
Exploring Propagating Soliton Solutions for the Fractional Kudryashov–Sinelshchikov Equation in a Mixture of Liquid–Gas Bubbles under the Consideration of Heat Transfer and Viscosity

 , , and
, , and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. The Fks Equation
1.2. Literature Review
2. Methodology and Resources
2.1. Conformable Fractional Derivative
2.2. The Working Mechanism of the mEDAM
- Step 1. Initially, a variable transformation is carried out: . It is important to note that there are several different representations for . This transformation transforms (9), resulting in a NODE with the following structure:
- Step 2. Following that, we propose the following as the analytical solution in closed form to Equation (10):In this context, the symbols serve as placeholders for indeterminate constants that will be approximated later. Furthermore, the function follows a first-order NODE as defined by the following structure:where and , and are unknown constants.
- Step 4. Equation (11) or its integral analogue is then substituted into Equation (10). Then, we collect all terms with identical orders of , which result in a polynomial equation in . The coefficients of this polynomial are then equated to zero, resulting in a set of algebraic equations in and other parameters.
- Step 5. The system is solved using the MAPLE program.
- Step 6. It is possible to obtain the soliton solutions for Equation (9) by solving for the previously obtained system of algebraic equations in unknown parameters and putting them into Equation (11), along with the solutions of produced from Equation (12). The following families show how to generate families of exact soliton solutions using the generic solution described in Equation (12).
- Family 1: Whenever and , we obtainandwhere .
- Family 2: Whenever and ,and
- Family 3: Whenever and ,and
- Family 4: Whenever and ,and
- Family 5: Whenever and ,and
- Family 6: Whenever and ,and
- Family 7: Whenever ,
- Family 8: Whenever , and where ,
- Family 9: Whenever ,
- Family 10: Whenever ,
- Family 11: Whenever , and ,and
- Family 12: Whenever , and ,where both q and p are larger than zero, they are often referred to as deformation parameters. The generalized trigonometric and hyperbolic functions are shown below:Similarly,
3. Soliton Solutions
- Case 1.
- Case 2.
- Case 3.
- Family 1.1. When ,and
- Family 1.2. When ,and
- Family 1.3. When and ,and
- Family 1.4. When and ,andwhere
- Family. 1.5. When and ,and
- Family 1.6. When and ,and
- Family 1.7. When , we obtainwhere
- Family 2.1. When ,and
- Family 2.2. When ,and
- Family 2.3. When and ,and
- Family 2.4. When and ,and
- Family 2.5. When and ,and
- Family 2.6. When and ,and
- Family 2.7. When ,where
- Family 3.1. When and ,and
- Family 3.2. When and ,and
- Family 3.3. When and ,and
- Family 3.4. When and ,and
- Family 3.5. When and ,and
- Family 3.6. When and ,and
- Family 3.7. When ,
- Family 3.8. When ,
- Family 3.9. When , and ,and
- Family 3.10. When , and ,where
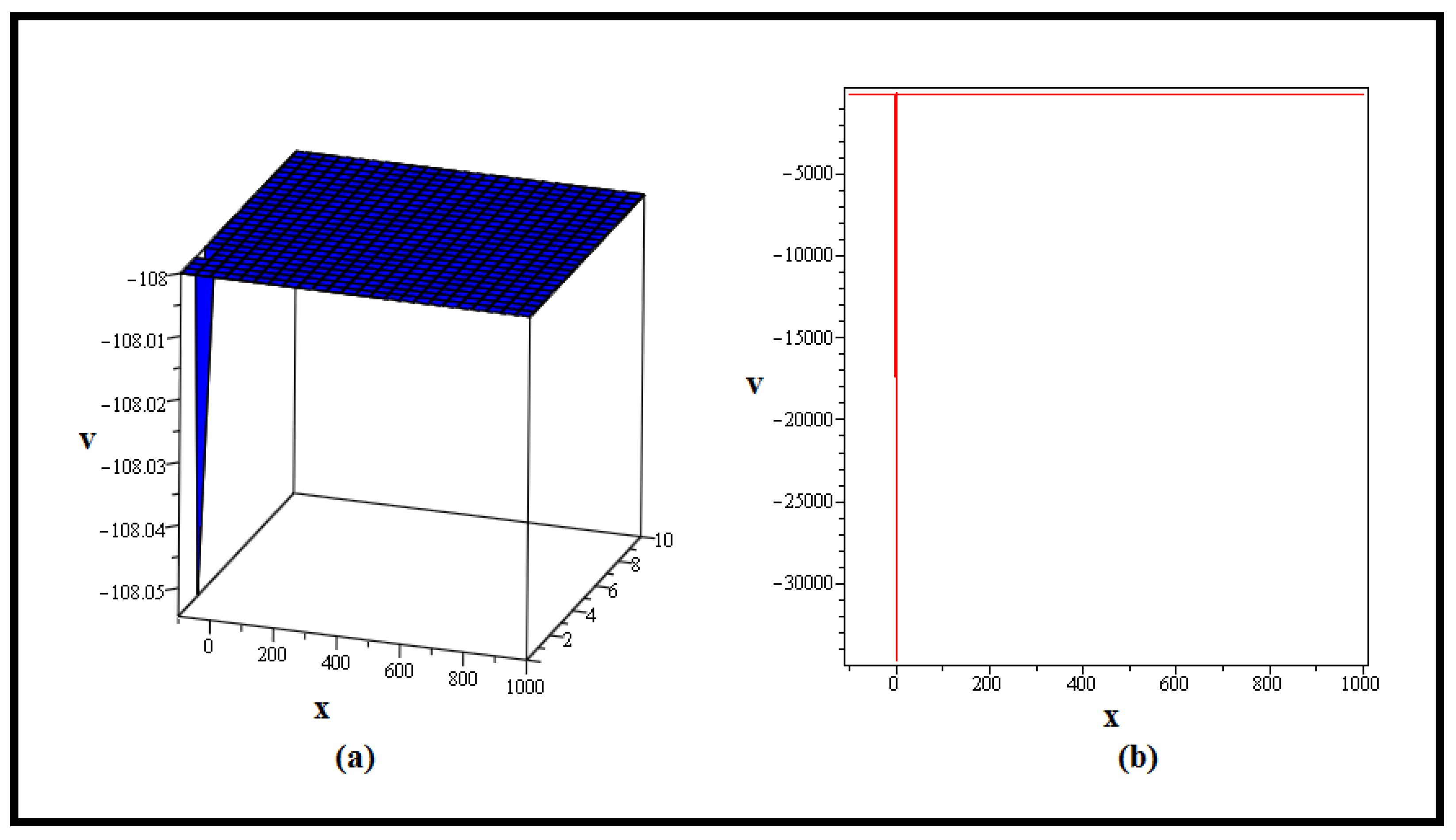
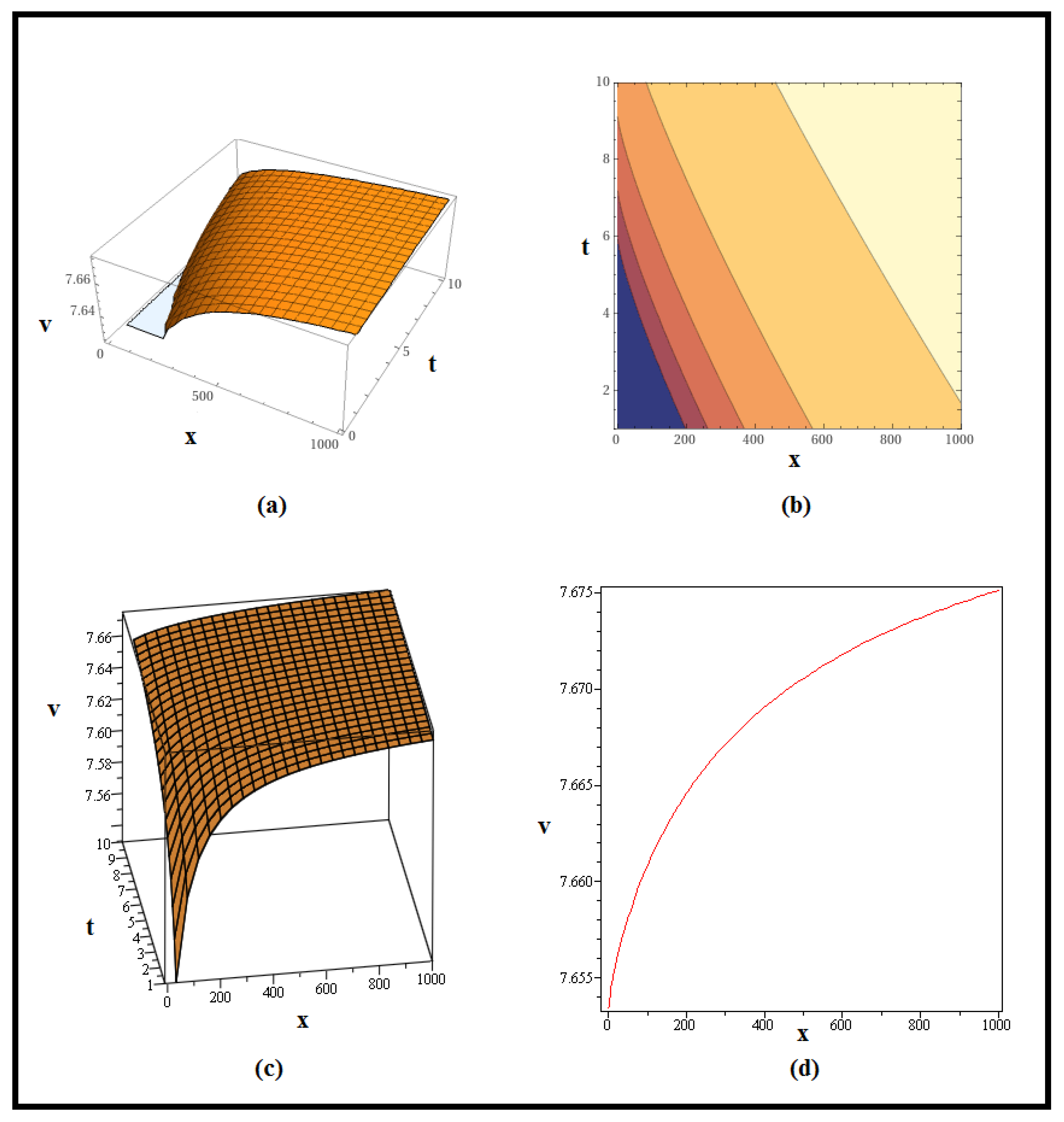
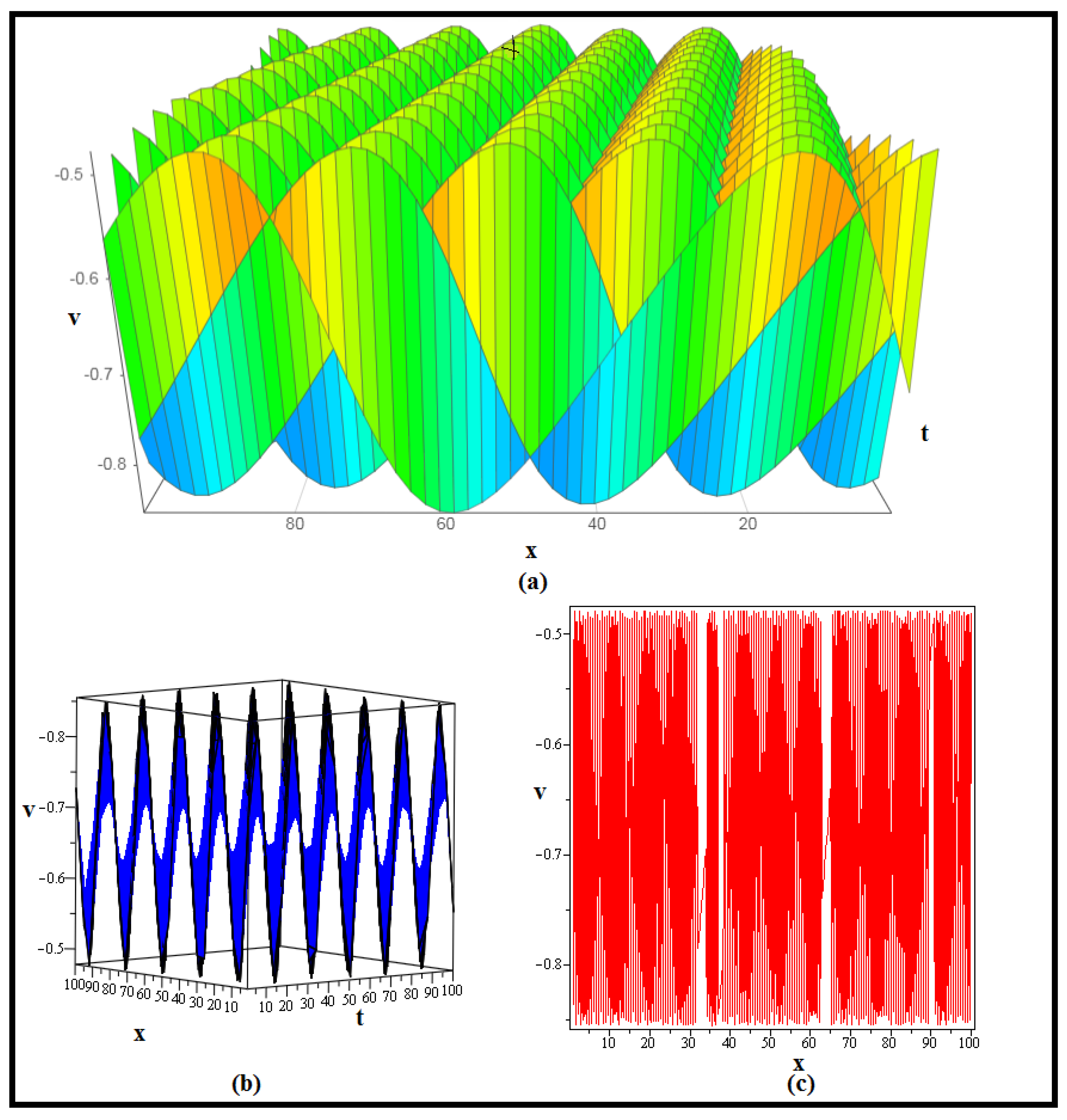
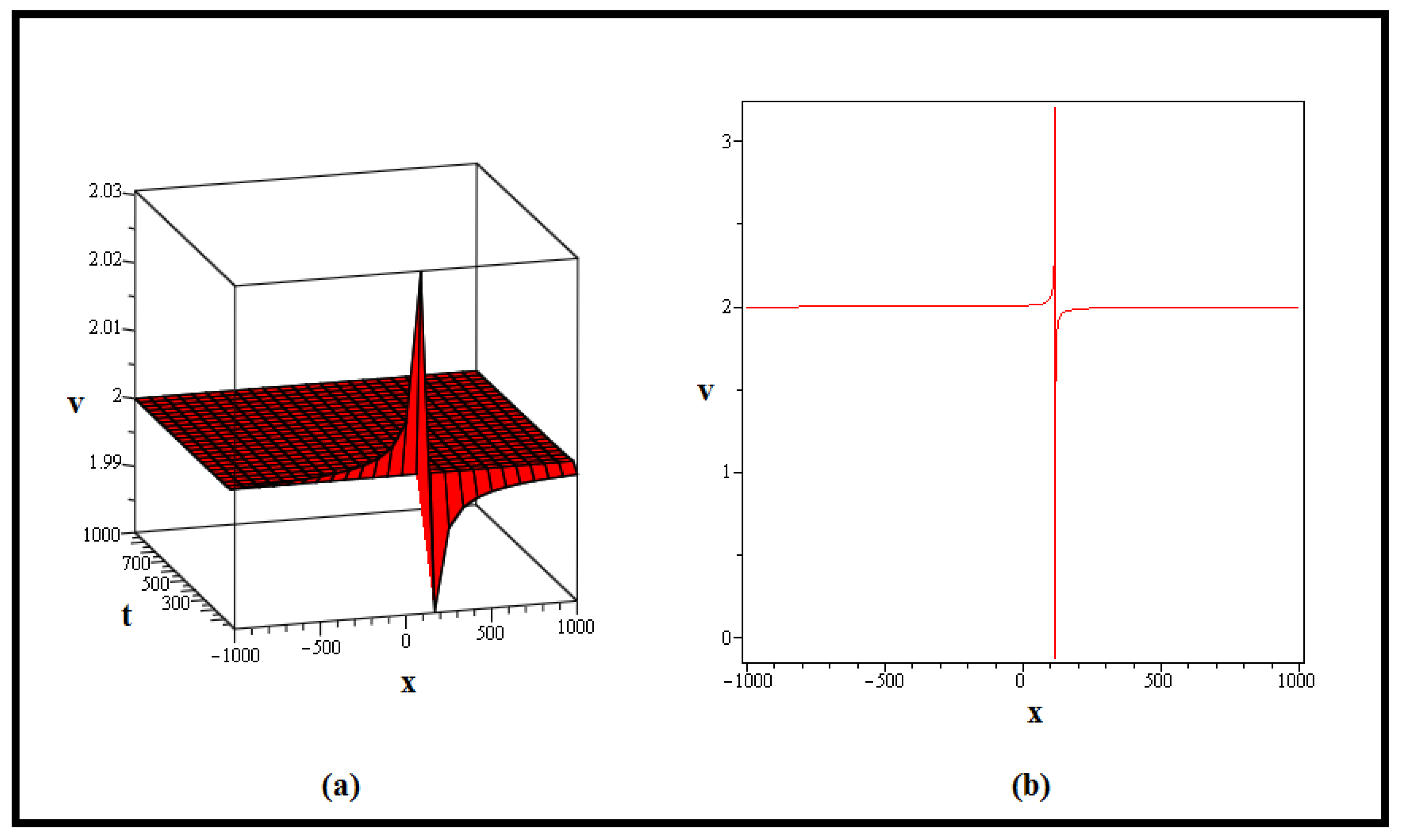
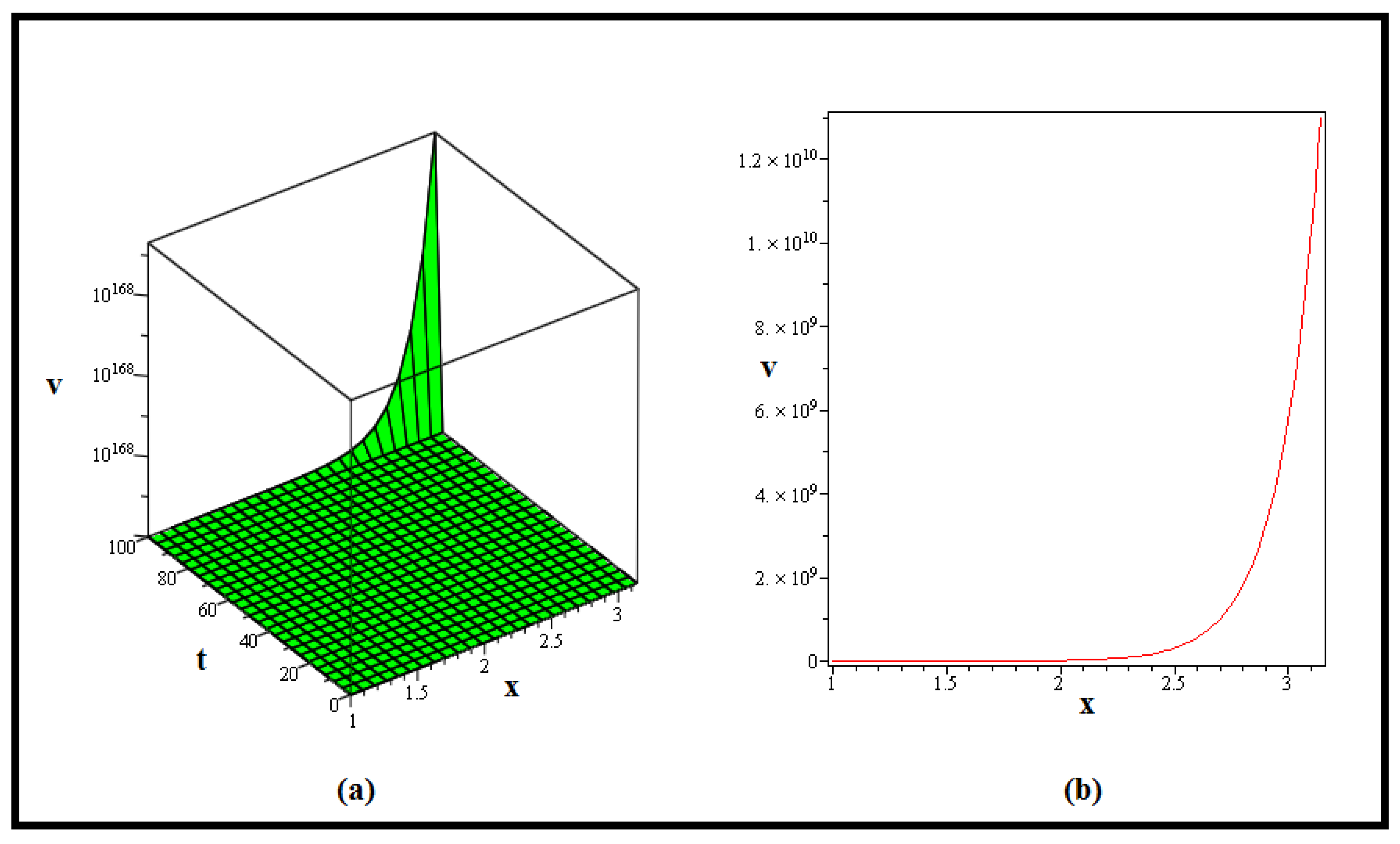
4. Discussion and Graphs
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kaplan, M.; Bekir, A. The modified simple equation method for solving some fractional-order nonlinear equations. Pramana 2016, 87, 1–5. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, H.Q. Fractional sub-equation method and its applications to nonlinear fractional PDEs. Phys. Lett. A 2011, 375, 1069–1073. [Google Scholar] [CrossRef]
- Kumar, D.; Singh, J.; Baleanu, D. Numerical computation of a fractional model of differential-difference equation. J. Comput. Nonlinear Dyn. 2016, 11, 061004. [Google Scholar] [CrossRef]
- Gurefe, Y. The generalized Kudryashov method for the nonlinear fractional partial differential equations with the beta-derivative. Rev. Mex. Física 2020, 66, 771–781. [Google Scholar] [CrossRef]
- Khan, H.; Shah, R.; Gómez-Aguilar, J.F.; Baleanu, D.; Kumam, P. Travelling waves solution for fractional-order biological population model. Math. Model. Nat. Phenom. 2021, 16, 32. [Google Scholar] [CrossRef]
- Zayed, E.M.; Amer, Y.A.; Shohib, R.M. The fractional complex transformation for nonlinear fractional partial differential equations in the mathematical physics. J. Assoc. Arab Univ. Basic Appl. Sci. 2016, 19, 59–69. [Google Scholar] [CrossRef]
- Neirameh, A. New fractional calculus and application to the fractional-order of extended biological population model. Bol. Soc. Parana. Mate. 2018, 36, 115–128. [Google Scholar] [CrossRef]
- Tarasov, V.E. On history of mathematical economics: Application of fractional calculus. Mathematics 2019, 7, 509. [Google Scholar] [CrossRef]
- Karamali, G.; Dehghan, M.; Abbaszadeh, M. Numerical solution of a time-fractional PDE in the electroanalytical chemistry by a local meshless method. Eng. Comput. 2019, 35, 87–100. [Google Scholar] [CrossRef]
- Mendez, A.J. On the propagation of regularity for solutions of the fractional Korteweg-de Vries equation. J. Differ. Equ. 2020, 269, 9051–9089. [Google Scholar] [CrossRef]
- Veeresha, P.; Prakasha, D.G.; Baskonus, H.M. Novel simulations to the time-fractional Fisher’s equation. Math. Sci. 2019, 13, 33–42. [Google Scholar] [CrossRef]
- Kurt, A.; Çenesiz, Y.; Tasbozan, O. On the solution of Burgers’ equation with the new fractional derivative. Open Phys. 2015, 13, 355–360. [Google Scholar] [CrossRef]
- Saha Ray, S.; Das, N. New optical soliton solutions of fractional perturbed nonlinear Schrödinger equation in nanofibers. Mod. Phys. Lett. B 2022, 36, 2150544. [Google Scholar] [CrossRef]
- Mirzazadeh, M. Topological and non-topological soliton solutions to some time-fractional differential equations. Pramana 2015, 85, 17–29. [Google Scholar] [CrossRef]
- Saha Ray, S.; Sagar, B. Numerical soliton solutions of fractional modified (2 + 1)-dimensional Konopelchenko–Dubrovsky equations in plasma physics. J. Comput. Nonlinear Dyn. 2022, 17, 011007. [Google Scholar] [CrossRef]
- Bouzari Liavoli, F.; Fakharian, A.; Khaloozadeh, H. Sub-optimal controller design for time-delay nonlinear partial differential equation systems: An extended state-dependent differential Riccati equation approach. Int. J. Syst. Sci. 2023, 54, 1815–1840. [Google Scholar] [CrossRef]
- Razzaq, W.; Zafar, A.; Ahmed, H.M.; Rabie, W.B. Construction solitons for fractional nonlinear Schrödinger equation with β-time derivative by the new sub-equation method. J. Ocean Eng. Sci. 2022, 17, 1–7. [Google Scholar] [CrossRef]
- Khan 2022, H.; Baleanu, D.; Kumam, P.; Al-Zaidy, J.F. Families of travelling waves solutions for fractional-order extended shallow water wave equations, using an innovative analytical method. IEEE Access 2019, 7, 107523–107532. [Google Scholar] [CrossRef]
- Alsharidi, A.K.; Bekir, A. Discovery of New Exact Wave Solutions to the M-Fractional Complex Three Coupled Maccari’s System by Sardar Sub-Equation Scheme. Symmetry 2023, 15, 1567. [Google Scholar] [CrossRef]
- Gaber, A.; Ahmad, H. Solitary wave solutions for space-time fractional coupled integrable dispersionless system via generalized kudryashov method. Facta Univ. Ser. Math. Inform. 2021, 35, 1439–1449. [Google Scholar] [CrossRef]
- Dubey, S.; Chakraverty, S. Application of modified extended tanh method in solving fractional order coupled wave equations. Math. Comput. Simul. 2022, 198, 509–520. [Google Scholar] [CrossRef]
- Muhamad, K.A.; Tanriverdi, T.; Mahmud, A.A.; Baskonus, H.M. Interaction characteristics of the Riemann wave propagation in the (2 + 1)-dimensional generalized breaking soliton system. Int. J. Comput. Math. 2023, 100, 1340–1355. [Google Scholar] [CrossRef]
- Rezazadeh, H.; Mirhosseini-Alizamini, S.M.; Neirameh, A.; Souleymanou, A.; Korkmaz, A.; Bekir, A. Fractional Sine–Gordon equation approach to the coupled higgs system defined in time-fractional form. Iran. J. Sci. Technol. Trans. A Sci. 2019, 43, 2965–2973. [Google Scholar] [CrossRef]
- Yasmin, H.; Aljahdaly, N.H.; Saeed, A.M.; Shah, R. Investigating Symmetric Soliton Solutions for the Fractional Coupled Konno–Onno System Using Improved Versions of a Novel Analytical Technique. Mathematics 2023, 11, 2686. [Google Scholar] [CrossRef]
- Yasmin, H.; Aljahdaly, N.H.; Saeed, A.M.; Shah, R. Investigating Families of Soliton Solutions for the Complex Structured Coupled Fractional Biswas–Arshed Model in Birefringent Fibers Using a Novel Analytical Technique. Fractal Fract. 2023, 7, 491. [Google Scholar] [CrossRef]
- Yasmin, H.; Aljahdaly, N.H.; Saeed, A.M. and Shah, R. Probing Families of Optical Soliton Solutions in Fractional Perturbed Radhakrishnan–Kundu–Lakshmanan Model with Improved Versions of Extended Direct Algebraic Method. Fractal Fract. 2023, 7, 512. [Google Scholar] [CrossRef]
- Seadawy, A.R.; Iqbal, M.; Lu, D. Nonlinear wave solutions of the Kudryashov–Sinelshchikov dynamical equation in mixtures liquid-gas bubbles under the consideration of heat transfer and viscosity. J. Taibah Univ. Sci. 2019, 13, 1060–1072. [Google Scholar] [CrossRef]
- Kudryashov, N.A.; Sinelshchikov, D.I. Nonlinear waves in bubbly liquids with consideration for viscosity and heat transfer. Phys. Lett. A 2010, 374, 2011–2016. [Google Scholar] [CrossRef]
- Yue, C.; Khater, M.; Attia, R.A.; Lu, D. The plethora of explicit solutions of the fractional KS equation through liquid–gas bubbles mix under the thermodynamic conditions via Atangana–Baleanu derivative operator. Adv. Differ. Equ. 2020, 2020, 62. [Google Scholar] [CrossRef]
- Korteweg, D.J.; De Vries, G. XLI. On the change of form of long waves advancing in a rectangular canal and on a new type of long stationary waves. Lond. Edinb. Dublin Philos. Mag. J. Sci. 1895, 39, 422–443. [Google Scholar] [CrossRef]
- Yang, X.J.; Tenreiro Machado, J.A.; Baleanu, D.; Cattani, C. On exact traveling-wave solutions for local fractional Korteweg-de Vries equation. Chaos Interdiscip. J. Nonlinear Sci. 2016, 26, 084312. [Google Scholar] [CrossRef] [PubMed]
- Shu, J.J. The proper analytical solution of the Korteweg-de Vries-Burgers equation. arXiv 2014, arXiv:1403.3636. [Google Scholar]
- Saad 2014, K.M.; AL-Shareef, E.H.; Alomari, A.K.; Baleanu, D.; Gómez-Aguilar, J.F. On exact solutions for time-fractional Korteweg-de Vries and Korteweg-de Vries-Burger’s equations using homotopy analysis transform method. Chin. J. Phys. 2020, 63, 149–162. [Google Scholar] [CrossRef]
- Ryabov, P.N.; Sinelshchikov, D.I.; Kochanov, M.B. Application of the Kudryashov method for finding exact solutions of the high order nonlinear evolution equations. Appl. Math. Comput. 2011, 218, 3965–3972. [Google Scholar] [CrossRef]
- Liu, J.G.; Yang, X.J.; Feng, Y.Y.; Geng, L.L. Symmetry analysis of the generalized space and time fractional Korteweg–de Vries equation. Int. J. Geom. Methods Mod. Phys. 2021, 18, 2150235. [Google Scholar] [CrossRef]
- Gupta, A.K.; Ray, S.S. On the solitary wave solution of fractional Kudryashov–Sinelshchikov equation describing nonlinear wave processes in a liquid containing gas bubbles. Appl. Math. Comput. 2017, 298, 1–12. [Google Scholar] [CrossRef]
- Ali, K.K.; Maneea, M. New approximation solution for time-fractional Kudryashov-Sinelshchikov equation using novel technique. Alex. Eng. J. 2023, 72, 559–572. [Google Scholar] [CrossRef]
- Akram, G.; Sadaf, M.; Anum, N. Solutions of time-fractional Kudryashov–Sinelshchikov equation arising in the pressure waves in the liquid with gas bubbles. Opt. Quantum Electron. 2017, 49, 373. [Google Scholar] [CrossRef]
- Prakash, P. On group analysis, conservation laws and exact solutions of time-fractional Kudryashov–Sinelshchikov equation. Comput. Appl. Math. 2021, 40, 162. [Google Scholar] [CrossRef]
- Sarikaya, M.Z.; Budak, H.; Usta, H. On generalized the conformable fractional calculus. TWMS J. Appl. Eng. Math. 2019, 9, 792–799. [Google Scholar]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ali, R.; Hendy, A.S.; Ali, M.R.; Hassan, A.M.; Awwad, F.A.; Ismail, E.A.A. Exploring Propagating Soliton Solutions for the Fractional Kudryashov–Sinelshchikov Equation in a Mixture of Liquid–Gas Bubbles under the Consideration of Heat Transfer and Viscosity. Fractal Fract. 2023, 7, 773. https://doi.org/10.3390/fractalfract7110773
Ali R, Hendy AS, Ali MR, Hassan AM, Awwad FA, Ismail EAA. Exploring Propagating Soliton Solutions for the Fractional Kudryashov–Sinelshchikov Equation in a Mixture of Liquid–Gas Bubbles under the Consideration of Heat Transfer and Viscosity. Fractal and Fractional. 2023; 7(11):773. https://doi.org/10.3390/fractalfract7110773
Chicago/Turabian StyleAli, Rashid, Ahmed S. Hendy, Mohamed R. Ali, Ahmed M. Hassan, Fuad A. Awwad, and Emad A. A. Ismail. 2023. "Exploring Propagating Soliton Solutions for the Fractional Kudryashov–Sinelshchikov Equation in a Mixture of Liquid–Gas Bubbles under the Consideration of Heat Transfer and Viscosity" Fractal and Fractional 7, no. 11: 773. https://doi.org/10.3390/fractalfract7110773
APA StyleAli, R., Hendy, A. S., Ali, M. R., Hassan, A. M., Awwad, F. A., & Ismail, E. A. A. (2023). Exploring Propagating Soliton Solutions for the Fractional Kudryashov–Sinelshchikov Equation in a Mixture of Liquid–Gas Bubbles under the Consideration of Heat Transfer and Viscosity. Fractal and Fractional, 7(11), 773. https://doi.org/10.3390/fractalfract7110773