Conveying Emotions by Touch to the Nao Robot: A User Experience Perspective

 ,
,  , , and
, , and 
Abstract
1. Introduction
2. Background
2.1. Human–Robot Interaction
2.2. Socially Interactive Robots
2.3. User Experience
2.4. Human Touch
2.5. The Role and Relevance of Touch in Social HRI
3. Method
3.1. Participants
3.2. Procedure and Material
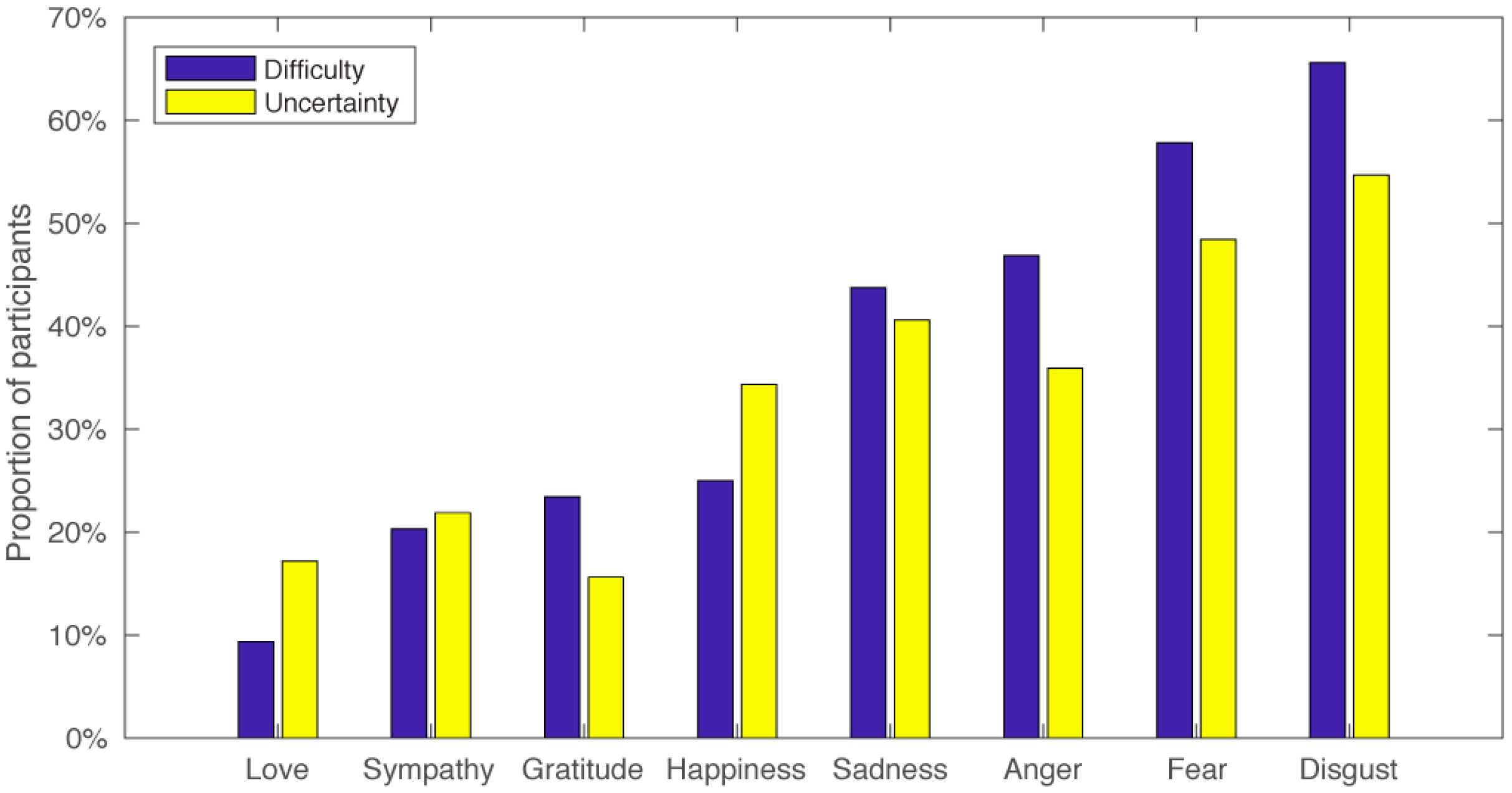
- How easy or difficult was it to convey the emotions via touch? 1: Very easy, 2: Easy, 3: Neither easy nor difficult, 4: Difficult, to 5: Very difficult.
- How certain are you of the way you chose to convey the emotions? 1: Very certain, 2: Certain, 3: Neither certain nor uncertain, 4: Uncertain, 5: Very uncertain.
- Do you think you would have conveyed the emotions in the same way if (a) it had been a human, (b) the robot had been larger, and (c) the robot had been soft?
- Where would you place the robot on the following scale? Feminine—Neutral—Masculine
- Do you think that you would have conveyed the emotions in the same way if you would have apprehended the robot as <feminine/masculine/of a specific gender>? [Adapt the question to the answer on question 4].
- What human age would you attribute to the robot?
- Have you a lot of experience interacting with children?
- How would you summarize your experience of interacting with the robot via touch?
3.3. Data Analysis
- First, all separate answers, i.e., each answer per participant and question, were indexed with participant number and gender. The separate answers were the basic components of the analysis.
- Then one topic memo per question (TM-Q) was created in which all separate answers to that question were placed in high-level groups. The specific high-level groups of a question were chosen based on the general nature of the question. For example, for Question 3 the high-level groups were “Yes—would probably have done in the same way”, “No—would probably not have done in the same way”, and “Unsure—express themselves ambivalently”.
- In the topic memo for Question 8, a rough quantification was made based on an assessment of expressions regarding positive, negative, and neutral experiences in relation the robot respectively conveying emotions by touch in order to obtain a feeling for the weight of the experiences.
- While making and walking through the TM-Qs tentative categories (TC) emerged. Three sensitizing questions were used in order to identify TCs. These were “Which experiences?”, “What influence?”, and “How do the participants reason?”.
- Thereafter, all TM-Qs were coded with the TCs and a topic memo per TC (TM-TC) was created in which all separate answers that have been coded as a specific TC were placed.
- Then the TCs were grouped based on their common characteristics and each group of TC was given a name. A textual description was written based on the patterns in the answers in each TM-TC and TM-Q.
- After that the TC were reviewed and the final categories were decided, where some TCs were merged, some were given new names, and other remained in their original form.
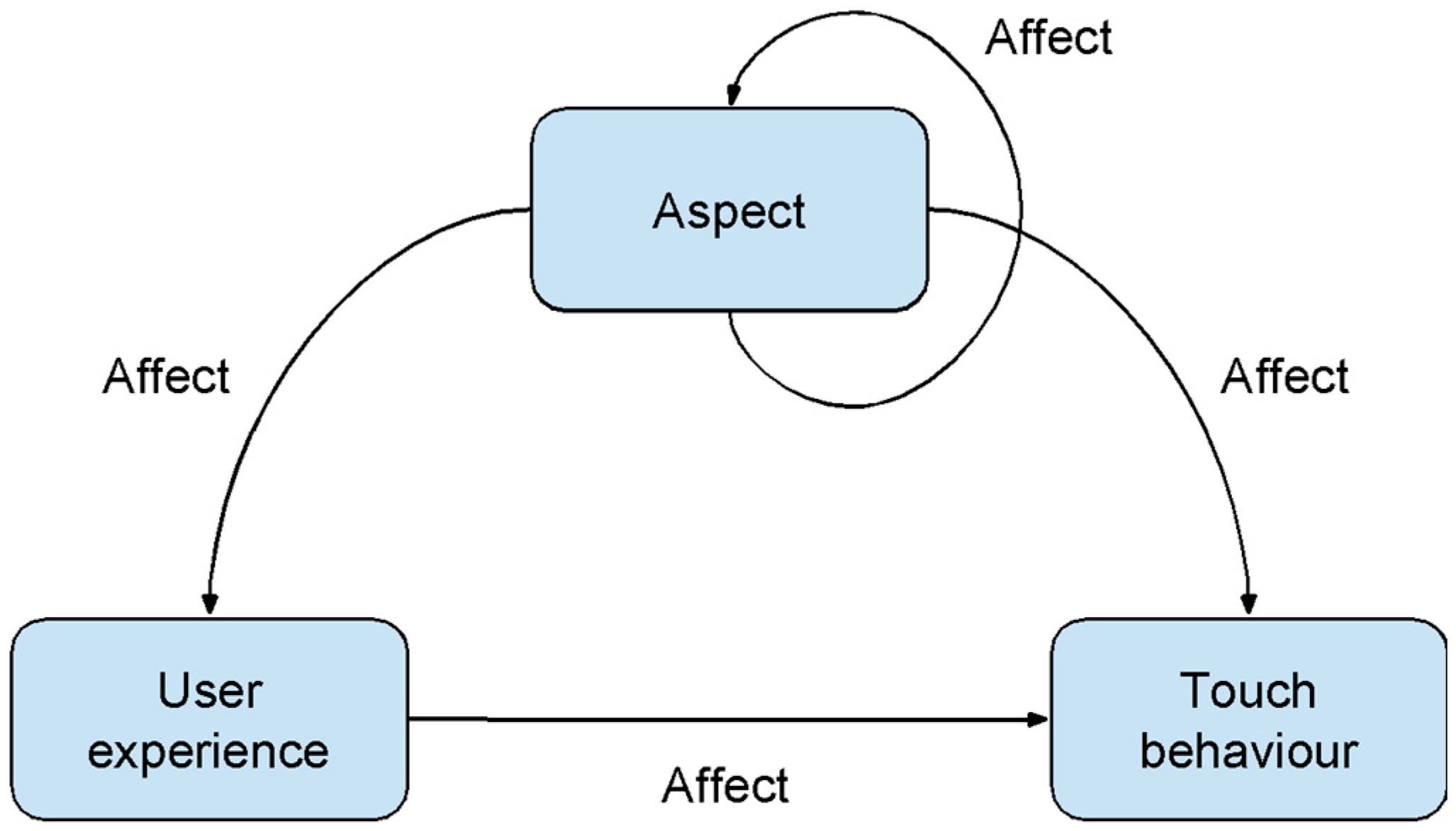
- Each category is either an experience or an affecting aspect, which forms the structure of the obtained results.
4. Results
- First, the user experiences of interacting with the robot and conveying emotions by touch are described in Section 4.1.
- Then, aspects affecting user experience and the touch behavior are presented in Section 4.2.
4.1. User Experiences
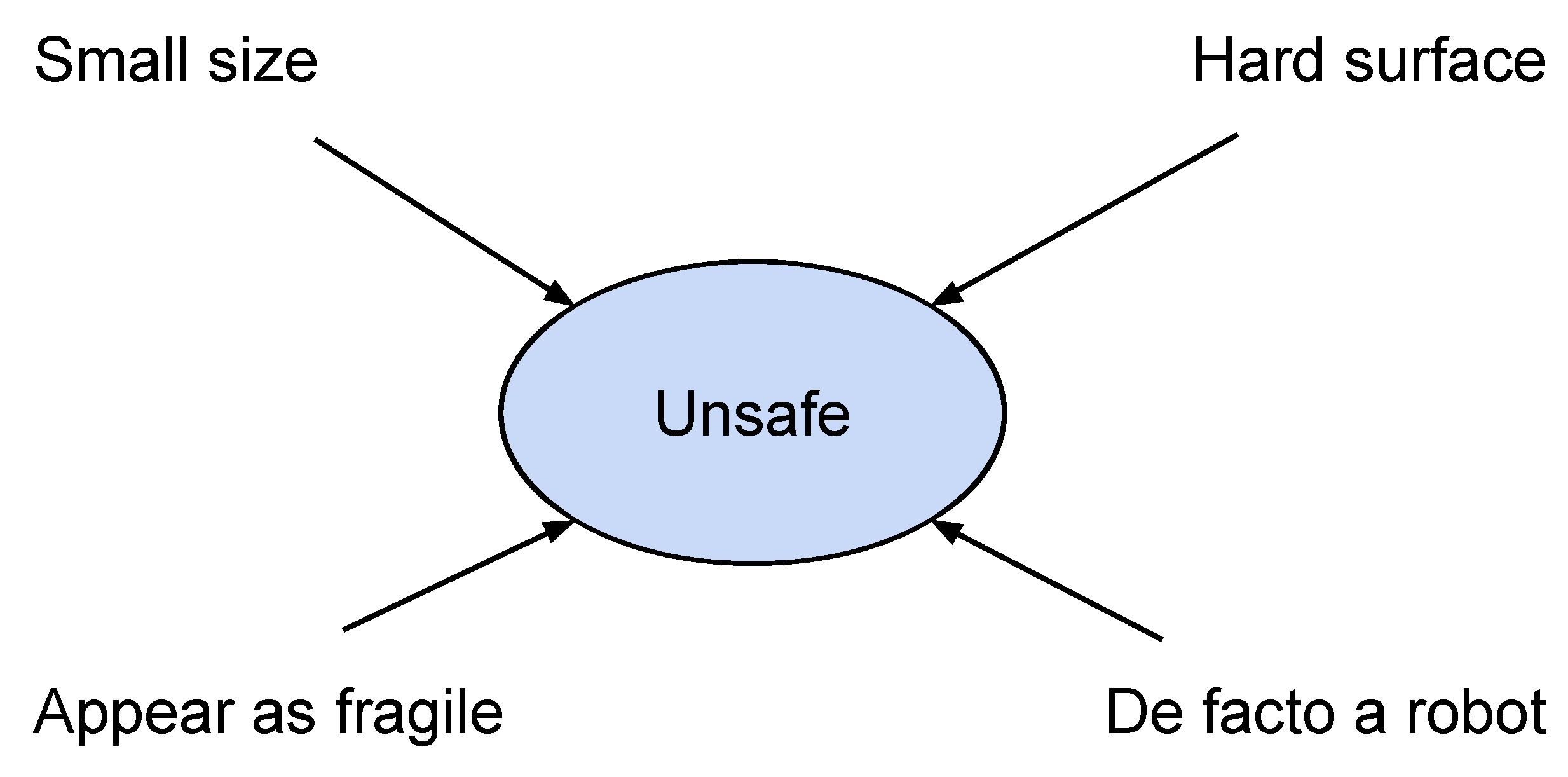
4.1.1. Negative Experience
Quotation 1: “… because I am nervous that I will break it. Therefore, I get stuck in that all the time that it is a robot. That I cannot … It is a dead gadget, I cannot push it on the side, sort of … I’m afraid that I will break it.”(Participant 64, male, translated from Swedish)
Quotation 2: “… now I was very unsafe when I was going to push it, since you think that it is a robot, it is a thing … like it is fragile.”(Participant 15, male, translated from Swedish)
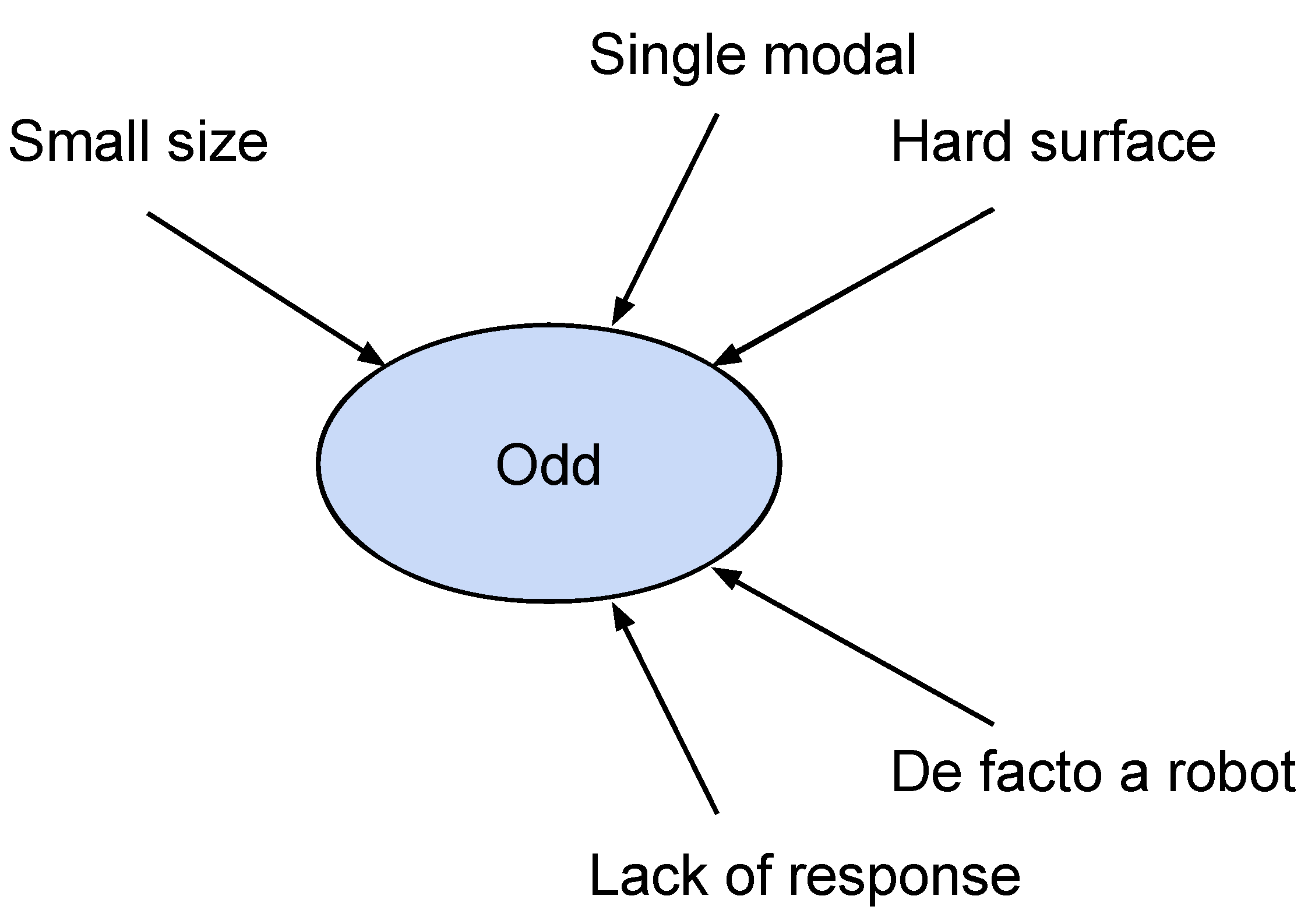
Quotation 3: “By touch? God, I feel awkward. Awkward and nervous is it like, that’s the way I would summarize it. It doesn’t feel natural.”(Participant 16, female, translated from Swedish)
Quotation 4: “It felt odd. Especially since it was so small, then you perhaps can think of it as a child, but it … I still tried to think that it was an adult so that it wouldn’t feel too strange. And that it was so hard.”(Participant 61, female, translated from Swedish)
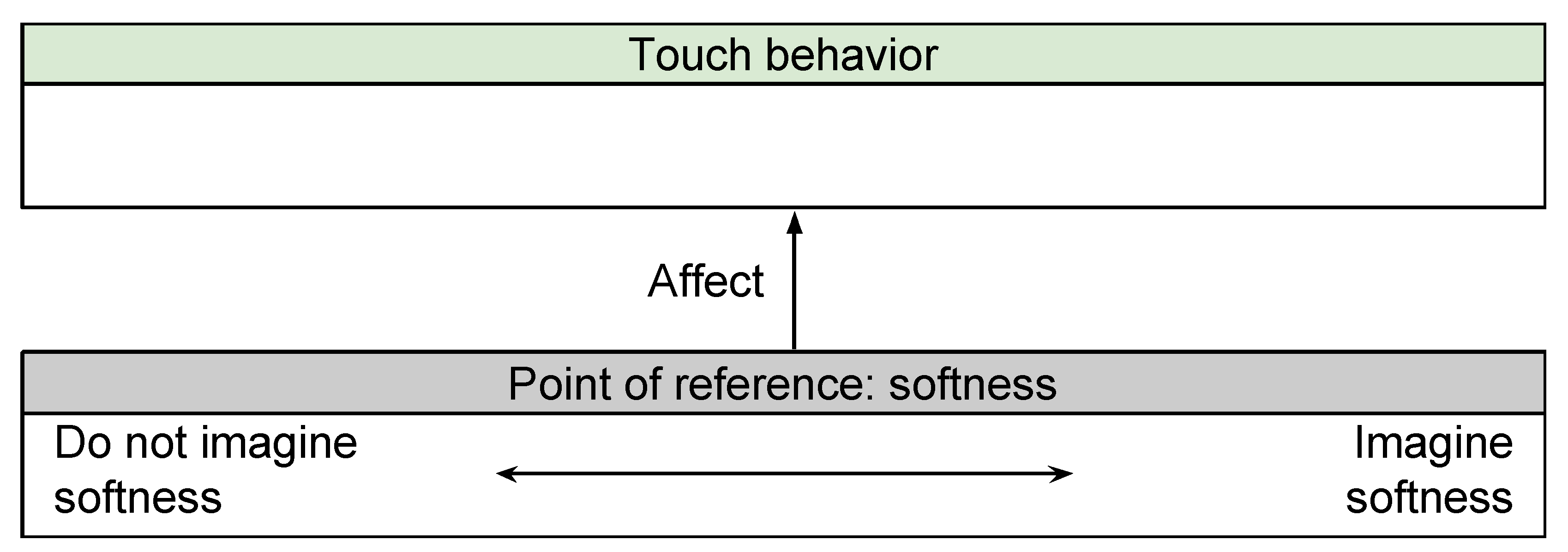
Quotation 5: “… if it would have been soft, then … it would feel more real and more human like and then it would be easier to imagine that you really convey emotions because if you touch a plastic surface, it’s hard to try to transmit emotions I think.”(Participant 2, male)
Quotation 6: “Sometimes very difficult, especially for the emotions like sadness or disgust because … […] because I convey it more with speaking to the person and via touch … I don’t know if it is easy to convey it via touch. […] gratitude, shaking hands, feeling like “thank you, thank you, thank you very much” is easier to convey than sadness.”(Participant 33, female)
Quotation 7: “The most difficult thing was the non-talking part. Yes, that was really hard.”(Participant 30, female)
Quotation 8: “Difficult. Difficult … yes. I don’t find it easy to convey emotions normally so it became even harder now, with a robot. So it was overall difficult.”(Participant 18, male, translated from Swedish)
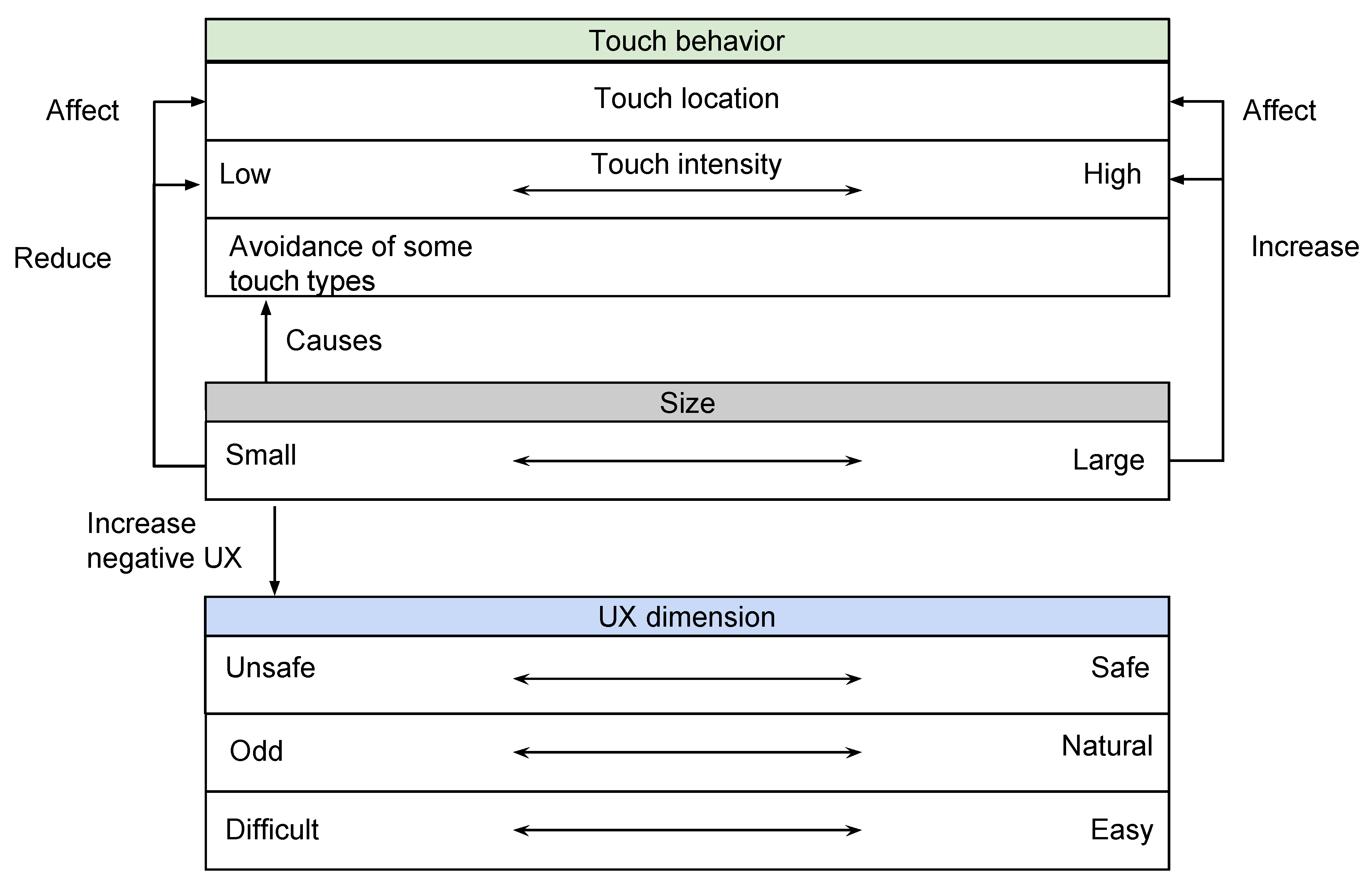
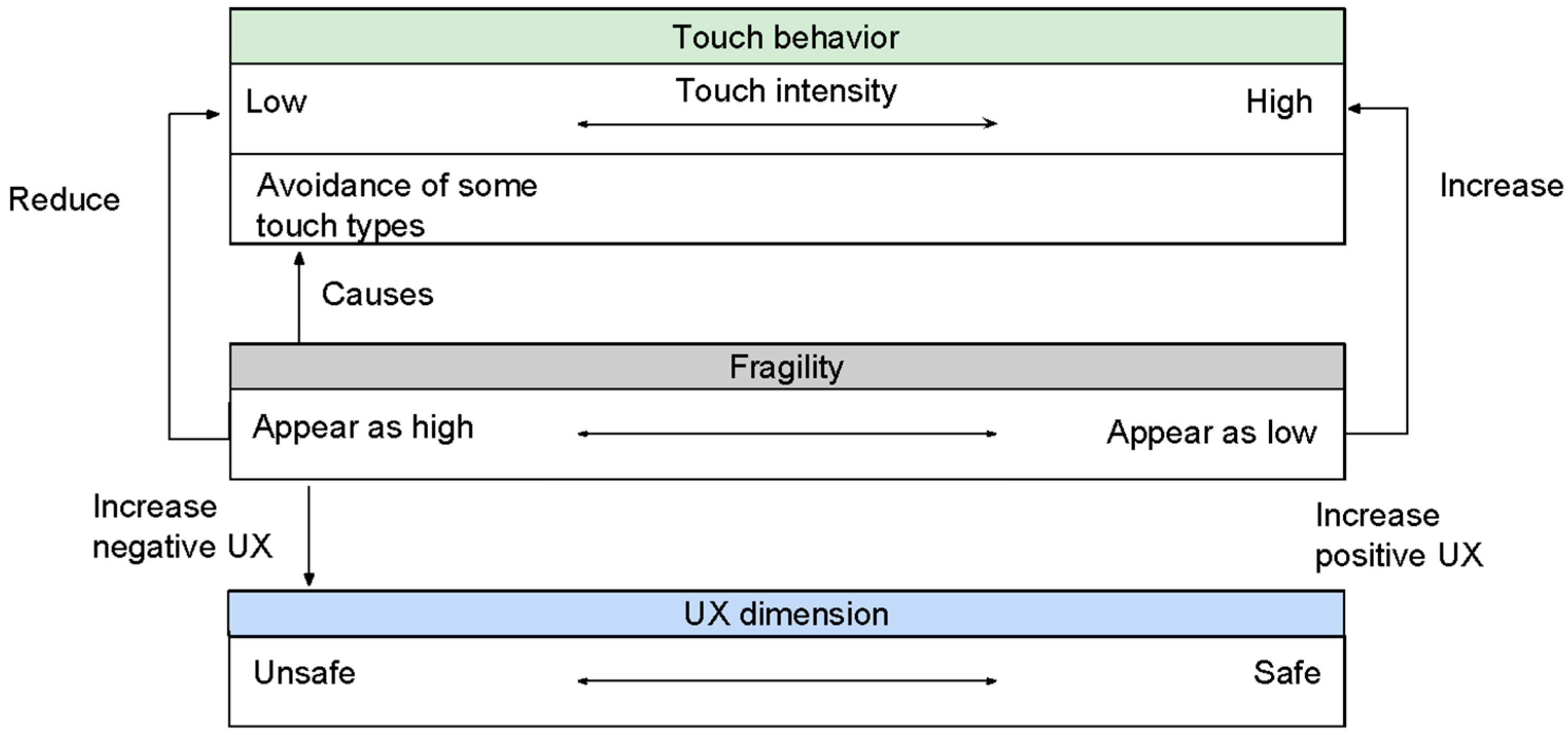
The small size of the robot made it more difficult, mainly because of its conceived fragility which excluded some touch types for some participants and, thus, made it harder to decide how to touch.
Quotation 9: “It is very difficult then. That is a bit small so that you cannot express yourself in a normal way, actually.”(Participant 39, female, translated from Swedish)
Quotation 10: “… though I think it would have been easier [if soft] to feel that it was correct perhaps. Because it would have felt more natural since you are used to interact with soft creatures […]. So it would have felt more like it was … that it was correct the way you did it.”(Participant 38, male, translated from Swedish)
4.1.2. Positive Experience
Quotation 11: “And then you are a little bit surprised that suddenly the robot turns to you, but it’s a new experience and it is cool. I really liked it.”(Participant 41, female)
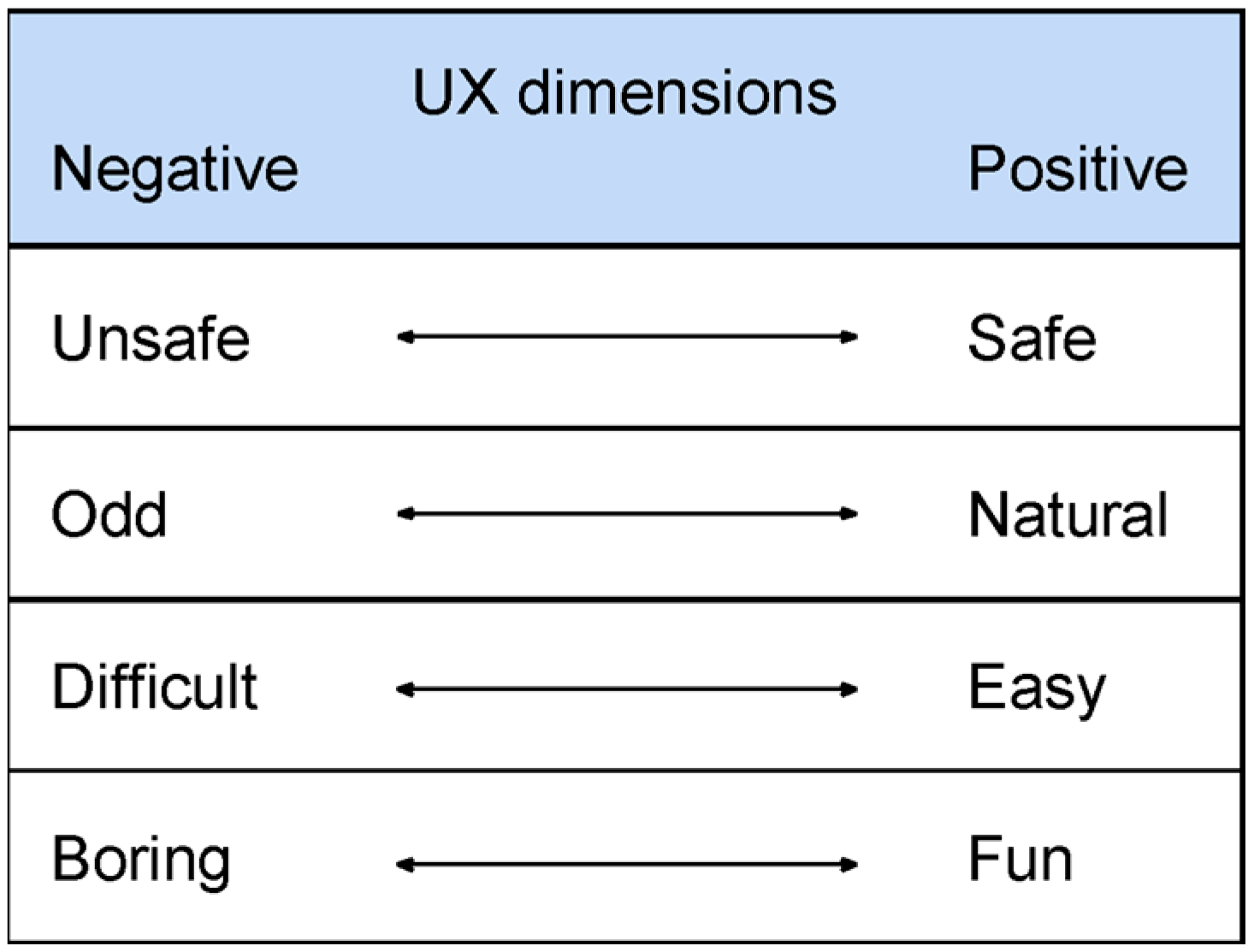
4.1.3. UX Dimensions
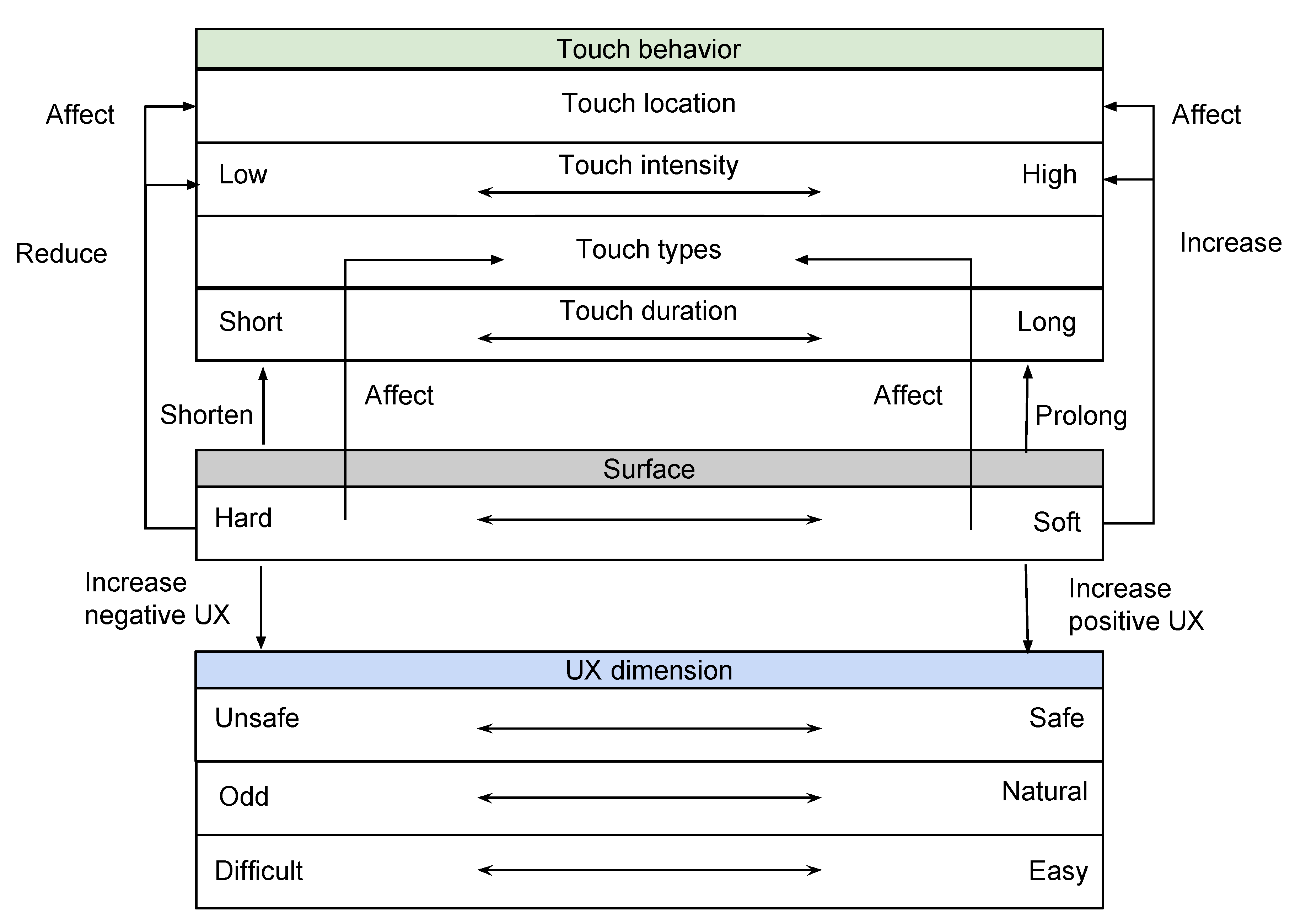
4.2. Aspects Affecting the User Experience and Touch Behavior
- Touch intensity
- Touch duration
- Touch type
- Touch location
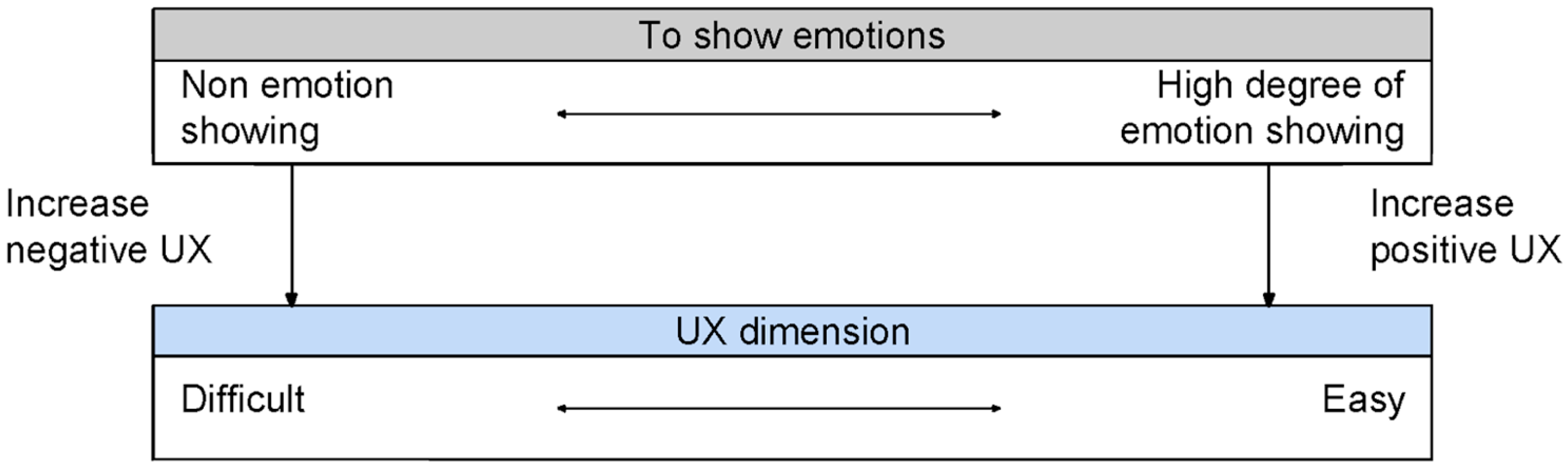
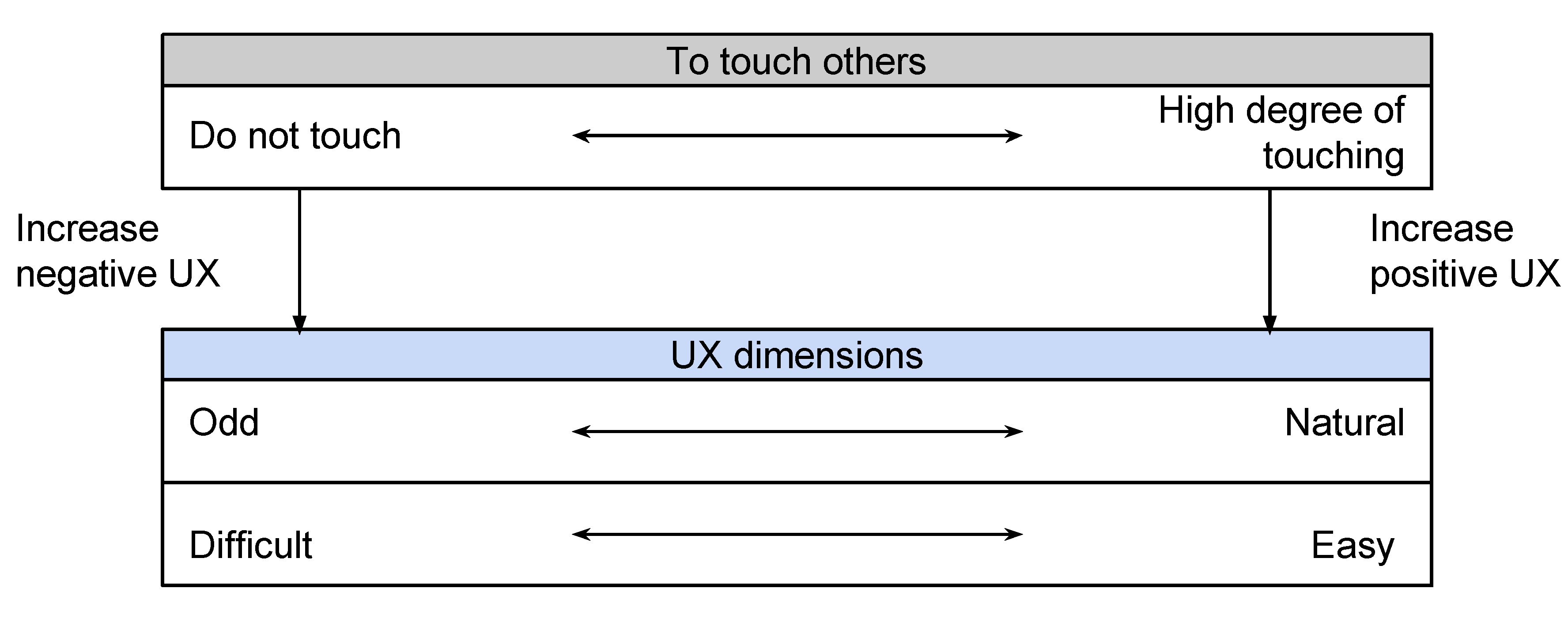
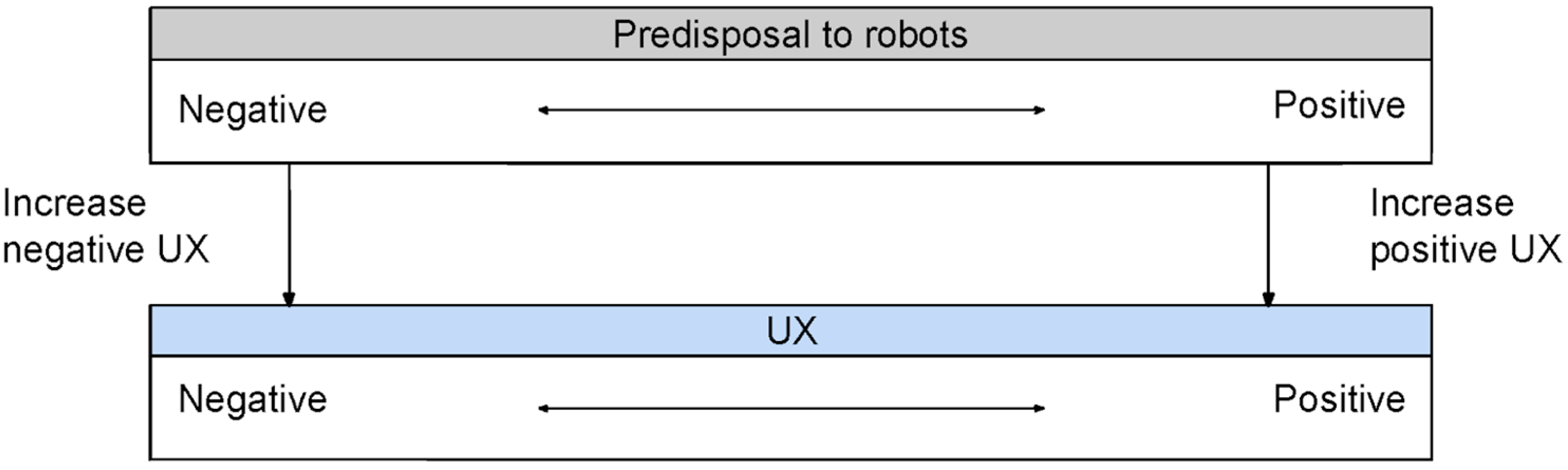
4.2.1. Individual Characteristics
Quotation 12: “… better for me that hardly show emotions at all. But I think I might have had an easier connection if it had been a human. Of course, I cannot know for sure, but I think it would have been the case.”(Participant 4, male, translated from Swedish)
Quotation 13: “Most often I don’t touch other humans at all. It is very, very unusual.”(Participant 23, male, translated from Swedish)
Quotation 14: “… because I think I would use my face to show the human what I feel. I am not a person that touch much, that’s why I think I would most show the things with my face, not with my hands.”(Participant 48, female)
Quotation 15: “I would say that it was nice. I liked it. When I was a kid, I also had a robot. So it kind of reminds me, because it was about the same size. I don’t know. I liked it. I would say that it was a good experience. I like robots.”(Participant 3, female)
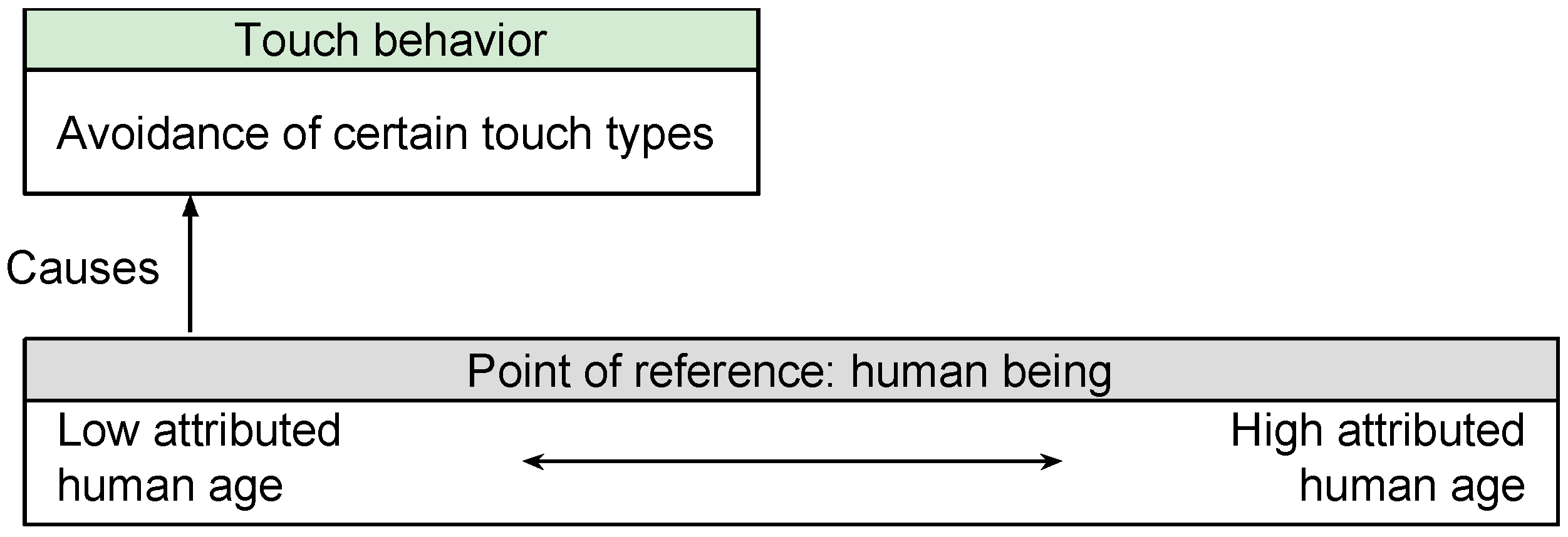
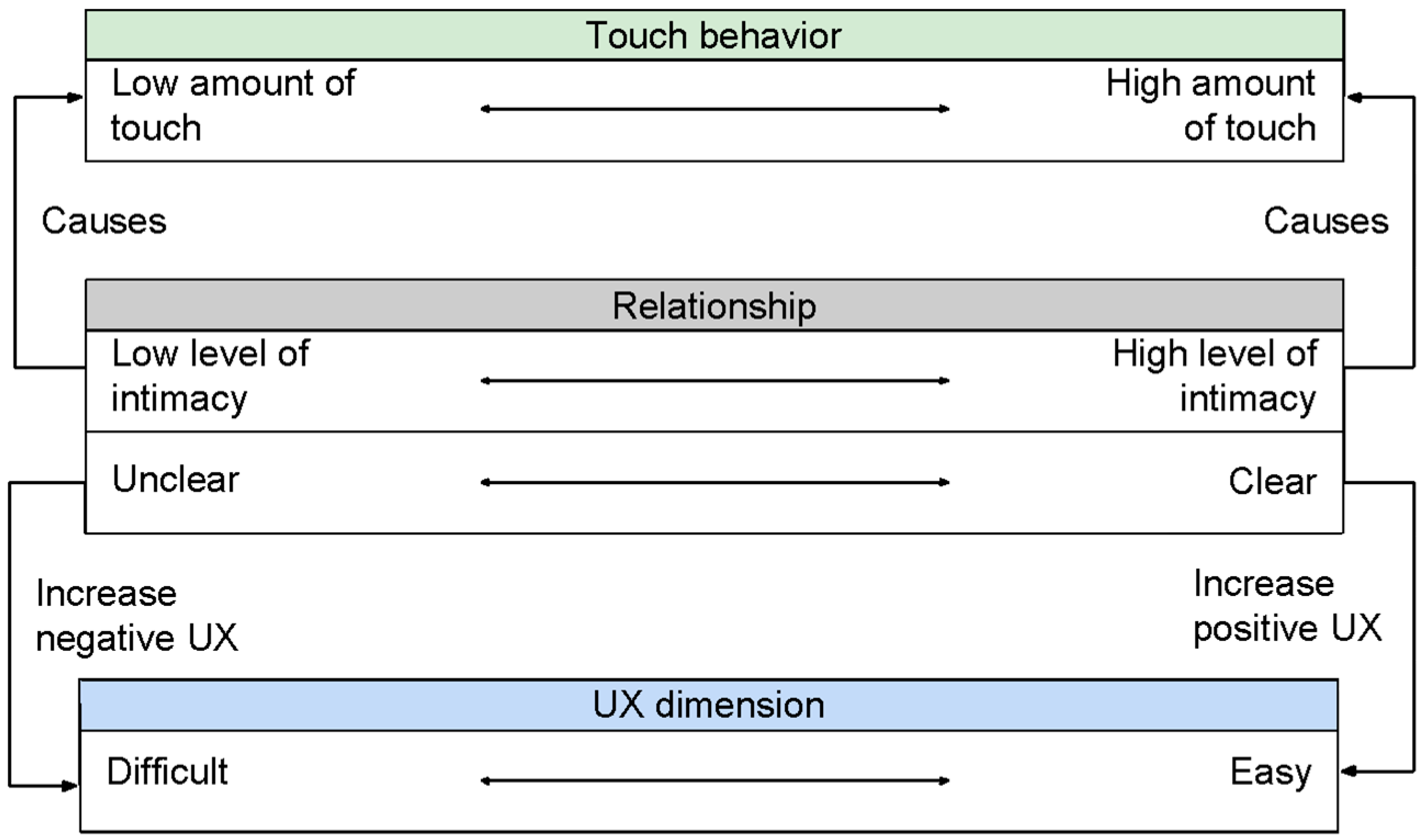
4.2.2. Ways of Thinking
Quotation 16: “It is a bit easier when you have a human … and read facial expressions and such stuff also. It is quite hard when it just stand there and sway a bit. So I don’t think I would have done in the same way if it had been a human.”(Participant 19, male, translated from Swedish)
Quotation 17: “I imagined that it was a person there, so … sure it had been a difference in size but I think would have acted the same.”(Participant 11, female, translated from Swedish)
Quotation 18: “The same with anger … it had also been easier because when you are angry with someone … I think it would have been easier to … Dare to grab hard and also too … now it felt like you walked to and pushed a small child and it felt like ‘no, you cannot hit a child’.”(Participant 42, female, translated from Swedish)
Quotation 19: “I tried to imagine the robot as a human being but … it isn’t the same natural parts like on a human, but still I don’t think I would have done the same way. Not for all emotions anyway.”(Participant 60, male, translated from Swedish)
Quotation 20: “Yes and no, it depends on who it is. You act differently with different people depending on how you know them. If you don’t know them at all, you don’t touch them.”(Participant 13, male, translated from Swedish)
Quotation 21: “No … it depends a bit I think. Would it be someone that is same, like very close to me culturally, thus with language and so, then I don’t think so. If it had been a larger distance then I think it would have been more … but not just as much.”(Participant 26, male, translated from Swedish)
Quotation 22: “No, since I imagined in my head that it was a soft object. That it was soft.”(Participant 9, male, translated from Swedish)
Quotation 23: “No I don’t think so. Because I was just thinking about now, what gender this robot has, and not before. So now when I look at him, I think he is masculine, but before, it did not matter. Because it is just a robot. It is not a real person.”(Participant 47, female)
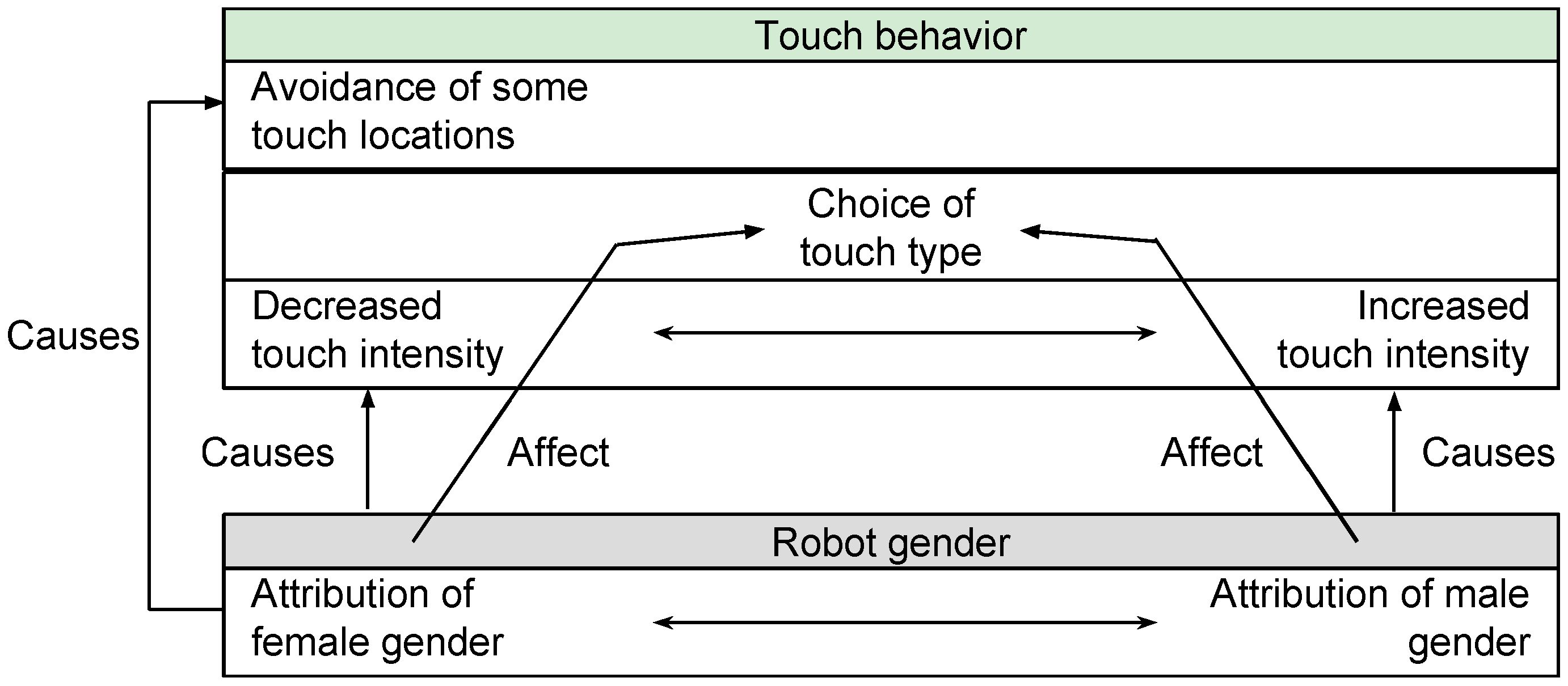
Quotation 24: “Perhaps if it had been more feminine, that it had been built like a … built feminine with breasts and everything. Then you would perhaps have avoided to poke there […].”(Participant 7, male, translated from Swedish)
Quotation 25: “In case of to express my anger I don’t think I would slap him if he was a girl.”(Participant 56, female)
Quotation 26: “Actually yes, I would have … I guess I wouldn’t have … well maybe the love would be a little bit different because the love I imagined was between a girl and a boy, and love between girls is more … I guess more like hugging, feeling friendly to each other, maybe also give a kiss on the cheek or something like this. But the other emotions, I would convey in the same way because it is not really a difference between men and women.”(Participant 33, female)
4.2.3. Robot Characteristics
Quotation 26: “No I don’t think so [i.e., would not convey emotions in the same way to human]. But why I don’t know or like … A human may understand feelings easier than a robot. Or like, it feels weird to interact emotionally with a robot.”(Participant 43, male, translated from Swedish)
Quotation 27: “The more alike a physical human it was … then it would in some way be easier to maybe apply a human I on it, sort of. In contrast to now when it more looks like a really nice robot toy that you had when you were a child. Like that. But it had for example been … it had been even worse if it would not have had eyes. So even if it has like some human feature, that gives something, but the closer to a real human the easier I would have had to see … that this is something a can interact with emotionally.”(Participant 16, female, translated from Swedish)
Quotation 28: “In particular […], but if it had been larger, like human-size, it had been much easier on the uptake and know where you should … how you should behave.”(Participant 19, male, translated from Swedish)
Quotation 29: “No I would probably not have done it in the same way. Sort of the thing with the head and shoulders and such, that it was very tight and you sort of could not get hold of with the touch, I felt. I felt like it was a bit difficult. And then like … it is difficult to touch something that is small in the same way as something big, since … the hands also becomes too big, I think. It becomes more like that you … have to pick at it sort of. Something like that.”(Participant 51, female, translated from Swedish)
Quotation 30: “Yes [i.e., would have conveyed emotions in the same way], although I think it would have been easier to feel that it was correct maybe. Because it had felt more natural because you are more used to interact with soft creatures, so to speak. So it would perhaps have felt more that it was … it was correct the way you did it, so to speak.”(Participant 38, male, translated from Swedish)
Quotation 31: “Then I think I would have touch even more. Maybe I would have made similar gesture but it would probably be more time touching. I don’t know how to say this … Like more likable to touch so maybe I spend more time … like if I want to express sympathy I will be more like ‘ahhh, it’s so soft’.”(Participant 36, female)
Quotation 32: “If it had been larger then you of course think that it is more solid, for some reason. I think that way, anyhow. Then I would probably have been more heavy-handed on those parts … Perhaps dared to grab it harder if you hugged it, and such.”(Participant 5, male, translated from Swedish)
Quotation 33: “No probably it would be easier because I had the sensation that it is too fragile so it’s like I don’t want to touch too much or interact much because maybe it will fall down or break something.”(Participant 37, male)
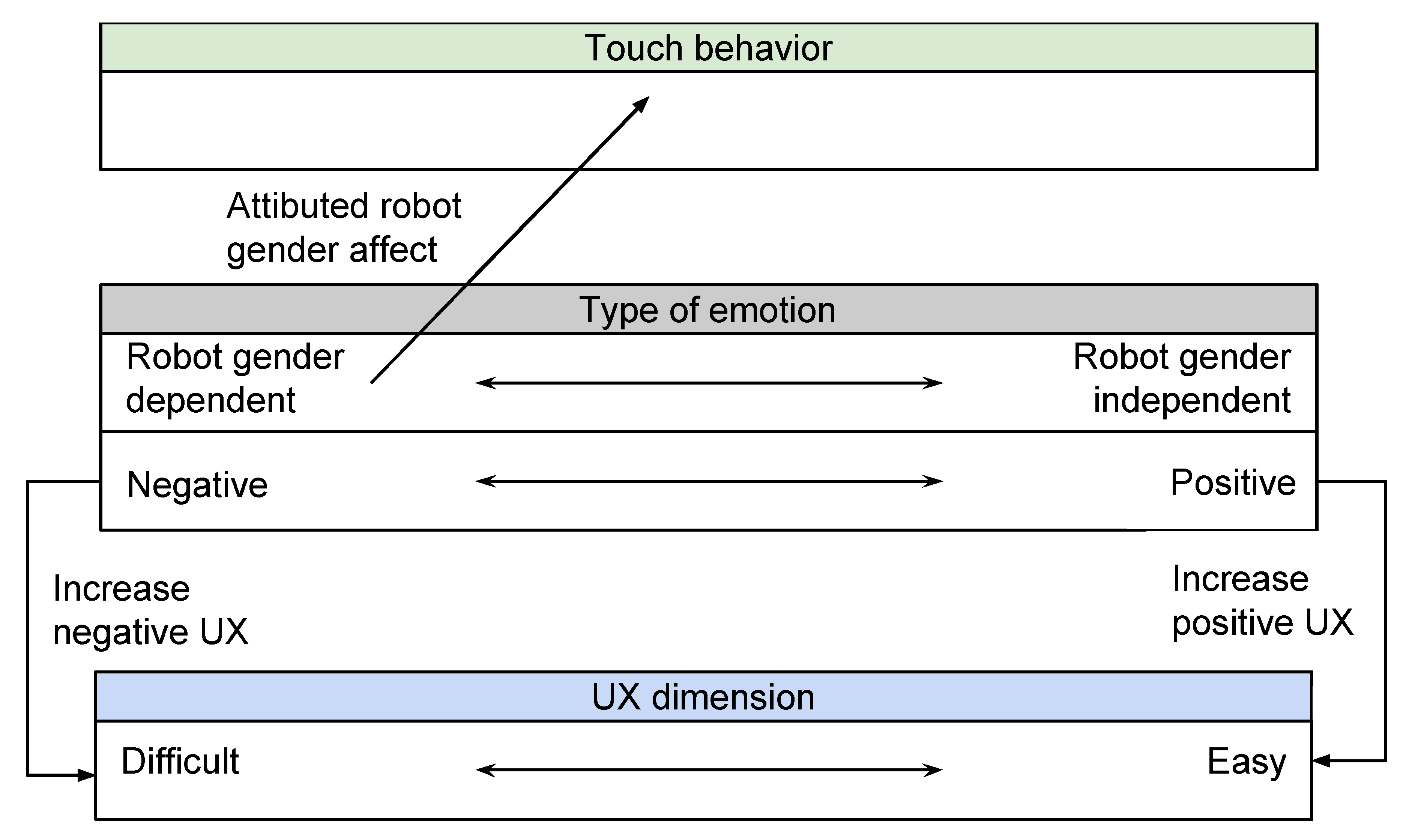
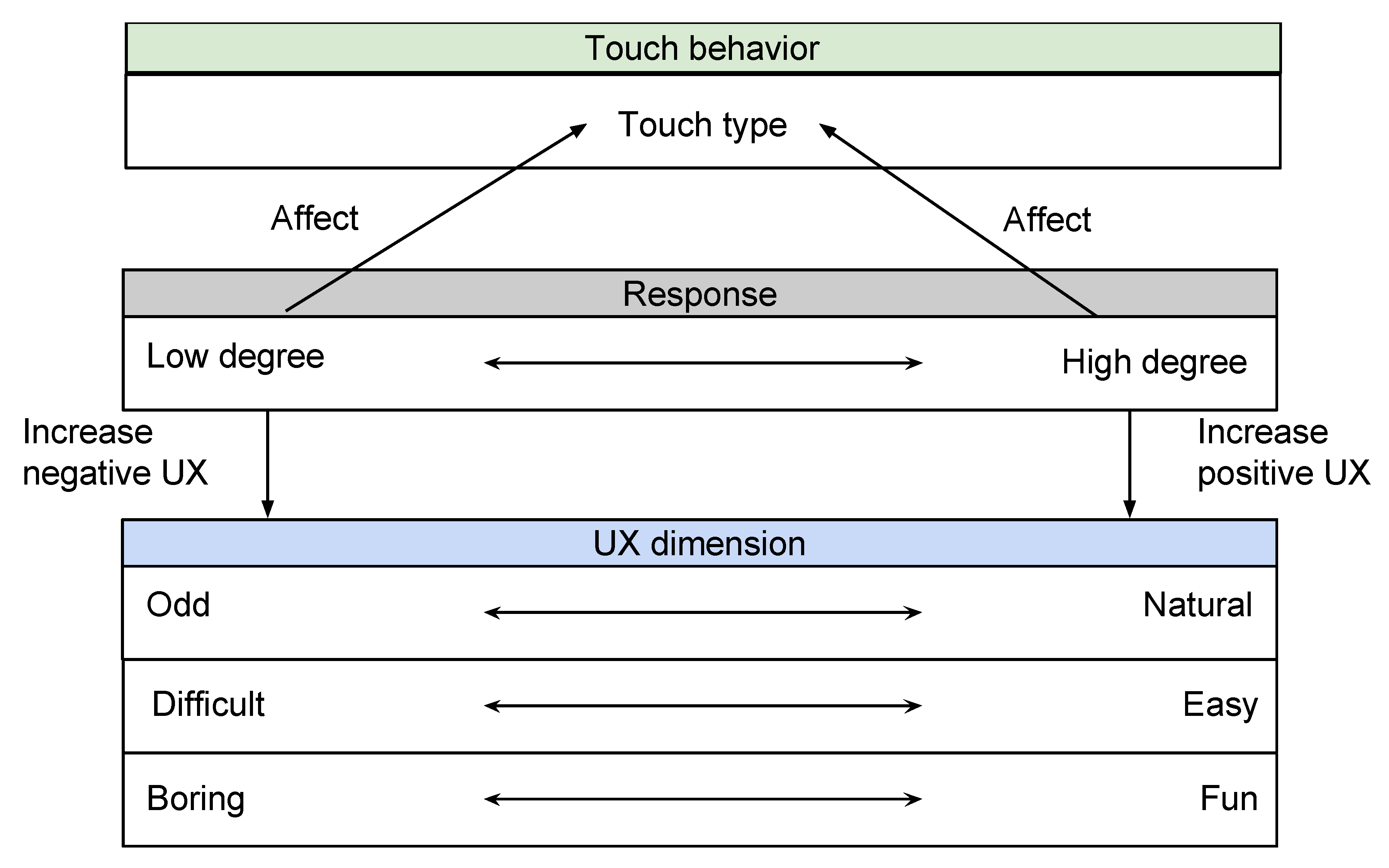
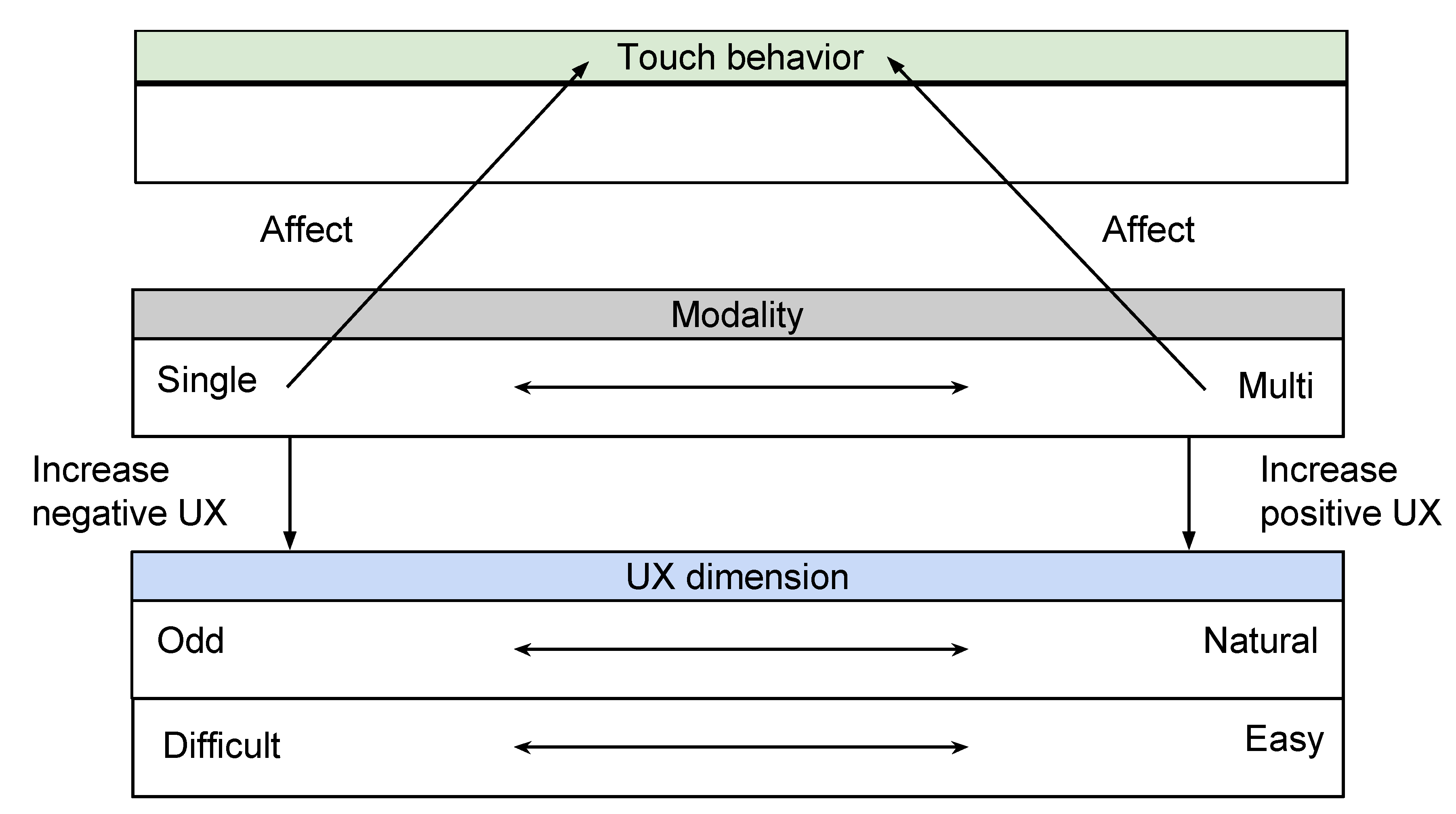
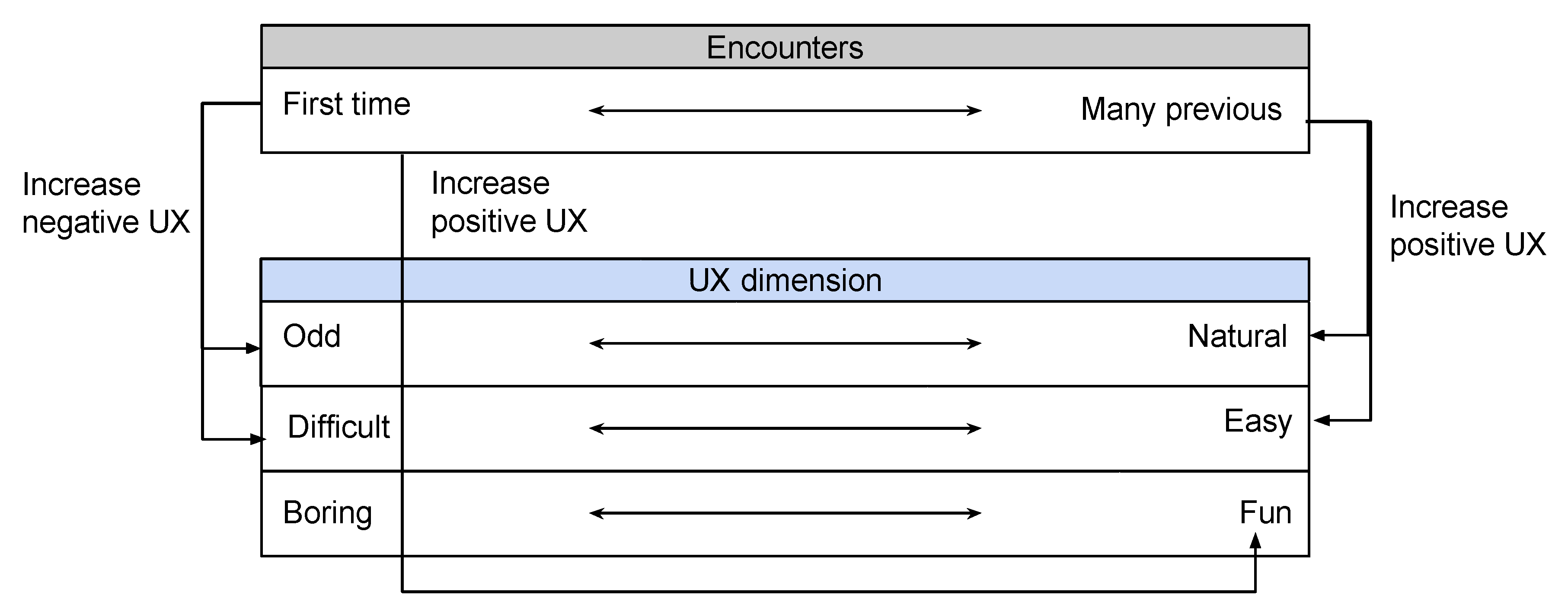
4.2.4. Task and Interaction Characteristics
Quotation 34: “No, I wouldn’t have punched it if a saw it as feminine. I would have slapped it [laughter]. But others, yeah. So just the anger-part.”(Participant 62, female)
Quotation 35: “Maybe something like anger in a different way but the rest … or something like love … but yeah I think more or less the same, yes.”(Participant 41, female)
Quotation 36: “If it had been a human then I may have acted a bit differently because then I would have expected some sort of response to further build upon with gestures. Now it was more like … it felt like … now it was one action … that it was … I was limited to. So, it would perhaps be a bit different.”(Participant 9, male, translated from Swedish)
Quotation 37: “[…] But I felt that for example the arm were a little bit rigid for some, I think it was gratitude or joy, what I wanted to do was raise his arms and do [inaudible] but the arms were a little bit hard so … I would try the same with a human, but I think with a human it would be easier because a human would probably follow my movement.”(Participant 40, male)
Quotation 38: “It is definitely something different. It is fun because when I touched it, I had the feeling that, in some way it responded some times. Not always, but some times. I wasn’t really sure how strongly I should touch it but … yeah it was a nice experience. Just to try it.”(Participant 2, male)
Quotation 39: “Confusing. I mean interacting with the robot is not the thing that is confusing, it’s the exercise to try to express emotion without talking and without getting any response. The facts of interacting with the robot is not the confusing part because it is really like humanize, like it has the hands, the face, you can really see the different parts but I think in general it is really confusing for me to express emotion and if I cannot even talk or use my gestures, then it’s … I felt really lost trying to communicate in that way.”(Participant 36, female)
Quotation 40: “It was cool. But it was difficult. In general, it is a bit difficult because you have to think carefully, otherwise it happens more instinctively with ha human or so, maybe talk a bit. But then this is also fun, because it is something new. Yes … that’s about it.”(Participant 25, male, translated from Swedish)
Quotation 41: “Some parts of it was a bit uncomfortable since they are emotions that you in general try to avoid. Disgust I found very difficult. For that I had to think of for a while. But for disgust in particular it was … trying to convey it by touch, it is a contradiction in itself. I think.”(Participant 7, male, translated from Swedish)
Quotation 42: “It felt really responsive in some way. That it … I don’t know, but when I shaked it it gave some beep sounds and such. It felt exciting and such … that it was sort of smart. And the experience was also that it is exciting to meet such a robot, or touch it. You have seen clips and such and you know they are really advanced … and also very expensive. So this was cool.”(Participant 1, male, translated from Swedish)
Quotation 43: “A little bit strange because I am not used to do something with a robot. I don’t know how can I touch him, so it has been strange, especially at the beginning.”(Participant 34, female)
5. Discussion
6. Future Work and Concluding Remarks
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Alenljung, B.; Lindblom, J. User experience of socially interactive robots: Its role and relevance. In Synthesizing Human Emotion in Intelligent Systems and Robotics; Vallverdú, J., Ed.; IGI Global: Hershey, PA, USA, 2015; pp. 352–364. [Google Scholar]
- Boden, M.; Bryson, J.; Caldwell, D.; Dautenhahn, K.; Edwards, L.; Kember, S.; Newman, P.; Parry, V.; Pegman, G.; Rodden, T.; et al. Principles of robotics: Regulating robots in the real world. Connect. Sci. 2017, 29, 124–129. [Google Scholar] [CrossRef]
- Hartson, R.; Pyla, P.S. The UX Book: Process and Guidelines for Ensuring a Quality User Experience; Morgan Kaufmann: Amsterdam, The Netherlands, 2012; ISBN 978-0-12-385241-0. [Google Scholar]
- Hassenzahl, M.; Roto, V. Being and doing: A perspective on user experience and its measurement. Interfaces 2007, 72, 10–12. [Google Scholar]
- Anderson, J.; McRee, J.; Wilson, R.; the Effective UI Team. Effective UI; O’Reilly: Sebastopol, CA, USA, 2010; ISBN 978-0-596-15478-3. [Google Scholar]
- Lindblom, J.; Andreasson, R. Current challenges for UX evaluation of human-robot interaction. In Advances in Ergonomics of Manufacturing: Managing the Enterprise of the Future; Schlick, C., Trzcieliński, S., Eds.; Springer: Cham, Switzerland, 2016; pp. 267–277. [Google Scholar]
- Weiss, A.; Bernhaupt, R.; Tscheligi, M.; Yoshida, E. Addressing user experience and societal impact in a user study with a humanoid robot. In Proceedings of the Symposium on New Frontiers in Human-Robot Interaction (AISB2009), Edinburgh, UK, 6–9 April 2009; pp. 150–157, ISBN 190295680X. [Google Scholar]
- De Graaf, M.M.A.; Allouch, S.B. Exploring influencing variables for the acceptance of social robots. Robot. Auton. Syst. 2013, 61, 1476–1486. [Google Scholar] [CrossRef]
- Hassenzahl, M. User experience and experience design. In The Encyclopedia of Human-Computer Interaction, 2nd ed.; Soegaard, M., Friis Dam, R., Eds.; The Interaction Design Foundation: Aarhus, Denmark, 2013. [Google Scholar]
- Hassenzahl, M.; Tractinsky, N. User experience—A research agenda. Behav. Inf. Technol. 2006, 25, 91–97. [Google Scholar] [CrossRef]
- Dautenhahn, K. Socially intelligent robots: Dimensions of human-robot interaction. Philos. Trans. R. Soc. B Biol. Sci. 2007, 362, 679–704. [Google Scholar] [CrossRef] [PubMed]
- Silvera-Tawil, D.; Rye, D.; Velonaki, M. Interpretation of social touch on an artificial arm covered with an EIT-based sensitive skin. Int. J. Soc. Robot. 2014, 6, 489–505. [Google Scholar] [CrossRef]
- Montagu, A. Touching: The Human Significance of the Skin, 3rd ed.; Harper & Row: New York, NY, USA, 1986; ISBN 13:978-0060960285. [Google Scholar]
- Dahiya, R.S.; Metta, G.; Valle, M.; Sandini, G. Tactile sensing-from humans to humanoids. IEEE Trans. Robot. 2010, 26, 1–20. [Google Scholar] [CrossRef]
- Silvera-Tawil, D.; Rye, D.; Velonaki, M. Artificial skin and tactile sensing for socially interactive robots: A review. Robot. Auton. Syst. 2015, 63, 230–243. [Google Scholar] [CrossRef]
- Hertenstein, M.J.; Holmes, R.; McCullough, M.; Keltner, D. The communication of emotion via touch. Emotion 2009, 9, 566–573. [Google Scholar] [CrossRef]
- Lee, K.; Jung, Y.; Kim, J.; Kim, S.R. Are physically embodied social agents better than disembodied social agents? The effects of physical embodiment, tactile interaction, and people’s loneliness in human-robot interaction. Int. J. Hum.-Comput. Stud. 2006, 64, 962–973. [Google Scholar] [CrossRef]
- Ogawa, K.; Nishio, S.; Koda, K.; Balistreri, G.; Watanabe, T.; Ishiguro, H. Exploring the natural reaction of young and aged person with Telenoid in a real world. J. Adv. Comput. Intell. Intell. Inform. 2011, 15, 592–597. [Google Scholar] [CrossRef]
- Turkle, S.; Breazeal, C.; Dasté, O.; Scassellati, B. First encounters with Kismet and Cog: Children respond to relational artifacts. In Digital Media: Transformations in Human Communication; Messaris, P., Humphreys, L., Eds.; Peter Lang: New York, NY, USA, 2006; pp. 313–330. ISBN 978-0-8204-7840-1. [Google Scholar]
- SoftBank Robotics. Available online: https://www.softbankrobotics.com/emea/en (accessed on 5 November 2018).
- Andreasson, R.; Alenljung, B.; Billing, E.; Lowe, R. Affective touch in human-robot interaction: Conveying emotion to the Nao robot. Int. J. Soc. Robot. 2018, 10, 473–491. [Google Scholar] [CrossRef]
- Alenljung, B.; Andreasson, R.; Billing, E.A.; Lindblom, J.; Lowe, R. User experience of conveying emotions by touch. In Proceedings of the 26th IEEE International Symposium on Robot and Human Interactive Communication, RO-MAN, Lisbon, Portugal, 28 August–1 September 2017; pp. 1240–1247. [Google Scholar] [CrossRef]
- Goodrich, M.A.; Schultz, A.C. Human-robot interaction: A survey. Found. Trends Hum.–Comput. Interact. 2007, 1, 203–275. [Google Scholar] [CrossRef]
- Dautenhahn, K.; Saunders, J. Introduction. In New Frontiers in Human-Robot Interaction; Dautenhahn, K., Saunders, J., Eds.; John Benjamins Publishing Company: Amsterdam, The Netherlands, 2011; ISBN 978-90-272-0455-4. [Google Scholar]
- Dautenhahn, K. Human-Robot Interaction. In The Encyclopedia of Human-Computer Interaction, 2nd ed.; Soegaard, M., Friis Dam, R., Eds.; The Interaction Design Foundation: Aarhus, Denmark, 2013. [Google Scholar]
- Yanco, H.A.; Drury, J. Classifying human-robot interaction: An updated taxonomy. In Proceedings of the IEEE International Conference on Systems, Man and Cybernetics 2004, The Hague, The Netherlands, 10–13 October 2004; pp. 2841–2846. [Google Scholar] [CrossRef]
- Thrun, S. Toward a framework for human-robot interaction. Hum.-Comput. Interact. 2004, 19, 9–24. [Google Scholar] [CrossRef]
- Scholtz, J. Theory and evaluation of human robot interaction. In Proceedings of the 36th Hawaii International Conference of System Sciences (HICSS’03), Big Island, HI, USA, 6–9 January 2003. [Google Scholar] [CrossRef]
- Fong, T.; Nourbakhsh, I.; Dautenhahn, K. A survey of socially interactive robots. Robot. Auton. Syst. 2003, 42, 143–166. [Google Scholar] [CrossRef]
- Kaasinen, E.; Roto, V.; Hakulinen, J.; Heimonen, T.; Jokinen, J.P.P.; Karvonen, H.; Keskinen, T.; Koskinen, H.; Lu, Y.; Saarilouma, P.; et al. Defining user experience goals to guide the design of industrial systems. Behav. Inf. Technol. 2015, 34, 976–991. [Google Scholar] [CrossRef]
- Partala, T.; Kallinen, A. Understanding the most satisfying and unsatisfying user experiences: Emotions, psychological needs, and context. Interact. Comput. 2012, 24, 25–34. [Google Scholar] [CrossRef]
- Hertenstein, M.J.; Verkamp, J.M.; Kerestes, A.M.; Holmes, R.M. The communicative functions of touch in humans, nonhuman primates and rats. Genet. Soc. Gen. Psychol. Monogr. 2006, 132, 5–94. [Google Scholar] [CrossRef]
- Knapp, M.L.; Hall, J.A. Nonverbal Communication in Human Interaction, 7th ed.; Cengage Learning: Boston, MA, USA, 2010; ISBN 13:9780495568698. [Google Scholar]
- Jones, S.E.; Yarbrough, E. A naturalistic study of the meanings of touch. Commun. Monogr. 1985, 52, 19–56. [Google Scholar] [CrossRef]
- Kraus, M.W.; Huang, C.; Keltner, D. Tactile communication, cooperation, and performance: An ethological study of the NBA. Emotion 2010, 10, 745–749. [Google Scholar] [CrossRef] [PubMed]
- Gallace, A.; Spence, C. The science of interpersonal touch: An overview. Neurosci. Biobehav. Rev. 2010, 34, 246–259. [Google Scholar] [CrossRef] [PubMed]
- Field, T.M. Touch, 2nd ed.; The MIT Press: Cambridge, MA, USA, 2014; ISBN 13:978-0-805-81890-1. [Google Scholar]
- Lagercrantz, H.; Changeux, J.-P. The emergence of human consciousness: From fetal to neonatal life. Pediatr. Res. 2009, 65, 255–260. [Google Scholar] [CrossRef] [PubMed]
- Feldman, R.; Eidelman, A.I.; Sirota, L.; Weller, A. Comparison of skin-to-skin (kangaroo) and traditional care: Parenting outcomes and preterm infant development. Pediatrics 2002, 110, 16–26. [Google Scholar] [CrossRef] [PubMed]
- Beckett, C.; Maughan, B.; Rutter, M.; Castle, J.; Colvert, E.; Groothues, C.; Kreppner, J.; Stevens, S.; O’Connor, T.G.; Sonuga-Barke, E.J.S. Do the effects of early severe deprivation on cognition persist into early adolescence? Findings from the English and Romanian adoptees study. Child Dev. 2006, 77, 696–711. [Google Scholar] [CrossRef] [PubMed]
- MacLean, K. The impact of institutionalization on child development. Dev. Psychopathol. 2003, 15, 853–884. [Google Scholar] [CrossRef]
- Coakley, A.B.; Duffy, M.E. The effect of therapeutic touch on postoperative patients. J. Holist. Nurs. 2010, 28, 193–200. [Google Scholar] [CrossRef] [PubMed]
- Ditzen, B.; Neumann, I.D.; Bodenmann, G.; von Dawans, B.; Turner, R.A.; Ehlert, U.; Heinrich, M. Effects of different kinds of couple interaction on cortisol and heart rate responses to stress in women. Psychoneuroendocrinology 2007, 32, 565–574. [Google Scholar] [CrossRef] [PubMed]
- Crusco, A.H.; Wetzel, C.G. The Midas touch: The effects of interpersonal touch on restaurant tipping. Pers. Soc. Psychol. Bull. 1984, 10, 512–517. [Google Scholar] [CrossRef]
- Fisher, J.D.; Rytting, M.; Heslin, R. Hands touching hands: Affective and evaluative effects of interpersonal touch. Sociometry 1976, 39, 416–421. [Google Scholar] [CrossRef]
- Guéguen, N.; Fischer-Lokou, J. An evaluation of touch on a large request: A field setting. Psychol. Rep. 2002, 90, 267–269. [Google Scholar] [CrossRef]
- Legg, A.A.; Wilson, J.H. Instructor touch enhanced college students’ evaluations. Soc. Psychol. Educ. 2013, 16, 317–327. [Google Scholar] [CrossRef]
- Major, B.; Schmidlin, A.M.; Williams, L. Gender patterns in social touch: The impact of setting and age. J. Pers. Soc. Psychol. 1990, 58, 634–643. [Google Scholar] [CrossRef] [PubMed]
- Henley, N.M. Status and sex: Some touching observations. Bull. Psychon. Soc. 1973, 2, 91–93. [Google Scholar] [CrossRef]
- DiBiase, R.; Gunnoe, J. Gender and Culture Differences in Touching Behavior. J. Soc. Psychol. 2004, 144, 49–62. [Google Scholar] [CrossRef] [PubMed]
- Hall, J.A.; Veccia, E.M. More ‘touching’ observations: New insights on men, women, and interpersonal touch. J. Pers. Soc. Psychol. 1990, 59, 1155–1162. [Google Scholar] [CrossRef]
- McDaniel, E.; Andersen, P.A. International patterns of interpersonal tactile communication: A field study. J. Nonverbal Behav. 1998, 22, 59–75. [Google Scholar] [CrossRef]
- Shibata, T.; Mitsui, T.; Wada, K.; Touda, A.; Kumasaka, T.; Tagami, K.; Tanie, K. Mental commit robot and its application to therapy of children. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Como, Italy, 8–12 July 2001; pp. 1053–1058. [Google Scholar] [CrossRef]
- Stiehl, W.D.; Lieberman, J.; Breazeal, C.; Basel, L.; Lalla, L.; Wolf, M. Design of a therapeutic robotic companion for relational, affective touch. In Proceedings of the IEEE International Workshop Robot and Human Interactive Communication, Nashville, TN, USA, 13–15 August 2005; pp. 408–415. [Google Scholar] [CrossRef]
- Yohanan, S.; MacLean, K.E. The role of affective touch in human-robot interaction: Human intent and expectations in touching the haptic creature. Int. J. Soc. Robot. 2012, 4, 163–180. [Google Scholar] [CrossRef]
- Knight, H.; Toscano, R.; Stiehl, W.D.; Chang, A.; Wang, Y.; Breazeal, C. Real-time social touch gesture recognition for sensate robots. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems IROS 2009, St. Louis, MO, USA, 10–15 October 2009; pp. 3715–3720. [Google Scholar] [CrossRef]
- Noda, T.; Miyashita, T.; Ishiguro, H.; Hagita, N. Super-flexible skin sensors embedded on the whole body self-organizing based on haptic interactions. In Human-Robot Interaction in Social Robotics; Kanda, T., Ishiguro, H., Eds.; CRC Press: Boca Raton, FL, USA, 2013; pp. 183–202. ISBN 13:978-1-4665-0698-5. [Google Scholar]
- Cooney, M.D.; Nishio, S.; Ishiguro, H. Importance of touch for conveying affection in a multimodal interaction with a small humanoid robot. Int. J. Humanoid Robot. 2015, 12. [Google Scholar] [CrossRef]
- Cooney, M.D.; Nishio, S.; Ishiguro, H. Recognizing affection for a touch-based interaction with a humanoid robot. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems IROS, Vilamoura, Portugal, 7–11 October 2012; pp. 1420–1427. [Google Scholar] [CrossRef]
- Lowe, R.; Andreasson, R.; Alenljung, B.; Lund, A.; Billing, E. Designing for a wearable affective interface for the NAO robot: A study of emotion conveyance by touch. Multimodal Technol. Interact. 2018, 2, 2. [Google Scholar] [CrossRef]
- Bartneck, C.; Kulić, D.; Croft, E.; Zoghbi, S. Measurement instruments for the anthropomorphism, animacy, likeability, perceived intelligence, and perceived safety of robots. Int. J. Soc. Robot. 2009, 1, 71–81. [Google Scholar] [CrossRef]
- Nomura, T.; Kanda, T.; Suzuki, T. Experimental investigation into influence of negative attitudes towards robots on human-robot interaction. AI Soc. 2006, 20, 138–150. [Google Scholar] [CrossRef]
- Thomas, D.R. A general inductive approach for analyzing qualitative evaluation data. Am. J. Eval. 2006, 27, 237–246. [Google Scholar] [CrossRef]
- Patton, M.Q. Qualitative Research & Evaluation Methods: Integrating Theory and Practice, 4th ed.; SAGE Publications: Thousand Oaks, CA, USA, 2015; ISBN 9781412972123. [Google Scholar]
- Strauss, A.; Corbin, J. Basics of Qualitative Research: Techniques and Procedures for Developing Grounded Theory, 2nd ed.; SAGE Publication: Thousand Oaks, CA, USA, 1998; ISBN 0-8039-5939-7. [Google Scholar]
- Alenljung, B.; Lindblom, J.; Andreasson, R.; Ziemke, T. User experience in social human-robot interaction. Int. J. Ambient Comput. Intell. 2017, 8, 12–31. [Google Scholar] [CrossRef]
- Young, J.E.; Sung, J.Y.; Voida, A.; Sharlin, E.; Igarashi, T.; Christensen, H.I.; Grinter, R.E. Evaluating human-robot interaction: Focusing on the holistic interaction experience. Int. J. Soc. Robot. 2011, 3, 53–67. [Google Scholar] [CrossRef]
- Weiss, A.; Bernhaupt, R.; Tscheligi, M. The USUS evaluation framework for user-centered HRI. In New Frontiers in Human-Robot Interaction; Dautenhahn, K., Saunders, J., Eds.; John Benjamins: Amsterdam, The Netherlands, 2011; pp. 89–110. ISBN 978 90 272 0455 4. [Google Scholar]
- Jourard, S.M. An exploratory study of body-accessibility. Br. J. Soc. Clin. Psychol. 1966, 5, 221–231. [Google Scholar] [CrossRef] [PubMed]
- Tay, B.; Jung, Y.; Park, T. When stereotypes meet robots: The double-edge sword of robot gender and personality in human–robot interaction. Comput. Hum. Behav. 2014, 38, 75–84. [Google Scholar] [CrossRef]
- Brščić, D.; Kidokoro, H.; Suehiro, Y.; Kanda, T. Escaping from Children’s Abuse of Social Robots. In Proceedings of the 10th ACM/IEEE International Conference on Human-Robot Interaction HRI, Portland, OR, USA, 3–5 March 2015; pp. 59–66. [Google Scholar] [CrossRef]
- Salvini, P.; Ciaravella, G.; Yu, W.; Ferri, G.; Manzi, A.; Mazzolai, B.; Laschi, C.; Oh, S.R.; Dario, P. How safe are service robots in urban environments? Bullying a robot. In Proceedings of the 19th International Symposium in Robot and Human Interactive Communication, Viareggio, Italy, 13–15 September 2010; pp. 1–7. [Google Scholar] [CrossRef]
- Nomura, T.; Kanda, T.; Kidokoro, H.; Suehiro, Y.; Yamada, S. Why do children abuse robots? Interact. Stud. 2016, 17, 347–369. [Google Scholar] [CrossRef]
- Lindblom, J. Embodied Social Interaction, Cognitive Systems Monographs (COSMOS); Springer: Berlin, Germany, 2015; Volume 26, ISBN 978-3-319-20315-7. [Google Scholar]
- Preece, J.; Rogers, Y.; Sharp, H. Interaction Design: Beyond Human-Computer Interaction, 4th ed.; John Wiley & Sons: Chichester, UK, 2015; ISBN 978-0-470-66576-3. [Google Scholar]
- Fukuda, H.; Shiomi, M.; Nakagawa, K.; Ueda, K. ‘Midas touch’ in human-robot interaction: Evidence from event-related potentials during the ultimatum game. In Proceedings of the Seventh Annual ACM/IEEE International Conference on Human-Robot Interaction HRI’12, Boston, MA, USA, 5–8 March 2012; pp. 131–132. [Google Scholar] [CrossRef]
- Nakagawa, K.; Shiomi, M.; Shinozawa, K.; Matsumura, R.; Ishiguro, H.; Hagita, N. Effect of robot’s active touch on people’s motivation. In Proceedings of the 6th International Conference on Human-Robot Interaction HRI’11, Lausanne, The Switzerland, 6–9 March 2011; pp. 465–472. [Google Scholar] [CrossRef]
- Alesich, S.; Rigby, M. Gendered robots: Implications for our humanoid future. IEEE Technol. Soc. Mag. 2017, 36, 50–59. [Google Scholar] [CrossRef]
- Geraci, R.M. Robots and the sacred in science and science fiction: Theological implications of artificial intelligence. Zygon 2007, 42, 961–980. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Group of Aspects | Aspects Affecting User Experience and Touch Behavior | Dimensions Along Which the Aspects Vary |
|---|---|---|
| Individual characteristics | To show emotions | Non-emotion showing ↔ High degree of emotion showing |
| To touch others | Do not touch ↔ High degree of touching | |
| Predisposal to robots | Positive ↔ Negative | |
| Ways of thinking | Point of reference: human being | Not human ↔ Human Low attributed human age ↔ High attributed human age |
| Relationship | Low level of intimacy ↔ High level of intimacy Unclear ↔ Clear | |
| Point of reference: softness | Do not imagine softness ↔ Imagine softness | |
| Robot gender | Attribution of female gender ↔ Attribution of male gender | |
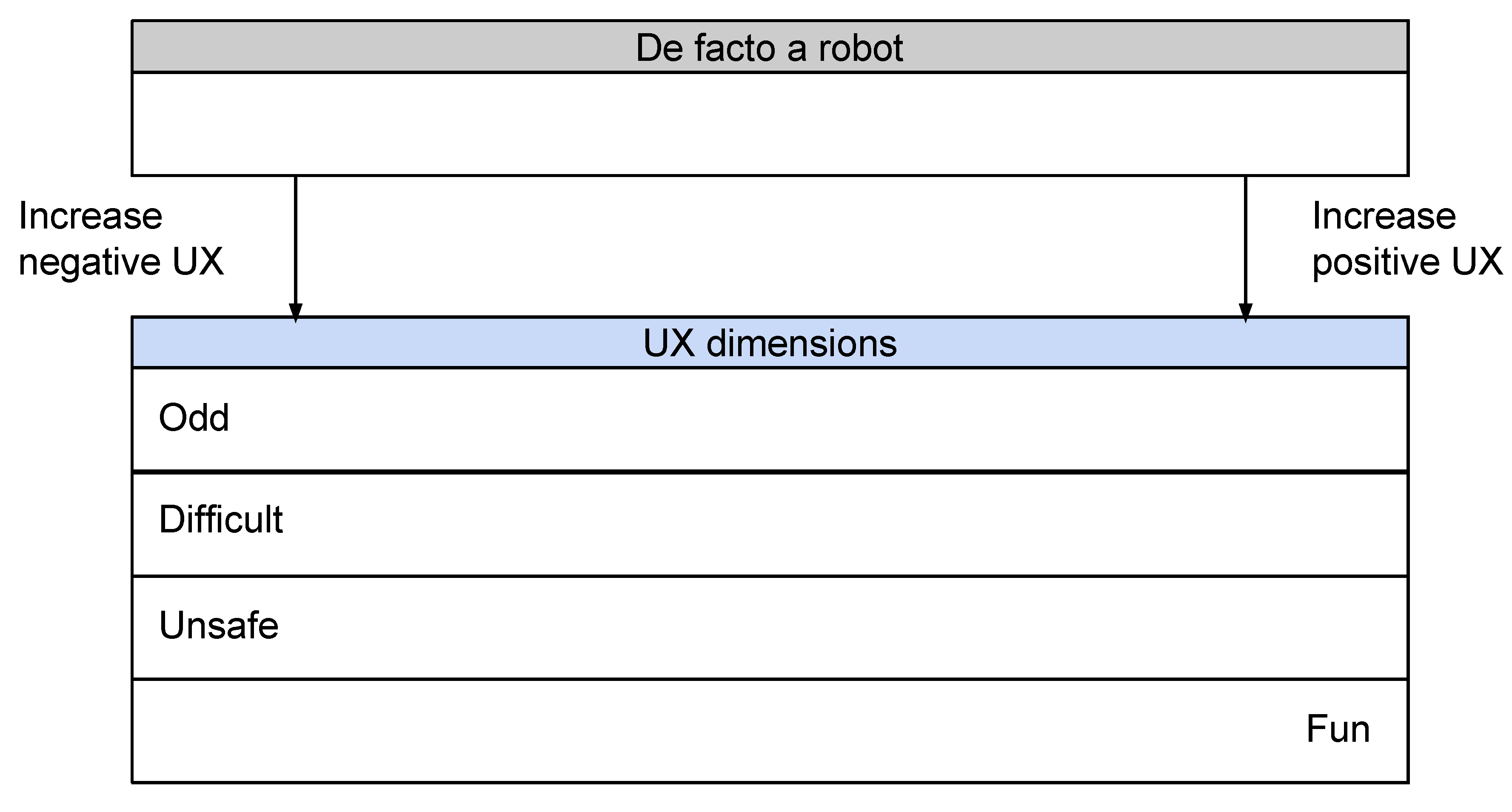
| Robot characteristics | De facto a robot | |
| Size | Small ↔ Large | |
| Surface | Hard ↔ Soft | |
| Fragility | Appear as highly fragile ↔ Appear as not fragile | |
| Task and interaction characteristics | Type of emotion | Negative emotions ↔ Positive emotions Robot gender dependent ↔ Robot gender independent |
| Response | Low degree of responsiveness ↔ High degree of responsiveness | |
| Modality | Single modal ↔ Multi modal | |
| Encounters | First time ↔ Many previous |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alenljung, B.; Andreasson, R.; Lowe, R.; Billing, E.; Lindblom, J. Conveying Emotions by Touch to the Nao Robot: A User Experience Perspective. Multimodal Technol. Interact. 2018, 2, 82. https://doi.org/10.3390/mti2040082
Alenljung B, Andreasson R, Lowe R, Billing E, Lindblom J. Conveying Emotions by Touch to the Nao Robot: A User Experience Perspective. Multimodal Technologies and Interaction. 2018; 2(4):82. https://doi.org/10.3390/mti2040082
Chicago/Turabian StyleAlenljung, Beatrice, Rebecca Andreasson, Robert Lowe, Erik Billing, and Jessica Lindblom. 2018. "Conveying Emotions by Touch to the Nao Robot: A User Experience Perspective" Multimodal Technologies and Interaction 2, no. 4: 82. https://doi.org/10.3390/mti2040082
APA StyleAlenljung, B., Andreasson, R., Lowe, R., Billing, E., & Lindblom, J. (2018). Conveying Emotions by Touch to the Nao Robot: A User Experience Perspective. Multimodal Technologies and Interaction, 2(4), 82. https://doi.org/10.3390/mti2040082