
The Design and Evaluation of a Telematic Automated System of Weight Control for Heavy Vehicles

Abstract
:1. Introduction
- -
- -
- There is no methodology for assessing the measuring tools of a telematic automated control system of weight control for freight vehicles;
- -
- -
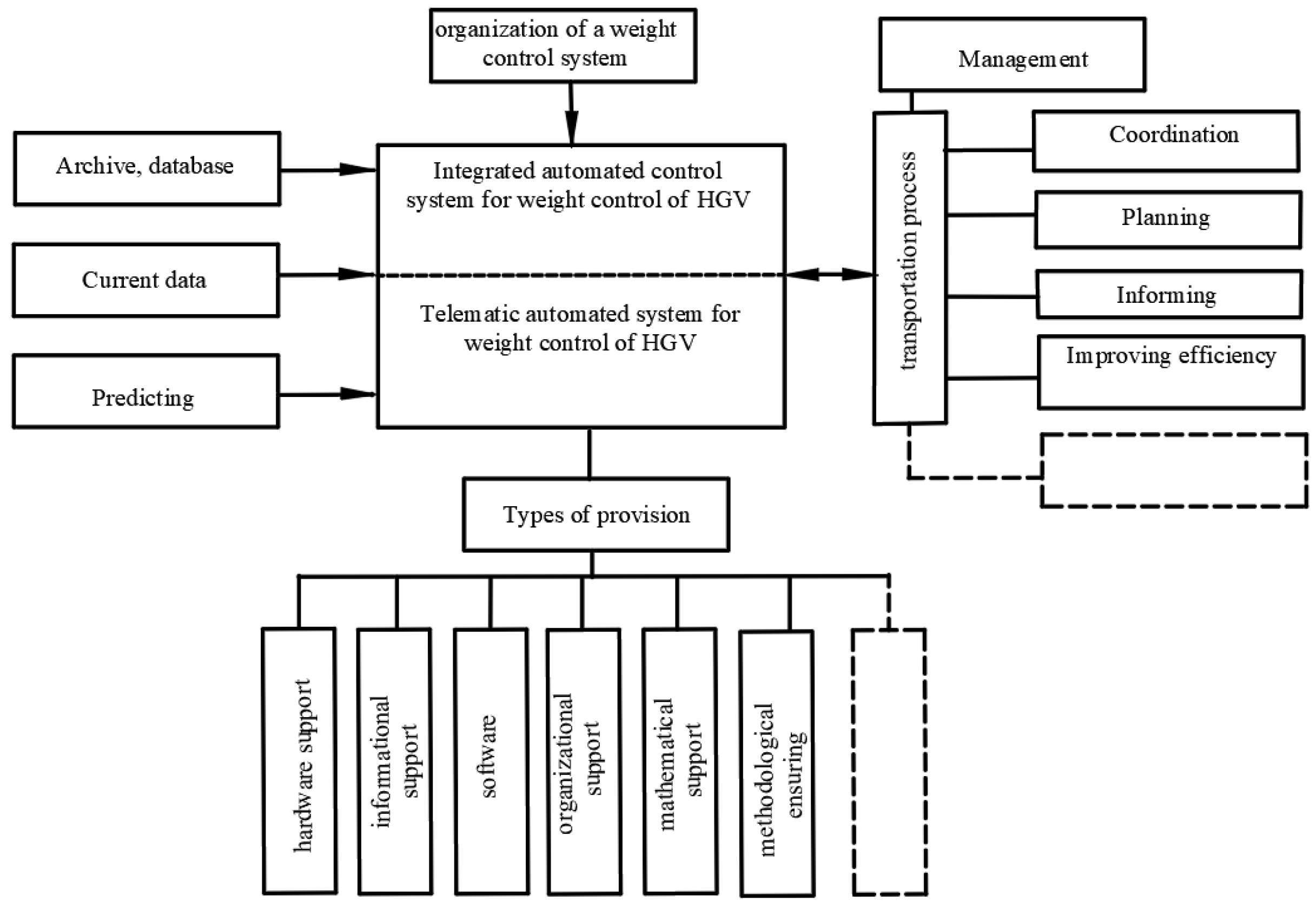
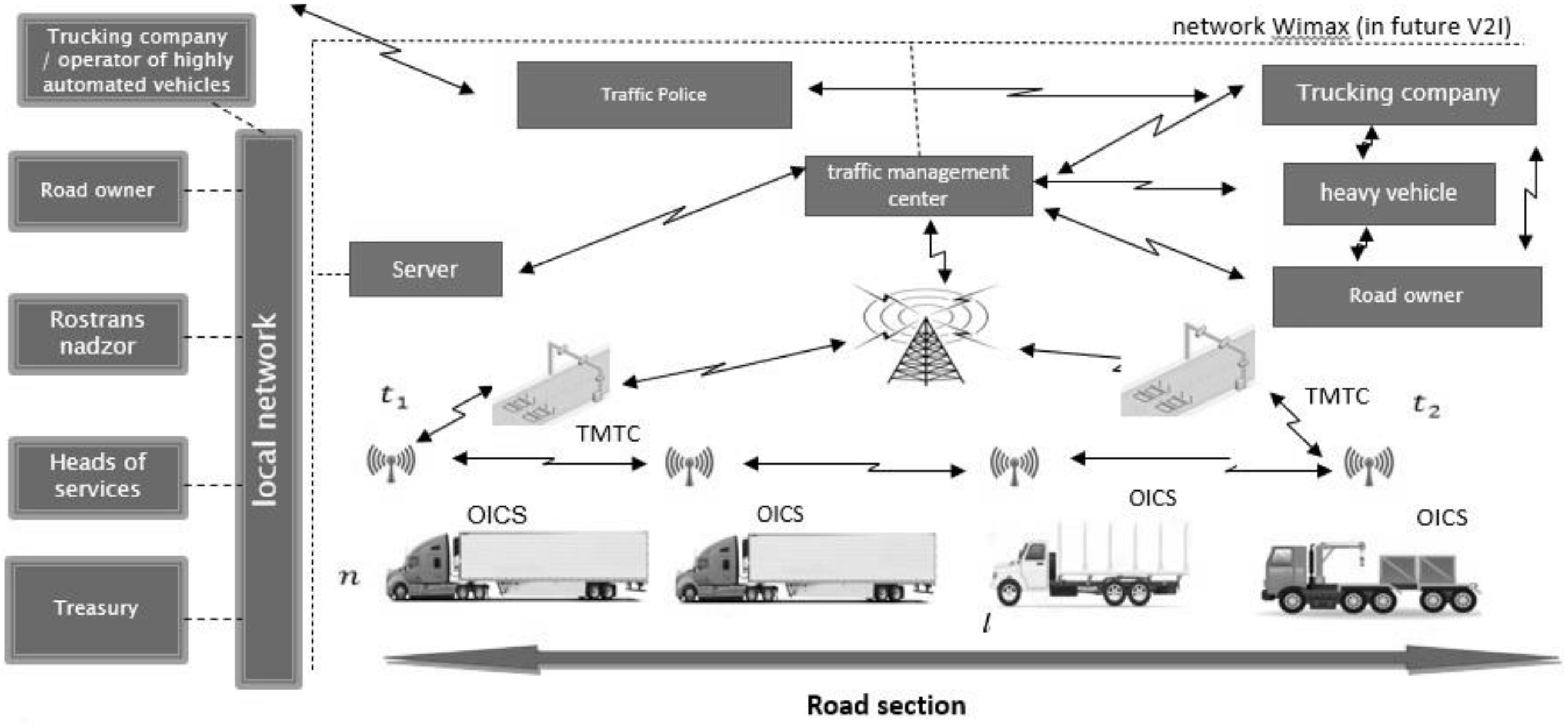
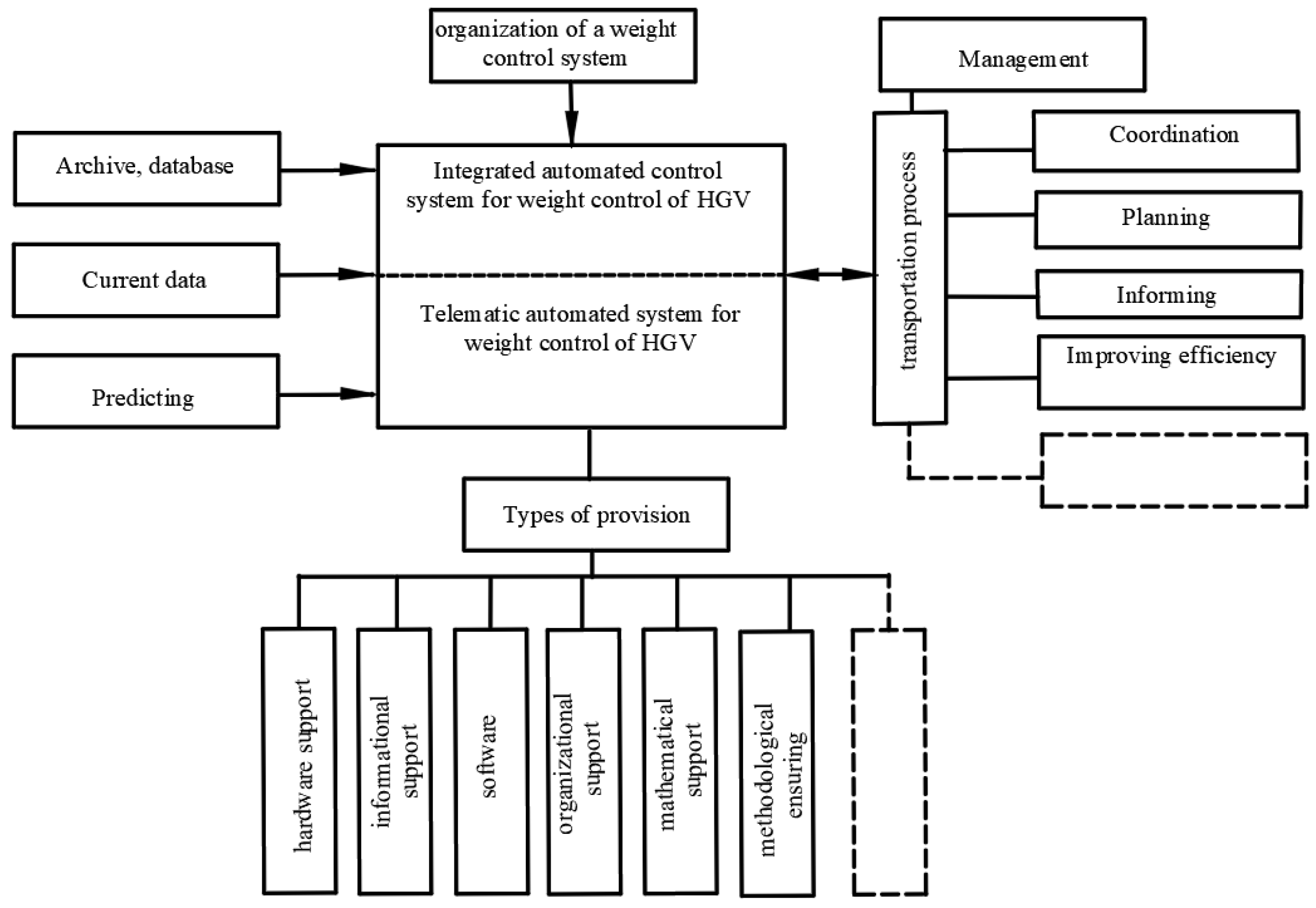
- The development of an architecture of telematic automated control system for the weight control of heavy vehicles, based on the analysis of functional capabilities and the main influencing factors on the transportation process;
- -
2. Methods
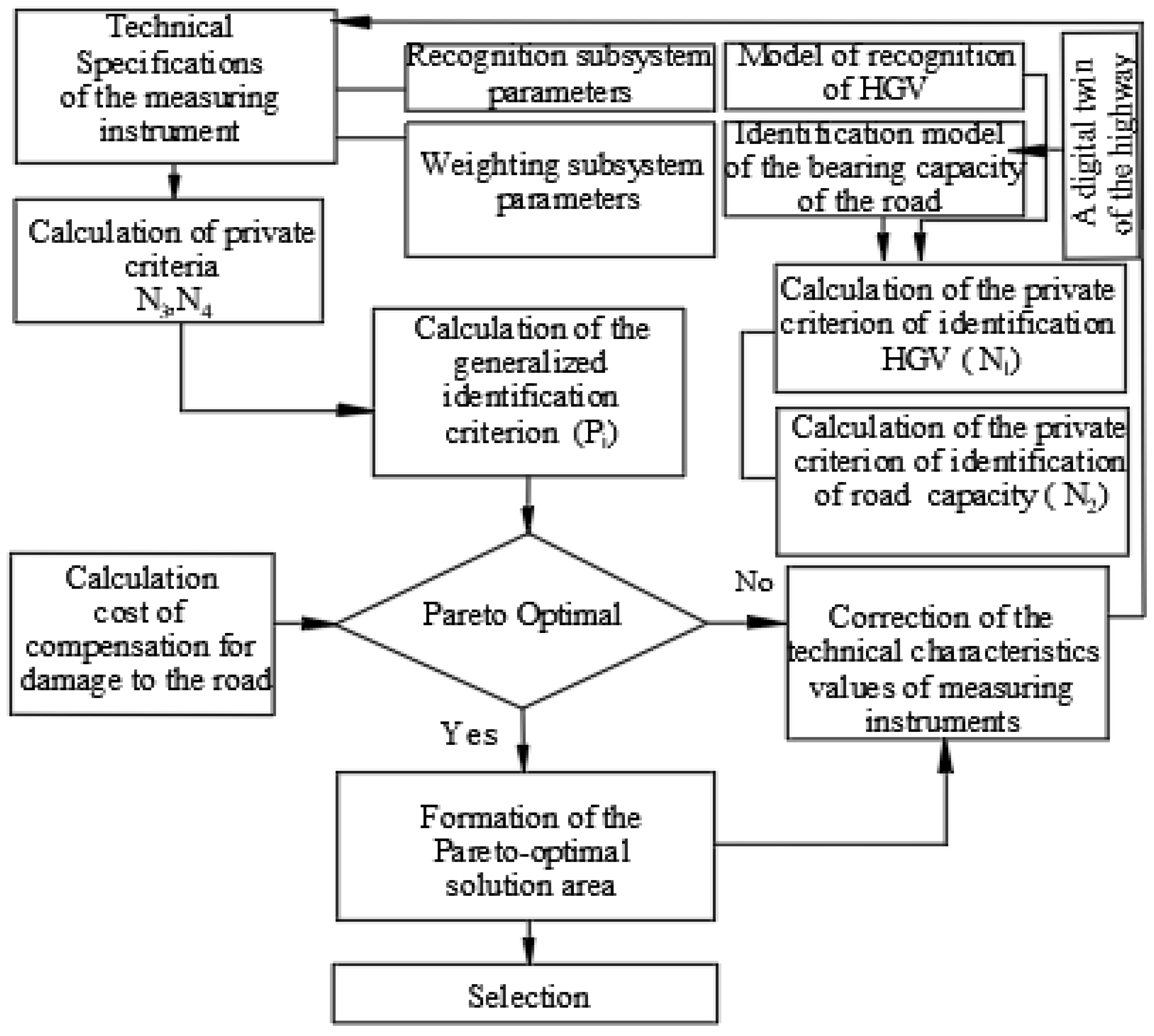
Pi = 0, if Pэk < Pk,
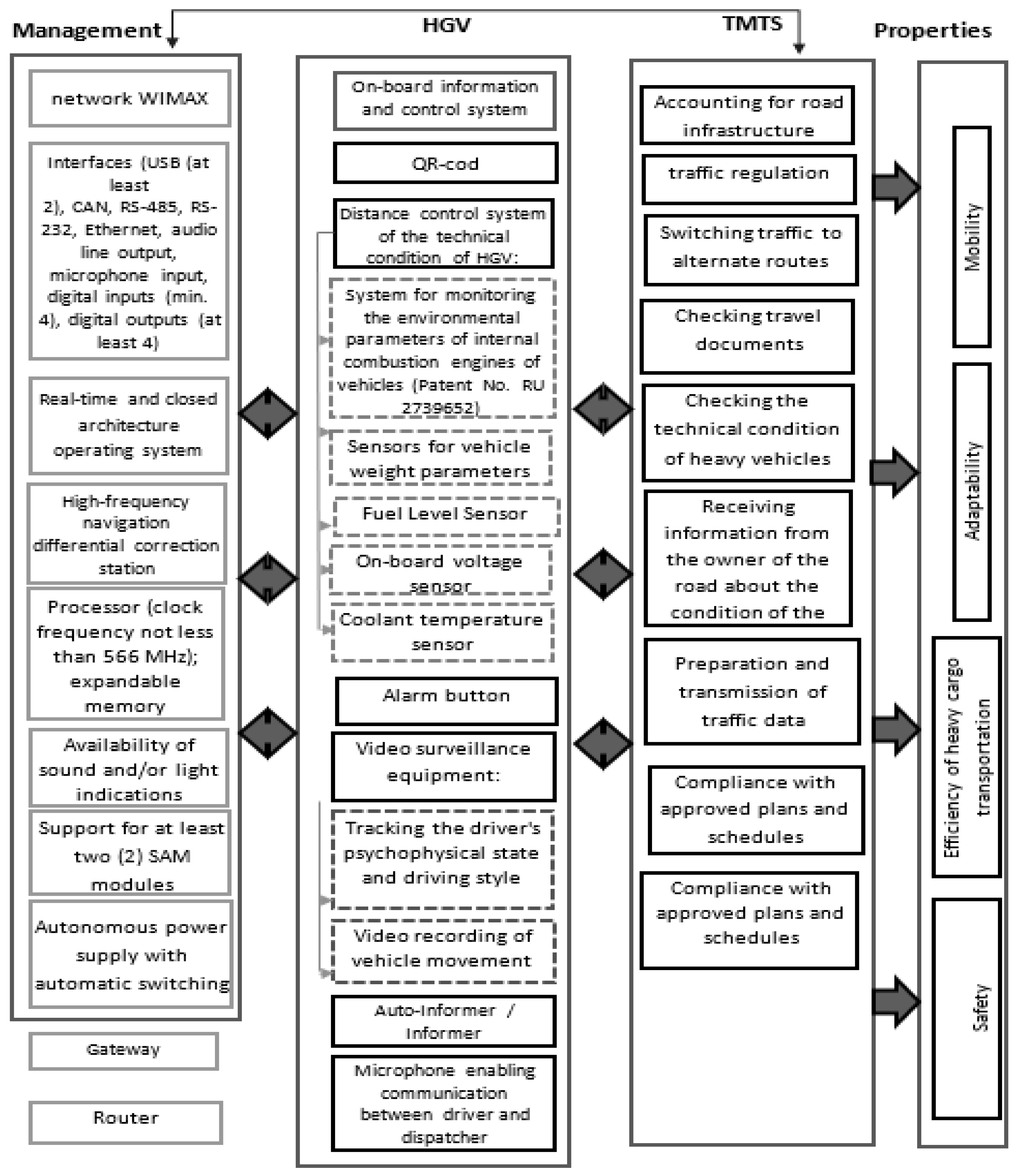
- Strain gauge sensors—determining the weight parameters of the vehicle without reducing the speed;
- 3D laser sensors—detection of vehicle dimensions;
- Photo and video cameras—acquisition of vehicle images and recognition of license plate number plates;
- Computer equipment (protected controller)—recognition of license plate numbers, control of peripheral equipment;
- Communication equipment—data transmission via 3G, fiber-optic channel or satellite communication, data encryption;
- Inductive sensors—determining the fact of passing vehicles and wheel configuration, as well as determining the speed of vehicles. These sensors are not fully capable of measuring the weight and dimensions of vehicles without reducing the speed, so to increase the efficiency of TASWC HGV, it is proposed to implement an algorithm for the rational choice of measuring tools based on criteria approaches.
3. Discussion
4. Results
5. Conclusions
- In this study, the authors conclude that, given the introduction of modern intelligent advanced technologies in the creation of hardware, software and information supply, as well as organizational and methodological supply necessary for an integrated automated system to control the movement of HGV on the road, the ability to implement weight control of heavy vehicles on the road will lead to improved traffic management.
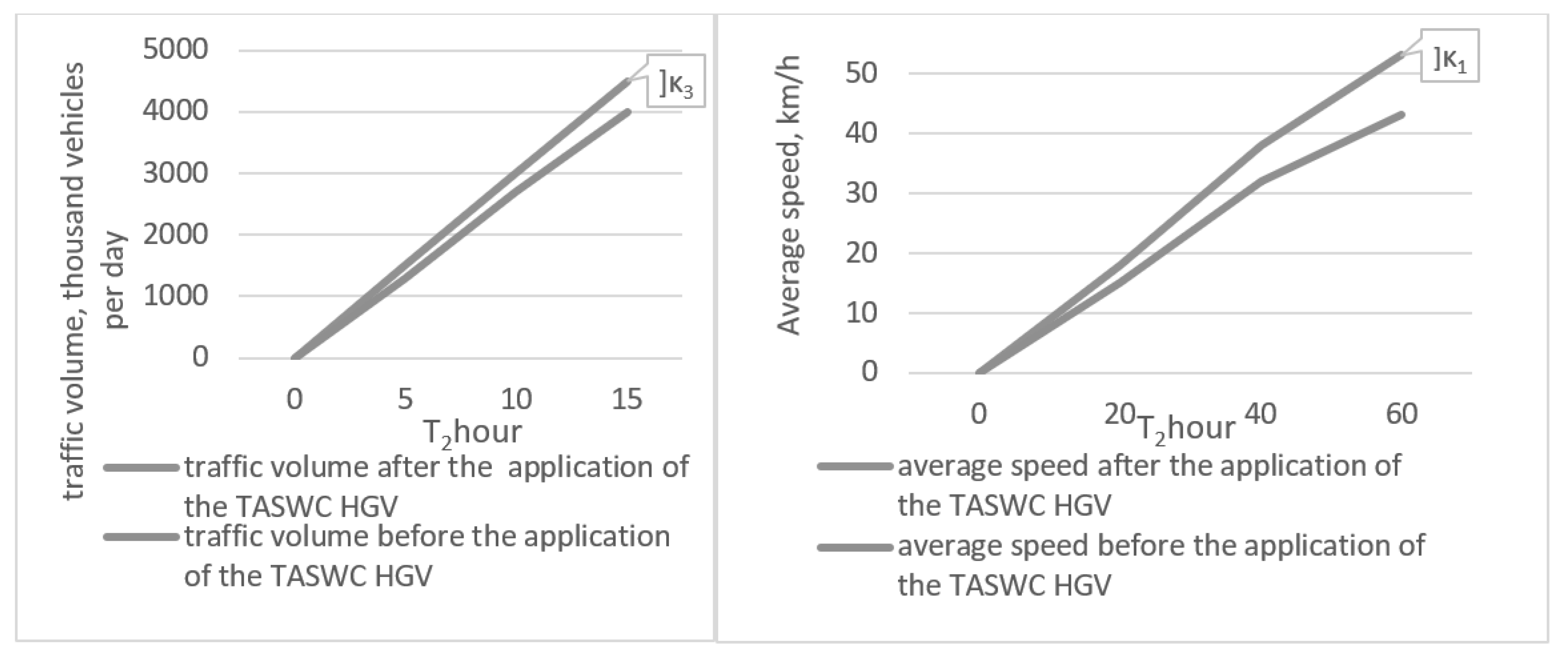
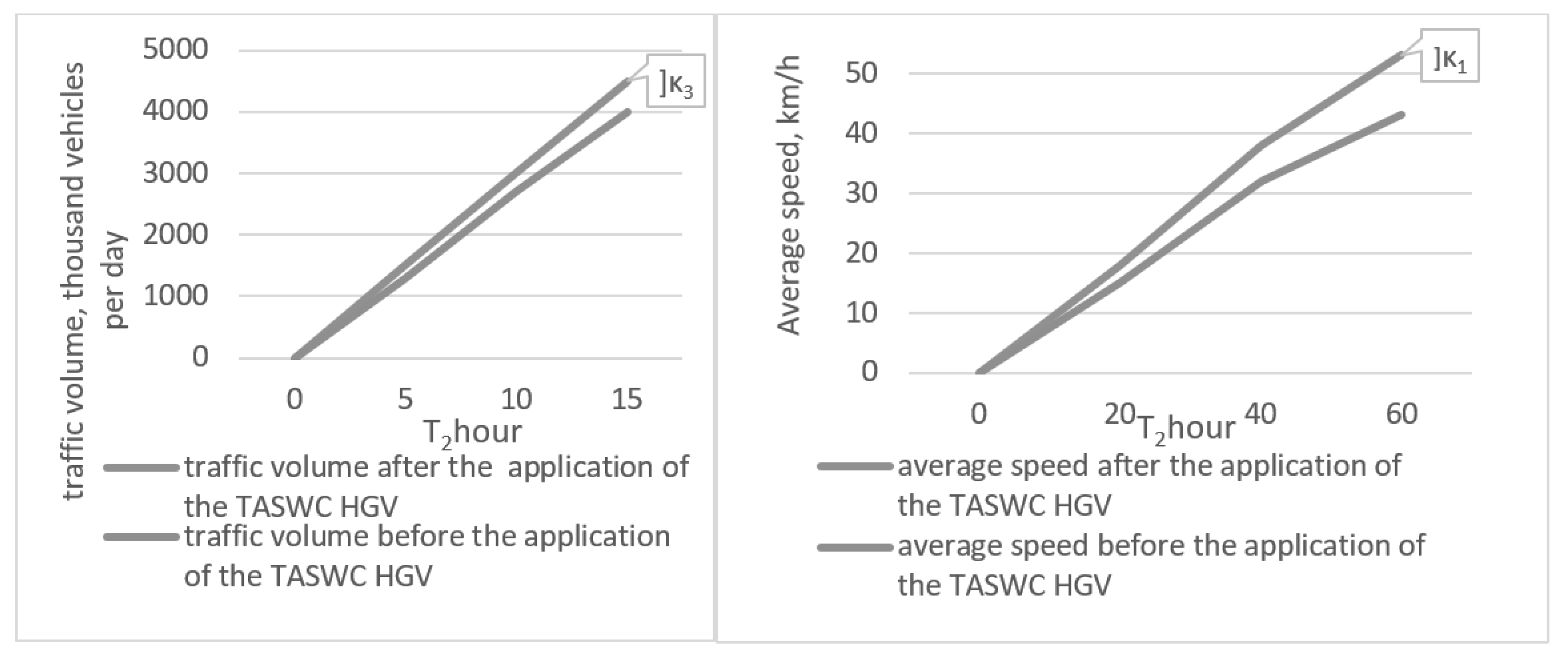
- Some kind of dependence has been established, in which the increase in performance indicators of the road, such as road capacity and average speed of traffic, increases the efficiency of road transport, by increasing the speed of execution of the control system functions. Consequently, the introduction of automated complexes of a telematic management system of weight control increases the efficiency of road transportation of heavy goods in general.
- Based on the mathematical modeling, the authors concluded that the most significant parameters affecting the efficiency of the road are the state of the road, the average speed of traffic, and the efficiency of management of heavy vehicles. The choice and evaluation of hardware and equipment for the TASWC HGV based on these parameters.
- A methodology of rational equipping of automatic points of weight control of heavy vehicles during transportation by automobile transport is established, which includes a certain algorithm of rational choice of means of weighing with the use of experimentally determined generalized criterion: the degree of efficiency of identification of weight parameters of automobile equipment (Pi).
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Drop, N.; Garlińska, D. Evaluation of Intelligent Transport Systems Used in Urban Agglomerations and Intercity Roads by Professional Truck Drivers. Sustainability 2021, 13, 2935. [Google Scholar] [CrossRef]
- Rudskoy, A.; Ilin, I.; Prokhorov, A. Digital Twins in the Intelligent Transport Systems. Transp. Res. Procedia 2021, 54, 927–935. [Google Scholar] [CrossRef]
- Sjoberg, K.; Andres, P.; Buburuzan, T.; Brakemeier, A. Cooperative intelligent transport systems in Europe: Current deployment status and outlook. IEEE Veh. Technol. Mag. 2017, 12, 89–97. [Google Scholar] [CrossRef]
- Bäumler, I.; Kotzab, H. Intelligent transport systems for road freight transport—An overview. In Dynamics in Logistics; Springer: Cham, Switzerland, 2017; pp. 279–290. [Google Scholar] [CrossRef]
- Abramovich, B.N.; Bogdanov, I.A. Improving the efficiency of autonomous electrical complexes of oil and gas enterprises. J. Min. Inst. 2021, 249, 408–416. [Google Scholar] [CrossRef]
- Alamandala, S.; Sai Prasad, R.L.N.; Pancharathi, P.K.; Pavan, V.D.R.; Kishore, P. Study on bridge weigh in motion (BWIM) system for measuring the vehicle parameters based on strain measurement using FBG sensors. Opt. Fiber Technol. 2021, 61, 102440. [Google Scholar] [CrossRef]
- Chatterjee, I.; Liao, C.-F.; Davisa, G.A. A statistical process control approach using cumulative sum control chart analysis for traffic data quality verification and sensor calibration for weigh-in-motion systems. J. Intell. Transp. Syst. 2017, 21, 111–122. [Google Scholar] [CrossRef]
- Safiullin, R.R.; Sivov, A.A. To the question of the formation of an adaptive system of weight and size control of vehicles during the delivery of goods. IZVESTIA MAAO 2020, 50, 35–38. [Google Scholar]
- Hou, R.; Jeong, S.; Lynch, J.P.; Ettouney, M.M.; Law, K.H. Data-driven analytical load rating method of bridges using integrated bridge structural response and weigh-in-motion truck data. Mech. Syst. Signal Process. 2021, 163, 108128. [Google Scholar] [CrossRef]
- Chen, S.-Z.; Wu, G.; Feng, D.-C. Development of a bridge weigh-in-motion method considering the presence of multiple vehicles. Eng. Struct. 2019, 191, 724–739. [Google Scholar] [CrossRef]
- Tahaei, N.; Yang, J.J.; Chorzepa, M.G.; Kim, S.S.; Durham, S.A. Machine learning of Truck Traffic Classification groups from Weigh-in-Motion data. Mach. Learn. Appl. 2021, 6, 100178. [Google Scholar] [CrossRef]
- Feng, M.Q.; Leung, R.Y.; Eckersley, C.M. Non-Contact vehicle Weigh-in-Motion using computer vision. Measurement 2020, 153, 107415. [Google Scholar] [CrossRef]
- Jacob, B.; Feypell-de La Beaumelle, V. Improving truck safety: Potential of weigh-in-motion technology. IATSS Res. 2010, 34, 9–15. [Google Scholar] [CrossRef] [Green Version]
- Alkhoori, F.A.; Maghelal, P.K. Regulating the overloading of heavy commercial Vehicles: Assessment of land transport operators in Abu Dhabi. Transp. Res. Part A Policy Pract. 2021, 154, 287–299. [Google Scholar] [CrossRef]
- Zhao, S.; Yang, J.; Tang, Z.; Li, Q.; Xing, Z. Methodological Study on the Influence of Truck Driving State on the Accuracy of Weigh-in-Motion System. MDPI Special Issue “Soft Computing in Intelligent Transportation System”. Information 2022, 13, 130. [Google Scholar] [CrossRef]
- Vasilyeva, N.V.; Boikov, A.V.; Erokhina, O.O.; Trifonov, A.Y. Automated digitization of radial charts. J. Min. Inst. 2021, 247, 82–87. [Google Scholar] [CrossRef]
- Aleksikov, S.V.; Rusanov, M.I.; Fomenko, N.A.; Boldin, A.I.; Leskin, A.I. Ensuring the safety of regional roads through the introduction of weight control. Bull. VGASU 2018, 53, 66–71. [Google Scholar]
- Loktionova, T.S.; Gorelykh, D.S.; Novikov, I.A. Main types of violations of equipment of weight control posts: The collection of the conference Organization and Safety of Road Traffic. In Proceedings of the Materials of the XII National Scientific and Practical Conference with International Participation, Tyumen, Russia, 14 March 2019; pp. 274–276. [Google Scholar]
- Gatta, V.; Marcucci, E.; Le Pira, M. Smart urban freight planning process: Integrating desk, living lab and modelling approaches in decision-making. Eur. Transp. Res. Rev. 2017, 9, 32. [Google Scholar] [CrossRef] [Green Version]
- Semykina, I.Y.; Kipervasser, M.V.; Gerasimuk, A.V. Study of drive currents for lifting bridge cranes of metallurgical enterprises for early diagnosis of load excess weight. J. Min. Inst. 2021, 247, 1–10. [Google Scholar] [CrossRef]
- Comi, A.; Schiraldi, M.M.; Buttarazzi, B. Smart urban freight transport: Tools for planning and optimising delivery operations. Simul. Model. Pract. Theory 2018, 88, 48–61. [Google Scholar] [CrossRef]
- Saleh, H.M.; Nuzhdin, R.V.; Kurochkin, S.V. Application of systems of telematics on commercial vehicles//IOP Conference Series: Materials Science and Engineering. IOP Publ. 2019, 695, 012014. [Google Scholar] [CrossRef]
- Afanasyev, A.S.; Egoshin, A.M.; Alekseev, S.V. The choice substantiation method of road construction equipment for mining enterprises Journal of Physics: Conference Series Krasnoyarsk Science and Technology City Hall of the Russian Union of Scientific and Engineering Associations. J. Phys. Conf. Ser. 2019, 1399, 033021. [Google Scholar] [CrossRef] [Green Version]
- Kerimov, M.; Marusin, A.; Marusin, A.; Danilov, I. Methodological aspects of building mathematical model to evaluate efficiency of automated vehicle traffic control systems. Transp. Res. Procedia 2020, 50, 253–261. [Google Scholar] [CrossRef]
- Afanasyev, A.S.; Chudakova, N.V. Refinement of the parameters of the braking process of vehicles of category M1 in the operating conditions of the North-West region. World Transp. Technol. Mach. 2019, 67, 88–94. [Google Scholar]
- Zenov, V.V.; Starikov, A.V. Functional structure and features of building an automated system of dynamic weight and dimensional control of trucks. Actual directions of scientific research of the 21st century: Theory Pract. 2018, 41, 29–33. [Google Scholar]
- Alexandrov, V.I.; Vasileva, M.A.; Koptev, V.Y. Effective Power and Speed of Mining Dump Trucks in Fuel Economy Mode. J. Min. Inst. 2019, 239, 556. [Google Scholar] [CrossRef]
- Safiullin, R.N.; Belikova, D.D.; Morozov, E.V. System of automatic identification of vehicles using a matrix QR code. Bull. Civ. Eng. 2020, 2, 195–201. [Google Scholar] [CrossRef]
- Afanasyev, A.S.; Egoshin, A.M.; Alekseev, S.V. Simulation model of the organization of technologicaltransport movement at a mining enterprise. J. Phys. Conf. Ser. 2021, 1753, 012008. [Google Scholar] [CrossRef]
- Kozyaruk, A.E.; Kamyshyan, A.M. Improving the Energy Efficiency of the Electromechanical Transmission of an Open-pit Dump Truck. J. Min. Inst. 2019, 239, 576. [Google Scholar] [CrossRef]
- Kondrasheva, N.K.; Rudko, V.A.; Nazarenko, M.Y.; Gabdulkhakov, R.R. Effect of parameters of delayed coking of asphalt on the yield and quality of liquid and solid products. J. Min. Inst. 2020, 241, 97. [Google Scholar] [CrossRef]
- Belov, A.V. Problems of organization and management of road traffic in the emergence of unmanned cars. Sci. Technol. Road Sect. 2017, 81, 29. [Google Scholar]
- Safiullin, R.N.; Afanasyev, A.S.; Reznichenko, V.V. The concept of development of monitoring systems and management of intelligent technical complexes. J. Min. Inst. 2019, 237, 322–330. [Google Scholar] [CrossRef]
- Semin, M.A.; Grishin, E.L.; Levin, L.Y.; Zaitsev, A.V. Automated ventilation control in mines. Challenges, state of the art, areas for improvement. J. Min. Inst. 2020, 246, 623–632. [Google Scholar] [CrossRef]
- Urazakov, K.R.; Molchanova, V.A.; Tugunov, P.M. Method for calculating dynamic loads and energy consumption of a sucker rod installation with an automatic balancing system. J. Min. Inst. 2020, 246, 640–649. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | 2019 | 2020 | January–September 2021 | In % to January–September 2020 | Unit of Measurement | |
|---|---|---|---|---|---|---|
| 1 | Cargo transportation in Russia | 5735 | 5405 | 3986 | 98.7 | mtn |
| 2 | Length of roads | 1706 | 1717 | - | - | thou. km |
| 3 | Road accidents involving HGV | 10.8 | 9.6 | 6.6 | 61 | thousand cases |
| Transport and Operational Road Parameters | Motor Road | |||
|---|---|---|---|---|
| Normative Indicators | Values of Transport and Operational Indicators of the a/Road after the Application of TASWC HGV | Efficiency of Application of TASWC HGV, % | ||
| 1 | Average speed of traffic on the road, km/h | 40 | 50.8 | 25% (+10.8 km/h) |
| 2 | Traffic volume, 4.5 thousand cars/day | 4.5 | 5.1563 | 15% (+0.6563 thousand. cars/day) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Belikova, D.D.; Safiullin, R.N. The Design and Evaluation of a Telematic Automated System of Weight Control for Heavy Vehicles. Infrastructures 2022, 7, 86. https://doi.org/10.3390/infrastructures7070086
Belikova DD, Safiullin RN. The Design and Evaluation of a Telematic Automated System of Weight Control for Heavy Vehicles. Infrastructures. 2022; 7(7):86. https://doi.org/10.3390/infrastructures7070086
Chicago/Turabian StyleBelikova, Daria Dmitrievna, and Ravil Nurullovich Safiullin. 2022. "The Design and Evaluation of a Telematic Automated System of Weight Control for Heavy Vehicles" Infrastructures 7, no. 7: 86. https://doi.org/10.3390/infrastructures7070086
APA StyleBelikova, D. D., & Safiullin, R. N. (2022). The Design and Evaluation of a Telematic Automated System of Weight Control for Heavy Vehicles. Infrastructures, 7(7), 86. https://doi.org/10.3390/infrastructures7070086