
A Consistent and Implicit Rhie–Chow Interpolation for Drag Forces in Coupled Multiphase Solvers

 , ,
, , 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Governing Equations
3. Traditional Segregated Multiphase Algorithms
4. Novel Coupled Multiphase Framework

5. Coupled Rans-Equation Assembly for Two Phase Flows
5.1. Momentum Equation, Fully Coupled Drag

5.2. Continuity Equation

6. Momentum Interpolation Techniques
6.1. Standard Momentum Interpolation
6.2. Standard Decoupled Multiphase Momentum Interpolation
6.3. Proposed Coupled Multiphase Momentum Interpolation
7. Validation and Results
7.1. Validation on Analytical 1D Case
Numerical Setup
7.2. Analytical 2D Case for the Assessment of the Developed Rhie–Chow Formulation
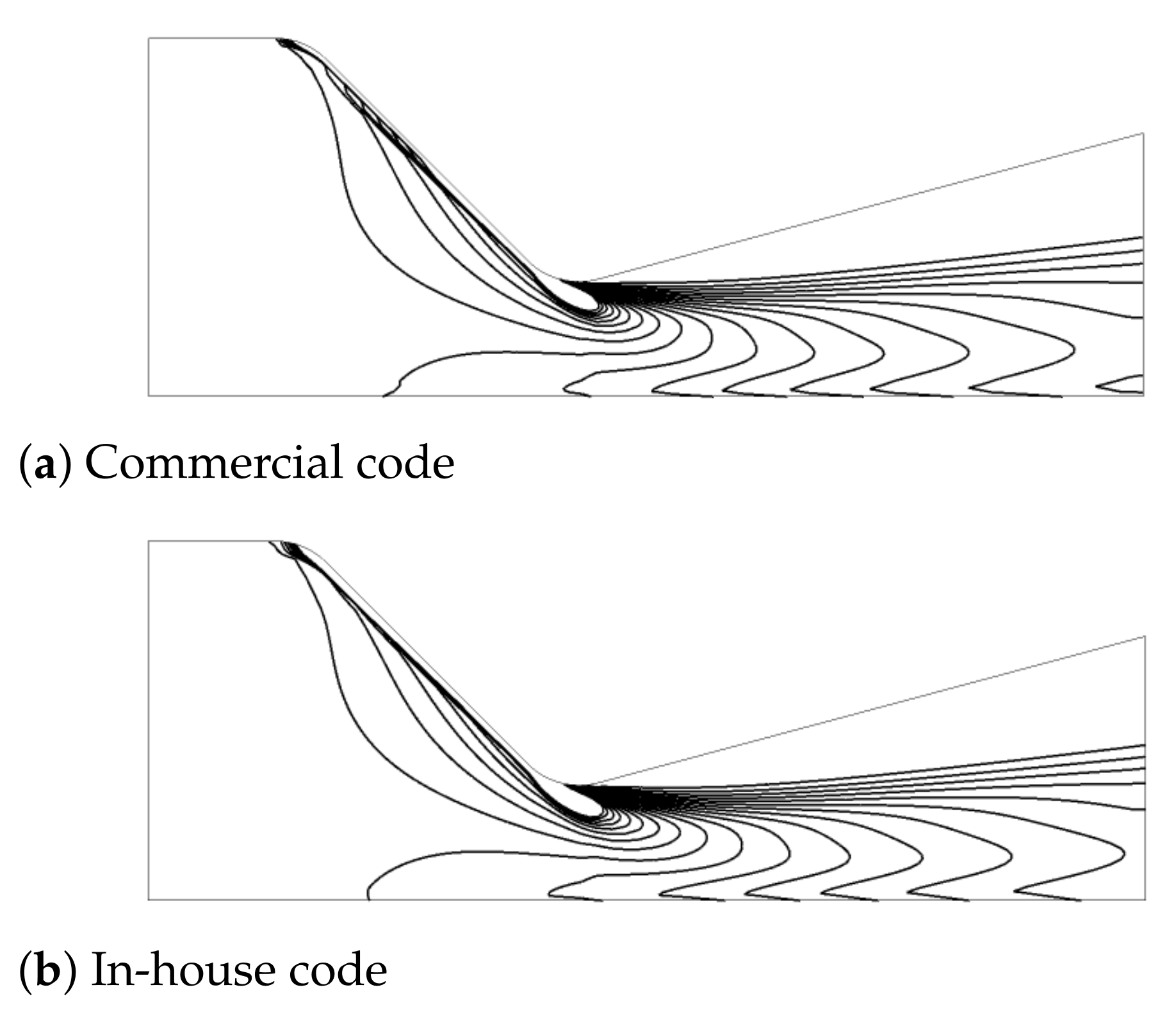
7.3. Two-Phase Flow in a Transonic Nozzle Configuration
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hirt, C.W.; Nichols, B.D. Volume of fluid (VOF) method for the dynamics of free boundaries. J. Comput. Phys. 1981, 39, 201–225. [Google Scholar] [CrossRef]
- Saurel, R.; Abgrall, R. A simple method for compressible multifluid flows. SIAM J. Sci. Comput. 1999, 21, 1115–1145. [Google Scholar] [CrossRef]
- Miller, T.F.; Schmidt, F. Use of a pressure-weighted interpolation method for the solution of the incompressible Navier–Stokes equations on a nonstaggered grid system. Numer. Heat Transf. Part A Appl. 1988, 14, 213–233. [Google Scholar]
- Osher, S.; Sethian, J.A. Fronts propagating with curvature-dependent speed: Algorithms based on Hamilton-Jacobi formulations. J. Comput. Phys. 1988, 79, 12–49. [Google Scholar] [CrossRef]
- Olsson, E.; Kreiss, G. A conservative level set method for two phase flow. J. Comput. Phys. 2005, 210, 225–246. [Google Scholar] [CrossRef]
- Kothe, D.B.; Rider, W.J. Comments on Modeling Interfacial Flows with Volume-of-Fluid Methods; Technical Report; Los Alamos National Laboratory: Los Alamos, NM, USA, 1995.
- Sussman, M.; Puckett, E.G. A coupled level set and volume-of-fluid method for computing 3D and axisymmetric incompressible two-phase flows. J. Comput. Phys. 2000, 162, 301–337. [Google Scholar] [CrossRef]
- Gerber, A. Two-phase Eulerian/Lagrangian model for nucleating steam flow. J. Fluids Eng. 2002, 124, 465–475. [Google Scholar] [CrossRef]
- Kermani, M.; Gerber, A. A general formula for the evaluation of thermodynamic and aerodynamic losses in nucleating steam flow. Int. J. Heat Mass Transf. 2003, 46, 3265–3278. [Google Scholar] [CrossRef]
- Gerber, A.; Kermani, M. A pressure based Eulerian–Eulerian multi-phase model for non-equilibrium condensation in transonic steam flow. Int. J. Heat Mass Transf. 2004, 47, 2217–2231. [Google Scholar] [CrossRef]
- Van Wachem, B.; Almstedt, A.E. Methods for multiphase computational fluid dynamics. Chem. Eng. J. 2003, 96, 81–98. [Google Scholar] [CrossRef]
- Badreddine, H.; Sato, Y.; Niceno, B.; Prasser, H.M. Finite size Lagrangian particle tracking approach to simulate dispersed bubbly flows. Chem. Eng. Sci. 2015, 122, 321–335. [Google Scholar] [CrossRef]
- Kunz, R.F.; Siebert, B.W.; Cope, W.K.; Foster, N.F.; Antal, S.P.; Ettorre, S.M. A coupled phasic exchange algorithm for three-dimensional multi-field analysis of heated flows with mass transfer. Comput. Fluids 1998, 27, 741–768. [Google Scholar] [CrossRef]
- Patankar, S.V.; Spalding, D.B. A calculation procedure for heat, mass and momentum transfer in three-dimensional parabolic flows. Int. J. Heat Mass Transf. 1972, 15, 1787–1806. [Google Scholar] [CrossRef]
- Spalding, D. Developments in the IPSA procedure for numerical computation of multiphase-flow phenomena with interphase slip, unequal temperatures, etc. Numer. Prop. Methodol. Heat Transf. 1983, 421–436. [Google Scholar]
- Spalding, D.B. Numerical computation of multi-phase fluid flow and heat transfer. In Von Karman Inst. for Fluid Dyn. Numerical Computation of Multi-Phase Flows; Pineridge Press: Swansea, UK, 1981; pp. 161–191. [Google Scholar]
- Miller, T.F.; Miller, D.J. A Fourier analysis of the IPSA/PEA algorithms applied to multiphase flows with mass transfer. Comput. Fluids 2003, 32, 197–221. [Google Scholar] [CrossRef]
- Lo, S. Mathematical Basis of A Multi-Phase Flow Model; Report: AEA Technology Plc; UKAEA Atomic Energy Research Establishment Thermal Hydraulics Division: Abingdon-on-Thames, UK, 1989.
- Mangani, L.; Buchmayr, M.; Darwish, M. Development of a novel fully coupled solver in OpenFOAM: Steady-state incompressible turbulent flows in rotational reference frames. Numer. Heat Transf. Part Fundam. 2014, 66, 526–543. [Google Scholar] [CrossRef]
- Mangani, L.; Darwish, M.; Moukalled, F. An OpenFOAM pressure-based coupled CFD solver for turbulent and compressible flows in turbomachinery applications. Numer. Heat Transf. Part Fundam. 2016, 69, 413–431. [Google Scholar] [CrossRef]
- Yeoh, G.H.; Tu, J. Computational Techniques for Multiphase Flows; Butterworth-Heinemann: Oxford, UK, 2019. [Google Scholar]
- Karema, H.; Lo, S. Efficiency of interphase coupling algorithms in fluidized bed conditions. Comput. Fluids 1999, 28, 323–360. [Google Scholar] [CrossRef]
- Mangani, L. Development and Validation of an Object Oriented CFD Solver for Heat Transfer and Combustion Modelling in Turbomachinery Applications. Ph.D. Thesis, Dipartimento di Energetica, Università degli Studi di Firenze, Florence, Italy, 2008. [Google Scholar]
- Hanimann, L.; Mangani, L.; Casartelli, E.; Vogt, D.M.; Darwish, M. Real Gas Models in Coupled Algorithms Numerical Recipes and Thermophysical Relations. Int. J. Turbomach. Propuls. Power 2020, 5, 20. [Google Scholar] [CrossRef]
- Schiller, L. A drag coefficient correlation. Zeit. Ver. Deutsch. Ing. 1933, 77, 318–320. [Google Scholar]
- Rhie, C.; Chow, W. Numerical study of the turbulent flow past an airfoil with trailing edge separation. AIAA J. 1983, 21, 1525–1532. [Google Scholar] [CrossRef]
- Majumdar, S. Role of underrelaxation in momentum interpolation for calculation of flow with nonstaggered grids. Numer. Heat Transf. 1988, 13, 125–132. [Google Scholar] [CrossRef]
- Choi, S.K. Note on the use of momentum interpolation method for unsteady flows. Numer. Heat Transf. Part A Appl. 1999, 36, 545–550. [Google Scholar] [CrossRef]
- Choi, S.K.; Kim, S.O.; Lee, C.H.; Choi, H.K. Use of the momentum interpolation method for flows with a large body force. Numer. Heat Transf. Part B Fundam. 2003, 43, 267–287. [Google Scholar] [CrossRef]
- Yu, B.; Tao, W.Q.; Wei, J.J.; Kawaguchi, Y.; Tagawa, T.; Ozoe, H. Discussion on momentum interpolation method for collocated grids of incompressible flow. Numer. Heat Transf. Part B Fundam. 2002, 42, 141–166. [Google Scholar] [CrossRef]
- Cubero, A.; Fueyo, N. A compact momentum interpolation procedure for unsteady flows and relaxation. Numer. Heat Transf. Part B Fundam. 2007, 52, 507–529. [Google Scholar] [CrossRef]
- Cubero, A.; Sánchez-Insa, A.; Fueyo, N. A consistent momentum interpolation method for steady and unsteady multiphase flows. Comput. Chem. Eng. 2014, 62, 96–107. [Google Scholar] [CrossRef]
- Ferreira, G.G.; Lage, P.L.; Silva, L.F.L.; Jasak, H. Implementation of an implicit pressure–velocity coupling for the Eulerian multi-fluid model. Comput. Fluids 2019, 181, 188–207. [Google Scholar] [CrossRef]
- Morsi, S.; Alexander, A. An investigation of particle trajectories in two-phase flow systems. J. Fluid Mech. 1972, 55, 193–208. [Google Scholar] [CrossRef]
- Moukalled, F.; Darwish, M. A comparative assessment of the performance of mass conservation-based algorithms for incompressible multiphase flows. Numer. Heat Transf. Part B Fundam. 2002, 42, 259–283. [Google Scholar] [CrossRef]
- Darwish, M.; Abdel Aziz, A.; Moukalled, F. A coupled pressure-based finite-volume solver for incompressible two-phase flow. Numer. Heat Transf. Part B Fundam. 2015, 67, 47–74. [Google Scholar] [CrossRef]
- Back, L.; Cuffel, R. Detection of oblique shocks in a conical nozzle with a circular-arc throat. AIAA J. 1966, 4, 2219–2221. [Google Scholar] [CrossRef]
- Chang, H.T.; Hourng, L.W.; Chien, L.C.; Chien, L.C. Application of flux-vector-splitting scheme to a dilute gas–particle jpl nozzle flow. Int. J. Numer. Methods Fluids 1996, 22, 921–935. [Google Scholar] [CrossRef]
- Darwish, M.; Moukalled, F.; Sekar, B. A robust multi-grid pressure-based algorithm for multi-fluid flow at all speeds. Int. J. Numer. Methods Fluids 2003, 41, 1221–1251. [Google Scholar] [CrossRef]
- Moukalled, F.; Darwish, M.; Sekar, B. A pressure-based algorithm for multi-phase flow at all speeds. J. Comput. Phys. 2003, 190, 550–571. [Google Scholar] [CrossRef]









Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY-NC-ND) license (https://creativecommons.org/licenses/by-nc-nd/4.0/).
Share and Cite
Hanimann, L.; Mangani, L.; Darwish, M.; Casartelli, E.; Vogt, D.M. A Consistent and Implicit Rhie–Chow Interpolation for Drag Forces in Coupled Multiphase Solvers. Int. J. Turbomach. Propuls. Power 2021, 6, 7. https://doi.org/10.3390/ijtpp6020007
Hanimann L, Mangani L, Darwish M, Casartelli E, Vogt DM. A Consistent and Implicit Rhie–Chow Interpolation for Drag Forces in Coupled Multiphase Solvers. International Journal of Turbomachinery, Propulsion and Power. 2021; 6(2):7. https://doi.org/10.3390/ijtpp6020007
Chicago/Turabian StyleHanimann, Lucian, Luca Mangani, Marwan Darwish, Ernesto Casartelli, and Damian M. Vogt. 2021. "A Consistent and Implicit Rhie–Chow Interpolation for Drag Forces in Coupled Multiphase Solvers" International Journal of Turbomachinery, Propulsion and Power 6, no. 2: 7. https://doi.org/10.3390/ijtpp6020007
APA StyleHanimann, L., Mangani, L., Darwish, M., Casartelli, E., & Vogt, D. M. (2021). A Consistent and Implicit Rhie–Chow Interpolation for Drag Forces in Coupled Multiphase Solvers. International Journal of Turbomachinery, Propulsion and Power, 6(2), 7. https://doi.org/10.3390/ijtpp6020007