1. Introduction
The effects of global warming and climate change are increasingly damaging human activities and well-being. One of the major contributors to these issues is transportation, particularly road transport, and cars, which are responsible for a significant portion of greenhouse gas (GHG) emissions. Road transport is responsible for 17% of global greenhouse gas emissions and is the second major contributor only after the power sector [
1]. In Europe, among all sectors, transportation is the only one where greenhouse gas emissions have increased in the last 30 years, being responsible for about a quarter of the EU’s total CO
2 emissions in 2019: the major contribution is from road transport, responsible for 71.7% of GHG emissions, and in particular, the greatest portion is from cars, that account for 60.6% of it [
2]. Regarding Italy, the transport and building sectors are which only two with increased emissions with respect to 1990 [
3].
To reduce the road mobility impact, new, greener technologies are being introduced, and electric vehicles are assessed as a promising solution thanks to the reduced Well-to-Wheel (WtW) emissions.
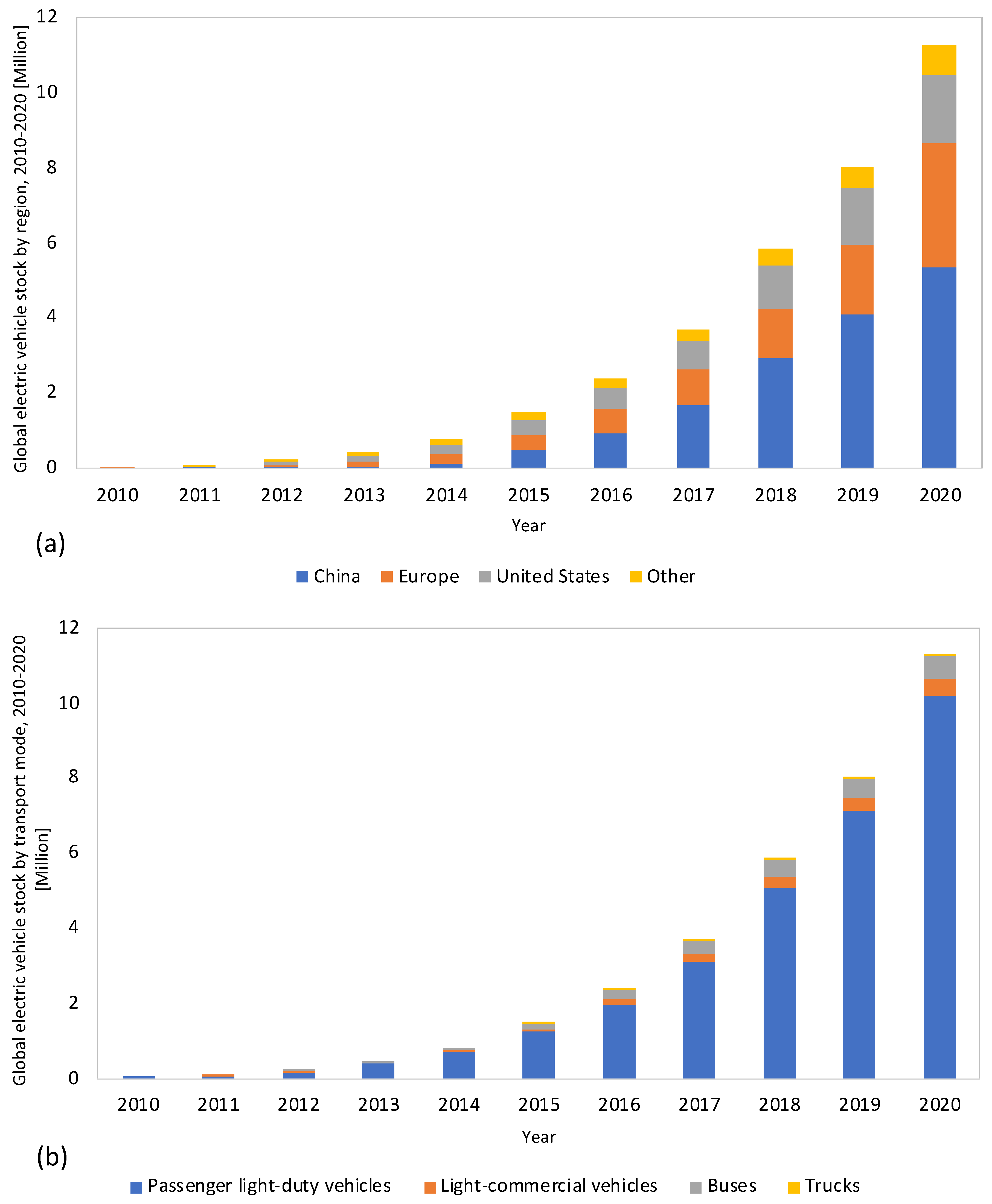
From a numerical point of view, electric vehicles, in all modes of transportation, have been growing steadily over the past decade across continents, as shown in
Figure 1.
The scope of this paper is to present a new approach aimed at sizing fast chargers along highways to facilitate the diffusion of electric vehicles (EVs). The models determine how many charging inlets (N
inlet) are required to satisfy the demand for charging at each charging station (CS). In this paper, a charging inlet means a physical socket with its power guaranteed. The sizing has been performed on the A1 highway (
Figure 2b) in Italy, one of the most crucial arterials in the country with a length of about 800 km [
4]. The timeframe is 2030, when the expected share of BEVs (battery electric vehicles) on Italian streets is about 10%. The scenario is in winter, when EVs have higher consumption, and in the peak hour of a weekday [
5].
To better understand the problem of the service level of the charging station, we must compare the power provided to vehicles from a petrol pump and an electric charging point. Using the lower heating value for gasoline (
Table 1) and assuming the pump flow rate of 50 L/min (liters per minute) [
6] shows (
Figure 2a) that 186 fast charging stations (150 W) are needed to equal the power of a gasoline pump.
Then, an energy-based approach is developed: the main idea is that through energy conversion, fuel sold on the highway is used to estimate the energy requirements for the electric fleet. Adequate correcting factors are introduced to consider the different powertrain efficiencies and characteristics. In Italy, highways are tolled and managed under concession by private companies. It is common in Italy for gas stations along highways to pay royalties to the concession provider, which also applies to the provision of electrical energy to automobiles. This leads to increased pricing when combined with other economic factors. Unavoidably, a higher price reflects demand. The charging infrastructure is being developed by concessionaires [
7,
8]. Minimum requirements for services can be written in the contracts as essential public services, as decided by policymakers. To provide incentives for the diffusion of BEVs, minimum service clauses can be included to guarantee the charging service.
The article is organized as follows:
Section 2 provides the scientific background of the research;
Section 3 shows the data used for the model;
Section 4 outlines the methodological approach adopted in this work with the presentation of the results; and finally,
Section 5 provides the conclusions and possible developments of the work.
2. Literature Review
Compared to internal combustion engine (ICE) vehicles, battery electric vehicles (BEVs) have unique characteristics to consider [
9]. The model differences in range and maximum charging power, which are influenced by usage circumstances [
9], can be substantial. Currently, only 18% of BEV models can handle 150 kW or more [
9]. Home charging is an option for electric vehicles. Due to the convenience of overnight charging and the lower cost of slow charging at home, this possibility may have an impact on user behavior [
8]. This information about EVs is not common knowledge among the average car user, as investigated in a survey in Canada [
10,
11]. This work showed that people find it difficult to recognize the basic characteristics and functions of EVs.
Studies on the location and quantification of roadway CSs frequently focus on specifics, including site detection, without taking the occupation duration into account [
12,
13]. The method suggested an approach from the user’s perspective to get around the remaining two restrictions. However, the techniques need to be used by utilizing the available data. A study uses machine learning to foresee occupancy time using disaggregated recharge data [
14]. This serves to notify users, direct them to service stations that will be free when they arrive in the short term, and focus investments over the long run based on the algorithm’s findings. It could be a supplement to this effort since it can only be performed with the current infrastructure. The same problem can be solved using the optimization technique, where the location is a degree of freedom of the problem, such as in [
15]. It undertakes an innovative approach to the problem of determining charging facility locations and capacities, demonstrating its capability of achieving optimal strategies for EV drivers by modeling queues at CSs. A promising scheduler is proposed in this work [
16], where it optimize the charging time based on the bookings made to the chargers to reduce the queue time. The issues of installing such power-intensive loads in potentially rural areas such as highways have potential downsides that need to be considered, such as infrastructure costs, energy demand management, and environmental impacts.
The value of forecasting is indeed important for infrastructure planning but also relevant to reducing the impact on the grid. For example, it has been calculated that when EVs are charged uncontrollably, only about one-third of EV electricity can be charged directly by photovoltaic feed-in [
17]. Smart charging, also referred to as electric vehicle smart charging (EVSC), is an advanced approach to charging EVs that optimizes the charging process for various beneficial outcomes. Unlike conventional charging, which simply involves plugging in an EV to charge until its full, smart charging actively manages the charging process based on a range of factors [
18]. One example of smart charging applications is the introduction of an Energy Storage System (ESS). Given the predictability of the traffic flow on the highway, it is possible to introduce economical optimization techniques that introduce locally distributed generation and ESS to reduce the impact on the grid and increase the available peak output power [
19]. Related to smart charging and V2G, is it worth noting that even if they are seen as promising technologies that will provide many benefits to users, grid operators, and other stakeholders [
20], if most of the users of the highway perceive the time spent charging as a cost, it is not advisable to try to defer the charging process.
In the context of recharging infrastructure development, the effect that the building infrastructure has on the demand for it becomes relevant. This relationship is called induced demand. This has been greatly investigated in the literature with regard to the impact that building new infrastructure has on traffic growth [
21]. The cause lies in the shift of the supply curve and the shift of the equilibrium point between supply and demand. Induced demand is also observed in the case of the installation of electric vehicle charging stations. In Norway, the country with the largest relative spread, a 200% increase over five years in the number of electric vehicles since the introduction of the first charger in the area has been measured. In the same study, however, it is pointed out that the robustness of the result is reduced only if fast chargers, the ones examined in this study, are considered [
22]. Also, consumer emotions significantly impact the adoption of electric vehicles (EVs). Positive feelings like environmental pride can increase willingness to adopt EVs, while negative emotions like embarrassment may hinder it. Understanding these emotional factors is crucial for developing strategies to encourage EV adoption [
23]. Developing a reliable charging network would help ease range anxiety. Range anxiety could be addressed by connecting and automating the infrastructure, vehicles, and users [
24].
Charging Technology and Connectors Overview
Presently, the field of electric vehicle (EV) charging technology encompasses three primary methodologies: inductive charging, battery swap, and conductive charging. Inductive charging, alternatively known as wireless charging, harnesses the principle of electromagnetic induction to replenish EV batteries. The concept of battery swap, as implied by its name, involves the physical exchange of a depleted battery for a fully charged one [
25]. Conductive charging, on the other hand, facilitates the recharging of EV batteries by establishing a physical connection between the EV and the electrical grid, typically through a cable. This method is versatile, with the capability of being implemented in various locations such as residential settings, highways, public roads, and commercial or private properties. Currently, conductive charging is the predominant method employed by EVs in the marketplace, particularly in Europe, where it has achieved mass market adoption. A crucial aspect of charging stations is the adherence to the IEC 61851–1 standard [
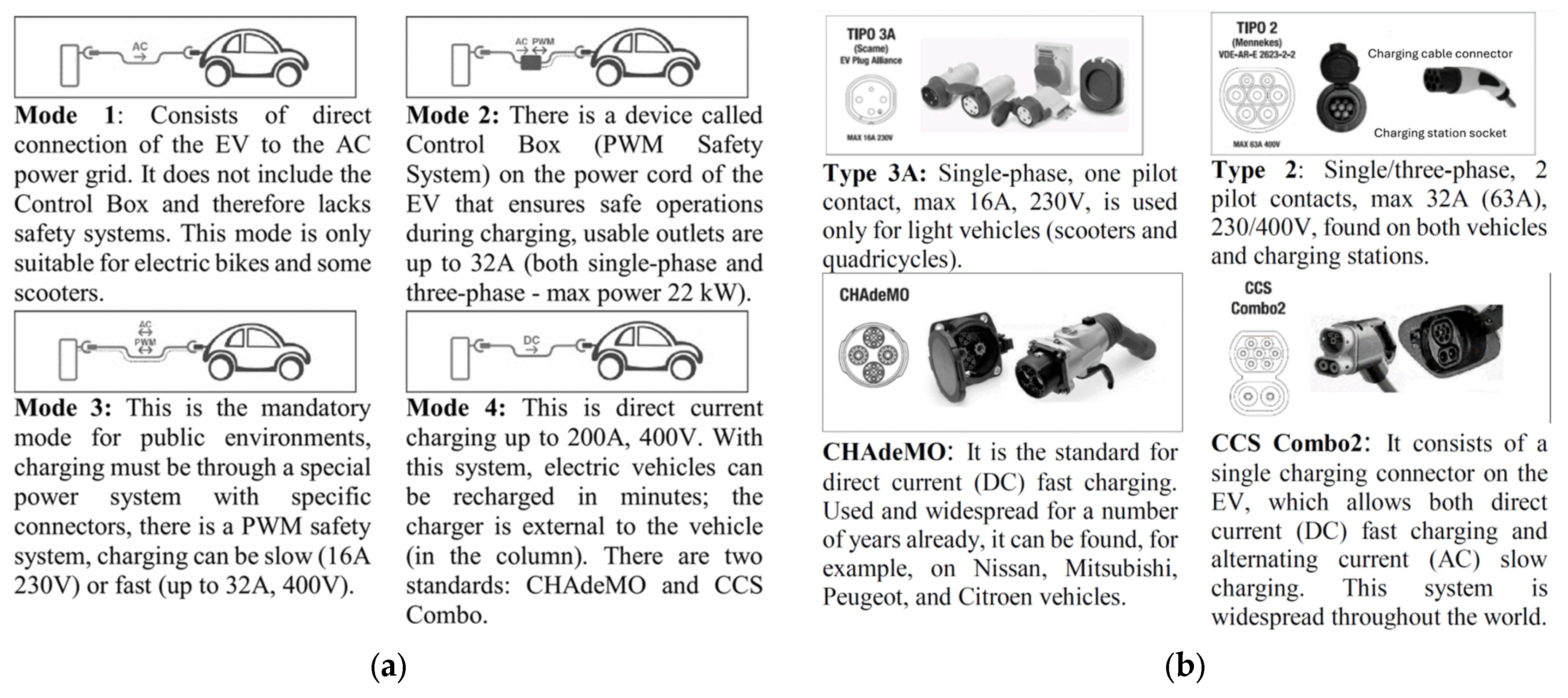
26], which mandates the inclusion of control electronics using a “universal” communication system between the charging station and the EV. This system typically employs a Pulse Width Modulation (PWM) circuit [
27], which is vital for ensuring the safety of the charging process, both for individuals and to prevent damage to the vehicle’s battery pack. The standard delineates four distinct charging modes, as illustrated in
Figure 3a.
In the realm of connector types, there are specific variations designated for AC charging of EVs (Mode 2 and Mode 3), namely Type 1, Type 2, and Type 3A connectors. For DC charging (Mode 4), CHAdeMO and CCS Combo2 are the established standards. However, recent developments in the European Union have seen a shift towards the CCS (Combined Charging System) as a replacement for the CHAdeMO connector, aligning with the region’s regulatory and market trends. This transition is reflective of the evolving landscape in EV charging infrastructure, where the CCS standard is increasingly favored for its versatility and compatibility with a broader range of vehicles. Additionally, it is pertinent to note the power limitations imposed on these connectors, which are critical for ensuring safe and efficient charging processes.
Figure 3b provides a detailed technical and graphic description of the various connector types utilized in EV charging.
3. Sources of Data for the Model
3.1. Traffic and Fuel Sold Data
Investigating the energy sold in the highway network, rather than just the energy needed or consumed, is of great importance. This is because there is a low tendency to refuel vehicles on the highway, as highlighted in the Aiscat (Italian Highway Concession Companies Association) report [
4]. Despite the fact that ICE vehicles have a consumption rate of about 6–7 Lge/100 km in the EU [
27], the average sold value is less than 0.3 L per 100 km traveled [
28]. This implies that only 5% of the gasoline that is necessary to travel is bought on the highway. For example, on average, for a trip of 500 km, only 25 km of gasoline is refueled on highways, with the remaining 475 km sourced from outside the highway. The method employed in this study is based on the actual fuel sold (gasoline, diesel, and LPG—Liquefied Petroleum Gas) [
4]. These values are considered realistic estimates of the amount of electricity that will be sold to EVs, as they represent the actual refueling behavior of drivers on highways. The data also note that Light Vehicles (LVs) have increased their presence on highways over the years, as shown in
Figure 4, while fuel sales have decreased, with the values in 2020 being biased due to COVID-19 [
28]. The calculations considered two scenarios, one assuming all vehicles are gasoline and LPG-powered, and the other considering all fuels. As almost all of the gasoline and LPG sold go to cars, diesel fuel sales may be biased by trucks, buses, and other vehicles.
3.2. EVs Market Share Assumpitions
To effectively plan for the future of electric vehicles, it is necessary to evaluate the current state of the electric fleet and make projections for the year 2030. Several sources, including the Smart Mobility Report 2020, ASPI, Autostrade per l’Italia, Motus-E, and PNIEC (National Plan Integrated For Energy And Climate), have predicted that the total number of vehicles in Italy will not change significantly by 2030. Instead, a portion of the fleet, ranging from 10% to 14%, will be composed of plug-in electric vehicles (PEVs). To provide a broader perspective,
Table 2 includes forecasts from international organizations such as Bloomberg New Energy Finance, the US Energy Information Administration, the International Energy Agency, and Enerdata [
29,
30,
31,
32,
33,
34,
35]. Since the values are long-term forecasting (global) or based on policymaker objectives (Italy and EU), the share is a desired end-state, and the induced demand would play a role in reaching those objectives. Given the data gathered, the share of BEV vehicles on highways can be assumed to be 10& for the scope of this work.
3.3. Other Assumptions
The 20 most popular BEVs in Italy in 2021 are considered for this work as they represent 90% of the Italian EV market. In particular, only AC-charging vehicles have been excluded from the study since these cars are mainly dedicated to urban use, and DC charging is the center of this study.
4. Model Structure and Design
Utilizing a linear methodology, the process of energy conversion through Equation (1) results in the generation of the demanded electricity to power the electric fleet. This is performed under the assumption that by the year 2030, 10% of the vehicles will operate as battery electric vehicles (BEVs), while the absolute number of cars remains constant. For coherence, the drivetrain market share (from official data [
36]) is about 2019 as the fuel sold.
The efficiencies (η
i) of various vehicles, found in [
25], are evaluated in terms of average consumption rates and tank-to-wheel (TtW) efficiencies across diverse powertrain types. The attributes of the fuel are derived from [
26], except for the density (
ρi) of Liquefied Petroleum Gas (LPG) as it pertains to automotive applications [
37]. All these pertinent data are comprehensively compiled and presented in
Table 1 for convenience and easy reference.
The flow of vehicles is not constant during the year. Several sources of variability depend on different seasonalities (mainly daily, weekly, and yearly) and other less stable sources like weather, crashes, etc. The most common scenario is a working day where the highest flow occurs during the peak hour. To obtain a rough estimate of the flow in a workday peak hour, Equation (2) is applied, where the
Cpeak is the relative part of traffic that concentrates in the peak hour. The studies that quantified these values have been published in the Highway Capacity Manual (identified as
k) [
38]. The
then represents the energy demanded during the traffic peak hour. The suggested value to use depends on the highway type (around 0.095).
Some corrections to the energy balance are taken into account since electric vehicles have different characteristics and performance attributes than internal combustion energy vehicles (ICEVs).
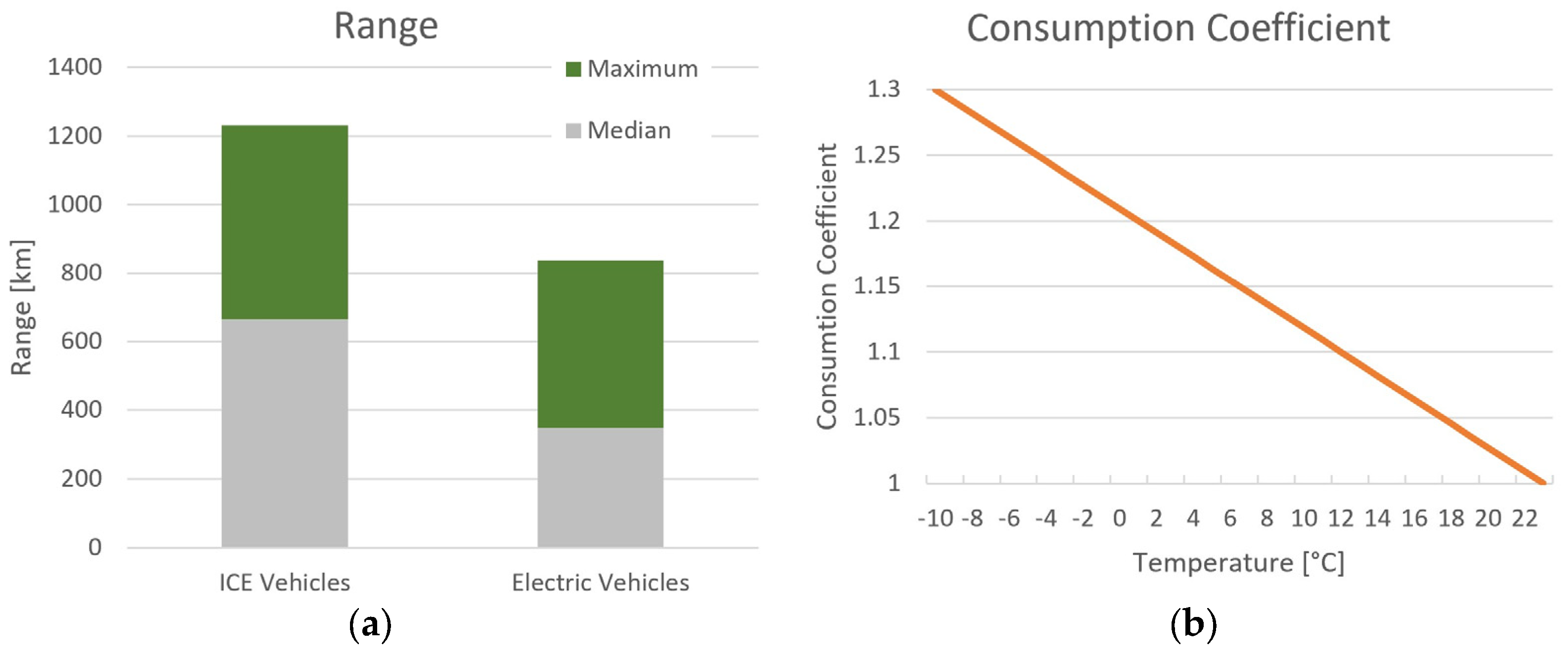
Ctemp in Equation (3) considers the increase in consumption in winter conditions since electric vehicles cannot reuse part of the heat generated by the engine; typically, the ratio between results in cold (−10 °C) and warm (23 °C) conditions is 1.3 [
39]. With the hypothesis of linearity between consumption and temperature, the values for minimum temperatures are extracted from
Figure 5b, according to the average minimum temperature in highway sections: 1.2 for Milan–Bologna, Bologna–Florence, and Florence–Rome, and 1.165 for Rome (Fiano Romano–San Cesareo) and Rome–Naples, respectively, are representative for an average minimum temperature of 1 °C and 5 °C. The linearization of the temperature coefficient calculation presents a constraint, as it does not encompass higher-temperature scenarios. However, the rationale for this choice is anchored in the objective of the study, which is to size the infrastructure for scenarios with the highest energy demand. Considering that extreme cold conditions typically result in elevated energy requirements, the focus on the −10 °C to 23 °C range is deemed appropriate. The methodology thus prioritizes conditions that stress the energy infrastructure, aligning with the study’s goal of ensuring robustness under high-demand scenarios.
Crange in Equation (3) estimates an increase in the need to recharge the EV due to its lower range. This value is the most critical one to be set, and in a conservative approach, it has been first determined as the ratio between the ICEV median range and the EV median range (values from the US Department of Energy for the models sold in 2021 presented in
Figure 5a) [
40]. This assumption can be made because the number of EV charges is approximately
, where D is the distance travelled and R is the range, and the number of refuels ICEV refueling is approximately
. Consequently, the ratio between the recharges and the refueling is approximately
. The value used in the baseline scenario is the ratio of the median values, but in the results in the next section, two other scenarios are shown, one that is more pessimistically based on the ratio of the maximum range and one that is more favorable where the range is assumed to be 1:1 between BEV and ICEV. In addressing the range ratio coefficient, a key component in the calculation, the study encounters a limitation due to the unavailability of precise origin–destination (OD) highway data. These data would allow us to determine the
Crange more accurately.
4.1. From Car Power Accepted to Average Power Demand
The following step is to estimate the average power () that will be demanded from the entire CS. To do this, the methodology used takes the 20 best-selling electric cars in the Italian market with their respective sales volume. These account for almost 89% of sales and are therefore assumed to be representative of the electric fleet being created. As of today, the Italian electric fleet is about 0.3%, so to get to 10%, it makes sense to consider the models selling now considering the fact that the average life of the car models is in line with the assumed timeframe. Starting with this, we exclude cars that are not equipped with DC charging, given the scope of this work. Three scenarios are created: all cars, cars with accepted power above 50 kW (baseline), and an optimistic scenario where the average power turns out to be 150 kW.
To properly consider charging times, the powers must be weighted by the expected occupancy time and share. It was assumed as the charging time (
), and the time it takes or the respective car to reach 60% State of Charge (SoC). Whereas for share (
), it is assumed as the current market share. The power is then calculated according to the equation.
Also, it needs to be acknowledged that the inlet has been assumed to be able to provide as much as 300 kW.
4.2. Energy Allocation to Sections
The fuel sold data are only available in aggregate form (975.2, 242.9, and 136.4 million liters, respectively, for diesel, gasoline, and LPG; this and all the relevant data for calculation are synthesized in
Table 1). It is necessary to allocate it to each examined highway section. To do so, flows categorized as Class A and Class B, namely, 2-axle vehicles, were chosen. For allocation, the disaggregated traffic must also be considered [
41,
42,
43,
44] (highway concessionaire of the analyzed highway section), while the fuel sale figure is only available in the aggregate for the entire highway network. Therefore, Equation (4) is used for allocation. Where
j is the reference highway section of the calculation, and
fAISCAT is the whole network traffic [
4]. The unit of measure needs to be adjusted.
Then, to determine the
Ninlets, the energy that needs to be provided in the peak hour is divided by the average power absorbed, as shown in Equation (5); the value obtained represents the total time needed to recharge the vehicles allocated to that section. Since the energy calculation is relative to one hour, i.e., the peak hour, and the objective is not to produce unsteady queues during the peak hour, the serviceable energy must be more than or equal to the demanded energy. So, to obtain the number of ports such that equality is verified, we divide by 1 h.
5. Results
Since there could be more than one service area in the same highway section and the punctual flow was not available, the allocation was dependent on the km covered by the SA. It has been assumed that the SAs cover half of the km preceding and half of the km succeeding. The result of the presented methodology is now presented for a series of scenarios.
A baseline scenario has been chosen based on the literature and data revised in the preceding section. It assumes an EV fleet at 10% share, that all the EVs can charge at least 50 kW, and a Crange coefficient of 1.47 (the ratio of the median ranges between ICEVs and EVs). In this scenario, after the allocation process to the SA, the Ninlets is 382. The factor that most influences the Ninlets is vehicle traffic.
Then, some results are shown in tabular form to illustrate in better detail the results for the Milan–Bologna, the path with the most traffic. The intersection between the range and the power scenario is shown in
Figure 6a to provide a better picture of the relationship between them. Then,
Figure 6b shows the results of the power scenario translation in the direct quantifications of
; in particular, the km values before and after the previous and next SA are taken into account to allocate
, and every value is then ceiled to guarantee the service. The sum of the combined total is then calculated.
5.1. Range Correction
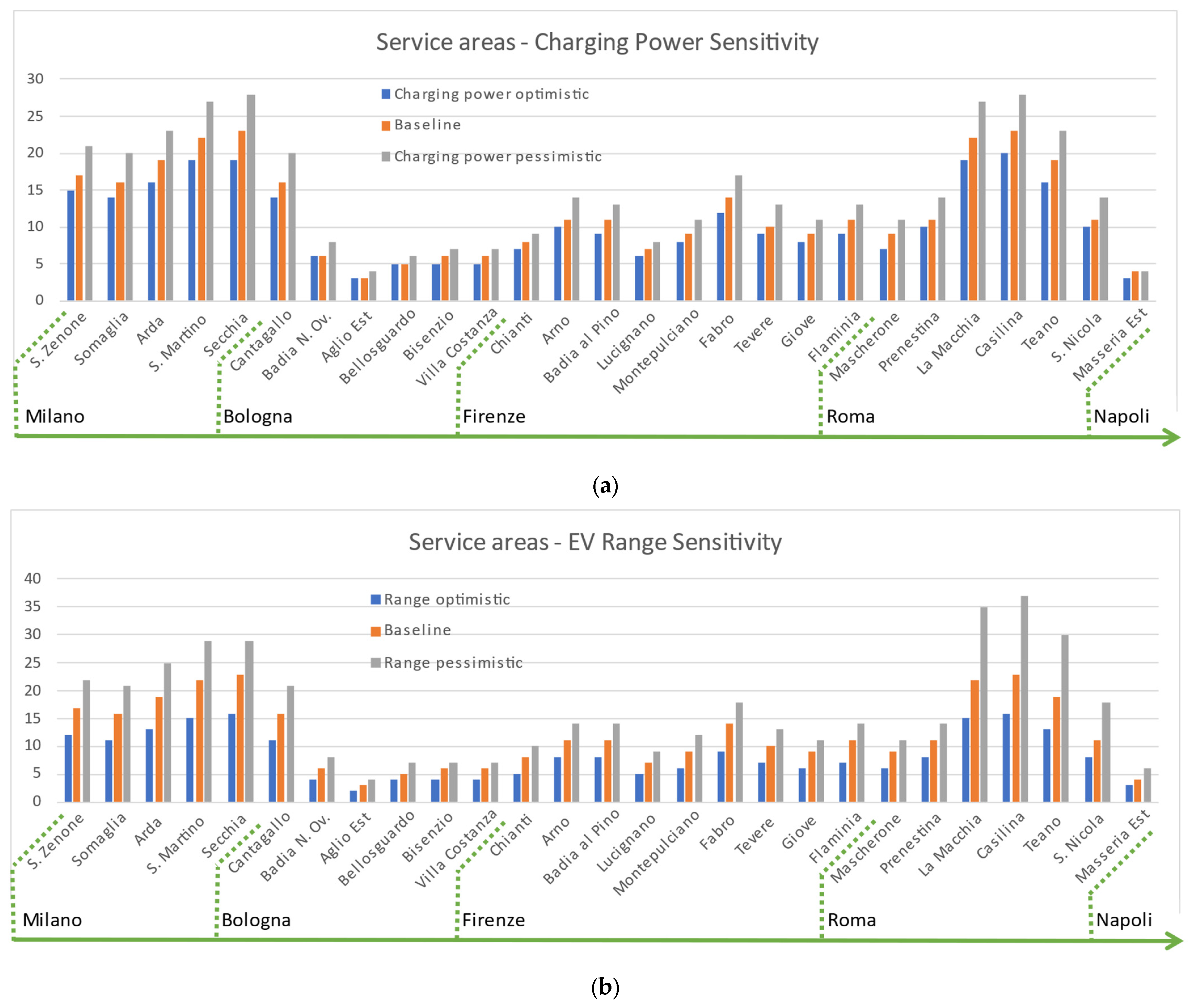
To better understand the sensitivity of the model to the most uncertain parameter, two other different scenarios are compared to the baseline one. In these, an optimistic and a pessimistic scenario are shown. The optimistic scenario predicts that the range of BEVs will be comparable to ICEVs, or at least that it will be that of cars traveling on highways. In favor of this scenario are the high growth rates of battery density. In addition, users who travel long distances would prefer models with higher ranges. Otherwise, the pessimistic scenario involves using the ratio of maximum autonomy as the range corrector, which turns out to be more unfavorable than the medians. This scenario is more conservative, and it essentially predicts no improvement in range. The results observed in these two scenarios are a 41% reduction in the
Ninlets and a 9% increase, respectively. The baseline scenario still turns out to be conservative but suitable for guaranteeing the users’ demand.
Figure 7a shows the
Ninlets for each SA on the A1 highway from Milan to Naples.
5.2. Accepted Charging Power
Similar to the previous paragraph in
Figure 7b, more scenarios are shown compared to the chosen baseline case. These differ because in the ‘Current Fleet’ case, the average power accepted by the fleet composed of the most sold cars in early 2021 in Italy, sale proportions are considered. In the other scenarios, the powers are progressively increased, assuming a likely performance increase in super-fast and ultra-fast charging in next-generation vehicles until the most optimistic case where the average power that can be absorbed is 150 kW. The baseline scenario assumes that all vehicles can charge at least 50 kW, and the third scenario assumes that all vehicles can absorb 100 W. In the given scenarios, we obtain overall
Ninlets changes of 16% and −14%, respectively, in the worst to best scenarios.
6. Discussion on the Methodology
The methodology proposed in this paper for sizing fast chargers along highways, particularly the A1 highway in Italy, offers a novel approach for addressing the growing demand for electric vehicle (EV) charging infrastructure. The core of this method involves a detailed energy-based calculation that starts with the fuel sold in the highway network and converts it into the number of charging inlets needed to meet the future electric fleet’s energy requirements. This approach is innovative in its use of real-world data, such as fuel consumption rates and vehicle flow on highways, to estimate the energy requirements for EVs.
The energy conversion process in the methodology is underpinned by several key assumptions and data points. It takes into account the current and projected market share of EVs, the variations in vehicle charging power, and the specific energy requirements of different vehicle types. This is significant because it allows for a more tailored and realistic estimation of the charging infrastructure needed. Additionally, the method considers the effects of seasonal variations and daily peak hours on energy demand, which is crucial for ensuring the reliability and efficiency of the charging stations.
One of the most striking aspects of this methodology is its integration of various corrective factors. These include adjustments for winter conditions, which affect EV energy consumption, and considerations for the range limitations of EVs compared to internal combustion engine vehicles (ICEVs). This holistic approach ensures that the model is not just theoretical but grounded in practical realities that affect EV usage. However, the methodology also faces certain limitations, such as the challenges in obtaining precise origin–destination highway data, which would have provided a more accurate estimation of range correction factors. Despite these limitations, the methodology presents a robust framework that can adapt to different scenarios, including varying assumptions about future car distribution and charging power capabilities.
The application of this method to the A1 highway provides valuable insights into the infrastructure requirements for supporting EVs in Italy. It highlights the need for a significant increase in charging inlets, considering future EV adoption rates and energy demands. The results show that the infrastructural needs vary considerably based on different scenarios, underscoring the importance of flexible and forward-thinking planning in the development of EV charging networks.
Overall, the methodology offers a comprehensive and adaptable framework for assessing and planning EV charging infrastructure on highways. It contributes significantly to the field of sustainable transport planning by providing a practical tool for transitioning towards cleaner and more efficient transportation systems.
7. Conclusions and Future Works
In conclusion, this study presented a novel approach for estimating the number of charging inlets required on highways to support the increasing number of electric vehicles. The proposed methodology, which is based on energy conversion from fuel sold on the highway to the electricity needed by the electric fleet, was found to be effective in estimating the required number of charging ports. The results of the study showed that vehicle traffic is the most influential factor in determining the Ninlets required; the difference in Ninlets between different SAs is relevant. This study also emphasized the importance of considering correcting factors, such as powertrain efficiencies and characteristics, in estimating the energy requirements for an electric fleet, varying the Crange and Pfleet variates proportionally, and varying the Ninlets both inversely and proportionally. Overall, this study provides valuable insights for policymakers and industry stakeholders in planning and implementing public charging infrastructure for electric vehicles. The method discussed can be applied to large traffic arteries, especially in cities, which often accommodate vehicles that have extended travel distances. These vehicles typically have a high demand for charging to extend their range, which is commonly achieved through High-Power DC (HPDC). Furthermore, incorporating a correction factor that is dependent on the proportion of energy recharged at the destination could enhance the applicability of this model to urban scenarios.
The absence of detailed OD highway data necessitates the adoption of alternative approaches or assumptions, potentially impacting the precision of the calculated range ratio coefficient. Consequently, this limitation must be acknowledged as it introduces a degree of uncertainty in the final results, emphasizing the need for cautious interpretation and potential future research to refine this aspect of the model.
Future work should focus on validating the proposed model to ensure its accuracy and applicability in real-world scenarios. This can be achieved through a Monte Carlo simulation, which will calculate the probability distribution of demanded power, taking into account the variability and uncertainty inherent in such predictions. Additionally, the use of origin–destination (OD) data in the simulation can provide more precise estimates of the range requirements for electric vehicles on highways. This approach will not only validate the model but also refine the estimation of the number of charging inlets needed, thereby aiding in more effective planning and implementation of electric vehicle charging infrastructure.


 ,
, 





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}