Complex Rayleigh–van-der-Pol–Duffing Oscillators: Dynamics, Phase, Antiphase Synchronization, and Image Encryption


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
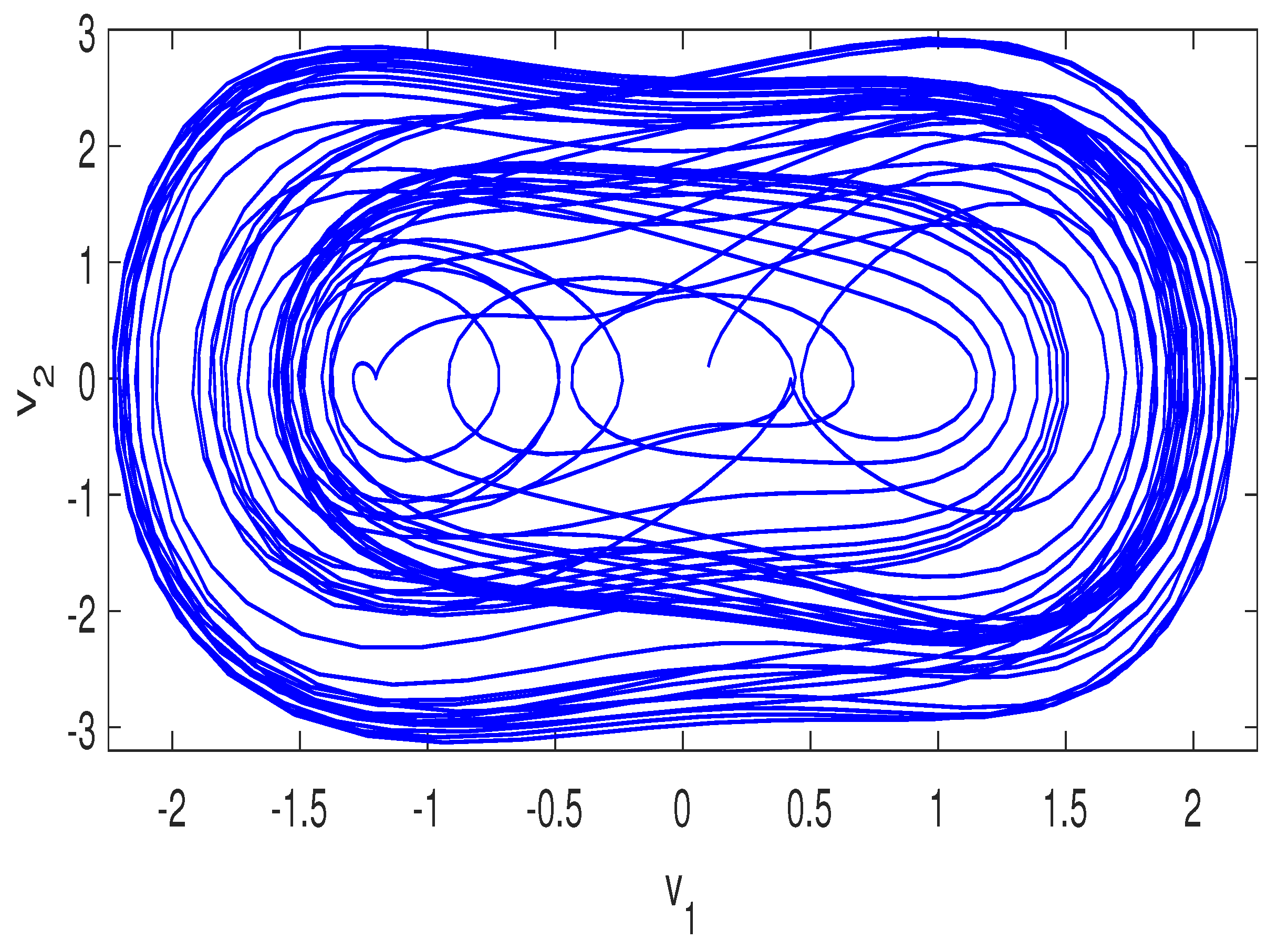
2. Dynamics of Complex RVDOs (3) and (4)
3. A Scheme for PS and APS with Different Dimensions
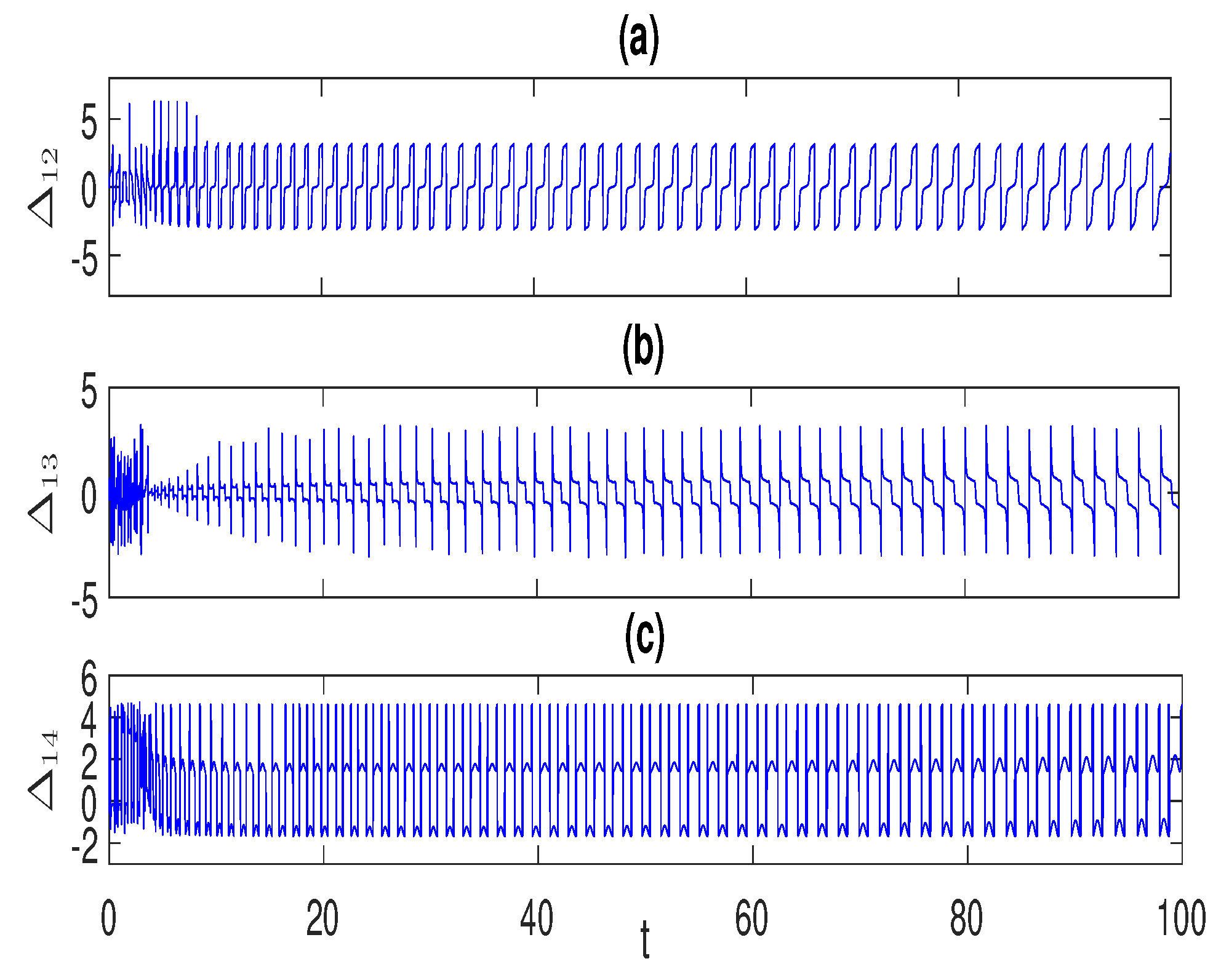
4. Illustrative Example for PS
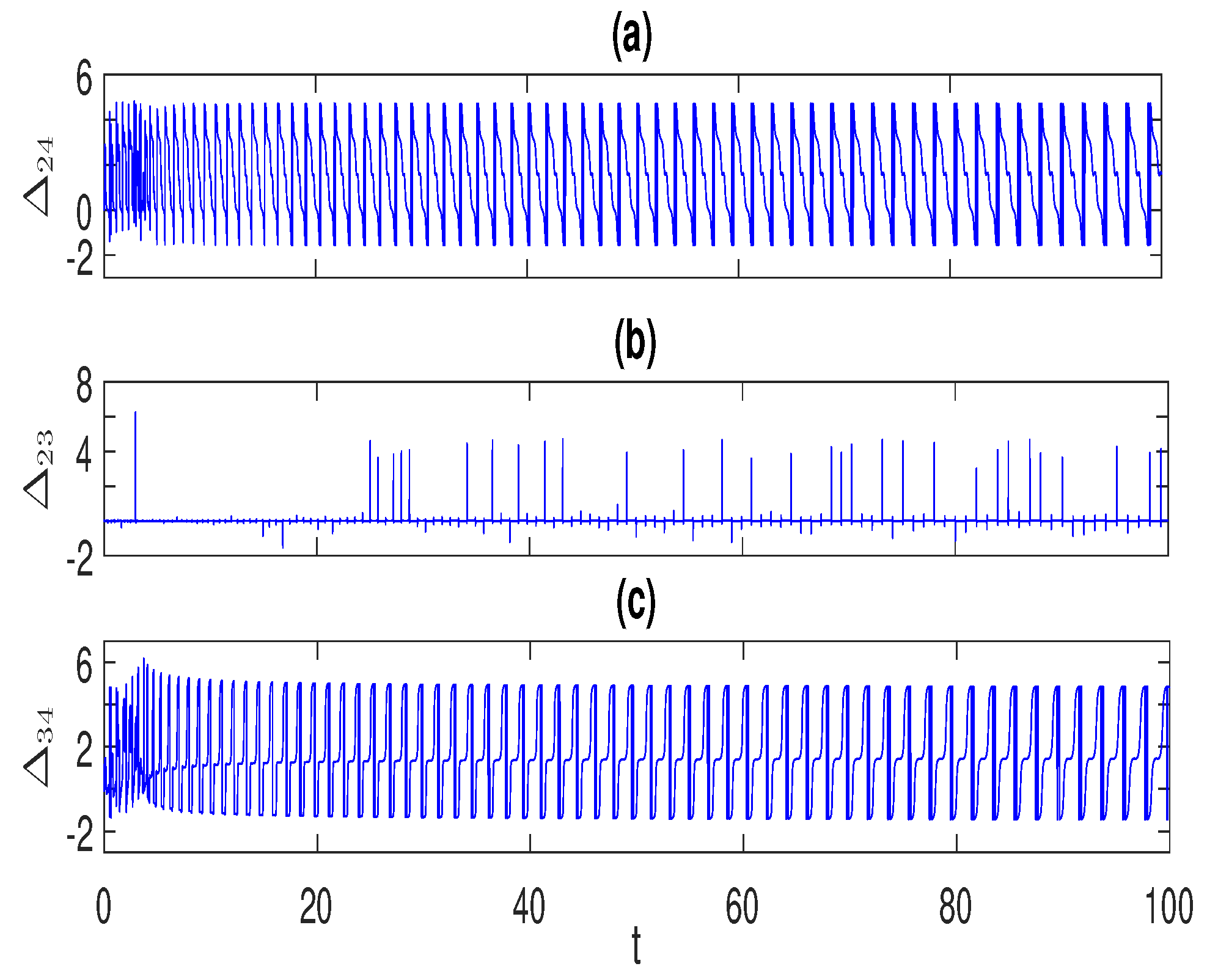
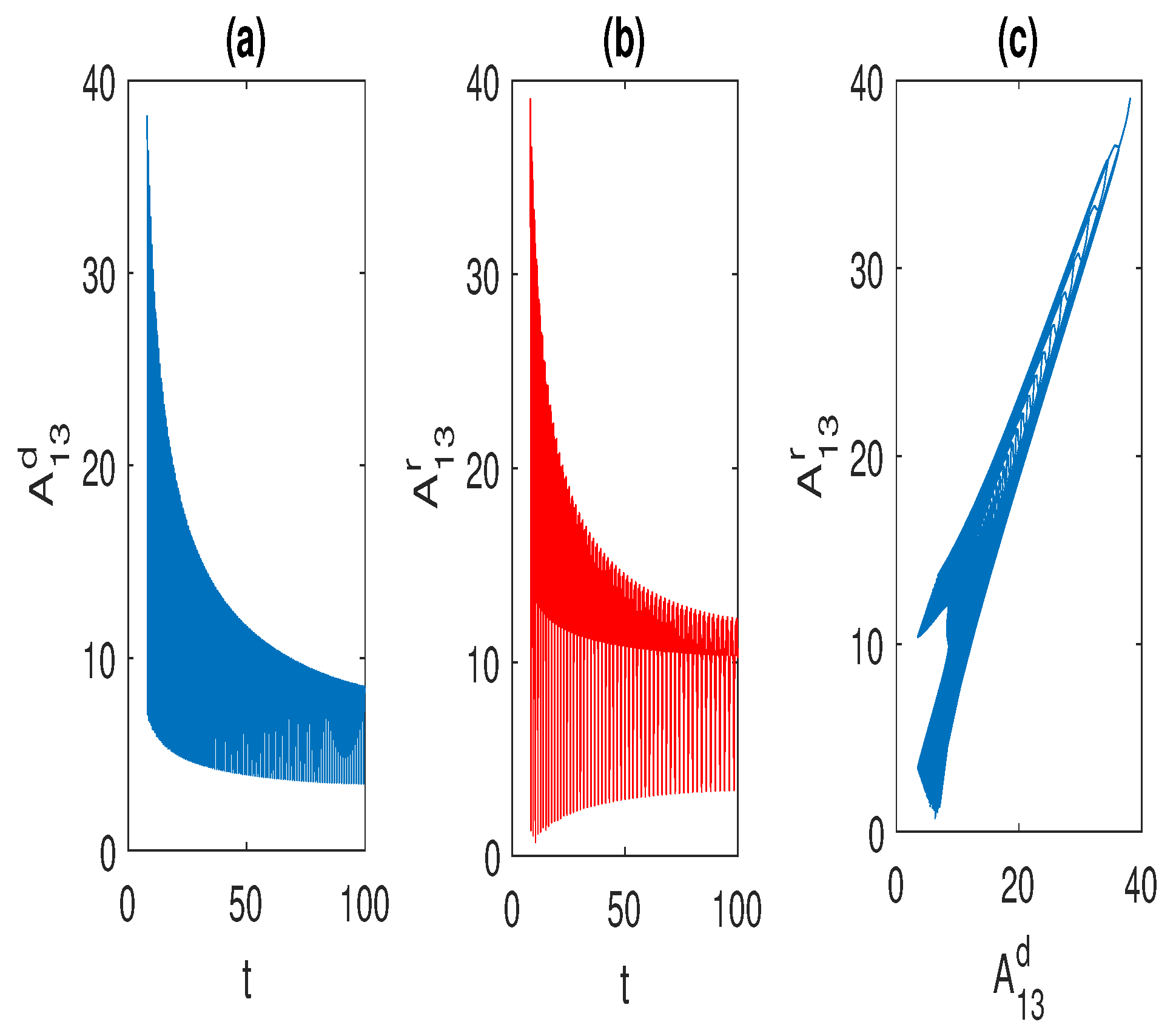
5. Illustrative Example for APS
6. An Image Encryption for APS
6.1. The Process of Encryption
6.2. The Process of Decryption
6.3. Experimental Results
6.3.1. Visual Analysis
6.3.2. Information Entropy
6.3.3. Histogram Analysis
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hillbrand, J.; Auth, D.; Piccardo, M.; Opačak, N.; Gornik, E.; Strasser, G.; Capasso, F.; Breuer, S.; Schwarz, B. In-phase and anti-phase synchronization in a laser frequency comb. Phys. Rev. Lett. 2020, 124, 023901. [Google Scholar] [CrossRef]
- Mao, X.; Sun, Y.; Wang, L.; Guo, Y.; Gao, Z.; Wang, Y.; Li, S.; Yan, L.; Wang, A. Instability of optical phase synchronization between chaotic semiconductor lasers. Opt. Lett. 2021, 46, 2824–2827. [Google Scholar] [CrossRef]
- Dörfler, F.; Bullo, F. Synchronization in complex networks of phase oscillators: A survey. Automatica 2014, 50, 1539–1564. [Google Scholar] [CrossRef]
- Xie, Y.; Yao, Z.; Ma, J. Phase synchronization and energy balance between neurons. Front. Inf. Technol. Electron. Eng. 2022, 23, 1407–1420. [Google Scholar] [CrossRef]
- Fell, J.; Axmacher, N. The role of phase synchronization in memory processes. Nat. Rev. Neurosci. 2011, 12, 105–118. [Google Scholar] [CrossRef]
- Xiu-Qin, F.; Ke, S. Phase synchronization and anti-phase synchronization of chaos for degenerate optical parametric oscillator. Chin. Phys. 2005, 14, 1526. [Google Scholar] [CrossRef]
- Arnulfo, G.; Wang, S.H.; Myrov, V.; Toselli, B.; Hirvonen, J.; Fato, M.; Nobili, L.; Cardinale, F.; Rubino, A.; Zhigalov, A.; et al. Long-range phase synchronization of high-frequency oscillations in human cortex. Nat. Commun. 2020, 11, 5363. [Google Scholar] [CrossRef]
- Chakrabarti, B.; Shelley, M.J.; Fürthauer, S. Collective Motion and Pattern Formation in Phase-Synchronizing Active Fluids. Phys. Rev. Lett. 2023, 130, 128202. [Google Scholar] [CrossRef]
- Tallon-Baudry, C.; Bertrand, O.; Delpuech, C.; Pernier, J. Stimulus specificity of phase-locked and non-phase-locked 40 Hz visual responses in human. J. Neurosci. 1996, 16, 4240–4249. [Google Scholar] [CrossRef]
- Blasius, B.; Huppert, A.; Stone, L. Complex dynamics and phase synchronization in spatially extended ecological systems. Nature 1999, 399, 354–359. [Google Scholar] [CrossRef]
- Totz, J.F.; Snari, R.; Yengi, D.; Tinsley, M.R.; Engel, H.; Showalter, K. Phase-lag synchronization in networks of coupled chemical oscillators. Phys. Rev. E 2015, 92, 022819. [Google Scholar] [CrossRef]
- Kurths, J.; Schäfer, C.; Rosenblum, M.; Abel, H.H. Synchronization in Human Cardiorespiratory System. In Proceedings of the APS March Meeting Abstracts, Los Angeles, CA, USA, 16–20 March 1998; p. Q12.05. [Google Scholar]
- Shi, Y.; Li, T.; Zhu, J. Complete Phase Synchronization of Nonidentical High-Dimensional Kuramoto Model. J. Stat. Phys. 2023, 190, 6. [Google Scholar] [CrossRef]
- Mahmoud, G.M.; Mahmoud, E.E. Phase and antiphase synchronization of two identical hyperchaotic complex nonlinear systems. Nonlinear Dyn. 2010, 61, 141–152. [Google Scholar] [CrossRef]
- Mahmoud, E.E. Modified projective phase synchronization of chaotic complex nonlinear systems. Math. Comput. Simul. 2013, 89, 69–85. [Google Scholar] [CrossRef]
- Yadav, V.K.; Prasad, G.; Srivastava, M.; Das, S. Combination–combination phase synchronization among non-identical fractional order complex chaotic systems via nonlinear control. Int. J. Dyn. Control 2019, 7, 330–340. [Google Scholar] [CrossRef]
- Mahmoud, G.M.; Ahmed, M.E.; Abed-Elhameed, T.M. On fractional-order hyperchaotic complex systems and their generalized function projective combination synchronization. Optik 2017, 130, 398–406. [Google Scholar] [CrossRef]
- Boccaletti, S.; Kurths, J.; Osipov, G.; Valladares, D.; Zhou, C. The synchronization of chaotic systems. Phys. Rep. 2002, 366, 1–101. [Google Scholar] [CrossRef]
- Kpomahou, Y.; Adéchinan, J.; Hinvi, L. Effects of quartic nonlinearities and constant excitation force on nonlinear dynamics of plasma oscillations modeled by a Liénard-type oscillator with asymmetric double well potential. Indian J. Phys. 2022, 96, 3247–3266. [Google Scholar] [CrossRef]
- Mahmoud, G.M.; Abed-Elhameed, T.M.; Elbadry, M.M. A class of different fractional-order chaotic (hyperchaotic) complex duffing-van der pol models and their circuits implementations. J. Comput. Nonlinear Dyn. 2021, 16, 121005. [Google Scholar] [CrossRef]
- Mahmoud, G.M.; Abed-Elhameed, T.M.; Khalaf, H. On fractional and distributed order hyperchaotic systems with line and parabola of equilibrium points and their synchronization. Phys. Scr. 2021, 96, 115201. [Google Scholar] [CrossRef]
- Zhu, Q.; Wang, H. Output feedback stabilization of stochastic feedforward systems with unknown control coefficients and unknown output function. Automatica 2018, 87, 166–175. [Google Scholar] [CrossRef]
- Li, W.; Guan, Y.; Cao, J.; Xu, F. A note on global stability of a degenerate diffusion avian influenza model with seasonality and spatial Heterogeneity. Appl. Math. Lett. 2024, 148, 108884. [Google Scholar] [CrossRef]
- Kpomahou, Y.; Agbélélé, K.; Tokpohozin, N.; Yamadjako, A. Influence of Amplitude-Modulated Force and Nonlinear Dissipation on Chaotic Motions in a Parametrically Excited Hybrid Rayleigh–Van der Pol–Duffing Oscillator. Int. J. Bifurc. Chaos 2023, 33, 2330006. [Google Scholar] [CrossRef]
- Wolf, A.; Swift, J.B.; Swinney, H.L.; Vastano, J.A. Determining Lyapunov exponents from a time series. Phys. D Nonlinear Phenom. 1985, 16, 285–317. [Google Scholar] [CrossRef]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al Themairi, A.; Mahmoud, G.M.; Farghaly, A.A.; Abed-Elhameed, T.M. Complex Rayleigh–van-der-Pol–Duffing Oscillators: Dynamics, Phase, Antiphase Synchronization, and Image Encryption. Fractal Fract. 2023, 7, 886. https://doi.org/10.3390/fractalfract7120886
Al Themairi A, Mahmoud GM, Farghaly AA, Abed-Elhameed TM. Complex Rayleigh–van-der-Pol–Duffing Oscillators: Dynamics, Phase, Antiphase Synchronization, and Image Encryption. Fractal and Fractional. 2023; 7(12):886. https://doi.org/10.3390/fractalfract7120886
Chicago/Turabian StyleAl Themairi, Asma, Gamal M. Mahmoud, Ahmed A. Farghaly, and Tarek M. Abed-Elhameed. 2023. "Complex Rayleigh–van-der-Pol–Duffing Oscillators: Dynamics, Phase, Antiphase Synchronization, and Image Encryption" Fractal and Fractional 7, no. 12: 886. https://doi.org/10.3390/fractalfract7120886
APA StyleAl Themairi, A., Mahmoud, G. M., Farghaly, A. A., & Abed-Elhameed, T. M. (2023). Complex Rayleigh–van-der-Pol–Duffing Oscillators: Dynamics, Phase, Antiphase Synchronization, and Image Encryption. Fractal and Fractional, 7(12), 886. https://doi.org/10.3390/fractalfract7120886