


General Methods to Synchronize Fractional Discrete Reaction–Diffusion Systems Applied to the Glycolysis Model


 , ,
, ,  , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Basic Tools and Problem Formulation
3. Nonlinear Approach
4. Linear Scheme
5. The Fractional Discrete Glycolysis Model and Its Synchronization
- Case 1.
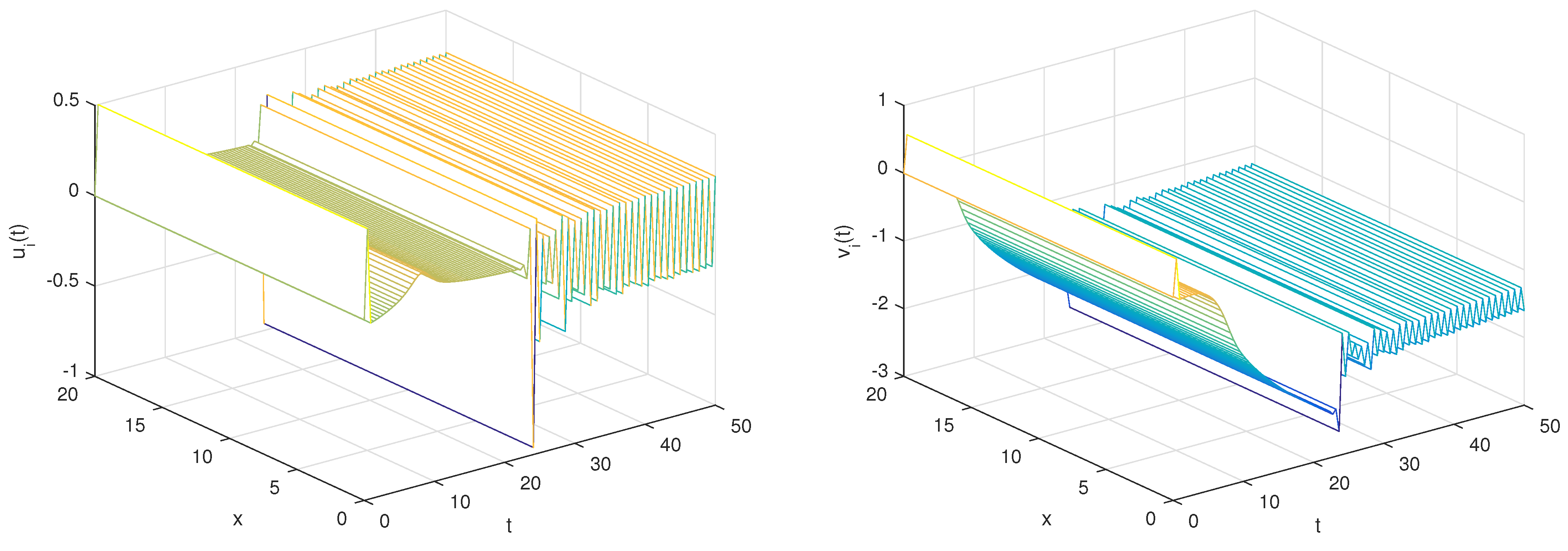
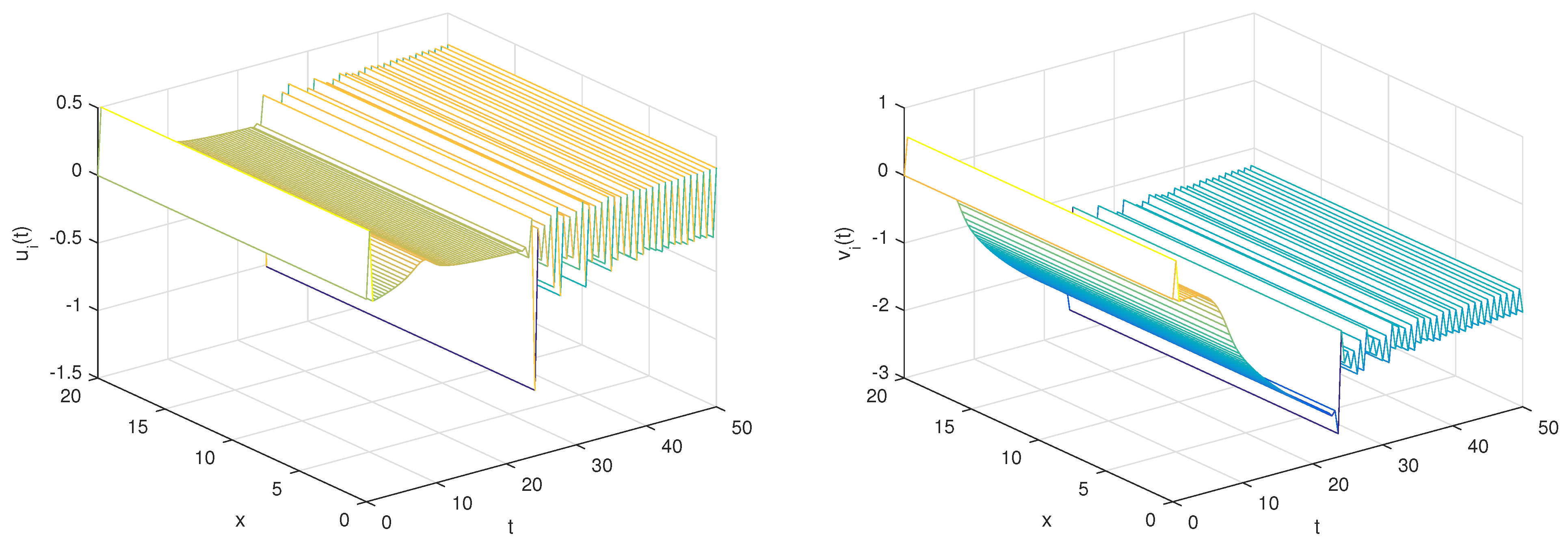
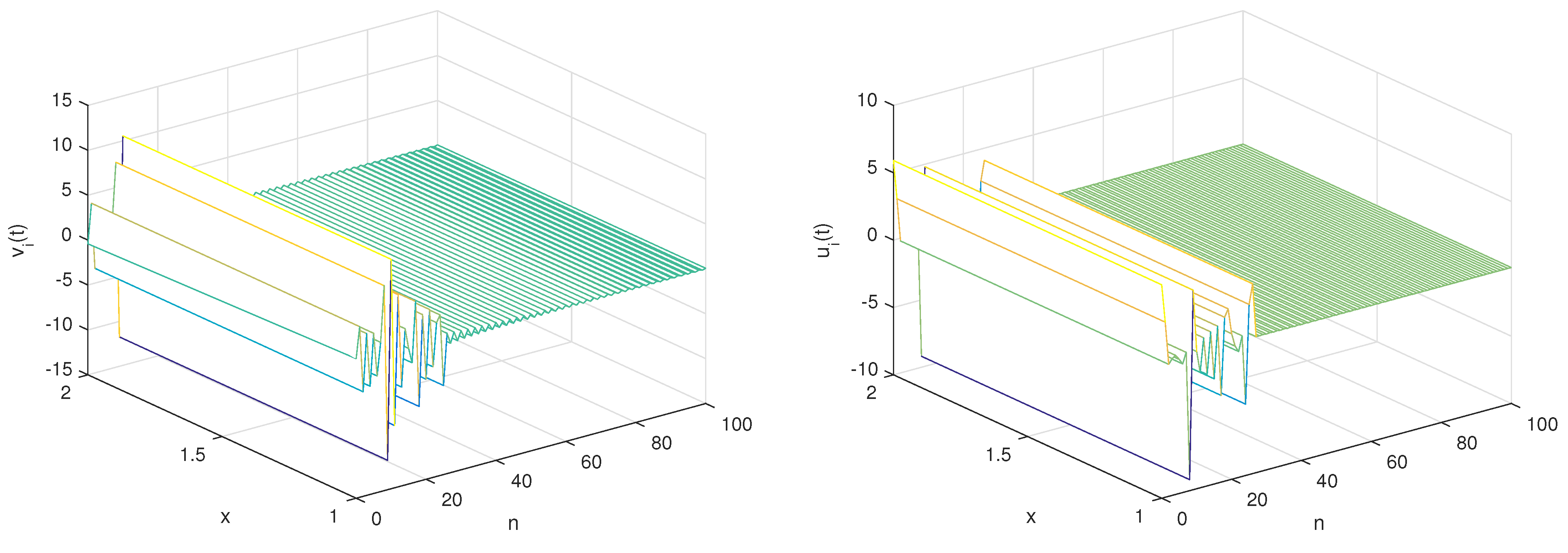
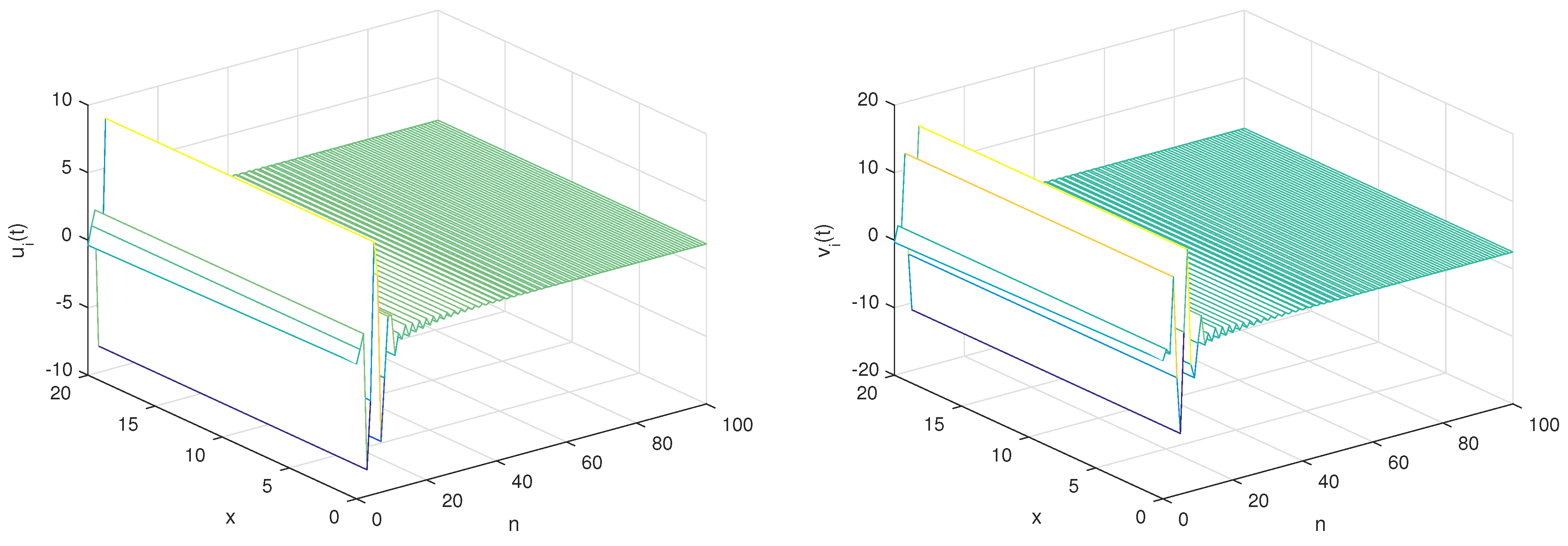
- With the set of parameters,and the initial conditionsTo commence, the conditions stipulated in Theorem 3 are met, ensuring the applicability of the following linear controllers for governing the discrete fractional reaction–diffusion master–slave systems.By employing the given parameters, it becomes evident from Figure 1 and Figure 2 that the numerical solutions of the master–slave system exhibit a pronounced state of complete synchronization. Furthermore, Figure 3 portrays the error solution, underscoring its distinct trajectory toward asymptotic convergence to zero.
- Case 2.
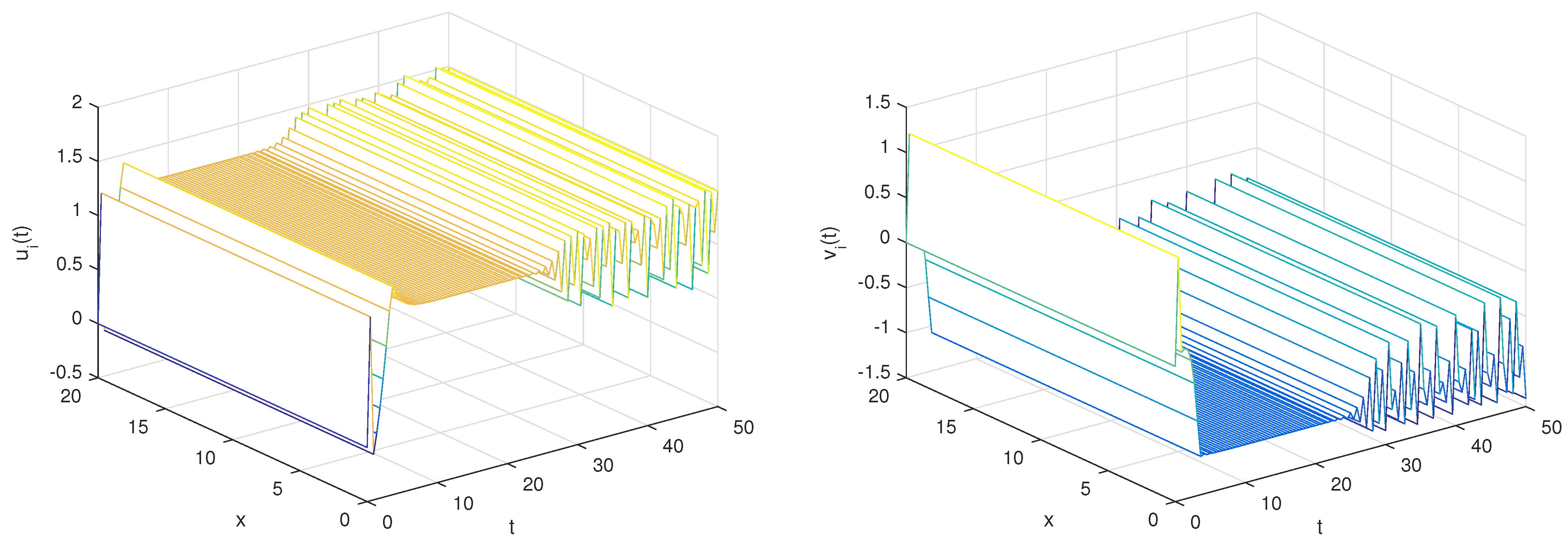
- With the set of parametersand the initial conditionsaccording to the guidelines provided in Theorem 2, the presence of a control matrix D facilitates the attainment of complete synchronization between the systems (26) and (27). The selection of matrix D can be made as follows:Hence, systems (26) and (27) exhibit complete global synchronization, as illustrated in Figure 4 and Figure 5. Additionally, the temporal progression of the error system states, denoted as and , is visualized in Figure 6.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Britton, N.F. Reaction–diffusion Equations and Their Applications to Biology; Academic Press: Cambridge, MA, USA, 1986. [Google Scholar]
- Song, Y.; Zhang, T.; Peng, Y. Turing–Hopf bifurcation in the reaction–diffusion equations and its applications. Commun. Nonlinear Sci. Numer. Simul. 2016, 33, 229–258. [Google Scholar] [CrossRef]
- Zhong, C.K.; Yang, M.H.; Sun, C.Y. The existence of global attractors for the norm-to-weak continuous semigroup and application to the nonlinear reaction–diffusion equations. J. Differ. Eq. 2006, 223, 367–399. [Google Scholar] [CrossRef]
- Kuttler, C. Reaction–diffusion equations and their application on bacterial communication. In Handbook of Statistics; Elsevier: Amsterdam, The Netherlands, 2017; pp. 55–91. [Google Scholar]
- Lam, K.Y.; Lou, Y. Introduction to Reaction–Diffusion Equations: Theory and Applications to Spatial Ecology and Evolutionary Biology; Springer Nature: Berlin/Heidelberg, Germany, 2022. [Google Scholar]
- Cosner, C. Reaction–diffusion equations and ecological modeling. In Tutorials in Mathematical Biosciences IV: Evolution and Ecology; Springer: Berlin/Heidelberg, Germany, 2008; pp. 77–115. [Google Scholar]
- Henry, B.I.; Wearne, S.L. Fractional reaction–diffusion. Phys. A Stat. Mech. Its Appl. 2000, 276, 448–455. [Google Scholar] [CrossRef]
- Seki, K.; Wojcik, M.; Tachiya, M. Fractional reaction–diffusion equation. J. Chem. Phys. 2003, 119, 2165–2170. [Google Scholar] [CrossRef]
- Gafiychuk, V.V.; Datsko, B.Y. Pattern formation in a fractional reaction–diffusion system. Phys. A Stat. Mech. Its Appl. 2006, 365, 300–306. [Google Scholar] [CrossRef]
- Saxena, R.K.; Mathai, A.M.; Haubold, H.J. Solution of generalized fractional reaction–diffusion equations. Astrophys. Space Sci. 2006, 305, 305–313. [Google Scholar] [CrossRef]
- Baeumer, B.; Kovács, M.; Meerschaert, M.M. Numerical solutions for fractional reaction–diffusion equations. Comput. Math. Appl. 2008, 55, 2212–2226. [Google Scholar] [CrossRef]
- Chen, L.; Qu, J.; Chai, Y.; Wu, R.; Qi, G. Synchronization of a class of fractional-order chaotic neural networks. Entropy 2013, 15, 3265–3276. [Google Scholar] [CrossRef]
- Ostalczyk, P. Discrete Fractional Calculus: Applications in Control and Image Processing; World Scientific: Singapore, 2015. [Google Scholar]
- Atici, F.M.; Uyanik, M. Analysis of discrete fractional operators. Appl. Anal. Discret. Math. 2015, 139–149. [Google Scholar] [CrossRef]
- Abdeljawad, T.; Banerjee, S.; Wu, G.C. Discrete tempered fractional calculus for new chaotic systems with short memory and image encryption. Optik 2020, 218, 163698. [Google Scholar] [CrossRef]
- Aticıi, F.M.; Sengul, S. Modeling with fractional difference equations. J. Math. Anal. Appl. 2010, 369, 1–9. [Google Scholar] [CrossRef]
- Algehyne, E.A.; Ibrahim, M. Fractal-fractional order mathematical vaccine model of COVID-19 under non-singular kernel. Chaos Solit. Fract. 2021, 150, 111150. [Google Scholar] [CrossRef] [PubMed]
- Saadeh, R.; Abbes, A.; Al-Husban, A.; Ouannas, A.; Grassi, G. The Fractional Discrete Predator–Prey Model: Chaos, Control and Synchronization. Fractal Fract. 2023, 7, 120. [Google Scholar] [CrossRef]
- Tuan, N.H.; Baleanu, D.; Thach, T.N.; O’Regan, D.; Can, N.H. Final value problem for nonlinear time fractional reaction–diffusion equation with discrete data. J. Comput. Appl. Math. 2020, 376, 112883. [Google Scholar] [CrossRef]
- Chen, H.; Lü, S.; Chen, W. Finite difference/spectral approximations for the distributed order time fractional reaction–diffusion equation on an unbounded domain. J. Comput. Phys. 2016, 315, 84–97. [Google Scholar] [CrossRef]
- Han, C.; Wang, Y.; Li, Z. Novel patterns in a class of fractional reaction–diffusion models with the Riesz fractional derivative. Math. Comput. Simul. 2022, 202, 149–163. [Google Scholar]
- Liu, F.; Turner, I.; Anh, V.; Yang, Q.; Burrage, K. A numerical method for the fractional Fitzhugh-Nagumo monodomain model. Anziam J. 2012, 54, C608–C629. [Google Scholar] [CrossRef]
- Majidabad, S.S.; Shandiz, H.T.; Hajizadeh, A. Decentralized sliding mode control of fractional-order large-scale nonlinear systems. Nonlinear Dyn. 2014, 77, 119–134. [Google Scholar] [CrossRef]
- Alsayyed, O.; Hioual, A.; Gharib, G.M.; Abualhomos, M.; Al-Tarawneh, H.; Alsauodi, M.S.; Abu-Alkishik, N.; Al-Husban, A.; Ouannas, A. On Stability of a Fractional Discrete Reaction–Diffusion Epidemic Model. Fractal Fract. 2023, 7, 729. [Google Scholar] [CrossRef]
- Kao, Y.; Cao, Y.; Chen, Y. Projective Synchronization for Uncertain Fractional reaction–diffusion Systems via Adaptive Sliding Mode Control Based on Finite-Time Scheme. IEEE Trans. Neural Netw. Learn. Syst. 2023. [Google Scholar] [CrossRef]
- Mesdoui, F.; Shawagfeh, N.; Ouannas, A. Global synchronization of fractional-order and integer-order N component reaction diffusion systems: Application to biochemical models. Math. Methods Appl. Sci. 2021, 44, 1003–1012. [Google Scholar] [CrossRef]
- Nicollin, X.; Olivero, A.; Sifakis, J.; Yovine, S. An Approach to the Description and Analysis of Hybrid Systems; International Hybrid Systems Workshop; Springer: Berlin/Heidelberg, Germany, 1991. [Google Scholar]
- Ouannas, A.; Wang, X.; Pham, V.T.; Grassi, G.; Huynh, V.V. Synchronization results for a class of fractional-order spatiotemporal partial differential systems based on fractional Lyapunov approach. Bound. Value Probl. 2019, 2019, 74. [Google Scholar] [CrossRef]
- Wu, G.C.; Baleanu, D. Chaos synchronization of the discrete fractional logistic map. Signal Process. 2014, 102, 96–99. [Google Scholar] [CrossRef]
- Zhou, T.; Li, C. Synchronization in fractional-order differential systems. Phys. D Nonlinear Phenom. 2005, 212, 111–125. [Google Scholar] [CrossRef]
- Yan, W.; Ding, Q. A new matrix projective synchronization of fractional-order discrete-time systems and its application in secure communication. IEEE Access 2020, 8, 147451–147458. [Google Scholar] [CrossRef]
- Abu Falahah, I.; Hioual, A.; Al-Qadri, M.O.; AL-Khassawneh, Y.A.; Al-Husban, A.; Hamadneh, T.; Ouannas, A. Synchronization of Fractional Partial Difference Equations via Linear Methods. Axioms 2023, 12, 728. [Google Scholar] [CrossRef]
- Wu, G.C.; Baleanu, D.; Zeng, S.D.; Deng, Z.G. Discrete fractional diffusion equation. Nonlinear Dyn. 2015, 80, 281–286. [Google Scholar] [CrossRef]
- Wu, G.C.; Baleanu, D.; Xie, H.P.; Zeng, S.D. Discrete fractional diffusion equation of chaotic order. Int. J. Bifurc. Chaos 2016, 26, 1650013. [Google Scholar] [CrossRef]
- Kelley, W.G.; Peterson, A.C. Difference Equations: An Introduction with Applications; Academic Press: Cambridge, MA, USA, 2001. [Google Scholar]
- Baleanu, D.; Wu, G.C.; Bai, Y.R.; Chen, F.L. Stability analysis of Caputo–like discrete fractional systems. Commun. Nonlinear Sci. Numer. Simul. 2017, 48, 520–530. [Google Scholar] [CrossRef]
- Hioual, A.; Ouannas, A.; Oussaeif, T.E.; Grassi, G.; Batiha, I.M.; Momani, S. On variable-order fractional discrete neural networks: Solvability and stability. Fractal Fract. 2022, 6, 119. [Google Scholar] [CrossRef]
- Elaydi, S. An Introduction to Difference Equations; Springer: San Antonio, TX, USA, 2015. [Google Scholar]
- Ahmed, N.; Ss, T.; Imran, M.; Rafiq, M.; Rehman, M.A.; Younis, M. Numerical analysis of auto-catalytic glycolysis model. AIP Adv. 2019, 9, 085213. [Google Scholar] [CrossRef]
- Al Noufaey, K.S. Stability analysis for Selkov-Schnakenberg reaction–diffusion system. Open Math. 2021, 19, 46–62. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hamadneh, T.; Hioual, A.; Saadeh, R.; Abdoon, M.A.; Almutairi, D.K.; Khalid, T.A.; Ouannas, A. General Methods to Synchronize Fractional Discrete Reaction–Diffusion Systems Applied to the Glycolysis Model. Fractal Fract. 2023, 7, 828. https://doi.org/10.3390/fractalfract7110828
Hamadneh T, Hioual A, Saadeh R, Abdoon MA, Almutairi DK, Khalid TA, Ouannas A. General Methods to Synchronize Fractional Discrete Reaction–Diffusion Systems Applied to the Glycolysis Model. Fractal and Fractional. 2023; 7(11):828. https://doi.org/10.3390/fractalfract7110828
Chicago/Turabian StyleHamadneh, Tareq, Amel Hioual, Rania Saadeh, Mohamed A. Abdoon, Dalal Khalid Almutairi, Thwiba A. Khalid, and Adel Ouannas. 2023. "General Methods to Synchronize Fractional Discrete Reaction–Diffusion Systems Applied to the Glycolysis Model" Fractal and Fractional 7, no. 11: 828. https://doi.org/10.3390/fractalfract7110828
APA StyleHamadneh, T., Hioual, A., Saadeh, R., Abdoon, M. A., Almutairi, D. K., Khalid, T. A., & Ouannas, A. (2023). General Methods to Synchronize Fractional Discrete Reaction–Diffusion Systems Applied to the Glycolysis Model. Fractal and Fractional, 7(11), 828. https://doi.org/10.3390/fractalfract7110828