
Recent Advances and Applications of Spiral Dynamics Optimization Algorithm: A Review




Abstract
1. Introduction
- The algorithms are easy to implement and do not require gradient information as they depend on relatively simple concepts;
- The algorithms can avoid settling at optimal local solutions;
- The algorithms can be applied to various problems of different fields.
2. Spiral Dynamics Optimization Algorithm
2.1. Origin
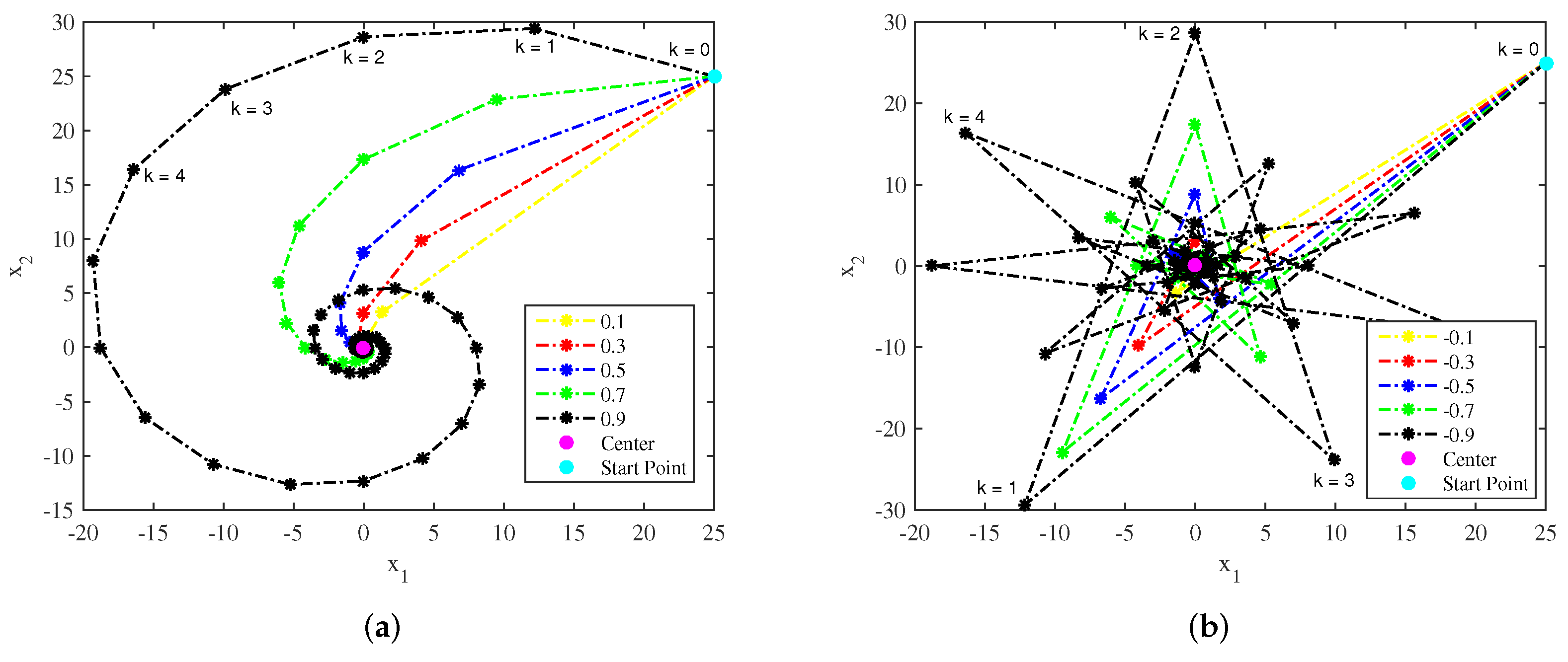
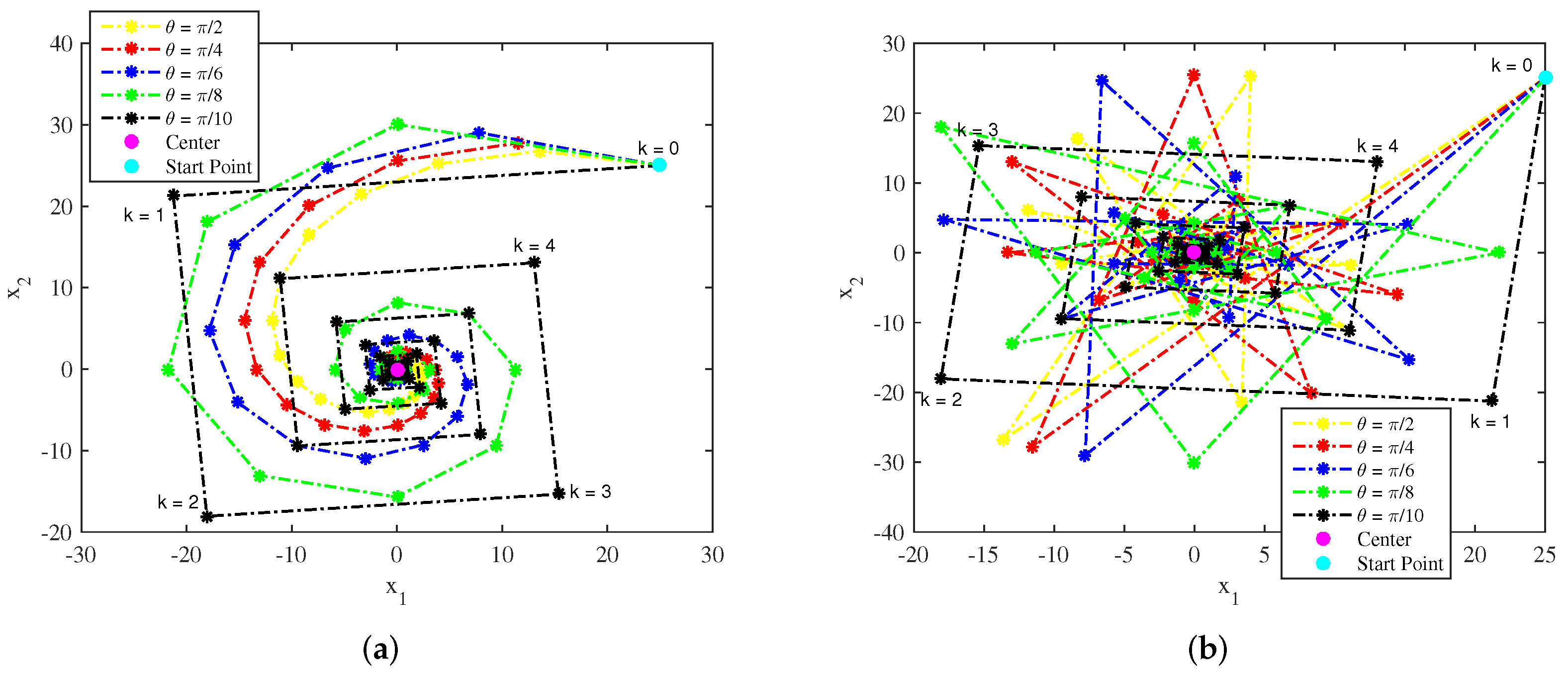
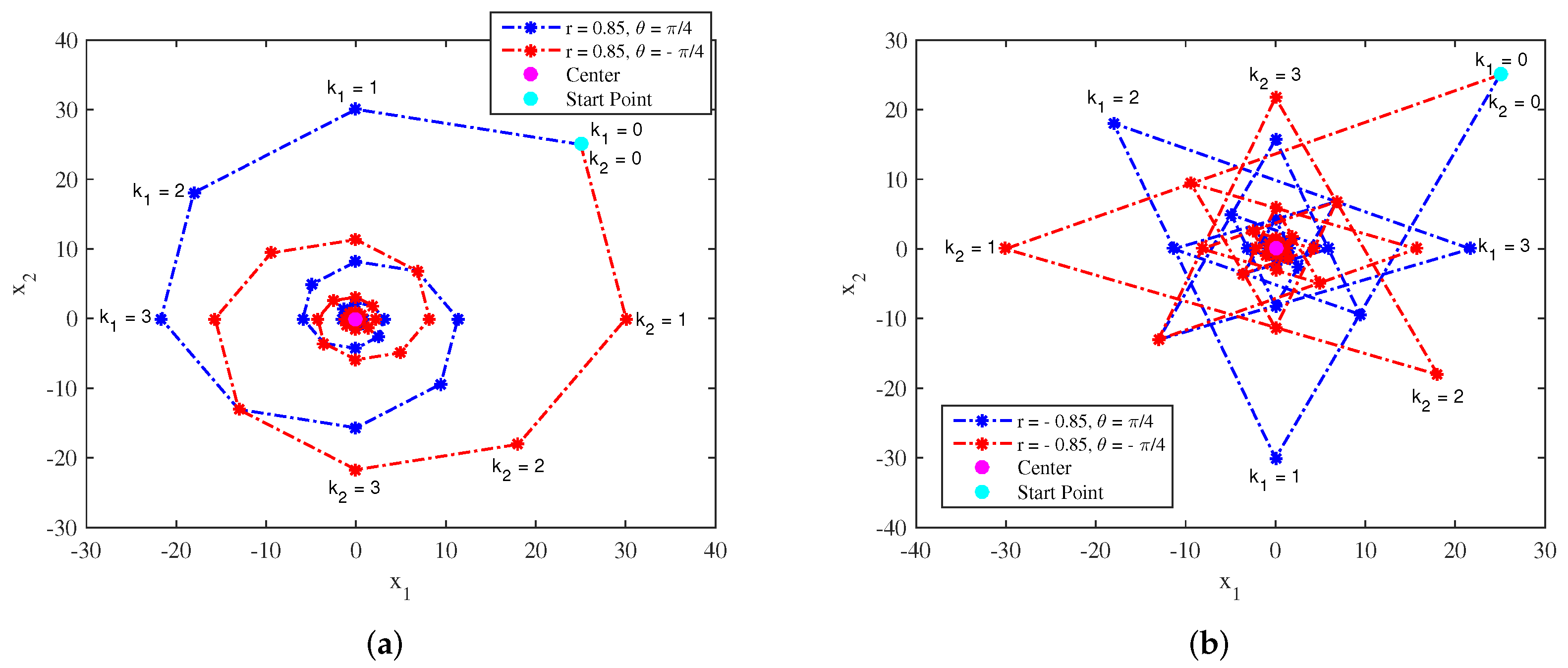
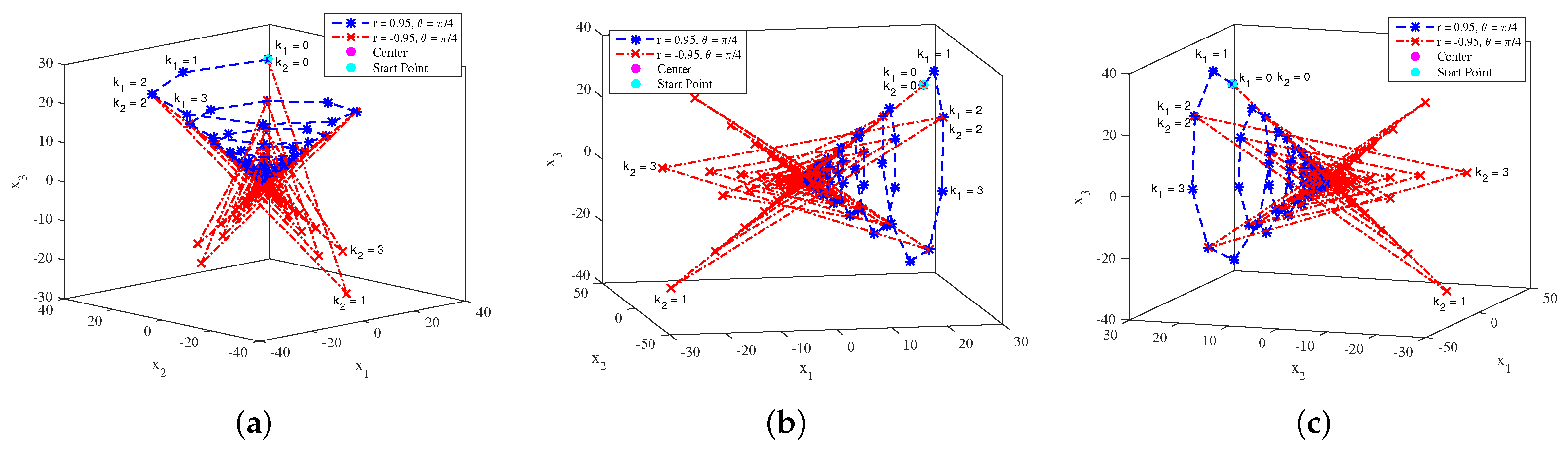
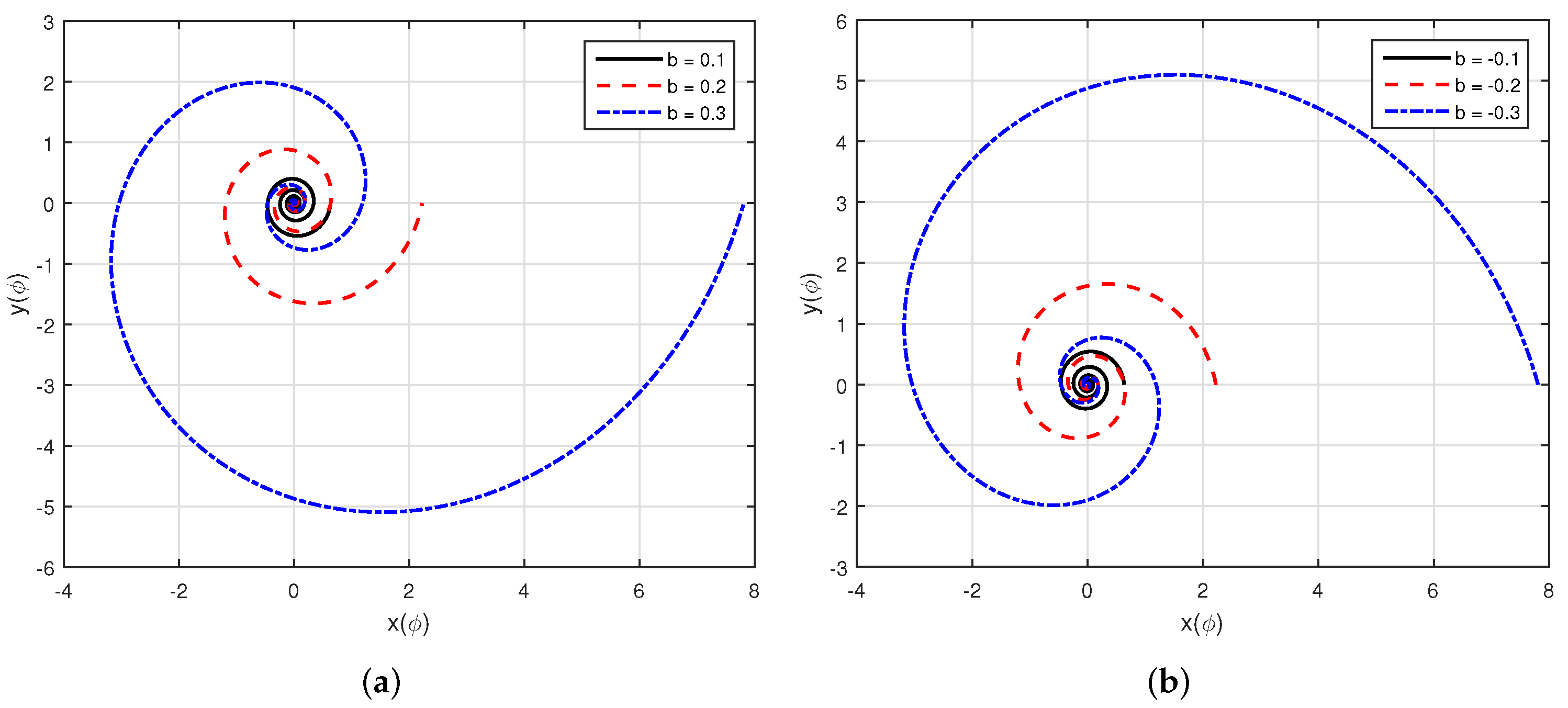
2.2. Concept
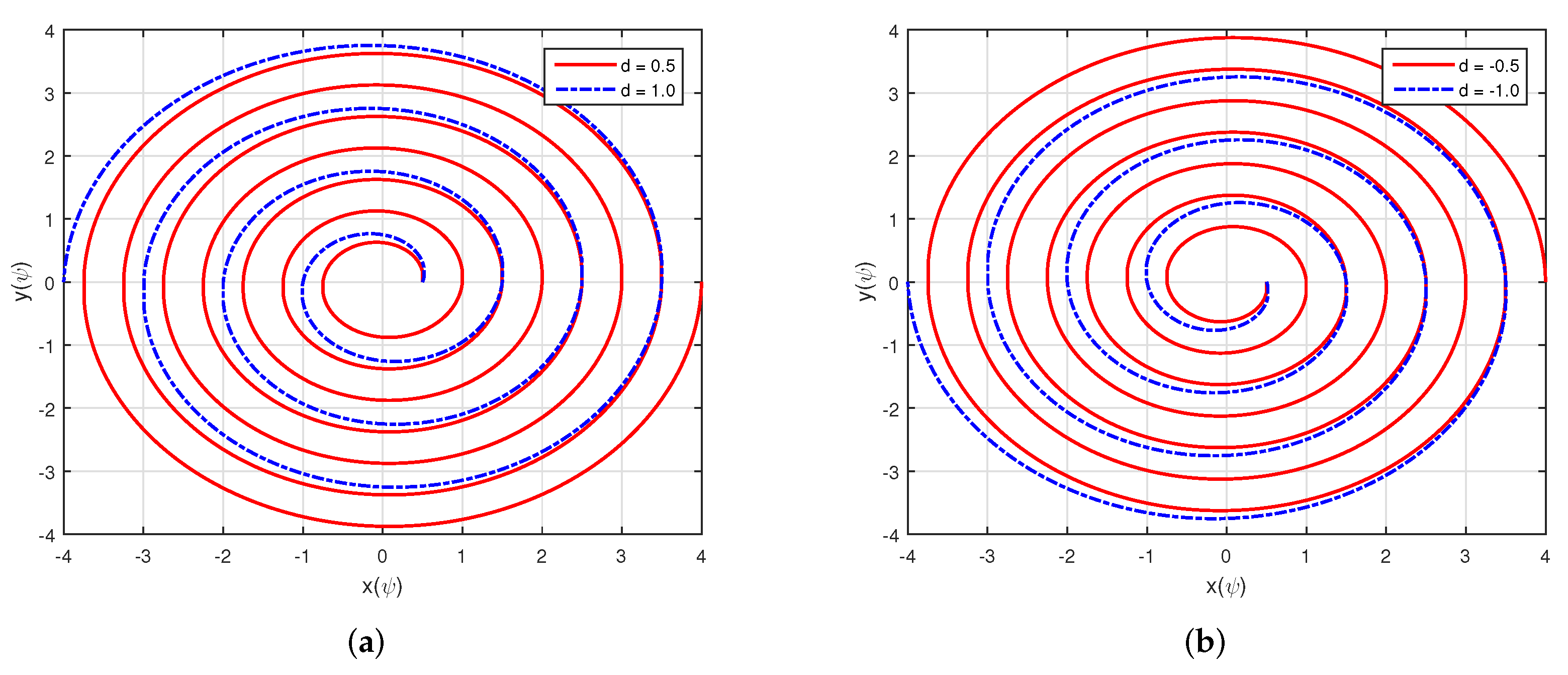
- If and , the trajectory is a conventional spiral;
- If and , the trajectory is a hypotrochoid spiral.
- If , the rotation of trajectory is clockwise;
- If , the rotation of trajectory is anticlockwise.
3. Advances of Spiral Dynamics Optimization Algorithm
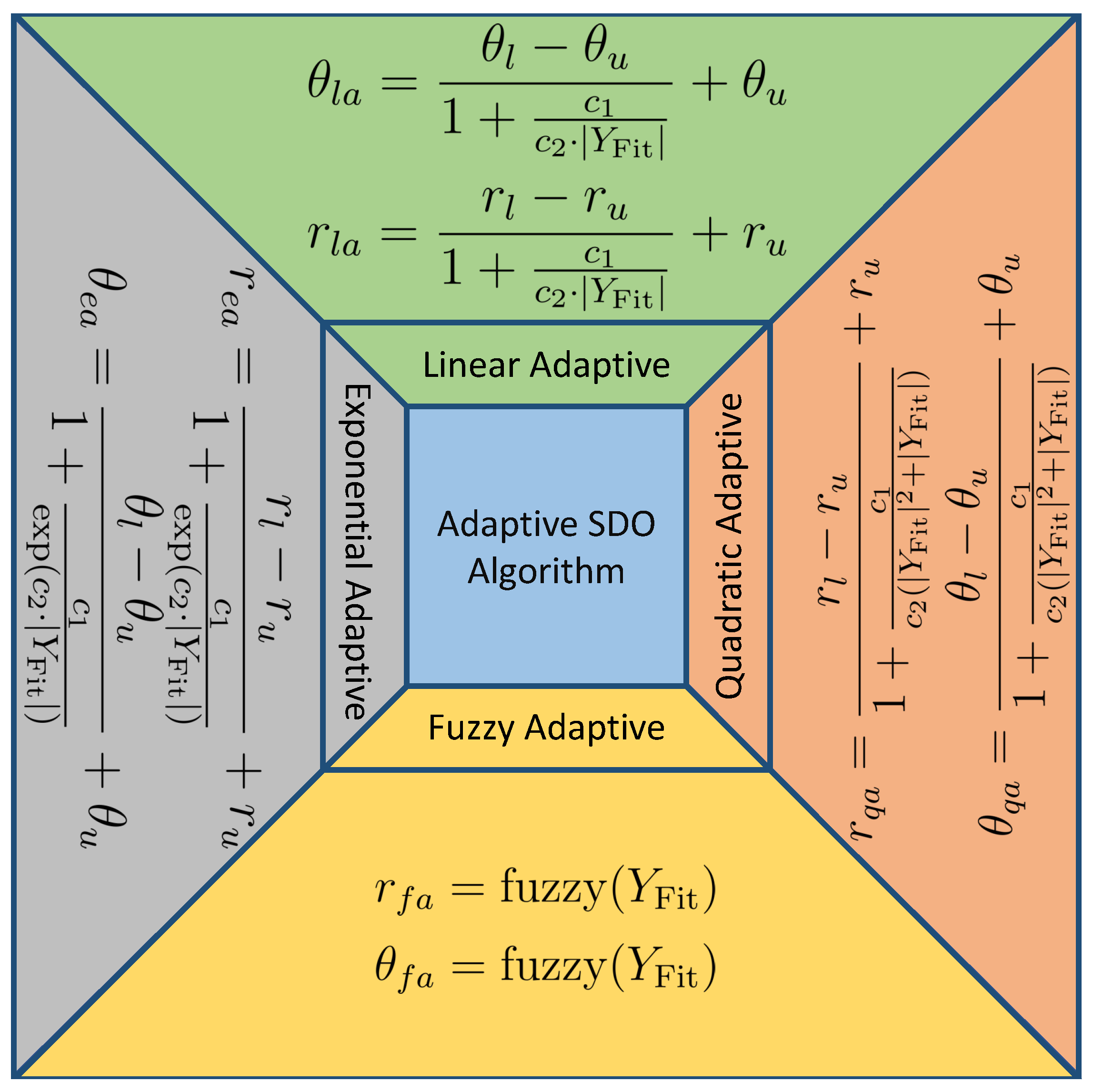
3.1. Adaptive Versions of Spiral Dynamics Optimization Algorithm
- and are the computed radius and angle using linear adaptive approach;
- and are the obtained radius and angle using quadratic adaptive approach;
- and are the radius and angle obtained using exponential adaptive approach;
- and are the calculated radius and angle using fuzzy adaptive approach;
- and are the minimum and maximum radius of spiral;
- and are the minimum and maximum angles of spiral;
- and are constants;
- is the fuzzy logic mapping;
- is the difference between fitness value at a current iteration and best fitness , is defined as,
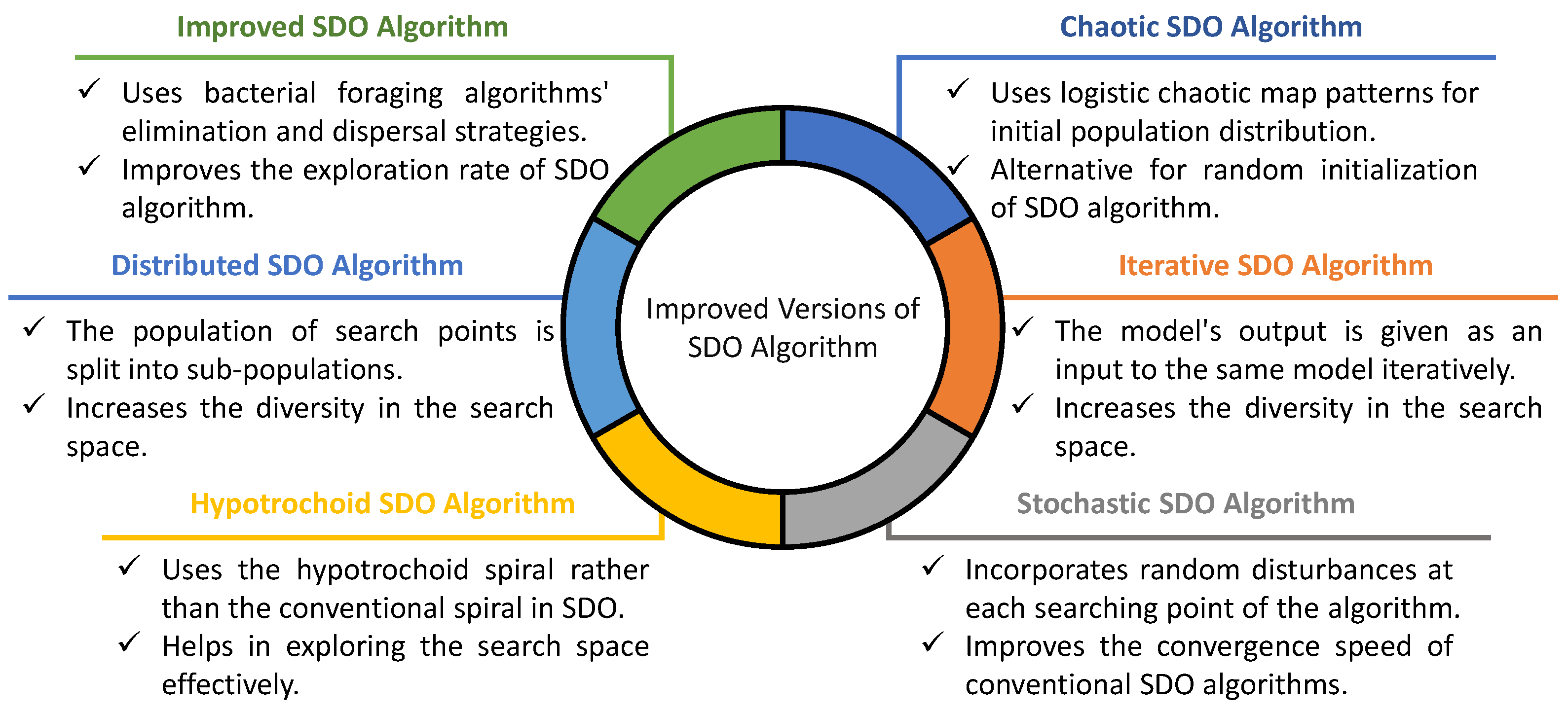
3.2. Improved Versions of Spiral Dynamics Optimization Algorithm
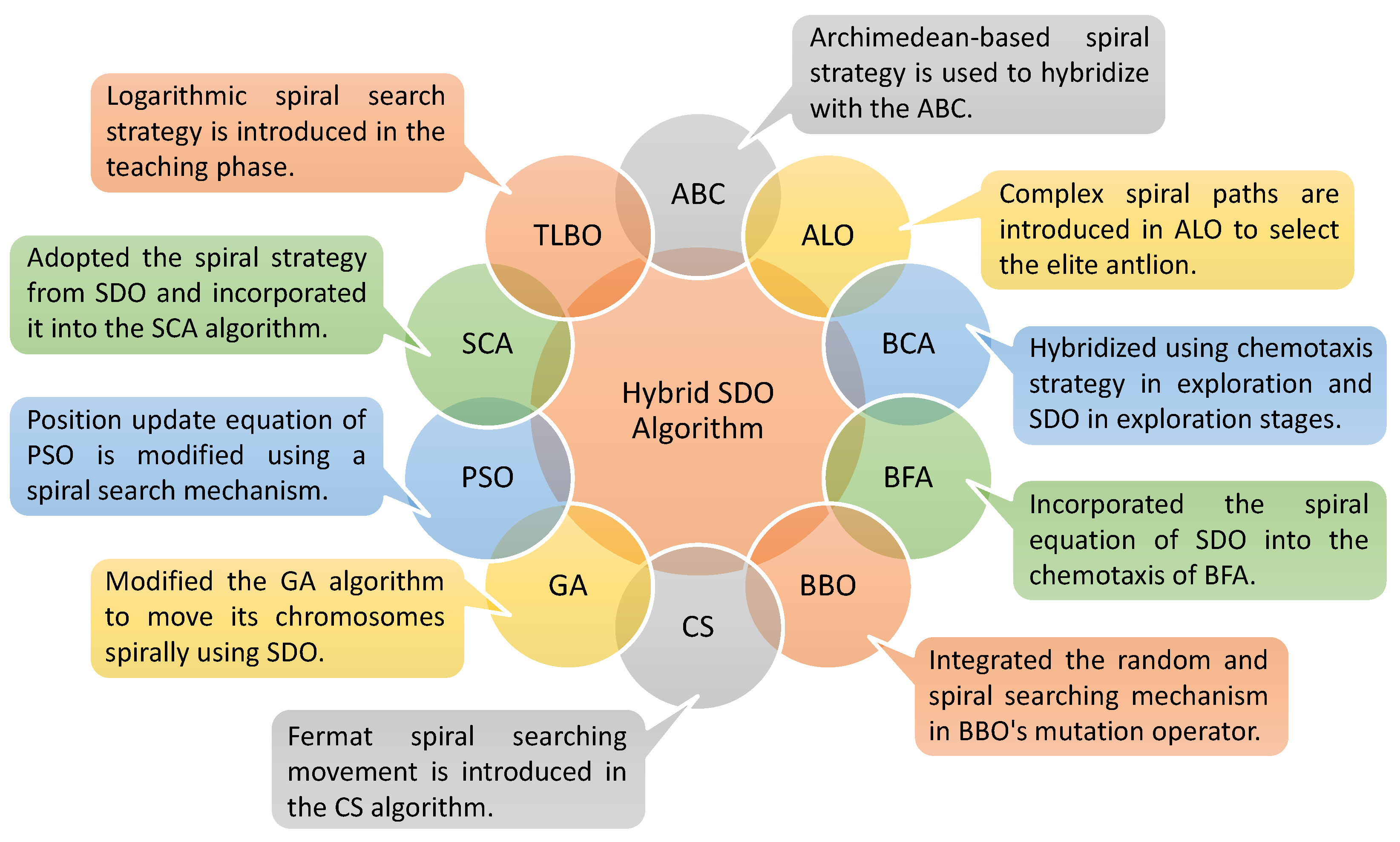
3.3. Hybrid Versions of Spiral Dynamics Optimization Algorithm
4. Spiral Path Inspired Optimization Algorithms
4.1. Spiral Paths
- Archimedes spira;
- Cycloid spiral;
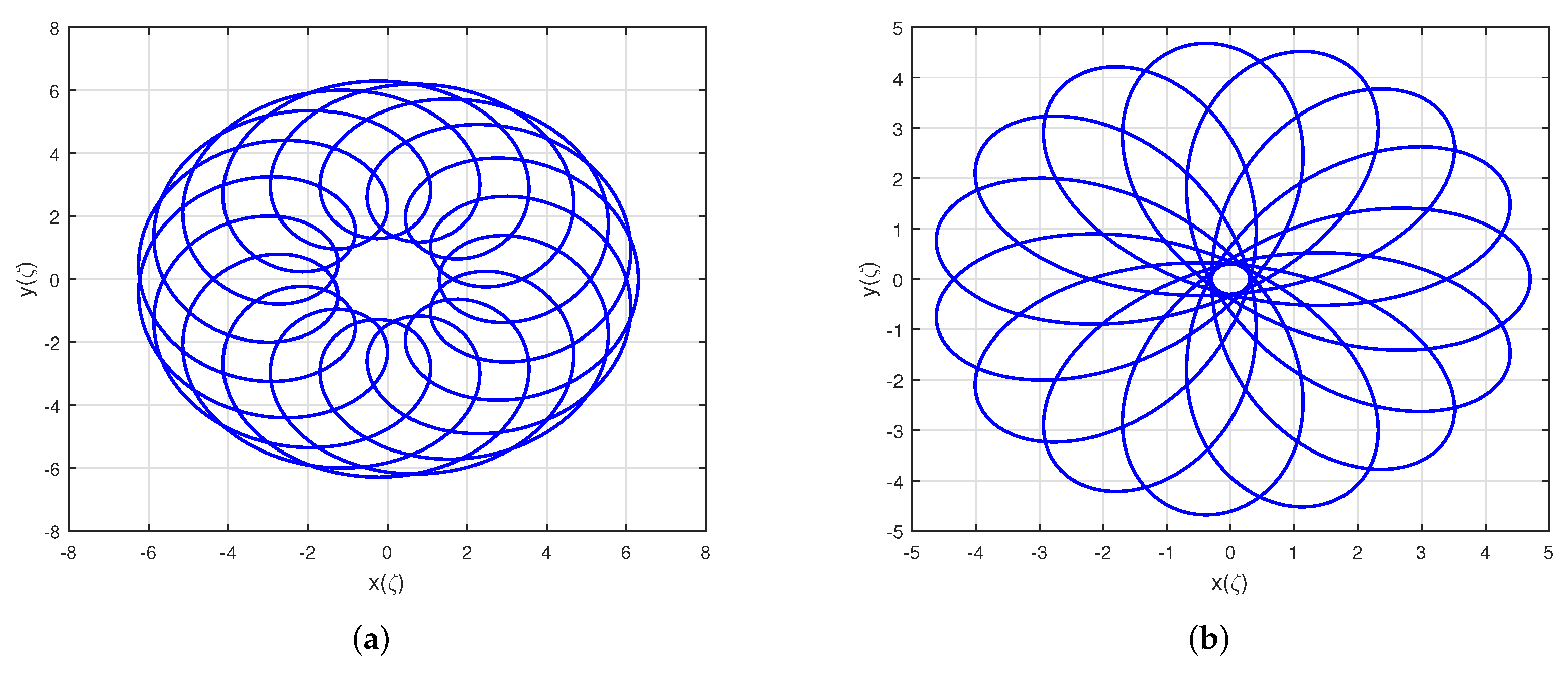
- Epitrochoid spiral;
- Hypotrochoid spiral;
- Logarithmic spiral;
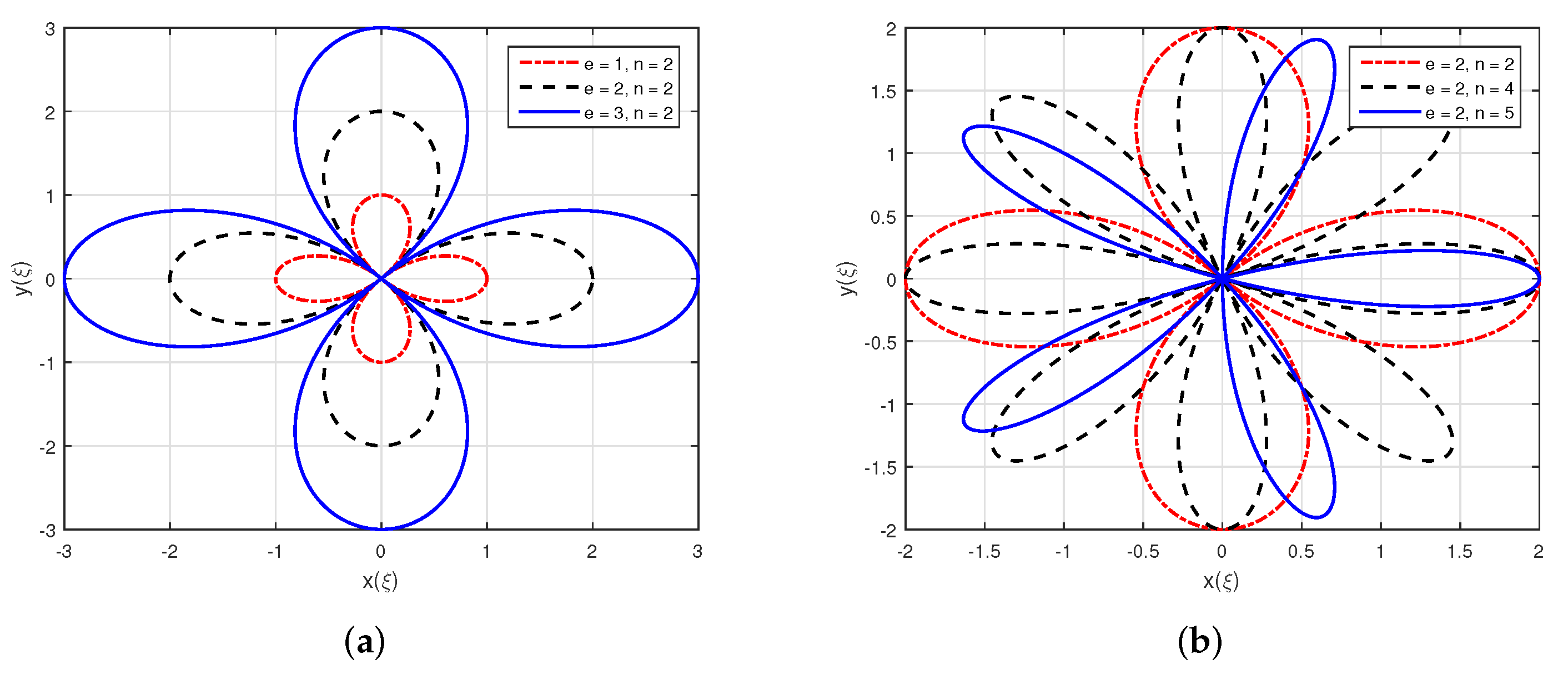
- Rose spiral;
- Inverse spiral; and
- Overshoot spirals.
4.1.1. Logarithmic Spiral
4.1.2. Archimedean Spiral
4.1.3. Rose Spiral
4.1.4. Epitrochoid and Hypotrochoid Spirals
4.2. Spiral Path-Based Optimization Algorithms
4.2.1. Moth–Flame Optimization Algorithm
4.2.2. Whale Optimization Algorithm
4.2.3. Seagull Optimization Algorithm
4.2.4. Aquila Optimization Algorithm
4.2.5. Water Cycle Optimization Algorithm
4.2.6. Ant Lion Optimization Algorithm
4.2.7. Slap Swarm Optimization Algorithm
4.2.8. Sparrow Search Optimization Algorithm
5. Application of Spiral Dynamics Optimization Algorithm
5.1. Modeling and Controller Tuning
5.2. Electrical Energy Optimization
5.3. Mechanical Systems Optimization
5.4. Other Optimization Problems
6. Conclusions
6.1. Findings
6.2. Future Perspectives
- Even though the authors have tried to avoid the issue of settling at local optima by the SDO algorithm, the issue is persisting. It requires a careful balance between exploration and exploitation phases.
- The problem of insufficient search space exploration with the conventional SDO, which uses a logarithmic spiral, can be overcome by judiciously selecting spirals. A few such spirals are Fermat, Archimedean, etc., which seem suitable in the present context to solve multiobjective problems. Specifically, the use of Fibonacci and a golden spiral is expected to solve image processing optimization problems effectively as their spiral behavior helps analyze the entire image.
- Dynamically varying control parameters in each iteration of SDO variants is still unresolved, leading to lower accuracy of the optimal solution. The selection of suitable adaptive functions for control parameters is required.
- There is a scope to improve the performance of several existing spiral-inspired optimization algorithms either by utilizing the spiral position update equation of SDO or using other spiral trajectories. Further, the natural behavior of nonspiral-inspired algorithms can be modified using spiral paths for better accuracy in the optimal solution.
- The lack of a mathematical model for complex spiral trajectories, such as the Celtic spiral, limits its use for better search space exploration. Hence, the development of suitable models for such a complex spiral trajectory is expected to enhance the SDO algorithm’s exploration performance.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Abdel-Basset, M.; Abdel-Fatah, L.; Sangaiah, A.K. Metaheuristic algorithms: A comprehensive review. In Computational Intelligence for Multimedia Big Data on the Cloud with Engineering Applications; Academic Press: Cambridge, MA, USA, 2018; pp. 185–231. [Google Scholar]
- Molina, D.; Poyatos, J.; Del Ser, J.; García, S.; Hussain, A.; Herrera, F. Comprehensive taxonomies of nature-and bio-inspired optimization: Inspiration versus algorithmic behavior, critical analysis recommendations. Cogn. Comput. 2020, 12, 897–939. [Google Scholar] [CrossRef]
- Biswas, A.; Mishra, K.; Tiwari, S.; Misra, A. Physics-inspired optimization algorithms: A survey. J. Optim. 2013, 2013, 438152. [Google Scholar] [CrossRef]
- Siddique, N.; Adeli, H. Physics-based search and optimization: Inspirations from nature. Expert Syst. 2016, 33, 607–623. [Google Scholar] [CrossRef]
- Lindfield, G.; Penny, J. (Eds.) Chapter 8—Physics Inspired Optimization Algorithms. In Introduction to Nature-Inspired Optimization; Academic Press: Boston, UK, 2017; pp. 141–170. [Google Scholar] [CrossRef]
- Siddique, N.; Adeli, H. Nature-Inspired Computing: Physics-and Chemistry-Based Algorithms; Chapman and Hall/CRC: Boca Raton, FL, USA, 2017. [Google Scholar]
- Abedinpourshotorban, H.; Shamsuddin, S.M.; Beheshti, Z.; Jawawi, D.N. Electromagnetic field optimization: A physics-inspired metaheuristic optimization algorithm. Swarm Evol. Comput. 2016, 26, 8–22. [Google Scholar] [CrossRef]
- Shah-Hosseini, H. Principal components analysis by the galaxy-based search algorithm: A novel metaheuristic for continuous optimisation. Int. J. Comput. Sci. Eng. 2011, 6, 132–140. [Google Scholar]
- Tamura, K.; Yasuda, K. Primary study of spiral dynamics inspired optimization. IEEJ Trans. Electr. Electron. Eng. 2011, 6, S98–S100. [Google Scholar] [CrossRef]
- Eskandar, H.; Sadollah, A.; Bahreininejad, A.; Hamdi, M. Water cycle algorithm—A novel metaheuristic optimization method for solving constrained engineering optimization problems. Comput. Struct. 2012, 110, 151–166. [Google Scholar] [CrossRef]
- Tamura, K.; Yasuda, K. Spiral multipoint search for global optimization. In Proceedings of the 2011 10th International Conference on Machine Learning and Applications and Workshops, Honolulu, HI, USA, 18–21 December 2011; Volume 1, pp. 470–475. [Google Scholar]
- Tsuji, K.; Müller, S.C. Spirals and Vortices: In Culture, Nature, and Science; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- Hammer, Ø. The Perfect Shape: Spiral Stories; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Siddique, N.; Adeli, H. Spiral dynamics algorithm. Int. J. Artif. Intell. Tools 2014, 23, 1430001. [Google Scholar] [CrossRef]
- Tamura, K.; Yasuda, K. The spiral optimization algorithm: Convergence conditions and settings. IEEE Trans. Syst. Man Cybern. Syst. 2017, 50, 360–375. [Google Scholar] [CrossRef]
- Nasir, A.; Ismail, R.R.; Tokhi, M. Adaptive spiral dynamics metaheuristic algorithm for global optimisation with application to modelling of a flexible system. Appl. Math. Model. 2016, 40, 5442–5461. [Google Scholar] [CrossRef][Green Version]
- Abishek, R.; Maiti, M.; Sunder, M.; Bingi, K.; Puri, H. Adaptation of Spiral Radius and Angle in Hypotrochoid Spiral Dynamic Algorithm. In Proceedings of the 2021 IEEE Madras Section Conference (MASCON), Chennai, India, 27–28 August 2021; pp. 1–6. [Google Scholar]
- Kaveh, A.; Mahjoubi, S. Hypotrochoid spiral optimization approach for sizing and layout optimization of truss structures with multiple frequency constraints. Eng. Comput. 2019, 35, 1443–1462. [Google Scholar] [CrossRef]
- Mahjoubi, S.; Barhemat, R.; Bao, Y. Optimal placement of triaxial accelerometers using hypotrochoid spiral optimization algorithm for automated monitoring of high-rise buildings. Autom. Constr. 2020, 118, 103273. [Google Scholar] [CrossRef]
- Nasir, A.; Tokhi, M.; Abd Ghani, N.; Ahmad, M. A novel hybrid spiral dynamics bacterial chemotaxis algorithm for global optimization with application to controller design. In Proceedings of the 2012 UKACC International Conference on Control, Cardiff, UK, 3–5 September 2012; pp. 753–758. [Google Scholar]
- Nasir, A.N.K.; Tokhi, M.O.; Abd Ghani, N.M.; Raja Ismail, R.M.T. Novel adaptive spiral dynamics algorithms for global optimization. In Proceedings of the 2012 IEEE 11th International Conference on Cybernetic Intelligent Systems (CIS), Guildford, UK, 9–11 September 2012; pp. 99–104. [Google Scholar] [CrossRef]
- YÜZGEÇ, U.; Tufan, İ. Adaptive Spiral Optimization Algorithm for Benchmark Problems. Bilecik Şeyh Edebali Üniv. Fen Bilim. Derg. 2016, 3, 8–15. [Google Scholar]
- Wang, W.; Chen, Y.; Yang, C.; Li, Y.; Xu, B.; Huang, K.; Xiang, C. An efficient optimal sizing strategy for a hybrid electric air-ground vehicle using adaptive spiral optimization algorithm. J. Power Sources 2022, 517, 230704. [Google Scholar] [CrossRef]
- Nasir, A.; Tokhi, M.; Omar, M.; Ghani, N. An improved spiral dynamic algorithm and its application to fuzzy modelling of a twin rotor system. In Proceedings of the 2014 World Symposium on Computer Applications & Research (WSCAR), Sousse, Tunisia, 18–20 January 2014; pp. 1–6. [Google Scholar]
- Nasir, A.; Tokhi, M.O. An improved spiral dynamic optimization algorithm with engineering application. IEEE Trans. Syst. Man Cybern. Syst. 2015, 45, 943–954. [Google Scholar] [CrossRef]
- Hashim, M.; Tokhi, M. Enhanced chaotic spiral dynamic algorithm with application to controller design. In Proceedings of the 2016 IEEE International Conference on Power and Energy (PECon), Melaka, Malaysia, 28–29 November 2016; pp. 752–756. [Google Scholar]
- Hashim, M.; Tokhi, M. Chaotic spiral dynamics optimization algorithm. In Advances in Cooperative Robotics; World Scientific: Singapore, 2017; pp. 551–558. [Google Scholar]
- Hashim, M.; Tokhi, M. Greedy spiral dynamic algorithm with application to controller design. In Proceedings of the 2016 IEEE Conference on Systems, Process and Control (ICSPC), Melaka, Malaysia, 16–18 December 2016; pp. 29–32. [Google Scholar]
- Cruz-Duarte, J.M.; Martin-Diaz, I.; Munoz-Minjares, J.; Sanchez-Galindo, L.A.; Avina-Cervantes, J.G.; Garcia-Perez, A.; Correa-Cely, C.R. Primary study on the stochastic spiral optimization algorithm. In Proceedings of the 2017 IEEE International Autumn Meeting on Power, Electronics and Computing (ROPEC), Ixtapa, Mexico, 8–10 November 2017; pp. 1–6. [Google Scholar]
- Cruz-Duarte, J.M.; Amaya, I.; Ortíz-Bayliss, J.C.; Correa, R. Solving microelectronic thermal management problems using a generalized spiral optimization algorithm. Appl. Intell. 2021, 51, 5622–5643. [Google Scholar] [CrossRef]
- Matajira-Rueda, D.; Cruz-Duarte, J.M.; Garcia-Perez, A.; Avina-Cervantes, J.G.; Correa-Cely, C.R. A new improvement scheme of spiral algorithm (performance test). In Proceedings of the 2018 IEEE International Autumn Meeting on Power, Electronics and Computing (ROPEC), Ixtapa, Mexico, 14–16 November 2018; pp. 1–6. [Google Scholar]
- Ma, Y.; Xu, Y.; Wu, L.; Xu, T.; Zhao, X.; Cai, L. Face Image Deblurring Based on Iterative Spiral Optimazation. In Chinese Conference on Biometric Recognition; Springer: Cham, Switzerland, 2019; pp. 163–170. [Google Scholar]
- Tsai, C.W.; Huang, B.C.; Chiang, M.C. A novel spiral optimization for clustering. In Mobile, Ubiquitous, and Intelligent Computing; Springer: Berlin/Heidelberg, Germany, 2014; pp. 621–628. [Google Scholar]
- Nasir, A.; Tokhi, M.O. A novel hybrid bacteria-chemotaxis spiral-dynamic algorithm with application to modelling of flexible systems. Eng. Appl. Artif. Intell. 2014, 33, 31–46. [Google Scholar] [CrossRef]
- Kasruddin Nasir, A.N.; Ahmad, M.A.; Tokhi, M.O. Hybrid spiral-bacterial foraging algorithm for a fuzzy control design of a flexible manipulator. J. Low Freq. Noise, Vib. Act. Control. 2021, 14613484211035646. [Google Scholar] [CrossRef]
- Sharma, S.; Kumar, S.; Nayyar, A. Logarithmic spiral based local search in artificial bee colony algorithm. In International Conference on Industrial Networks and Intelligent Systems; Springer: Cham, Switzerland, 2019; pp. 15–27. [Google Scholar]
- Sharma, S.; Kumar, S.; Sharma, K. Archimedean spiral based artificial bee colony algorithm. J. Stat. Manag. Syst. 2019, 22, 1301–1313. [Google Scholar] [CrossRef]
- Guo, M.; Wang, J.S.; Zhu, L.; Guo, S.S.; Xie, W. Improved ant lion optimizer based on spiral complex path searching patterns. IEEE Access 2020, 8, 22094–22126. [Google Scholar] [CrossRef]
- Goher, K.; Almeshal, A.; Agouri, S.; Nasir, A.; Tokhi, M.; Alenezi, M.; Al Zanki, T.; Fadlallah, S. Hybrid spiral-dynamic bacteria-chemotaxis algorithm with application to control two-wheeled machines. Robot. Biomim. 2017, 4, 1–15. [Google Scholar] [CrossRef]
- Kasaiezadeh, A.; Khajepour, A.; Waslander, S.L. Spiral bacterial foraging optimization method. In Proceedings of the 2010 American Control Conference, Baltimore, MD, USA, 30 June–2 July 2010; pp. 4845–4850. [Google Scholar]
- Kasaiezadeh, A.; Khajepour, A.; Waslander, S.L. Spiral bacterial foraging optimization method: Algorithm, evaluation and convergence analysis. Eng. Optim. 2014, 46, 439–464. [Google Scholar] [CrossRef]
- Pal, R.; Saraswat, M. Histopathological image classification using enhanced bag-of-feature with spiral biogeography-based optimization. Appl. Intell. 2019, 49, 3406–3424. [Google Scholar] [CrossRef]
- Pandey, A.C.; Rajpoot, D.S. Spam review detection using spiral cuckoo search clustering method. Evol. Intell. 2019, 12, 147–164. [Google Scholar] [CrossRef]
- Nasir, A.N.; Razak, A.A.; Ismail, R.M.; Ahmad, M.A. A hybrid spiral-genetic algorithm for global optimization. J. Telecommun. Electron. Comput. Eng. (JTEC) 2018, 10, 93–97. [Google Scholar]
- Chen, K.; Zhou, F.Y.; Yuan, X.F. Hybrid particle swarm optimization with spiral-shaped mechanism for feature selection. Expert Syst. Appl. 2019, 128, 140–156. [Google Scholar] [CrossRef]
- Duarte, H.M.M.; de Carvalho, R.L. Hybrid particle swarm optimization with spiral-shaped mechanism for solving high-dimension problems. Acad. J. Comput. Eng. Appl. Math. 2020, 1, 1–6. [Google Scholar] [CrossRef]
- Hassan, S.M.; Ibrahim, R.; Saad, N.; Asirvadam, V.S.; Bingi, K. Hybrid APSO—Spiral dynamic algorithms with application to tuning of filtered PPI controller in a wirelessHART environment. J. Intell. Fuzzy Syst. 2019, 37, 597–610. [Google Scholar] [CrossRef]
- Hassan, S.M.; Ibrahim, R.; Saad, N.; Bingi, K.; Asirvadam, V.S. Hybrid ABFA-APSO Algorithm. In Hybrid PID Based Predictive Control Strategies for WirelessHART Networked Control Systems; Springer: Cham, Switzerland, 2020; pp. 121–140. [Google Scholar]
- Rizal, N.A.M.; Jusof, M.F.M.; Abd Razak, A.A.; Mohammad, S.; Nasir, A.N.K. Spiral sine-cosine algorithm for global optimization. In Proceedings of the 2019 IEEE 9th Symposium on Computer Applications & Industrial Electronics (ISCAIE), Kota Kinabalu, Malaysia, 27–28 April 2019; pp. 234–238. [Google Scholar]
- Zhang, Z.; Huang, H.; Huang, C.; Han, B. An improved TLBO with logarithmic spiral and triangular mutation for global optimization. Neural Comput. Appl. 2019, 31, 4435–4450. [Google Scholar] [CrossRef]
- Rbouh, I.; El Imrani, A.A. Hurricane-based optimization algorithm. AASRI Procedia 2014, 6, 26–33. [Google Scholar] [CrossRef]
- Mirjalili, S. Moth-flame optimization algorithm: A novel nature-inspired heuristic paradigm. Knowl.-Based Syst. 2015, 89, 228–249. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The whale optimization algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Mohamed, A.A.A.; Mohamed, Y.S.; El-Gaafary, A.A.; Hemeida, A.M. Optimal power flow using moth swarm algorithm. Electr. Power Syst. Res. 2017, 142, 190–206. [Google Scholar] [CrossRef]
- Abdo, M.; Kamel, S.; Ebeed, M.; Yu, J.; Jurado, F. Solving non-smooth optimal power flow problems using a developed grey wolf optimizer. Energies 2018, 11, 1692. [Google Scholar] [CrossRef]
- Dhiman, G.; Kumar, V. Seagull optimization algorithm: Theory and its applications for large-scale industrial engineering problems. Knowl.-Based Syst. 2019, 165, 169–196. [Google Scholar] [CrossRef]
- Harifi, S.; Khalilian, M.; Mohammadzadeh, J.; Ebrahimnejad, S. Emperor Penguins Colony: A new metaheuristic algorithm for optimization. Evol. Intell. 2019, 12, 211–226. [Google Scholar] [CrossRef]
- Dhiman, G.; Kaur, A. STOA: A bio-inspired based optimization algorithm for industrial engineering problems. Eng. Appl. Artif. Intell. 2019, 82, 148–174. [Google Scholar] [CrossRef]
- Zou, Y. The whirlpool algorithm based on physical phenomenon for solving optimization problems. Eng. Comput. 2019, 36, 664–690. [Google Scholar] [CrossRef]
- Han, X.; Xu, Q.; Yue, L.; Dong, Y.; Xie, G.; Xu, X. An improved crow search algorithm based on spiral search mechanism for solving numerical and engineering optimization problems. IEEE Access 2020, 8, 92363–92382. [Google Scholar] [CrossRef]
- Zhao, W.; Zhang, Z.; Wang, L. Manta ray foraging optimization: An effective bio-inspired optimizer for engineering applications. Eng. Appl. Artif. Intell. 2020, 87, 103300. [Google Scholar] [CrossRef]
- Alsattar, H.; Zaidan, A.; Zaidan, B. Novel meta-heuristic bald eagle search optimisation algorithm. Artif. Intell. Rev. 2020, 53, 2237–2264. [Google Scholar] [CrossRef]
- Wu, J.; Wang, Y.G.; Burrage, K.; Tian, Y.C.; Lawson, B.; Ding, Z. An improved firefly algorithm for global continuous optimization problems. Expert Syst. Appl. 2020, 149, 113340. [Google Scholar] [CrossRef]
- Eid, H.F.; Garcia-Hernandez, L.; Abraham, A. Spiral water cycle algorithm for solving multi-objective optimization and truss optimization problems. Eng. Comput. 2021, 1–11. [Google Scholar] [CrossRef]
- Mokeddem, D. A new improved salp swarm algorithm using logarithmic spiral mechanism enhanced with chaos for global optimization. Evol. Intell. 2021, 1–31. [Google Scholar] [CrossRef]
- Ouyang, C.; Qiu, Y.; Zhu, D. Adaptive Spiral Flying Sparrow Search Algorithm. Sci. Program. 2021, 2021, 6505253. [Google Scholar] [CrossRef]
- Xu, Z.; Gui, W.; Heidari, A.A.; Liang, G.; Chen, H.; Wu, C.; Turabieh, H.; Mafarja, M. Spiral Motion Mode Embedded Grasshopper Optimization Algorithm: Design and Analysis. IEEE Access 2021, 9, 71104–71132. [Google Scholar] [CrossRef]
- Abualigah, L.; Yousri, D.; Abd Elaziz, M.; Ewees, A.A.; Al-qaness, M.A.; Gandomi, A.H. Aquila Optimizer: A novel meta-heuristic optimization Algorithm. Comput. Ind. Eng. 2021, 157, 107250. [Google Scholar] [CrossRef]
- Kumar, V.; Kaleka, K.K.; Kaur, A. Spiral-inspired spotted hyena optimizer and its application to constraint engineering problems. Wirel. Pers. Commun. 2021, 116, 865–881. [Google Scholar] [CrossRef]
- Li, M.; Li, C.; Huang, Z.; Huang, J.; Wang, G.; Liu, P.X. Spiral-based chaotic chicken swarm optimization algorithm for parameters identification of photovoltaic models. Soft Comput. 2021, 25, 12875–12898. [Google Scholar] [CrossRef]
- Mohammadi-Balani, A.; Nayeri, M.D.; Azar, A.; Taghizadeh-Yazdi, M. Golden eagle optimizer: A nature-inspired metaheuristic algorithm. Comput. Ind. Eng. 2021, 152, 107050. [Google Scholar] [CrossRef]
- Mehne, S.H.H.; Mirjalili, S. Moth-flame optimization algorithm: Theory, literature review, and application in optimal nonlinear feedback control design. In Nature-Inspired Optimizers; Springer International Publishing: Cham, Switzerland, 2020; pp. 143–166. [Google Scholar]
- Shehab, M.; Abualigah, L.; Al Hamad, H.; Alabool, H.; Alshinwan, M.; Khasawneh, A.M. Moth–flame optimization algorithm: Variants and applications. Neural Comput. Appl. 2020, 32, 9859–9884. [Google Scholar] [CrossRef]
- Bingi, K.; Kulkarni, R.R.; Mantri, R. Development of Hybrid Algorithm Using Moth-Flame and Particle Swarm Optimization. In Proceedings of the 2021 IEEE Madras Section Conference (MASCON), Chennai, India, 27–28 August 2021; pp. 1–6. [Google Scholar]
- Helmi, A.; Alenany, A. An enhanced Moth-flame optimization algorithm for permutation-based problems. Evol. Intell. 2020, 13, 741–764. [Google Scholar] [CrossRef]
- Gharehchopogh, F.S.; Gholizadeh, H. A comprehensive survey: Whale Optimization Algorithm and its applications. Swarm Evol. Comput. 2019, 48, 1–24. [Google Scholar] [CrossRef]
- Abd Elaziz, M.; Mirjalili, S. A hyper-heuristic for improving the initial population of whale optimization algorithm. Knowl.-Based Syst. 2019, 172, 42–63. [Google Scholar] [CrossRef]
- Salgotra, R.; Singh, U.; Saha, S. On some improved versions of whale optimization algorithm. Arab. J. Sci. Eng. 2019, 44, 9653–9691. [Google Scholar] [CrossRef]
- Puri, H.; Chaudhary, J.; Bingi, K.; Sivaramakrishnan, U.; Panga, N. Design of Adaptive Weighted Whale Optimization Algorithm. In Proceedings of the 2021 IEEE Madras Section Conference (MASCON), Chennai, India, 27–28 August 2021; pp. 1–6. [Google Scholar]
- Fan, Q.; Chen, Z.; Li, Z.; Xia, Z.; Yu, J.; Wang, D. A new improved whale optimization algorithm with joint search mechanisms for high-dimensional global optimization problems. Eng. Comput. 2020, 37, 1851–1878. [Google Scholar] [CrossRef]
- Ma, B.; Lu, P.M.; Liu, Y.G.; Zhou, Q.; Hu, Y.T. Shared seagull optimization algorithm with mutation operators for global optimization. AIP Adv. 2021, 11, 125217. [Google Scholar] [CrossRef]
- Wang, S.; Jia, H.; Abualigah, L.; Liu, Q.; Zheng, R. An improved hybrid aquila optimizer and harris hawks algorithm for solving industrial engineering optimization problems. Processes 2021, 9, 1551. [Google Scholar] [CrossRef]
- Sadollah, A.; Eskandar, H.; Bahreininejad, A.; Kim, J.H. Water cycle algorithm with evaporation rate for solving constrained and unconstrained optimization problems. Appl. Soft Comput. 2015, 30, 58–71. [Google Scholar] [CrossRef]
- Sadollah, A.; Eskandar, H.; Bahreininejad, A.; Kim, J.H. Water cycle, mine blast and improved mine blast algorithms for discrete sizing optimization of truss structures. Comput. Struct. 2015, 149, 1–16. [Google Scholar] [CrossRef]
- Mirjalili, S. The ant lion optimizer. Adv. Eng. Softw. 2015, 83, 80–98. [Google Scholar] [CrossRef]
- Assiri, A.S.; Hussien, A.G.; Amin, M. Ant Lion Optimization: Variants, hybrids, and applications. IEEE Access 2020, 8, 77746–77764. [Google Scholar] [CrossRef]
- Abualigah, L.; Shehab, M.; Alshinwan, M.; Mirjalili, S.; Abd Elaziz, M. Ant lion optimizer: A comprehensive survey of its variants and applications. Arch. Comput. Methods Eng. 2021, 28, 1397–1416. [Google Scholar] [CrossRef]
- Heidari, A.A.; Faris, H.; Mirjalili, S.; Aljarah, I.; Mafarja, M. Ant lion optimizer: Theory, literature review, and application in multi-layer perceptron neural networks. In Nature-Inspired Optimizers; Springer: Cham, Switzerland, 2020; pp. 23–46. [Google Scholar]
- Mirjalili, S.; Gandomi, A.H.; Mirjalili, S.Z.; Saremi, S.; Faris, H.; Mirjalili, S.M. Salp Swarm Algorithm: A bio-inspired optimizer for engineering design problems. Adv. Eng. Softw. 2017, 114, 163–191. [Google Scholar] [CrossRef]
- Abualigah, L.; Shehab, M.; Alshinwan, M.; Alabool, H. Salp swarm algorithm: A comprehensive survey. Neural Comput. Appl. 2020, 32, 11195–11215. [Google Scholar] [CrossRef]
- Faris, H.; Mirjalili, S.; Aljarah, I.; Mafarja, M.; Heidari, A.A. Salp swarm algorithm: Theory, literature review, and application in extreme learning machines. In Nature-Inspired Optimizers; Springer International Publishing: Cham, Switzerland, 2020; pp. 185–199. [Google Scholar]
- Kulkarni, R.R.; Sunder, M.; Bingi, K.; Mantri, R.; Selvaraj, K.R. An Inertia Weight Concept-Based Salp Swarm Optimization Algorithm. In Proceedings of the 2021 IEEE Madras Section Conference (MASCON), Chennai, India, 27–28 August 2021; pp. 1–6. [Google Scholar]
- Xue, J.; Shen, B. A novel swarm intelligence optimization approach: Sparrow search algorithm. Syst. Sci. Control Eng. 2020, 8, 22–34. [Google Scholar] [CrossRef]
- Ouyang, C.; Zhu, D.; Qiu, Y. Lens Learning Sparrow Search Algorithm. Math. Probl. Eng. 2021, 2021, 9935090. [Google Scholar] [CrossRef]
- Hassan, S.M.; Ibrahim, R.; Saad, N.; Asirvadam, V.S.; Bingi, K. Spiral dynamic algorithm based optimal PPI controller for WirelessHART networked systems. In Proceedings of the 2017 IEEE 3rd International Symposium in Robotics and Manufacturing Automation (ROMA), Kuala Lumpur, Malaysia, 19–21 September 2017; pp. 1–6. [Google Scholar]
- Ali, S.K.; Tokhi, M.; Ishak, A.J.; Al Rezage, G. PID and Aaptive Spiral Dynamic Algorithm in Controlling Human Arm Movements. In Assistive Robotics: Proceedings of the 18th International Conference on CLAWAR 2015; World Scientific: Singapore, 2015; pp. 87–94. [Google Scholar]
- Ghani, N.A.; Nasir, A.K.; Tokhi, M.O. Integrated phases modular fuzzy logic control with spiral dynamic optimization for stair descending in a wheelchair. In Proceedings of the 2014 19th International Conference on Methods and Models in Automation and Robotics (MMAR), Miedzyzdroje, Poland, 2–5 September 2014; pp. 46–51. [Google Scholar]
- Razali, N.; Ghani, N.M.A.; Bari, B.S. Lifting and stabilizing of two-wheeled wheelchair system using interval type-2 fuzzy logic control based spiral dynamic algorithm. Bull. Electr. Eng. Inform. 2021, 10, 3019–3031. [Google Scholar] [CrossRef]
- Masrom, M.; A Ghani, N.; Tokhi, M. Particle swarm optimization and spiral dynamic algorithm-based interval type-2 fuzzy logic control of triple-link inverted pendulum system: A comparative assessment. J. Low Freq. Noise, Vib. Act. Control 2021, 40, 367–382. [Google Scholar] [CrossRef]
- Ouadi, A.; Bentarzi, H.; Recioui, A. Optimal multiobjective design of digital filters using spiral optimization technique. SpringerPlus 2013, 2, 1–13. [Google Scholar] [CrossRef][Green Version]
- Benasla, L.; Belmadani, A.; Rahli, M. Spiral optimization algorithm for solving combined economic and emission dispatch. Int. J. Electr. Power Energy Syst. 2014, 62, 163–174. [Google Scholar] [CrossRef]
- Dosoglu, M.K.; Guvenc, U.; Duman, S.; Sonmez, Y.; Kahraman, H.T. Symbiotic organisms search optimization algorithm for economic/emission dispatch problem in power systems. Neural Comput. Appl. 2018, 29, 721–737. [Google Scholar] [CrossRef]
- Hao, M.R.; Ismail, R.M.T.R.; Ahmad, M.A. Using spiral dynamic algorithm for maximizing power production of wind farm. In Proceedings of the 2017 International Conference on Applied System Innovation (ICASI), Sapporo, Japan, 13–17 May 2017; pp. 1706–1709. [Google Scholar]
- Cao, Y.; Rad, H.N.; Jamali, D.H.; Hashemian, N.; Ghasemi, A. A novel multi-objective spiral optimization algorithm for an innovative solar/biomass-based multi-generation energy system: 3E analyses, and optimization algorithms comparison. Energy Convers. Manag. 2020, 219, 112961. [Google Scholar] [CrossRef]
- Kaveh, M.R.; Hooshmand, R.A.; Madani, S.M. Simultaneous optimization of re-phasing, reconfiguration and DG placement in distribution networks using BF-SD algorithm. Appl. Soft Comput. 2018, 62, 1044–1055. [Google Scholar] [CrossRef]
- Mehran, A.; Khademzadeh, A.; Saeidi, S. DSM: A Heuristic Dynamic Spiral Mapping algorithm for network on chip. IEICE Electron. Express 2008, 5, 464–471. [Google Scholar] [CrossRef]
- Brinkmann, G. Problems and scope of spiral algorithms and spiral codes for polyhedral cages. Chem. Phys. Lett. 1997, 272, 193–198. [Google Scholar] [CrossRef]
- Jia, H.C.; Hou, L.H. A spiral optimized deep neural network based adolescence physical fitness determination and training process analysis. Aggress. Violent Behav. 2021, 101561. [Google Scholar] [CrossRef]
- Ismail, M.J.; Ibrahim, R.; Ismail, I. Adaptive neural network prediction model for energy consumption. In Proceedings of the 2011 3rd International Conference on Computer Research and Development, Shanghai, China, 11–13 March 2011; Volume 4, pp. 109–113. [Google Scholar]
- Mauch, S.; Reger, J. Real-time implementation of the spiral algorithm for Shack-Hartmann wavefront sensor pattern sorting on an FPGA. Measurement 2016, 92, 63–69. [Google Scholar] [CrossRef]
- Altahir, A.A.; Asirvadam, V.S.; Hamid, N.H.B.; Sebastian, P.; Saad, N.B.; Ibrahim, R.B.; Dass, S.C. Optimizing visual surveillance sensor coverage using dynamic programming. IEEE Sens. J. 2017, 17, 3398–3405. [Google Scholar] [CrossRef]
- McCaffrey, J. Spiral Dynamics Optimization with Python. Available online: https://visualstudiomagazine.com/articles/2021/08/02/spiral-dynamics-python.aspx (accessed on 8 February 2021).
- Tamura, K.; Yasuda, K. Quantitative analysis based tuning law for convergence rate of spiral optimization. In Proceedings of the 2012 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Seoul, Korea, 14–17 October 2012; pp. 767–772. [Google Scholar]
- Suzuki, K.; Tamura, K.; Yasuda, K. Study on cluster-structured spiral optimization. In Proceedings of the 2014 IEEE International Conference on Systems, Man, and Cybernetics (SMC), San Diego, CA, USA, 5–8 October 2014; pp. 94–99. [Google Scholar]
- Tamura, K.; Yasuda, K. A parameter setting method for spiral optimization from stability analysis of dynamic equilibrium point. SICE J. Control. Meas. Syst. Integr. 2014, 7, 173–182. [Google Scholar] [CrossRef]
- Cruz, J.; Amaya, I.; Correa, R. Optimal rectangular microchannel design, using simulated annealing, unified particle swarm and spiral algorithms, in the presence of spreading resistance. Appl. Therm. Eng. 2015, 84, 126–137. [Google Scholar] [CrossRef]
- Tamura, K.; Yasuda, K. Spiral optimization algorithm using periodic descent directions. SICE J. Control. Meas. Syst. Integr. 2016, 9, 134–143. [Google Scholar] [CrossRef]
- Sidarto, K.A.; Kania, A. Computing Complex Roots of Systems of Nonlinear Equations Using Spiral Optimization Algorithm with Clustering. In Proceedings of the International Conference on Computational Science and Technology, Kuala Lumpur, Malaysia, 29–30 November 2017; Springer: Berlin/Heidelberg, Germany, 2017; pp. 390–398. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Year | Algorithm | Author | Inspiration | Spiral Type | Source Code Link |
|---|---|---|---|---|---|---|
| [40,41] | 2010 | Spiral Bacterial Foraging Optimization Algorithm | Alireza Kasaiezadeh et al. | E. coli bacteria foraging behavior | Spiral | – |
| [8] | 2011 | Galaxy-Based Search Algorithm | Hamed Shah-Hosseini | Arms of the spiral galaxy | Spiral | – |
| [51] | 2014 | Hurricane-Based Optimization Algorithm | Isamil Rbouh et al. | Behavior of hurricanes, radial wind, and pressure profiles | Logarithmic spiral | – |
| [52] | 2015 | Moth–flame Optimization Algorithm | Seyedali Mirjalili | Moths’ navigation behavior around the flame | Logarithmic spiral | https://seyedalimirjalili.com/mfo (accessed on 1 December 2021) |
| [53] | 2016 | Whale Optimization Algorithm | Seyedali Mirjalili | Whales’ hunting bubble net phenomenon | Logarithmic spiral | https://seyedalimirjalili.com/woa (accessed on 1 December 2021) |
| [54] | 2017 | Moth Swarm Optimization Algorithm | Al-Attar Ali Mohamed et al. | Moths orientation towards the moonlight | Logarithmic spiral | https://mathworks.com/matlabcentral/fileexchange/57822 (accessed on 1 December 2021) |
| [50] | 2018 | Improved Teaching–Learning-Based Optimization Algorithm | Zhuoran Zhang et al. | effect of teacher influence on learners | Logarithmic spiral | – |
| [55] | 2018 | Developed Grey Wolf Optimization Algorithm | Mostafa Abdo et al. | Grey wolves leadership and hunting strategies | Logarithmic spiral | – |
| [56] | 2019 | Seagull Optimization Algorithm | Gaurav Dhiman et al. | Seagulls’ migration and attacking behavior | 3D logarithmic spiral | https://mathworks.com/matlabcentral/fileexchange/75180 (accessed on 1 December 2021) |
| [57] | 2019 | Emperor Penguins Colony Optimization Algorithm | Sasan Harifi et al. | Emperor penguins behavior | Logarithmic spiral | – |
| [36,37] | 2019 | Spiral Artificial Bee Colony Algorithm | Sonal Sharma et al. | Honey bee swarms’ intelligent foraging behavior | Logarithmic and Archimedean spirals | – |
| [58] | 2019 | Sooty Tern Optimization Algorithm | Gaurav Dhiman et al. | Sooty terns’ migration and attacking behaviors | Spiral | https://mathworks.com/matlabcentral/fileexchange/76667 (accessed on 1 December 2021) |
| [59] | 2019 | Whirlpool Algorithm | Yuanyang Zou et al. | Physical phenomenon of whirlpool | Spiral | – |
| [60] | 2020 | Improved Crow Search Algorithm | Xiaoxia Han et al. | Crows intelligent behavior of searching, hiding and retrieving food | Logarithmic Spiral | – |
| [38] | 2020 | Improved Ant Lion Optimization Algorithm | M. W. Guo et al. | Natural hunting phenomenon of antlions | Archimedes, Cycloid, Epitrochoid, Hypotrochoid, Logarithmic, Rose, Inverse, and Overshoot spirals | – |
| [61] | 2020 | Manta Ray Foraging Optimization Algorithm | Weiguo Zhao et al. | Manta rays intelligent behavior | Logarithmic spiral | https://www.mathworks.com/matlabcentral/fileexchange/73130 (accessed on 1 December 2021) |
| [62] | 2020 | Bald Eagle Search Optimization Algorithm | H. A. Alsattar et al. | Bald eagles hunting behavior | Spiral | https://mathworks.com/matlabcentral/fileexchange/86862 (accessed on 1 December 2021) |
| [63] | 2020 | Improved Firefly Algorithm | Jinran Wu et al. | Fireflies’ flashing behavior | Logarithmic spiral | https://github.com/wujrtudou/AdaptiveFireflyAlgorithm (accessed on 1 December 2021) |
| [64] | 2021 | Spiral Water Cycle Algorithm | Heba F. Eid et al. | Natural hydrological cycle process | Hyperbolic spiral | – |
| [65] | 2021 | Improved Slap Swarm Optimization Algorithm | Diab Mokeddem | Behavior of slap chains | Logarithmic spiral | – |
| [66] | 2021 | Spiral Flying Sparrow Search Algorithm | Chengtian Ouyang et al. | Sparrow’s behaviors during group wisdom, antipredation, and foraging | Logarithmic spiral | – |
| [67] | 2021 | Spiral Grasshopper Optimization Algorithm | Zhangze Xu et al. | Grasshoppers foraging and swarming behavior | Logarithmic spiral | – |
| [68] | 2021 | Aquila Optimization Algorithm | Laith Abualigah et al. | Aquilas’ behavior during prey catching | Spiral | https://www.mathworks.com/matlabcentral/fileexchange/89381 (accessed on 1 December 2021) |
| [69] | 2021 | Spiral Spotted Hyena Optimization Algorithm | Vijay Kumar et al. | Spotted hyenas behavior during hunting | Logarithmic spiral | – |
| [70] | 2021 | Spiral Chicken Swarm Optimization Algorithm | Miao Li et al. | Chicken swarms’ hierarchical order and its behaviors | Logarithmic spiral | – |
| [71] | 2021 | Golden Eagle Optimization Algorithm | Abdolkarim Mohammadi-Balani et al. | Golden eagles’ intelligent behavior during hunting | Spiral | https://mathworks.com/matlabcentral/fileexchange/84430 (accessed on 1 December 2021) |
| Ref. | Year | Algorithm | Validation | Application | SO/MO | Comparison Algorithms | ||||
|---|---|---|---|---|---|---|---|---|---|---|
| Status | Functions | System | Dim | Tool | Cost Function | |||||
| [107] | 1997 | SDO | ✗ | - | Cubic Polyhedral Cages | - | - | - | SO | - |
| [106] | 2008 | Dynamic Spiral Mapping | ✗ | - | 2D Mesh Topologies | 3 | SMAP | Reconfiguration Time | MO | Partially, Fully DSM |
| [9] | 2010 | SDO | ✓ | Rosenbrock, Minima, Rastrigin | - | - | MATLAB | - | SO | GA, PSO, ALO |
| [11] | 2011 | SDO | ✓ | Schwefel, Minima, Rastrigin, Griewank | - | - | - | - | SO | Differential evolution (DE), PSO |
| [21] | 2012 | Adaptive SDO | ✓ | Sphere, Ackely, Grienwank | - | - | - | - | SO | SDO, Linear, Quadratic, and Exponential Adaptive SDO |
| [20] | 2012 | Hybrid SDO-BCA | ✓ | Sphere, Ackley, Rastrigin, Griewank | Flexible Manipulator System | 30 | MATLAB | ISE | SO | BFA, SDO |
| [113] | 2012 | SDO | ✓ | Sphere, Schwefel, Minima, Rastrigin, Alpine, Levy, Ackely | - | - | - | - | SO | - |
| [100] | 2013 | SDO | ✗ | - | Digital Filters | 10 | - | Weighted Magnitude, Lp Norm | SO | - |
| [14] | 2014 | Adaptive SDO, Hybrid SDO | ✓ | Rastrigin, Sphere, Griewank, Ackley | Flexible Manipulator System, Economic/Emission Dispatch, Neural Network Training | 30, 15, 9 | - | RMSE, MSE | MO | SDO |
| [114] | 2014 | Cluster-structured SDO | ✓ | Rosenbrock, Minima | - | - | - | - | SO | SDO |
| [33] | 2014 | Distributed SDO | ✗ | - | Clustering Problems | 10 | C++ | SSE | SO | SDO, Genetic K-Means |
| [34] | 2014 | Hybrid SDO-BCA | ✗ | - | Flexible Manipulator, Twin Rotor Systems | 16 | MATLAB | RMSE | MO | Recursive Least Squares (RLS), Least Mean squares (LMS), PSO, GA, Hybrid GA RLS |
| [24] | 2014 | Improved SDO | ✓ | Sphere, Rosenbrock, Griewank, Rastrigin | Twin Rotor System | 136 | MATLAB | Weighted RMSE | SO | BFA, SDO, Improved SDO |
| [97] | 2014 | SDO | ✗ | - | Stair Descending in a Wheelchair | 10 | MATLAB | Weighted MSE | SO | Trial and Error Method |
| [101] | 2014 | SDO | ✗ | - | Economic/Emission Dispatch | 3, 4, 60 | - | Min | SO | - |
| [115] | 2014 | SDO | ✓ | Sphere, Rosenbrock, Schwefel, Rastrigin, Ackley, Griewank, Minima, Levy, Six-hump | - | - | MATLAB | - | SO | PSO |
| [25] | 2015 | Improved SDO | ✓ | Sphere, Rosenbrock, Rastrigin, Ackley | Twin Rotor System | 50 | MATLAB | Weighted RMSE | SO | SDO |
| [96] | 2015 | SDO | ✗ | - | Controlling Robotic Arm Movement | 3 | - | Steady State Error | SO | - |
| [116] | 2015 | SDO | ✗ | - | Rectangular Microchannel Heat Sink | 5 | – | Generation Rate | MO | SA, Unified PSO |
| [26] | 2016 | Enhanced Chaotic SDO | ✓ | Sphere, Ackely, Grienwank | Single-Link Flexible Manipulator | 50 | - | MSE | SO | SDO, ABC |
| [28] | 2016 | Greedy SDO | ✓ | Sphere, Ackely, Grienwank | Single-Link Flexible Manipulator | 50 | - | MSE | SO | SDO |
| [16] | 2016 | Linear Adaptive SDO | ✓ | Sphere, Rosenbrock, Ackley, Rastrigin, Griewank, Dixon-Price, Goldstien-Price, Six-hump Camel | Flexible Manipulator Rig | 16 | MATLAB | RMSE | SO | SDO, BFA, Improved BFA |
| [117] | 2016 | SDO | ✓ | Sphere, Schwefel, Ackley, Minima, Bohachevsky, Rosenbrock | - | - | - | - | SO | ABC |
| [110] | 2016 | SDO | ✗ | - | Shack–Hartmann Wavefront Sensor Pattern Sorting | 28 | MATLAB | RMSE | SO | B-Spline, Zernike |
| [102] | 2016 | SDO | ✗ | - | Economic/Emission Dispatch | 40 | MATLAB | Optimal Power | SO | BBO, GA, Evolutionary Algorithm (EA) |
| [105] | 2017 | Hybrid BFA-SDO | ✗ | - | Network With Power Distribution | 4 | - | Weighted Error | MO | Simulated Annealing (SA), GA, Tabu Search (TS), Hybrid BFA-PSO |
| [39] | 2017 | Hybrid SDO-BCA | ✗ | - | Two-Wheeled Robotic Vehicle | 9 | - | MSE | MO | BFA, SDO |
| [95] | 2017 | SDO | ✗ | - | Controller Tuning | 2 | MATLAB | ITAE | SO | - |
| [15] | 2017 | SDO | ✓ | Sphere, Schwefel, Minima, Levy | - | - | MATLAB | - | SO | - |
| [103] | 2017 | SDO | ✗ | - | Maximizing Power Production of Wind Farm | 50 | - | Maximum Power | SO | PSO, Game Theoretic |
| [18] | 2018 | Hypotrochoid SDO | ✗ | - | 10, 37, 52, 72, 200-bar Planar, Spatial Truss Structures | 10, 14, 8, 16, 29 | MATLAB | Min | SO | SDO, GA, PSO, DE, Hybrid SDO |
| [50] | 2018 | Spiral TLBO | ✓ | Sphere, Schwefel, Rosenbrock, Step, Quartic, Schwefel, Rastrigin, Ackley, Griewank, Penalized | Pressure Vessel, Welded Beam Design Problems | 4, 4 | MATLAB | Min | SO | TLBO, Whale Optimization Algorithm (WOA), Grey Wolf Optimizer (GWO) |
| [118] | 2018 | SDO | ✗ | - | System of Nonlinear Equations | 2, 4, 20 | C++ | Min | SO | - |
| [31] | 2018 | Stochastic SDO | ✓ | Booth, Chichinadze, Zettl, Dixon–Price, Griewank, Mishra, Wing, Rastrign | - | - | MATLAB | - | MO | Deterministic SDO, EFO, DE, Unified PSO |
| [37] | 2019 | Archimedean Spiral-ABC | ✓ | Griewank, Salomon, Inverted cosine, Neumaier, Beale, Colville, Kowalik, Rosenbrock, spring, Goldstein–Price | - | - | - | Mean Error | SO | Archimedean Spiral-inspired Local Search (ASLS), Modified ABC, Best-So-Far ABC |
| [42] | 2019 | Biogeography-based SDO | ✓ | Sphere, Schwefel, Axis, Quatic, Rosenbrock, Rastrigin, Griewank, Ackley, Step | CEC 2017 Benchmark Problems | - | - | Cluster count | SO | DE, BBO, Slap Swarm Optimization Algorithm (SSOA), GWO, WOA, GSA |
| [99] | 2019 | Hybrid PSO-SDO | ✗ | - | Triple-link Inverted Pendulum on Two-wheels | 4 | Simwise4D | RMSE | MO | GSA, ABC, GWO, Ant Colony Optimization (ACO), GA |
| [32] | 2019 | Iterative SDO | ✗ | - | Face Image De-blurring, Generative Adversarial Network Model | - | PyTorch | Loss Function | SO | |
| [36] | 2019 | Spiral ABC | ✓ | 10 functions of various orders | - | - | - | - | SO | ABC, Modified ABC, Best-So-Far ABC |
| [43] | 2019 | Spiral CS | ✓ | Schwefel, Quartic, Rosenbrock, Sphere, Powell, Brown, Ackley, Griewank | Spam Detection | - | Python | - | SO | PSO, DE. GA, CS, Improved CS |
| [49] | 2019 | Spiral-based SCA | ✓ | Sphere, Rosenbrock | - | - | - | - | SO | SDO, SCA |
| [19] | 2020 | Hypotrochoid SDO | ✗ | - | Automated Monitoring of High-rise Buildings | 50 | - | Modal Assurance Criterion | MO | PSO, ABC, SDO, TLBO |
| [38] | 2020 | Improved ALO - Spiral | ✓ | 10 Unimodel, 8 Multimodel, 10 Combinatorial, 6 Multi Objective | Pressure Vessel | 4 | - | Multicriteria Function | SO, MO | Hypotrochoid, Rose, Logarithmic, Epitrochoid, Archimedes, Cycloid, and Inverse Spiral ALO |
| [104] | 2020 | Multiobjective SDO | ✗ | - | Multigeneration Energy System | - | - | Min Cost | MO | GA, PSO, EA |
| [17] | 2021 | Adaptive Hypotrochoid SDO | ✓ | Shubert, Ackley, Levy, Perm, Sphere, Trid, Booth, Beale, Powell, Shekel | - | - | - | - | SO | SDO, Adaptive SDO, Hypotrochoid SDO |
| [30] | 2021 | Reflection-based stochastic SDO | ✓ | Keane, Hosaki, Branin, Bird, Hansen, Ursem Waves, Damavandi, Giunta, Rana, 2nd Minimum | Microchannel Heat Sink | 3 | MATLAB | Minimum Entropy Generation | SO | Unified PSO, Deterministic SDO, Cuckoo search |
| [108] | 2021 | SDO | ✗ | – | Physical Fitness Determination Using Deep Neural Networks | 20 | – | RMSE | SO | GA, PSO |
| [99] | 2021 | SDO | ✗ | – | Fuzzy Control of Inverted Pendulum | 20 | MATLAB | RMSE | SO | Trial and Error, PSO |
| [35] | 2021 | Hybrid SDO-BFA | ✓ | 28 Functions | Fuzzy Control of Flexible Manipulator | 103 | MATLAB | SO | MAE | SDO, BFA, Hybrid SDO-Bacteria Chemotaxis |
| [98] | 2021 | SDO | ✗ | – | Two-wheeled Wheelchair System | 20 | MATLAB | RMSE | SO | – |
| [23] | 2022 | Adaptive SDO | ✗ | – | Hybrid Electrical Vehicles | 4 | MATLAB | Weighted Error | MO | SDO, Enhanced GA, Adaptive PSO |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Omar, M.B.; Bingi, K.; Prusty, B.R.; Ibrahim, R. Recent Advances and Applications of Spiral Dynamics Optimization Algorithm: A Review. Fractal Fract. 2022, 6, 27. https://doi.org/10.3390/fractalfract6010027
Omar MB, Bingi K, Prusty BR, Ibrahim R. Recent Advances and Applications of Spiral Dynamics Optimization Algorithm: A Review. Fractal and Fractional. 2022; 6(1):27. https://doi.org/10.3390/fractalfract6010027
Chicago/Turabian StyleOmar, Madiah Binti, Kishore Bingi, B Rajanarayan Prusty, and Rosdiazli Ibrahim. 2022. "Recent Advances and Applications of Spiral Dynamics Optimization Algorithm: A Review" Fractal and Fractional 6, no. 1: 27. https://doi.org/10.3390/fractalfract6010027
APA StyleOmar, M. B., Bingi, K., Prusty, B. R., & Ibrahim, R. (2022). Recent Advances and Applications of Spiral Dynamics Optimization Algorithm: A Review. Fractal and Fractional, 6(1), 27. https://doi.org/10.3390/fractalfract6010027