
Electronically Controlled Power-Law Filters Realizations

 ,
,  ,
,  ,
,  and
and 
Abstract
:1. Introduction
2. Power-Law Filters
2.1. Power-Law Filters Derived from 1st-Order Mother Functions
2.2. Power-Law Filters Derived from 2nd-Order Mother Functions
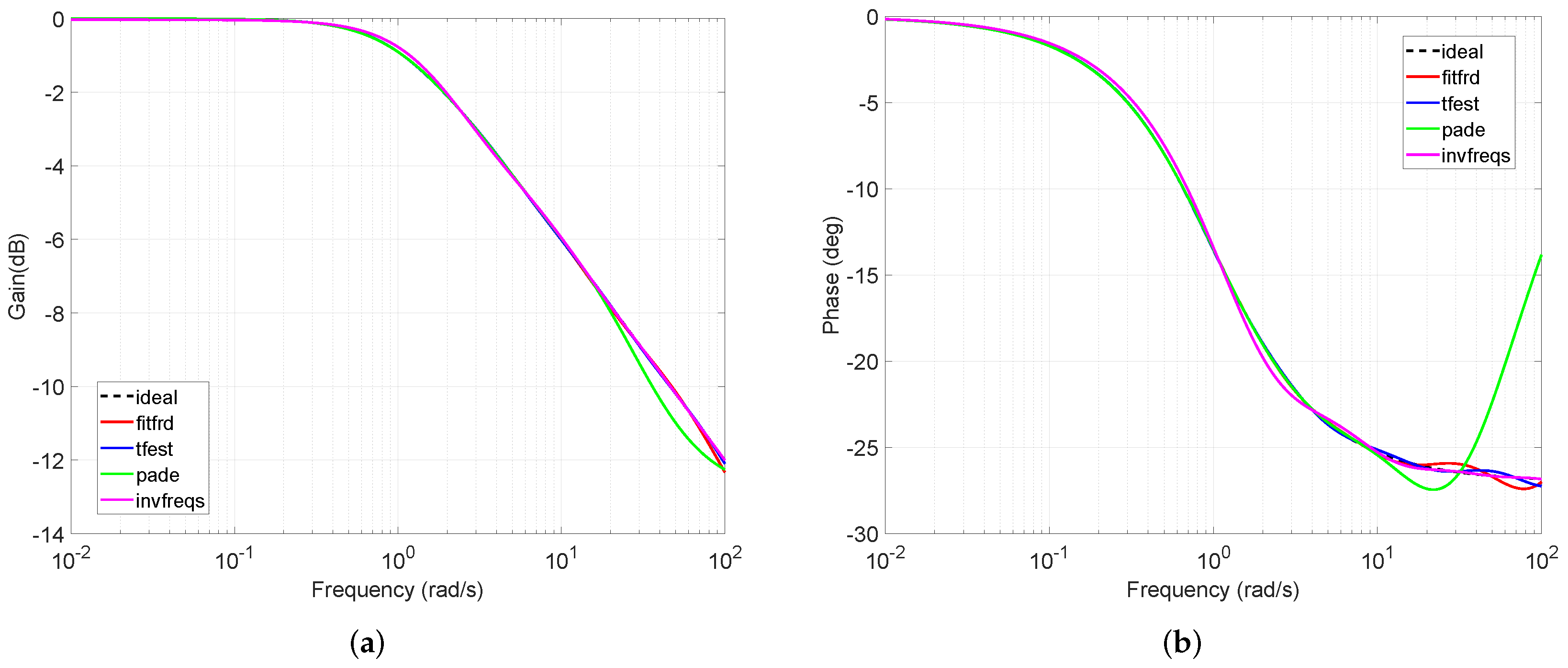
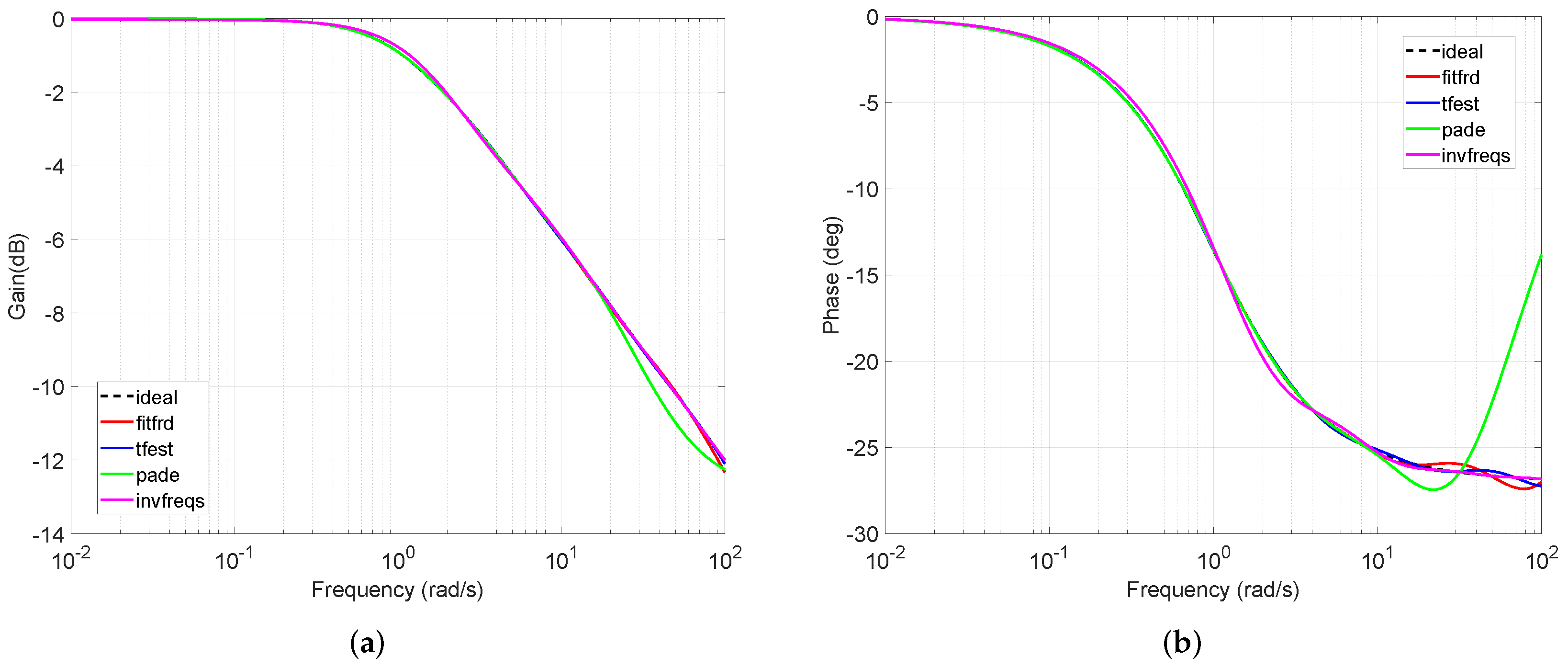
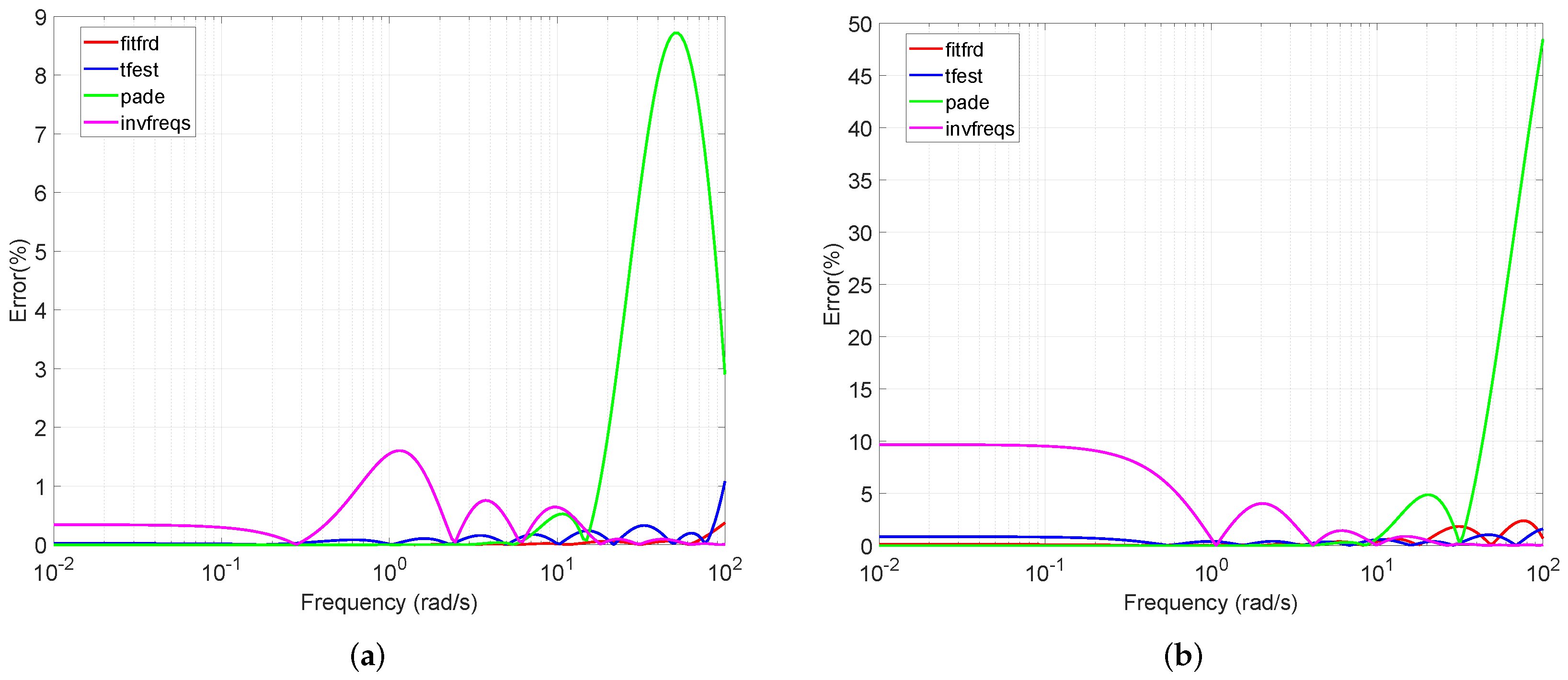
3. Approximation of Power-Law Filters’ Functions
- (a)
- Obtain the frequency-response data of the mother function within the desired frequency range using MATLAB freqresp function, then raise the obtained response to the power for deriving the final response,
- (b)
- Obtain the data of the final response using the MATLAB function frd,
- (c)
- Choose the desired value of the approximation order (which will be the order of the derived approximate integer-order transfer function).
- (a)
- to obtain the state-space model of the data using the command fitfrd, which is based on the Sanathanan–Koerner (SK) least square iterative method, and then to convert this model to a transfer function using the command ss2tf,
- (b)
- to directly obtain the transfer-function model of the data, using the tfest function,
- (c)
- to directly obtain the transfer-function model of the data, using the invfreqs function.
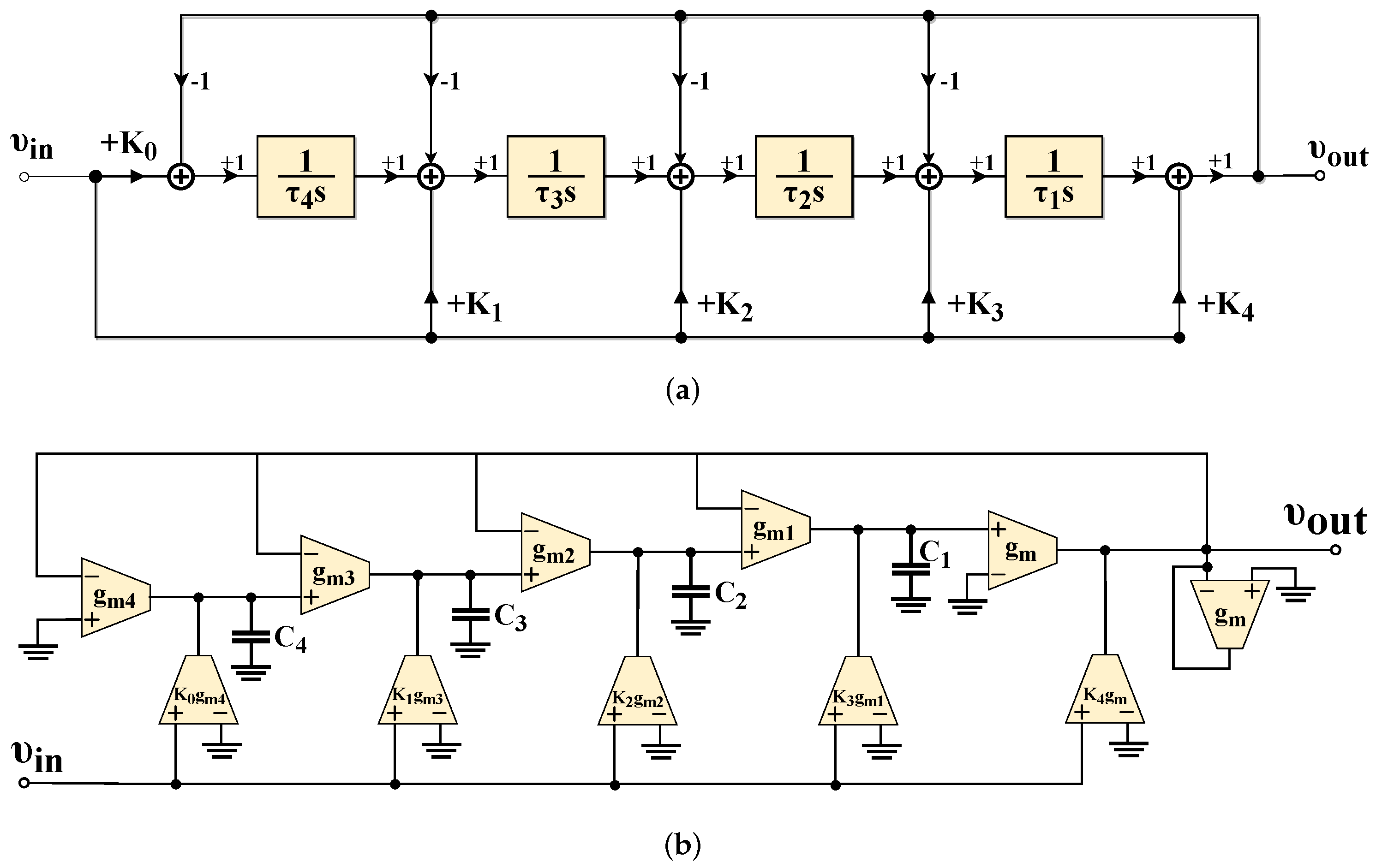
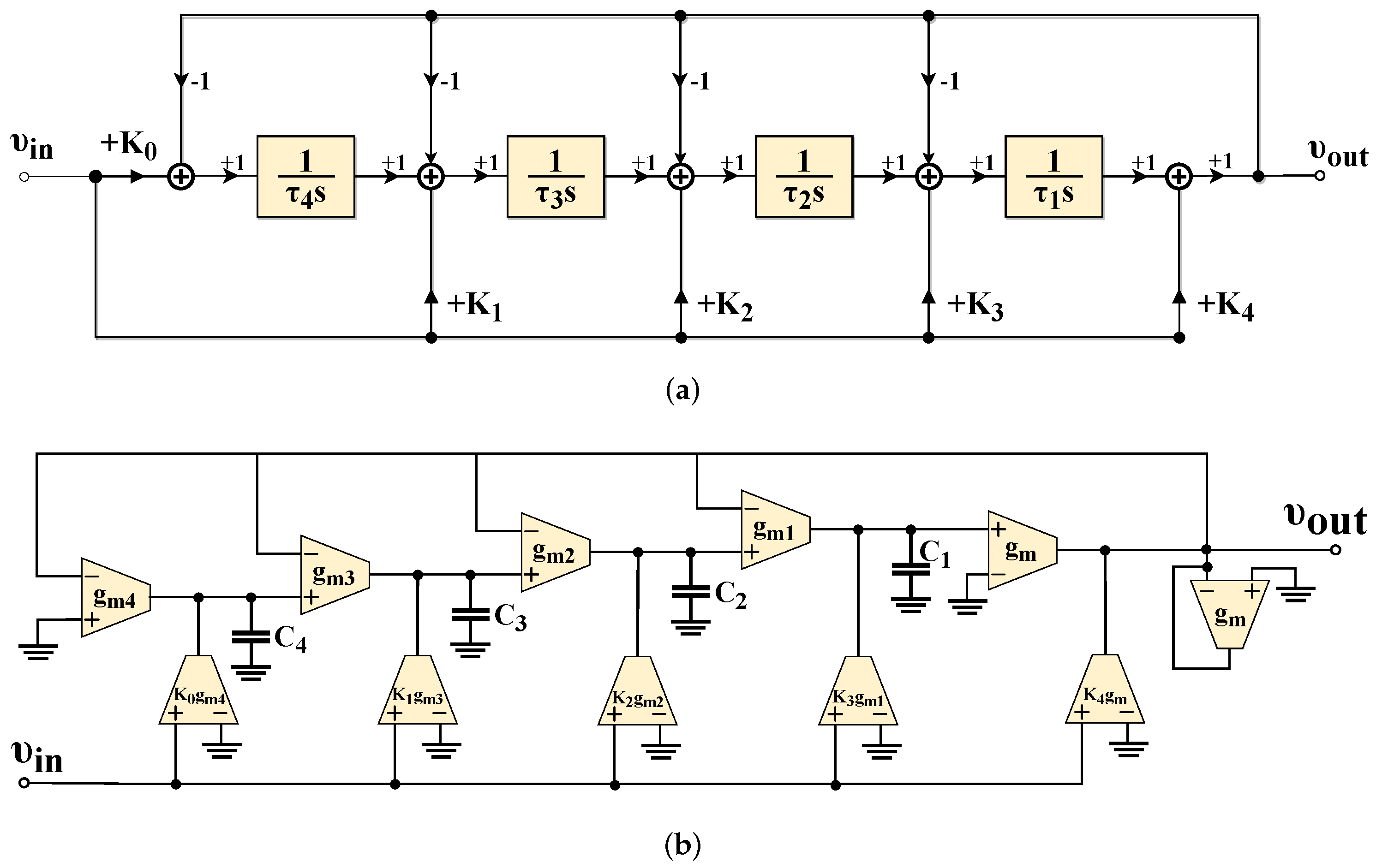
4. Proposed Electronically Tunable Scheme for Realizing all Possible Filter Functions
4.1. Transfer Functions of Filters Derived from 1st-Order Mother Functions
4.2. Transfer Functions of Filters Derived from 2nd-Order Mother Functions
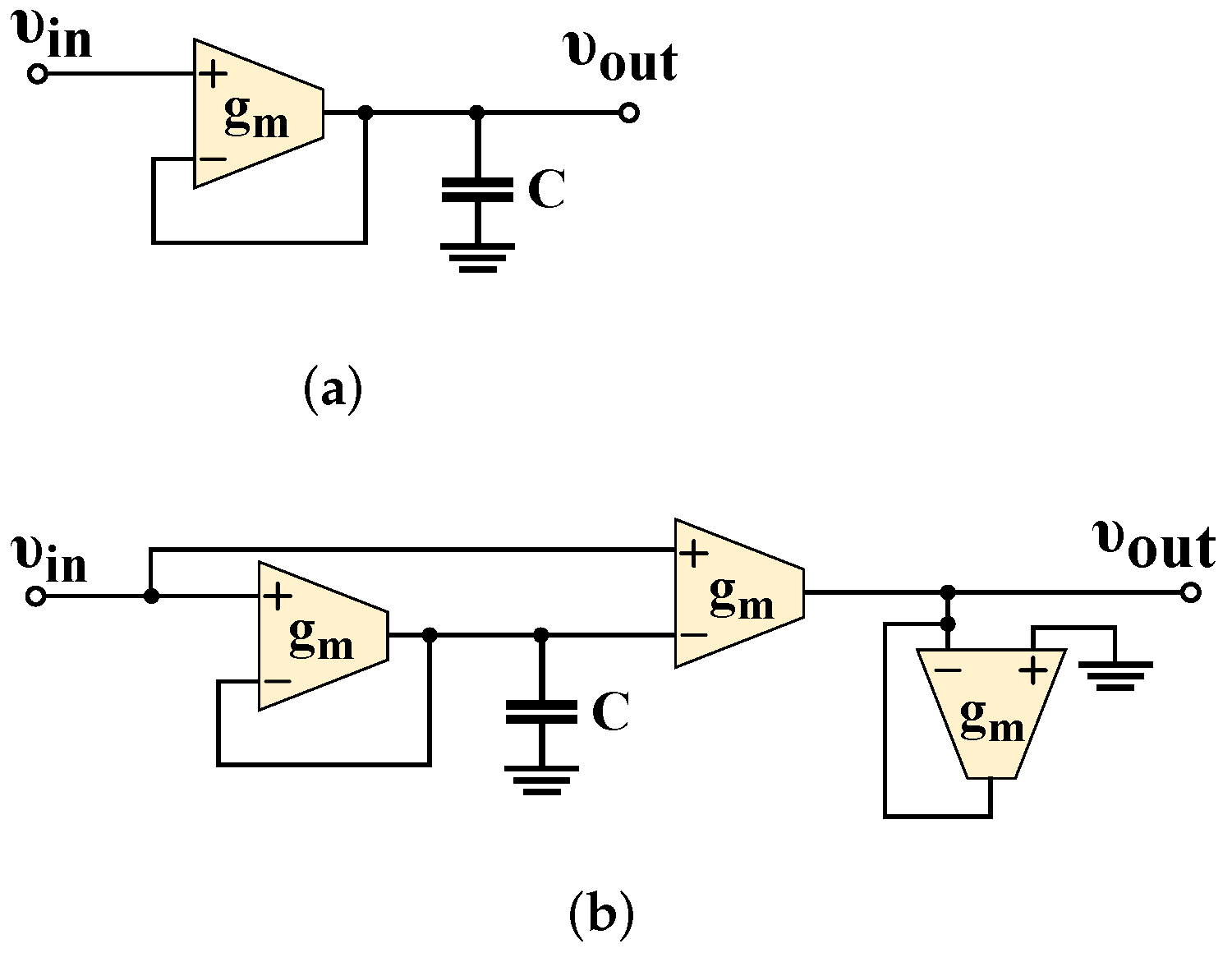
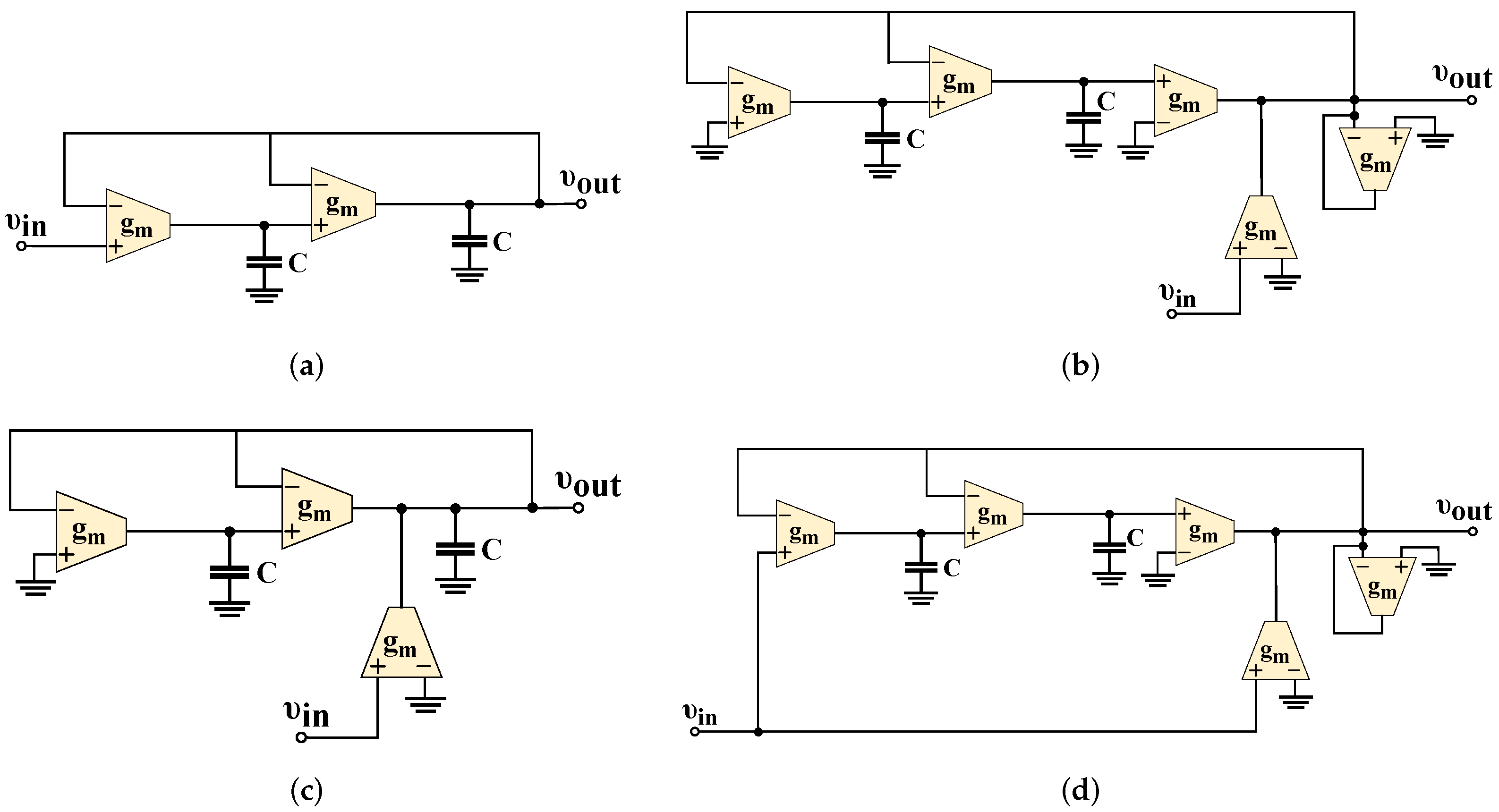
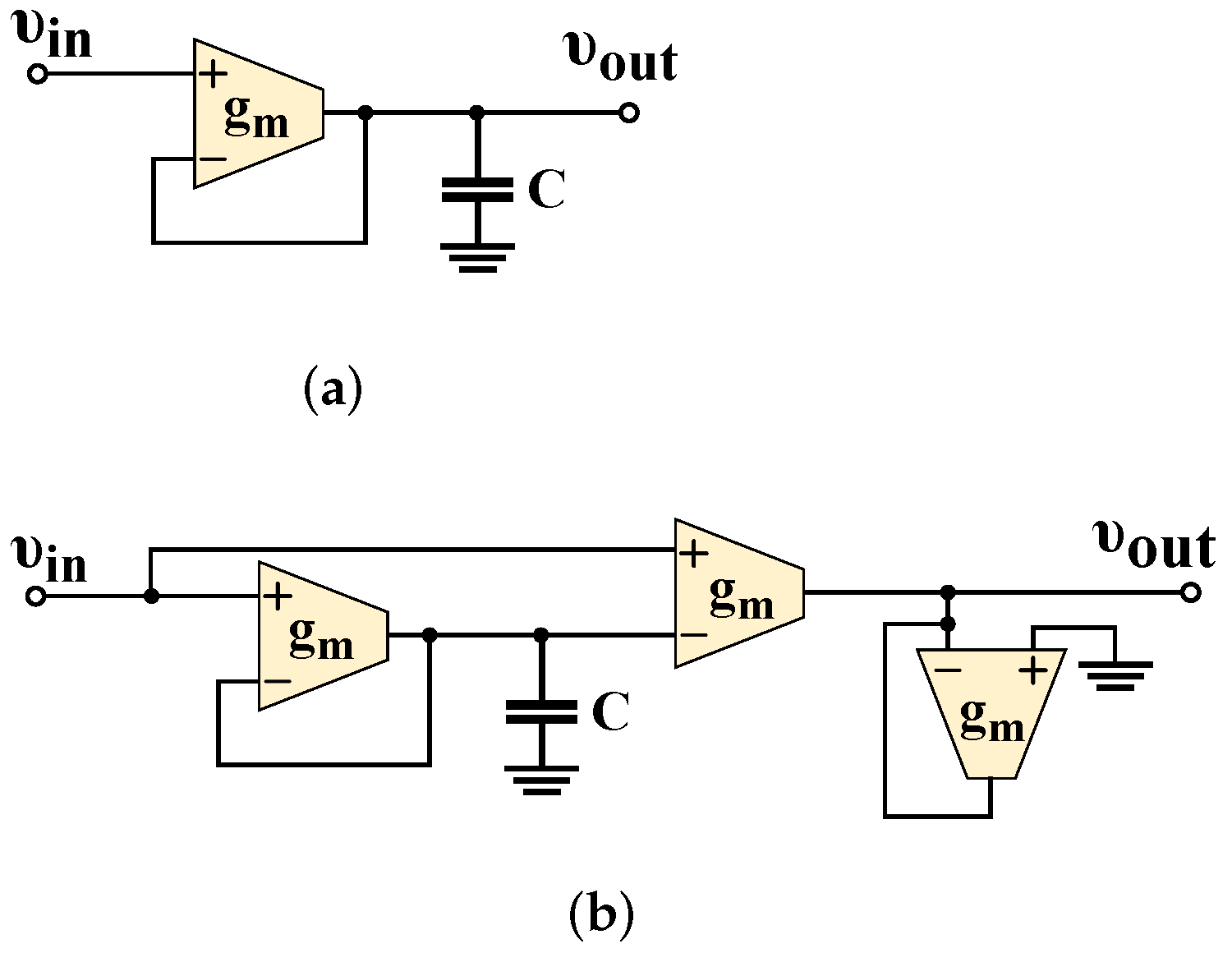
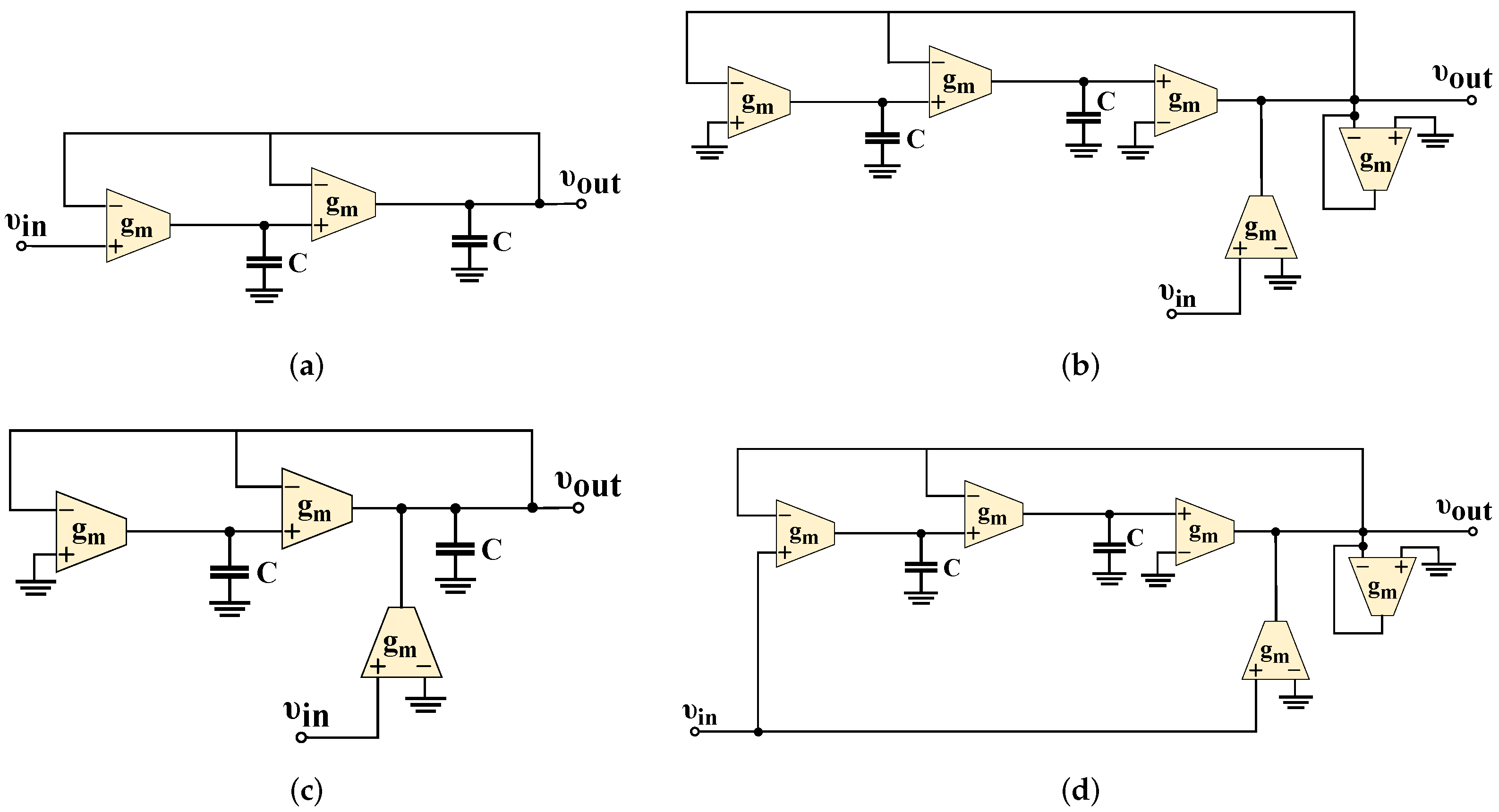
4.3. OTA-C Controllable Structure for Approximating the Behavior of Power-Law Filters
5. Simulation Results
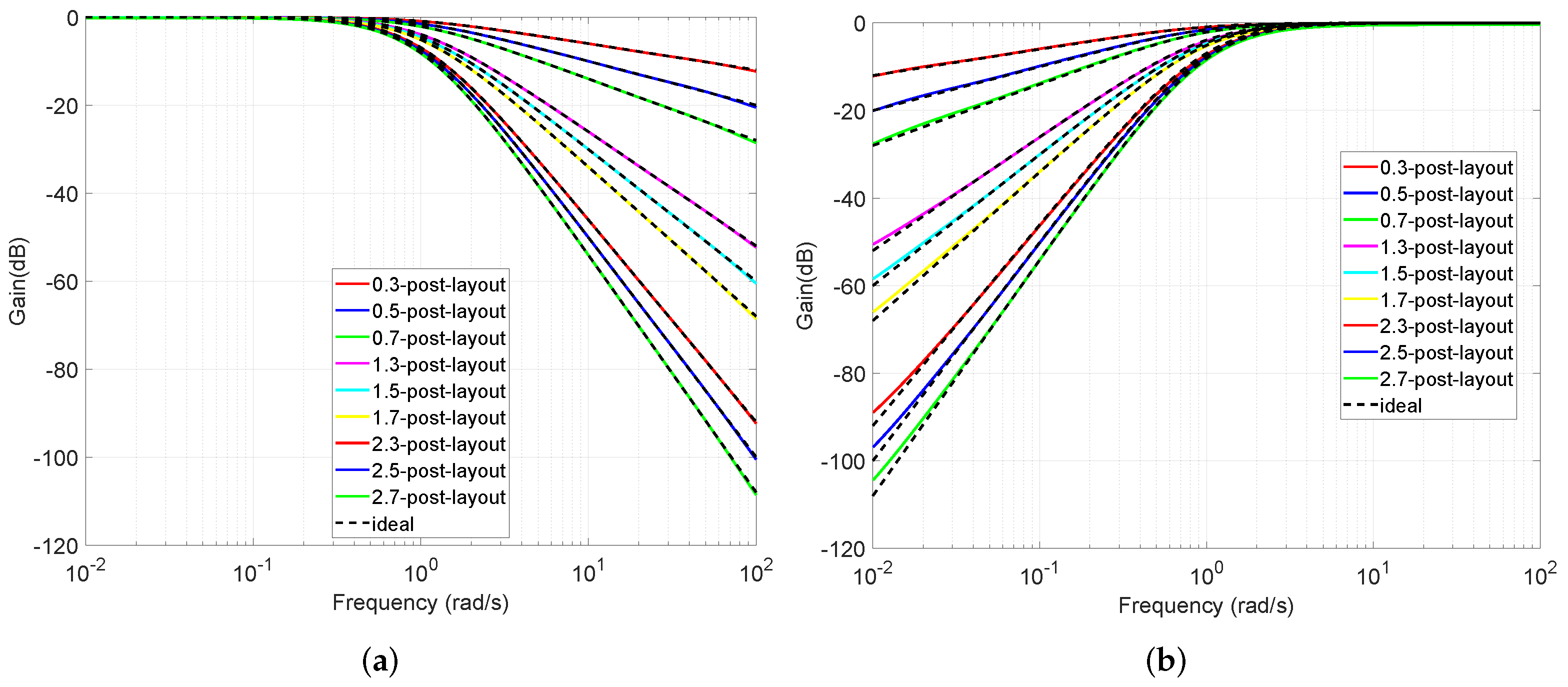
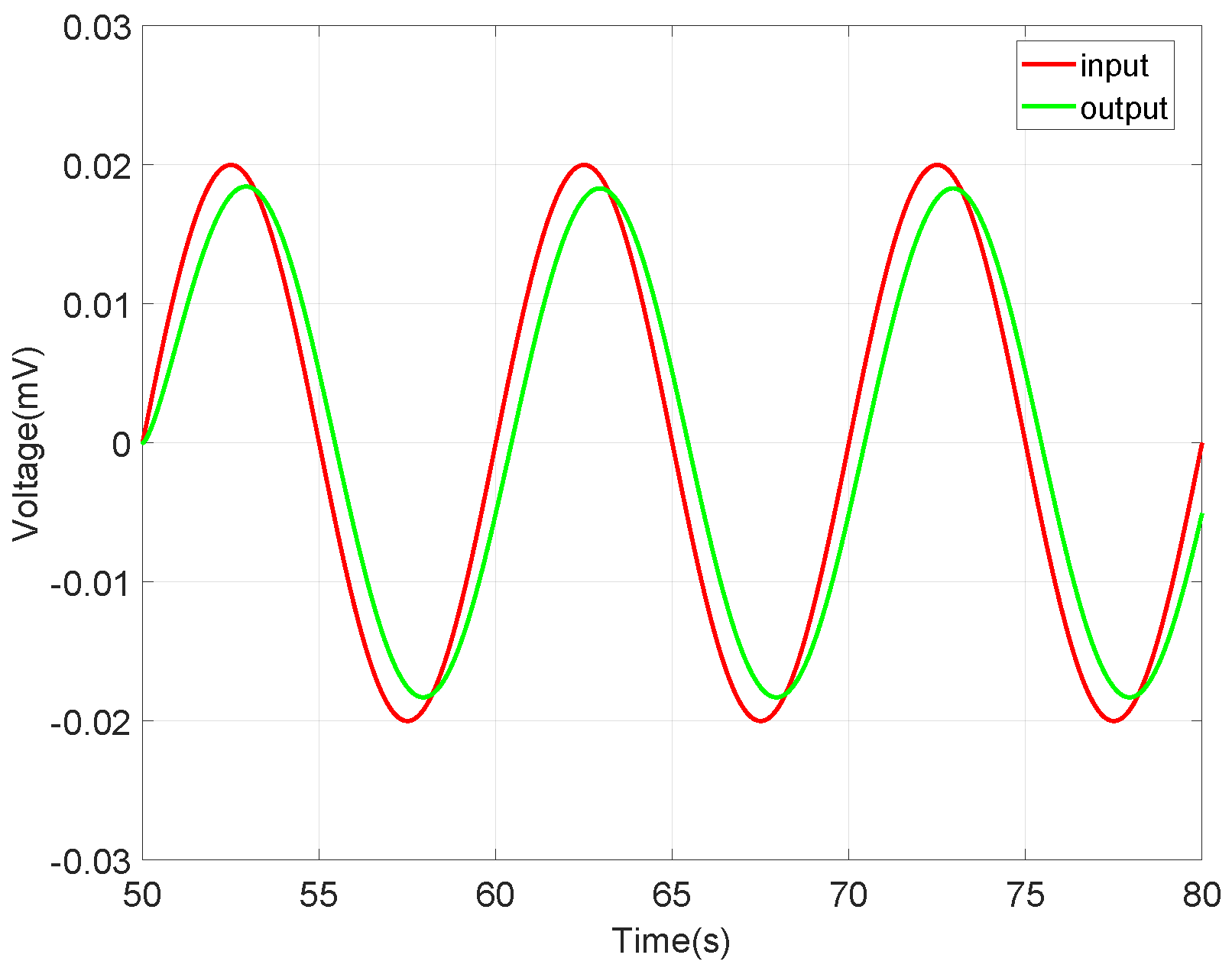
5.1. Results of Filters Derived from 1st-Order Mother Functions
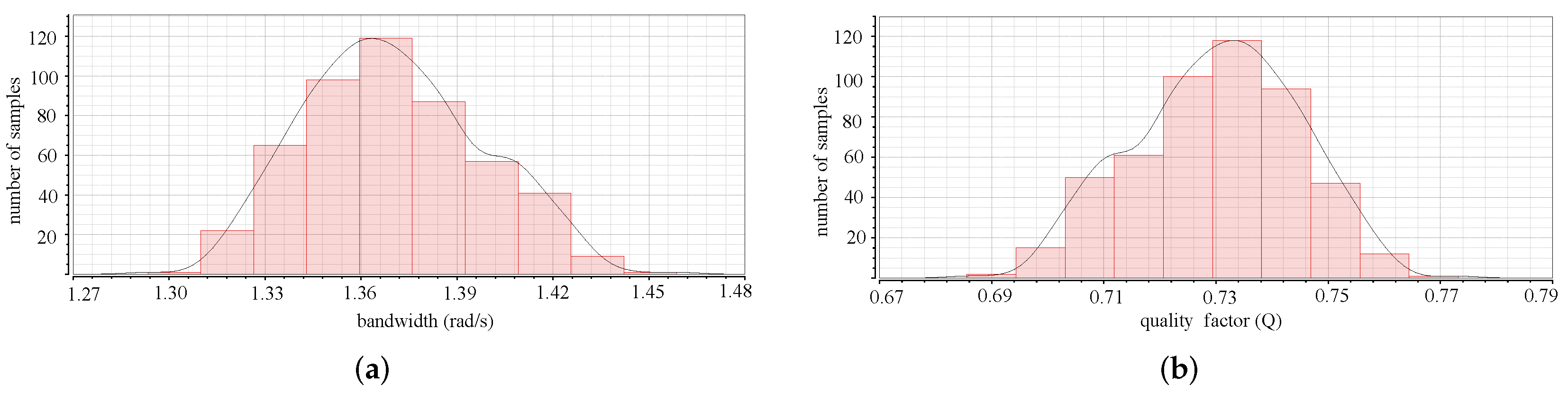
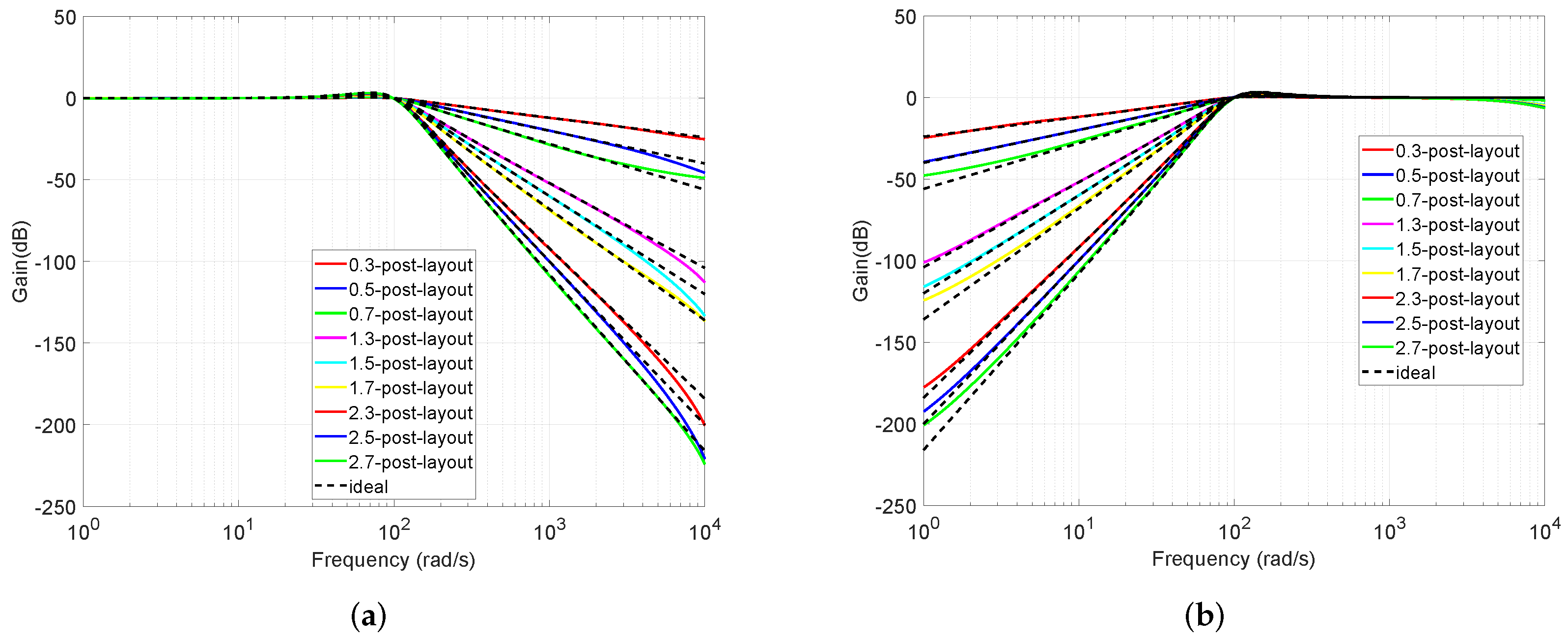
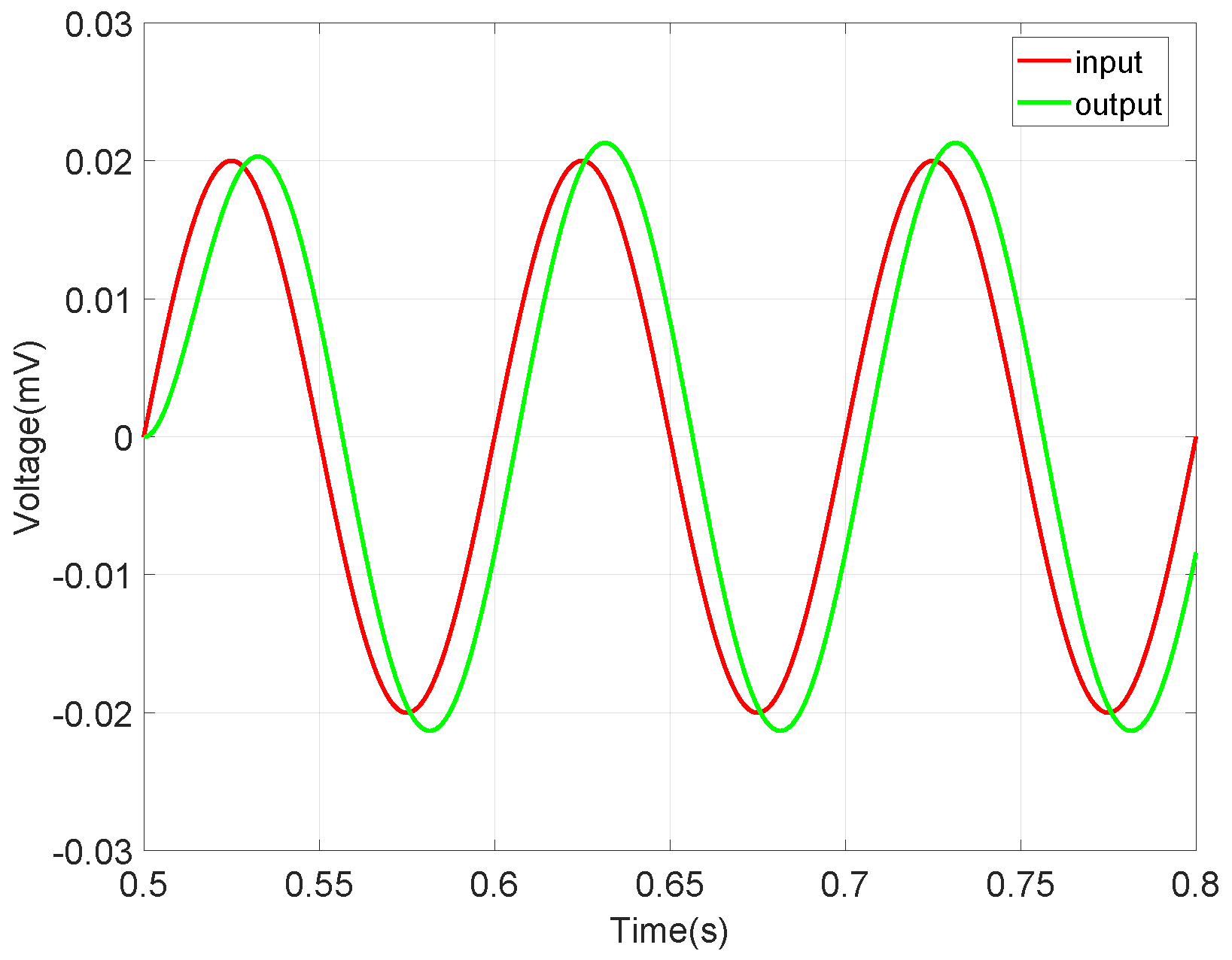
5.2. Results of Filters Derived from 2nd-Order Mother Functions
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| AMS | Austria Mikro Systeme |
| BP | Band-Pass |
| BS | Band-Stop |
| BW | Bandwidth |
| CFOA | Current Feedback Operational Amplifier |
| CMOS | Complementary Metal Oxide Semiconductor |
| DR | Dynamic Range |
| FO | Fractional-Order |
| FBD | Functional Block Diagram |
| FLF | Follow the Leader Feedback |
| HP | High-Pass |
| IC | Integrated Circuits |
| IFLF | Inverse Follow the Leader Feedback |
| LP | Low-Pass |
| MOS | Metal Oxide Semiconductor |
| OP-AMP | Operational Amplifier |
| OΤA | Operational Transconductance Amplifier |
| OTA-C | Operational Transconductance Amplifier-Capacitor |
| PL | Power-Law |
| Q factor | Quality factor |
| RMS | Root Mean Square |
| THD | Total Harmonic Distortion |
References
- Radwan, A.G.; Khanday, F.A.; Said, L.A. Fractional-Order Design: Devices, Circuits, and Systems; Elsevier: Amsterdam, The Netherlands, 2021. [Google Scholar]
- Mahata, S.; Saha, S.; Kar, R.; Mandal, D. Optimal integer-order rational approximation of α and α+ β fractional-order generalised analogue filters. IET Signal Process. 2019, 13, 516–527. [Google Scholar] [CrossRef]
- Mahata, S.; Kar, R.; Mandal, D. Optimal approximation of fractional-order systems with model validation using CFOA. IET Signal Process. 2019, 13, 787–797. [Google Scholar] [CrossRef]
- Mahata, S.; Kar, R.; Mandal, D. Optimal approximation of asymmetric type fractional-order bandpass Butterworth filter using decomposition technique. Int. J. Circuit Theory Appl. 2020, 48, 1554–1560. [Google Scholar] [CrossRef]
- Mahata, S.; Herencsar, N.; Kubanek, D. Optimal Approximation of Fractional-Order Butterworth Filter based on Weighted Sum of Classical Butterworth Filters. IEEE Access 2021, 9, 81097–81114. [Google Scholar] [CrossRef]
- Colín-Cervantes, J.D.; Sánchez-López, C.; Ochoa-Montiel, R.; Torres-Muñoz, D.; Hernández-Mejía, C.M.; Sánchez-Gaspariano, L.A.; González-Hernández, H.G. Rational Approximations of Arbitrary Order: A Survey. Fractal Fract. 2021, 5, 267. [Google Scholar] [CrossRef]
- Kapoulea, S.; Psychalinos, C.; Elwakil, A.S. Power law filters: A new class of fractional-order filters without a fractional-order Laplacian operator. AEU-Int. J. Electron. Commun. 2021, 129, 153537. [Google Scholar] [CrossRef]
- Agarwal, P.; Baleanu, D.; Chen, Y.; Momani, S.; Machado, J.A.T. Fractional Calculus. In Proceedings of the Conference ICFDA 2018, Amman, Jordan, 16–18 July 2018; Springer Nature Singapore Pte Ltd.: Singapore, 2018; p. 5. [Google Scholar]
- Kapoulea, S.; Yesil, A.; Psychalinos, C.; Minaei, S.; Elwakil, A.S.; Bertsias, P. Fractional-Order and Power-Law Shelving Filters: Analysis and Design Examples. IEEE Access 2021, 9, 145977–145987. [Google Scholar] [CrossRef]
- Kapoulea, S.; Psychalinos, C.; Elwakil, A.S.; Tavazoei, M.S. Power-Law Compensator Design for Plants with Uncertainties: Experimental Verification. Electronics 2021, 10, 1305. [Google Scholar] [CrossRef]
- Ozdemir, A.A.; Gumussoy, S. Transfer function estimation in system identification toolbox via vector fitting. IFAC-PapersOnLine 2017, 50, 6232–6237. [Google Scholar] [CrossRef]
- Bingi, K.; Ibrahim, R.; Karsiti, M.N.; Hassan, S.M.; Harindran, V.R. Fractional-Order Systems and PID Controllers; Springer Nature Switzerland AG: Cham, Switzerland, 2020. [Google Scholar]
- Mahata, S.; Herencsar, N.; Kubanek, D. On the Design of Power Law Filters and Their Inverse Counterparts. Fractal Fract. 2021, 5, 197. [Google Scholar] [CrossRef]
- Baxevanaki, K.; Kapoulea, S.; Psychalinos, C.; Elwakil, A.S. Electronically tunable fractional-order highpass filter for phantom electroencephalographic system model implementation. AEU-Int. J. Electron. Commun. 2019, 110, 152850. [Google Scholar] [CrossRef]
- Said, L.A.; Ismail, S.M.; Radwan, A.G.; Madian, A.H.; El-Yazeed, M.F.A.; Soliman, A.M. On the optimization of fractional order low-pass filters. Circuits, Syst. Signal Process. 2016, 35, 2017–2039. [Google Scholar] [CrossRef]
- Matsuda, K.; Fujii, H. H optimized wave-absorbing control—Analytical and experimental results. J. Guid. Control. Dyn. 1993, 16, 1146–1153. [Google Scholar] [CrossRef]
- Oustaloup, A.; Levron, F.; Mathieu, B.; Nanot, F.M. Frequency-band complex noninteger differentiator: Characterization and synthesis. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 2000, 47, 25–39. [Google Scholar] [CrossRef]
- Krishna, B.T. Studies on fractional order differentiators and integrators: A survey. Signal Process. 2011, 91, 386–426. [Google Scholar] [CrossRef]
- El-Khazali, R. On the biquadratic approximation of fractional-order Laplacian operators. Analog Integr. Circuits Signal Process. 2015, 82, 503–517. [Google Scholar] [CrossRef]
- Koseoglu, M.; Deniz, F.N.; Alagoz, B.B.; Alisoy, H. An effective analog circuit design of approximate fractional-order derivative models of M-SBL fitting method. Eng. Sci. Technol. Int. J. 2021, 33, 101069. [Google Scholar] [CrossRef]
- Lorentzen, L. Padé approximation and continued fractions. Appl. Numer. Math. 2010, 60, 1364–1370. [Google Scholar] [CrossRef]
- Barbé, K. Measurement of Cole–Davidson diffusion through Padé approximations for (bio) impedance spectroscopy. IEEE Trans. Instrum. Meas. 2019, 69, 301–310. [Google Scholar] [CrossRef]
- Brezinski, C. History of Continued Fractions and Padé Approximants; Springer: Berlin/Heidelberg, Germany, 2012; Volume 12. [Google Scholar]
- Sánchez-Gaspariano, L.A.; Muñiz-Montero, C.; Muñoz-Pacheco, J.M.; Sánchez-López, C.; Gómez-Pavón, L.d.C.; Luis-Ramos, A.; Bautista-Castillo, A.I. CMOS analog filter design for very high frequency applications. Electronics 2020, 9, 362. [Google Scholar] [CrossRef] [Green Version]
- Mohan, P.A. VLSI Analog Filters: Active RC, OTA-C, and SC; Springer Science & Business Media: New York, NY, USA, 2012. [Google Scholar]
- Corbishley, P.; Rodriguez-Villegas, E. A nanopower bandpass filter for detection of an acoustic signal in a wearable breathing detector. IEEE Trans. Biomed. Circuits Syst. 2007, 1, 163–171. [Google Scholar] [CrossRef] [PubMed]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
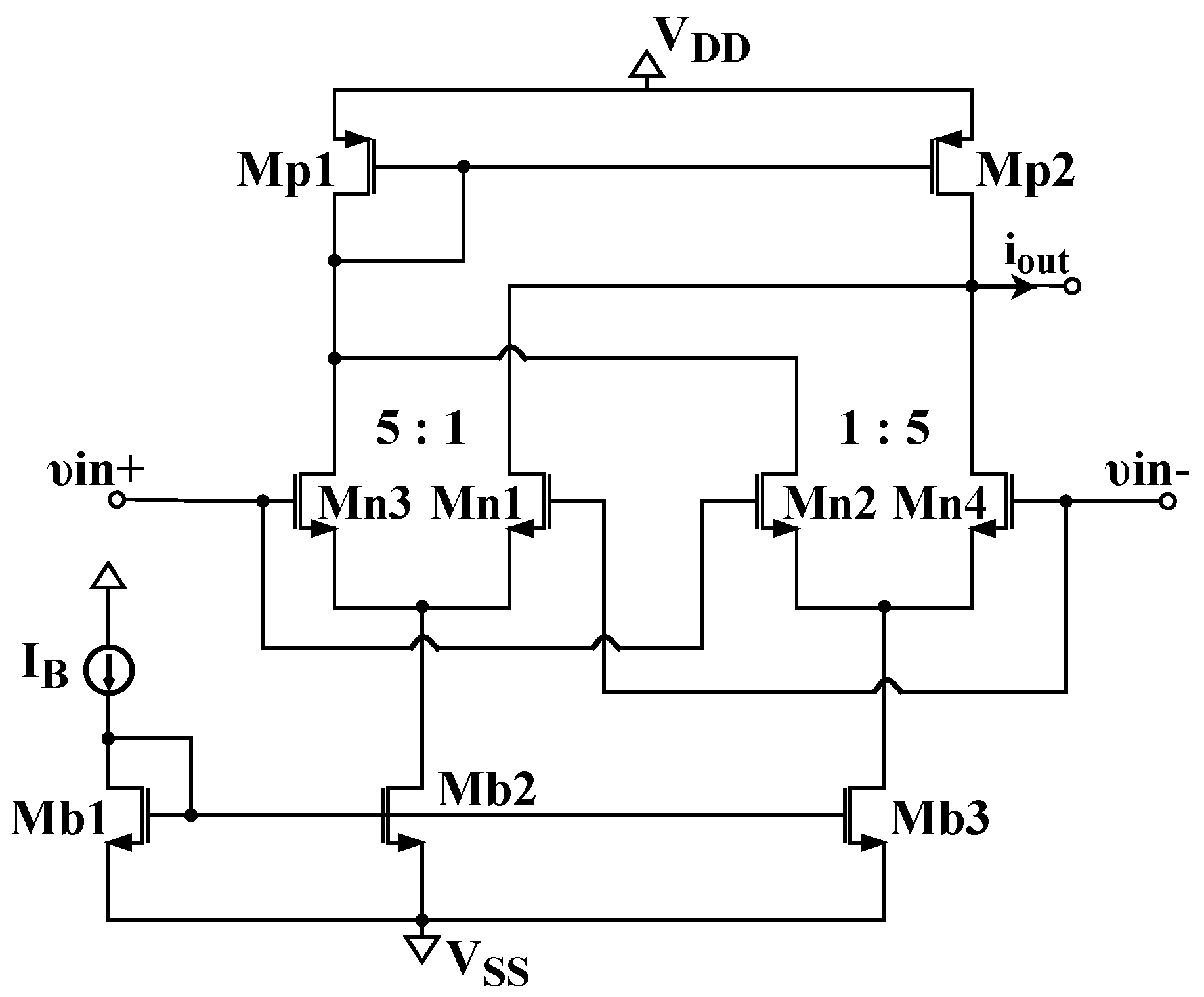
| Transistors | Aspect Ratio |
|---|---|
| Mb1–Mb3 | 4.4 m/5 m |
| Mp1–Mp2 | 0.5 m/1.5 m |
| Mn1–Mn2 | 1.1 m/1.5 m |
| Mn3–Mn4 | 5.5 m/1.5 m |
| Parameter | LP Filter | HP Filter | ||||
|---|---|---|---|---|---|---|
| 0.3 | 0.5 | 0.7 | 0.3 | 0.5 | 0.7 | |
| 1 | 1 | 1 | 0.1568 | 0.0438 | 0.0106 | |
| 0.7621 | 0.6442 | 0.5492 | 0.3273 | 0.1605 | 0.08 | |
| 0.5308 | 0.3577 | 0.2454 | 0.5308 | 0.3577 | 0.2454 | |
| 0.3273 | 0.1605 | 0.08 | 0.7621 | 0.6442 | 0.5492 | |
| 0.1568 | 0.0438 | 0.0106 | 1 | 1 | 1 | |
| (nS) | 6.65 | 23.82 | 98.46 | 1.04 | 1.04 | 1.04 |
| (nS) | 3.19 | 6.5 | 13.04 | 1.37 | 1.62 | 1.9 |
| (nS) | 1.97 | 2.92 | 4.25 | 1.97 | 2.92 | 4.25 |
| (nS) | 1.37 | 1.62 | 1.9 | 3.19 | 6.5 | 13.04 |
| (nS) | 1.04 | 1.04 | 1.04 | 6.65 | 23.82 | 98.46 |
| Order | LP Filter | HP Filter | LP Filter | HP Filter |
|---|---|---|---|---|
| (rad/s) | phase@ (°) | |||
| 0.3 | 2.99 (3.01) | 0.30 (0.33) | −21.41 (−21.49) | 21.46 (21.49) |
| 0.5 | 1.73 (1.73) | 0.54 (0.58) | −29.84 (−30) | 29.66 (30) |
| 0.7 | 1.3 (1.3) | 0.73 (0.77) | −36.2 (−36.71) | 36.1 (36.71) |
| 1.3 | 0.84 (0.84) | 1.18 (1.19) | −51.88 (−52.01) | 51.36 (52.01) |
| 1.5 | 0.77 (0.77) | 1.29 (1.3) | −56.06 (−56.2) | 55.5 (56.2) |
| 1.7 | 0.71 (0.71) | 1.4 (1.41) | −59.96 (−60.11) | 59.32 (60.11) |
| 2.3 | 0.59 (0.59) | 1.68 (1.69) | −70.42 (−70.5) | 69.78 (70.5) |
| 2.5 | 0.57 (0.57) | 1.76 (1.77) | −73.6 (−73.7) | 72.87 (73.7) |
| 2.7 | 0.54 (0.54) | 1.84 (1.85) | −76.6 (−76.7) | 75.82 (76.7) |
| Parameter | LP Filter | HP Filter | ||||
|---|---|---|---|---|---|---|
| 0.3 | 0.5 | 0.7 | 0.3 | 0.5 | 0.7 | |
| 1 | 1 | 1 | 0.0326 | 1.59 × 10—5 | −0.0021 | |
| 0.8067 | 0.8219 | 0.7033 | 0.1945 | 0.3303 | 0.0327 | |
| 0.5648 | 0.5927 | 0.3162 | 0.5648 | 0.5927 | 0.3162 | |
| 0.1945 | 0.3303 | 0.0327 | 0.8067 | 0.8219 | 0.7033 | |
| 0.0326 | 1.59 × 10—5 | −0.0021 | 1 | 1 | 1 | |
| (nS) | 32.05 | 65638 | 503.88 | 1.04 | 1.04 | 1.04 |
| (nS) | 5.36 | 3.16 | 31.88 | 1.29 | 1.27 | 1.48 |
| (nS) | 1.85 | 1.76 | 3.3 | 1.85 | 1.76 | 3.3 |
| (nS) | 1.29 | 1.27 | 1.48 | 5.36 | 3.16 | 31.88 |
| (nS) | 1.04 | 1.04 | 1.04 | 32.05 | 65638 | 503.88 |
| Parameter | BP Filter | BS Filter | ||||
|---|---|---|---|---|---|---|
| 0.3 | 0.5 | 0.7 | 0.3 | 0.5 | 0.7 | |
| 0.2162 | 0.0769 | 0.0241 | 0.9998 | 0.9998 | 0.9999 | |
| 0.5275 | 0.3636 | 0.2584 | 0.6366 | 0.4811 | 0.3658 | |
| 0.95 | 0.9063 | 0.8462 | 0.9716 | 0.9466 | 0.9166 | |
| 0.5275 | 0.3636 | 0.2584 | 0.6366 | 0.4811 | 0.3658 | |
| 0.2162 | 0.0769 | 0.0241 | 0.9998 | 0.9998 | 0.9999 | |
| (nS) | 4.83 | 13.57 | 43.24 | 1.04 | 1.04 | 1.04 |
| (nS) | 1.98 | 2.87 | 4.04 | 1.64 | 2.17 | 2.85 |
| (nS) | 1.1 | 1.15 | 1.23 | 1.85 | 1.1 | 1.14 |
| (nS) | 1.98 | 2.87 | 4.04 | 1.64 | 2.17 | 2.85 |
| (nS) | 4.83 | 13.57 | 43.24 | 1.04 | 1.04 | 1.04 |
| Order | LP Filter | HP Filter | LP Filter | HP Filter |
|---|---|---|---|---|
| (rad/s) | phase@ () | |||
| 0.3 | 185 (189) | 52 (53) | −42.86 (−43.07) | 42.12 (43.07) |
| 0.5 | 153 (152) | 65 (66) | −65.9 (−65.32) | 65.39 (65.32) |
| 0.7 | 137 (138) | 73 (74) | −86.39 (−86.11) | 81.1 (86.11) |
| 1.3 | 121 (121) | 82 (82) | −144.5 (−144.4) | 142.3 (144.4) |
| 1.5 | 119 (118) | 83 (83) | −163.5 (−163) | 162.3 (163) |
| 1.7 | 116 (118) | 86 (85) | −182.3 (−183.5) | 175.8 (183.5) |
| 2.3 | 112 (115) | 88 (88) | −237.3 (−241.7) | 233.9 (241.7) |
| 2.5 | 111 (111) | 89 (89) | −255.7 (−255.5) | 253.4 (255.5) |
| 2.7 | 110 (107) | 90 (90) | −272.8 (−267.6) | 266.22 (267.6) |
| Order | BP Filter | BS Filter | BP Filter | BS Filter | BP Filter | BS Filter |
|---|---|---|---|---|---|---|
| (rad/s) | Bandwidth (rad/s) | Q Factor (rad/s) | ||||
| 0.3 | 0.99 (1) | 0.97 (1) | 3.03 (3.03) | 0.34 (0.33) | 0.33 (0.33) | 2.94 (3.01) |
| 0.5 | 0.99 (1) | 0.97 (1) | 1.82 (1.74) | 0.63 (0.58) | 0.55 (0.57) | 1.59 (1.73) |
| 0.7 | 0.99 (1) | 0.97 (1) | 1.37 (1.31) | 0.81 (0.77) | 0.73 (0.76) | 1.23 (1.3) |
| 1.3 | 1 (1) | 1 (1) | 0.89 (0.84) | 1.3 (1.19) | 1.12 (1.19) | 0.77 (0.84) |
| 1.5 | 1 (1) | 0.99 (1) | 0.81 (0.77) | 1.42 (1.31) | 1.23 (1.3) | 0.7 (0.76) |
| 1.7 | 1 (1) | 0.99 (1) | 0.74 (0.71) | 1.52 (1.41) | 1.35 (1.41) | 0.66 (0.71) |
| 2.3 | 1 (1) | 1 (1) | 0.62 (0.59) | 1.88 (1.69) | 1.61 (1.69) | 0.53 (0.59) |
| 2.5 | 1 (1) | 1 (1) | 0.59 (0.56) | 1.98 (1.77) | 1.69 (1.78) | 0.51 (0.56) |
| 2.7 | 1 (1) | 1 (1) | 0.56 (0.54) | 2.06 (1.85) | 1.79 (1.85) | 0.49 (0.54) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tsouvalas, E.; Kapoulea, S.; Psychalinos, C.; Elwakil, A.S.; Jurišić, D. Electronically Controlled Power-Law Filters Realizations. Fractal Fract. 2022, 6, 111. https://doi.org/10.3390/fractalfract6020111
Tsouvalas E, Kapoulea S, Psychalinos C, Elwakil AS, Jurišić D. Electronically Controlled Power-Law Filters Realizations. Fractal and Fractional. 2022; 6(2):111. https://doi.org/10.3390/fractalfract6020111
Chicago/Turabian StyleTsouvalas, Errikos, Stavroula Kapoulea, Costas Psychalinos, Ahmed S. Elwakil, and Dražen Jurišić. 2022. "Electronically Controlled Power-Law Filters Realizations" Fractal and Fractional 6, no. 2: 111. https://doi.org/10.3390/fractalfract6020111
APA StyleTsouvalas, E., Kapoulea, S., Psychalinos, C., Elwakil, A. S., & Jurišić, D. (2022). Electronically Controlled Power-Law Filters Realizations. Fractal and Fractional, 6(2), 111. https://doi.org/10.3390/fractalfract6020111