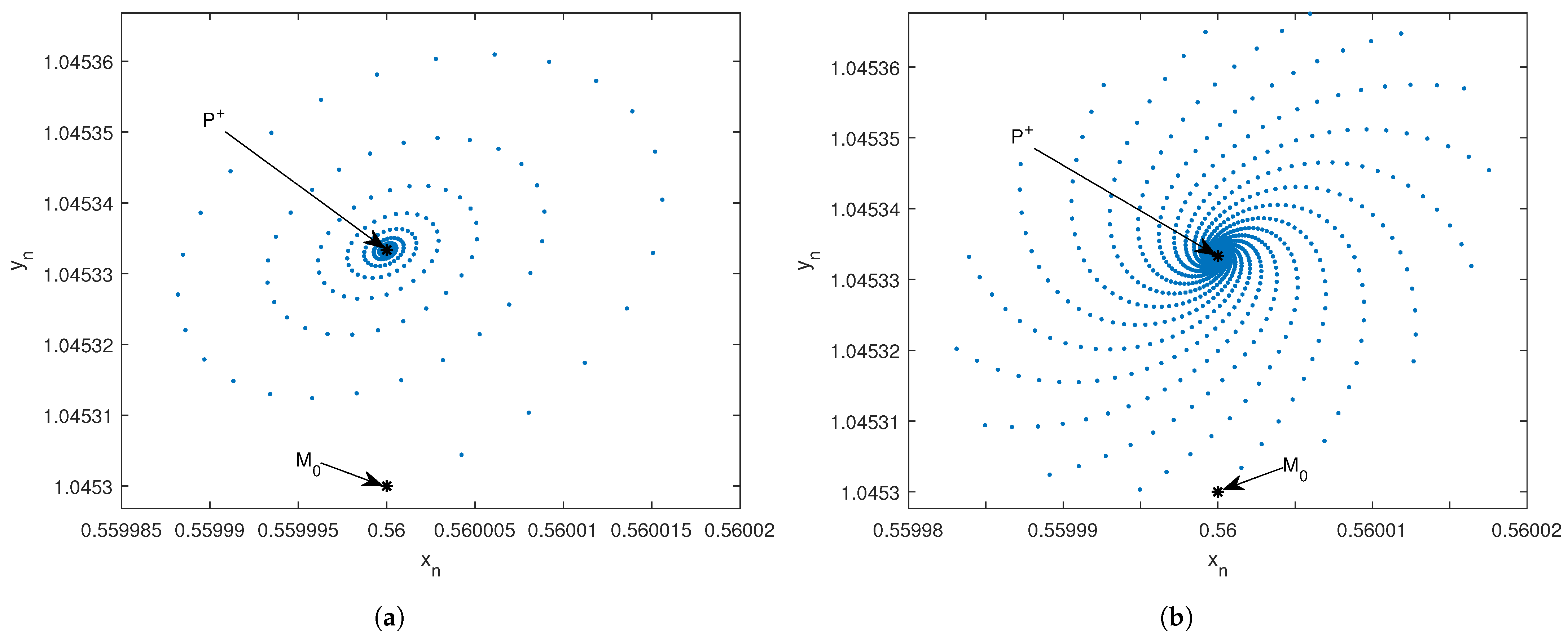
4.1. Neimark–Sacker Bifurcation
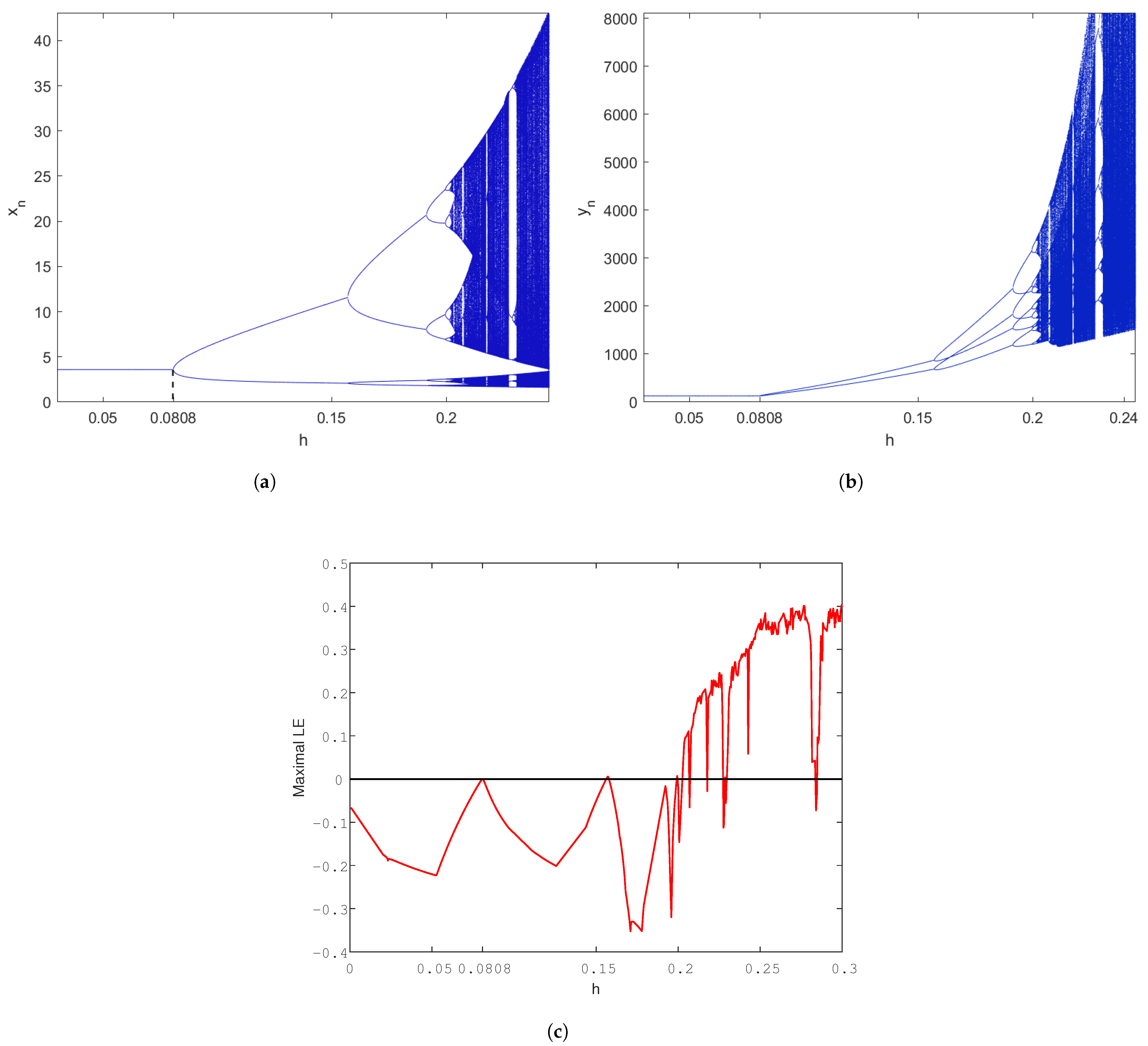
4.2. Period-Doubling Bifurcation
5. Numerical Computations and Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Patadiya, N.; Panchal, N.; Vaghela, V. A review on enzyme inhibitors. Int. Res. J. Pharm. 2021, 12, 60–66. [Google Scholar] [CrossRef]
- Mohan, C.; Long, K.; Mutneja, M. An Introduction to Inhibitors and Their Biological Applications, 1st ed.; EMD Millipore Corporation: Burlington, MA, USA, 2013. [Google Scholar]
- Gierer, A.; Meinhardt, H. A theory of biological pattern formation. Kybernetik 1972, 12, 30–39. [Google Scholar] [CrossRef] [PubMed]
- Khan, A.Q.; Saleem, Z.; Ibrahim, T.F.; Osman, K.; Alshehri, F.M.; El-Moneam, M.A. Bifurcation and chaos in a discrete activator-inhibitor system. AIMS Math. 2022, 8, 4551–4574. [Google Scholar] [CrossRef]
- Pasemann, G.; Flemming, S.; Alonso, S.; Beta, C.; Stannat, W. Diffusivity Estimation for Activator-Inhibitor Models: Theory and Application to Intracellular Dynamics of the Actin Cytoskeleton. J. Nonlinear Sci. 2020, 31, 59. [Google Scholar] [CrossRef]
- Guo, L.; Shi, X.; Cao, J. Turing patterns of Gierer-Meinhardt model on complex networks. Nonlinear Dyn. 2021, 105, 899–909. [Google Scholar] [CrossRef]
- Song, Y.; Yang, R.; Sun, G. Pattern dynamics in a Gierer-Meinhardt model with a saturating term. Appl. Math. Model. 2017, 46, 476–491. [Google Scholar] [CrossRef]
- Chen, S.; Shi, J.; Chen, G.Z. Spatial pattern formation in activator-inhibitor models with nonlocal dispersal. Discrete Contin. Dyn. Syst. Ser. B 2021, 26, 1843–1866. [Google Scholar] [CrossRef]
- Chen, S. Some properties for the solutions of a generalized Activator-Inhibitor model. Commun. Pure Appl. Anal. 2006, 5, 919–928. [Google Scholar] [CrossRef]
- Ni, W.M.; Takagi, I.; Yanagida, E. Stability of least energy patterns of the shadow system for an activator-inhibitor model. Jpn. J. Indust. Appl. Math. 2001, 18, 259–272. [Google Scholar] [CrossRef]
- Khan, A.Q.; Almatrafi, M.B. Two-dimensional discrete-time laser model with chaos and bifurcations. AIMS Math. 2023, 8, 6804–6828. [Google Scholar] [CrossRef]
- Khan, A.Q.; Bukhari, S.A.H.; Almatrafi, M.B. Global dynamics, Neimark-Sacker bifurcation and hybrid control in a Leslie’s prey-predator model. Alex. Eng. J. 2022, 61, 11391–11404. [Google Scholar] [CrossRef]
- Ross, R. The development of fractional calculus. Hist. Math. 1977, 4, 75–89. [Google Scholar] [CrossRef]
- Miller, K.S.; Ross, B. An Introduction to the Fractional Calculus and Fractional Differential Equations; John Wiley & Sons: New York, NY, USA, 1993. [Google Scholar]
- Riemann, B. Versuch Einer Allgemeinen Auffassung der Integration und Differentiation. Gesammelte Mathematische Werke und Wissenschaftlicher Nachlass; Teubner, Leipzig: New York, NY, USA, 1953. [Google Scholar]
- Khalil, R.; Al Horani, M.; Yousef, A.; Sababheh, M. A new definition of fractional derivative. J. Comput. Appl. Math. 2014, 264, 65–70. [Google Scholar] [CrossRef]
- Abdeljawad, T. On conformable fractional calculus. J. Comput. Appl. Math. 2014, 279, 57–66. [Google Scholar] [CrossRef]
- Khalil, R. Flip and Neimark-Sacker Bifurcation in a Differential Equation With Piecewise Constant Arguments Model. J. Differ. Equ. Appl. 2017, 23, 763–778. [Google Scholar] [CrossRef]
- Yousef, F.; Semmar, B.; Al Nasr, K. Incommensurate conformable-type three-dimensional Lotka-Volterra model: Discretization, stability, and bifurcation. Arab. J. Basic Appl. Sci. 2022, 29, 113–120. [Google Scholar] [CrossRef]
- Yousef, F.; Semmar, B.; Al Nasr, K. Dynamics and simulations of discretized Caputo-conformable fractional-order Lotka-Volterra models. Nonlinear Eng. 2022, 11, 100–111. [Google Scholar] [CrossRef]
- Wiener, J. Differential Equations with Piecewise Constant Delays, Trends in Theory and Practice of Nonlinear Differential Equations: Lecture Notes in Pure and Applied Math; Dekke: New York, NY, USA, 1984. [Google Scholar]
- Berkal, M.; Navarro, J.F. Qualitative behavior of a two-dimensional discrete-time prey-predator model. Comp. Math. Methods 2021, 3, e1193. [Google Scholar] [CrossRef]
- Liu, Y.; Li, X. Dynamics of a discrete predator-prey model with Holling-II functional response. Int. J. Biomath. 2021, 14, 2150068. [Google Scholar] [CrossRef]
- Berkal, M.; Navarro, J.F. Qualitative study of a second order difference equation. Turkish J. Math. 2023, 47, 516–527. [Google Scholar] [CrossRef]
- Carr, J. Application of Center Manifold Theory; Springer: New York, NY, USA, 1981. [Google Scholar]
- Din, Q. Bifurcation analysis and chaos control in discrete-time glycolysis models. J. Math. Chem. 2018, 56, 904–931. [Google Scholar] [CrossRef]
- Din, Q. Controlling chaos in a discrete-time prey-predator model with Allee effects. Int. J. Dyn. Control 2018, 6, 858–872. [Google Scholar] [CrossRef]
- Din, Q.; Elsadany, A.A.; Ibrahim, S. Bifurcation analysis and chaos control in a second-order rational difference equation. Int. J. Nonlinear Sci. Numer. Simul. 2018, 19, 53–68. [Google Scholar] [CrossRef]
- Kuznetsov, Y.A. Elements of Applied Bifurcation Theory; Springer: New York, NY, USA, 1997. [Google Scholar]
- Wiggins, S. Dynamical Systems and Chaos; Springer Science and Business Media: Dordrecht, The Netherlands, 2003. [Google Scholar]









Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Berkal, M.; Almatrafi, M.B. Bifurcation and Stability of Two-Dimensional Activator–Inhibitor Model with Fractional-Order Derivative. Fractal Fract. 2023, 7, 344. https://doi.org/10.3390/fractalfract7050344
Berkal M, Almatrafi MB. Bifurcation and Stability of Two-Dimensional Activator–Inhibitor Model with Fractional-Order Derivative. Fractal and Fractional. 2023; 7(5):344. https://doi.org/10.3390/fractalfract7050344
Chicago/Turabian StyleBerkal, Messaoud, and Mohammed Bakheet Almatrafi. 2023. "Bifurcation and Stability of Two-Dimensional Activator–Inhibitor Model with Fractional-Order Derivative" Fractal and Fractional 7, no. 5: 344. https://doi.org/10.3390/fractalfract7050344
APA StyleBerkal, M., & Almatrafi, M. B. (2023). Bifurcation and Stability of Two-Dimensional Activator–Inhibitor Model with Fractional-Order Derivative. Fractal and Fractional, 7(5), 344. https://doi.org/10.3390/fractalfract7050344