1. Introduction
The effects of climate change, such as extreme rainfall, temperature fluctuations, sea level rise, wildfires, hurricanes, increased storm surges, and floods, will accelerate the progressive deterioration of infrastructure [
1]. Global infrastructure investment needs are estimated at USD 97 trillion by 2040 [
2]. If the current trend of underinvestment in economic infrastructure continues, the world will face a gap in infrastructure investments of about USD 350 billion per year [
3]. Regarding the deterioration of transportation infrastructure, such as bridges, roads, and railways, it is estimated that low-income countries and middle-income countries will need to spend between 0.5% and 3.3% of their gross domestic product (GDP), or USD 157 billion to USD 1 trillion, annually on new transportation infrastructure by 2030—plus additional 1–2% of their GDP on network maintenance [
4]. In industrial countries, estimates show that continued underinvestment in deteriorating infrastructure will have a cascading effect on the economy and, regarding the US, will cause a loss of USD 10 trillion in GDP over the next two decades [
5]. The situation in other industrial countries is similar. In Germany, almost 700 bridges are more than 100 years old, and more than 10% of highway bridges are deficient [
6], highlighting the need for timely structural maintenance, which has been increasingly relying on structural health monitoring (SHM).
Structural health monitoring has been employed for more than half a century to mitigate infrastructure deterioration and its financial implications, gaining momentum with recent advancements in information, communication, and sensing technologies [
7]. While early SHM case studies have been limited to civil infrastructure of high importance or of strong academic interest, today’s SHM systems have matured into a significant pillar of infrastructure maintenance, representing a supplement to traditional structural maintenance strategies, such as non-destructive testing and visual inspections [
8,
9]. Through obtaining structural information extracted from structural response data collected by SHM systems, damage indicators are established that may be used for facilitating predictive maintenance and advancing life-cycle management strategies [
10]. Nevertheless, traditional cable-based SHM systems are capable of yielding relatively limited (spatially coarse) structural information, due to the high costs and the laborious installations of cable-based sensors. In recent years, wireless sensor networks have gradually been incorporated into SHM [
11], leveraging new opportunities towards reduced installation efforts, enhanced flexibility and scalability as well as lower installation costs, as compared to cable-based SHM systems.
Besides being easy to install, flexible, and scalable, smart wireless SHM systems are capable of embedded computing and distributed-cooperative execution of SHM tasks, which enables wireless SHM systems to autonomously detect structural anomalies and to provide structural information in real time [
12]. Since the merits of wireless technologies have been apparent from the very first wireless strategies in SHM, practitioners have sought to deploy wireless SHM systems of increasing density, in an attempt to obtain spatially rich information on structural conditions and resolve a major constraint of cable-based systems [
13]. However, even in wireless SHM systems, the instrumentation density is limited by aesthetic and operational constraints of monitored structures, notwithstanding the less intrusive installation of wireless sensor nodes as compared to cable-based sensors. In addition, particularly dense wireless sensor networks, in which wireless sensor nodes are installed at fixed locations and are employed at high density to reliably monitor large infrastructure, may cause high installation costs, thus nullifying the cost-effectiveness of wireless SHM systems. Furthermore, the limited power of wireless sensor networks, installed at fixed locations and for unattended long-term operation, still represents a significant constraint when deploying stationary wireless sensor nodes for SHM [
14]. To enrich the SHM-derived structural information, while addressing the aesthetic and operational constraints, the costly high-density deployment and the limited power of wireless sensor nodes, mobile wireless sensor networks have been proposed for SHM [
15].
In a mobile wireless sensor network, each mobile sensor node is a miniature mobile robot, equipped with smart sensors, that explores its environment and exchanges information through wireless communication. Thus, both constraints inherent to stationary wireless sensor nodes can be resolved when taking advantage of mobility: First, high spatial resolutions can be achieved by cost-efficiently deploying a small number of mobile wireless sensor nodes; second, each mobile wireless sensor node can be enabled to periodically return to a base station for automatic recharging, eliminating the constraint of limited power. In the last decades, prototype mobile wireless sensor nodes have been proposed based on wheeled robots [
16]. It has been demonstrated that augmenting stationary sensor networks with mobile nodes solves many design challenges that exist in stationary sensor networks. The technological foundations required to implement wheeled mobile wireless sensor nodes have been well-established, including routing protocols, architecture and topology, self-organization, energy utilization, scalability, localization, security, and privacy [
17,
18]. Mobile wireless sensor nodes have successfully been employed for wireless inspections and wireless structural health monitoring [
19]. However, although wheeled robots deployed for mobile SHM eradicate major disadvantages of stationary wireless sensor nodes regarding high (and costly) deployment density and power consumption, wheeled robots still offer room for improvement regarding maneuverability, transversability, and efficiency. These improvements are inherent to legged robots. Since the emergence of bionics in the middle of the 20th century, legged robots, mimicking the behavior of living beings, have been an objective in robotics research, gaining new impetus with the advent of the Internet of Things and Industry 4.0 [
20].
The development of legged robot locomotion has continuously been evolving over the past decades, as it offers distinct advantages compared to wheeled robots in maneuverability, transversability, and efficiency [
21]. As compared to wheeled robots, legged robots have a greater ability to move on almost all surfaces in different terrains, providing better adaptability to unstructured and unknown environments. Representing a particularly promising type of legged robots, quadruped robots are ideal in terms of stability and efficiency and are thus used in applications that require high safety or high payload [
22]. Being easy to control, design, and maintain, quadruped robots exhibit better equilibrium than robots with fewer legs, while walking control is not as complex as walking control of multi-legged robots [
23]. Engineering tasks executed by quadruped robots include mine inspection, space exploration, or firefighting [
21]. However, the utilization of quadruped robots in wireless SHM has received little attention.
This paper reports on a study proposing a mobile structural health monitoring concept based on legged, i.e., quadruped, robots, aiming to gain insights into realizing the advantages of mobile wireless sensor nodes in general and of quadruped robots in particular. The mobile SHM concept builds around an SHM methodology towards obtaining spatially rich structural information in a cost-efficient manner and at an accuracy comparable to wireless SHM with stationary wireless sensor nodes. In particular, the SHM methodology enables the piece-wise synthesis of spatially dense mode shapes, extracted by deploying the legged robots at overlapping pairs of locations on the structure. The legged robots are equipped (i) with sensors to collect acceleration data relevant to SHM of civil infrastructure, (ii) with “light detection and ranging” (Lidar) sensors for navigation, and (iii) with embedded algorithms facilitating autonomous data analysis, communication, and navigation. As will be shown in this paper, the legged robots, as compared to stationary wireless sensor nodes, require a smaller number of nodes to be deployed to achieve rich sensor information, entailing more cost-efficient SHM. As compared to wheeled robots, quadruped robots provide better maneuverability, as critical parts of civil infrastructure may be hard to reach by wheeled robots. The mobile SHM concept, with emphasis on the performance of the quadruped robots regarding the accuracy of SHM, is validated through laboratory tests and field tests, by comparing the SHM results obtained by the legged robots to the SHM results obtained by benchmark SHM systems, composed of high-precision sensors for the laboratory tests and of state-of-the-art stationary wireless sensor nodes for the field tests.
The remainder of the paper starts with a description of the SHM methodology for the mobile SHM concept, followed by the implementation of the concept into a prototype mobile SHM system based on the legged robots, placing emphasis on the modular software architecture. Then, the laboratory tests are presented, followed by the field tests conducted at a pedestrian bridge located in Hamburg, Germany. Next, the results of the laboratory and field tests are shown and compared with the benchmark SHM systems, showcasing the rich sensor information obtained by the mobile SHM system. Finally, the results are discussed, particularly focusing on the accuracy and cost-efficiency of the mobile SHM system. The paper concludes with a summary of the key findings and a discussion on future research that may be conducted to further advance this work.
2. A Mobile Structural Health Monitoring System Based on Legged Robots
In recent decades, structural analysis almost exclusively has been relying on the finite element method. Furthermore, the ability of finite element analysis to predict elaborate structural conditions in a piece-wise fashion has enabled design engineers to deviate from simple geometries and to venture into complex structural systems, which, in turn, deviate from classical structural conditions that have driven structural design for several years based on engineering intuition. However, from the perspective of structural maintenance via SHM, structural complexity inevitably raises the need for rich information on the structural condition, which cannot be retrieved with the relatively sparse SHM systems employed in current practice. The mobile SHM concept, presented in this paper, aims at enriching the information on the structural condition, while minimizing the efforts, costs, and intrusiveness, caused by dense wireless SHM systems. Specifically, the legged robots, being capable of scanning structures in detail, enable SHM practitioners to assess the condition of the structures at a structural element level and make informed decisions on the overall structural conditions. Moreover, information on a structural element level enables comparisons with elaborate finite element models, typically created as part of SHM strategies, as well as model updating.
Despite the benefits of employing legged robots for SHM, special attention should be paid to the cost efficiency of the mobile SHM concept. One of the major aspects of wireless technologies that has been appealing to practitioners is the low cost of wireless SHM systems, as compared to cable-based SHM systems, especially as far as unit prices of wireless sensor nodes are concerned. By contrast, the unit price of legged robots may be considerable. Therefore, due allowance must be made to the size of the mobile SHM system, in terms of the number of legged robots employed. In this direction, given that standard SHM data analysis methods are usually built on correlations between data sets recorded at different locations, the number of legged robots employed in this paper is reduced to the minimum, i.e., two-legged robots. For example, employing two-legged robots is in line with operational modal analysis (OMA) requirements, in which the legged robots collaboratively record and exchange SHM data to estimate mode shapes. As such, the legged robots also possess capabilities of wirelessly communicating with each other and exchanging SHM data. The following discussion centers around the SHM methodology, as well as the hardware and software implementation of the proposed mobile SHM concept.
2.1. Methodology
The methodology followed for the mobile SHM concept in this paper draws primarily from vibration-based SHM, typically conducted using acceleration response data. Although the methodology may, in theory, extend to any types of sensors attached to the legged robots, vibration-based SHM is selected, because accelerometers require neither to be fixed with strong—quasi-permanent—adhesives for measuring accurately, as is the case with strain gauges, nor to be insulated, as is the case with temperature sensors. As a result, accelerometers offer unique advantages as regards the ability of the legged robots to quickly and efficiently switch from recording acceleration response data to navigating to the next measurement location.
Following common SHM practices, information on the structural condition via vibration-based SHM is extracted through analysis of acceleration response data. Over the years, several algorithms for data analysis in vibration-based SHM have been developed, as evidenced by the large body of literature [
24]. Broadly speaking, algorithms have been devised for analyzing acceleration response data to extract information in the time domain and in the frequency domain [
25]. The information is usually represented in the modal domain, i.e., via estimates of mode shapes, referred to as “experimental mode shapes”. In this paper, the objective of the SHM methodology is to derive experimental mode shapes via frequency domain decomposition (FDD) [
26]. In what follows, the steps of the SHM methodology are illuminated.
2.1.1. Definition of Measurement Locations
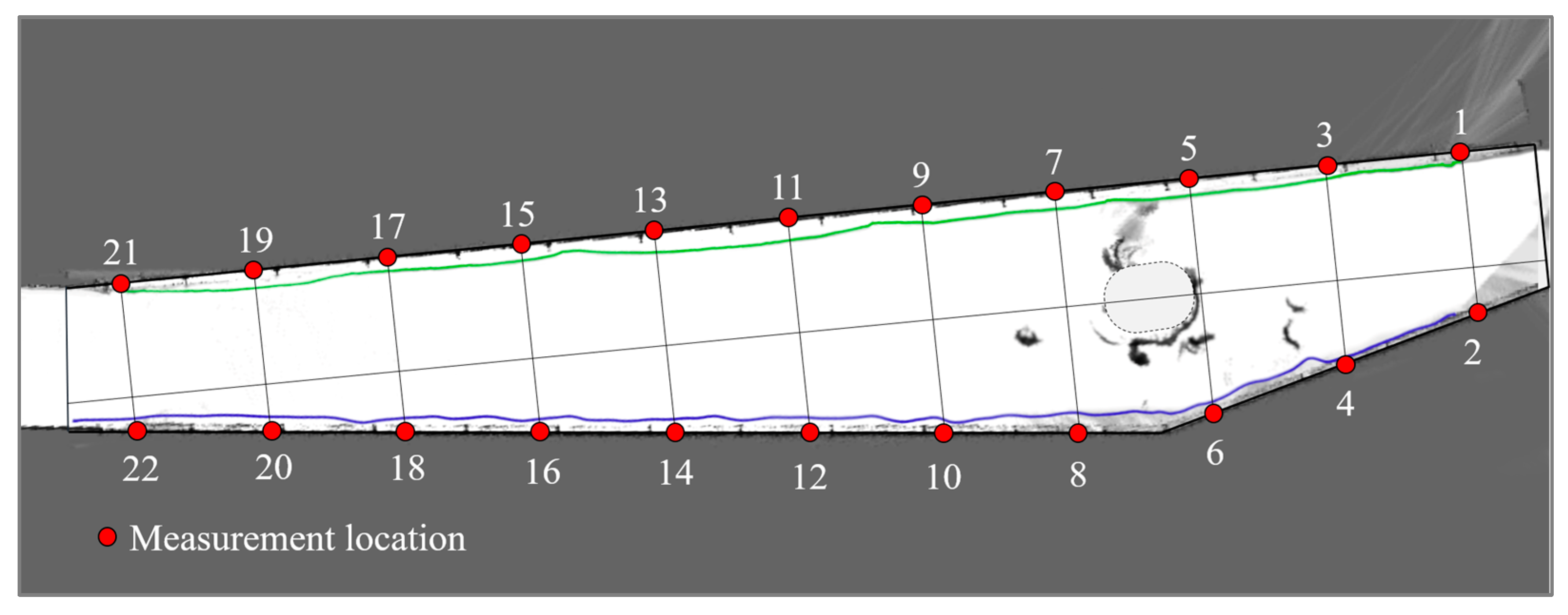
The first step of the SHM methodology involves defining the grid of measurement locations, hereinafter referred to as the “measurement grid”, on which the legged robots are tasked to record acceleration response data. Traditionally, selecting the measurement locations falls within the broad scope of “design of experiments”, which from the perspective of SHM, builds upon engineering intuition usually gained from preliminary numerical simulations. However, the mobility granted by the legged robots alleviates the SHM methodology followed in this paper from the computational burden of conducting numerical simulations for selecting the most suitable measurement locations. Specifically, representing an advantage of the legged robots, the number of measurement locations is not restricted by the finite number of stationary wireless sensor nodes, as in traditional wireless SHM systems. Therefore, defining the measurement grid follows a discretization process, similar to the discretization applied in finite element modeling, by setting a grid size, accounting for the complexity of the structure and the autonomy of the legged robots, as shown in
Figure 1. Furthermore, the capability to define relatively fine discretizations allows the detection of high-order modes—provided the excitation energy in the respective frequencies is sufficiently high—that are usually topologically hard to describe with few stationary wireless sensor nodes.
The measurement grid is scanned by the two-legged robots in successive pairs of overlapping measurement locations. In other words, assuming that the measurement grid includes m locations (L = [L1, L2,…, Lm]T), at least m − 1 measurement setups are conducted, ensuring that each measurement setup has one measurement location included in the previous measurement setup. As will be shown below, the overlap is necessary for computing the relative differences in amplitudes among the measurement locations, which are needed for synthesizing the experimental mode shapes.
2.1.2. Data Acquisition and Frequency–Domain Analysis
Upon reaching the
jth measurement setup (pair of measurement locations in the measurement grid) (0 <
j <
m − 1), the legged robots start recording acceleration response data. The measurement duration, as well as the sampling frequency (
fs), are case-specifically defined by the users
a priori and must be kept relatively modest to ensure that the power autonomy of the legged robots suffices to cover the entire size of the measurement grid. Care should be taken, however, that the sampling frequency is large enough to cover the frequency spectrum captured by the acceleration response data, limited by the Nyquist frequency (
fs/2), so as to ensure that the significant mode shapes are properly detected. Once the data acquisition is completed, each legged robot converts its acceleration response data into the frequency domain using the fast Fourier transform (FFT), which builds upon the discrete Fourier transform, shown below:
In Equation (1),
Yk is the
kth frequency component (
k = 0 …
N − 1), corresponding to a frequency equal to
fk =
k·
fs/
N,
N is the total number of measurements for the measurement setup,
yn is the
nth measurement in the acceleration response data, and
i is the imaginary number. Next, each legged robot performs “peak-picking”, i.e., detection of the highest values (“resonance peaks”) among the amplitudes
Ak of the Fourier values
Yk, computed according to Equation (2), that constitute candidates of modal frequency components.
In Equation (2),
(●) and
(●), indicate the real part and imaginary part, respectively, of a complex number. Peak-picking in traditional SHM strategies involves visualizing the Fourier amplitude spectrum, which would require sending all the Fourier values to a centralized server, thus burdening the legged robots with extensive, power-consuming wireless communication. By contrast, peak-picking in the proposed mobile SHM concept is achieved heuristically by each legged robot in an automated manner, as described below and in the flowchart in
Figure 2:
The mean amplitude Ā is computed and used to define the threshold for peak detection. Due to noise and inaccuracies inherent to the measurements and to the Fourier transform, the non-resonance-peak amplitudes are typically non-zero. Therefore, given that the number of resonance peaks is low in typical SHM strategies, the mean amplitude provides an estimate of Fourier amplitudes attributed to noise and inaccuracies;
The threshold for peak detection is defined as Ao = Ā + σ(Ak), where σ(●) represents the standard deviation. The standard deviation portion is added to ensure that isolated amplitudes that marginally exceed the mean amplitude are excluded from being interpreted as resonance peaks;
The resonance peaks with the highest amplitudes (i.e., crossing the peak detection threshold) are successively detected. To confirm that the same resonance peaks are detected, the legged robots exchange information on the peaks. Upon detecting a resonance peak, the corresponding frequency and Fourier value are stored in an array and the amplitude is removed from the Fourier amplitude spectrum before proceeding with detecting the next resonance peak. Moreover, due to spectral leakage, it is expected that resonance peaks may be hardly discernible from adjacent frequency components with similar amplitudes. As a result, upon detecting resonance peak
kp, a relatively short range 2
a of frequency components around the resonance peak (
kp-a,
kp+a) is also removed before proceeding with detecting the next resonance peak, to avoid duplicate peak detection of practically the same resonance peak. Nevertheless, when defining the value for 2
a, care should be taken that closely spaced resonance peaks may still be detected, as shown in
Figure 3. In this regard, it is generally recommended to start with a low value for 2
a and dynamically modify the value, in case the resonance peaks are well-separated;
Peak detection is terminated once all amplitudes are below the peak detection threshold.
2.1.3. Synthesis of Experimental Mode Shapes
Once the entire measurement grid has been covered, the legged robots wirelessly transmit the frequencies and Fourier values of the resonance peaks to a centralized server. Thereupon, mode shapes are extracted by applying the FDD method. The FDD method builds upon the relationship between the spectral density matrix
Gx of the loads, exerted on a structure being monitored, and the spectral density matrix
Gy of the acceleration response data, as expressed by the respective frequency response functions. The
m ×
m matrix
Gyk (with
m representing the size of the measurement grid) at the
kth frequency component is computed as follows:
where
Svw,k denotes the cross-spectral density value between location
v and location
w at the
kth frequency component of the Fourier spectrum, and the overbar indicates the complex conjugate. According to the FDD method, the singular value decomposition of
Gyk is related to the experimental mode shapes, provided that the loads can be reasonably approximated as Gaussian white noise:
In Equation (4), U and V are the matrices composed of the singular vectors, and Σ is the diagonal matrix that holds the singular values. The asterisk (*) denotes complex conjugate and transpose. Assuming that the kth frequency component is a modal component, the left-most vector of matrix U is proportional to the respective mode shape φk.
The direct derivation of experimental mode shapes using Equation (4) is only possible if measurements from all locations on the measurement grid are simultaneously recorded. Since in the proposed mobile SHM concept the measurement locations are covered in pairs, Equation (4) is applied for each measurement setup. In particular, for measurement setup
j and at the
kth (modal) frequency component, Equation (4) yields the experimental mode shape sub-vector
φk,j, which is a 2 × 1 vector that corresponds to measurement locations
v and
w. Similarly, from measurement setup
j + 1, the mode shape sub-vector
φk,j+1 is obtained, including elements for measurement locations
w and
s. The two sub-vectors are normalized with respect to the element in the sub-vectors that represents the overlapping location
w between measurement setups
j and
j + 1, as shown below
Through the successive normalization of the sub-vectors, the full
m × 1 vector of the mode shape is eventually synthesized, as exemplarily illustrated in
Figure 4. Due to the successive normalization, the accuracy of the sub-vector
φk,j+1 depends on the accuracy of the sub-vector
φk,j. In this context, special attention must be paid that the elements in sub-vectors from successive measurement setups are of the same order of magnitude. For example, resonance peaks that in specific measurement setups have low amplitudes, such as at “zero-crossing points” of mode shapes, may result in poor normalization that may affect the accuracy of the mode shape. To avoid normalization problems in the proposed mobile SHM concept, the legged robots are granted the ability to slightly modify the topology of measurement locations at zero-crossing points of mode shapes, in case amplitudes at peaks that have been identified as resonance peaks in other measurement locations are lower than the peak detection threshold.
The mobile SHM concept is implemented into a prototype mobile SHM system. The hardware and software specifications of the mobile SHM system are illuminated in the next subsection.
2.2. Hardware Design and Implementation
The legged robots employed for the prototype mobile SHM system are of type “intelligent documentation gadgets” (IDOGs). In terms of hardware, the IDOGs are based on the robot model A1 of Unitree Robotics [
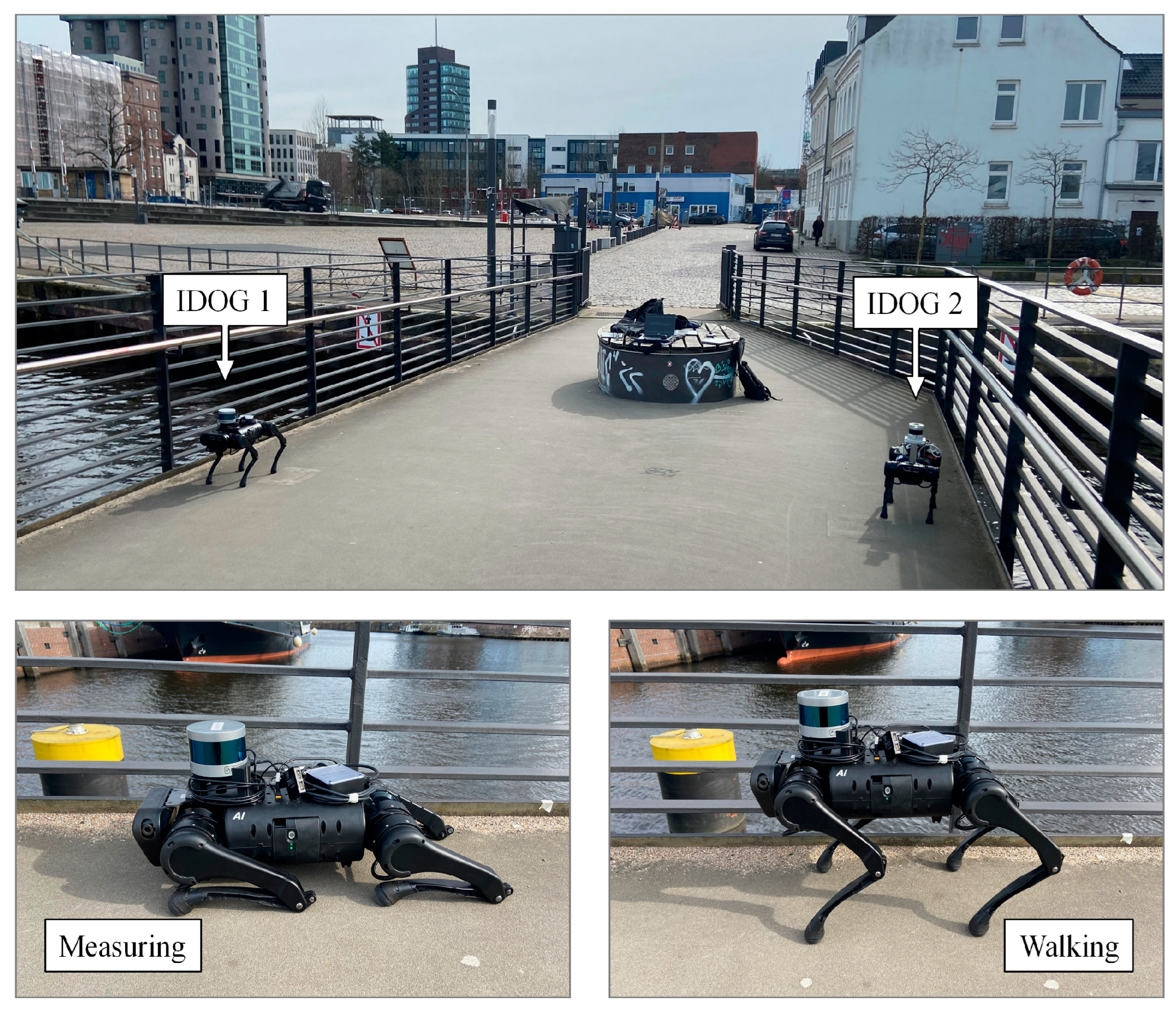
27], supplemented by further hardware components required for SHM. To fulfill the tasks of the mobile SHM concept mentioned previously, the IDOGs feature capabilities of locomotion in multiple directions, localizing themselves in relation to the structure, recording acceleration response data, and processing and analyzing data on board.
Figure 5 illustrates the hardware components. Locomotion is managed by the
locomotion component, which encompasses twelve motors, distributed evenly on the four legs of the robot for granting motion at three points of each leg, namely “hip”, “knee”, and “thigh”. The enhanced locomotion achieved with the twelve motors, essentially twelve degrees of freedom, represents an important aspect of the mobile SHM system, allowing the IDOGs to easily switch from “walking posture”, which refers to simply navigating the measurement grid, to “measuring posture”, which involves lying down to record acceleration response data.
The processing component handles the computations necessary for controlling the locomotion, via the locomotion board. Moreover, the computing board, located also in the processing component, manages the processing and analysis of acceleration response data recorded by the sensors installed in the IDOGs, which reside in the sensing component.
The
sensing component includes sensors that enable the IDOGs to perform the SHM tasks. In particular, to gain environmental awareness, a Lidar sensor is installed, which records point clouds (i.e., discrete sets of data points representing the exterior surfaces of nearby objects). By matching successive point clouds as the IDOGs move, the processing component creates a map of the environment and each IDOG localizes itself according to the map. The localization ensures that the IDOGs record acceleration response data at locations corresponding to the measurement grid. Connectivity between the Lidar sensor and the IDOG computing board is granted through Ethernet, which provides a bandwidth sufficient for the transmission of information to the surrounding environment. In addition, a LORD MicroStrain 3DM-GX5-25 inertial measurement unit (IMU, [
28]) is attached to the sensing component for recording acceleration response data and for aiding in mapping and localization through sensor fusion. The IMU features a built-in accelerometer, a gyroscope, and a magnetometer. A USB 2.0 interface provides a connection between the IMU and the processing component. While only accelerations are of interest for SHM tasks, the combination of all three sensor types provides inertial odometry information for mapping and localization. The gyroscope measures inclinations, while the magnetometer measures magnetic field strength. The accelerometer is capable of recording acceleration response data at a maximum sampling frequency of 1 kHz, within a range of ±8 g, and with a resolution of 0.02 mg [
28]. For SHM purposes, it is important that acceleration response data is recorded as closely to the surface of the structure as possible, with minimal interference from the encasements of sensing units, e.g., the mechanical components of the IDOGs. In the proposed mobile SHM system, the proximity of the accelerometers to the surface is ensured by the measuring posture, in which the IDOGs lie down on the surface, as will be demonstrated in the validation tests. The data analysis is performed onboard the IDOGs via embedded software, which is specifically designed for the mobile SHM system and involves operational modal analysis. The details of the embedded software are provided in the following subsection.
2.3. Software Design and Implementation
The embedded software for the mobile SHM system is designed on the basis of the “robot operating system” (ROS) [
29], which is integrated into the IDOG processing component. ROS is an open-source middleware that provides libraries and tools for building and managing robotic software. At its core, ROS is designed modularly around a peer-to-peer network of processes that communicate in a “publish-subscribe” pattern. In particular, the basic communication implementations in ROS are called “nodes”, “messages”, and “topics”. Nodes represent processes performing computations and are able to communicate with each other by exchanging messages via topics. Messages are strictly typed data structures. Topics are “buses” over which nodes exchange messages by publishing (i.e., sending messages) and by subscribing (i.e., receiving messages).
An extract of the software, designed for the mobile SHM system and embedded into the IDOGs, is shown in
Figure 6 to illustrate the general concept. With the exception of the
taskScheduler and
timeSynchronization components, all parts of the embedded software are based on the ROS middleware. The
taskScheduler component ensures the concurrent beginning of recording acceleration response data by the IDOGs. The
timeSynchronization component synchronizes the internal clocks of the IDOGs involved in the mobile SHM system, based on the “precision time protocol” defined by the IEEE 1588-2008 standard [
30]. The
microstrain_inertial node, which handles the operation of the IMU, publishes raw acceleration response data to the /
imu/data topic. Upon completing the measurements, the embedded SHM analysis is started. First, the
fft node, which subscribes to the /
imu/data topic, converts the acceleration response data from the time domain into the frequency domain, via the FFT, and publishes the results to the /
transform topic. The
peak_picking node, in turn, subscribes to the /
transform topic, detects the resonance peaks, and publishes the peaks to the /
peaks topic. At the same time, the
record node subscribes to and stores the raw and analyzed acceleration response data. When the required number of measurements has been recorded, the IDOGs stop recording.
For deriving the experimental mode shapes, the acceleration response data are linked with location information. The IDOGs localize themselves using Lidar-generated point clouds derived from the IMUs, based on which the IDOGs reach the target locations, defined on the measurement grid. Localization is performed in two phases. First, following up on previous work reported in [
31], a “simultaneous localization and mapping” (SLAM) algorithm is employed for creating a 2D grid map of the structure. Second, after storing and linking the 2D grid map to the coordinate system in which the measurement grid is defined, the IDOGs perform “pure” localization on the map, i.e., without modifying the map. As a result of the localization, current IDOG locations are matched with the measurement grid, thus verifying that current locations match the measurement locations. In this paper, the Google Cartographer is used for both map creation and pure localization [
32]. The
cartographer node subscribes to the /
scan topic, which provides 2D representations derived from the point clouds published by the
lidar node. In addition to the point cloud data, the
cartographer node takes the 2D grid map, created by the SLAM algorithm, as input and computes the position of the IDOG published in the /
map topic. Furthermore, the localization serves as a basis for autonomous navigation of the IDOGs to the measurement locations. It should be noted that, in this study, to enable efficient validation of the mobile SHM system, navigation is achieved by prescribing the measurement locations a priori.
The succession of tasks towards fulfilling the SHM objectives is shown in a flowchart in
Figure 7. The mobile SHM begins with time synchronization of the internal clocks of both IDOGs using the precision time protocol. Next, the sensing components are started, and both IDOGs enter a loop checking whether a measurement setup has been completed. If acceleration response data has not been recorded from the entire measurement grid, the IDOGs assume the walking posture and move to the next measurement locations, as prescribed by the respective measurement setup. The IDOGs assume the measuring posture when the measurement locations are reached. Acceleration response data acquisition begins as soon as both IDOGs have reached the designated measurement locations and have assumed the measuring postures. Then, acceleration response data is recorded for a predefined duration, and the IDOGs analyze the respective acceleration response data by computing the FFT and performing peak picking. Upon covering the entire measurement grid, the Fourier values at the peaks are sent to a centralized server, where the experimental mode shapes are synthesized, as described previously.
4. Summary and Conclusions
Structural health monitoring (SHM) has become a crucial component of infrastructure maintenance, leveraging advancements in information, communication, and sensing technologies. Cable-based SHM systems are gradually being replaced by wireless sensor networks, taking advantage of reduced installation efforts, increased flexibility, and scalability. However, wireless sensor nodes need to be deployed at high density to reliably monitor civil infrastructure, causing high costs. Moreover, stationary wireless sensor nodes have limited power autonomy, representing a significant constraint for unattended long-term operation.
To resolve the critical constraints stemming from costly high-density deployment and limited power autonomy, a mobile structural health monitoring concept based on legged robots has been proposed. The legged robots are equipped with sensors to collect acceleration data pertinent to SHM of civil infrastructure, with cameras and Lidar sensors for navigation, and with embedded algorithms that allow for data communication, processing, analysis, and synchronization. Laboratory tests and field tests, conducted on a pedestrian bridge, have been devised to validate the accuracy and cost-efficiency of the legged robots deployed in dense measurement setups for wireless SHM of civil infrastructure, aiming to gain insights into the advantages of mobile wireless sensor nodes in general and of legged robots in particular, in terms of obtaining rich information on the structural condition. Measurements recorded by the legged robots of the mobile SHM system have been compared with measurements obtained by high-precision benchmark SHM systems. The laboratory tests have showcased the capability of the mobile SHM system to collect measurements of high accuracy under controlled excitation conditions. Moreover, the field tests have demonstrated the capacity of the mobile SHM system to yield rich modal information in real-world conditions.
As has been shown in this paper, the legged robots, as compared to conventional stationary wireless sensor nodes deployed for SHM, require a smaller number of nodes to be installed in civil infrastructure to achieve rich sensor information, entailing more cost-efficient, yet accurate, SHM. In conclusion, this study represents a first step towards autonomous robotic fleets advancing structural health monitoring. Future research will focus on further advancing the perception of the robots with respect to incorporating semantic and 3-dimensional information of structures, aiming to improve autonomous navigation when performing SHM tasks.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}