Adaptive Neural Network Sliding Mode Control for Nonlinear Singular Fractional Order Systems with Mismatched Uncertainties



Abstract
1. Introduction
- A new necessary and sufficient condition for admissibility of SFOSs is presented, which contains no equality constraints.
- By expanding the dimension of the SFOS, a new sliding surface is constructed.
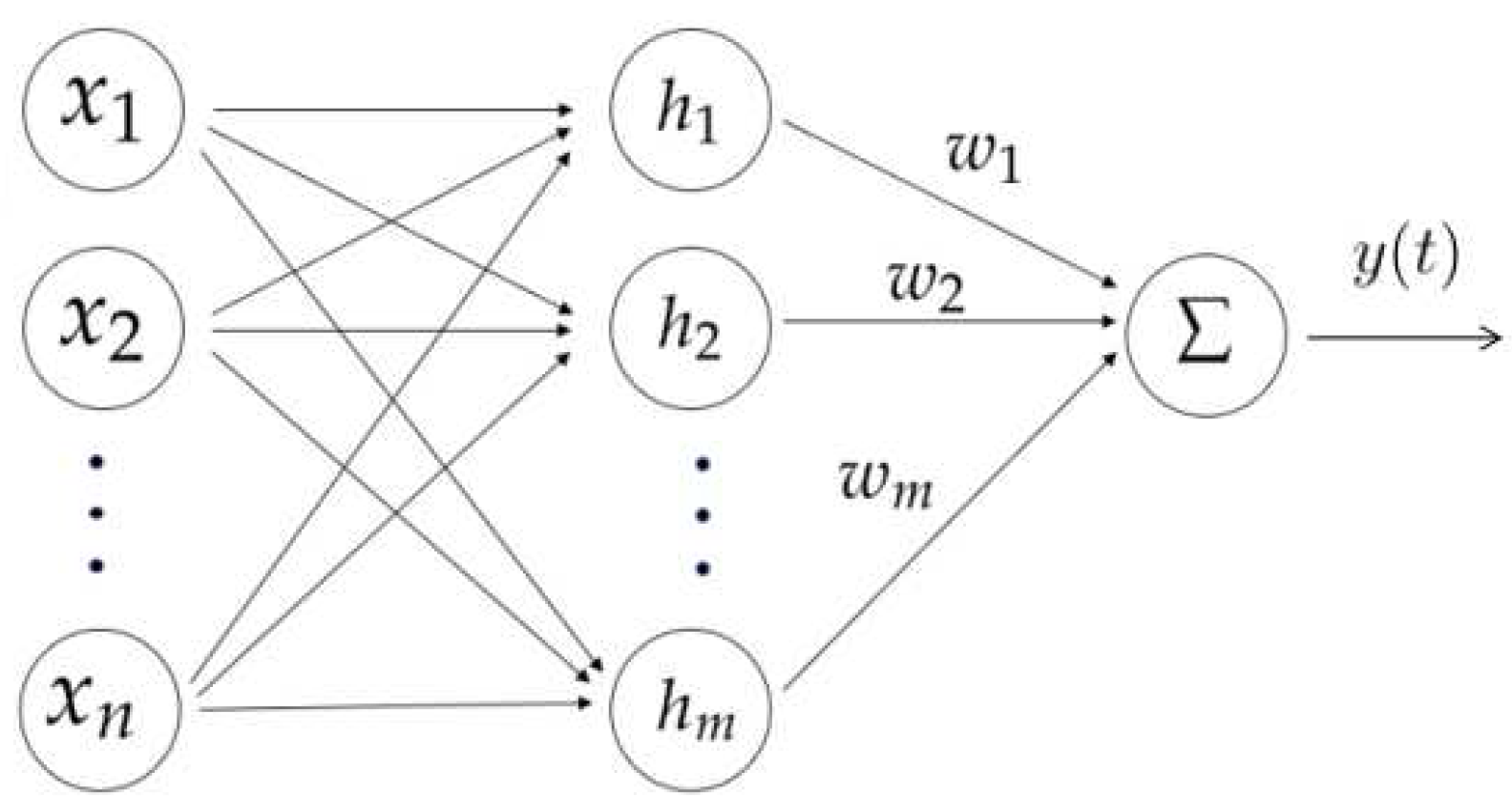
- Based on RBF neural network method, is constructed to estimate the nonlinear term . The restricted assumption that is norm bounded in [41] is removed.
- The adaptive control law is exploited to guarantee that the SFOS reaches the sliding surface in a finite time.
2. Preliminaries
3. Main Results
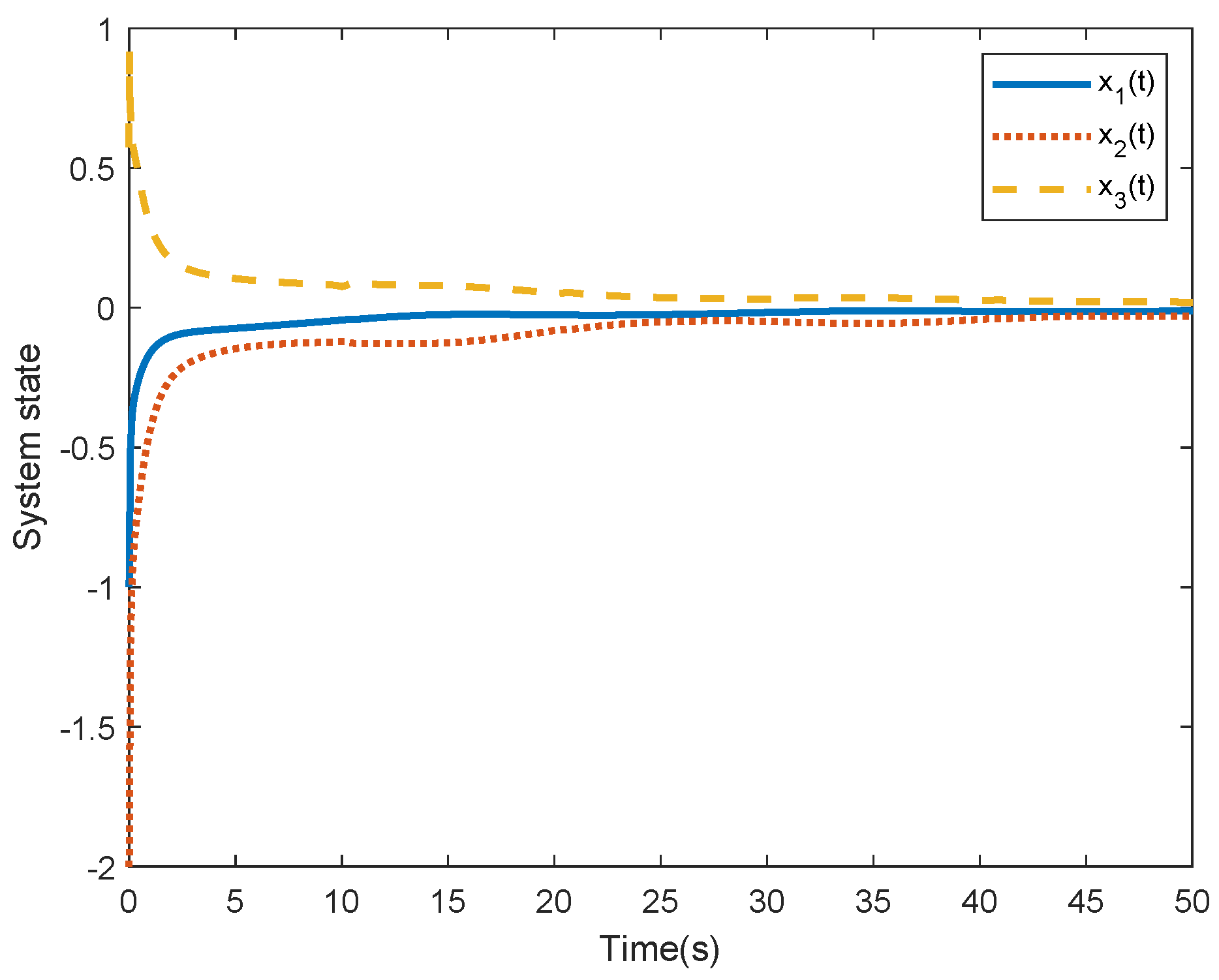
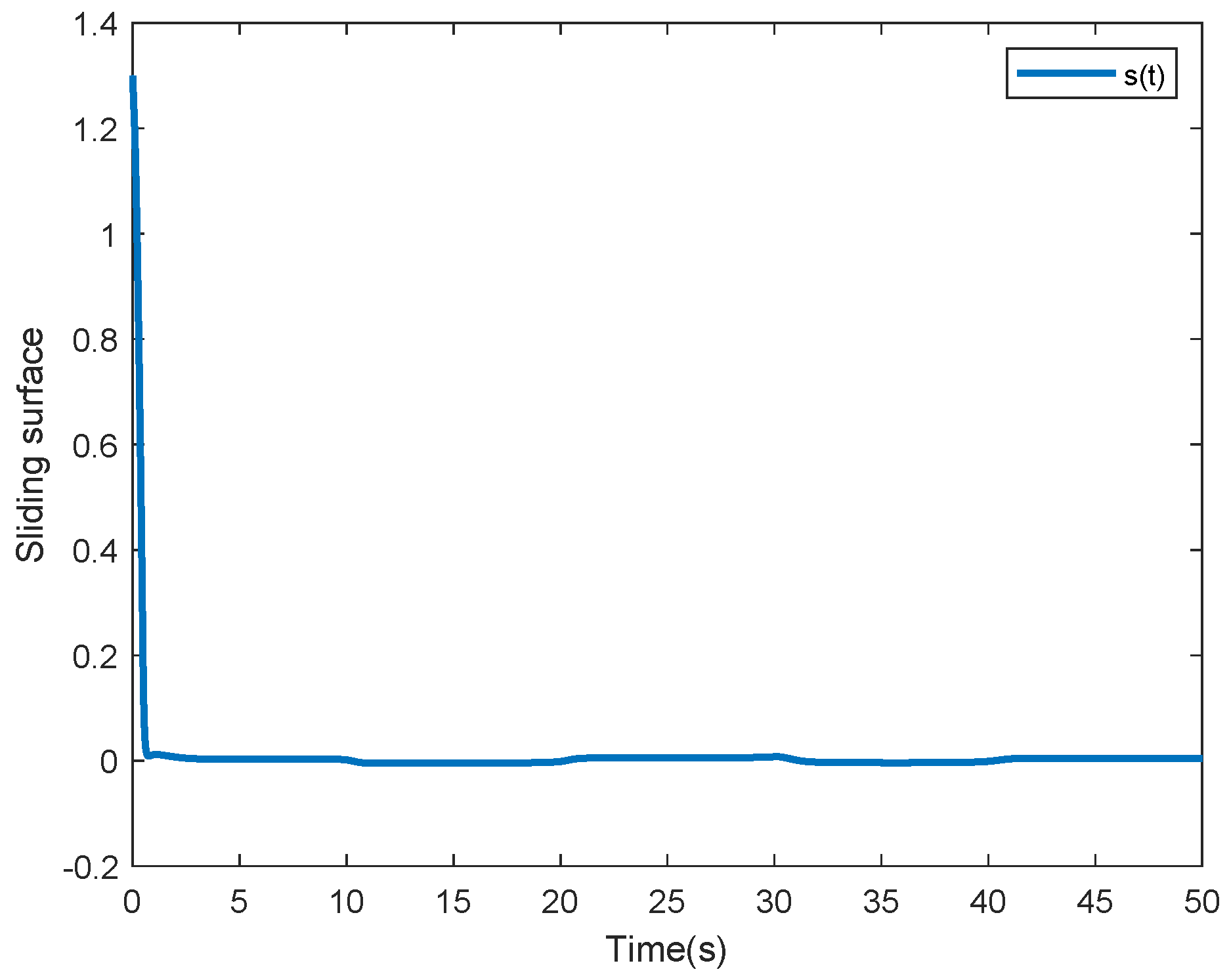
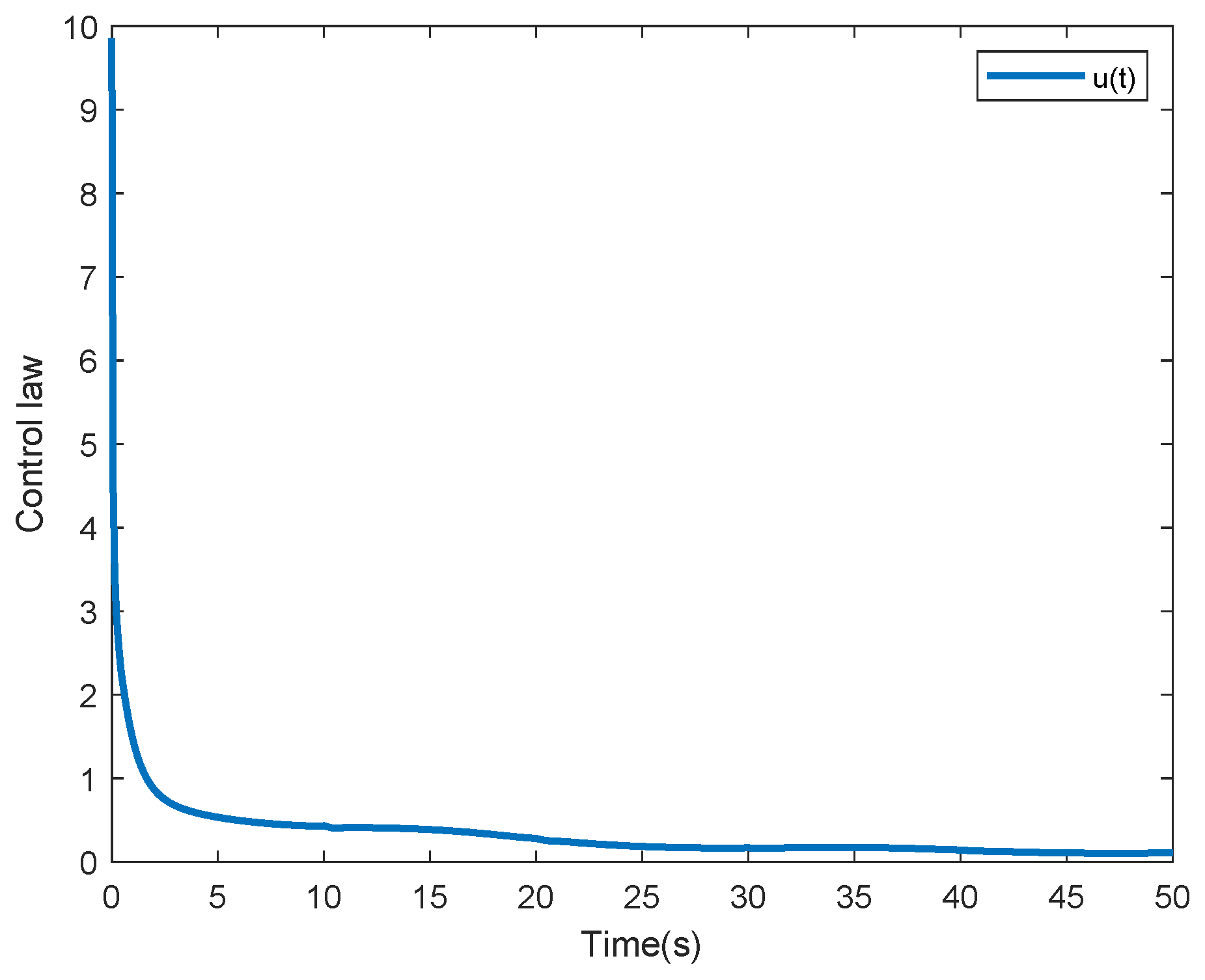
4. Simulation Example
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Li, D.Z.; Tian, X.Y.; Jin, Q.B.; Hirasawa, K. Adaptive fractional-order total variation image restoration with split Bregman iteration. ISA Trans. 2018, 82, 210–222. [Google Scholar] [CrossRef]
- Su, X.; Yu, K.S.; Yu, M. Research on early warning algorithm for economic management based on Lagrangian fractional calculus. Chaos Solitons Fractals 2019, 128, 44–50. [Google Scholar] [CrossRef]
- Guo, Y.X.; Ma, B.L. Global sliding mode with fractional operators and application to control robot manipulators. Int. J. Control 2017, 92, 1497–1510. [Google Scholar] [CrossRef]
- Matignon, D. Stability properties for generalized fractional differential systems. In Proceedings of the IMACS-SMC, Lille, France, 9–12 July 1996. [Google Scholar]
- Li, Y.; Chen, Y.Q.; Podlubuy, I. Stability of fractional-order nonlinear dynamic systems: Lyapunov direct method and generalized Mittag-Leffler stability. Comput. Math. Appl. 2010, 59, 1810–1821. [Google Scholar] [CrossRef]
- Sabatier, J.; Moze, M.; Farges, C. LMI stability conditions for fractional order systems. Comput. Math. Appl. 2010, 59, 1594–1609. [Google Scholar] [CrossRef]
- Lu, J.G.; Chen, Y.Q. Robust stability and stabilization of fractional-order interval systems with the fractional order α: 0 < α < 1 case. IEEE Trans. Autom. Control 2010, 55, 152–158. [Google Scholar]
- Lu, J.G.; Chen, G.R. Robust stability and stabilization of fractional-order interval systems: An LMI approach. IEEE Trans. Autom. Control 2009, 54, 1294–1299. [Google Scholar]
- Zhang, X.F.; Chen, Y.Q. D-stability based LMI criteria of stability and stabilization for fractional order systems. In Proceedings of the ASME 2015 International Design Engineering Technical Conference and Computers and Information in Engineering Conference, Boston, MA, USA, 2–5 August 2015. [Google Scholar]
- Liang, S.; Wei, Y.H.; Pan, J.W.; Gao, Q.; Wang, Y. Bounded real lemmas for fractional order systems. Int. J. Autom. Comput. 2015, 12, 192–198. [Google Scholar] [CrossRef]
- Shen, J.; Lam, J. Non-existence of finite-time stable equilibria in fractional-order nonlinear systems. Automatica 2014, 50, 547–551. [Google Scholar] [CrossRef]
- Dai, L. Singular Control Systems; Springer: Berlin, Germany, 1989. [Google Scholar]
- Xu, S.Y.; Lam, J.; Zou, Y.; Li, J.Z. Roubst admissibility of time-varying singular systems with commensurate time delays. Automatica 2009, 45, 2714–2717. [Google Scholar] [CrossRef]
- Ren, J.C.; Zhang, Q.L. Robust normalization and guaranteed cost control for a class of uncertain descriptor systems. Automatica 2012, 48, 1693–1697. [Google Scholar] [CrossRef]
- Ma, Y.C.; Jia, X.R.; Zhang, Q.L. Robust observer-based finite-time H∞ control for discrete-time singular Markovian jumping system with time delay and actuator saturation. Nonlinear Anal. Hybrid Syst. 2018, 28, 1–22. [Google Scholar] [CrossRef]
- Ibrir, S.; Bettayeb, M. New sufficient conditions for observer-based control of frational order uncertain systems. Automatica 2015, 59, 216–223. [Google Scholar] [CrossRef]
- Marir, S.; Chadli, M.; Bouagada, D. A novel approach of admissibility for singular linear continuous-time fractional-order systems. Int. J. Control. Autom. Syst. 2017, 15, 959–964. [Google Scholar] [CrossRef]
- Lin, C.; Chen, B.; Shi, P.; Yu, J.P. Necessary and sufficient conditions of observer-based stabilization for a class of fractional-order descriptor systems. Syst. Control Lett. 2018, 112, 31–35. [Google Scholar] [CrossRef]
- Zhang, X.F.; Chen, Y.Q. Admissibility and robust stabilization of continuous linear singular fractional order systems with the fractional order α: The 0 < α < 1 case. ISA Trans. 2017, 82, 42–50. [Google Scholar]
- Zhang, X.F.; Zhao, Z.L. Normalization and stabilization for rectangular singular fractional order T-S fuzzy systems. Fuzzy Sets Syst. 2020, 381, 140–153. [Google Scholar] [CrossRef]
- Wei, Y.H.; Tse, P.W.; Yao, Z.; Wang, Y. The output feedback control synthesis for a class of singular fractional order systems. ISA Trans. 2017, 69, 1–9. [Google Scholar] [CrossRef]
- Zhan, T.; Liu, X.Z.; Ma, S.P. A new singular system approach to output feedback sliding mode control for fractional order nonlinear systems. J. Frankl. Inst. 2018, 355, 6746–6762. [Google Scholar] [CrossRef]
- Zhang, Q.H.; Lu, J.Q. Robust stability of output feedback controlled fractional-order systems with structured uncertainties in all system coefficient matrices. ISA Trans. 2020, 105, 51–62. [Google Scholar] [CrossRef] [PubMed]
- Wei, Y.H.; Wang, J.C.; Liu, T.Y.; Wang, Y. Sufficient and necessary conditions for stabilizing singular fractional order systems with partially measurable state. J. Frankl. Inst. 2019, 356, 1975–1990. [Google Scholar] [CrossRef]
- Ren, J.C.; Zhang, Q.L. Robust H∞ control for uncertain descriptor systems by proportional-derivative state feedback. Int. J. Control 2010, 83, 89–96. [Google Scholar] [CrossRef]
- Nguyen, A.T.; Xuan-Mung, N.; Hong, S.K. Quadcopter adaptive trajectory tracking control: A new approach via backstepping technique. Appl. Sci. 2019, 9, 3873. [Google Scholar] [CrossRef]
- Xuan-Mung, N.; Hong, S.K. Robust backstepping trajectory tracking control of a quadrotor with input saturation via extended state observer. Appl. Sci. 2019, 9, 5184. [Google Scholar] [CrossRef]
- Yan, X.G.; Edwards, C. Adaptive sliding-mode-observer-based fault reconstruction for nonlinear systems with parametric uncertainties. IEEE Trans. Ind. Electron. 2008, 55, 4029–4036. [Google Scholar]
- Wang, Y.Y.; Gao, Y.B.; Karimi, H.R.; Shen, H.; Fang, Z.J. Sliding mode control of fuzzy singularly perturbed systems with application to electric circuit. IEEE Trans. Syst. Man Cybern. Syst. 2018, 48, 1667–1675. [Google Scholar] [CrossRef]
- Xuan-Mung, N.; Hong, S.K. Improved altitude control algorithm for quadcopter unmanned aerial vehicles. Appl. Sci. 2019, 9, 2122. [Google Scholar] [CrossRef]
- Mung, N.; Hong, S.K. Robust adaptive formation control of quadcopters based on a leader- follower approach. Int. J. Adv. Robot. Syst. 2019, 16, 1–11. [Google Scholar]
- Zhao, Y.; Wang, J.H.; Yan, F.; Shen, Y. Adaptive sliding mode fault-tolerant control for type-2 fuzzy systems with distributed delays. Inf. Sci. 2019, 473, 227–238. [Google Scholar] [CrossRef]
- Zhang, J.X.; Yang, G.H. Prescribed performance fault-tolerant control of uncertain nonlinear systems with unknown control directions. IEEE Trans. Autom. Control 2017, 62, 6529–6535. [Google Scholar] [CrossRef]
- Zhang, J.X.; Yang, G.H. Fault-tolerant output-constrained control of unknown Euler-Lagrange systems with prescribed tracking accuracy. Automatica 2020, 111, 108606. [Google Scholar] [CrossRef]
- Gao, Q.; Feng, G.; Xi, Z.Y.; Wang, Y.; Qiu, J.B. A new design of robust H∞ sliding mode control for uncertain stochastic T–S fuzzy time-delay systems. IEEE Trans. Cybern. 2014, 9, 1556–1566. [Google Scholar] [CrossRef] [PubMed]
- Su, X.J.; Liu, X.X.; Shi, P.; Yang, R.N. Sliding mode control of discrete-time switched systems with repeated scalar nonlinearities. IEEE Trans. Autom. Control 2017, 62, 4604–4610. [Google Scholar] [CrossRef]
- Edwards, C.; Spurgeon, S.K. Sliding Mode Control: Theory and Applications; Taylor: London, UK, 1998. [Google Scholar]
- Yin, C.; Dadras, S.; Zhong, S.M.; Chen, Y.Q. Control of a novel class of fractional-order chaotic systems via adaptive sliding mode control approach. Appl. Math. Model. 2013, 37, 2469–2483. [Google Scholar] [CrossRef]
- Nian, F.Z.; Liu, X.M.; Zhang, Y.Q. Sliding mode synchronization of fractional-order complex chaotic system with parametric and external disturbances. Chaos Solitons Fractals 2018, 116, 22–28. [Google Scholar] [CrossRef]
- Wang, J.; Shao, C.F.; Chen, Y.Q. Fractional order sliding mode control via disturbance observer for a class of fractional order systems with mismatched disturbance. Mechatronics 2018, 53, 8–19. [Google Scholar] [CrossRef]
- Li, R.C.; Zhang, X.F. Adaptive sliding mode observer design for a class of T-S fuzzy descriptor fractional order systems. IEEE Trans. Fuzzy Syst. 2019, 28, 1951–1960. [Google Scholar] [CrossRef]
- Ma, X.; Sun, F.C.; Li, H.B.; He, B. Neural network-based sliding-mode control for multiple rigid-body attitude tracking with inertial information completely unknuwn. Inf. Sci. 2017, 400, 91–104. [Google Scholar] [CrossRef]
- Lin, F.J.; Shen, P.H. Robust fuzzy neural network sliding-mode control for two-axis motion control system. IEEE Trans. Ind. Electron. 2006, 4, 1209–1225. [Google Scholar] [CrossRef]
- Song, S.; Zhang, B.Y.; Song, X.N.; Zhang, Y.J.; Zhang, Z.Q.; Li, W.J. Fractional-order adaptive neuro-fuzzy sliding mode H∞ control for fuzzy singularly perturbed systems. J. Frankl. Inst. 2019, 356, 5027–5048. [Google Scholar] [CrossRef]
- Li, R.C.; Yang, Y. Sliding-mode observer-based fault reconstruction for T-S fuzzy descriptor systems. IEEE Trans. Syst. Man Cybern. Syst. 2019, 99, 2945998. [Google Scholar] [CrossRef]
- Wang, L.Y.; Chai, T.Y.; Zhai, L.F. Neural-network-based terminal sliding-mode control of robotic manipulators including actuator dynamics. IEEE Trans. Ind. Electron. 2009, 56, 3296–3304. [Google Scholar] [CrossRef]
- Xuan-Mung, N.; Hong, S.K. Barometric altitude measurement fault diagnosis for the improvement of quadcopter altitude control. In Proceedings of the 19th International Conference on Control, Automation and Systems, Jeju, Korea, 15–18 October 2019. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Huang, W. Adaptive Neural Network Sliding Mode Control for Nonlinear Singular Fractional Order Systems with Mismatched Uncertainties. Fractal Fract. 2020, 4, 50. https://doi.org/10.3390/fractalfract4040050
Zhang X, Huang W. Adaptive Neural Network Sliding Mode Control for Nonlinear Singular Fractional Order Systems with Mismatched Uncertainties. Fractal and Fractional. 2020; 4(4):50. https://doi.org/10.3390/fractalfract4040050
Chicago/Turabian StyleZhang, Xuefeng, and Wenkai Huang. 2020. "Adaptive Neural Network Sliding Mode Control for Nonlinear Singular Fractional Order Systems with Mismatched Uncertainties" Fractal and Fractional 4, no. 4: 50. https://doi.org/10.3390/fractalfract4040050
APA StyleZhang, X., & Huang, W. (2020). Adaptive Neural Network Sliding Mode Control for Nonlinear Singular Fractional Order Systems with Mismatched Uncertainties. Fractal and Fractional, 4(4), 50. https://doi.org/10.3390/fractalfract4040050