A Survey to Understand Emotional Situations on the Road and What They Mean for Affective Automotive UIs


{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Contribution Statement
3. Related Work
3.1. Detecting Emotions
3.2. Affective Computing
3.3. Interaction With Autonomous Vehicles
3.4. Driver Models
4. Online Survey
4.1. Design and Method
- Demographic data such as age, region, and estimated annual mileage.
- Recollection of a freely chosen emotional experience in the car, which the participant had experienced in the past as a driver while manually driving a car. Depending on the randomly assigned group, this emotion was either positive or negative.
- Detailed questions on the situation, for instance place, circumstances, involved parties.
- Questions on behavior: how could involved people or an intelligent future vehicle have behaved to improve the situation?
4.2. Participants
4.3. Limitations
5. Inductive Coding and Inter-Rater Agreement
6. Results
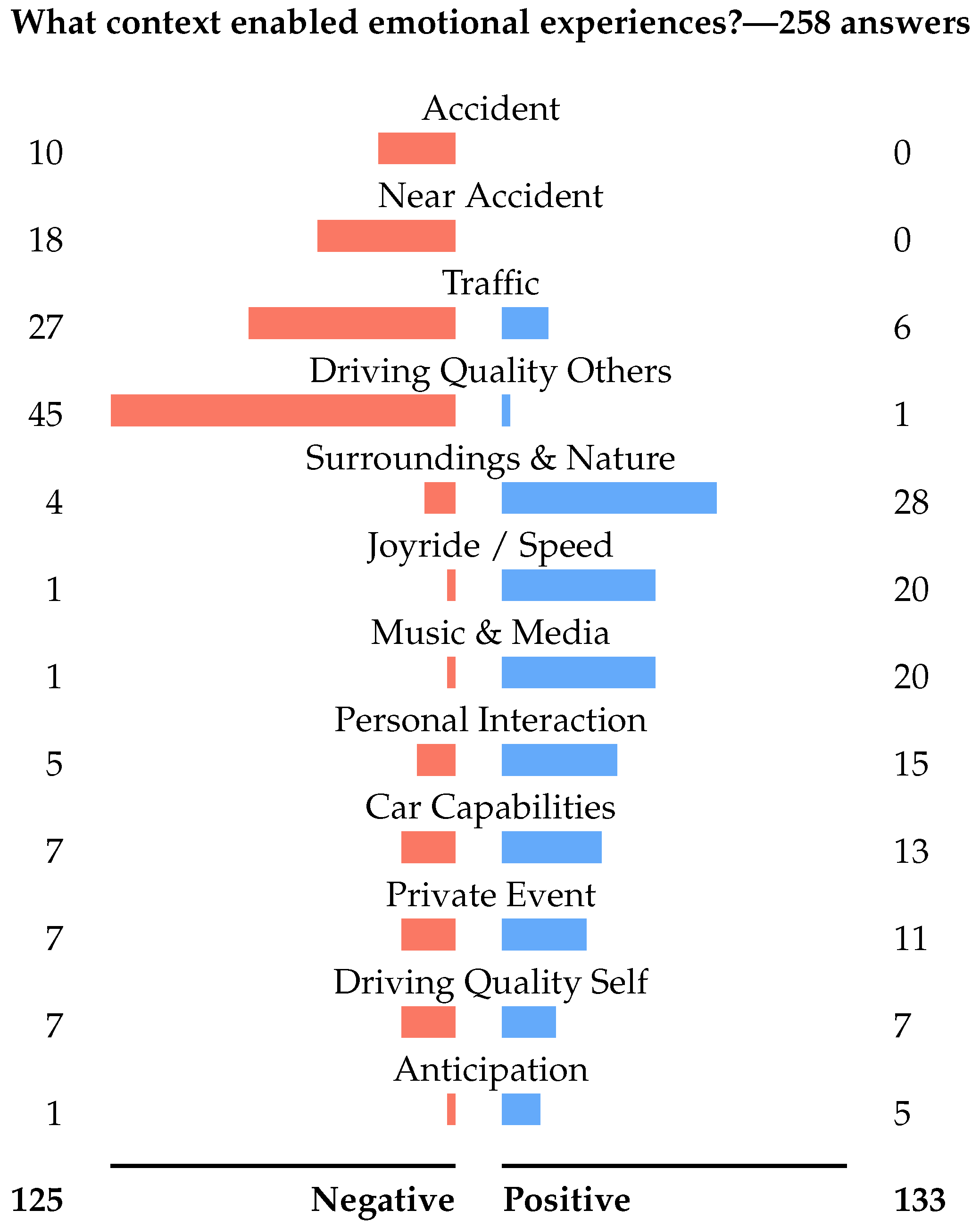
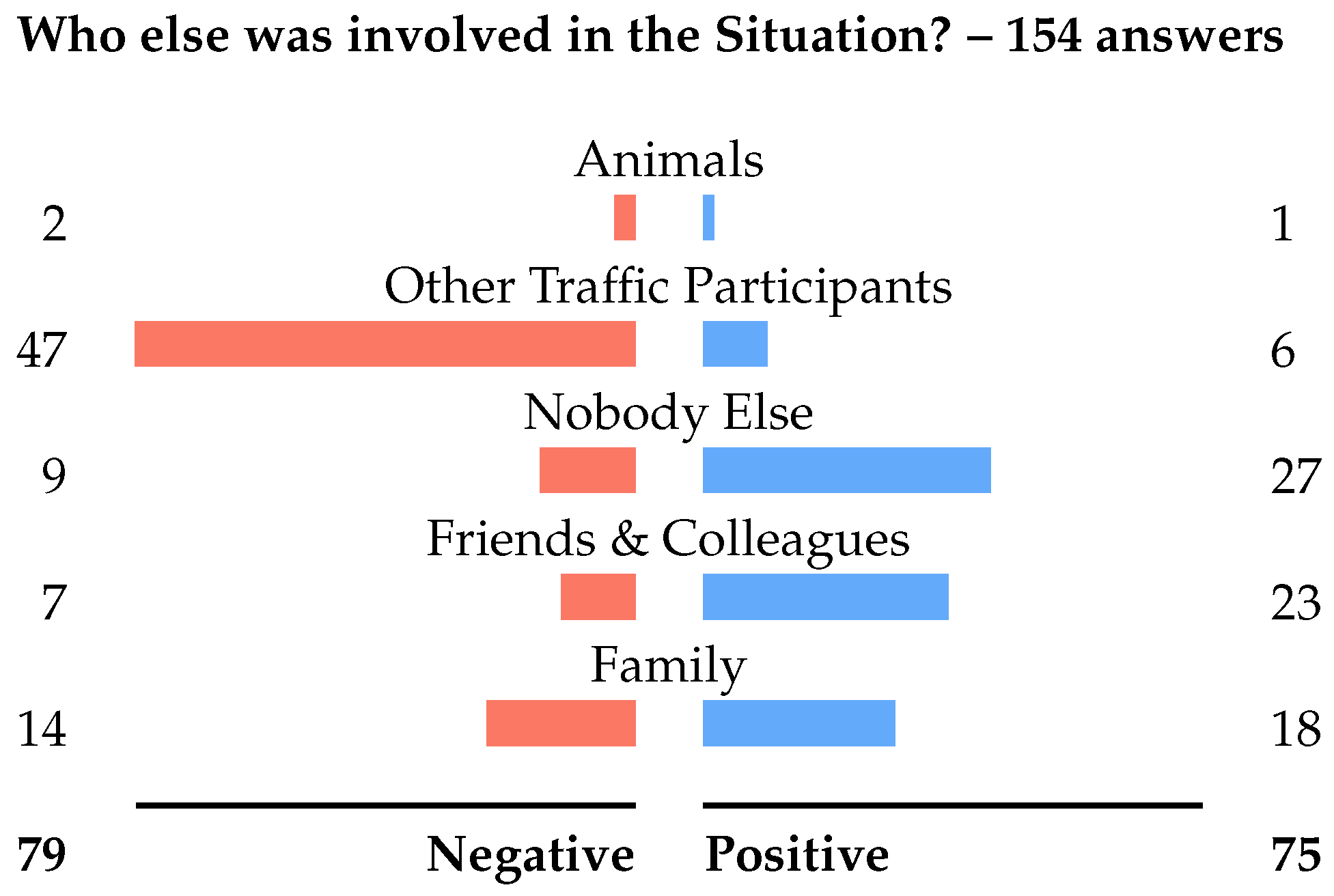
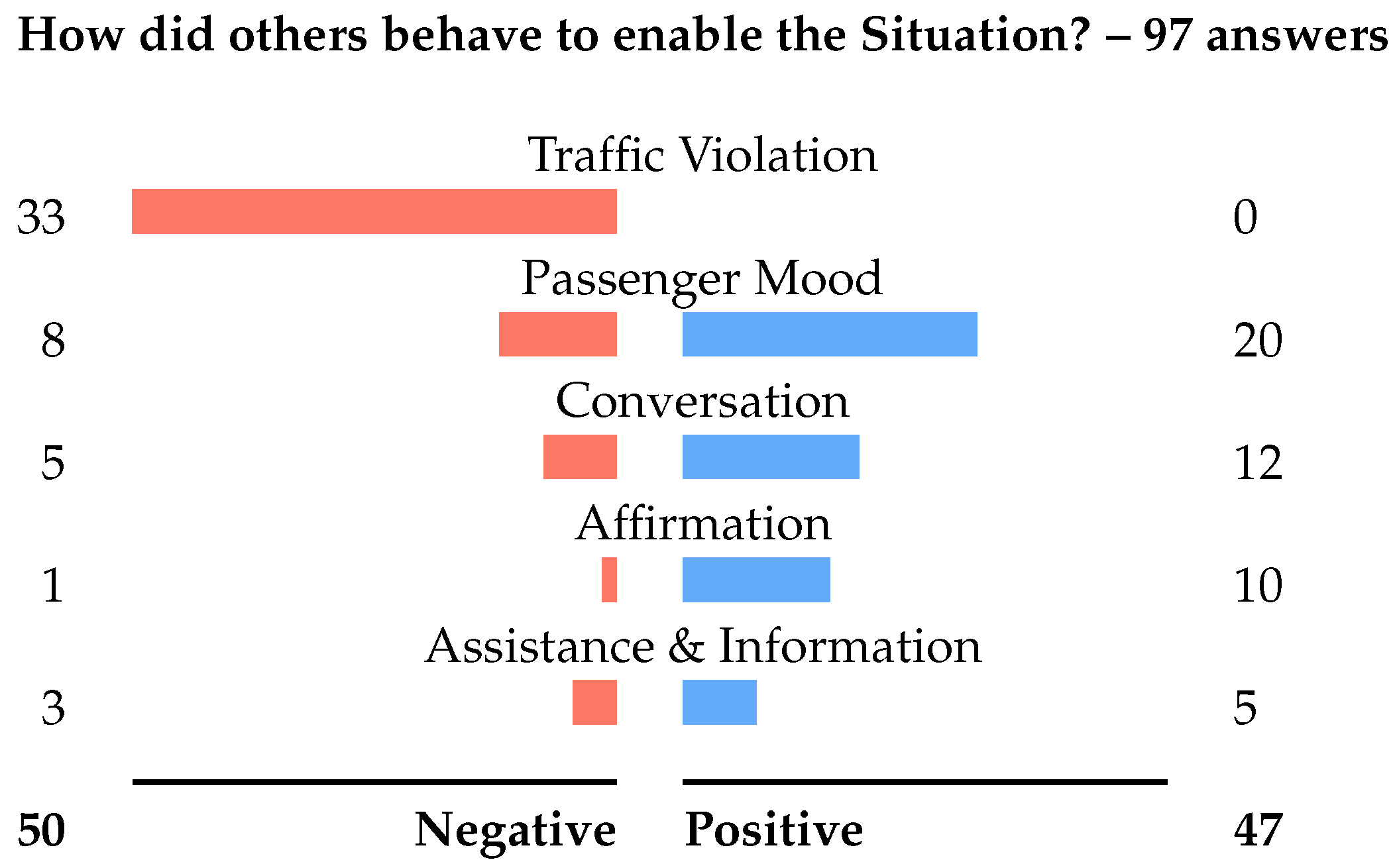
6.1. Triggers of Emotional Situations while Driving
6.2. Users’ Suggestions for Affective Interfaces
7. Design Recommendations for Future Automotive User Interfaces
8. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Islinger, T.; Köhler, T.; Wolff, C. Human Modeling in a Driver Analyzing Context: Challenge and Benefit. In Proceedings of the 3rd International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Salzburg, Austria, 30 November–2 December 2011; ACM: New York, NY, USA, 2011; pp. 99–104. [Google Scholar] [CrossRef]
- Coughlin, J.F.; Reimer, B.; Mehler, B. Monitoring, Managing, and Motivating Driver Safety and Well-Being. IEEE Pervasive Comput. 2011, 10, 14–21. [Google Scholar] [CrossRef]
- SAE. Taxonomy and Definitions for Terms Related to on-Road Motor Vehicle Automated Driving Systems; SAE: Warrendale, PA, USA, 2018; p. 35. [Google Scholar] [CrossRef]
- Miller, D.; Sun, A.; Johns, M.; Ive, H.; Sirkin, D.; Aich, S.; Ju, W. Distraction Becomes Engagement in Automated Driving. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2015, 59, 1676–1680. [Google Scholar] [CrossRef]
- Eyben, F.; Wöllmer, M.; Poitschke, T.; Schuller, B.; Blaschke, C.; Färber, B.; Nguyen-Thien, N. Emotion on the Road: Necessity, Acceptance, and Feasibility of Affective Computing in the Car. Adv. Hum.-Comp. Interact. 2010, 2010, 5. [Google Scholar] [CrossRef]
- Fakhrhosseini, S.M.; Landry, S.; Tan, Y.Y.; Bhattarai, S.; Jeon, M. If You’Re Angry, Turn the Music on: Music Can Mitigate Anger Effects on Driving Performance. In Proceedings of the 6th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Seattle, WA, USA, 17–19 September 2014; ACM: New York, NY, USA, 2014; pp. 18:1–18:7. [Google Scholar] [CrossRef]
- Jeon, M.; Yim, J.B.; Walker, B.N. An Angry Driver is Not the Same As a Fearful Driver: Effects of Specific Negative Emotions on Risk Perception, Driving Performance, and Workload. In Proceedings of the 3rd International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Salzburg, Austria, 30 November–2 December 2011; ACM: New York, NY, USA, 2011; pp. 137–142. [Google Scholar] [CrossRef]
- Zimasa, T.; Jamson, S.; Henson, B. Are happy drivers safer drivers? Evidence from hazard response times and eye tracking data. Transp. Res. Part F Traffic Psychol. Behav. 2017, 46, 14–23. [Google Scholar] [CrossRef]
- Jeon, M.; Walker, B.N. What to detect? Analyzing Factor Structures of Affect in Driving Contexts for an Emotion Detection and Regulation System. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2011, 55, 1889–1893. [Google Scholar] [CrossRef]
- Riener, A.; Jeon, M.; Alvarez, I.; Frison, A.K. Driver in the Loop: Best Practices in Automotive Sensing and Feedback Mechanisms. In Automotive User Interfaces: Creating Interactive Experiences in the Car; Meixner, G., Müller, C., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 295–323. [Google Scholar] [CrossRef]
- Abraham, H.; Reimer, B.; Seppelt, B.; Fitzgerald, C.; Mehler, B.; Coughlin, J.F. Consumer Interest in Automation: Preliminary Observations Exploring a Year’s Change; Technical Report 2017-2; Massachusetts Institute of Technology AgeLab: Cambridge, MA, USA, 2017. [Google Scholar]
- Scott-Parker, B. Emotions, behaviour, and the adolescent driver: A literature review. Transp. Res. Part F Traffic Psychol. Behav. 2017, 50, 1–37. [Google Scholar] [CrossRef]
- Kun, A.L.; Paek, T.; Medenica, V.; Memarović, N.; Palinko, O. Glancing at Personal Navigation Devices Can Affect Driving: Experimental Results and Design Implications. In Proceedings of the 1st International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Essen, Germany, 21–22 September 2009; ACM: New York, NY, USA, 2009; pp. 129–136. [Google Scholar] [CrossRef]
- Tchankue, P.; Wesson, J.; Vogts, D. The Impact of an Adaptive User Interface on Reducing Driver Distraction. In Proceedings of the 3rd International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Salzburg, Austria, 30 November–2 December 2011; ACM: New York, NY, USA, 2011; pp. 87–94. [Google Scholar] [CrossRef]
- National Highway Traffic Safety Administration. Visual-Manual NHTSA Driver Distraction Guidelines for in-Vehicle Electronic Devices; National Highway Traffic Safety Administration (NHTSA), Department of Transportation (DOT): Washington, DC, USA, 2012.
- Roider, F.; Rümelin, S.; Pfleging, B.; Gross, T. The Effects of Situational Demands on Gaze, Speech and Gesture Input in the Vehicle. In Proceedings of the 9th ACM International Conference on Automotive User Interfaces and Vehicular Applications, Oldenburg, Germany, 24–27 September 2017; ACM: New York, NY, USA, 2017. [Google Scholar] [CrossRef]
- Meschtscherjakov, A.; Wilfinger, D.; Scherndl, T.; Tscheligi, M. Acceptance of Future Persuasive In-car Interfaces towards a More Economic Driving Behaviour. In Proceedings of the 1st International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Essen, Germany, 21–22 September 2009; ACM: New York, NY, USA, 2009; pp. 81–88. [Google Scholar] [CrossRef]
- Knobel, M.; Hassenzahl, M.; Männlein, S.; Lamara, M.; Schumann, J.; Eckoldt, K.; Laschke, M.; Butz, A. Become a Member of the Last Gentlemen: Designing for Prosocial Driving. In Proceedings of the 6th International Conference on Designing Pleasurable Products and Interfaces, Newcastle upon Tyne, UK, 3–5 September 2013; ACM: New York, NY, USA, 2013; pp. 60–66. [Google Scholar] [CrossRef]
- Kumar, M.; Kim, T. Dynamic Speedometer: Dashboard Redesign to Discourage Drivers from Speeding. In Proceedings of the CHI ’05 Extended Abstracts on Human Factors in Computing Systems, Portland, OR, USA, 2–7 April 2005; ACM: New York, NY, USA, 2005; pp. 1573–1576. [Google Scholar] [CrossRef]
- Nass, C.; Jonsson, I.M.; Harris, H.; Reaves, B.; Endo, J.; Brave, S.; Takayama, L. Improving Automotive Safety by Pairing Driver Emotion and Car Voice Emotion. In Proceedings of the CHI ’05 Extended Abstracts on Human Factors in Computing Systems, Portland, OR, USA, 2–7 April 2005; ACM: New York, NY, USA, 2005; pp. 1973–1976. [Google Scholar] [CrossRef]
- Velusamy, S.; Kannan, H.; Anand, B.; Sharma, A.; Navathe, B. A method to infer emotions from facial Action Units. In Proceedings of the 2011 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Prague, Czech Republic, 22–27 May 2011; IEEE: Prague, Czech Republic, 2011; pp. 2028–2031. [Google Scholar] [CrossRef]
- Hoch, S.; Althoff, F.; McGlaun, G.; Rigoll, G. Bimodal fusion of emotional data in an automotive environment. In Proceedings of the 2005 IEEE International Conference on Acoustics, Speech, and Signal Processing, Philadelphia, PA, USA, 18–23 March 2005; IEEE: Philadelphia, PA, USA, 2005; Volume 2, pp. ii/1085–ii/1088. [Google Scholar] [CrossRef]
- Melnicuk, V.; Birrell, S.; Crundall, E.; Jennings, P. Towards hybrid driver state monitoring: Review, future perspectives and the role of consumer electronics. In Proceedings of the 2016 IEEE Intelligent Vehicles Symposium (IV), Gothenburg, Sweden, 19–22 June 2016; IEEE: Gothenburg, Sweden, 2016; pp. 1392–1397. [Google Scholar] [CrossRef]
- Braun, M. Are Autonomous Vehicles The Sentient Robots We Were Promised? In Proceedings of the CHI ’18 Workshop: Interacting with Autonomous Vehicles: Learning from other Domains, Montreal, QC, Canada, 21–26 April 2018; ACM: New York, NY, USA, 2018. [Google Scholar]
- Pantic, M.; Sebe, N.; Cohn, J.F.; Huang, T. Affective Multimodal Human-computer Interaction. In Proceedings of the 13th Annual ACM International Conference on Multimedia, Singapore, 6–12 November 2005; ACM: New York, NY, USA, 2005; pp. 669–676. [Google Scholar] [CrossRef]
- Kushlev, K.; Cardoso, B.; Pielot, M. Too Tense for Candy Crush: Affect Influences User Engagement with Proactively Suggested Content. In Proceedings of the 19th International Conference on Human-Computer Interaction with Mobile Devices and Services, Singapore, 9–12 September 2017; ACM: New York, NY, USA, 2017; pp. 13:1–13:6. [Google Scholar] [CrossRef]
- Slovák, P.; Tennent, P.; Reeves, S.; Fitzpatrick, G. Exploring Skin Conductance Synchronisation in Everyday Interactions. In Proceedings of the 8th Nordic Conference on Human-Computer Interaction: Fun, Fast, Foundational, Helsinki, Finland, 26–30 October 2014; ACM: New York, NY, USA, 2014; pp. 511–520. [Google Scholar] [CrossRef]
- Riener, A.; Ferscha, A.; Aly, M. Heart on the Road: HRV Analysis for Monitoring a Driver’s Affective State. In Proceedings of the 1st International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Essen, Germany, 21–22 September 2009; ACM: New York, NY, USA, 2009; pp. 99–106. [Google Scholar] [CrossRef]
- Schmidt, A.; Beigl, M.; Gellersen, H.W. There is more to context than location. Comput. Gr. 1999, 23, 893–901. [Google Scholar] [CrossRef]
- Wickens, C.M.; Wiesenthal, D.L.; Flora, D.B.; Flett, G.L. Understanding driver anger and aggression: Attributional theory in the driving environment. J. Exp. Psychol. Appl. 2011, 17, 354–370. [Google Scholar] [CrossRef] [PubMed]
- Rödel, C.; Stadler, S.; Meschtscherjakov, A.; Tscheligi, M. Towards Autonomous Cars: The Effect of Autonomy Levels on Acceptance and User Experience. In Proceedings of the 6th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Seattle, WA, USA, 17–19 September 2014; ACM: New York, NY, USA, 2014; pp. 11:1–11:8. [Google Scholar] [CrossRef]
- Lenorovitz, J. How in the World Did We Ever Get into That Mode? Mode Error and Awareness in Supervisory Control. Hum. Factors 1995, 37, 5–19. [Google Scholar] [CrossRef]
- Endsley, M.R.; Kiris, E.O. The Out-of-the-Loop Performance Problem and Level of Control in Automation. Hum. Factors 1995, 37, 381–394. [Google Scholar] [CrossRef]
- Koo, J.; Kwac, J.; Ju, W.; Steinert, M.; Leifer, L.; Nass, C. Why did my car just do that? Explaining semi-autonomous driving actions to improve driver understanding, trust, and performance. Int. J. Interact. Des. Manuf. 2015, 9, 269–275. [Google Scholar] [CrossRef]
- Kerschbaum, P.; Lorenz, L.; Hergeth, S.; Bengler, K. Designing the human-machine interface for highly automated cars—Challenges, exemplary concepts and studies. In Proceedings of the 2015 IEEE International Workshop on Advanced Robotics and its Social Impacts (ARSO), Lyon, France, 1–3 July 2015; IEEE: Lyon, France, 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Kun, A.L.; Boll, S.; Schmidt, A. Shifting Gears: User Interfaces in the Age of Autonomous Driving. IEEE Pervasive Comput. 2016, 15, 32–38. [Google Scholar] [CrossRef]
- Das, S.; Sekar, A.; Chen, R.; Kim, H.C.; Wallington, T.J.; Williams, E. Impacts of Autonomous Vehicles on Consumers Time-Use Patterns. Challenges 2017, 8, 32. [Google Scholar] [CrossRef]
- Helldin, T.; Falkman, G.; Riveiro, M.; Davidsson, S. Presenting System Uncertainty in Automotive UIs for Supporting Trust Calibration in Autonomous Driving. In Proceedings of the 5th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Eindhoven, The Netherlands, 28–30 October 2013; ACM: New York, NY, USA, 2013; pp. 210–217. [Google Scholar] [CrossRef]
- Schroeter, R.; Steinberger, F. PokÉMon DRIVE: Towards Increased Situational Awareness in Semi-automated Driving. In Proceedings of the 28th Australian Conference on Computer-Human Interaction, Launceston, Australia, 29 November–2 December 2016; ACM: New York, NY, USA, 2016; pp. 25–29. [Google Scholar] [CrossRef]
- Ive, H.P.; Sirkin, D.; Miller, D.; Li, J.; Ju, W. “Don’T Make Me Turn This Seat Around!”: Driver and Passenger Activities and Positions in Autonomous Cars. In Proceedings of the 7th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Nottingham, UK, 1–3 September 2015; ACM: New York, NY, USA, 2015; pp. 50–55. [Google Scholar] [CrossRef]
- Osswald, S.; Sundström, P.; Tscheligi, M. The Front Seat Passenger: How to Transfer Qualitative Findings into Design. Int. J. Veh. Technol. 2013. [Google Scholar] [CrossRef]
- Wilfinger, D.; Meschtscherjakov, A.; Murer, M.; Osswald, S.; Tscheligi, M. Are We There Yet? A Probing Study to Inform Design for the Rear Seat of Family Cars. In Proceedings of the Human-Computer Interaction— INTERACT 2011: 13th IFIP TC 13 International Conference, Lisbon, Portugal, 5–9 September 2011, Part II; Campos, P., Graham, N., Jorge, J., Nunes, N., Palanque, P., Winckler, M., Eds.; Springer: Berlin/Heidelberg, Germany, 2011; pp. 657–674. [Google Scholar] [CrossRef]
- Ferati, M.; Murano, P.; Anthony Giannoumis, G. Universal Design of User Interfaces in Self-driving Cars. In Advances in Design for Inclusion; Di Bucchianico, G., Kercher, P.F., Eds.; Springer International Publishing: Cham, Switzerland, 2018; pp. 220–228. [Google Scholar]
- Voinescu, A.; Morgan, P.L.; Alford, C.; Caleb-Solly, P. Investigating Older Adults’ Preferences for Functions Within a Human-Machine Interface Designed for Fully Autonomous Vehicles. In Human Aspects of IT for the Aged Population. Applications in Health, Assistance, and Entertainment; Zhou, J., Salvendy, G., Eds.; Springer International Publishing: Cham, Switzerland, 2018; pp. 445–462. [Google Scholar]
- Fagnant, D.J.; Kockelman, K. Preparing a nation for autonomous vehicles: Opportunities, barriers and policy recommendations. Transp. Res. Part A Policy Pract. 2015, 77, 167–181. [Google Scholar] [CrossRef]
- Knobel, M.; Hassenzahl, M.; Lamara, M.; Sattler, T.; Schumann, J.; Eckoldt, K.; Butz, A. Clique Trip: Feeling Related in Different Cars. In Proceedings of the Designing Interactive Systems Conference 2012, Newcastle Upon Tyne, UK, 11–15 June 2012; ACM: New York, NY, USA, 2012; pp. 29–37. [Google Scholar] [CrossRef]
- Wang, C.; Terken, J.; Hu, J.; Rauterberg, M. “Likes” and “Dislikes” on the Road: A Social Feedback System for Improving Driving Behavior. In Proceedings of the 8th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Ann Arbor, MI, USA, 24–26 October 2016; ACM: New York, NY, USA, 2016; pp. 43–50. [Google Scholar] [CrossRef]
- Baber, J.; Kolodko, J.; Noel, T.; Parent, M.; Vlacic, L. Cooperative autonomous driving: Intelligent vehicles sharing city roads. IEEE Robot. Autom. Mag. 2005, 12, 44–49. [Google Scholar] [CrossRef]
- Macadam, C.C. Understanding and Modeling the Human Driver. Veh. Syst. Dyn. 2003, 40, 101–134. [Google Scholar] [CrossRef]
- Yan, S.; Tran, C.C.; Wei, Y.; Habiyaremye, J.L. Driver’s Mental Workload Prediction Model Based on Physiological Indices. Int. J. Occup. Saf. Ergon. 2017, 1–9. [Google Scholar] [CrossRef] [PubMed]
- Taylor, T.; Pradhan, A.; Divekar, G.; Romoser, M.; Muttart, J.; Gomez, R.; Pollatsek, A.; Fisher, D. The view from the road: The contribution of on-road glance-monitoring technologies to understanding driver behavior. Accid. Anal. Prev. 2013, 58, 175–186. [Google Scholar] [CrossRef] [PubMed]
- Kamaruddin, N.; Wahab, A. Driver behavior analysis through speech emotion understanding. In Proceedings of the 2010 IEEE Intelligent Vehicles Symposium, San Diego, CA, USA, 21–24 June 2010; IEEE: San Diego, CA, USA, 2010; pp. 238–243. [Google Scholar] [CrossRef]
- Inagaki, T. Towards Monitoring and Modelling for Situation-Adaptive Driver Assist Systems. In Modelling Driver Behaviour in Automotive Environments: Critical Issues in Driver Interactions with Intelligent Transport Systems; Cacciabue, P.C., Ed.; Springer: London, UK, 2007; pp. 43–57. [Google Scholar] [CrossRef]
- Kuffner, W.; Würtenberger, M.; Wisselmann, D.; Gentner, H.; Rau, R. Hände Weg vom Steuer! ATZagenda 2012, 1, 62–65. [Google Scholar] [CrossRef]
- Keltner, D.; Haidt, J. Social Functions of Emotions at Four Levels of Analysis. Cogn. Emot. 1999, 13, 505–521. [Google Scholar] [CrossRef]
- Little, L.; Briggs, P. Private whispers/public eyes: Is receiving highly personal information in a public place stressful? Interact. Comput. 2009, 21, 316–322. [Google Scholar] [CrossRef]
- Marques, D.; Guerreiro, T.; Carriço, L. Measuring Snooping Behavior with Surveys: It’s How You Ask It. In Proceedings of the CHI ’14 Extended Abstracts on Human Factors in Computing Systems, Toronto, ON, Canada, 26 April–1 May 2014; ACM: New York, NY, USA, 2014; pp. 2479–2484. [Google Scholar] [CrossRef]
- Eiband, M.; Khamis, M.; von Zezschwitz, E.; Hussmann, H.; Alt, F. Understanding Shoulder Surfing in the Wild: Stories from Users and Observers. In Proceedings of the 2017 CHI Conference on Human Factors in Computing Systems, Denver, CO, USA, 6–11 May 2017; ACM: New York, NY, USA, 2017; pp. 4254–4265. [Google Scholar] [CrossRef]
- Simmons, A.; Hoon, L. Agree to Disagree: On Labelling Helpful App Reviews. In Proceedings of the 28th Australian Conference on Computer-Human Interaction, Launceston, Australia, 29 November 29–2 December 2016; ACM: New York, NY, USA, 2016; pp. 416–420. [Google Scholar] [CrossRef]
- Adams, A.; Sasse, M.A. Users Are Not the Enemy. Commun. ACM 1999, 42, 40–46. [Google Scholar] [CrossRef]
- Paulhus, D.L.; Vazire, S. The self-report method. In Handbook of Research Methods in Personality Psychology; Robins, R.W., Fraley, R.C., Krueger, R.F., Eds.; Guilford Press: New York, NY, USA, 2007; pp. 224–239. [Google Scholar]
- Vazire, S.; Mehl, M.R. Knowing me, knowing you: The accuracy and unique predictive validity of self-ratings and other-ratings of daily behavior. J. Personal. Soc. Psychol. 2008, 95, 1202. [Google Scholar] [CrossRef] [PubMed]
- Braun, V.; Clarke, V. Using thematic analysis in psychology. Qual. Res. Psychol. 2006, 3, 77–101. [Google Scholar] [CrossRef]
- Cohen, J. A Coefficient of Agreement for Nominal Scales. Educ. Psychol. Meas. 1960, 20, 37–46. [Google Scholar] [CrossRef]
- Dewey, M.E. Coefficients of Agreement. Br. J. Psychiatry 1983, 143, 487–489. [Google Scholar] [CrossRef] [PubMed]
- Landis, J.R.; Koch, G.G. The Measurement of Observer Agreement for Categorical Data. Biometrics 1977, 33, 159–174. [Google Scholar] [CrossRef] [PubMed]
- Hallgren, K.A. Computing Inter-Rater Reliability for Observational Data: An Overview and Tutorial. Tutor. Quant. Methods Psychol. 2012, 8, 23–34. [Google Scholar] [CrossRef] [PubMed]
- Kaiser, H.F. A second generation little jiffy. Psychometrika 1970, 35, 401–415. [Google Scholar] [CrossRef]
- Pfleging, B.; Schneegass, S.; Meschtscherjakov, A.; Tscheligi, M. Experience Maps: Experience-Enhanced Routes for Car Navigation. In Proceedings of the 6th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Seattle, WA, USA, 17–19 September 2014; ACM: New York, NY, USA, 2014; pp. 1–6. [Google Scholar] [CrossRef]
- Bosch, E.; Oehl, M.; Jeon, M.; Alvarez, I.; Healey, J.; Ju, W.; Jallais, C. Emotional GaRage: A Workshop on In-Car Emotion Recognition and Regulation. In Proceedings of the 10th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Toronto, ON, Canada, 23–25 September 2018; ACM: New York, NY, USA, 2018; pp. 44–49. [Google Scholar] [CrossRef]
- Lennon, A.; Watson, B. “Teaching them a lesson?” A qualitative exploration of underlying motivations for driver aggression. Accid. Anal. Prev. 2011, 43, 2200–2208. [Google Scholar] [CrossRef] [PubMed]
- Hu, T.Y.; Xie, X.; Li, J. Negative or positive? The effect of emotion and mood on risky driving. Transp. Res. Part F Traffic Psychol. Behav. 2013, 16, 29–40. [Google Scholar] [CrossRef]
- Weber, M. Automotive Emotions: A Human-centred Approach Towards The Measurement and Understanding of Drivers’ Emotions And Their Triggers. Ph.D. Thesis, Brunel University, London, UK, 2018. [Google Scholar]
- Vasey, E.; Ko, S.; Jeon, M. In-Vehicle Affect Detection System: Identification of Emotional Arousal by Monitoring the Driver and Driving Style. In Proceedings of the 10th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Toronto, ON, Canada, 23–25 September 2018; ACM: New York, NY, USA, 2018; pp. 243–247. [Google Scholar] [CrossRef]
- Wang, C.; Terken, J.; Yu, B.; Hu, J. Reducing Driving Violations by Receiving Feedback from Other Drivers. In Proceedings of the 7th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Nottingham, UK, 1–3 September 2015; ACM: New York, NY, USA, 2015; pp. 62–67. [Google Scholar] [CrossRef]
- Bader, R.; Siegmund, O.; Woerndl, W. A Study on User Acceptance of Proactive In-Vehicle Recommender Systems. In Proceedings of the 3rd International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Salzburg, Austria, 30 November–2 December 2011; ACM: New York, NY, USA, 2011; pp. 47–54. [Google Scholar] [CrossRef]
- Lessne, G.; Venkatesan, M. Reactance Theory in Consumer Research: the Past, Present and Future. ACR Adv. Consum. Res. 1989, 16, 76–78. [Google Scholar]
- United Nations General Assembly. Resolution Adopted by the General Assembly on 25 September 2015: Transforming Our World: The 2030 Agenda for Sustainable Development; United Nations General Assembly: New York, NY, USA, 2015. [Google Scholar]
- Bouwman, H.; Carlsson, C.; Carlsson, J.; Nikou, S.; Sell, A.; Walden, P. How Nokia failed to nail the Smartphone market. In Proceedings of the 25th European Regional Conference of the International Telecommunications Society (ITS), Brussels, Belgium, 22–25 June 2014; International Telecommunications Society (ITS): Brussels, Belgium, 2014. [Google Scholar]




© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Braun, M.; Pfleging, B.; Alt, F. A Survey to Understand Emotional Situations on the Road and What They Mean for Affective Automotive UIs. Multimodal Technol. Interact. 2018, 2, 75. https://doi.org/10.3390/mti2040075
Braun M, Pfleging B, Alt F. A Survey to Understand Emotional Situations on the Road and What They Mean for Affective Automotive UIs. Multimodal Technologies and Interaction. 2018; 2(4):75. https://doi.org/10.3390/mti2040075
Chicago/Turabian StyleBraun, Michael, Bastian Pfleging, and Florian Alt. 2018. "A Survey to Understand Emotional Situations on the Road and What They Mean for Affective Automotive UIs" Multimodal Technologies and Interaction 2, no. 4: 75. https://doi.org/10.3390/mti2040075
APA StyleBraun, M., Pfleging, B., & Alt, F. (2018). A Survey to Understand Emotional Situations on the Road and What They Mean for Affective Automotive UIs. Multimodal Technologies and Interaction, 2(4), 75. https://doi.org/10.3390/mti2040075