

Installation and Use of a Pavement Monitoring System Based on Fibre Bragg Grating Optical Sensors

 ,
,  , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Characteristics of Optical Sensors
2.1. Fibre Bragg Grating Sensors
2.2. Fibre Bragg Grating Coating and Protection
3. Methods for Developing the Pavement Monitoring System
3.1. Data Acquisition System (Interrogator)
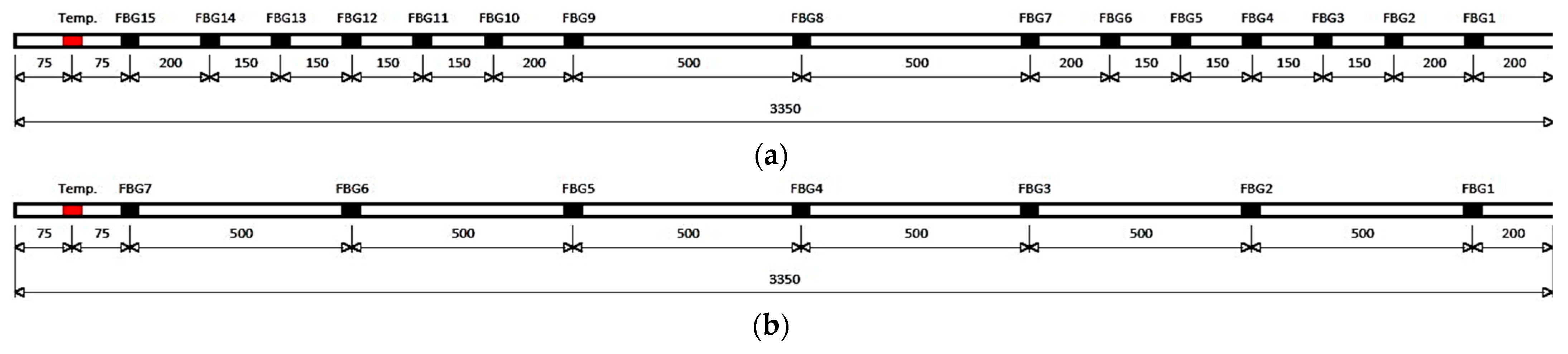
3.2. Pavement Monitoring System Architecture
- The type of information to be collected (which determines the type of sensors to be used);
- The location of the sensors;
- The use of protection, coatings, or resins;
- The application procedures;
- The interrogator connection to the communication network infrastructure.
- Each traffic lane is about 3.35 m wide;
- The width of a heavy vehicle is approximately 2.55 m;
- The average width of one heavy vehicle tyre is about 30 cm.
3.3. Site Selection for Pavement Monitoring System Installation
- Easy access and connection to an electrical power supply;
- Access to an underground infrastructure to route the fibre-optic cables;
- Presence of a roadside technical cabinet nearby to install the interrogator;
- Access to a communication network in the technical cabinet to transfer the data collected in the interrogator to an external database.
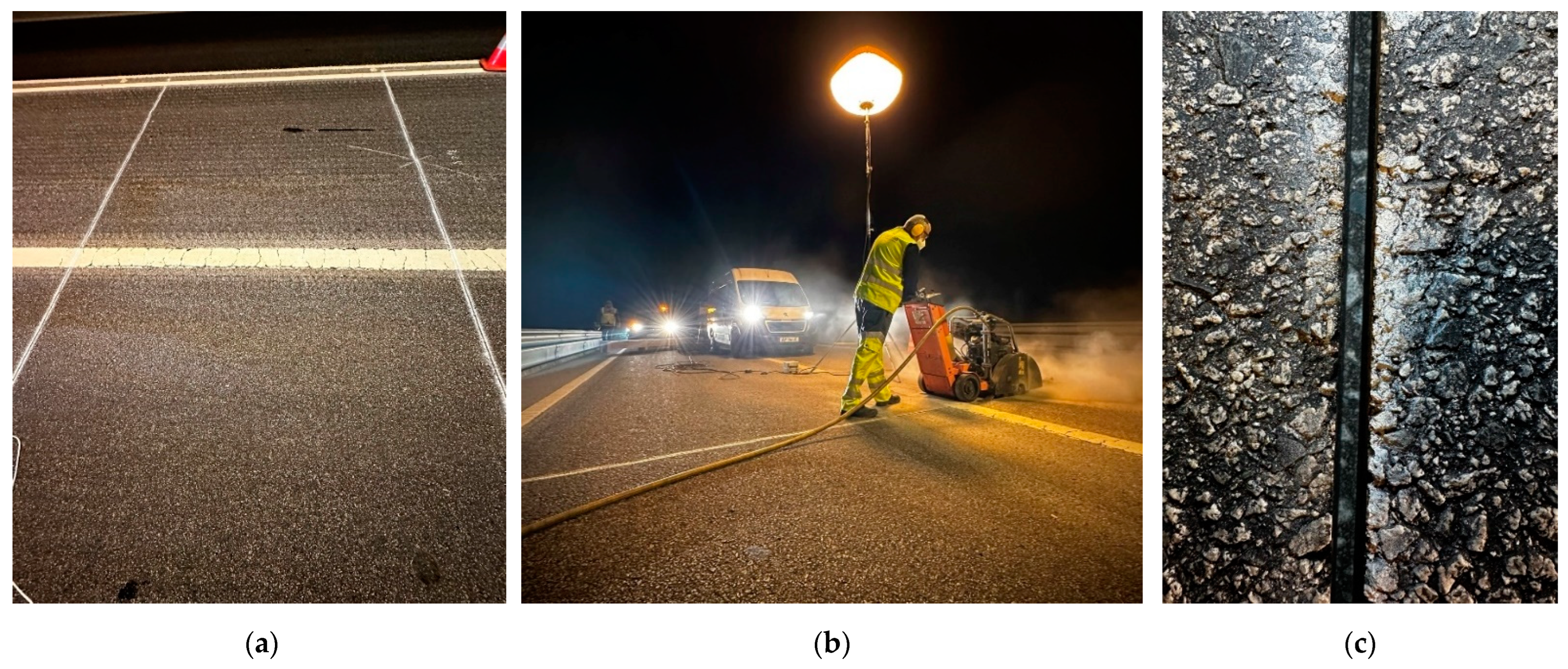
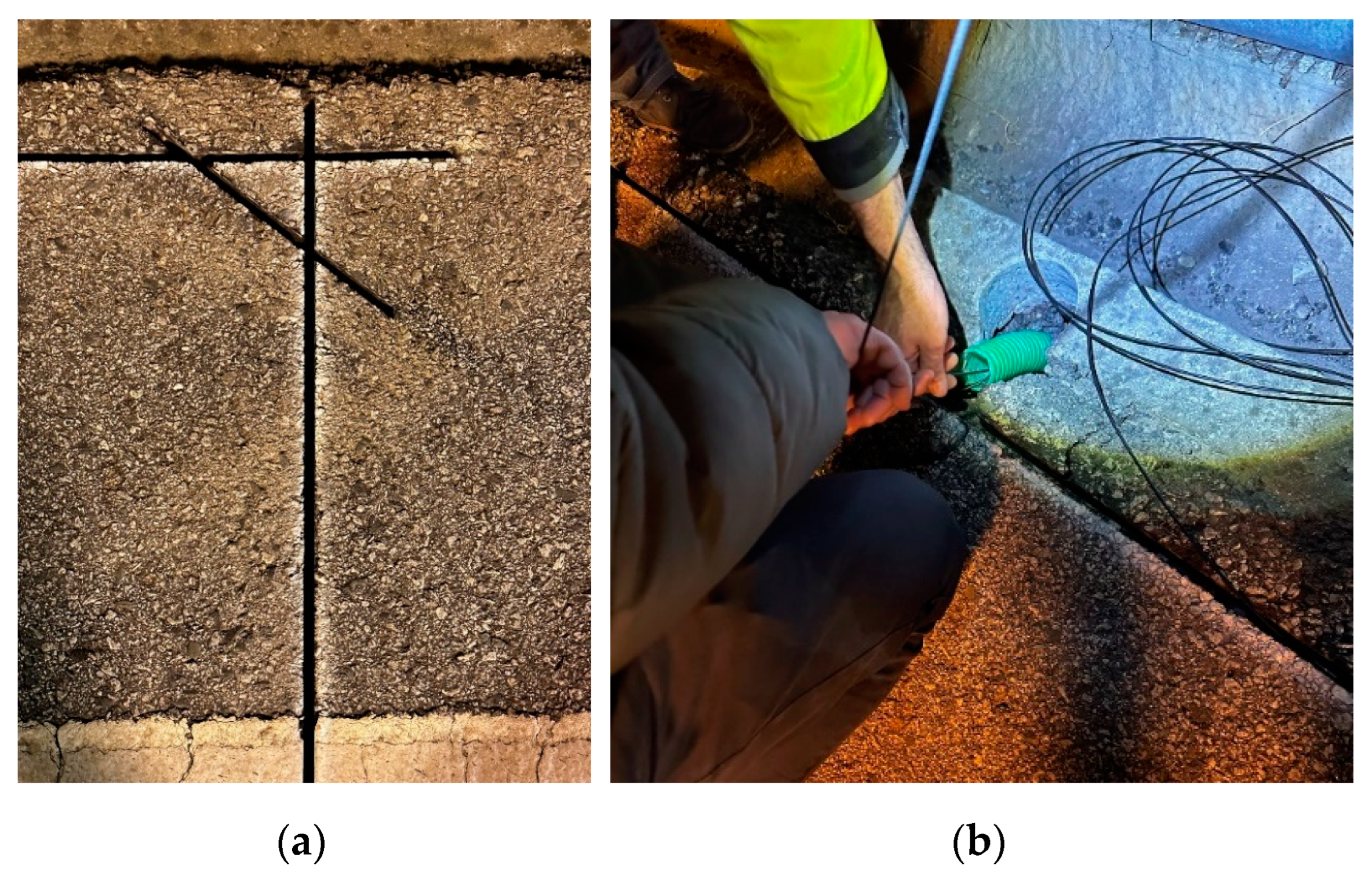
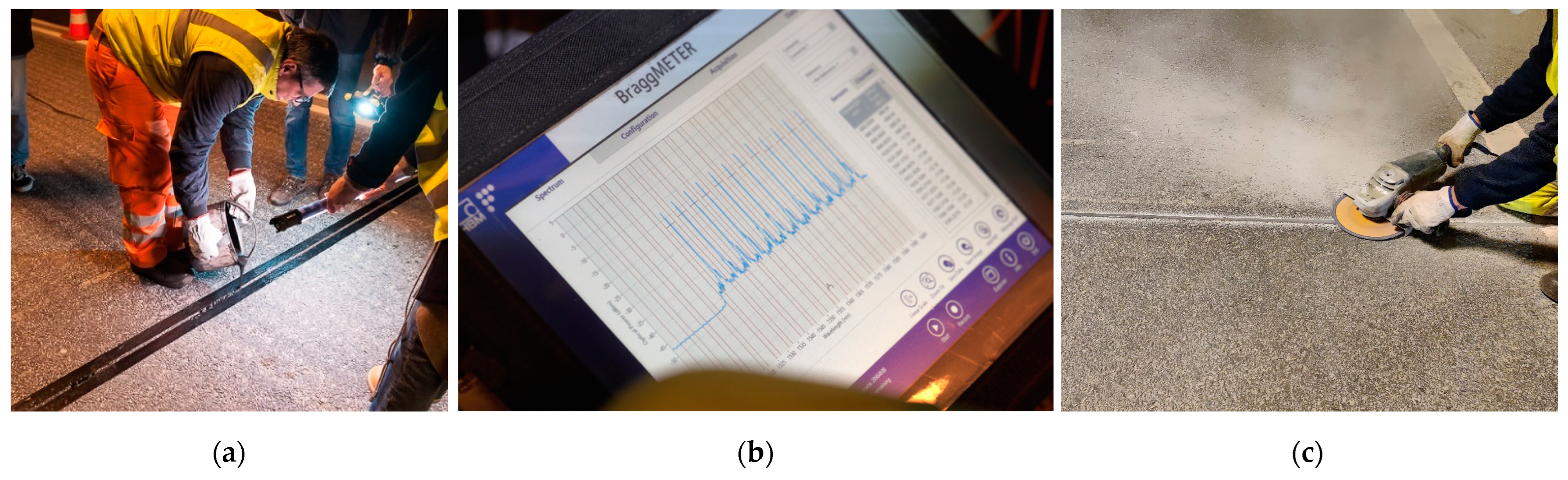
3.4. Pavement Monitoring System Installation
3.5. Pavement Monitoring System Calibration
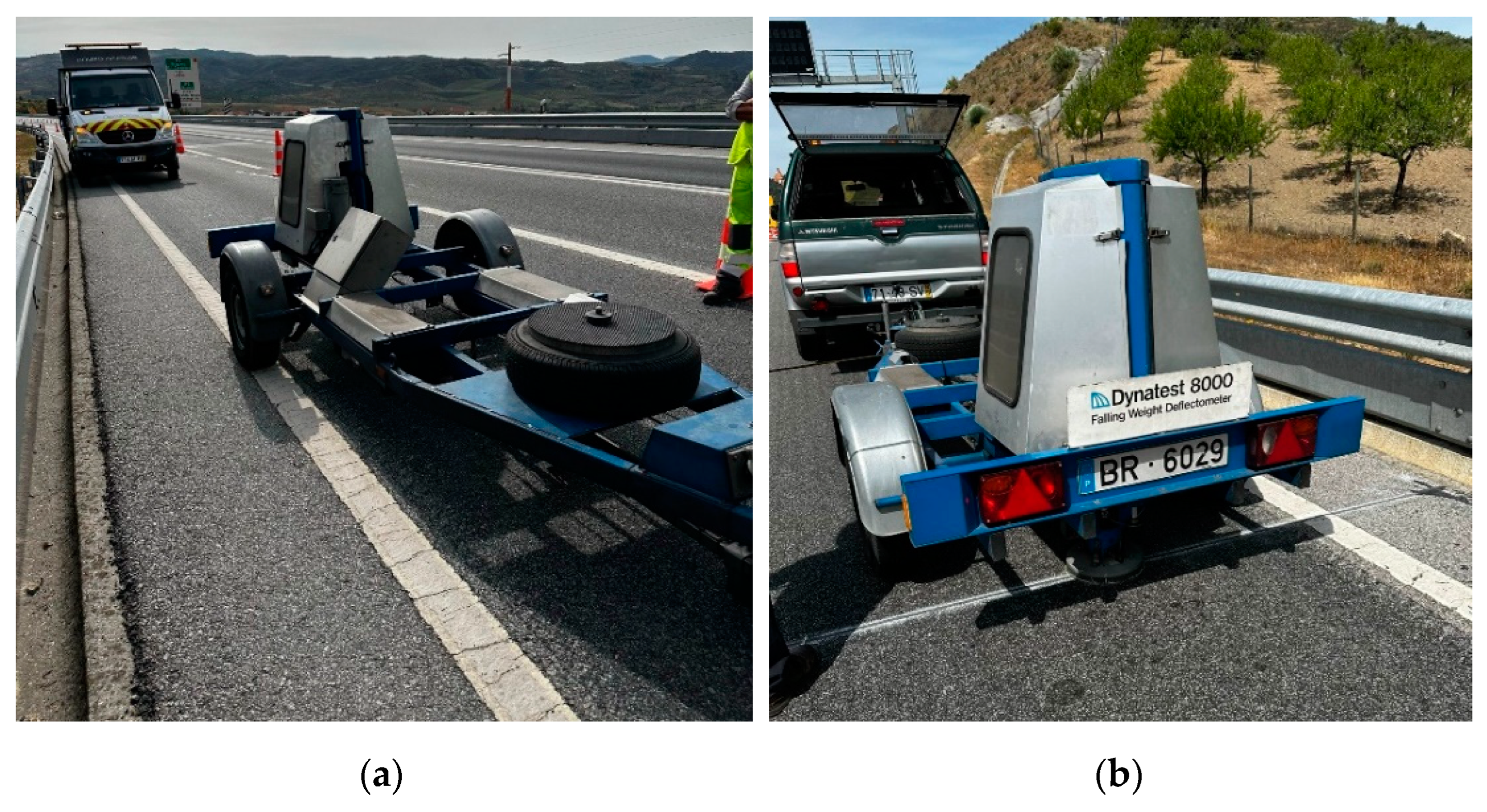
3.5.1. Calibration with Falling Weight Deflectometer Tests
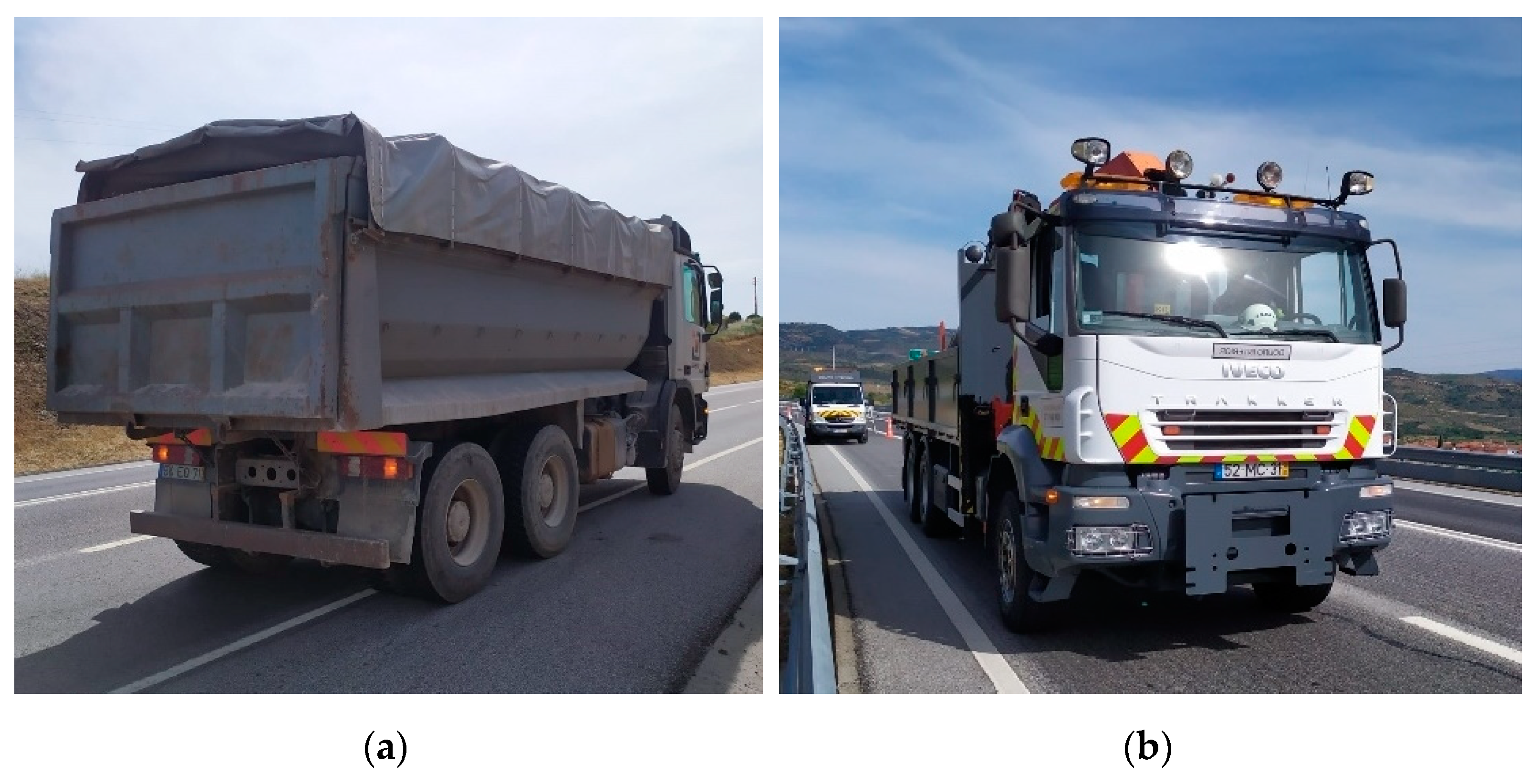
3.5.2. Calibration for Heavy Vehicles Passing with Known Loads
3.6. Analysis of the Results Obtained during the Monitoring System Calibration
4. Results and Discussion
4.1. Falling Weight Deflectometer Test Results
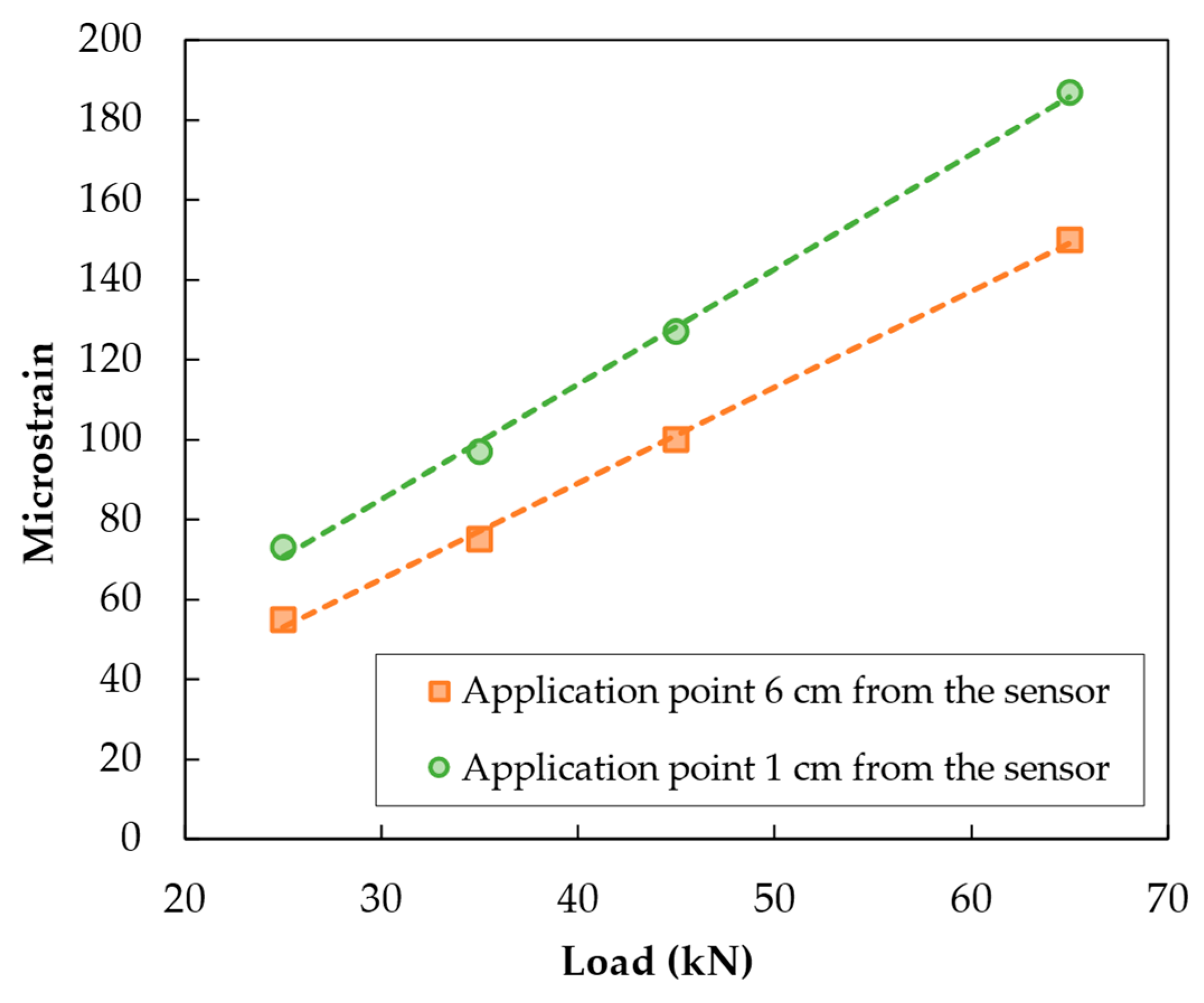
4.1.1. Sensor Sensitivity
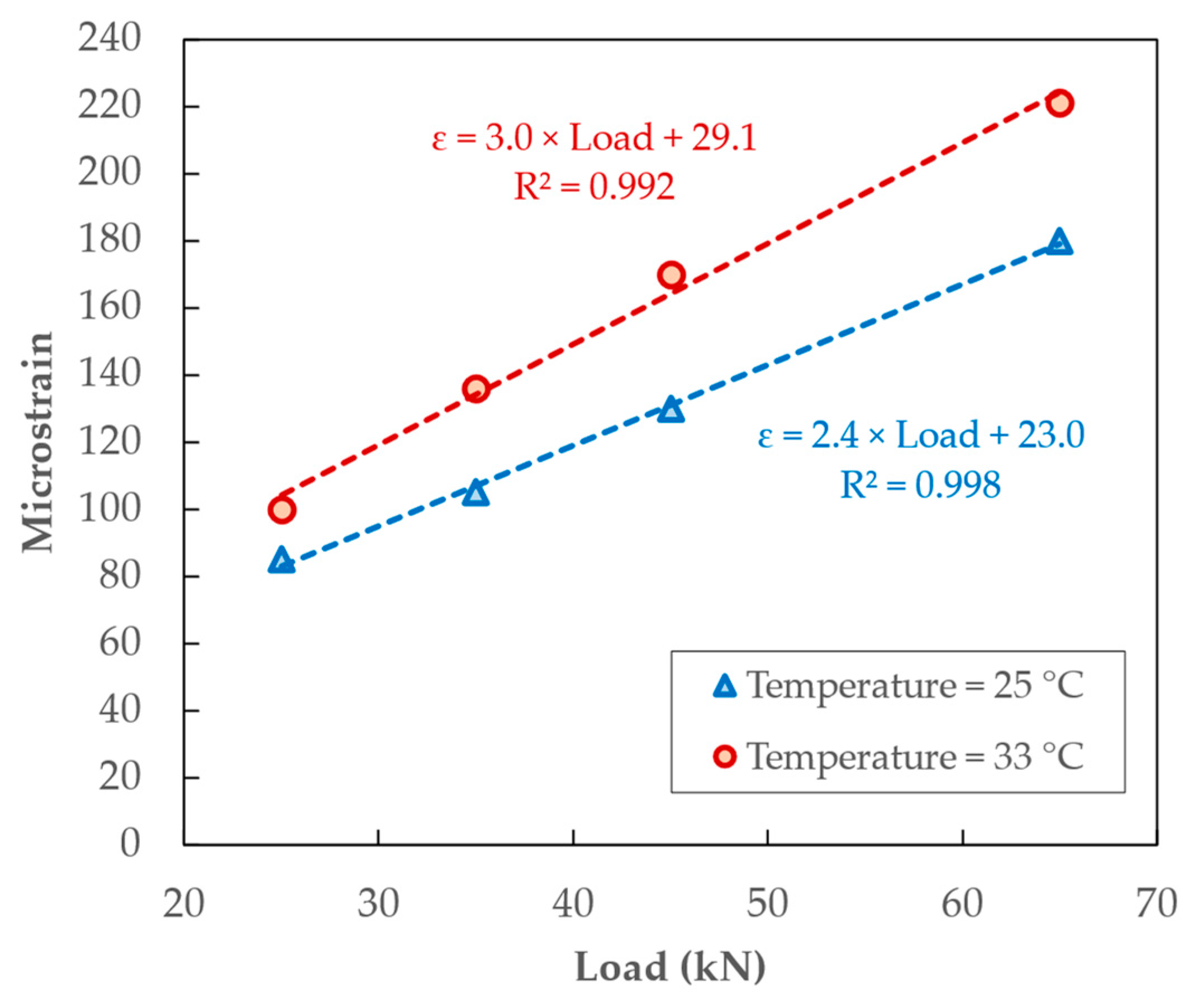
4.1.2. Temperature Influence
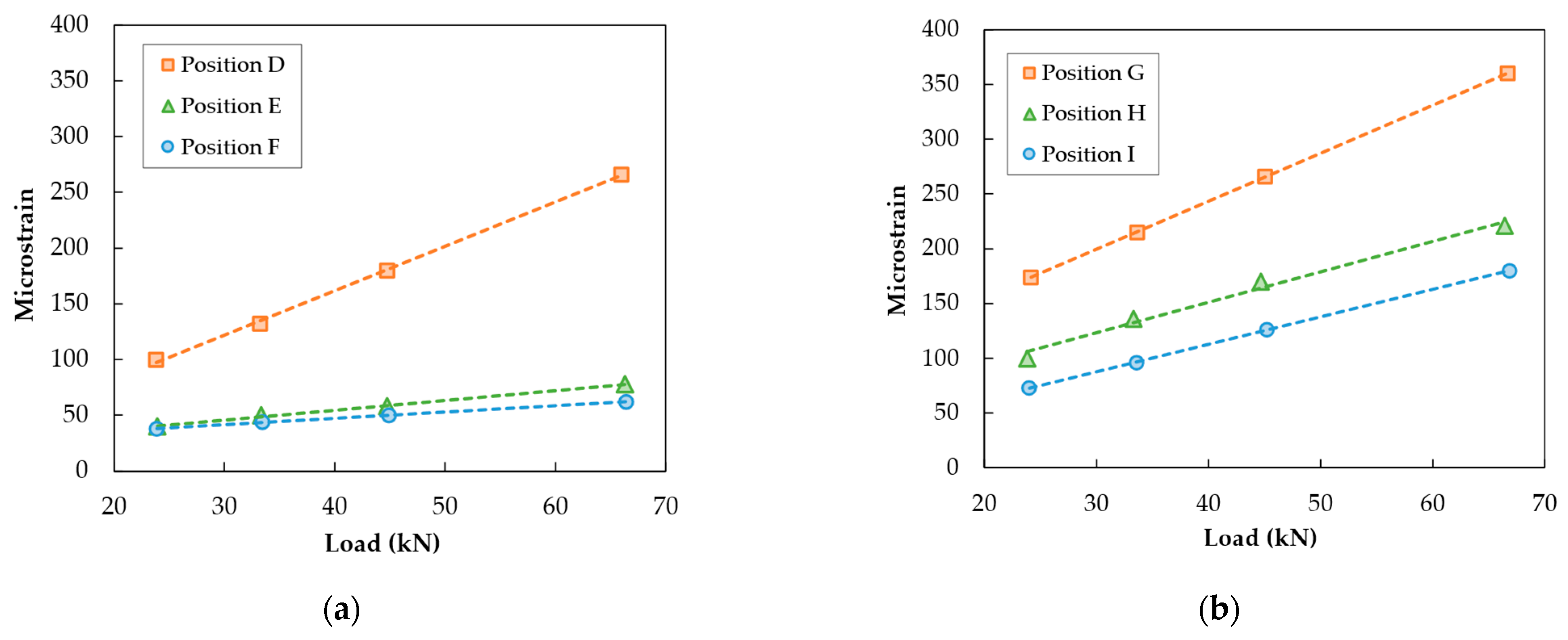
4.1.3. Relationship between Loads and Strains
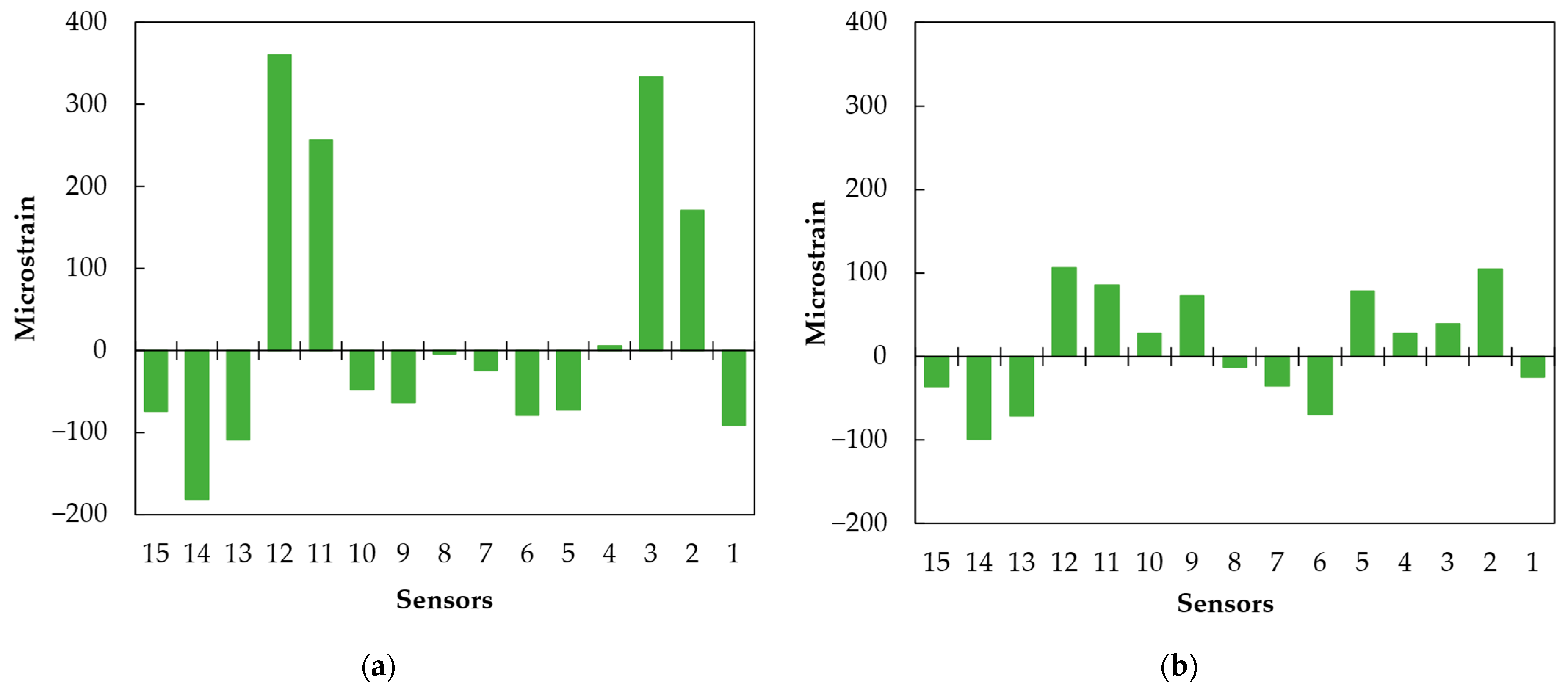
4.1.4. Transverse Strain Basins
4.2. Results from the Dynamic Loading Effect of Heavy Vehicles
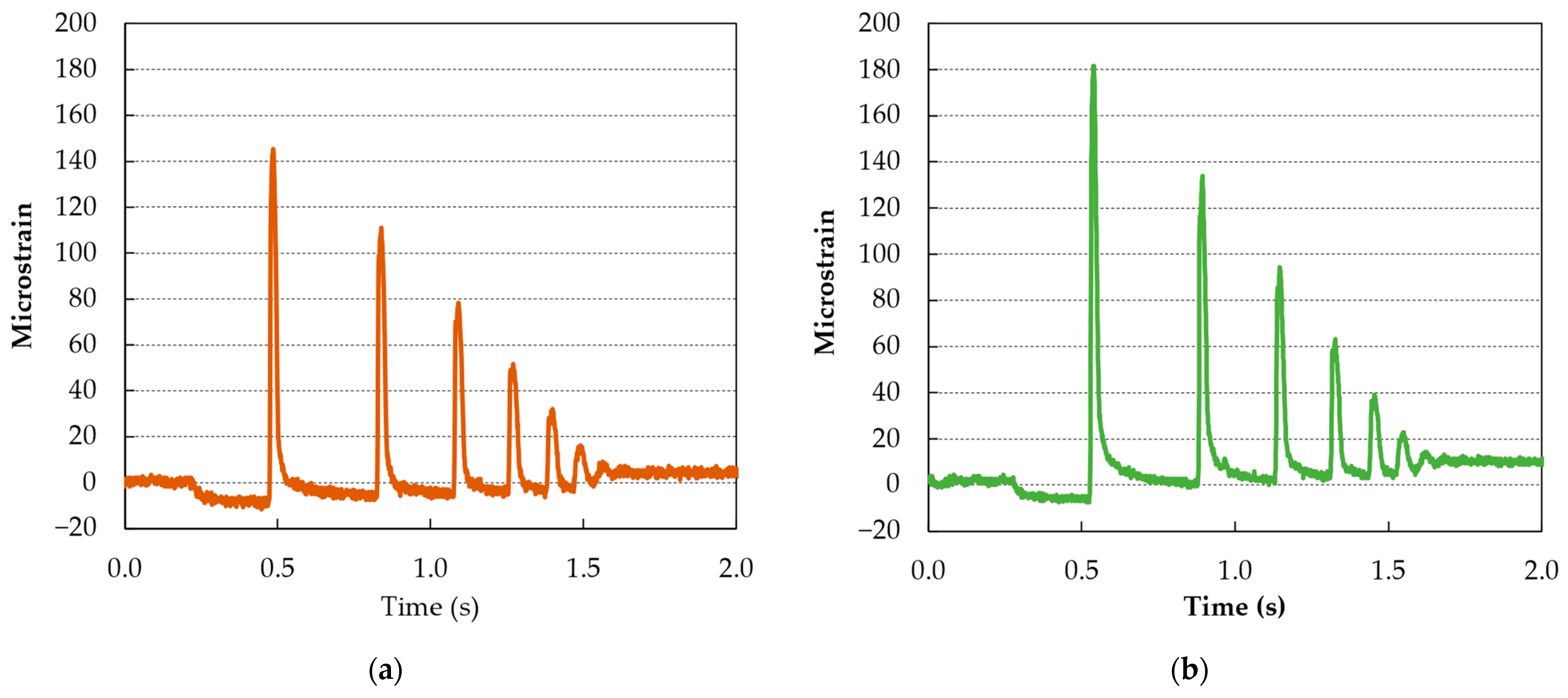
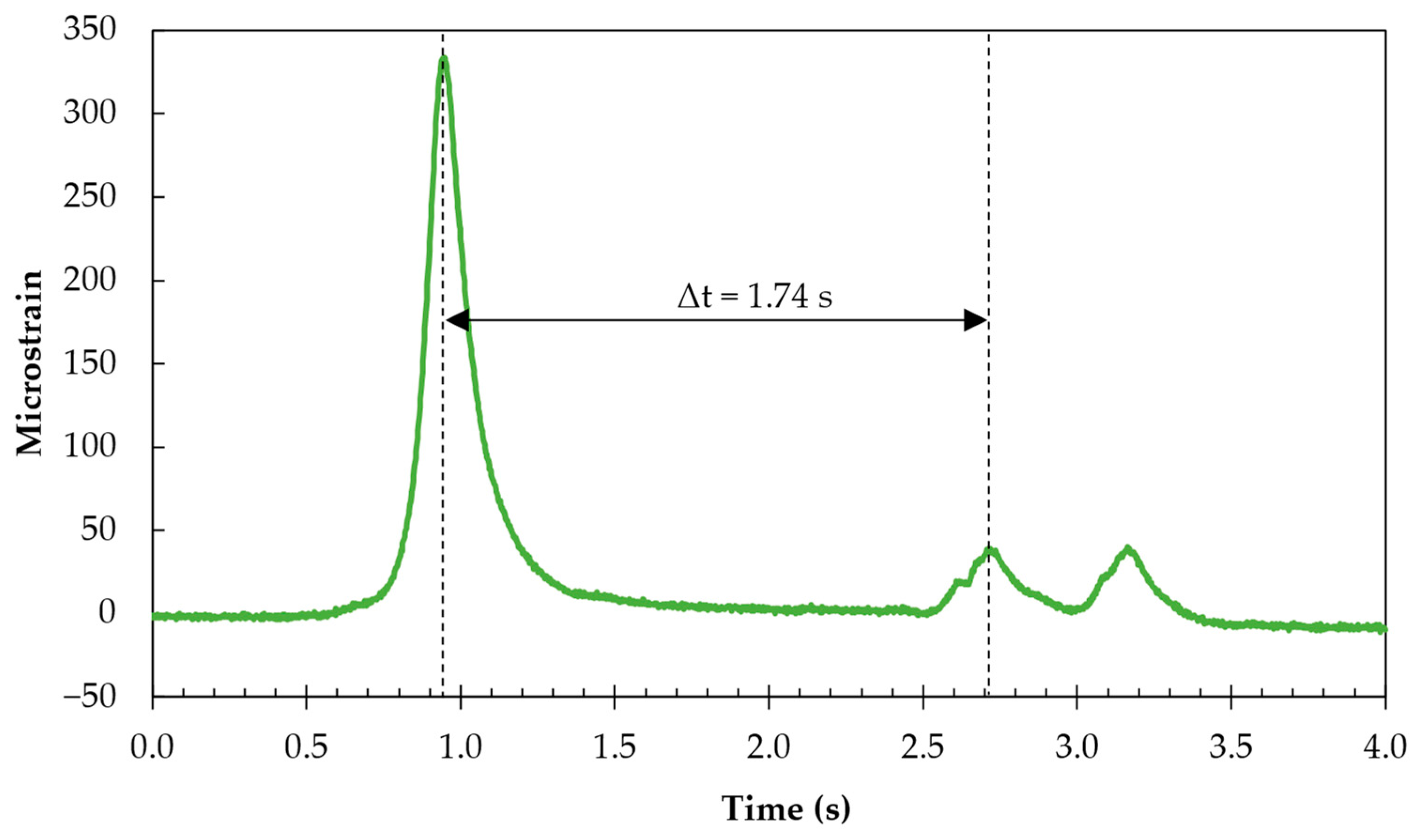
4.2.1. Strains Caused by Heavy Vehicles
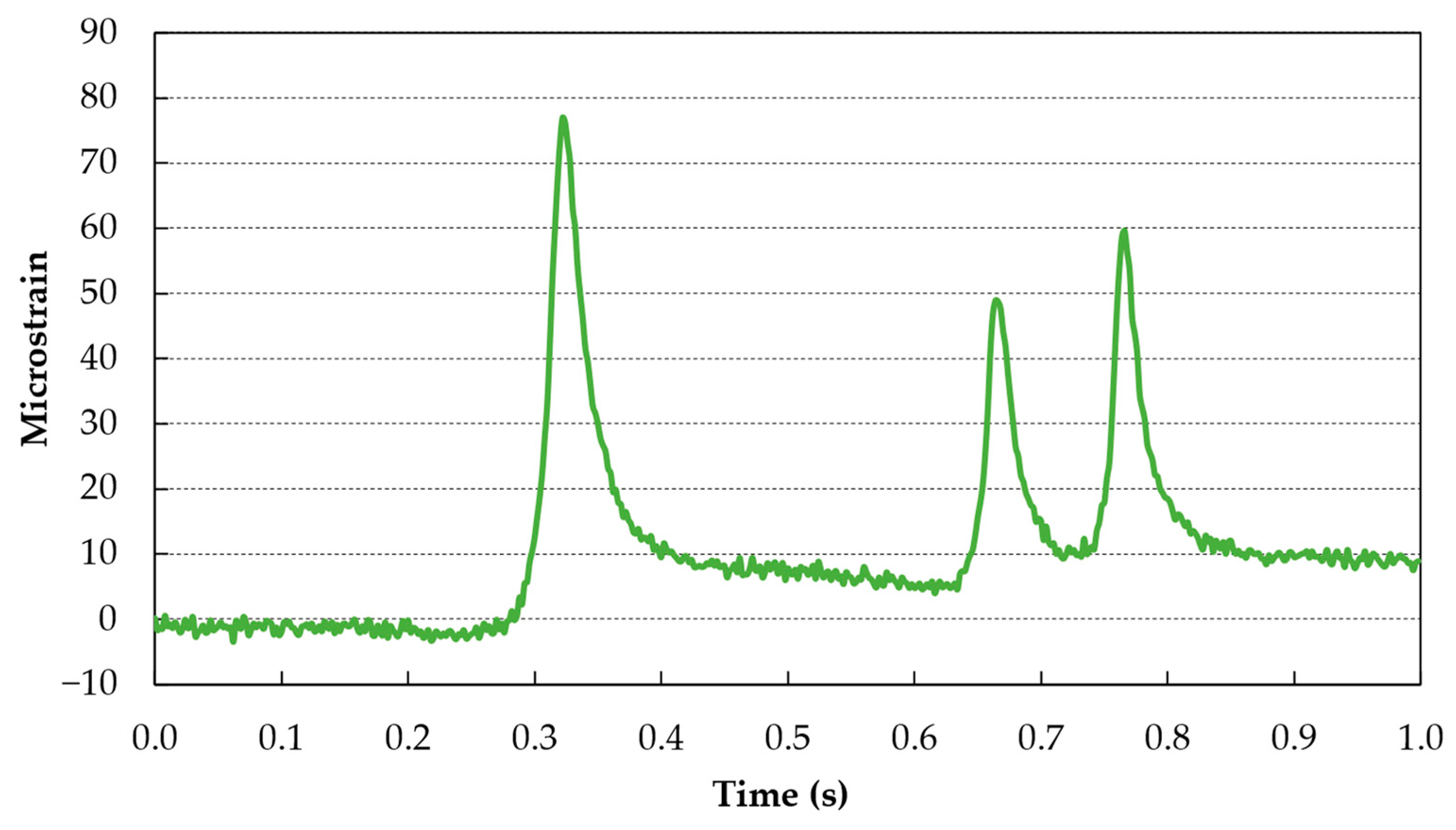
4.2.2. Influence of the Type of Axle on the Strain Lateral Distribution
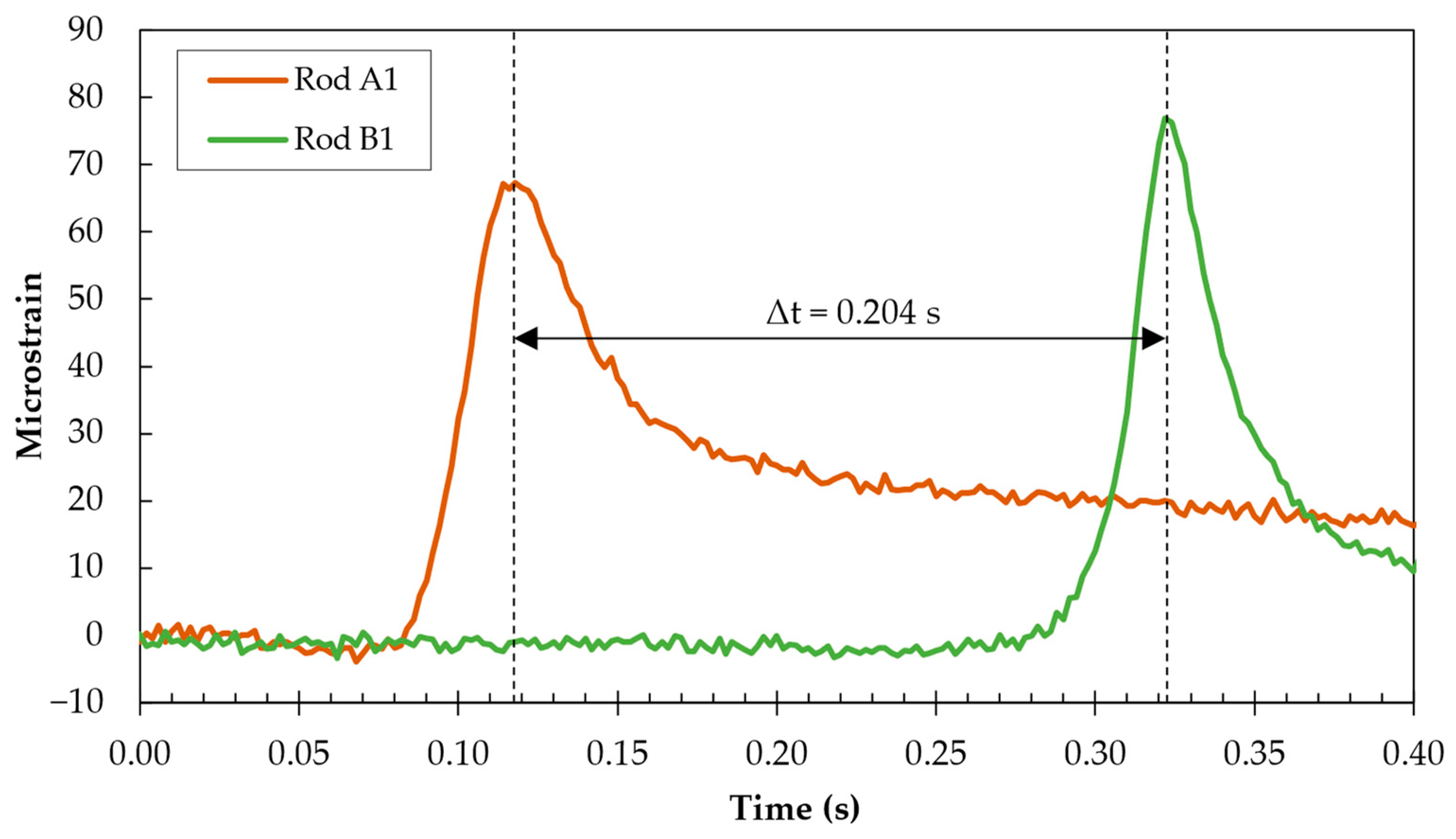
4.2.3. Transverse and Longitudinal Deformation Basins
5. Conclusions
- The type of sensors used in this work is very accurate; slight differences in the position of the load (in the order of 50 mm) may cause significant differences (20% to 25%) in the strains obtained for the same load, justifying the shorter distances (150 mm) between the sensors used in two of the instrumented rods, namely near the wheel tracks;
- One of this technology’s critical issues is the temperature calibration of the sensors, as they are susceptible to temperature variations. However, a calibration factor can be applied to each sensor to correct the readings using the software (Catman) provided by the supplier of the sensors. Moreover, it was observed that a temperature rise of 8 °C increased the measured tensile strains by about 20%;
- The FWD tests performed with different loads for calibration of the monitoring system showed that a linear relationship could be established between the applied load and the strains obtained, which will be used in the future to analyse the data gathered from this monitoring system, to estimate the loads applied to the pavement surface;
- The effects of the type and number of axles of each vehicle on the response of the pavement at each load application were analysed in this work, using 3D representations of the strains over time; the fibreglass rods instrumented with 15 strain sensors were essential for the accurate representation of this information, yielding reliable knowledge of the pavement behaviour;
- The rods instrumented with 15 strain sensors provide a more comprehensive analysis of the transverse variation in the strains in a pavement section, which can be associated with the temperature data measured by the specific sensors installed for that purpose to assess the evolution of the pavement performance over its lifecycle, generating valuable information to develop pavement performance models.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chen, J.; Dan, H.; Ding, Y.; Gao, Y.; Guo, M.; Guo, S.; Han, B.; Hong, B.; Hou, Y.; Hu, C.; et al. New innovations in pavement materials and engineering: A review on pavement engineering research 2021. J. Traffic Transp. Eng. (Engl. Ed.) 2021, 8, 815–999. [Google Scholar] [CrossRef]
- Kara De Maeijer, P.; Voet, E.; Windels, J.; Van den Bergh, W.; Vuye, C.; Braspenninckx, J. Fiber Bragg grating monitoring system for heavy-duty pavements. In Proceedings of the 7th Euroasphalt & Eurobitume Congress, Virtual, 16–18 June 2021. [Google Scholar]
- Ai, C.; Rahman, A.; Xiao, C.; Yang, E.; Qiu, Y. Analysis of measured strain response of asphalt pavements and relevant prediction models. Int. J. Pavement Eng. 2017, 18, 1089–1097. [Google Scholar] [CrossRef]
- Hou, Y.; Li, Q.; Zhang, C.; Lu, G.; Ye, Z.; Chen, Y.; Wang, L.; Cao, D. The State-of-the-Art Review on Applications of Intrusive Sensing, Image Processing Techniques, and Machine Learning Methods in Pavement Monitoring and Analysis. Engineering 2021, 7, 845–856. [Google Scholar] [CrossRef]
- Braunfelds, J.; Senkans, U.; Skels, P.; Janeliukstis, R.; Salgals, T.; Redka, D.; Lyashuk, I.; Porins, J.; Spolitis, S.; Haritonovs, V.; et al. FBG-Based Sensing for Structural Health Monitoring of Road Infrastructure. J. Sens. 2021, 2021, 8850368. [Google Scholar] [CrossRef]
- Sebaaly, P.; Tabatabaee, N.; Kulakowski, B.; Scullion, T. Instrumentation for Flexible Pavements—Field Performance of Selected Sensors, Volume 1: Final Report; Pennsylvania Transportation Institut: University Park, PA, USA, 1992. [Google Scholar]
- Huff, R.; Berthelot, C.; Daku, B. Continuous primary dynamic pavement response system using piezoelectric axle sensors. Can. J. Civ. Eng. 2011, 32, 260–269. [Google Scholar] [CrossRef]
- Duong, N.S.; Blanc, J.; Hornych, P.; Bouveret, B.; Carroget, J.; Le Feuvre, Y. Continuous strain monitoring of an instrumented pavement section. Int. J. Pavement Eng. 2019, 20, 1435–1450. [Google Scholar] [CrossRef]
- Liu, H.; Ge, W.; Pan, Q.; Hu, R.; Lv, S.; Huang, T. Characteristics and analysis of dynamic strain response on typical asphalt pavement using Fiber Bragg Grating sensing technology. Constr. Build. Mater. 2021, 310, 125242. [Google Scholar] [CrossRef]
- Tan, Y.Q.; Wang, H.-P.; Sun, Z.-J.; Li, Y.-W.; Shi, X. Calibration method of FBG sensor based on asphalt pavement indoor small size test. In Proceedings of the 2011 International Conference on Transportation, Mechanical, and Electrical Engineering (TMEE), Changchun, China, 16–18 December 2011; pp. 1390–1394. [Google Scholar]
- Frank, M.H.; Jason, K.R.; Peter, D.F. A strain-isolated fibre Bragg grating sensor for temperature compensation of fibre Bragg grating strain sensors. Meas. Sci. Technol. 1998, 9, 1163. [Google Scholar] [CrossRef]
- Song, M.; Lee, S.B.; Choi, S.S.; Lee, B. Simultaneous Measurement of Temperature and Strain Using Two Fiber Bragg Gratings Embedded in a Glass Tube. Opt. Fiber Technol. 1997, 3, 194–196. [Google Scholar] [CrossRef]
- Patrick, H.J.; Williams, G.M.; Kersey, A.D.; Pedrazzani, J.R.; Vengsarkar, A.M. Hybrid fiber Bragg grating/long period fiber grating sensor for strain/temperature discrimination. IEEE Photonics Technol. Lett. 1996, 8, 1223–1225. [Google Scholar] [CrossRef]
- Jaehoon, J.; Hui, N.; Namkyoo, P.; Byoungho, L. Simultaneous measurement of strain and temperature using a single fiber Bragg grating written in an erbium:ytterbium-doped fiber. In Proceedings of Technical Digest. Summaries of Papers Presented at the Conference on Lasers and Electro-Optics. Postconference Edition. CLEO ’99. Conference on Lasers and Electro-Optics (IEEE Cat. No.99CH37013), 28 May 1999; IEEE: Piscataway, PA, USA, 1999; p. 386. [Google Scholar]
- Wang, H.-P.; Dai, J.-G.; Wang, X.-Z. Improved temperature compensation of fiber Bragg grating-based sensors applied to structures under different loading conditions. Opt. Fiber Technol. 2021, 63, 102506. [Google Scholar] [CrossRef]
- Leal-Junior, A.G.; Díaz, C.A.R.; Frizera, A.; Marques, C.; Ribeiro, M.R.N.; Pontes, M.J. Simultaneous measurement of pressure and temperature with a single FBG embedded in a polymer diaphragm. Opt. Laser Technol. 2019, 112, 77–84. [Google Scholar] [CrossRef]
- Han, D.; Liu, G.; Xi, Y.; Zhao, Y. Theoretical analysis on the measurement accuracy of embedded strain sensor in asphalt pavement dynamic response monitoring based on FEM. Struct. Control Health Monit. 2022, 29, e3140. [Google Scholar] [CrossRef]
- Liu, Z.; Gu, X.; Wu, C.; Ren, H.; Zhou, Z.; Tang, S. Studies on the validity of strain sensors for pavement monitoring: A case study for a fiber Bragg grating sensor and resistive sensor. Constr. Build. Mater. 2022, 321, 126085. [Google Scholar] [CrossRef]
- Rebelo, F.; Dabiri, A.; Silva, H.; Oliveira, J. Laboratory Investigation of Sensors Reliability to Allow Their Incorporation in a Real-Time Road Pavement Monitoring System. In Proceedings of the 3rd ISIC International Conference on Trends on Construction in the Post-Digital Era, Guimarães, Portugal, 26–29 September 2022; pp. 490–501. [Google Scholar]
- Barrias, A.; Casas, J.R.; Villalba, S. A Review of Distributed Optical Fiber Sensors for Civil Engineering Applications. Sensors 2016, 16, 748. [Google Scholar] [CrossRef]
- Majumder, M.; Gangopadhyay, T.K.; Chakraborty, A.K.; Dasgupta, K.; Bhattacharya, D.K. Fibre Bragg gratings in structural health monitoring—Present status and applications. Sens. Actuators A Phys. 2008, 147, 150–164. [Google Scholar] [CrossRef]
- Lei, Y.; Hu, X.; Wang, H.; You, Z.; Zhou, Y.; Yang, X. Effects of vehicle speeds on the hydrodynamic pressure of pavement surface: Measurement with a designed device. Measurement 2017, 98, 1–9. [Google Scholar] [CrossRef]
- Hottinger Bruel & Kjaer. NewLight Optical Fiber Sensors. Available online: https://www.hbm.com/en/4599/new-light-optical-fiber-sensors/?product_type_no=newLight (accessed on 23 June 2023).
- Zhou, Z.; Liu, W.; Huang, Y.; Wang, H.; Jianping, H.; Huang, M.; Jinping, O. Optical fiber Bragg grating sensor assembly for 3D strain monitoring and its case study in highway pavement. Mech. Syst. Signal Process. 2012, 28, 36–49. [Google Scholar] [CrossRef]
- Chen, J.; Liu, B.; Zhang, H. Review of fiber Bragg grating sensor technology. Front. Optoelectron. China 2011, 4, 204–212. [Google Scholar] [CrossRef]
- Kara De Maeijer, P.; Van den Bergh, W.; Vuye, C. Fiber Bragg Grating Sensors in Three Asphalt Pavement Layers. Infrastructures 2018, 3, 16. [Google Scholar] [CrossRef]
- Xiang, P.; Wang, H. Optical fibre-based sensors for distributed strain monitoring of asphalt pavements. Int. J. Pavement Eng. 2018, 19, 842–850. [Google Scholar] [CrossRef]
- Quinimar. QuiniResin Fix. Available online: https://quinimar.pt/pt/quiniresin.htm (accessed on 10 June 2023).
- Wang, J.; Han, Y.; Cao, Z.; Xu, X.; Zhang, J.; Xiao, F. Applications of optical fiber sensor in pavement Engineering: A review. Constr. Build. Mater. 2023, 400, 132713. [Google Scholar] [CrossRef]
- Hottinger Bruel & Kjaer. Catman Data Acquisition Software: Connect. Measure. Visualise. Analyse. Available online: https://www.hbm.com/en/2290/catman-data-acquisition-software/?product_type_no=DAQ%20Software (accessed on 15 June 2023).
- Sudarsanan, N.; Kim, Y.R. A critical review of the fatigue life prediction of asphalt mixtures and pavements. J. Traffic Transp. Eng. 2022, 9, 808–835. [Google Scholar] [CrossRef]









Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rebelo, F.J.P.; Oliveira, J.R.M.; Silva, H.M.R.D.; Sá, J.O.e.; Marecos, V.; Afonso, J. Installation and Use of a Pavement Monitoring System Based on Fibre Bragg Grating Optical Sensors. Infrastructures 2023, 8, 149. https://doi.org/10.3390/infrastructures8100149
Rebelo FJP, Oliveira JRM, Silva HMRD, Sá JOe, Marecos V, Afonso J. Installation and Use of a Pavement Monitoring System Based on Fibre Bragg Grating Optical Sensors. Infrastructures. 2023; 8(10):149. https://doi.org/10.3390/infrastructures8100149
Chicago/Turabian StyleRebelo, Francisco J. P., Joel R. M. Oliveira, Hugo M. R. D. Silva, Jorge Oliveira e Sá, Vânia Marecos, and João Afonso. 2023. "Installation and Use of a Pavement Monitoring System Based on Fibre Bragg Grating Optical Sensors" Infrastructures 8, no. 10: 149. https://doi.org/10.3390/infrastructures8100149
APA StyleRebelo, F. J. P., Oliveira, J. R. M., Silva, H. M. R. D., Sá, J. O. e., Marecos, V., & Afonso, J. (2023). Installation and Use of a Pavement Monitoring System Based on Fibre Bragg Grating Optical Sensors. Infrastructures, 8(10), 149. https://doi.org/10.3390/infrastructures8100149