


Application of Traffic Weighted Multi-Maps Based on Disjoint Routing Areas for Static Traffic Assignment


Abstract
1. Introduction
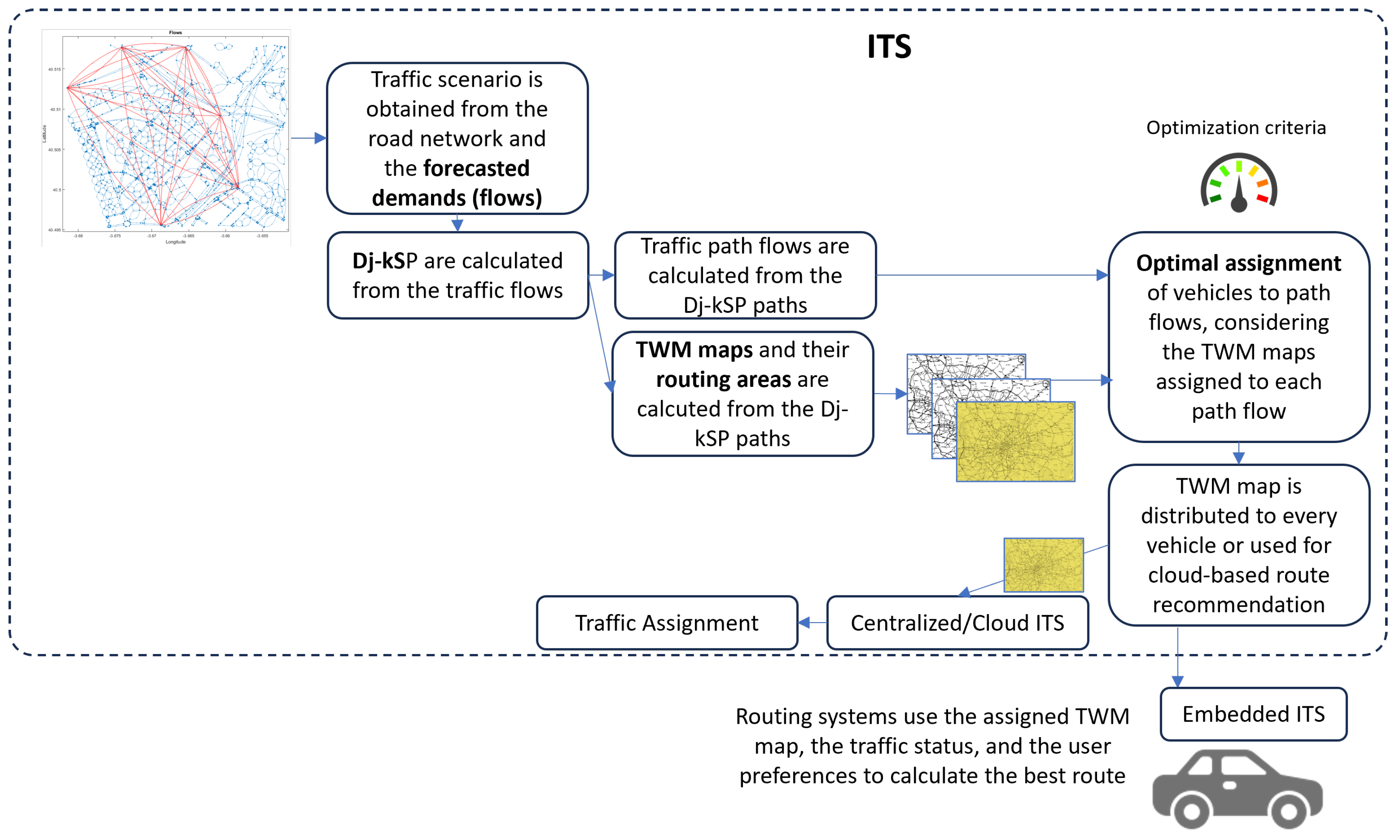
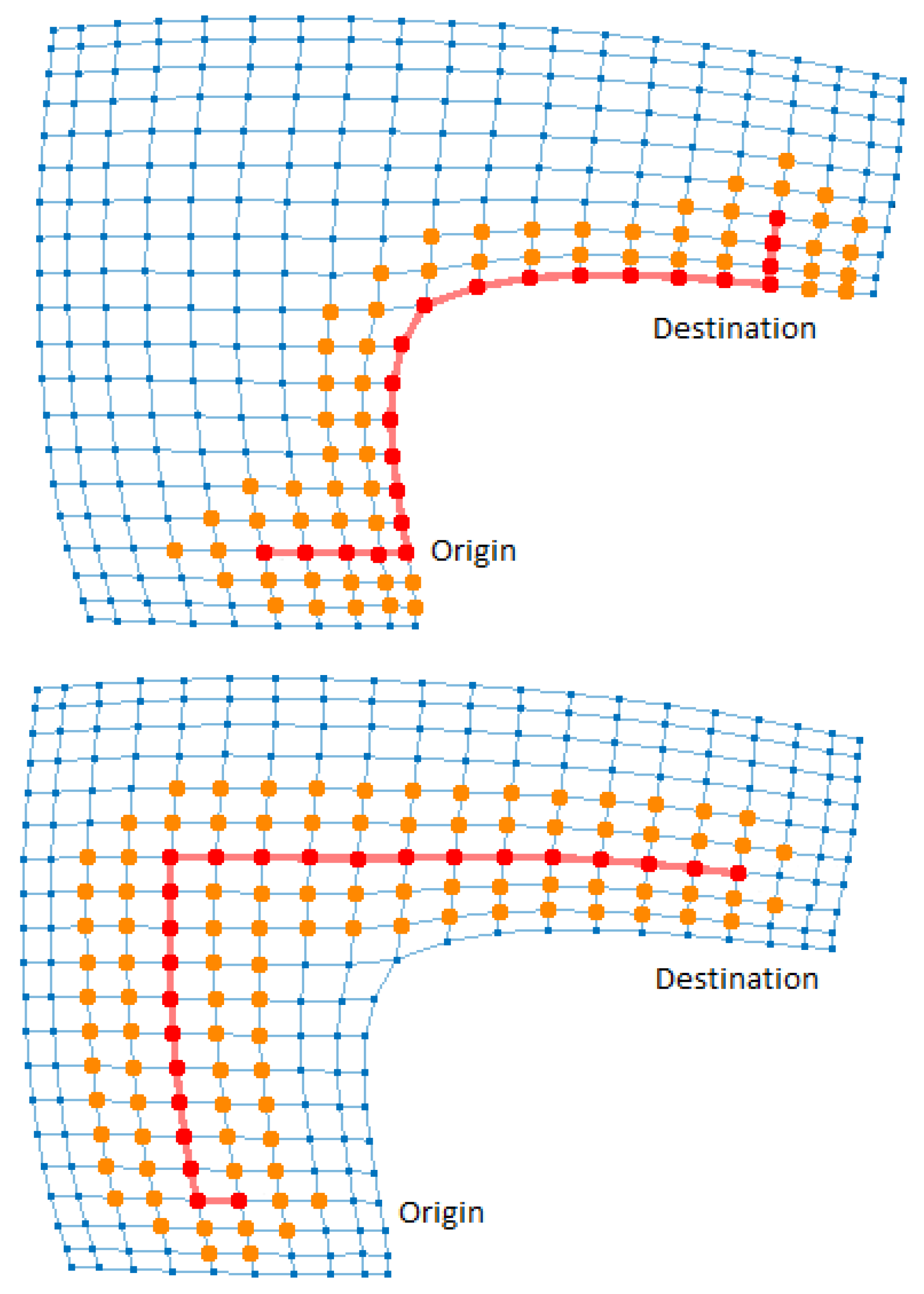
- A new method to create TWM map sets based on traffic flows, using the semi-disjoint k-shortest paths (Dj-kSP) linking their origin/destination nodes [13,18]. These semi-disjoint k-shortest paths define the best low-overlapping routes for each flow and are used to create routing zones that promote traffic usage through them.
- A study for optimal TWM assignment to the vehicles using a per-flow strategy. Optimization is achieved by applying genetic evolutionary algorithms (GA), to find which flow amounts will receive each TWM map.
- An empirical study for real urban networks with synthetic traffic demands, comparing the results with basic traffic assignment policies for lower and higher bounds such as free-flow and all-or-nothing routing methods [5], and with system optimum estimation methods such as Successive Averages Method (MSA), Cumulative Assignment Method (CAM) [5] or the linear programming method proposed by Wei [19].
- A discussion about the obtained results and the computing complexity of the different approaches. Calculating TWM maps based on routing areas around Dj-kSP seems to be a cost-effective solution for the problem. An initial optimal TWM distribution based on the Dj-kSP routes provides a good enough solution like a full TWM distribution optimization, thus offering a practical heuristic solution to the problem.
2. Related Work
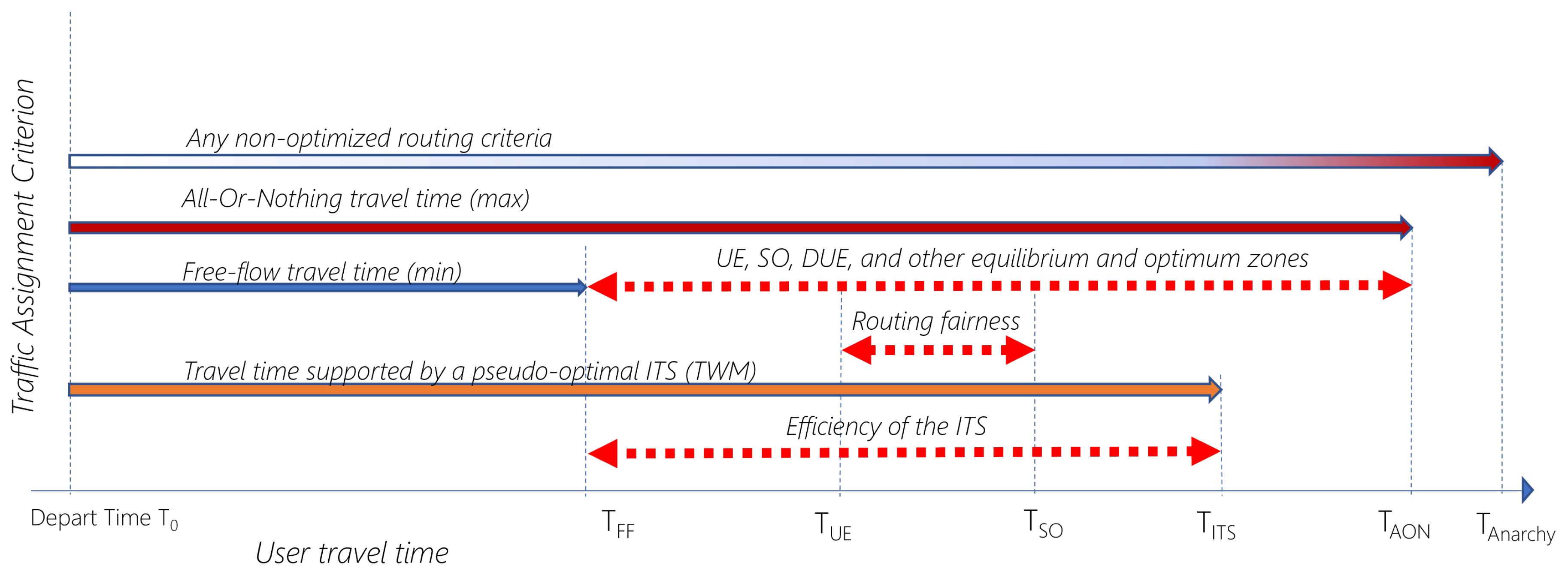
- Free-flow: vehicles use one optimal route and are calculated with basic link costs (1). Though an unreal scenario, it provides a lower bound for routing travel times.
- All-or-nothing: vehicles just use one route and consider link occupancy-costs (3). It is also an unreal scenario, but it delivers a reasonable higher bound in the case of optimal routing.
- System Optimum estimation strategies such as CAM, MSA or LP.
3. Traffic Multi-Maps Generation Based on Disjoint Path Flows
3.1. Traffic Model
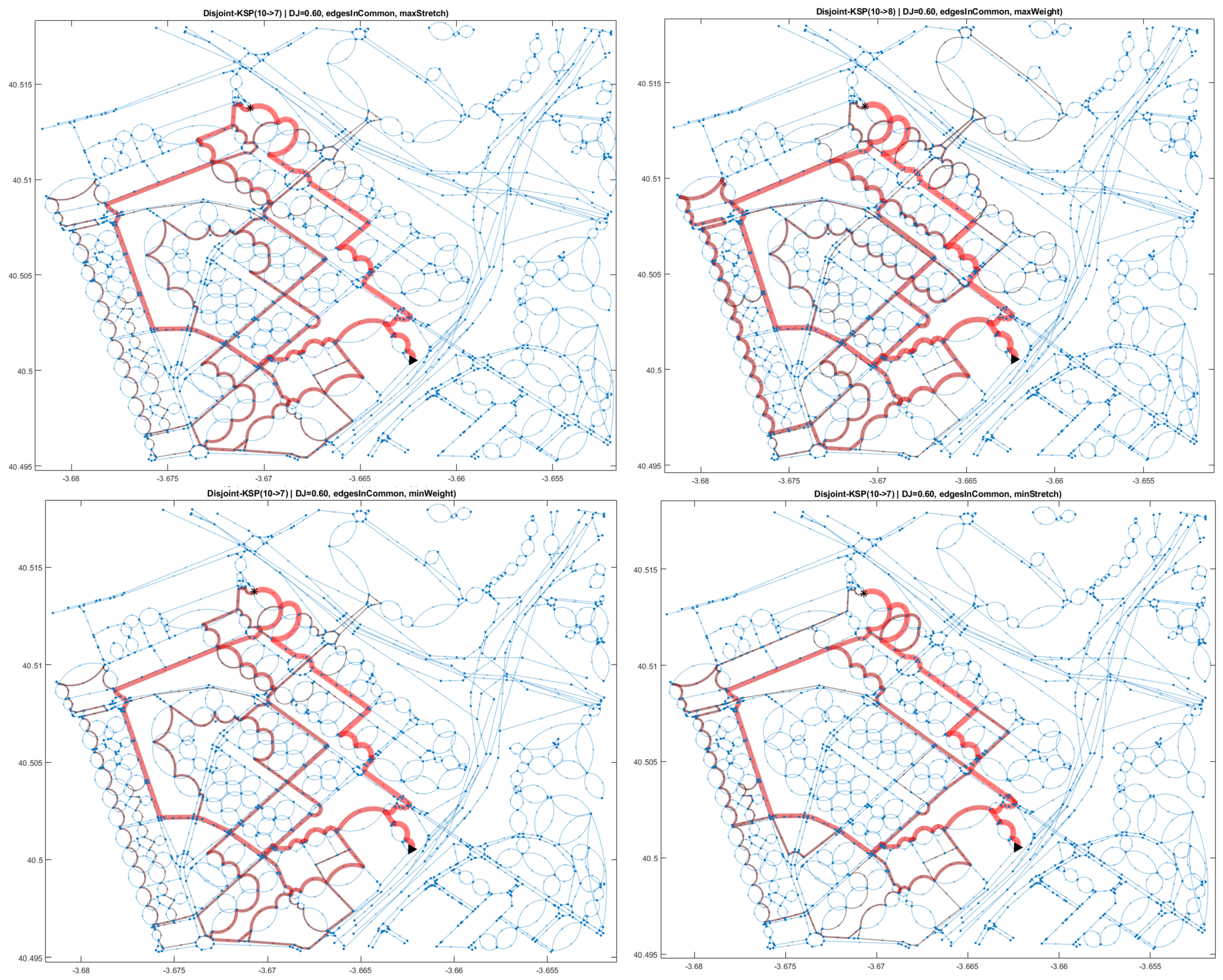
3.2. Semi-Disjoint K-Shortest Paths
- In Common-Edges similarity (12), ratio of the number of edges in common between both routes or versus the minimum number of links in both routes:
- Route-cost similarity (14), differential route cost ratio between the two routes and considering the minimum cost of both routes:
- Route-links number similarity (15), differential number of links ratio between the two routes and considering the minimum number of links in both routes:
- Smallest/largest free-flow edge weight , . If the MaxW is selected, the algorithm quickly selects highly disjoint paths though similar weighted paths are not considered. On the other hand, MinW enables a detailed full-scan approach.
- Minimum/maximum stretch, , where stretch relates to the relative weight link contribution to the shortest path.
- Least/most local shortest paths, considering the amount of shortest paths that include an edge.
3.3. TWM Model
| Listing 1. A map example showing edge weights and time validity intervals for the SUMO framework. |
| <twm id=“002” mapName=“Madrid–LasTablas” format=“sumo_1” version=“1.0”> <validity begin=“0” end=“2000” id=“time_001”> <edge id=“NodeA_NodeB” weight=“1.871288”/> <edge id=“NodeA_NodeC” weight=“2.508750”/> <edge id=“NodeA_NodeD” weight=“1.918288”/> ... <edge id=“NodeM_NodeJ” weight=“2.470722”/> <edge id=“NodeM_NodeL” weight=“2.176508”/> </validity> <validity begin=“2001” end=“4500” id=“time_002”> <edge id=“NodeA_NodeB” weight=“1.871288”/> <edge id=“NodeA_NodeC” weight=“3.882523”/> <edge id=“NodeA_NodeD” weight=“2.640266”/> ... <edge id=“NodeM_NodeJ” weight=“2.730023”/> <edge id=“NodeM_NodeL” weight=“2.176508”/> </validity> </twm> |
3.4. TWM Weights Generation Based on Dj-kSP
| Algorithm 1 TWM generation algorithm based on Dj-kSP |
1: 2: for all (d in D) do {iterate over commodities} 3: {Get Dj-kSP and their free-flow costs} 4: {Use ESX-C or similar algorithm} 5: 6: 7: {allocate maps} 8: for all (r in ) do {weight the maps} 9: {assign the initial network} 10: 11: for all ( in r) do {assign weights to path edges} 12: 13: end for 14: 15: for all ( in ) do {assign weights to the R-closest edges} 16: 17: end for 18: end for 19: 20: end for |
4. Optimal TWM Assignment
5. Materials and Methods
6. Results
- The number of K alternative paths considered for Dj-kSP. We vary on it, typically ranging between 3 and 10. Selecting a low K value will not create route variety, and using a higher number presumably is worthless as it will not find so many disjoint paths. Using a high K value has a significant performance penalty in the Dj-kSP algorithm with polynomial time complexity.
- The routing algorithm is used to calculate the minimum cost route. In this work, we use the Dijkstra algorithm as it will not significantly affect the resulting maps. The routing algorithm performance affects the overall performance as the traffic assignment used during the optimization stage uses it extensively.
- The disjoint level criteria used to evaluate the disjoint level of the paths. It is a traffic planning decision that conditions how routes are generated depending on the edge selection policy used. It is analyzed in the experimental section. This parameter also affects algorithm performance during the Dj-kSP calculation phase, as edge removal could take broader searches.
- The disjoint level threshold . We also vary it, with a typical value of 60%. This a traffic planning decision, where a high value of disjointness (>80%) probably will not produce the necessary variety of alternative routes, and a low value (<30%) will generate very overlapping routes. The combination of and K directly affects the number of Dj-kSP and, consequently, the path flows to be obtained since there may not be enough alternative paths that meet the maximum overlap constraints.
- The similarity criterion (max/min Stretch, max/min Weight, max/min Crossing Paths) affects the performance of Dj-kSP calculation and the effectiveness of the routes found. Also, depending on the selected criterion, the ESX-C algorithm finds different paths or restricts the ones found. Our experiments and the findings described by [16] suggest using the maxStretch or the maxWeight edge-removal criteria as they lead to better assignment.
- The distance of surrounding nodes to the nodes of each path flow, to define the routing areas. It should be greater than 1 to find some routing alternative; a typical value ranges from 2 to 5 connected nodes. It is possible to use higher values, but the routing areas probably would overlap, losing the disjointness properties. It does not affect the algorithm’s performance.
- The different utility functions for the vehicle fleets. This item is not considered in the scope of this work.
- The adherence factor (18) of the vehicles using TWM.
- The own GA resolution parameters.
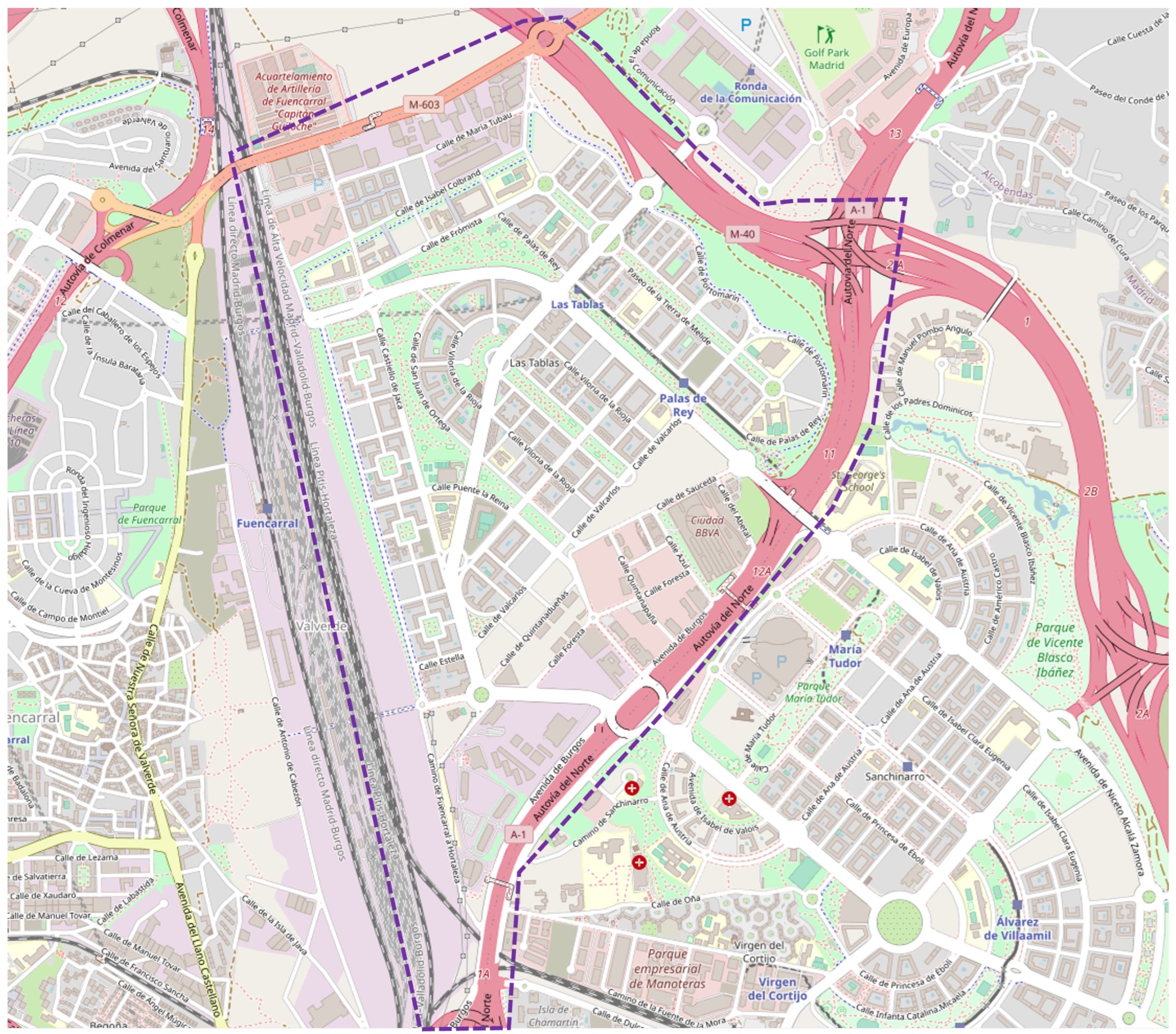
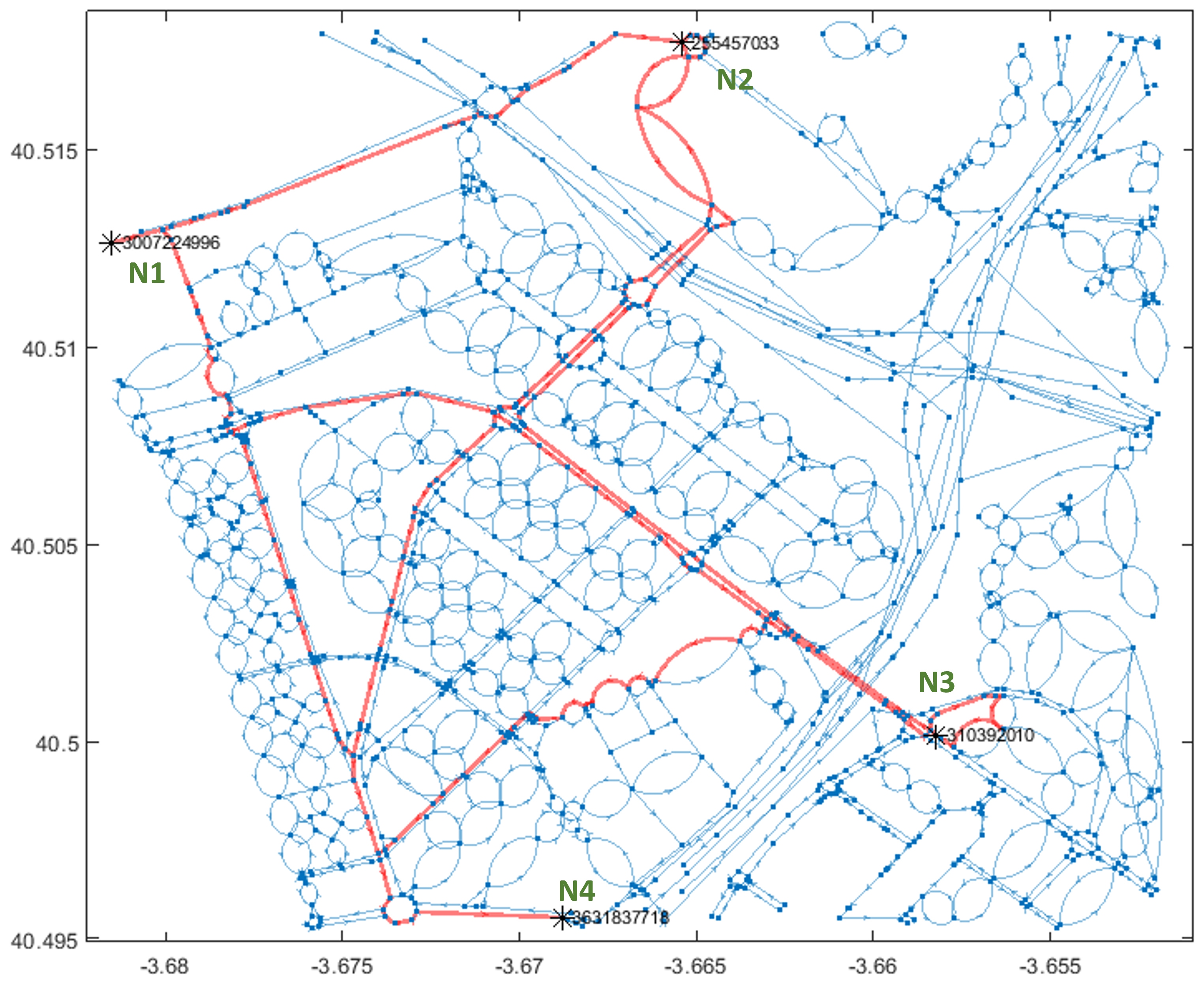
6.1. Madrid-Las Tablas Traffic Scenario (MLT)
Dj-kSP TWM Maps Generation
6.2. TWM Assignment and Routing Strategies
- Free-Flow and All-Or-Nothing to obtain the minimum and maximum assignment values as discussed in previous sections.
- Ideal routing solutions for MTTS in hypothetical scenarios that do not use TWM and, thus, no adherence to them is considered. They are included for:
- kSP(u)
- When the vehicles use the most straightforward k-shortest paths (not considering disjoint level) for each flow and use a random uniform assignment under AON conditions. The scenario is unrealistic as it does not reflect the selfish behavior of the routing agents.
- kSP(f)
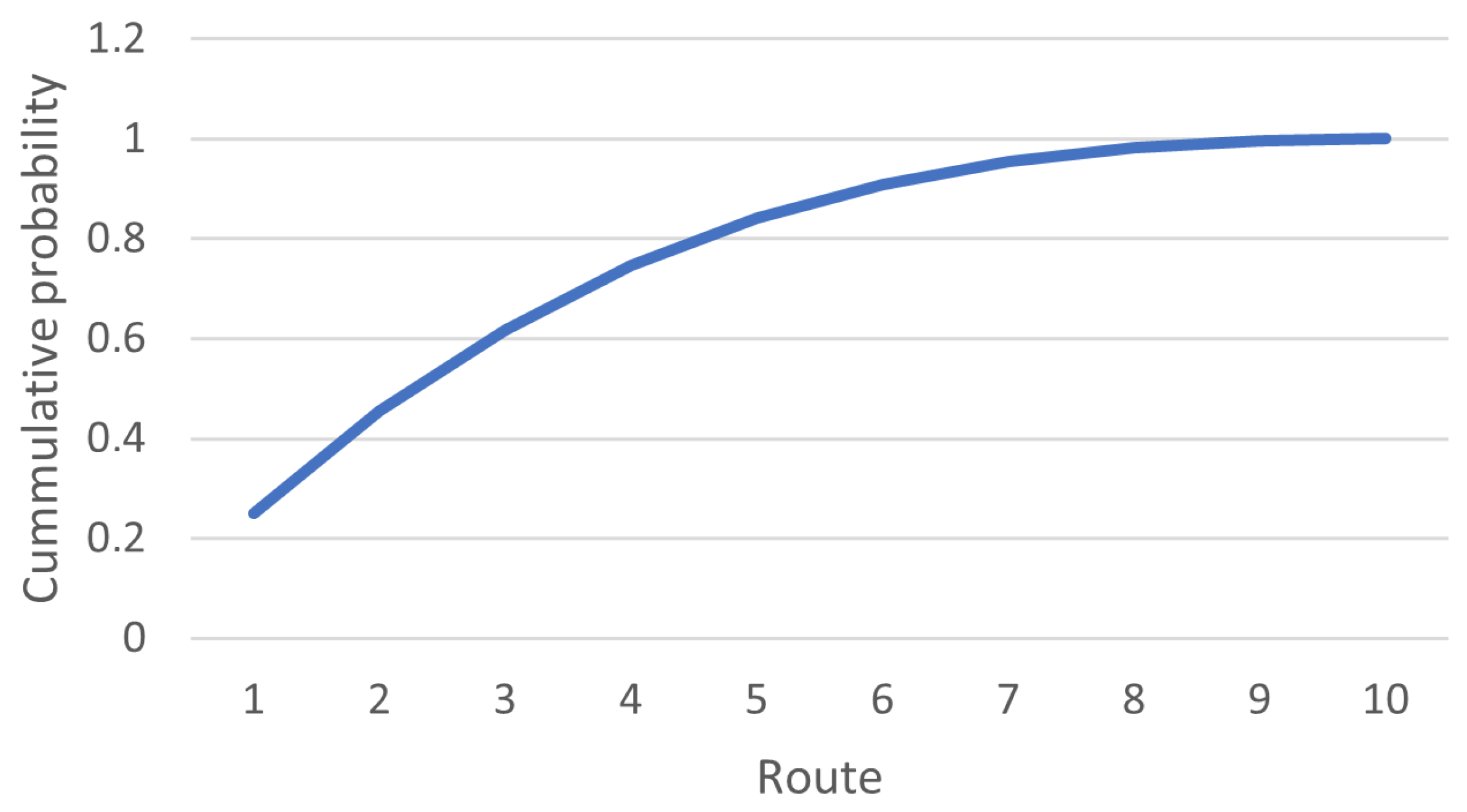
- When the vehicles use the simplest k-shortest paths (not considering disjoint level) for each flow and a random Fibonacci-based assignment for them shown in Figure 7. This Fibonacci series emulates a procedure to incrementally assign kSP routes to the vehicles.
- Dj-kSP(f)
- When the vehicles directly use the Dj-kSP routes for each flow with the random Fibonacci-based assignment.
- Dj-kSP(opt)
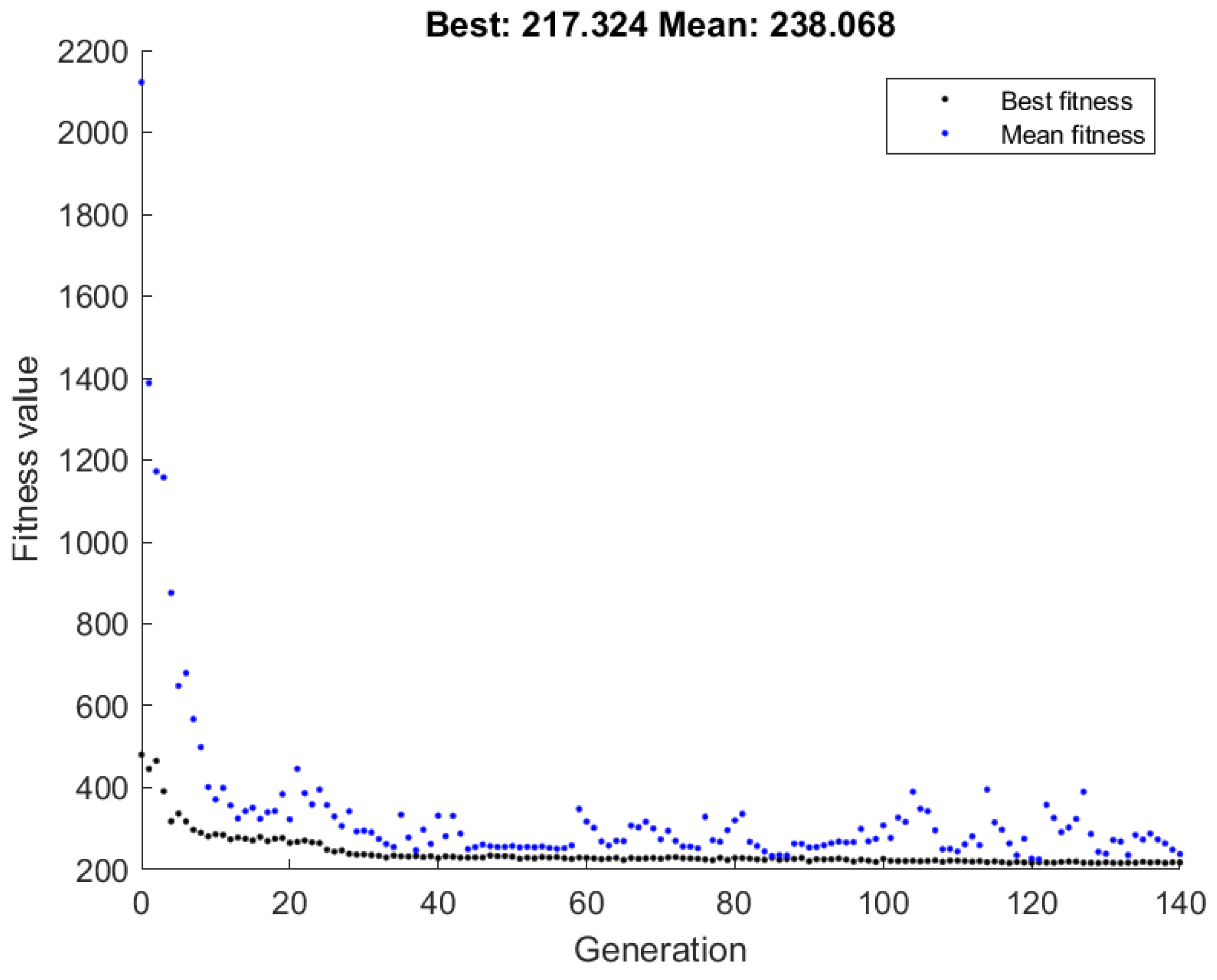
- When the vehicles directly use the Dj-kSP routes for each flow, calculating an optimal assignment. This optimal assignment is achieved using a GA engine.
- Usage of Dj-kSP-based TWM, based on different adherences in the routing agents.
- -TWM(f)
- When the vehicles use the TWM maps with a adherence ratio and a random distribution (uniform or Fibonacci) for assignment.
- -TWM(opt)
- When the vehicles use the TWM maps with a adherence ratio and an optimal assignment with UCTV algorithm. It is our main objective.
UCTV Parameterization
7. Discussion
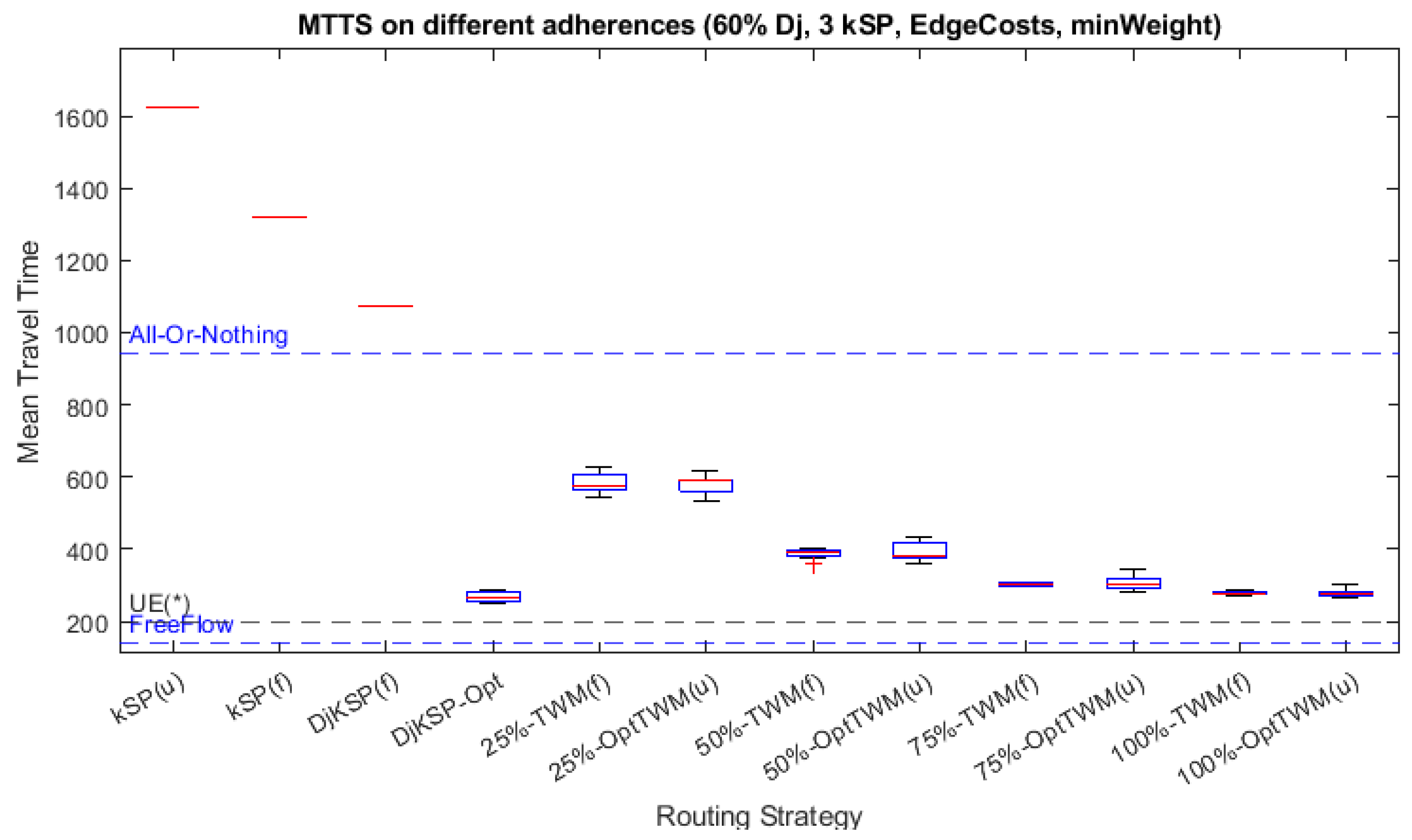
7.1. Effects of Driver’s Adherence to TWM
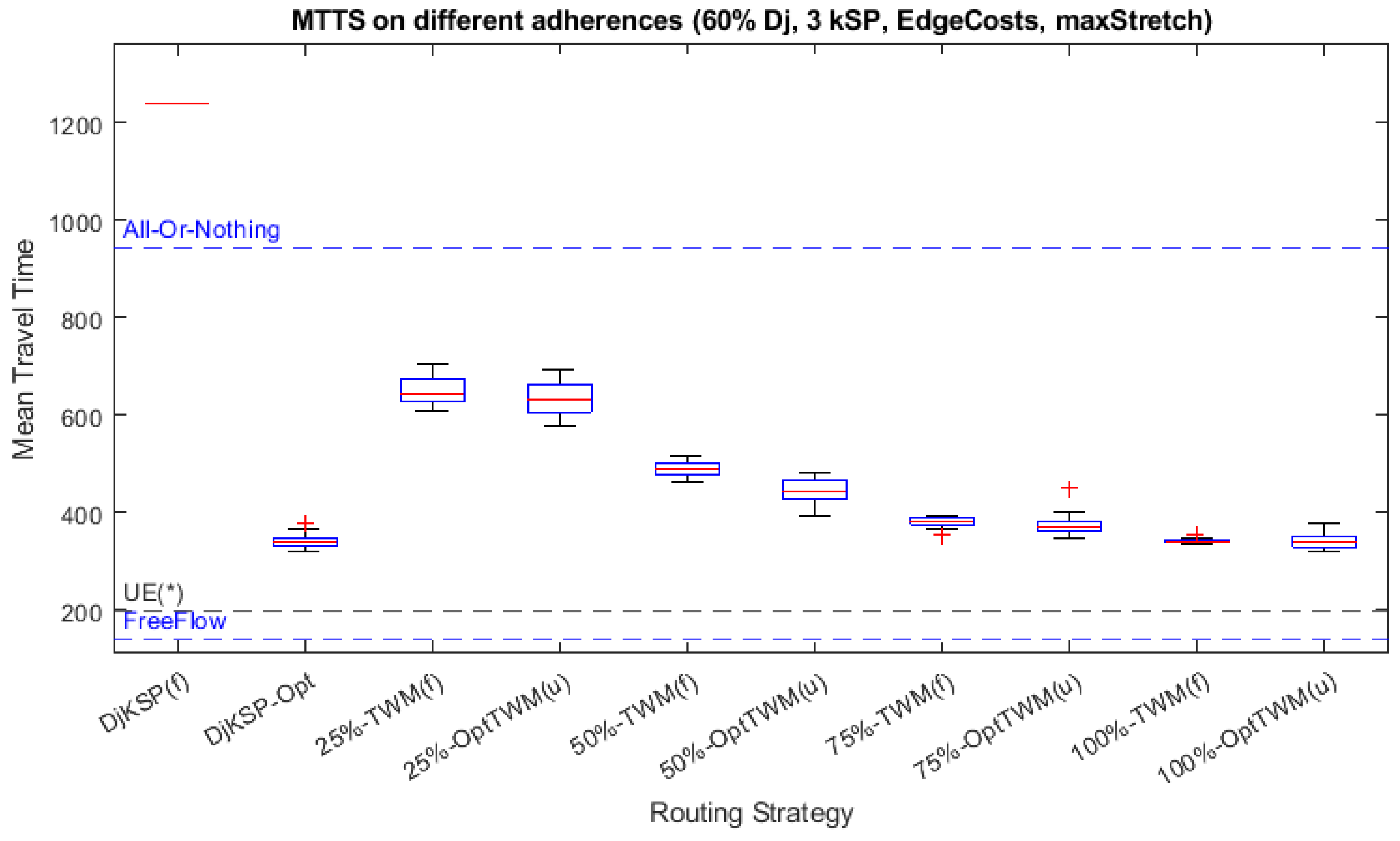
7.2. Effects of Edge Removal Criterion
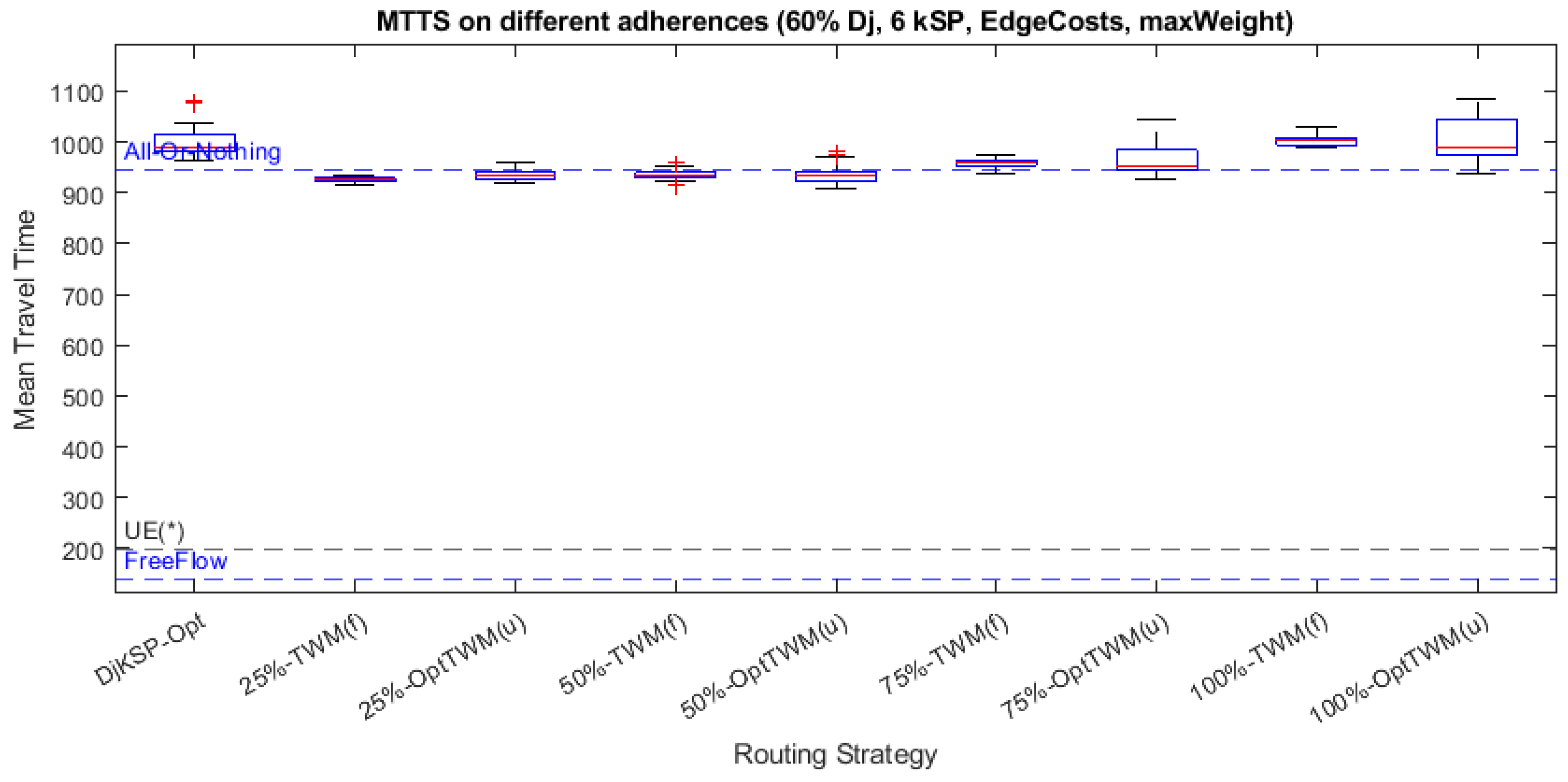
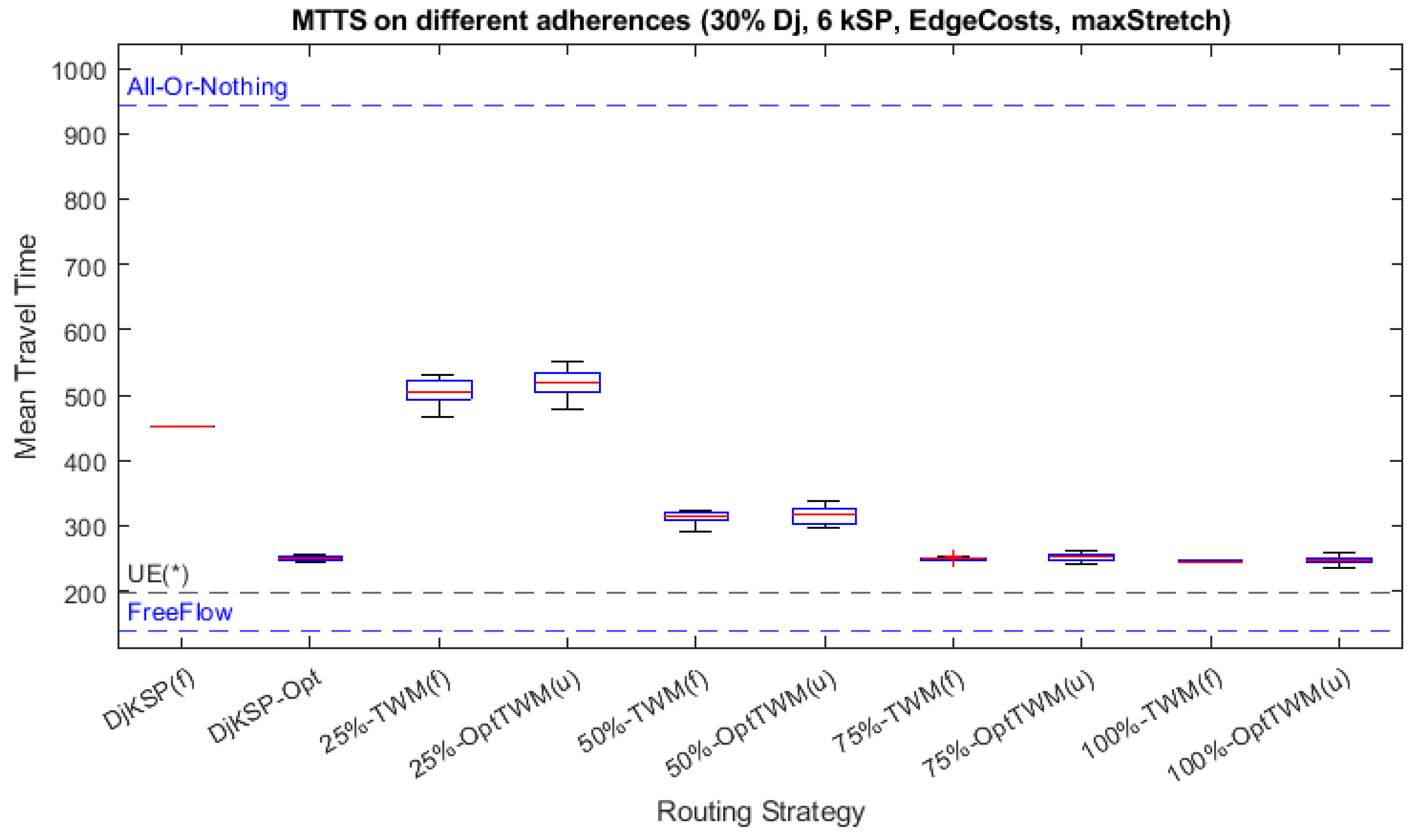
7.3. Effects of Disjoint Level Threshold
8. Conclusions
- Presents an integrated traffic planning model that is both expandable and open.
- Facilitates traffic categorization, applicable to various scenarios and groups: electric vehicles, pay-to-drive and car-sharing fleets, commercial distribution, individuals with disabilities, pollution considerations, hazardous transport, weather-based routing, timetables, and others.
- Features continuous enrichment and self-learning capabilities, and is compatible with dynamic traffic assignment and management.
- Driver decision capabilities are preserved to select the best route choice.
- Utilizes conventional optimization algorithms and techniques for route calculation.
- Leverages existing data sources like Smart-Cities and OpenData, while adding further value.
- Seamlessly integrates into present traffic control systems, introducing a novel routing module that utilizes distinct maps as defined by TWM. This incorporation does not necessitate extra infrastructure installation.
- Ensures compatibility with existing traffic agents from the user’s viewpoint, replacing the maps they currently employ.
- Requires no universal adoption by all vehicles; it can be selectively employed, potentially biasing its usage for specific categories or policies.
- Operates without reliance on V2V communications or the deployment of sensors, panels, or communication networks.
- Requires the figure of a network operator operating the ITS.
- It is a heuristic method as it induces driver and fleet behavior, and its results may be affected by the ITS that uses it.
- Under low traffic demands, its results have a low impact.
- Fairness and Equity: If specific drivers are given preferential treatment based on their utility requirements, it could potentially disadvantage others (routing unfairness). It is crucial to ensure that any differentiation is based on justifiable criteria and does not result in discrimination or unfair advantages for specific individuals or groups.
- Safety: Any traffic system’s primary objective should be ensuring all road users’ safety. Introducing differentiated traffic network views should not compromise safety standards. The system should prioritize factors such as avoiding congestion, minimizing accidents, and adhering to traffic laws, rather than solely focusing on individual utility requirements.
- Efficiency and Network Performance: A well-functioning traffic network benefits everyone by reducing travel times, congestion, and environmental impact. By tailoring traffic network views to individual drivers’ utility requirements, it may be possible to optimize overall network performance. However, this approach should not come at the expense of fairness, safety, or the public interest.
- Data Privacy and Security: It is crucial to ensure that personal information is protected and used responsibly. Using traffic flows enables this. Informed driver consent to use the system should be addressed.
- Transparency and Accountability: The traffic system operator must be transparent about the principles and algorithms used to differentiate traffic network views. The decision-making process should be clear, and drivers should be able to understand and challenge the system’s outcomes. Accountability mechanisms should be in place to address any potential biases or errors in the system.
Future Works
- Multi-objective optimization, considering not only total travel time and mean total travel time but also other indicators.
- Path flows could be segmented by k-shortest paths and vehicle fleets, considering them as sub-flows, using cost functions based on fleet utility models.
- Creating ad hoc dynamic TWM for just-congested areas.
- Using not only alpha-scaling of kSP but also an optimization of the TWM weights. It would lead to a double-step algorithm where (1) optimal TWM is created considering the whole traffic demand, and (2) optimal TWM distribution is finished.
- TWM application for transit traffic and multi-modal transportation.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| ABM | Activity-Based Model |
| BPR | The American Bureau of Public Roads |
| CAM | Cumulative Assignment Method |
| CSO | Constrained System Optimum |
| Dj-kSP | (Semi) Disjoint K-Shortest Paths |
| DTA | Dynamic Traffic Assignment |
| ETSI | European Telecommunications Standards Institute |
| GA | Genetic Algorithms |
| GHG | Greenhouse gas emissions |
| ITS | Intelligent Transportation Systems |
| MSA | Mean Successive Averages Method |
| kSP | K-Shortest Paths |
| PoA | Price of Anarchy |
| SO | System Optimum |
| TAP | Traffic Assignment Problem |
| TBM | Trip-based Demand Model |
| TWM | Traffic Weighted Multi-Maps |
| UE | User Equilibrium |
| VDF | Volume-Delay Functions |
References
- USA-EPA. Carbon Pollution from Transportation. Overviews and Factsheets. Available online: https://www.epa.gov/transportation-air-pollution-and-climate-change/carbon-pollution-transportation (accessed on 3 April 2023).
- European Union. Clean Transport, Urban Transport: Urban Mobility. Available online: https://ec.europa.eu/transport/themes/urban/urban_mobility_en (accessed on 1 June 2021).
- European Climate, Infrastructure and Environment Executive Agency. Transport Infrastructure. Available online: https://cinea.ec.europa.eu/programmes/connecting-europe-facility/transport-infrastructure_en (accessed on 3 April 2023).
- Patriksson, M. The Traffic Assignment Problem: Models and Methods; Dover Publications Inc.: Mineola, NY, USA, 2015; ISBN 978-0-486-78790-9. [Google Scholar]
- Ortuzar, J.d.D.; Willumsen, L.G. Modelling Transport, 3rd ed.; John Wiley & Sons: Hoboken, NJ, USA, 2001; ISBN 978-1119282358. [Google Scholar]
- Chow, J.; Recker, W. Informed Urban Transport Systems: Classic and Emerging Mobility Methods toward Smart Cities, 1st ed.; Elsevier: Amsterdam, The Netherlands, 2018. [Google Scholar] [CrossRef]
- Szeto, W.; Wang, S. Dynamic Traffic Assignment: Model Classifications and Recent Advances in Travel Choice Principles. Cent. Eur. J. Eng. 2011, 2, 1–18. [Google Scholar] [CrossRef]
- Paricio, A.; Lopez-Carmona, M.A. Urban Traffic Routing Using Weighted Multi-Map Strategies. IEEE Access 2019, 7, 153086–153101. [Google Scholar] [CrossRef]
- Yang, X.S. Ch.6-Genetic Algorithms. In Nature-Inspired Optimization Algorithms, 2nd ed.; Yang, X.S., Ed.; Academic Press: Cambridge, MA, USA, 2021; pp. 91–100. [Google Scholar] [CrossRef]
- Mathworks. MatLab-Genetic Algorithm Options-MATLAB & Simulink. Available online: https://www.mathworks.com/help/gads/genetic-algorithm-options.html#f6633 (accessed on 16 May 2020).
- Loder, A.; Ambühl, L.; Menendez, M.; Axhausen, K.W. Understanding Traffic Capacity of Urban Networks. Sci. Rep. 2019, 9, 16283. [Google Scholar] [CrossRef] [PubMed]
- Paricio-Garcia, A.; Lopez-Carmona, M.A. Traffic Assignment Optimization Using Flow-Based Multi-maps. In Advances in Practical Applications of Agents, Multi-Agent Systems, and Cognitive Mimetics. The PAAMS Collection; Mathieu, P., Dignum, F., Novais, P., De la Prieta, F., Eds.; Springer Nature Switzerland: Cham, Switzerland, 2023; pp. 237–248. [Google Scholar] [CrossRef]
- Suurballe, J. Disjoint Paths in a Network. Networks 1974, 4, 125–145. [Google Scholar] [CrossRef]
- Eilam, T. The Disjoint Shortest Paths Problem. Discret. Appl. Math. 1998, 85, 113–138. [Google Scholar] [CrossRef]
- Paricio, A.; Lopez-Carmona, M.A. Application of Traffic Weighted Multi-Map Optimization Strategies to Traffic Assignment. IEEE Access 2021, 9, 28999–29019. [Google Scholar] [CrossRef]
- Chondrogiannis, T.; Bouros, P.; Gamper, J.; Leser, U.; Blumenthal, D. Finding K-Shortest Paths with Limited Overlap. VLDB J. 2020, 29, 1023–1047. [Google Scholar] [CrossRef]
- Chondrogiannis, T.; Bouros, P.; Gamper, J.; Leser, U.; Blumenthal, D.B. Finding K-Dissimilar Paths with Minimum Collective Length. In Proceedings of the 26th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Seattle, WA, USA, 6–9 November 2018; pp. 404–407. [Google Scholar] [CrossRef]
- Sidhu, D.; Nair, R.; Abdallah, S. Finding Disjoint Paths in Networks. In Proceedings of the Conference on Communications Architecture & Protocols, Zurich, Switzerland, 1 August 1991; Volume 21, pp. 43–51. [Google Scholar] [CrossRef]
- Wei, W.; Hu, L.; Wu, Q.; Ding, T. Efficient Computation of User Optimal Traffic Assignment via Second-Order Cone and Linear Programming Techniques; IEEE: Piscataway, NJ, USA, 2019; pp. 137010–137019. [Google Scholar] [CrossRef]
- Sheffi, Y. Urban Transportation Networks: Equilibrium Analysis with Mathematical Programming Methods; Prentice-Hall: Hoboken, NJ, USA, 1984; ISBN 0-13-939729-9. [Google Scholar]
- Ceder, A. Public Transit Planning and Operation: Modeling, Practice and Behavior; CRC Press: Boca Raton, FL, USA, 2015. [Google Scholar] [CrossRef]
- Ceder, A.A.; Jiang, Y. Route Guidance Ranking Procedures with Human Perception Consideration for Personalized Public Transport Service. Transp. Res. Part C Emerg. Technol. 2020, 118, 102667. [Google Scholar] [CrossRef]
- Wardrop, J.; Whitehead, J. Correspondence. Some Theoretical Aspects of Road Traffic Research. Proc. Inst. Civ. Eng. 1952, 1, 767–768. [Google Scholar] [CrossRef]
- Bazzan, A.L.C.; Cagara, D.; Scheuermann, B. An Evolutionary Approach to Traffic Assignment. In Proceedings of the 2014 IEEE Symposium on Computational Intelligence in Vehicles and Transportation Systems, Orlando, FL, USA, 9–12 December 2014; IEEE: Orlando, FL, USA, 2014; pp. 43–50. [Google Scholar] [CrossRef]
- Chiu, Y.C.; Bottom, J.; Mahut, M.; Paz, A.; Balakrishna, R.; Waller, T.; Hicks, J. Dynamic Traffic Assignment: A Primer. In Transportation Research Board; E-Circular: Washington, DC, USA, 2011; ISSN 0097-8515. [Google Scholar]
- Koutsoupias, E.; Papadimitriou, C. Worst-Case Equilibria. In STACS 99; Meinel, C., Tison, S., Eds.; Springer: Berlin/Heidelberg, Germany, 1999; pp. 404–413. ISBN 978-3-540-49116-3. [Google Scholar]
- Lujak, M.; Giordani, S.; Ossowski, S. Route Guidance: Bridging System and User Optimization in Traffic Assignment. Neurocomputing 2014, 151, 449–460. [Google Scholar] [CrossRef]
- Mirchandani, P.; Soroush, H. Generalized Traffic Equilibrium with Probabilistic Travel Times and Perceptions. Transp. Sci. 1987, 21, 133–152. [Google Scholar] [CrossRef]
- Lo, H.; Luo, X.; Siu, B. Degradable Transport Network: Travel Time Budget of Travelers with Heterogeneous Risk Aversion. Transp. Res. Part B Methodol. 2006, 40, 792–806. [Google Scholar] [CrossRef]
- Watling, D. User Equilibrium Traffic Network Assignment with Stochastic Travel Times and Late Arrival Penalty. Eur. J. Oper. Res. 2006, 175, 1539–1556. [Google Scholar] [CrossRef]
- Avineri, E. The Effect of Reference Point on Stochastic Network Equilibrium. Transp. Sci. 2006, 40, 409–420. [Google Scholar] [CrossRef]
- Ramazani, H.; Shafahi, Y.; Seyedabrishami, S. A Fuzzy Traffic Assignment Algorithm Based on Driver Perceived Travel Time of Network Links. Sci. Iran. 2011, 18, 190–197. [Google Scholar] [CrossRef][Green Version]
- Miralinaghi, M.; Lou, Y.; Hsu, Y.T.; Shabanpour, R.; Shafahi, Y. Multiclass Fuzzy User Equilibrium with Endogenous Membership Functions and Risk-Taking Behaviors. J. Adv. Transp. 2016, 50, 1716–1734. [Google Scholar] [CrossRef]
- Paricio, A.; Lopez-Carmona, M.A. Modeling Driving Experience in Smart Traffic Routing Scenarios: Application to Traffic Multi-Map Routing. IEEE Access 2021, 9, 90170–90184. [Google Scholar] [CrossRef]
- Jahn, O.; Möhring, R.; Schulz, A.; Stier-Moses, N. System-Optimal Routing of Traffic Flows with User Constraints in Networks with Congestion. Oper. Res. 2004, 53, ii-743. [Google Scholar] [CrossRef]
- Schulz, A.; Stier-Moses, N. Efficiency and Fairness of System-Optimal Routing with User Constraints. Networks 2006, 48, 223–234. [Google Scholar] [CrossRef]
- Jalota, D.; Solovey, K.; Tsao, M.; Zoepf, S.; Pavone, M. Balancing Fairness and Efficiency in Traffic Routing via Interpolated Traffic Assignment. In Proceedings of the 21st International Conference on Autonomous Agents and Multiagent Systems; International Foundation for Autonomous Agents and Multiagent Systems: Richland, SC, USA, 2022; pp. 678–686. [Google Scholar] [CrossRef]
- Kanafani, A.; Al-Deek, H. A Simple Model for Route Guidance Benefits. Transp. Res. Part B Methodol. 1991, 25, 191–201. [Google Scholar] [CrossRef]
- Abou Senna, H.A. Investigating the Potential of Route Diversion through Its Application on an Orlando Transportation Network Using PARAMICS Simulation Model. Ph.D. Thesis, University of Central Florida, Orange County, FL, USA, 2003. [Google Scholar]
- Abou-Senna, H. Congestion Pricing Strategies to Investigate the Potential of Route Diversion on Toll Facilities Using En-Route Guidance. J. Traffic Transp. Eng. 2016, 3, 59–70. [Google Scholar] [CrossRef]
- Al-Deek, H.; Chandra, S.R.; Emam, E.B.; Klodzinski, J. Evaluating Effects of Toll Strategies on Route Diversion and Travel Times for Origin–Destination Pairs in a Regional Transportation Network. Transp. Res. Rec. 2007, 2035, 205–215. [Google Scholar] [CrossRef]
- Al-Deek, H.M.; Khattak, A.J.; Thananjeyan, P. A Combined Traveler Behavior and System Performance Model with Advanced Traveler Information Systems. Transp. Res. Part A Policy Pract. 1998, 32, 479–493. [Google Scholar] [CrossRef]
- Cheng, D.; Gkountouna, O.; Züfle, A.; Pfoser, D.; Wenk, C. Shortest-Path Diversification through Network Penalization: A Washington DC Area Case Study. In Proceedings of the 12th ACM SIGSPATIAL International Workshop, Chicago, IL, USA, 5 November 2019; ACM: New York, NY, USA, 2019; pp. 1–10. [Google Scholar] [CrossRef]
- Donnelly, R.; Erhardt, G.D.; Moeckel, R.; Davidson, W.A. Advanced Practices in Travel Forecasting: A Synthesis of Highway Practice. National Cooperative Highway Research Program Synthesis 406; Transportation Research Board, TRB: Washington, DC, USA, 2010; ISBN 978-0-309-43004-3. [Google Scholar]
- TPB’s Four-Step Travel Model—Travel Demand Modeling | Metropolitan Washington Council of Governments. Report. Available online: https://www.mathworks.com/products/fuzzy-logic.html (accessed on 11 April 2021).
- McNally, M.G. The Four-Step Model. In Handbook of Transport Modelling; Emerald Group Publishing Limited: Leeds, UK, 2007. [Google Scholar]
- Mathworks. Matlab’s Fuzzy Logic Toolbox. Available online: https://www.mathworks.com/products/fuzzy-logic.html (accessed on 11 April 2021).
- Li, L.; Cheema, M.A.; Lu, H.; Ali, M.E.; Toosi, A.N. Comparing Alternative Route Planning Techniques: A Comparative User Study on Melbourne, Dhaka and Copenhagen Road Networks. IEEE Trans. Knowl. Data Eng. 2022, 34, 5552–5557. [Google Scholar] [CrossRef]
- Akgün, V.; Erkut, E.; Batta, R. On Finding Dissimilar Paths. Eur. J. Oper. Res. 2000, 121, 232–246. [Google Scholar] [CrossRef]
- Chen, Y.; Bell, M.G.; Bogenberger, K. Reliable Pretrip Multipath Planning and Dynamic Adaptation for a Centralized Road Navigation System. IEEE Trans. Intell. Transp. Syst. 2007, 8, 14–20. [Google Scholar] [CrossRef]
- Kobitzsch, M.; Radermacher, M.; Schieferdecker, D. Evolution and Evaluation of the Penalty Method for Alternative Graphs. In 13th Workshop on Algorithmic Approaches for Transportation Modelling, Optimization, and Systems; Schloss Dagstuhl–Leibniz-Zentrum fuer Informatik: Dagstuhl, Germany, 2013; Volume 33, pp. 94–107. [Google Scholar] [CrossRef]
- Jones, A.H. Method of and Apparatus for Generating Routes; Cotares Ltd.: Cambridge, UK, 2012. [Google Scholar]
- Kobitzsch, M. An Alternative Approach to Alternative Routes: HiDAR. In Proceedings of the Algorithms–ESA 2013: 21st Annual European Symposium, Sophia Antipolis, France, 2–4 September 2013; pp. 613–624. [Google Scholar] [CrossRef]
- Häcker, C.; Bouros, P.; Chondrogiannis, T.; Althaus, E. Most Diverse Near-Shortest Paths; ACM: New York, NY, USA, 2021; p. 239. [Google Scholar] [CrossRef]
- Chondrogiannis, T.; Bouros, P.; Gamper, J.; Leser, U. Alternative Routing: K-Shortest Paths with Limited Overlap. In SIGSPATIAL’15: Proceedings of the 23rd SIGSPATIAL International; ACM: New York, NY, USA, 2015. [Google Scholar] [CrossRef]
- Bachtler, O.; Bergner, T.; Krumke, S. Almost Disjoint Paths and Separating by Forbidden Pairs. Available online: https://api.semanticscholar.org/CorpusID:247011962 (accessed on 15 November 2022).
- Robertson, N.; Seymour, P. Graph Minors. XIII. The Disjoint Paths Problem. J. Comb. Theory. Ser. B 1995, 63. [Google Scholar] [CrossRef]
- Bérczi, K.; Kobayashi, Y. The Directed Disjoint Shortest Paths Problem; The Egerváry Research Group: Budapest, Hungary, 2016; ISBN 1587-4451. [Google Scholar]
- Lochet, W. A Polynomial Time Algorithm for the K-Disjoint Shortest Paths Problem. In Proceedings of the 2021 ACM-SIAM Symposium on Discrete Algorithms (SODA), Virtual, 10–13 January 2021; Proceedings. Society for Industrial and Applied Mathematics SIAM: Philadelphia, PA, USA, 2021; pp. 169–178. [Google Scholar] [CrossRef]
- Abraham, I.; Delling, D.; Goldberg, A.V.; Werneck, R.F. Alternative Routes in Road Networks. J. Exp. Algorithmics 2013, 18, 1. [Google Scholar] [CrossRef]
- Chira, C.; Bazzan, A.L.C.; Rossetti, R.J.F. Multi-Objective Evolutionary Traffic Assignment. In Proceedings of the IEEE 18th International Conference on Intelligent Transportation Systems, ITSC 2015, Gran Canaria, Spain, 15–18 September 2015; pp. 1177–1182. [Google Scholar] [CrossRef]
- Pan, J.; Sandu Popa, I.; Zeitouni, K.; Borcea, C. Proactive Vehicular Traffic Rerouting for Lower Travel Time. IEEE Trans. Veh. Technol. 2013, 62, 3551–3568. [Google Scholar] [CrossRef]
- Angelelli, E.; Morandi, V.; Speranza, M. Minimizing the Total Travel Time with Limited Unfairness in Traffic Networks. Comput. Oper. Res. 2020, 123, 105016. [Google Scholar] [CrossRef]
- Division, B.U.P. Traffic Assignment Manual; Bureau of Public Roads, U.S. Department of Commerce: Washington, DC, USA, 1964. [Google Scholar]
- van-Essen, M.; Thomas, T.; van-Berkum, E.; Chorus, C. From User Equilibrium to System Optimum: A Literature Review on the Role of Travel Information, Bounded Rationality and Non-Selfish Behaviour at the Network and Individual Levels. Transp. Rev. 2016, 36, 1–22. [Google Scholar] [CrossRef]
- Dijkstra, E. A Note on Two Problems in Connexion with Graphs. Numer. Math. 1959, 1, 269–271. [Google Scholar] [CrossRef]
- Ji, Z.; Kim, Y.S.; Chen, A. Multi-Objective Alpha-Reliable Path Finding in Stochastic Networks with Correlated Link Costs: A Simulation-Based Multi-Objective Genetic Algorithm Approach (SMOGA). Expert Syst. Appl. 2011, 38, 1515–1528. [Google Scholar] [CrossRef]
- Reinhardt, L.B.; Pisinger, D. Multicriteria and Multi-Constrained Non-Additive Shortest Path Problems. Comput. Oper. Res. 2011, 38, 605–616. [Google Scholar] [CrossRef]
- Bell, M.G.H. Hyperstar: A Multi-Path Astar Algorithm for Risk Averse Vehicle Navigation. Transp. Res. Part B Methodol. 2009, 43, 97. [Google Scholar] [CrossRef]
- Behrisch, M.; Bieker, L.; Erdmann, J.; Krajzewicz, D. SUMO-Simulation of Urban MObility: An Overview. In SIMUL 2011, The Third International Conference on Advances in System Simulation; Omerovic, S.U.o.O.A., Simoni, R.I.R.T.P.D.A., Bobashev, R.I.R.T.P.G., Eds.; ThinkMind: Barcelona, Spain, 2011; pp. 63–68. ISBN 978-1-61208-169-4. [Google Scholar]
- Mathworks. MATLAB R23A. Available online: https://www.mathworks.com/products/matlab.html (accessed on 20 August 2023).
- OpenStreetMaps (OSM). Available online: https://www.openstreetmap.org (accessed on 25 September 2019).
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Commodities | ||||||
|---|---|---|---|---|---|---|
| Fleets | d | d | d | d | d | |
| q | ||||||
| q | ||||||
| q | ||||||
| q | ||||||
| Flow | Sub-Flow | Path Flow | ||
|---|---|---|---|---|
| 1 | 0.5 | |||
| 3 | 0.17 | |||
| 5 | 0.10 | |||
| 7 | 0.07 | |||
| 2 | 0.5 | |||
| 4 | 0.25 | |||
| 6 | 0.17 | |||
| 8 | 0.13 | |||
| 5 | 0.5 | |||
| 10 | 0.25 |
| Source/Destination | N1 | N2 | N3 | N4 |
|---|---|---|---|---|
| N1 | 500 | 500 | 500 | |
| N2 | 500 | 500 | ||
| N3 | 500 | 500 |
| Figure | Dj-kSP | Disjoint Criterion | Edge Policy | Adherences | Comments | |
|---|---|---|---|---|---|---|
| Figure 9 | 3 | Edge costs | 60% | minWeight | 25%, 50%, 75%, 100% | Compare with kSP assignment |
| Figure 10 | 3 | Edge costs | 60% | maxStretch | 25%, 50%, 75%, 100% | |
| Figure 11 | 6 | Edge costs | 60% | maxWeight | 25%, 50%, 75%, 100% | |
| Figure 12 | 6 | Edge costs | 30% | maxStretch | 25%, 50%, 75%, 100% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Paricio-Garcia, A.; Lopez-Carmona, M.A. Application of Traffic Weighted Multi-Maps Based on Disjoint Routing Areas for Static Traffic Assignment. Appl. Sci. 2023, 13, 10071. https://doi.org/10.3390/app131810071
Paricio-Garcia A, Lopez-Carmona MA. Application of Traffic Weighted Multi-Maps Based on Disjoint Routing Areas for Static Traffic Assignment. Applied Sciences. 2023; 13(18):10071. https://doi.org/10.3390/app131810071
Chicago/Turabian StyleParicio-Garcia, Alvaro, and Miguel A. Lopez-Carmona. 2023. "Application of Traffic Weighted Multi-Maps Based on Disjoint Routing Areas for Static Traffic Assignment" Applied Sciences 13, no. 18: 10071. https://doi.org/10.3390/app131810071
APA StyleParicio-Garcia, A., & Lopez-Carmona, M. A. (2023). Application of Traffic Weighted Multi-Maps Based on Disjoint Routing Areas for Static Traffic Assignment. Applied Sciences, 13(18), 10071. https://doi.org/10.3390/app131810071