
3D LiDAR Scanning of Urban Forest Structure Using a Consumer Tablet



Abstract
:
1. Introduction
2. Materials and Methods
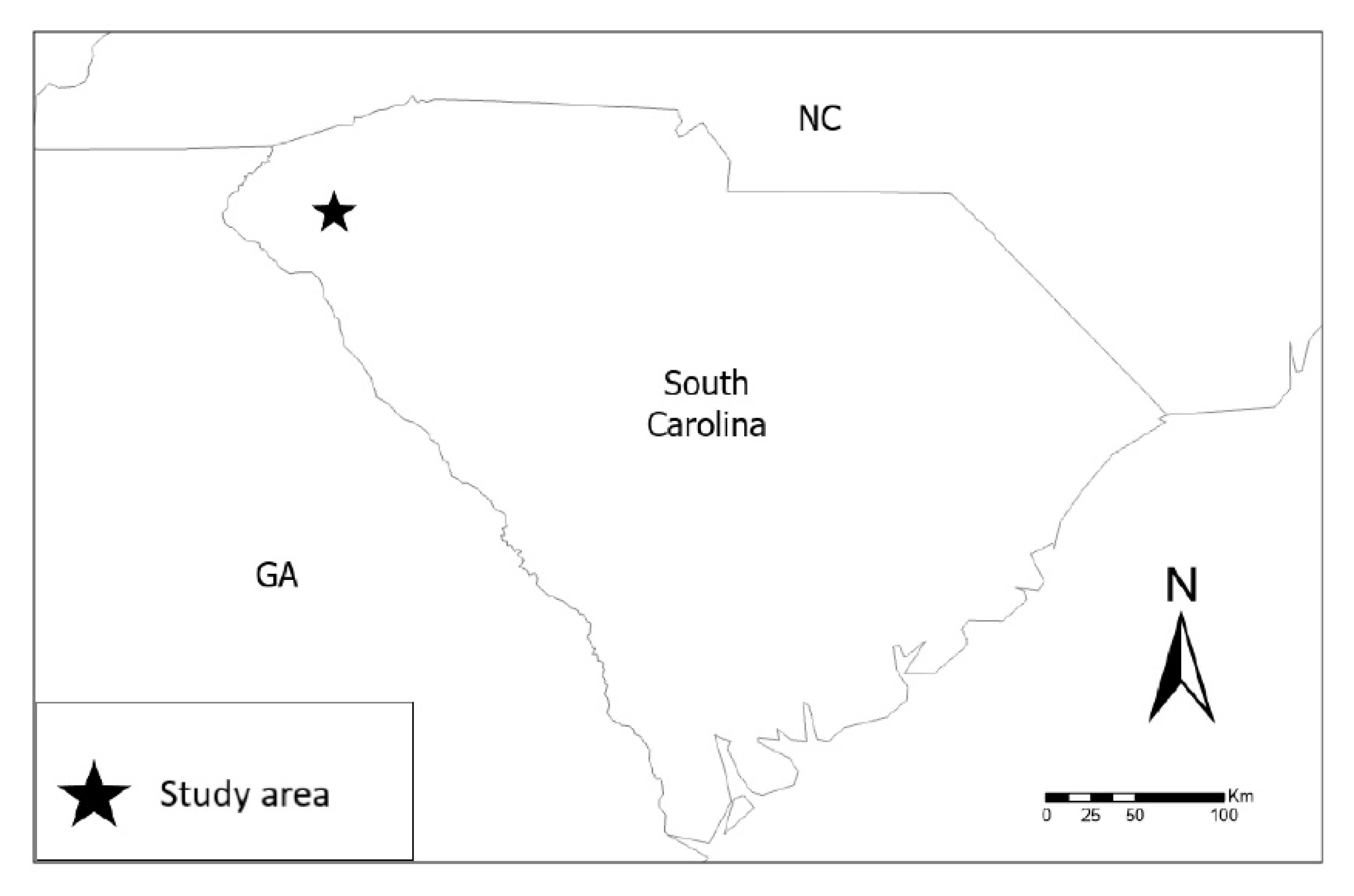
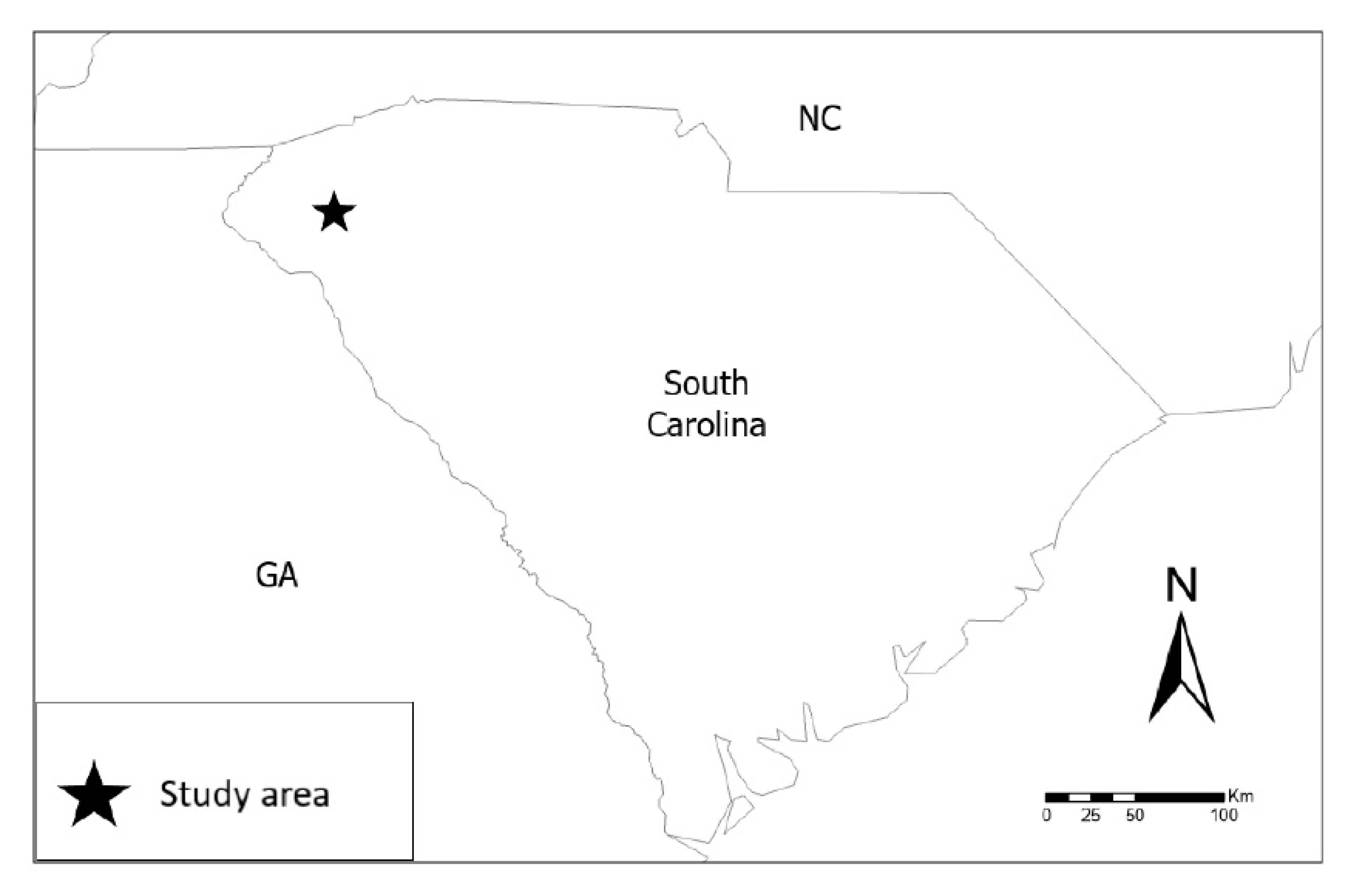
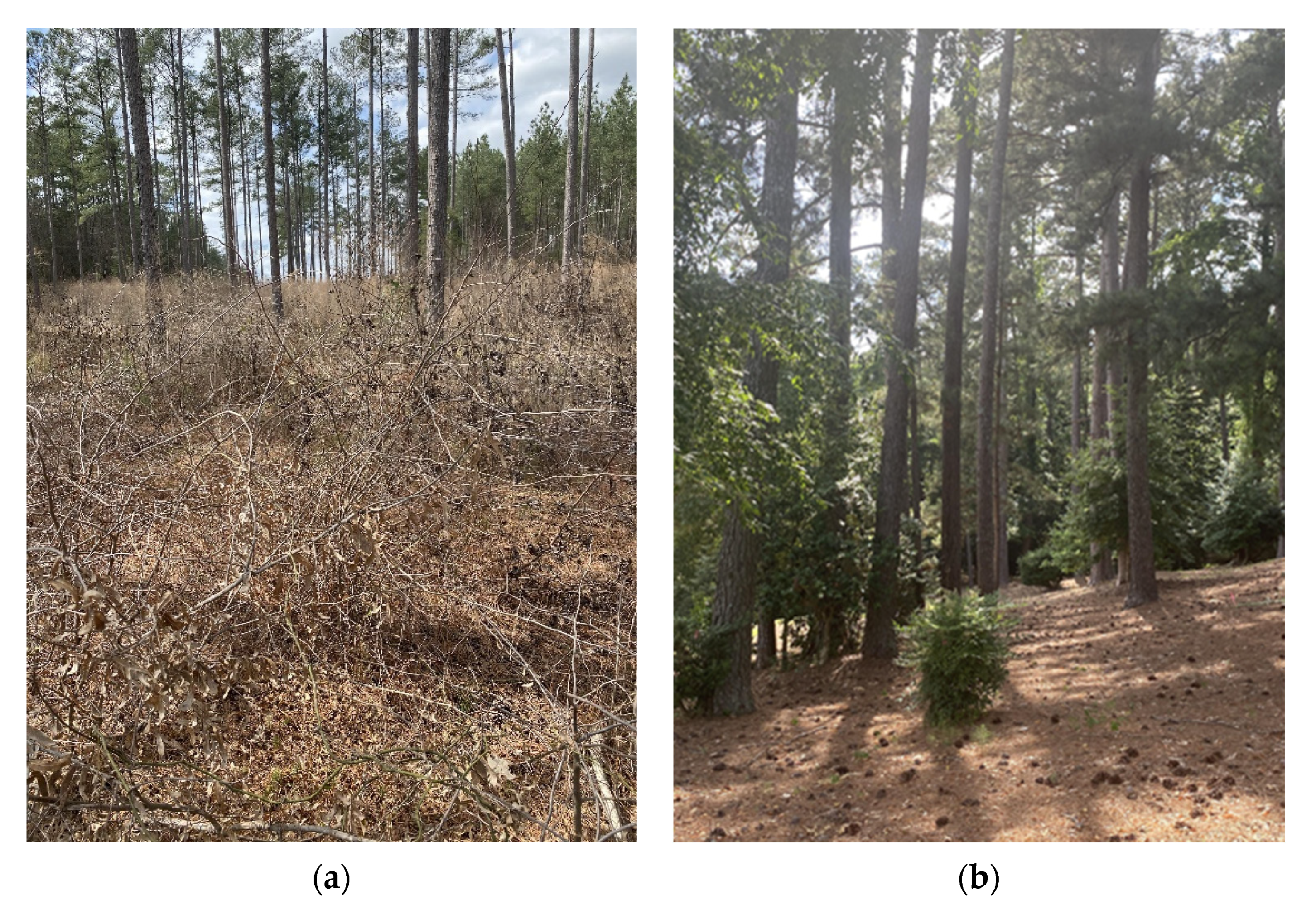
2.1. Study Area
2.2. Field Measurements
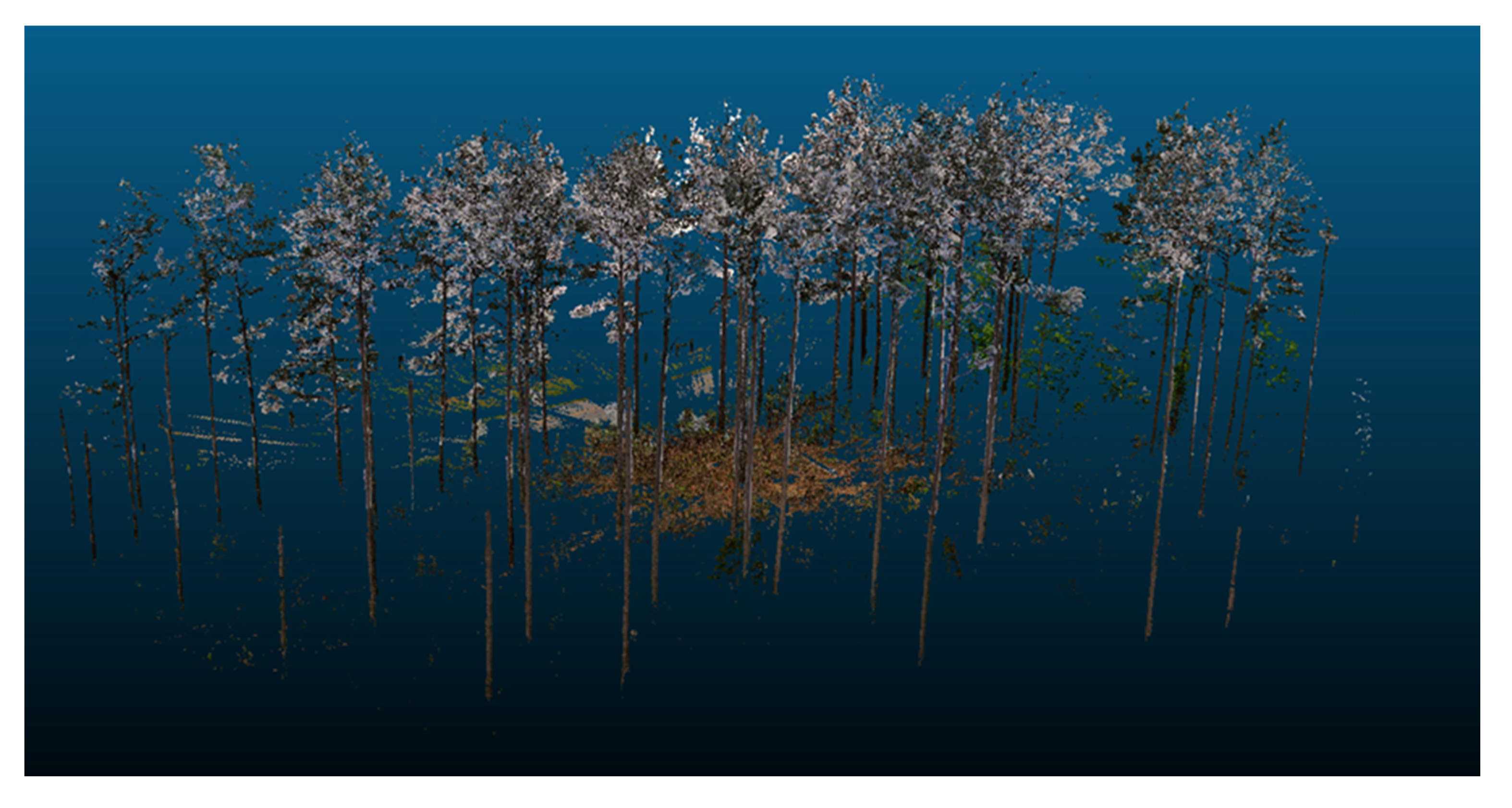
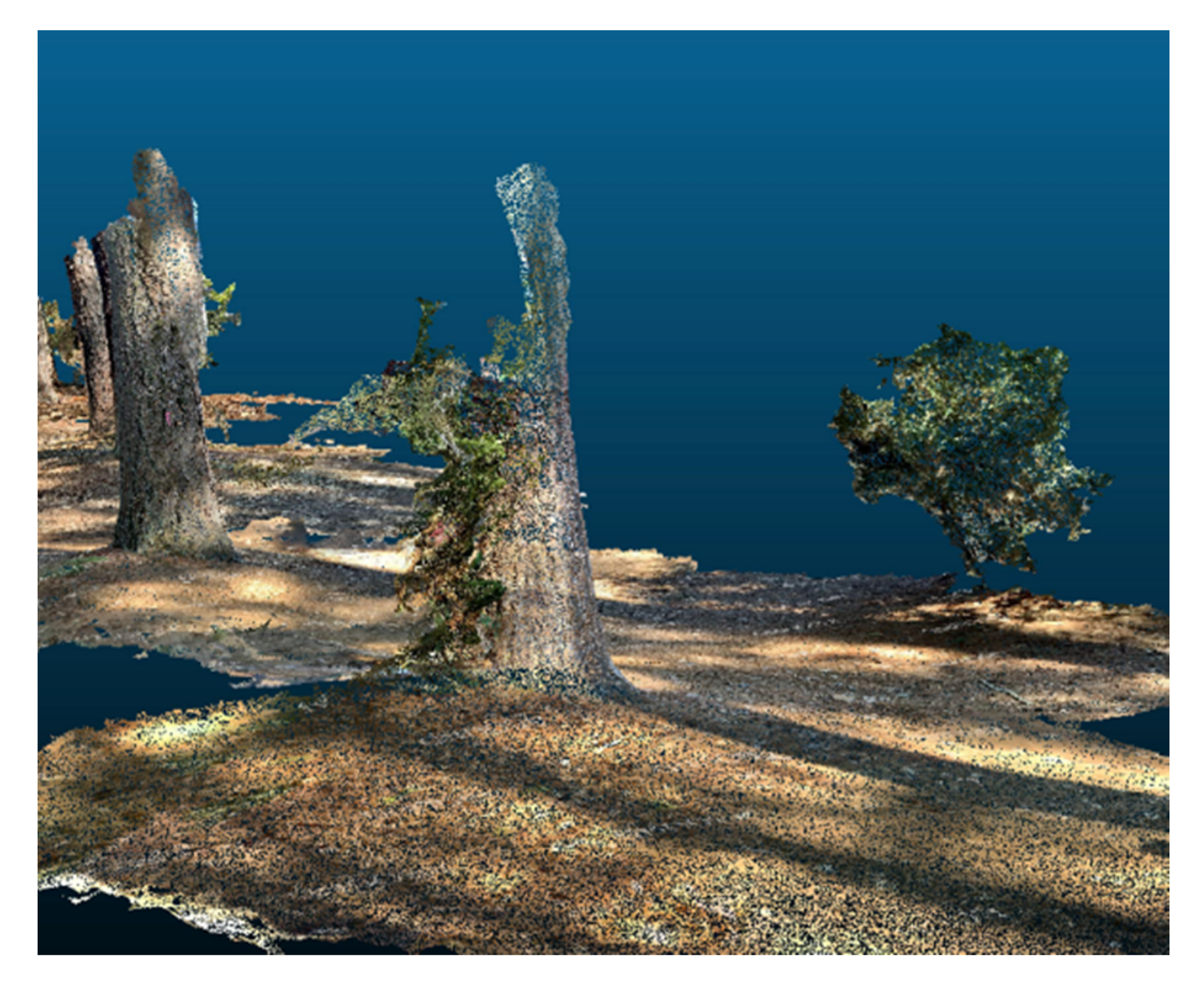
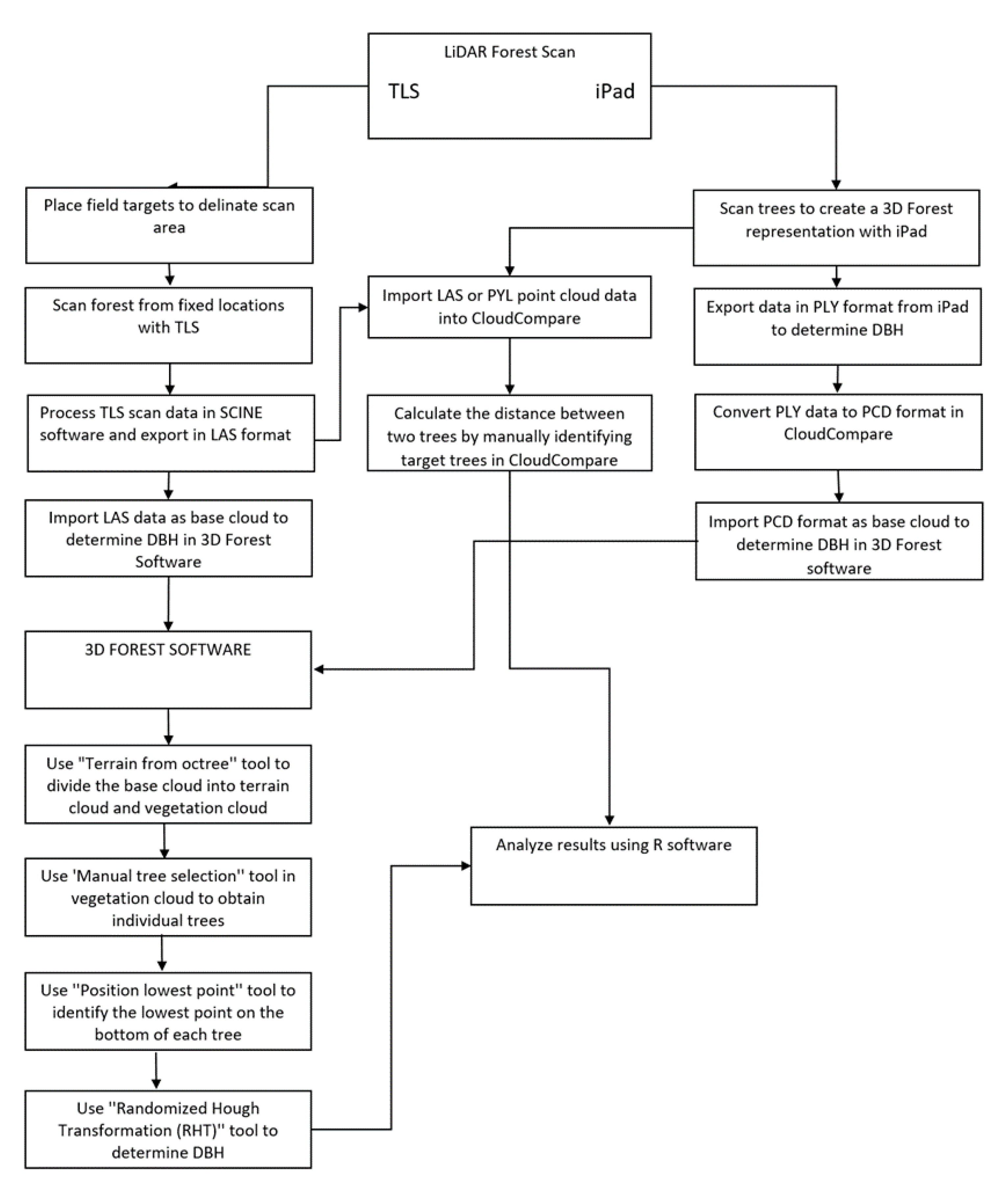
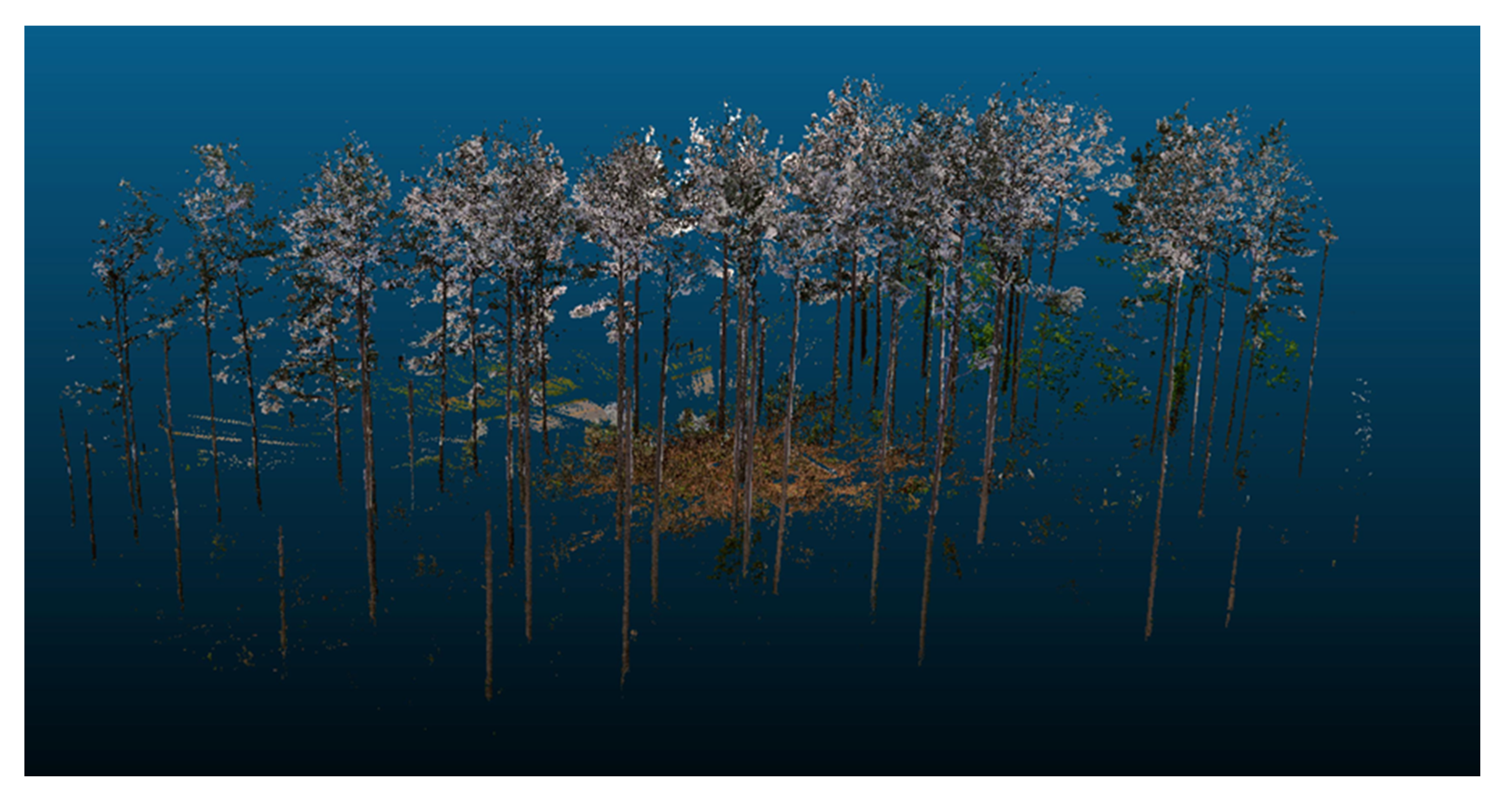
2.3. Forest Scanning
2.3.1. iPad Pro 2020 with LiDAR Sensor
2.3.2. Applications Used for Forest Scanning
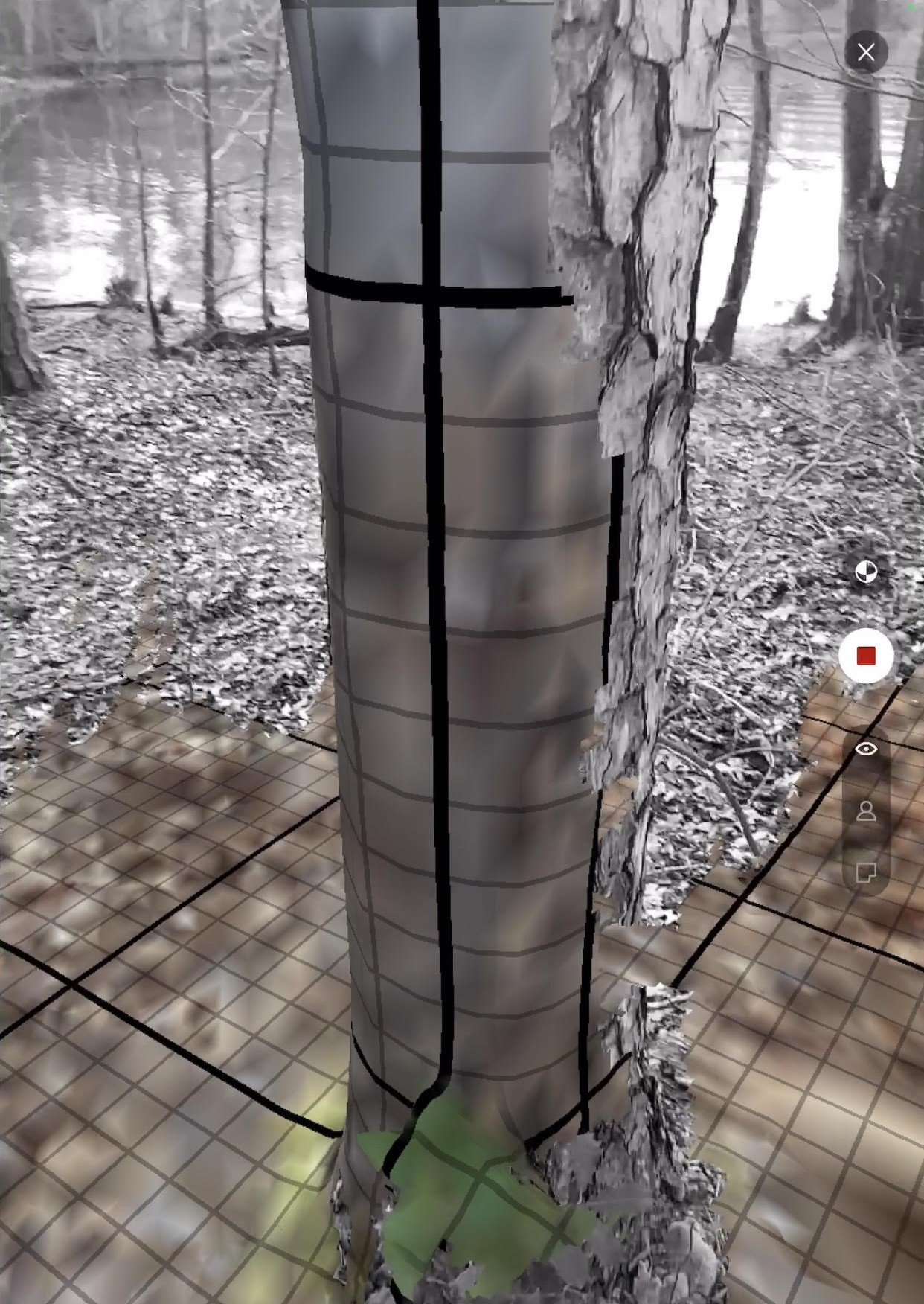
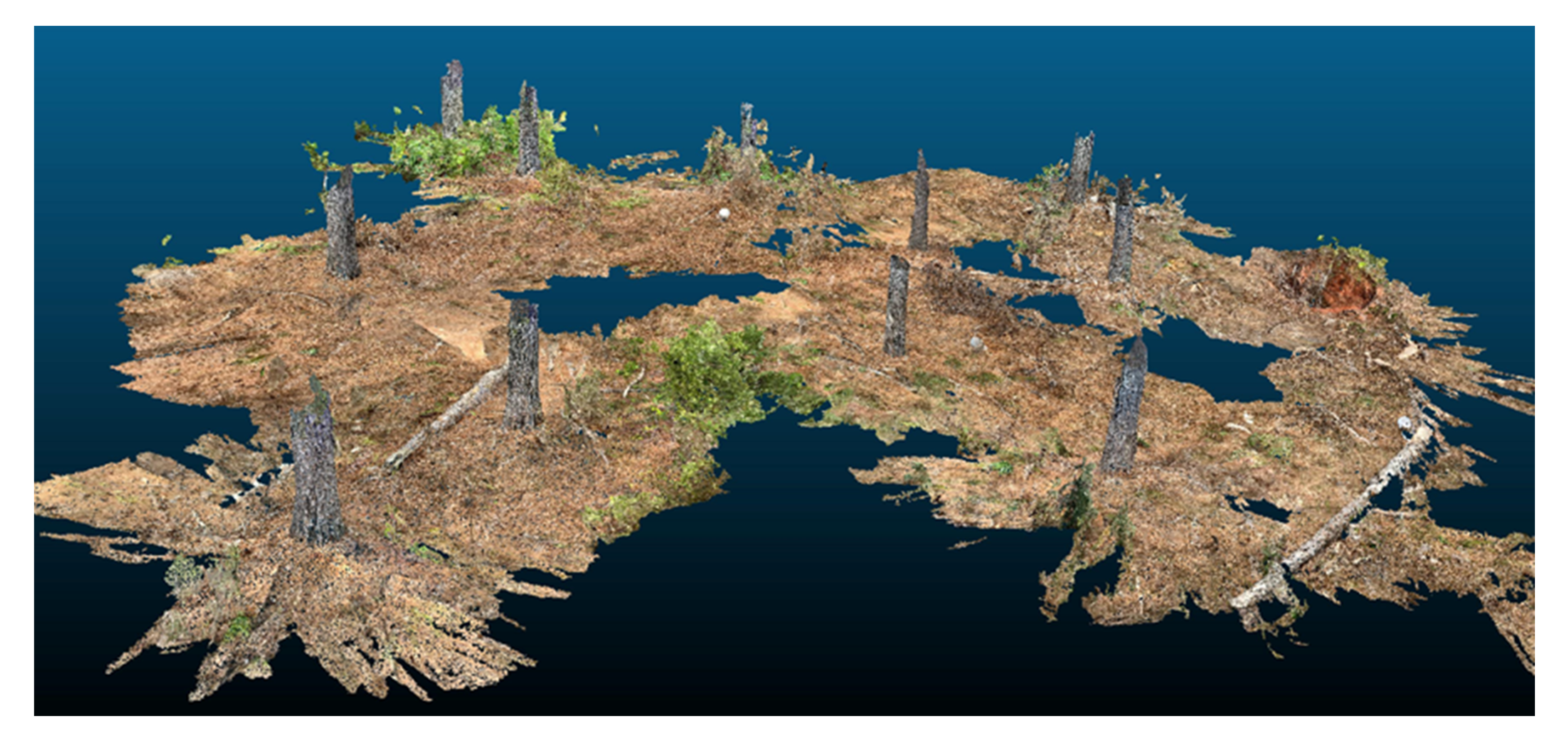
2.3.3. Forest Field Scanning with iPad Pro 2020 Forge Application
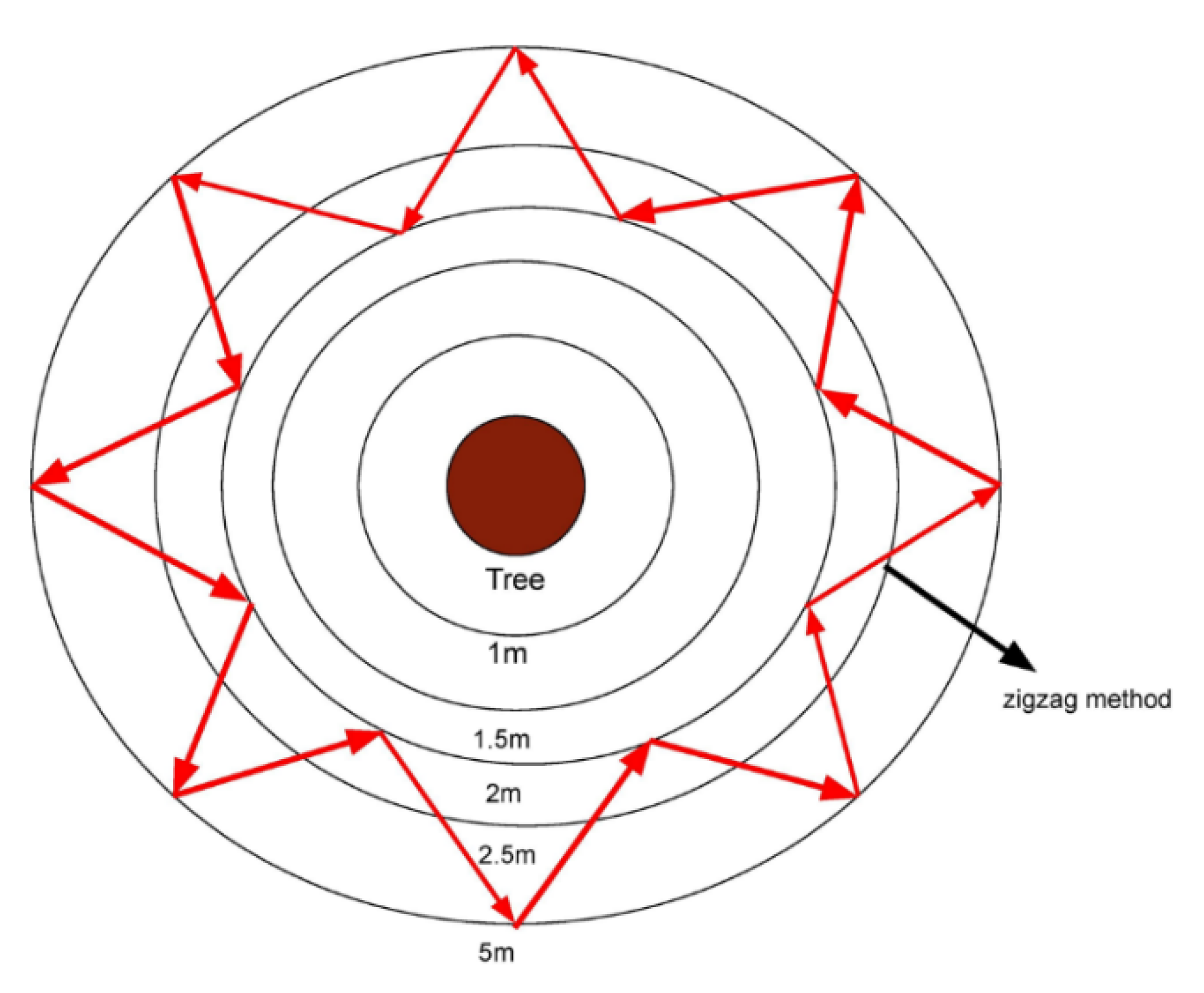
2.3.4. Scanning a Tree with Forge from Different Distances
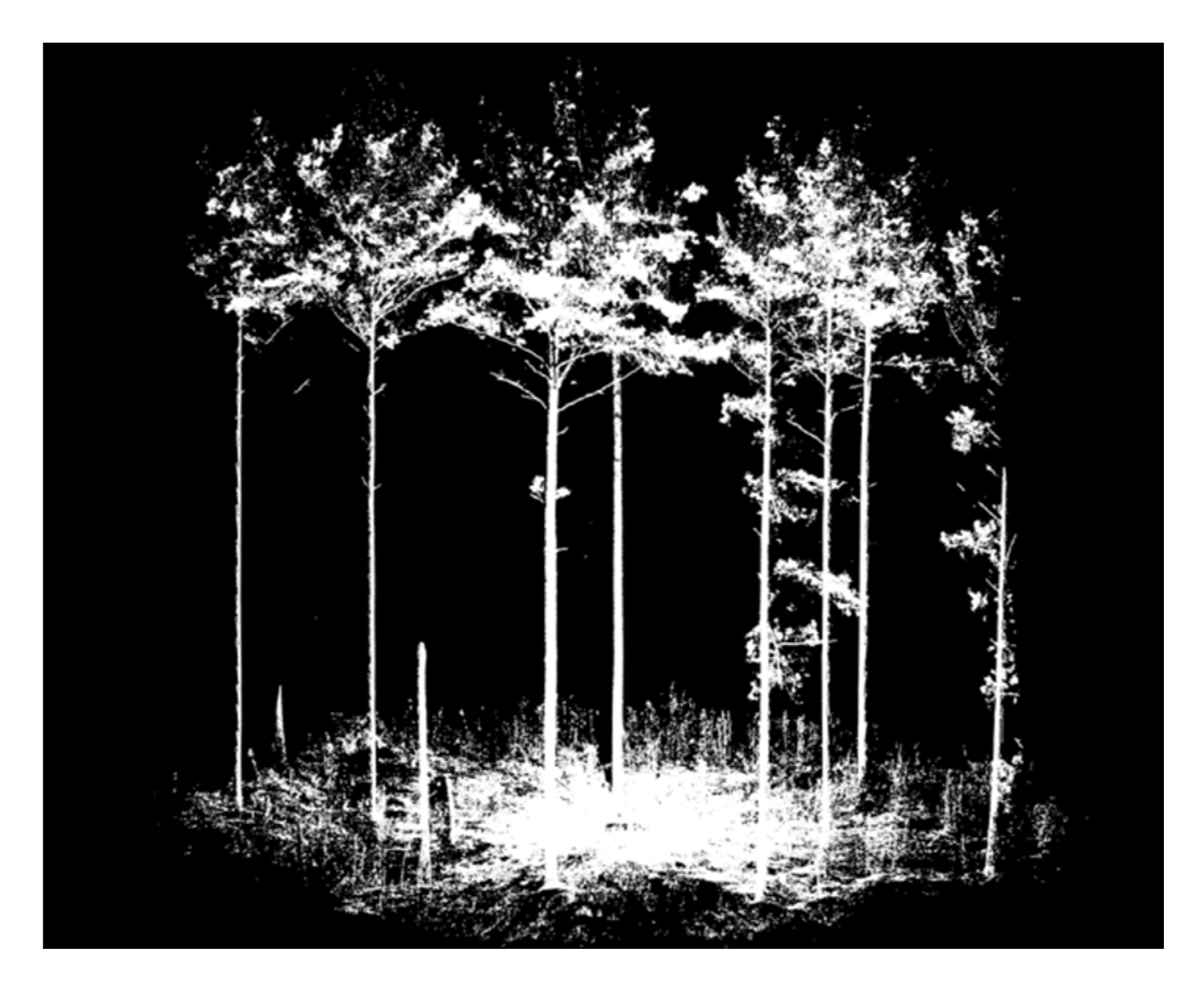
2.3.5. Terrestrial LiDAR Scanning (TLS)
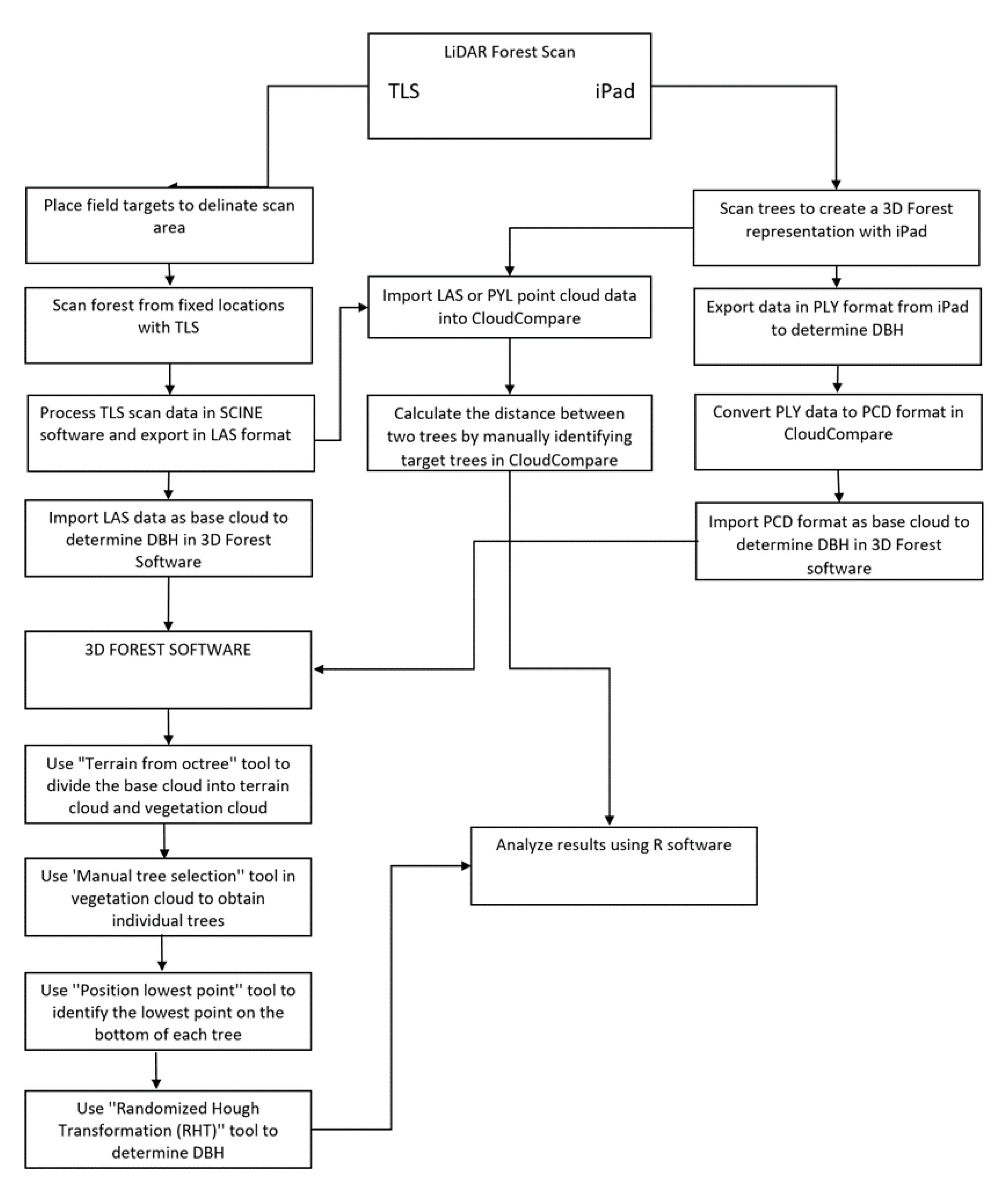
2.4. Calculating Tree DBH and Distance between Trees
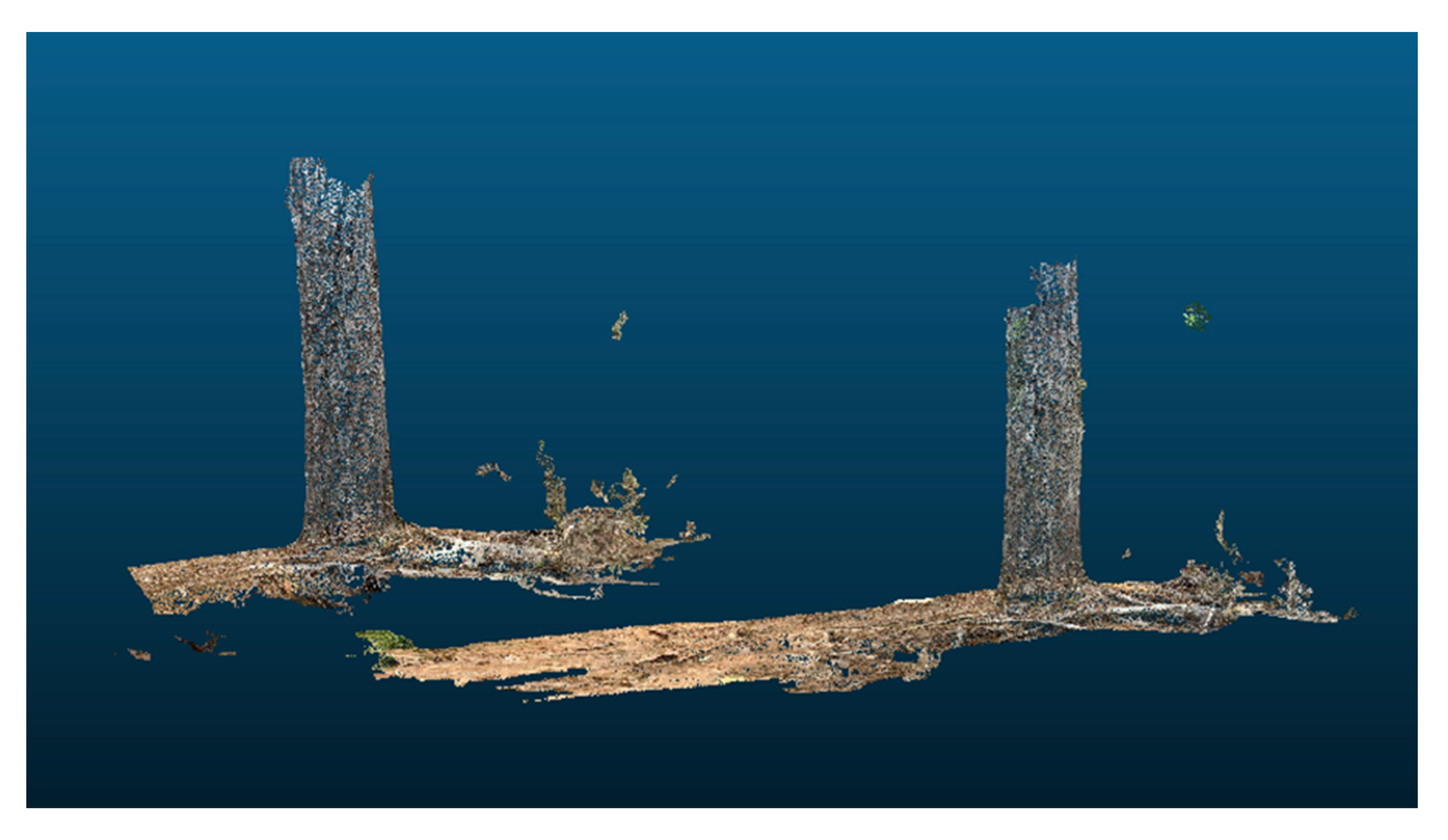
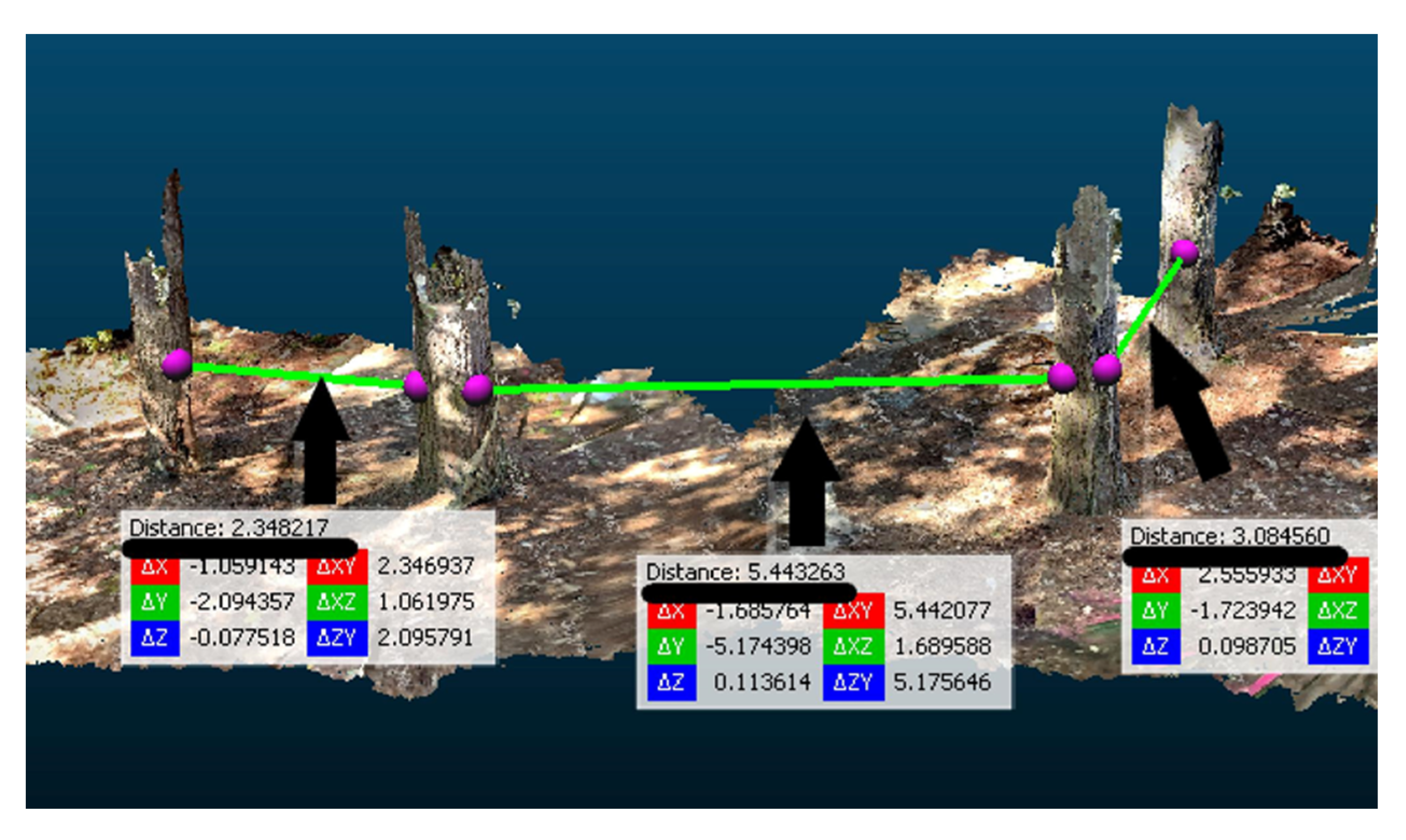
2.4.1. Measurement Distance between Trees in CloudCompare
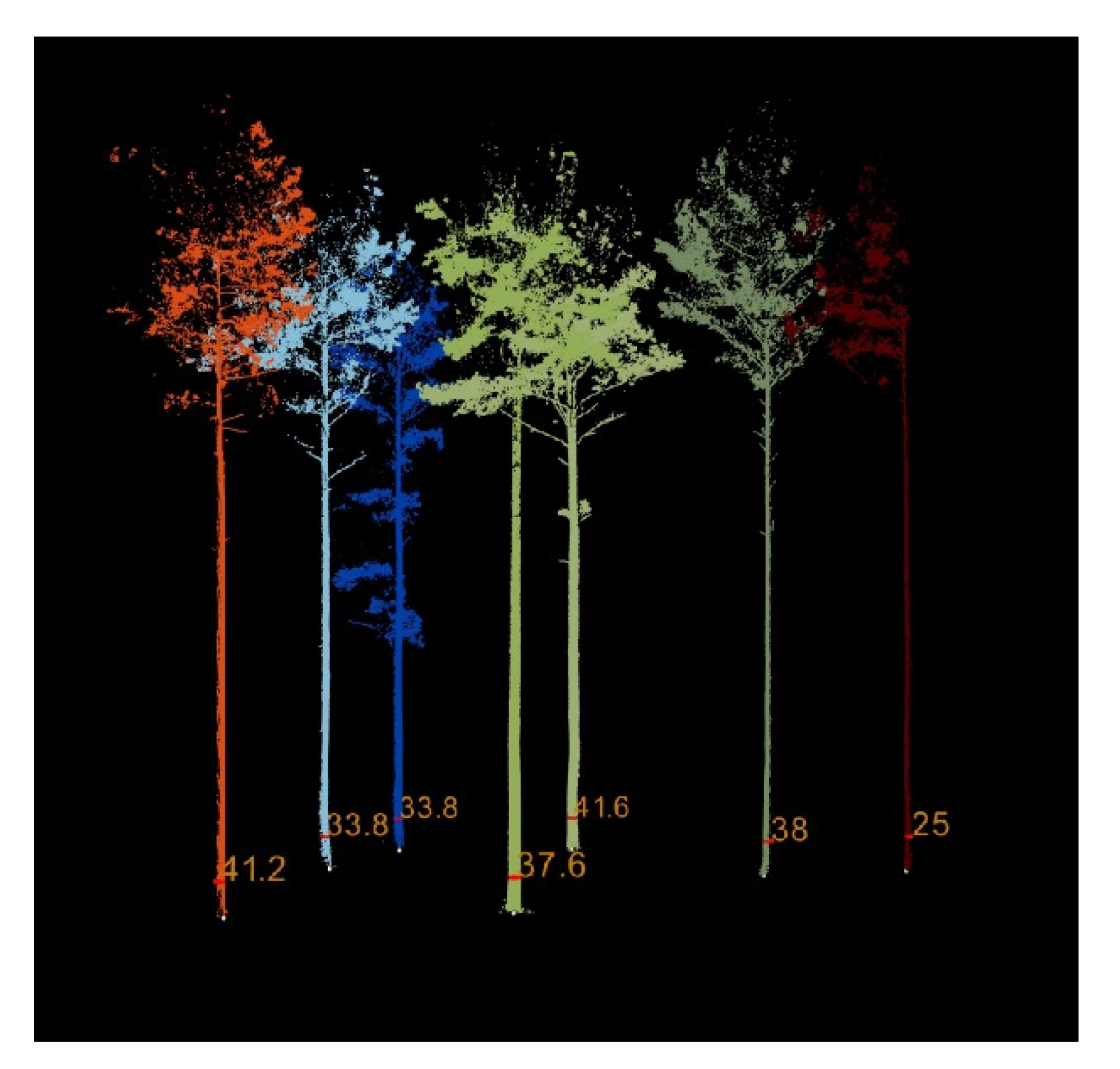
2.4.2. Determining DBH from LiDAR Point Cloud Tree Scans
3. Results
3.1. Comparison of Methods Used to Determine DBH and Distance between Trees
3.1.1. Comparison of DBH in an Urban Forest Area (Clemson Campus)
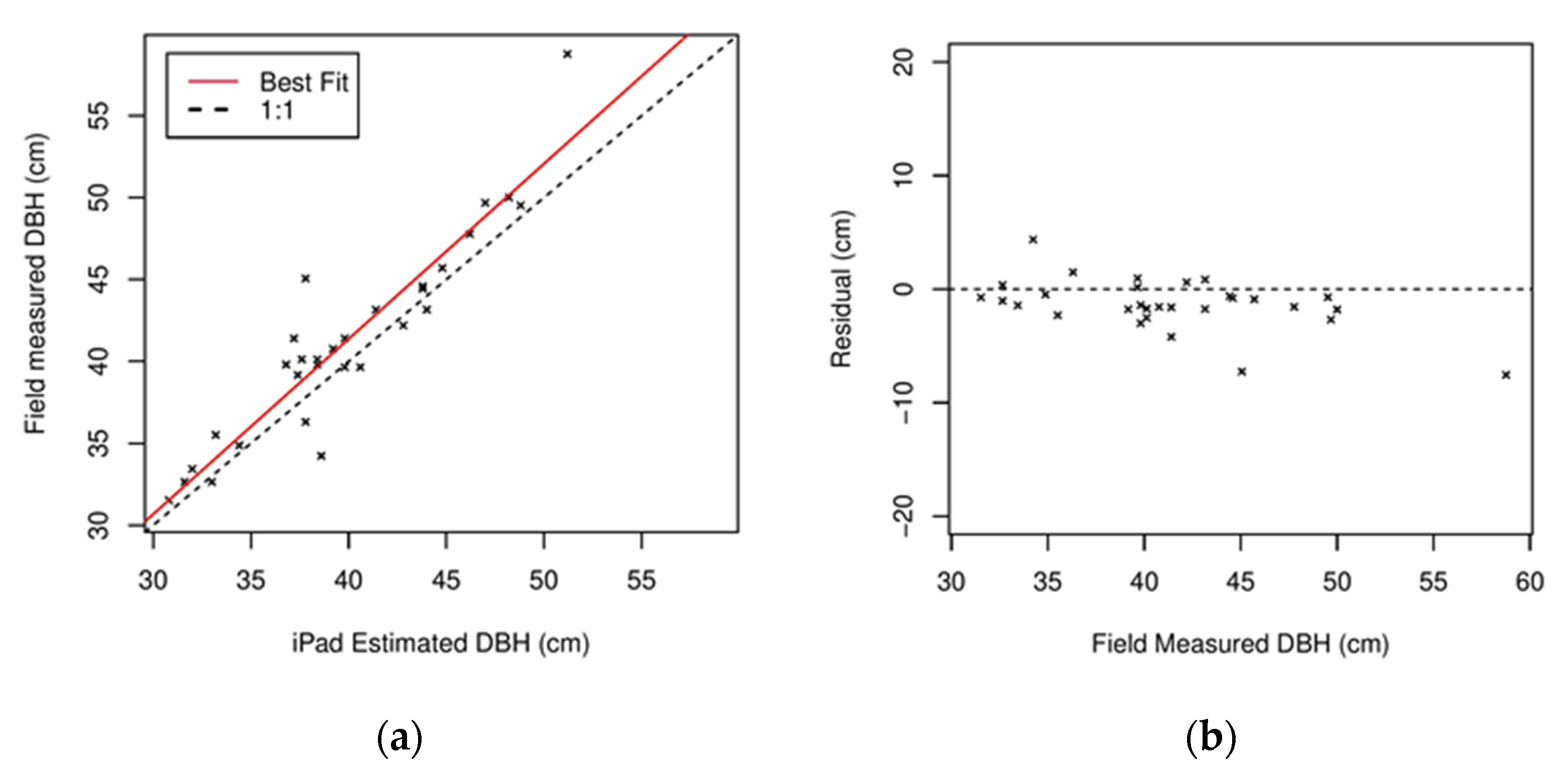
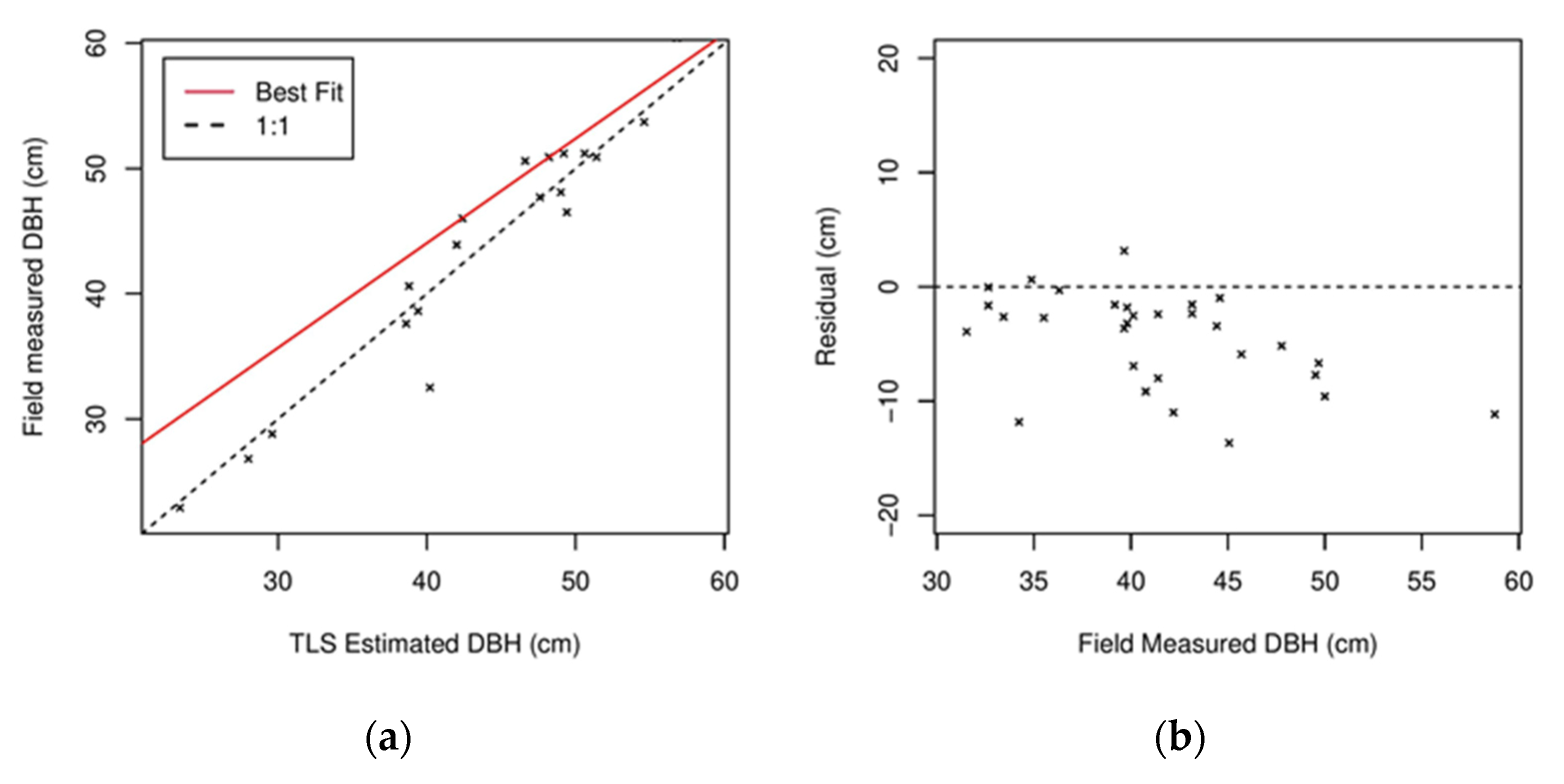
3.1.2. Comparison of DBH from iPad and TLS vs. Tape Measure DBH in a Managed Forest Stand
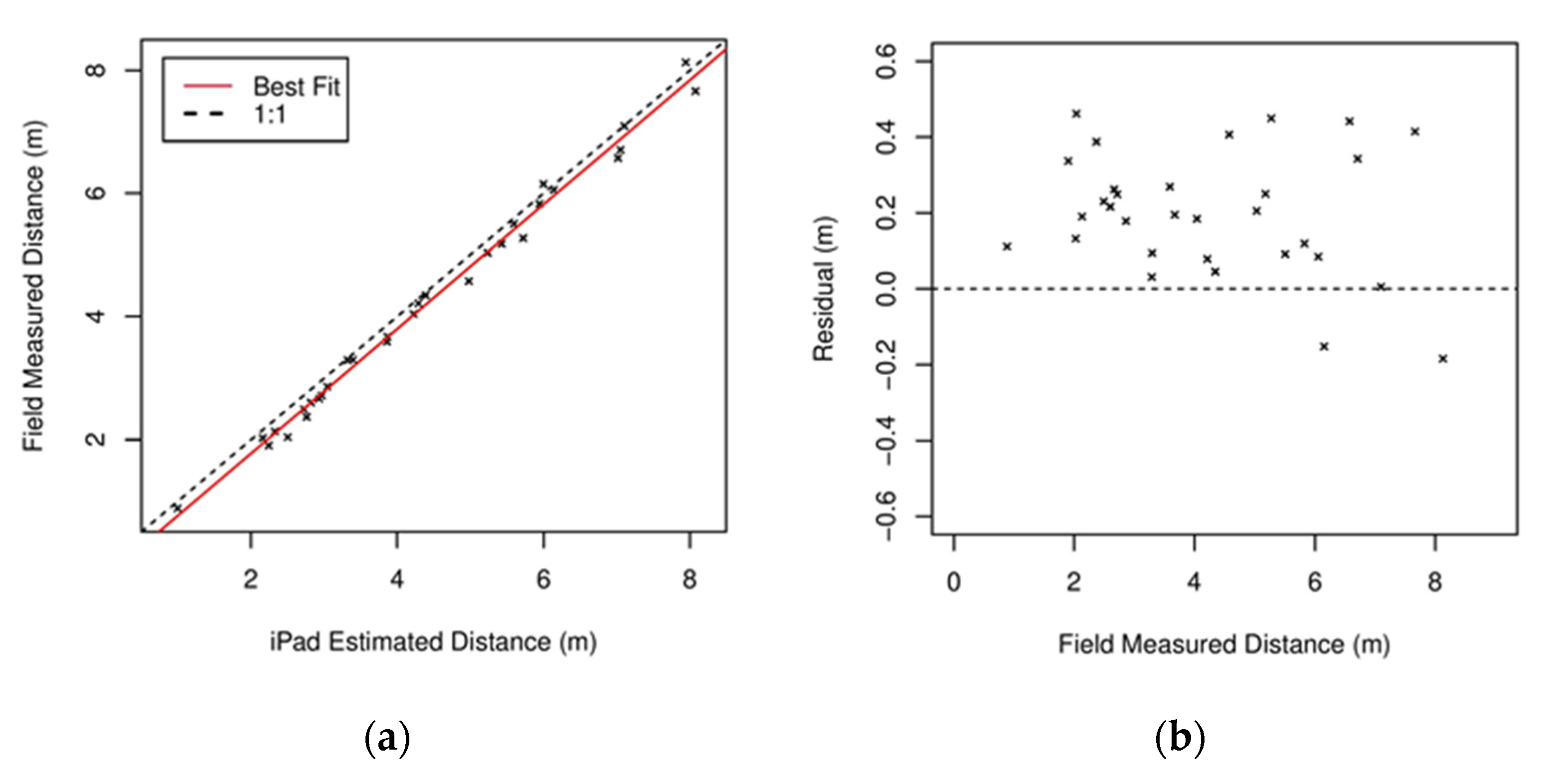
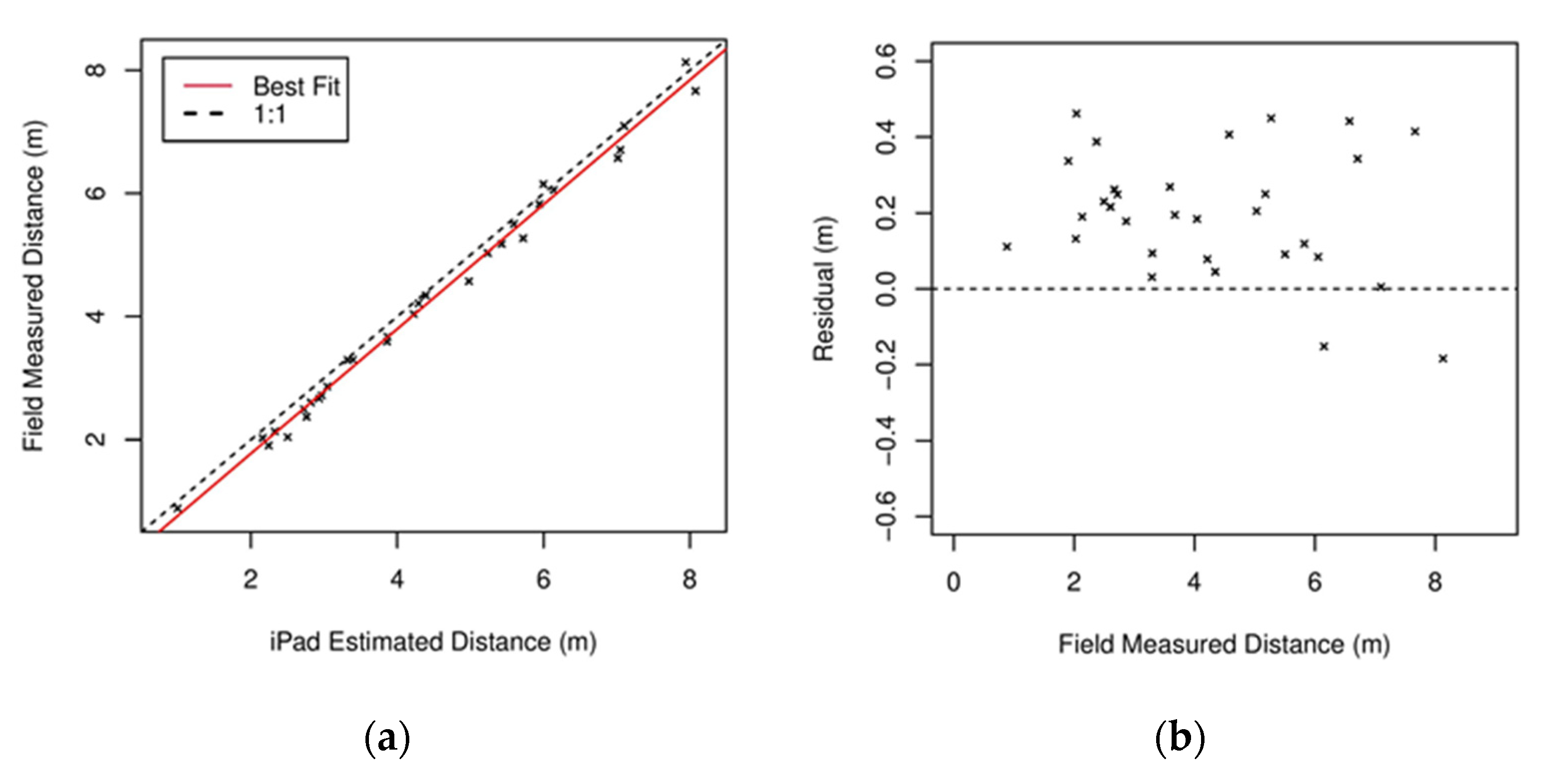
3.1.3. Comparison of Distance between Trees from iPad vs. Conventional Method (Laser Distance) in the Urban Forest Area
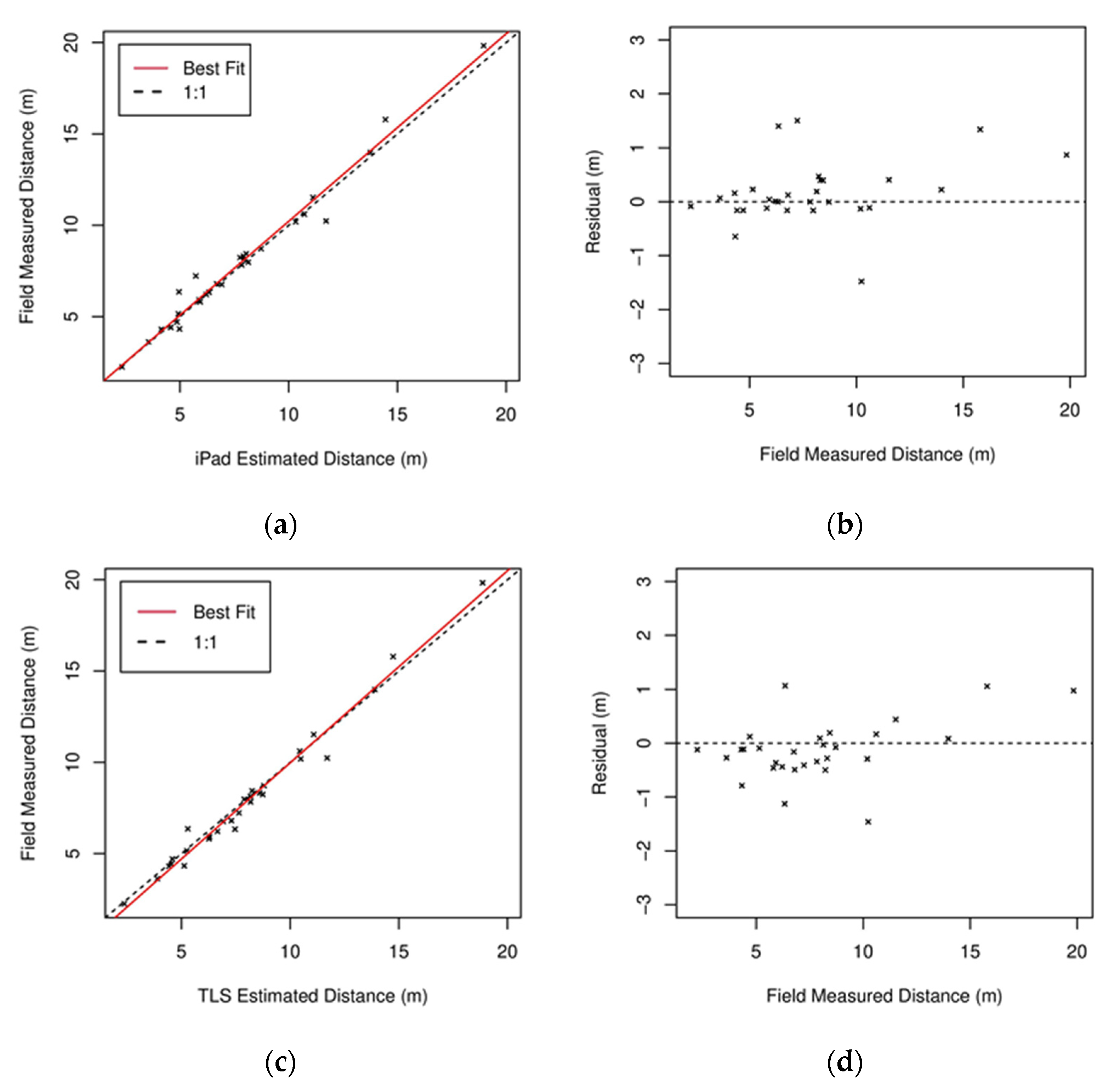
3.1.4. Comparison of Distance between Trees from iPad and TLS vs. a Laser Distance Meter in the Managed Forest Stand
3.2. Comparison of iPad LiDAR Scans from Different Distances
4. Discussion
4.1. Ability of iPad LiDAR to Determine DBH and Tree Distance in Forest Stands
4.1.1. Evaluation of the iPad LiDAR Sensor for Measuring DBH
4.1.2. Evaluation of the iPad LiDAR Sensor for Measuring Distance between Trees
4.2. Comparison of TLS and iPad
4.2.1. Comparison of the DBH between TLS and the iPad in the Forest Stand
4.2.2. Comparison of the Distance between Trees among TLS and iPad
4.3. How Successful Is the iPad in Scanning from Different Distances?
4.4. Future Application of iPad LiDAR for Crowdsourced Data Aquisition
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Gollob, C.; Ritter, T.; Nothdurft, A. Forest inventory with long-range and high-speed Personal Laser Scanning (PLS) and Simultaneous Localization and Mapping (SLAM) technology. Remote Sens. 2020, 12, 1509. [Google Scholar] [CrossRef]
- Magarik, Y.A.S.; Roman, L.A.; Henning, J.G. How should we measure the DBH of multi-stemmed urban trees? Urban For. Urban Green. 2020, 47, 126481. [Google Scholar] [CrossRef]
- Luoma, V.; Saarinen, N.; Wulder, M.A.; White, J.C.; Vastaranta, M.; Holopainen, M.; Hyyppä, J. Assessing precision in conventional field measurements of individual tree attributes. Forests 2017, 8, 38. [Google Scholar] [CrossRef] [Green Version]
- Ryding, J.; Williams, E.; Smith, M.J.; Eichhorn, M.P. Assessing handheld mobile laser scanners for forest surveys. Remote Sens. 2015, 7, 1095–1111. [Google Scholar] [CrossRef] [Green Version]
- Liang, X.; Kankare, V.; Hyyppä, J.; Wang, Y.; Kukko, A.; Haggrén, H.; Yu, X.; Kaartinen, H.; Jaakkola, A.; Guan, F.; et al. Terrestrial laser scanning in forest inventories. ISPRS J. Photogramm. Remote Sens. 2016, 115, 63–77. [Google Scholar] [CrossRef]
- Hummel, S.; Hudak, A.T.; Uebler, E.H.; Falkowski, M.J.; Megown, K.A. A comparison of accuracy and cost of LiDAR versus stand exam data for landscape management on the Malheur National Forest. J. For. 2011, 109, 267–273. [Google Scholar] [CrossRef]
- Brede, B.; Lau, A.; Bartholomeus, H.M.; Kooistra, L. Comparing RIEGL RiCOPTER UAV LiDAR derived canopy height and DBH with terrestrial LiDAR. Sensors 2017, 17, 2371. [Google Scholar] [CrossRef] [PubMed]
- Gollob, C.; Ritter, T.; Nothdurft, A. Comparison of 3D point clouds obtained by terrestrial laser scanning and personal laser scanning on forest inventory sample plots. Data 2020, 5, 103. [Google Scholar] [CrossRef]
- Watt, P.J.; Donoghue, D.N.M. Measuring forest structure with terrestrial laser scanning. Int. J. Remote Sens. 2005, 26, 1437–1446. [Google Scholar] [CrossRef]
- Maas, H.G.; Bienert, A.; Scheller, S.; Keane, E. Automatic forest inventory parameter determination from terrestrial laser scanner data. Int. J. Remote Sens. 2008, 29, 1579–1593. [Google Scholar] [CrossRef]
- Lim, K.; Treitz, P.; Wulder, M.; St-Ongé, B.; Flood, M. LiDAR remote sensing of forest structure. Prog. Phys. Geogr. 2003, 27, 88–106. [Google Scholar] [CrossRef] [Green Version]
- Del Perugia, B.; Giannetti, F.; Chirici, G.; Travaglini, D. Influence of scan density on the estimation of single-tree attributes by hand-held mobile laser scanning. Forests 2019, 10, 277. [Google Scholar] [CrossRef] [Green Version]
- Zhou, S.; He, G.; Kang, F.; Li, W.; Kan, J.; Zheng, Y. Extracting diameter at breast height with a handheld mobile LiDAR system in an outdoor environment. Sensors 2019, 19, 3212. [Google Scholar] [CrossRef] [Green Version]
- Hill, R.A.; Hinsley, S.A.; Broughton, R.K. Assessing habitats and organism-habitat relationships by airborne laser scanning. For. Appl. Airborne Laser Scanning 2014, 27, 335–356. [Google Scholar]
- Blakey, R.V.; Law, B.S.; Kingsford, R.T.; Stoklosa, J. Terrestrial laser scanning reveals below-canopy bat trait relationships with forest structure. Remote Sens. Environ. 2017, 198, 40–51. [Google Scholar] [CrossRef]
- Razenkova, E.; Radeloff, V.C.; Dubinin, M.; Bragina, E.V.; Allen, A.M.; Clayton, M.K.; Pidgeon, A.M.; Baskin, L.M.; Coops, N.C.; Hobi, M.L. Vegetation productivity summarized by the Dynamic Habitat Indices explains broad-scale patterns of moose abundance across Russia. Sci. Rep. 2020, 10, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Hull, I.T.; Shipley, L.A. Testing the ability of airborne LiDAR to measure forage resources for wild ungulates in conifer forests. J. For. 2019, 117, 492–503. [Google Scholar] [CrossRef]
- Cox, S.K.; Straka, T.J. The new deal’s land utilization program and the Clemson University experimental forest. J. For. 2018, 116, 197–203. [Google Scholar] [CrossRef]
- Wang, Y.; Lehtomäki, M.; Liang, X.; Pyörälä, J.; Kukko, A.; Jaakkola, A.; Liu, J.; Feng, Z.; Chen, R.; Hyyppä, J. Is field-measured tree height as reliable as believed—A comparison study of tree height estimates from field measurement, airborne laser scanning and terrestrial laser scanning in a boreal forest. ISPRS J. Photogramm. Remote Sens. 2019, 147, 132–145. [Google Scholar] [CrossRef]
- Apple Inc. Apple. Available online: www.apple.com/newsroom/2020/03/apple-unveils-new-ipad-pro-with-lidar-scanner-and-trackpad-support-in-ipados/ (accessed on 21 May 2021).
- Anuj Bhatia The IndianEXPRESS. Available online: https://indianexpress.com/article/technology/tech-news-technology/what-is-lidar-and-why-is-it-in-apples-new-ipad-pro-2020-6323223/ (accessed on 21 May 2021).
- Apple Inc. Apple. Available online: www.apple.com/augmented-reality/ (accessed on 20 June 2021).
- TechTarget Contributor TechTarget. Available online: Whatis.techtarget.com/definition/augmented-reality-app-AR-app (accessed on 14 June 2021).
- Dimitrov, N.; Georgiev, I. Global geodynamics from 14 years of LAGEOS satellite ranging data. Int. Multidiscip. Sci. GeoConference Surv. Geol. Min. Ecol. Manag. 2019, 19, 149–156. [Google Scholar] [CrossRef]
- Trochta, J.; Krůček, M.; Vrška, T.; Král, K. 3D forest: An application for descriptions of three-dimensional forest structures using terrestrial LiDAR. PLoS ONE 2017, 12, e0176871. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Král, K.; Krůček, M. 3D Forest. Available online: www.3dforest.eu (accessed on 20 May 2021).
- CloudCompare. 3D Point Cloud and Mesh Processing Software. Open Source Project. 2019. Available online: http://www.cloudcompare.org/ (accessed on 20 May 2021).
- Xu and Oja DBH RHT. Available online: https://github.com/VUKOZ-OEL/3DForest/wiki/09.-Trees (accessed on 14 June 2021).
- Werts, J.D.; Mikhailova, E.A.; Post, C.J.; Sharp, J.L. An integrated WebGIS framework for volunteered geographic information and social media in soil and water conservation. Environ. Manag. 2012, 49, 816–832. [Google Scholar] [CrossRef] [PubMed]
- Donager, J.J.; Sánchez Meador, A.J.; Blackburn, R.C. Adjudicating perspectives on forest structure: How do airborne, terrestrial, and mobile Lidar-derived estimates compare? Remote Sens. 2021, 13, 2297. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristics | Sampling Sites | |
|---|---|---|
| Managed Forest Stand | Urban Forest Stand | |
| Tree species | Loblolly pine | Loblolly pine |
| Number of trees sampled | 30 | 32 |
| Average tree DBH | 41.23 cm | 49.98 cm |
| Slope | 5.4% | 10.5% |
| Plot size | 1310 m2 | 1150 m2 |
| Type of use | Experimental | Recreational |
| Ground vegetation | Substantial | Low |
| Requirements | Tape Measurements | Scanning Devices | |
|---|---|---|---|
| iPad Pro LiDAR | TLS | ||
| Set-up time | NA | NA | 15 min (for each scan) |
| Required field time | 95 min | 35–40 min | 10–15 min (for each scan) |
| Processing time | NA | 2–3 min | Specialized desktop software |
| Persons needed Cost | 2 $40 (USD) | 1 $1000 (USD) | 2 >$15,000 |
| Measurements | Sampling Sites | |
|---|---|---|
| Managed Forest Stand | Urban Forest Stand | |
| Number of trees sampled | 30 | 32 |
| Average tree DBH | 41.2 cm | 49.9 cm |
| Minimum DBH | 31.5 cm | 22.9 cm |
| Maximum DBH | 59.7 cm | 84.4 cm |
| Average distance between trees | 7.9 m | 4.2 m |
| Minimum distance between trees | 2.25 m | 0.88 m |
| Maximum distance between trees | 15.7 m | 7.6 m |
| Measurement and Statistics | Scan Distance | Zigzag Scan Pattern | ||||
|---|---|---|---|---|---|---|
| 1.0 (m) | 1.5 (m) | 2.0 (m) | 2.5 (m) | 5.0 (m) | (2 to 5 m) | |
| Average DBH (cm) | 39.8 | 39.6 | 41.0 | 38.0 | 34.3 | 37.0 |
| Absolute residual error (cm) | 1.0 | 1.2 | 0.2 | 2.8 | 6.5 | 3.7 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Çakir, G.Y.; Post, C.J.; Mikhailova, E.A.; Schlautman, M.A. 3D LiDAR Scanning of Urban Forest Structure Using a Consumer Tablet. Urban Sci. 2021, 5, 88. https://doi.org/10.3390/urbansci5040088
Çakir GY, Post CJ, Mikhailova EA, Schlautman MA. 3D LiDAR Scanning of Urban Forest Structure Using a Consumer Tablet. Urban Science. 2021; 5(4):88. https://doi.org/10.3390/urbansci5040088
Chicago/Turabian StyleÇakir, Gursel Y., Christopher J. Post, Elena A. Mikhailova, and Mark A. Schlautman. 2021. "3D LiDAR Scanning of Urban Forest Structure Using a Consumer Tablet" Urban Science 5, no. 4: 88. https://doi.org/10.3390/urbansci5040088
APA StyleÇakir, G. Y., Post, C. J., Mikhailova, E. A., & Schlautman, M. A. (2021). 3D LiDAR Scanning of Urban Forest Structure Using a Consumer Tablet. Urban Science, 5(4), 88. https://doi.org/10.3390/urbansci5040088