
When Preschoolers Interact with an Educational Robot, Does Robot Feedback Influence Engagement?


Abstract
:
1. Introduction
1.1. Background
1.1.1. Engagement
1.1.2. Feedback
1.2. This Study
- (a)
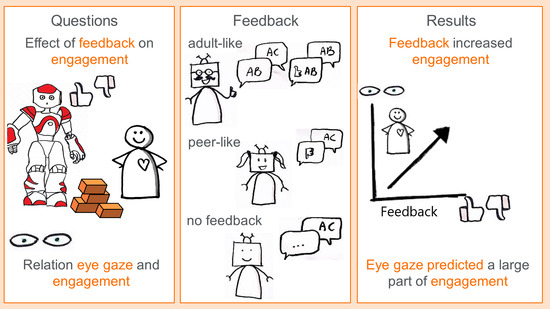
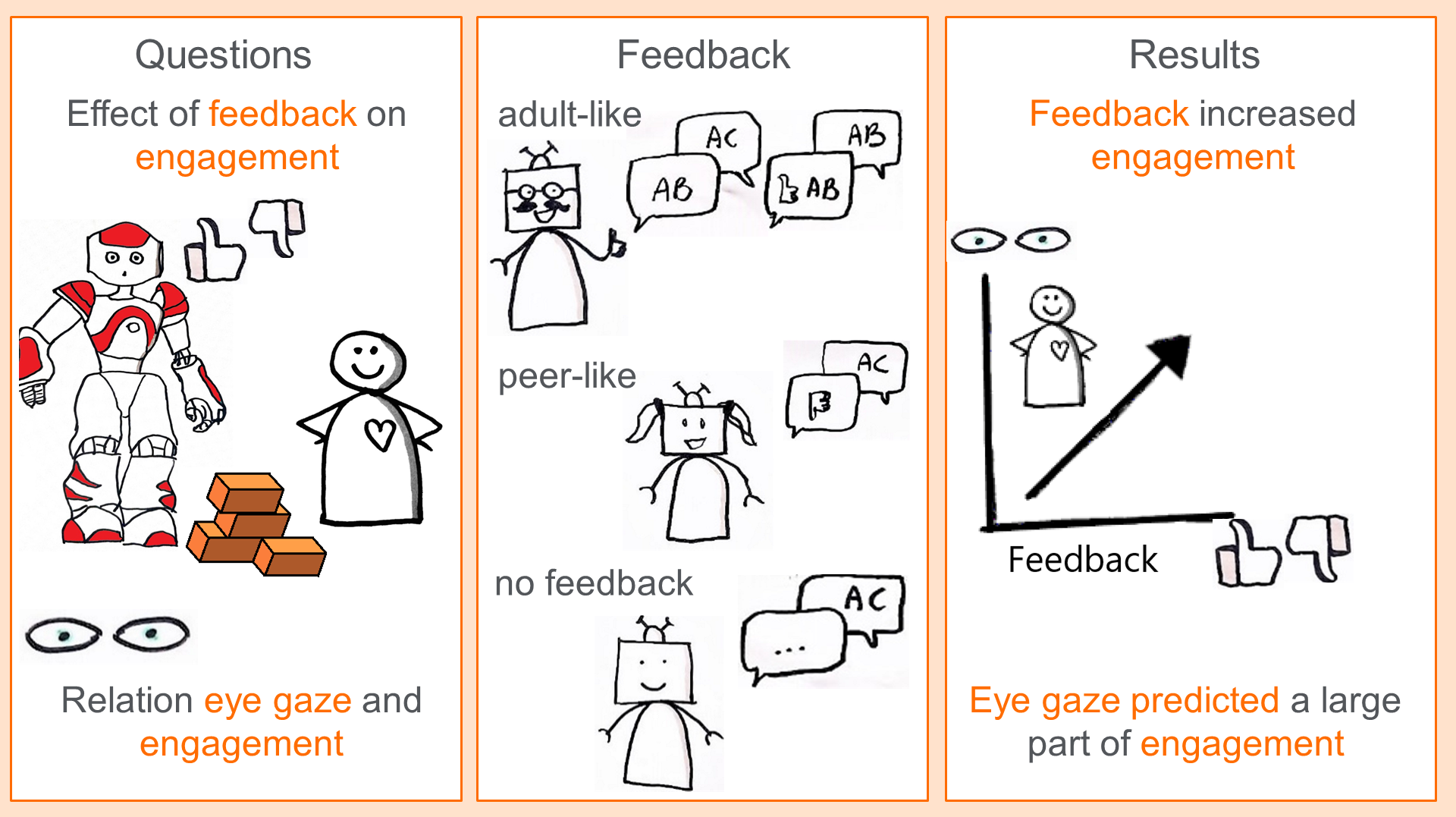
- Children are more task-engaged with a robot that provides feedback than with a robot that does not provide feedback.We expect that children’s task engagement will be higher when children receive feedback because the feedback will make them aware of their mistakes. This awareness can lead to a more successful completion of the task and children’s success will result in higher task engagement.
- (b)
- Children are more robot-engaged when the robot provides adult-like feedback than in the other two conditions. We expect this result because the adult-like feedback is the only condition that provides positive feedback, which is shown to increase children’s motivation and can increase children’s robot engagement [47,48]. We expect that this effect will mainly contribute to children’s robot engagement because the robot is providing the positive feedback and children might like the robot more due to these positive expressions.
- (a)
- Eye gaze toward the blocks and the robot has a positive relation with children’s task engagement and children’s eye gaze elsewhere has a negative relation with children’s task engagement.We expect that this is because the task involves both the robot as an instructor and the blocks because the children have to manipulate these blocks during the task.
- (b)
- Children’s eye gaze toward the robot will have a positive relation with robot engagement and the other eye-gaze directions will have a negative relation with robot engagement.We expect that only eye gaze toward the robot will have a positive relation with robot engagement, because when you communicate and, therefore, engage with a robot as a social partner, this is often accompanied by mutual eye gaze with this social partner [49] and other studies that detected disengagement with the robot [30,31,32] when participants looked away.
2. Method
2.1. Participants
- Adult-like feedback (, = 3 years and 6 months, 12 boys, 9 girls);
- Peer-like feedback (, = 3 years and 6 months, 10 boys, 8 girls);
- No feedback (, = 3 years and 7 months, 13 boys, 6 girls).
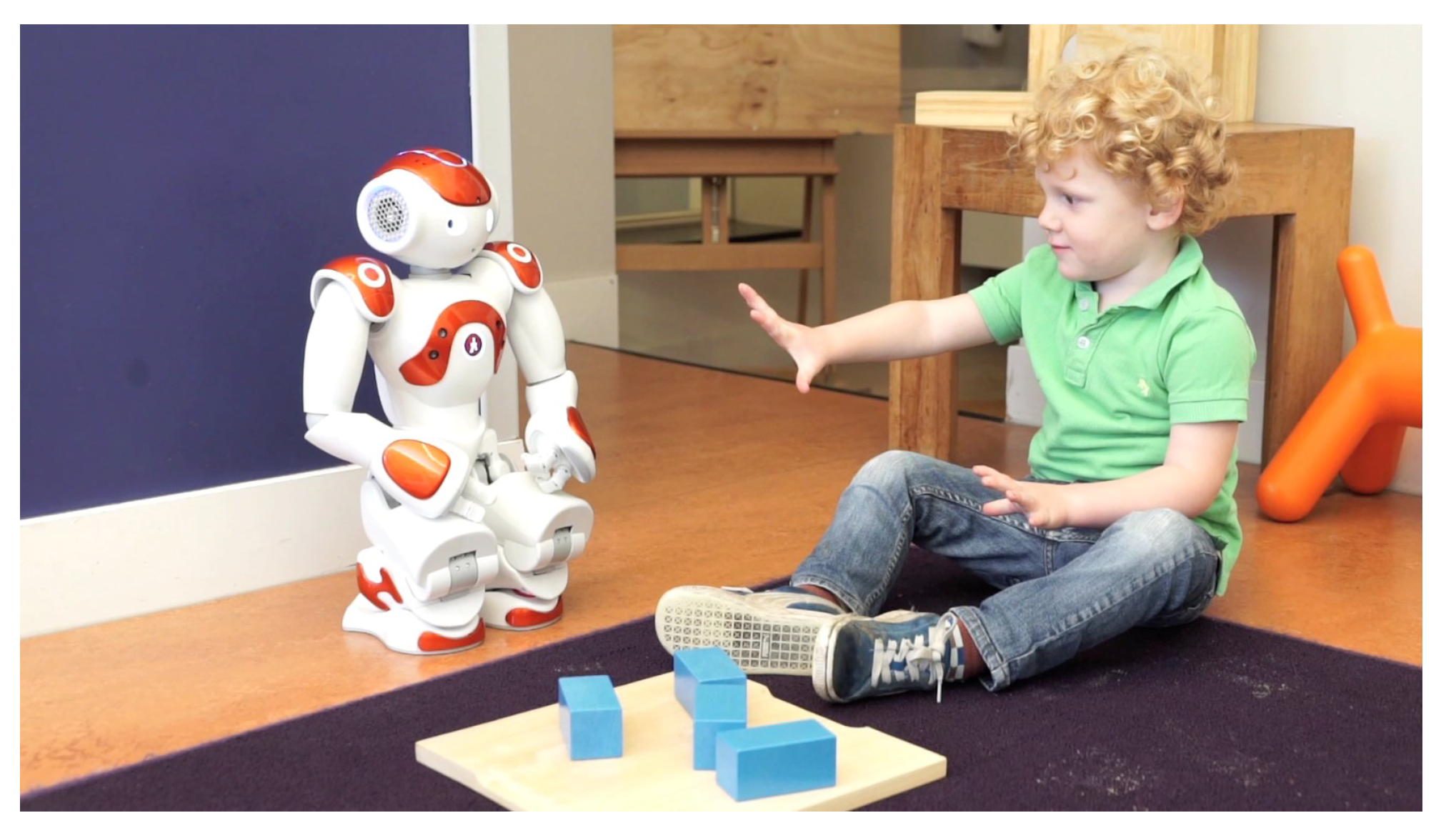
2.2. Robot Tutoring Lesson
2.3. Experimental Conditions
- In the adult-like feedback condition, the robot used explicit positive feedback for correct answers and implicit negative feedback for incorrect answers. A correct answer would invoke a facial expression using colored eye-LEDs and positive verbal feedback (“That is right, three means three in English”). For an incorrect answer, corrective feedback was provided (“three means three”). After receiving negative feedback, children could try again (“You should take three blocks”), after which the robot would again provide feedback. This negative feedback was, at most, provided twice for every target word, which means that during the experiment, every child was able to receive negative feedback eight times and positive feedback four times. In case the child gave more than two incorrect answers, the robot still provided positive feedback and continued to the next instruction. For both positive feedback and negative feedback, the robot repeated the English target word, which increased children’s exposure to the target words.
- In the peer-like feedback condition, the robot did not provide positive feedback but only provided explicit negative feedback. This explicit negative feedback was based on children’s feedback during peer interaction [50]. Similar to the adult-like feedback condition, children could try again twice after receiving negative feedback. After a correct answer, the robot would continue to the next step without any feedback.
- In the no feedback condition, the robot did not provide any feedback and just continued the game with the blocks after children collected the correct or incorrect number of blocks.
2.4. Materials
2.4.1. Experimental Setting
2.4.2. Pre-Test
2.4.3. Post-Test
2.5. Procedure
2.5.1. Group Introduction
2.5.2. Experiment
2.6. Engagement and Gaze Coding
2.6.1. Engagement Coding
2.6.2. Eye-Gaze Coding
2.7. Analyses
3. Results
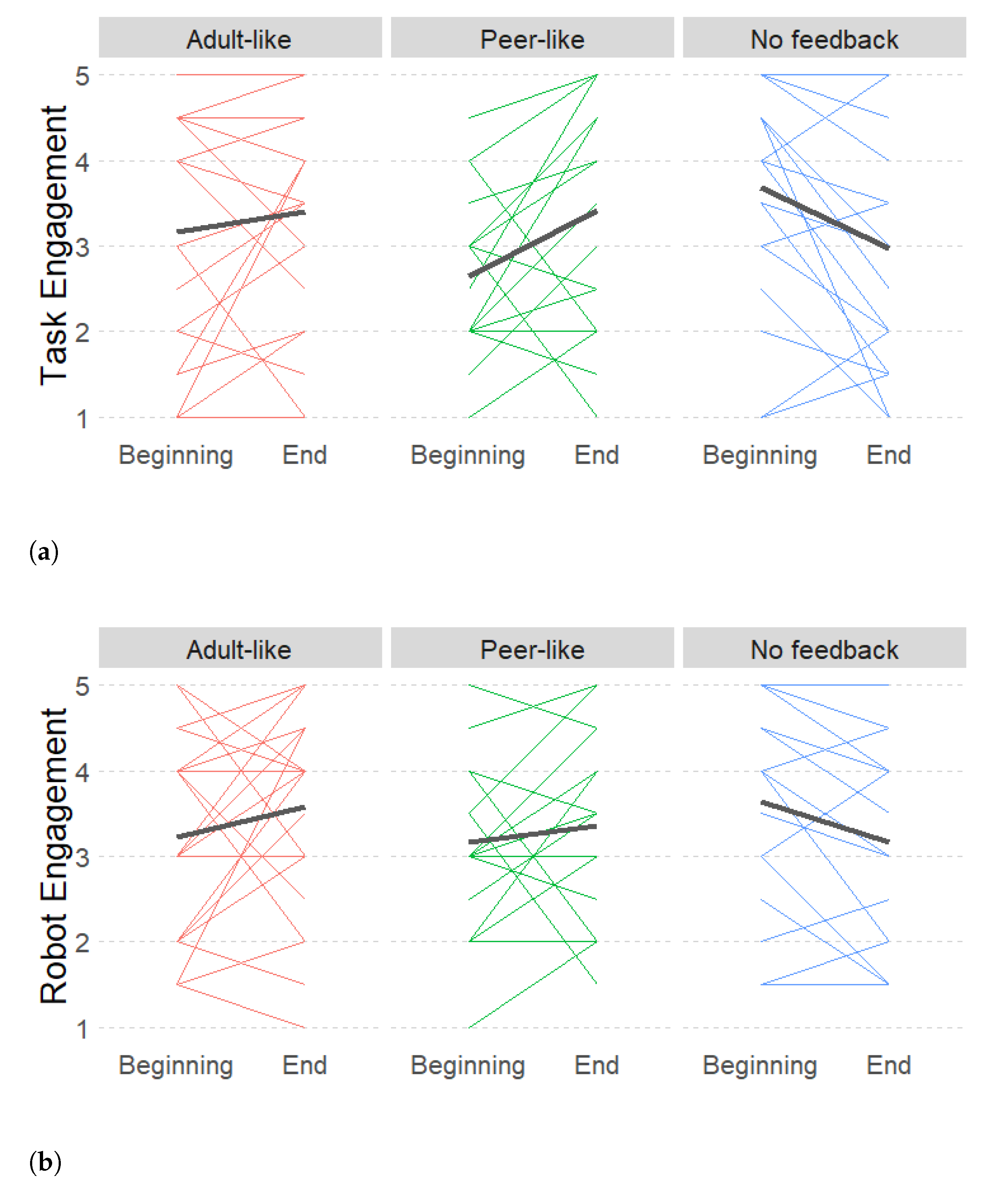
3.1. Engagement
3.1.1. Task Engagement
3.1.2. Robot Engagement
3.2. Duration of Eye-Gaze Directions as Engagement Predictor
3.2.1. Task Engagement
3.2.2. Robot Engagement
3.3. Learning Gain
3.4. Relation Learning Gain, Task Engagement and Robot Engagement
4. Discussion
4.1. Engagement
4.2. Duration of Eye-Gaze Directions as Engagement Predictor
4.3. Learning Gain
4.4. Individual Differences
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Belpaeme, T.; Vogt, P.; van den Berghe, R.; Bergmann, K.; Göksun, T.; de Haas, M.; Kanero, J.; Kennedy, J.; Küntay, A.C.; Oudgenoeg-Paz, O.; et al. Guidelines for designing social robots as second language tutors. Int. J. Soc. Robot. 2018, 10, 325–341. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- van den Berghe, R.; Verhagen, J.; Oudgenoeg-Paz, O.; van der Ven, S.; Leseman, P. Social Robots for Language Learning: A Review. Rev. Educ. Res. 2019, 89, 259–295. [Google Scholar] [CrossRef] [Green Version]
- Kanero, J.; Geçkin, V.; Oranç, C.; Mamus, E.; Küntay, A.C.; Göksun, T. Social Robots for Early Language Learning: Current Evidence and Future Directions. Child Dev. Perspect. 2018, 12, 146–151. [Google Scholar] [CrossRef] [Green Version]
- Roorda, D.L.; Koomen, H.M.Y.; Spilt, J.L.; Oort, F.J. The Influence of Affective Teacher–Student Relationships on Students’ School Engagement and Achievement: A Meta-Analytic Approach. Rev. Educ. Res. 2011, 81, 493–529. [Google Scholar] [CrossRef]
- Fredricks, J.A.; Blumenfeld, P.C.; Paris, A.H. School Engagement: Potential of the Concept, State of the Evidence. Rev. Educ. Res. 2004, 74, 59–109. [Google Scholar] [CrossRef] [Green Version]
- Oertel, C.; Castellano, G.; Chetouani, M.; Nasir, J.; Obaid, M.; Pelachaud, C.; Peters, C. Engagement in Human-Agent Interaction: An Overview. Front. Robot. AI 2020, 7, 92. [Google Scholar] [CrossRef]
- de Haas, M.; Vogt, P.; Krahmer, E. The Effects of Feedback on Children’s Engagement and Learning Outcomes in Robot-Assisted Second Language Learning. Front. Robot. AI 2020, 7, 101. [Google Scholar] [CrossRef]
- Kennedy, J.; Baxter, P.; Belpaeme, T. The Robot Who Tried Too Hard: Social Behaviour of a Robot Tutor Can Negatively Affect Child Learning. In Proceedings of the Tenth Annual ACM/IEEE International Conference on Human-Robot Interaction; Association for Computing Machinery: New York, NY, USA, 2015; pp. 67–74. [Google Scholar]
- Ahmad, M.I.; Mubin, O.; Shahid, S.; Orlando, J. Robot’s adaptive emotional feedback sustains children’s social engagement and promotes their vocabulary learning: A long-term child–robot interaction study. Adapt. Behav. 2019, 27, 243–266. [Google Scholar] [CrossRef]
- de Wit, J.; Schodde, T.; Willemsen, B.; Bergmann, K.; de Haas, M.; Kopp, S.; Krahmer, E.; Vogt, P. The Effect of a Robot’s Gestures and Adaptive Tutoring on Children’s Acquisition of Second Language Vocabularies. In Proceedings of the 2018 ACM/IEEE International Conference on Human-Robot Interaction; Association for Computing Machinery: New York, NY, USA, 2018; pp. 50–58. [Google Scholar] [CrossRef] [Green Version]
- Zaga, C.; Lohse, M.; Truong, K.P.; Evers, V. The Effect of a Robot’s Social Character on Children’s Task Engagement: Peer Versus Tutor. Social Robotics; Tapus, A., André, E., Martin, J.C., Ferland, F., Ammi, M., Eds.; Springer International Publishing: Cham, Switzerland, 2015; pp. 704–713. [Google Scholar] [CrossRef]
- Byrne, D. Techniques for Classroom Interaction; Longman: London, UK, 1987. [Google Scholar]
- Masgoret, A.M.; Gardner, R.C. Attitudes, motivation, and second language learning: A meta–analysis of studies conducted by Gardner and associates. Lang. Learn. 2003, 53, 123–163. [Google Scholar] [CrossRef]
- Flink, C.; Boggiano, A.K.; Main, D.S.; Barrett, M.; Katz, P.A. Children’s achievement-related behaviors: The role of extrinsic and intrinsic motivational orientations. Achiev. Motiv. 1992, 189–214. [Google Scholar]
- Mackey, A.; Oliver, R. Interactional feedback and children’s L2 development. System 2002, 30, 459–477. [Google Scholar] [CrossRef]
- Lyster, R.; Saito, K. Oral feedback in classroom SLA. Stud. Second. Lang. Acquis. 2010, 32, 265–302. [Google Scholar] [CrossRef] [Green Version]
- Mackey, A.; Oliver, R.; Leeman, J. Interactional input and the incorporation of feedback: An exploration of NS–NNS and NNS–NNS adult and Child Dyads. Lang. Learn. 2003, 53, 35–66. [Google Scholar] [CrossRef]
- Oliver, R. Age differences in negotiation and feedback in classroom and pairwork. Lang. Learn. 2000, 50, 119–151. [Google Scholar] [CrossRef]
- D’Mello, S.; Graesser, A. Dynamics of affective states during complex learning. Learn. Instr. 2012, 22, 145–157. [Google Scholar] [CrossRef]
- Sidner, C.L.; Lee, C.; Kidd, C.D.; Lesh, N.; Rich, C. Explorations in engagement for humans and robots. Artif. Intell. 2005, 166, 140–164. [Google Scholar] [CrossRef] [Green Version]
- Trowler, V. Student engagement literature review. High. Educ. Acad. 2010, 11, 1–15. [Google Scholar]
- Zaga, C.; Truong, K.P.; Lohse, M.; Evers, V. Exploring child-robot engagement in a collaborative task. In Child-Robot Interaction Workshop: Social Bonding, Learning and Ethics; Instituto de Engenharia de Sistemas e Computadores, Investigação e desenvolvimento em Lisboa (INESC-ID): Porto, Portugal, 2014; p. 3. [Google Scholar]
- Tanaka, F.; Matsuzoe, S. Children teach a care-receiving robot to promote their learning: Field experiments in a classroom for vocabulary learning. J. Hum. Robot. Interact. 2012, 1, 78–95. [Google Scholar] [CrossRef]
- Kanda, T.; Hirano, T.; Eaton, D.; Ishiguro, H. Interactive robots as social partners and peer tutors for children: A field trial. Hum. Comput. Interact. 2004, 19, 61–84. [Google Scholar]
- Leite, I.; Castellano, G.; Pereira, A.; Martinho, C.; Paiva, A. Empathic robots for long-term interaction. Int. J. Soc. Robot. 2014, 6, 329–341. [Google Scholar] [CrossRef]
- Kory-Westlund, J.M.; Dickens, L.; Jeong, S.; Harris, P.L.; deSteno, D.; Breazeal, C.L. Children use non-verbal cues to learn new words from robots as well as people. Int. J. Child Comput. Interact. 2017, 13, 1–9. [Google Scholar] [CrossRef]
- Chen, H.; Park, H.W.; Breazeal, C. Teaching and learning with children: Impact of reciprocal peer learning with a social robot on children’s learning and emotive engagement. Comput. Educ. 2020, 150, 103836. [Google Scholar] [CrossRef]
- de Wit, J.; Brandse, A.; Krahmer, E.; Vogt, P. Varied Human-Like Gestures for Social Robots: Investigating the Effects on Children’s Engagement and Language Learning. In Proceedings of the ACM/IEEE International Conference on Human-Robot Interaction, New York, NY, USA, 23–26 March 2020. [Google Scholar]
- Inoue, K.; Lala, D.; Takanashi, K.; Kawahara, T. Engagement recognition by a latent character model based on multimodal listener behaviors in spoken dialogue. APSIPA Trans. Signal Inf. Process. 2018, 7, e9. [Google Scholar] [CrossRef] [Green Version]
- Rich, C.; Ponsleur, B.; Holroyd, A.; Sidner, C.L. Recognizing Engagement in Human-Robot Interaction. In Proceedings of the 5th ACM/IEEE International Conference on Human-Robot Interaction, Osaka, Japan, 2–5 March 2010; pp. 375–382. [Google Scholar]
- Ishii, R.; Ooko, R.; Nakano, Y.I.; Nishida, T. Effectiveness of Gaze-Based Engagement Estimation in Conversational Agents. In Eye Gaze in Intelligent User Interfaces: Gaze-Based Analyses, Models and Applications; Nakano, Y.I., Conati, C., Bader, T., Eds.; Springer: London, UK, 2013; pp. 85–110. [Google Scholar] [CrossRef]
- Nakano, Y.I.; Ishii, R. Estimating User’s Engagement from Eye-gaze Behaviors in Human-agent Conversations. In Proceedings of the 15th International Conference on Intelligent User Interfaces; ACM: New York, NY, USA, 2010; pp. 139–148. [Google Scholar]
- Mackey, A.; Silver, R.E. Interactional tasks and English L2 learning by immigrant children in Singapore. System 2005, 33, 239–260. [Google Scholar] [CrossRef]
- Lyster, R.; Ranta, L. Corrective Feedback and Learner Uptake: Negotiation of Form in Communicative Classrooms. Stud. Second. Lang. Acquis. 1997, 19, 37–66. [Google Scholar] [CrossRef]
- Oxford, R.; Shearin, J. Language learning motivation: Expanding the theoretical framework. Mod. Lang. J. 1994, 78, 12–28. [Google Scholar] [CrossRef]
- Dörnyei, Z. Motivation in second and foreign language learning. Lang. Teach. 1998, 31, 117–135. [Google Scholar] [CrossRef]
- Mashburn, A.J.; Justice, L.M.; Downer, J.T.; Pianta, R.C. Peer effects on children’s language achievement during pre-kindergarten. Child Dev. 2009, 80, 686–702. [Google Scholar] [CrossRef] [PubMed]
- Okita, S.Y.; Schwartz, D.L. Learning by teaching human pupils and teachable agents: The importance of recursive feedback. J. Learn. Sci. 2013, 22, 375–412. [Google Scholar] [CrossRef] [Green Version]
- Midden, C.; Ham, J. The Power of Negative Feedback from an Artificial Agent to Promote Energy Saving Behavior. In International Conference of Design, User Experience, and Usability; Springer: Berlin/Heidelberg, Germany, 2014; pp. 328–338. [Google Scholar]
- de Haas, M.; Conijn, R. Carrot or Stick: The Effect of Reward and Punishment in Robot Assisted Language Learning. In Companion of the 2020 ACM/IEEE International Conference on Human-Robot Interaction; Association for Computing Machinery: New York, NY, USA, 2020; pp. 177–179. [Google Scholar] [CrossRef]
- Park, E.; Kim, K.J.; del Pobil, A.P. The Effects of a Robot Instructor’s Positive vs. Negative Feedbacks on Attraction and Acceptance towards the Robot in Classroom. In Proceedings of the Social Robotics: Third International Conference, ICSR 2011, Amsterdam, The Netherlands, 24–25 November 2011; pp. 135–141. [Google Scholar]
- Mazzoni, E.; Benvenuti, M. A Robot-partner for Preschool Children learning English using Socio-Cognitive Conflict. Educ. Technol. Soc. 2015, 18, 474–485. [Google Scholar]
- Gordon, G.; Spaulding, S.; Kory-Westlund, J.M.; Lee, J.J.; Plummer, L.; Martinez, M.; Das, M.; Breazeal, C. Affective Personalization of a Social Robot Tutor for Children’s Second Language Skills. In Proceedings of the Thirtieth AAAI Conference on Artificial Intelligence; AAAI Press: Palo Alto, CA, USA, 2016; pp. 3951–3957. [Google Scholar]
- Baxter, P.; de Jong, C.; Aarts, R.; de Haas, M.; Vogt, P. The effect of age on engagement in preschoolers’ child-robot interactions. In Proceedings of the Companion of the 2017 ACM/IEEE International Conference on Human-Robot Interaction, Vienna, Austria, 6–9 March 2017; pp. 81–82. [Google Scholar]
- Vogt, P.; van den Berghe, R.; de Haas, M.; Hoffman, L.; Kanero, J.; Mamus, E.; Montanier, J.M.; Oranç, C.; Oudgenoeg-Paz, O.; García, D.H. Second language tutoring using social robots: A large-scale study. In Proceedings of the 2019 14th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Daegu, Korea, 11–14 March 2019; pp. 497–505. [Google Scholar] [CrossRef] [Green Version]
- Konijn, E.A.; Jansen, B.; Mondaca Bustos, V.; Hobbelink, V.L.; Preciado vanegas, D. Social Robots for (Second) Language Learning in (Migrant) Primary School Children. Int. J. Soc. Robot. 2021, 1–17. [Google Scholar] [CrossRef]
- Kluger, A.N.; deNisi, A. The effects of feedback interventions on performance: A historical review, a meta-analysis, and a preliminary feedback intervention theory. Psychol. Bull. 1996, 119, 254–284. [Google Scholar] [CrossRef]
- Hattie, J.; Gan, M. Instruction based on feedback. In Handbook of Research on Learning and Instruction; Routledge: New York, NY, USA, 2011; pp. 249–271. [Google Scholar]
- Mwangi, E.; Barakova, E.; Boladeras, M.; Català, A.; Rauterberg, M. Dyadic Gaze Patterns During Child-Robot Collaborative Gameplay in a Tutoring Interaction. In Proceedings of the 27th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), Naples, Italy, 31 August–4 September 2018; pp. 856–861. [Google Scholar] [CrossRef]
- Long, M.H. Problems in SLA (Second Language Acquisition Research); Avenue: Mahwah, NJ, USA, 2006; p. 208. [Google Scholar]
- Casey, B.M.; Andrews, N.; Schindler, H.; Kersh, J.E.; Samper, A.; Copley, J. The development of spatial skills through interventions involving block building activities. Cogn. Instr. 2008, 26, 269–309. [Google Scholar] [CrossRef]
- Vogt, P.; de Haas, M.; de Jong, C.; Baxter, P.; Krahmer, E. Child-robot interactions for second language tutoring to preschool children. Front. Hum. Neurosci. 2017, 11. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Laevers, F. Well-Being and Involvement in Care Settings. A Process-Oriented Self-Evaluation Instrument (SIC’s); Kind en Gezin: Hasselt, Belgium, 2005; pp. 1–20. [Google Scholar]
- Koo, T.K.; Li, M.Y. A Guideline of Selecting and Reporting Intraclass Correlation Coefficients for Reliability Research. J. Chiropr. Med. 2016, 15, 155–163. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wittenburg, P.; Brugman, H.; Russel, A.; Klassmann, A.; Sloetjes, H. ELAN: A professional framework for multimodality research. In Proceedings of the 5th International Conference on Language Resources and Evaluation (LREC 2006), Genoa, Italy, 22–28 May 2006; Volume 5, pp. 1556–1559. [Google Scholar]
- Field, A.; Miles, J.; Field, Z. Discovering Statistics Using R; Sage Publications: New York, NY, USA, 2012. [Google Scholar]
- Mair, P.; Wilcox, R. Robust statistical methods in R using the WRS2 package. Behav. Res. Methods 2020, 52, 464–488. [Google Scholar] [CrossRef]
- Hutcheson, G.D.; Sofroniou, N. The Multivariate Social Scientist: Introductory Statistics Using Generalized Linear Models; Sage: New York, NY, USA, 1999. [Google Scholar]
- Betts, J.; Mckay, J.; Maruff, P.; Anderson, V. The development of Sustained Attention in Children: The Effect of Age and Task Load. Child Neuropsychol. 2006, 12, 205–221. [Google Scholar] [CrossRef]
- Piaget, J. Piaget’s theory. In Piaget and His School; Springer: Berlin/Heidelberg, Germany, 1976; pp. 11–23. [Google Scholar]
- Leite, I.; McCoy, M.; Lohani, M.; Ullman, D.; Salomons, N.; Stokes, C.; Rivers, S.; Scassellati, B. Narratives with Robots: The Impact of Interaction Context and Individual Differences on Story Recall and Emotional Understanding. Front. Robot. AI 2017, 4, 29. [Google Scholar] [CrossRef] [Green Version]
- van Minkelen, P.; Gruson, C.; van Hees, P.; Willems, M.; de Wit, J.; Aarts, R.; denissen, J.; Vogt, P. Using Self-determination Theory in Social Robots to Increase Motivation in L2Word Learning. In Proceedings of the ACM/IEEE International Conference on Human-Robot Interaction, Cambridge, UK, 23–26 March 2020. [Google Scholar]
- Ahmad, M.I.; Mubin, O.; Orlando, J. Adaptive Social Robot for Sustaining Social Engagement during Long-Term Children–Robot Interaction. Int. J. Hum. 2017, 33, 943–962. [Google Scholar] [CrossRef]
- Deci, E.L.; Ryan, R.M. The general causality orientations scale: Self-determination in personality. J. Res. Personal. 1985, 19, 109–134. [Google Scholar] [CrossRef]
- Gaertner, B.M.; Spinrad, T.L.; Eisenberg, N. Focused attention in toddlers: Measurement, stability, and relations to negative emotion and parenting. Infant Child Dev. 2008, 17, 339–363. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- van den Berghe, R.; Oudgenoeg-Paz, O.; Verhagen, J.; Brouwer, S.; de Haas, M.; de Wit, J.; Willemsen, B.; Vogt, P.; Krahmer, E.; Leseman, P. Individual Differences in Children’s (Language) Learning Skills Moderate Effects of Robot-Assisted Second Language Learning. Front. Robot. AI 2021, 8, 259. [Google Scholar] [CrossRef] [PubMed]
- Leyzberg, D.; Spaulding, S.; Scassellati, B. Personalizing Robot Tutors to Individuals’ Learning Differences. In Proceedings of the 2014 ACM/IEEE International Conference on Human-Robot Interaction; ACM: New York, NY, USA, 2014; pp. 423–430. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
| Correct Answer | Incorrect Answer | |||
|---|---|---|---|---|
| Condition | Dutch | English | Dutch | English |
| Adult-like | Dat is goed! Three betekent drie in het Engels. | That is right! Three means three in English | Three betekent drie, je moet drie blokken pakken. Probeer opnieuw | Three means three, you should take three blocks. Try again |
| Peer-like | - | - | Dat is fout! Je moet drie blokken pakken. Probeer opnieuw. | That is wrong! You should take three blocks. Try again. |
| No feedback | - | - | - | - |
| Condition | Robot | Blocks | Experimenter | Elsewhere |
|---|---|---|---|---|
| Adult-like | 45.1 (21.0) | 57.1 (15.3) | 13.5 (12.0) | 2.7 (3.4) |
| Peer-like | 38.1 (24.2) | 57.2 (30.1) | 15.4 (15.2) | 2.4 (3.3) |
| No feedback | 31.6 (19.3) | 56.0 (18.5) | 18.6 (17.5) | 5.6 (7.9) |
| Overall | 38.1 (21.9) | 56.8 (21.6) | 15.9 (15.0) | 3.6 (5.5) |
| Eye-Gaze Direction | Coefficient | t | p | ||
|---|---|---|---|---|---|
| Model 1 | |||||
| constant | 8.93 | 1.66 | 5.39 | <0.001 | |
| robot | −0.04 | 0.02 | 6.48 | −2.55 | |
| blocks | −0.04 | 0.02 | 6.45 | −2.86 | |
| experimenter | −0.09 | 0.02 | 3.23 | −5.75 | <0.001 |
| elsewhere | −0.10 | 0.02 | 1.55 | −4.84 | <0.001 |
| Model 2 | |||||
| constant | 8.89 | 1.65 | 5.40 | <0.001 | |
| blocks and robot | −0.04 | 0.01 | 3.86 | −2.78 | 0.01 |
| experimenter | −0.09 | 0.02 | 3.22 | −5.80 | <0.001 |
| elsewhere | −0.10 | 0.02 | 1.54 | −4.83 | <0.001 |
| Model 3 | |||||
| constant | 4.87 | 0.48 | 10.20 | <0.001 | |
| blocks | −0.01 | 0.01 | 1.14 | −1.23 | 0.22 |
| experimenter | −0.06 | 0.01 | 1.07 | −6.03 | <0.001 |
| elsewhere | −0.07 | 0.02 | 1.06 | −3.92 | <0.001 |
| Model 4 | |||||
| constant | 4.34 | 0.21 | 20.80 | <0.001 | |
| experimenter | −0.06 | 0.01 | 1.00 | −5.88 | <0.001 |
| elsewhere | −0.07 | 0.02 | 1.00 | −3.71 | <0.001 |
| Eye-Gaze Direction | Coefficient | t | p | ||
|---|---|---|---|---|---|
| Model 1 | |||||
| constant | 4.87 | 1.31 | 3.71 | <0.001 | |
| robot | 0.01 | 0.01 | 6.48 | 0.61 | 0.55 |
| blocks | −0.01 | 0.01 | 6.45 | −1.18 | 0.24 |
| experimenter | −0.05 | 0.01 | 3.23 | −4.13 | <0.001 |
| elsewhere | −0.04 | 0.02 | 1.55 | −2.61 | 0.01 |
| Model 2 | |||||
| constant | 5.63 | 0.36 | 15.69 | <0.001 | |
| blocks | −0.02 | 0.00 | 1.14 | −4.15 | <0.001 |
| experimenter | −0.06 | 0.01 | 1.07 | −8.10 | <0.001 |
| elsewhere | −0.05 | 0.01 | 1.06 | −3.59 | <0.001 |
| Model 3 | |||||
| constant | 3.35 | 0.28 | 11.81 | <0.001 | |
| robot | 0.02 | 0.01 | 1.14 | 3.98 | <0.001 |
| experimenter | −0.04 | 0.01 | 1.14 | −5.33 | <0.001 |
| elsewhere | −0.03 | 0.01 | 1.01 | −2.36 | <0.001 |
| Model 4 | |||||
| constant | 4.29 | 0.18 | 24.09 | <0.001 | |
| experimenter | −0.05 | 0.01 | 1.00 | −6.32 | <0.001 |
| elsewhere | −0.04 | 0.02 | 1.00 | −2.34 | 0.02 |
| Feedback | Pre | Post |
|---|---|---|
| Peer-like | 1.18 (0.7) | 1.61 (0.9) |
| Adult-like | 0.90 (0.4) | 1.38 (1.0) |
| No | 0.91 (0.8) | 1.33 (0.9) |
| Total | 0.98 (0.7) | 1.43 (0.9) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
de Haas, M.; Vogt, P.; Krahmer, E. When Preschoolers Interact with an Educational Robot, Does Robot Feedback Influence Engagement? Multimodal Technol. Interact. 2021, 5, 77. https://doi.org/10.3390/mti5120077
de Haas M, Vogt P, Krahmer E. When Preschoolers Interact with an Educational Robot, Does Robot Feedback Influence Engagement? Multimodal Technologies and Interaction. 2021; 5(12):77. https://doi.org/10.3390/mti5120077
Chicago/Turabian Stylede Haas, Mirjam, Paul Vogt, and Emiel Krahmer. 2021. "When Preschoolers Interact with an Educational Robot, Does Robot Feedback Influence Engagement?" Multimodal Technologies and Interaction 5, no. 12: 77. https://doi.org/10.3390/mti5120077
APA Stylede Haas, M., Vogt, P., & Krahmer, E. (2021). When Preschoolers Interact with an Educational Robot, Does Robot Feedback Influence Engagement? Multimodal Technologies and Interaction, 5(12), 77. https://doi.org/10.3390/mti5120077