
Deep-Learning-Based Drive-by Damage Detection System for Railway Bridges


Abstract
:1. Introduction
2. Description of the Damage Detection System
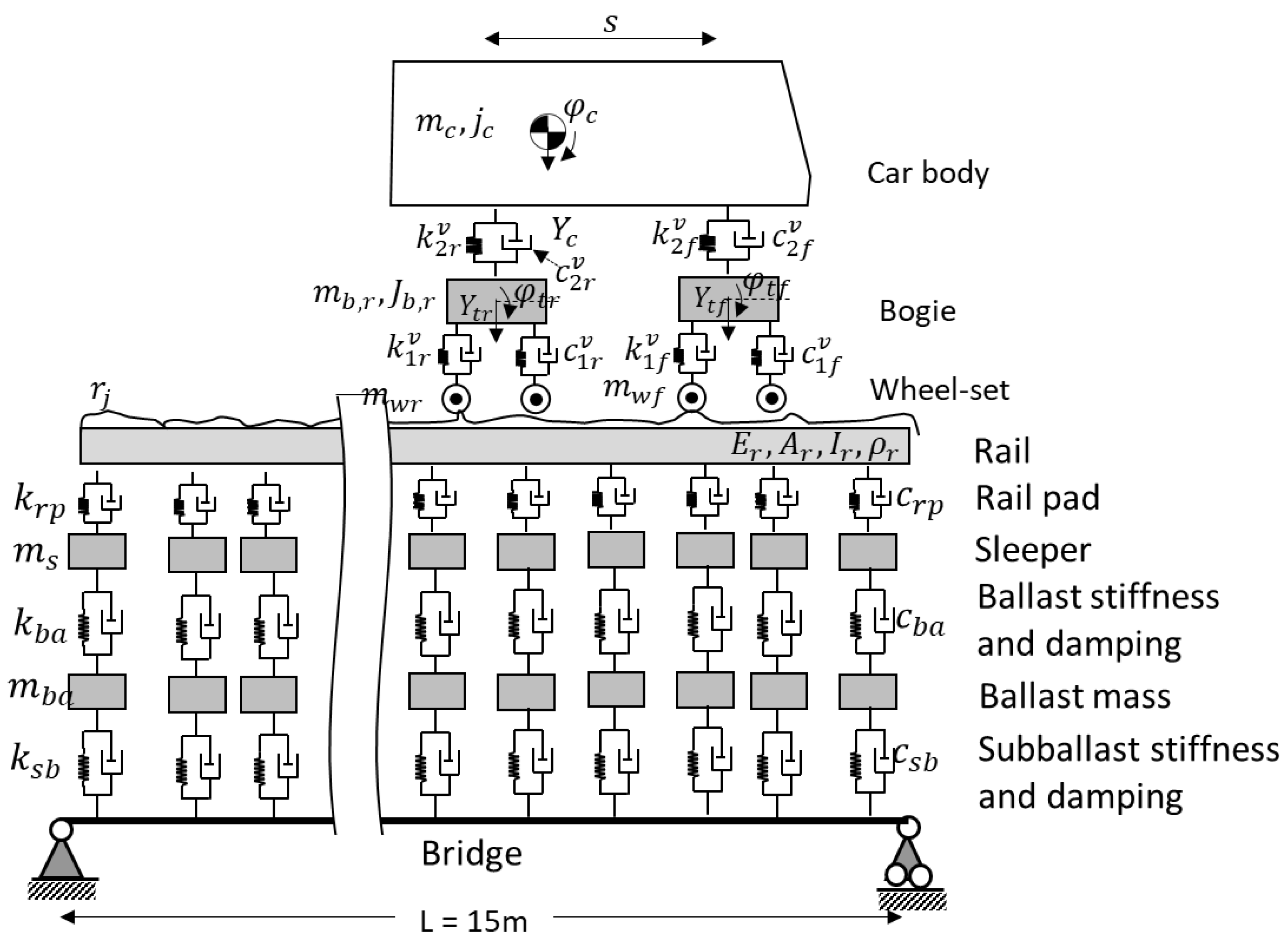
2.1. TTB Numerical Model
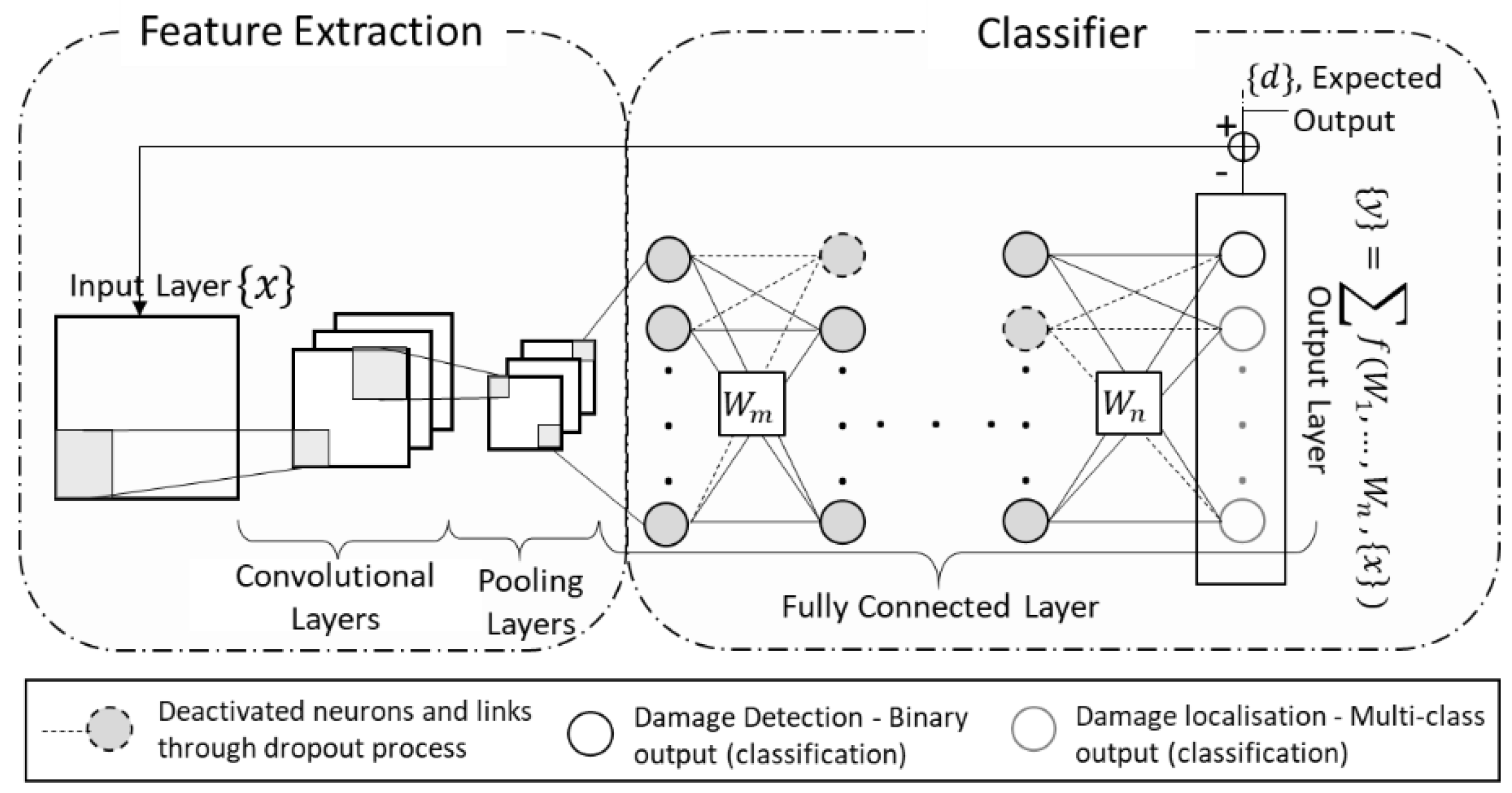
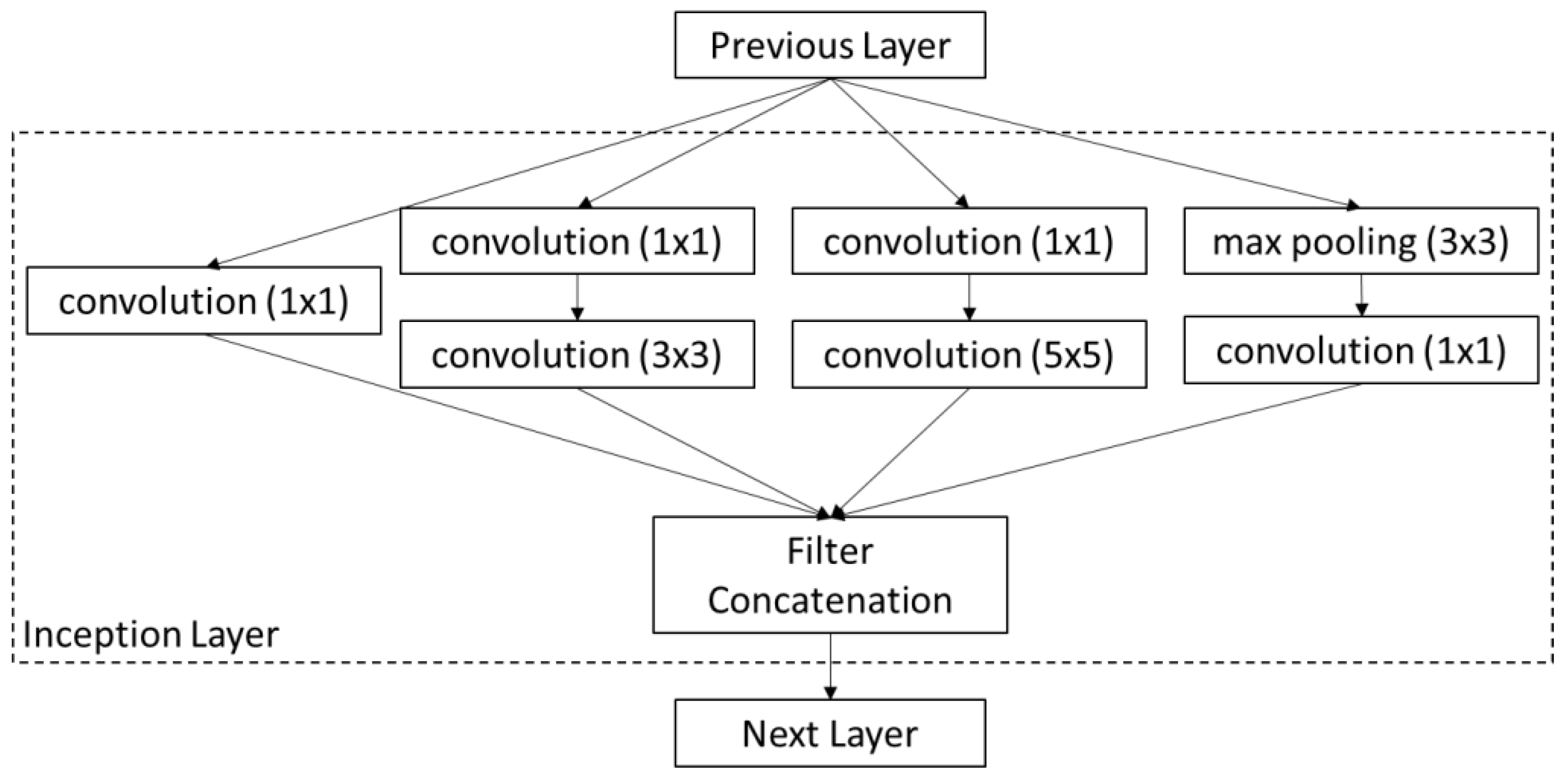
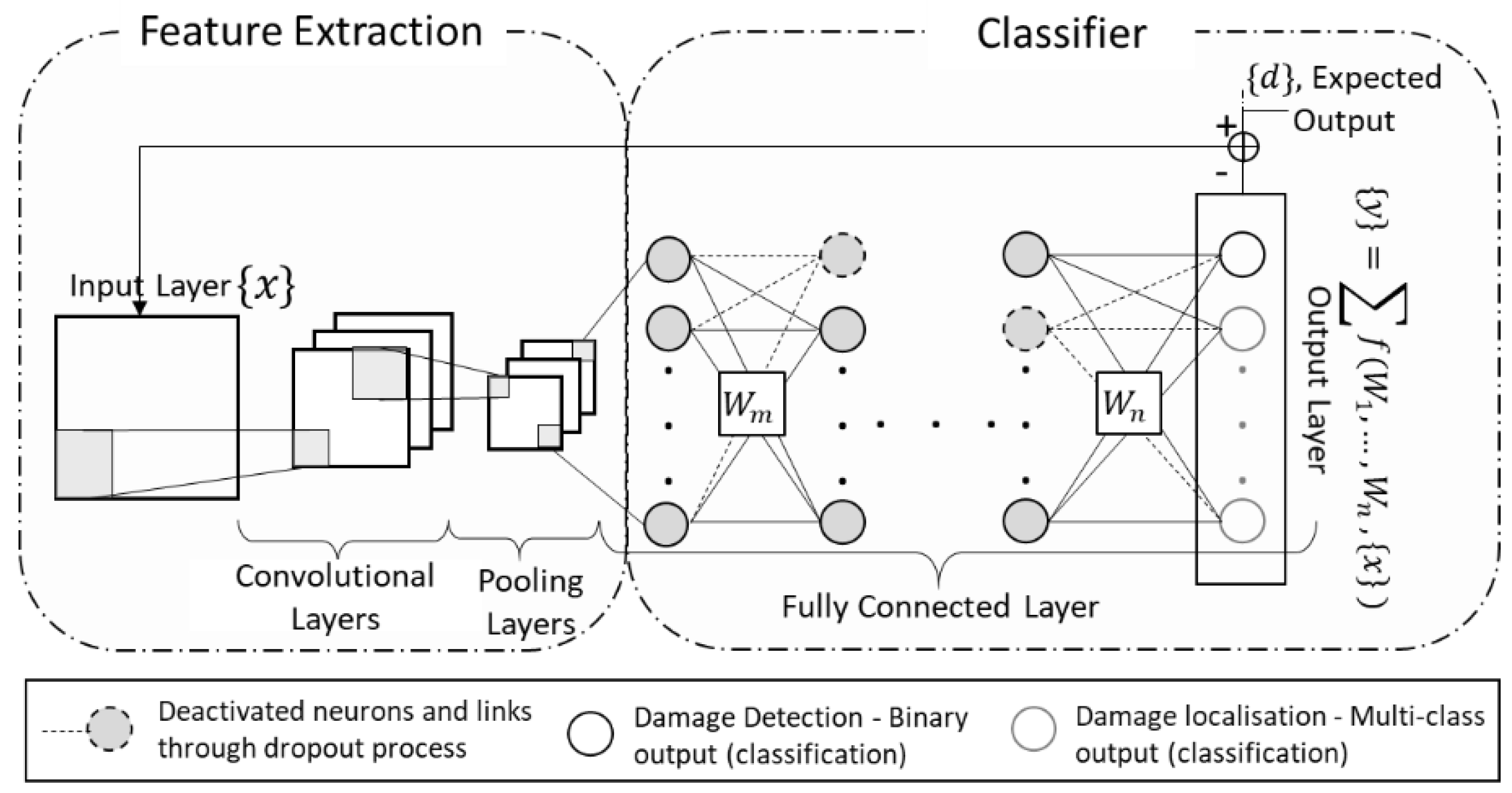
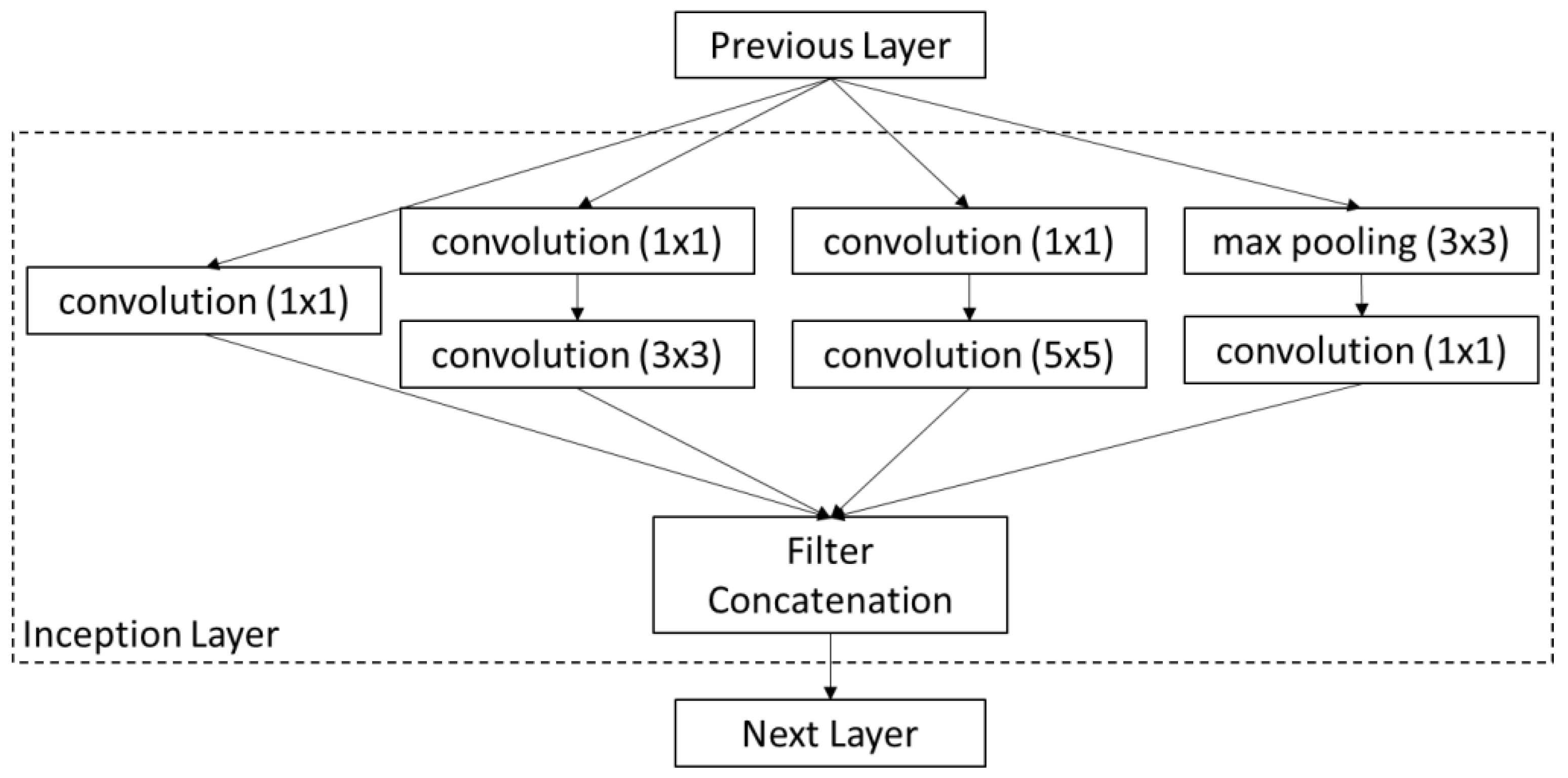
2.2. Deep Leaning Architecture
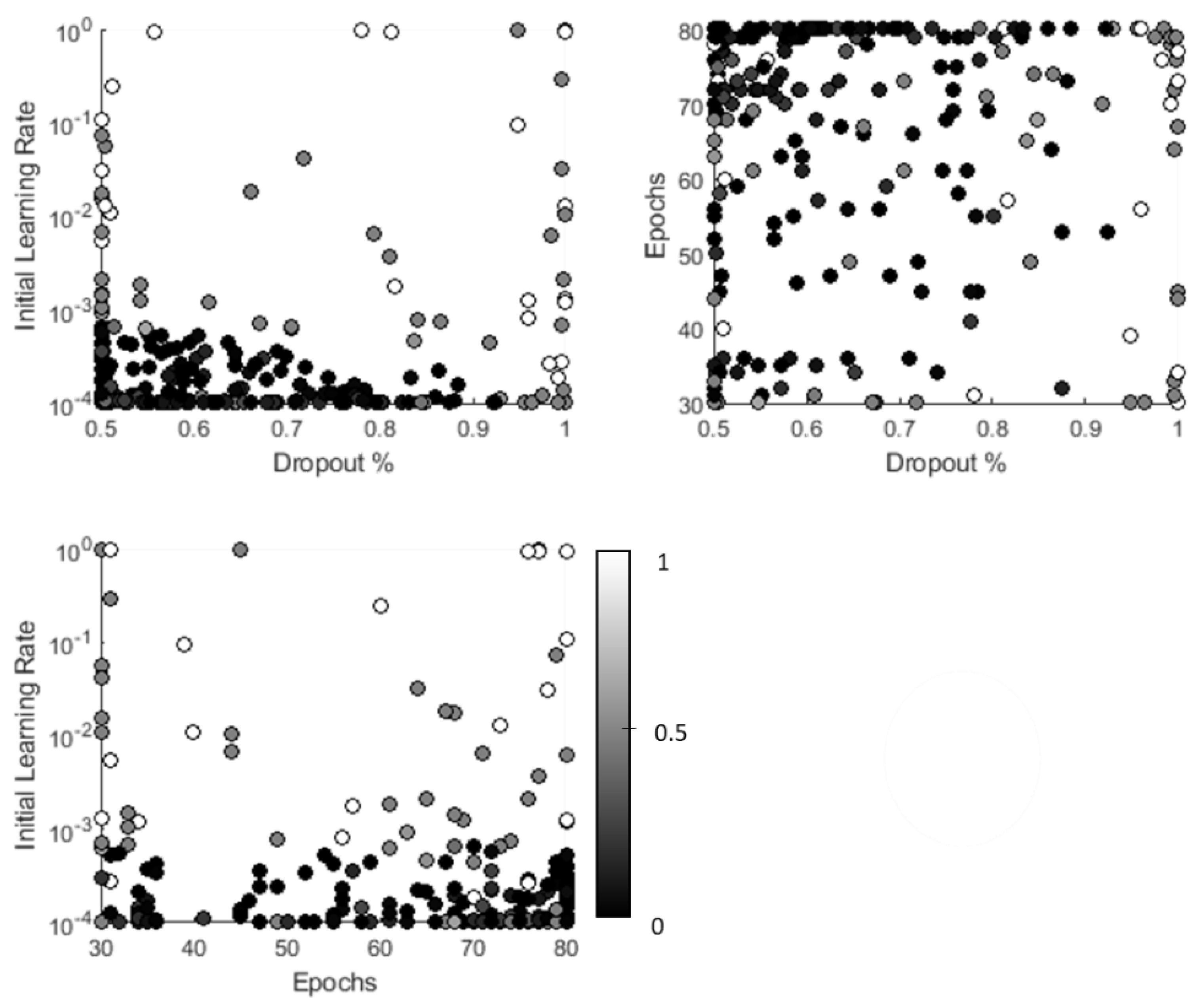
2.3. Bayesian Optimisation
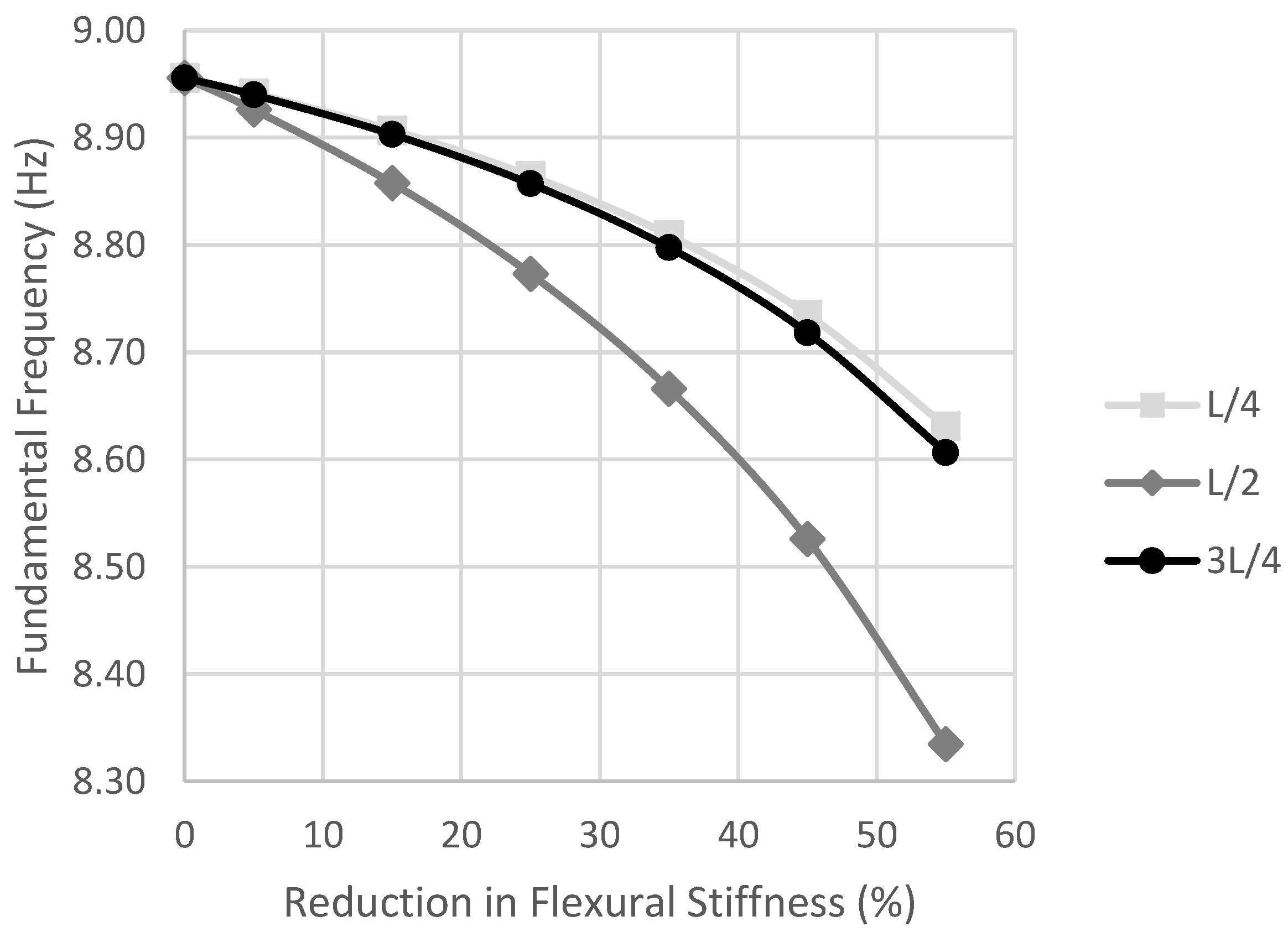
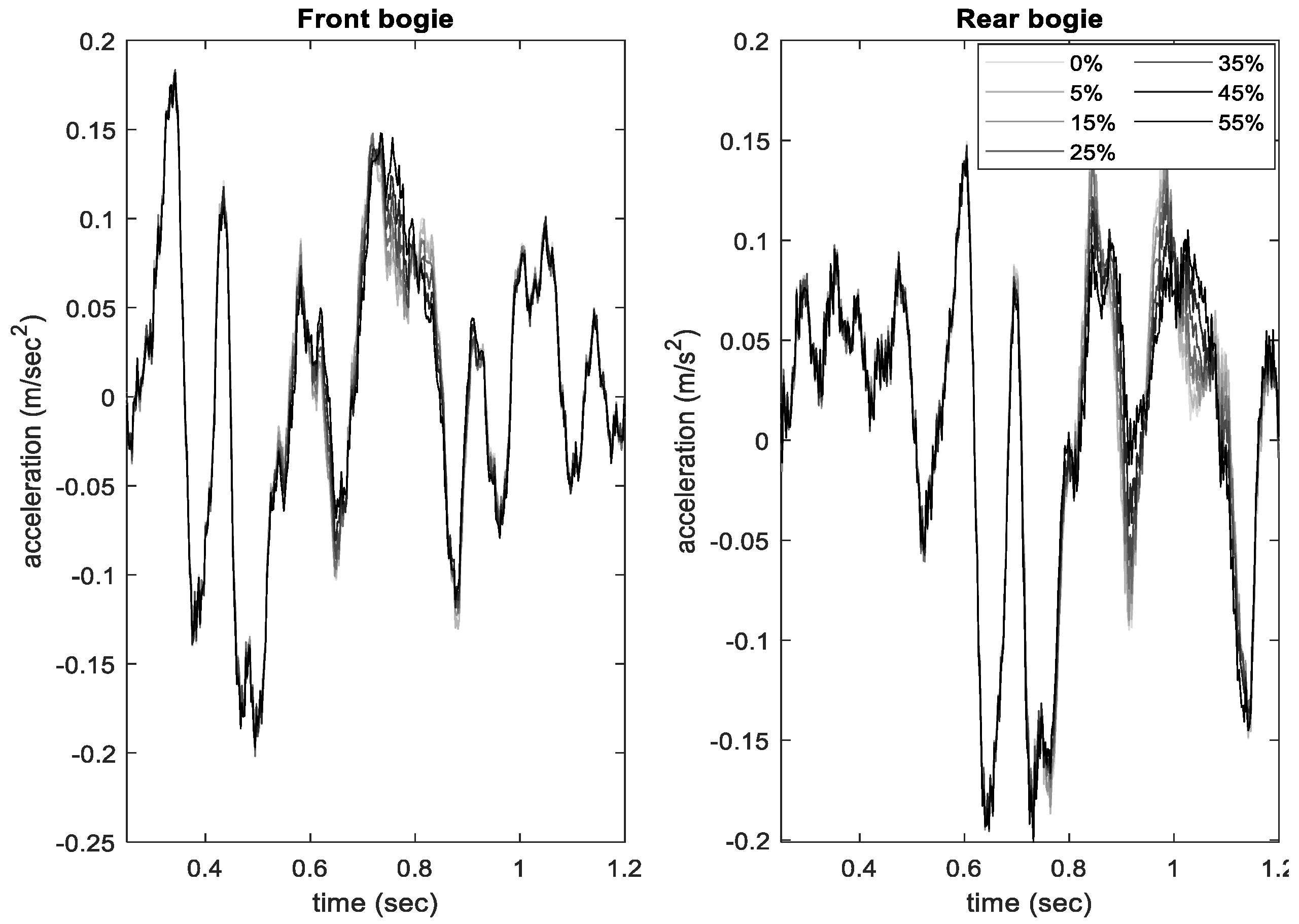
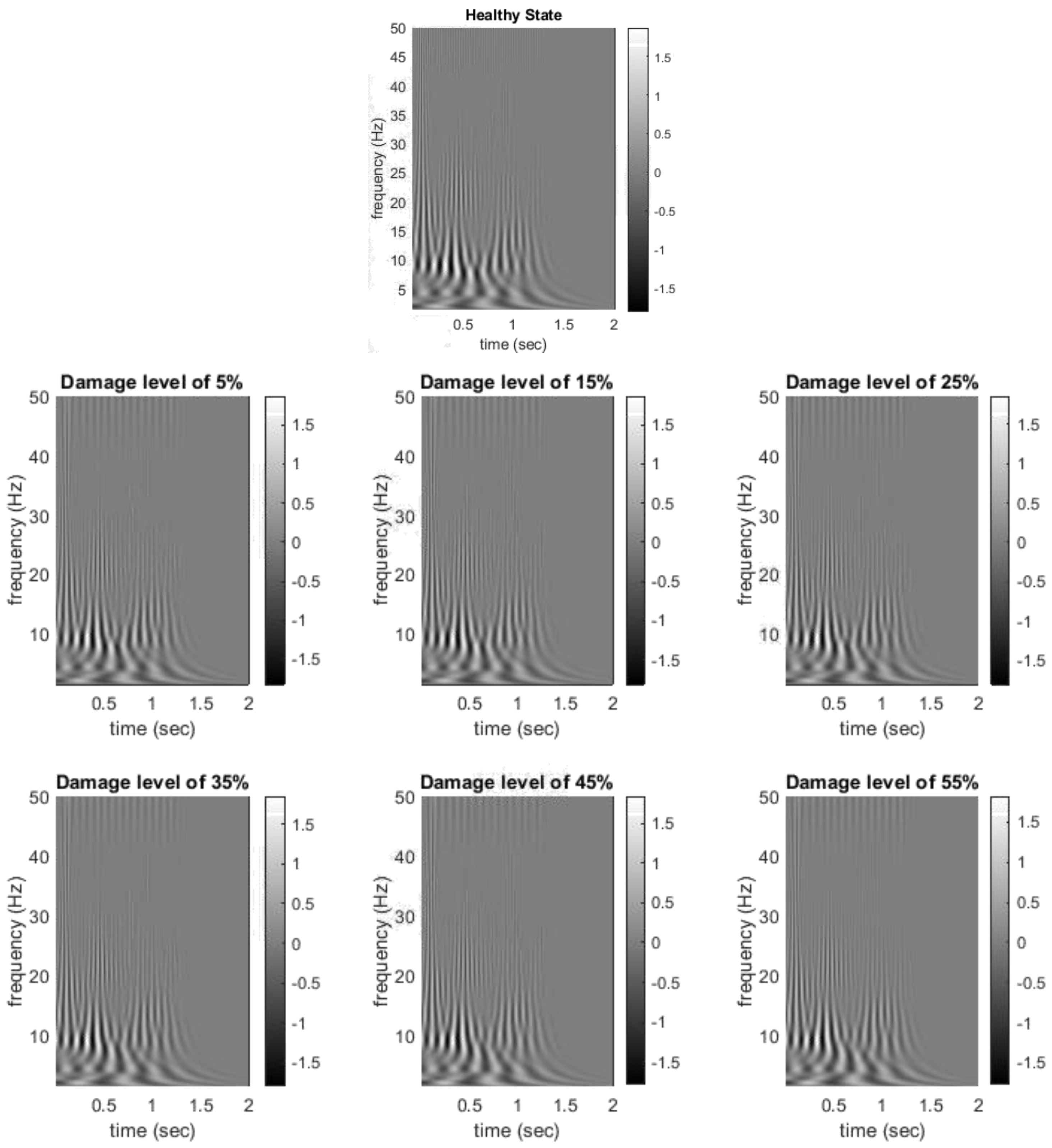
3. Results
Recommendations for Future Work
4. Conclusions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hajializadeh, D.; OBrien, E.J.; O’Connor, A.J. Virtual Structural Health Monitoring and Remaining Life Prediction of Steel Bridges. Can. J. Civ. Eng. 2017, 44, 264–273. [Google Scholar] [CrossRef] [Green Version]
- HekmatiAthar, S.; Taheri, M.; Secrist, J.; Taheri, H. Neural Network for Structural Health Monitoring with Combined Direct and Indirect Methods. J. Appl. Remote Sens. 2020, 14, 014511. [Google Scholar] [CrossRef]
- Ni, Y.Q.; Ye, X.W.; Ko, J.M. Monitoring-Based Fatigue Reliability Assessment of Steel Bridges: Analytical Model and Application. J. Struct. Eng. 2010, 136, 1563–1573. [Google Scholar] [CrossRef]
- Yang, Y.B.; Yau, J.D.; Yao, Z.; Wu, Y.S. Vehicle-Bridge Interaction Dynamics: With Applications to High-Speed Railways; World Scientific: Singapore, 2004. [Google Scholar]
- Lin, C.W.; Yang, Y.B. Use of a Passing Vehicle to Scan the Fundamental Bridge Frequencies: An Experimental Verification. Eng. Struct. 2005, 27, 1865–1878. [Google Scholar] [CrossRef]
- Yang, Y.B.; Chang, K.C. Extraction of Bridge Frequencies from the Dynamic Response of a Passing Vehicle Enhanced by the EMD Technique. J. Sound Vib. 2009, 322, 718–739. [Google Scholar] [CrossRef]
- Oshima, Y.; Yamaguchi, T.; Kobayashi, Y.; Sugiura, K. Eigenfrequency Estimation for Bridges Using the Response of a Passing Vehicle with Excitation System. In Proceedings of the Fourth International Conference on Bridge Maintenance, Safety and Management, Seoul, Korea, 13–17 July 2008; pp. 3030–3037. [Google Scholar]
- Yang, Y.B.; Yang, J.P. State-of-the-Art Review on Modal Identification and Damage Detection of Bridges by Moving Test Vehicles. Int. J. Struct. Stab. Dyn. 2018, 18, 1850025. [Google Scholar] [CrossRef]
- Malekjafarian, A.; McGetrick, P.J.; OBrien, E.J. A Review of Indirect Bridge Monitoring Using Passing Vehicles. Shock Vib. 2015, 2015, 286139. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.B.; Li, Y.C.; Chang, K.C. Using Two Connected Vehicles to Measure the Frequencies of Bridges with Rough Surface: A Theoretical Study. Acta Mech. 2012, 223, 1851–1861. [Google Scholar] [CrossRef]
- McGetrick, P.J.; Gonzlez, A.; OBrien, E.J. Theoretical Investigation of the Use of a Moving Vehicle to Identify Bridge Dynamic Parameters. Insight-Non-Destr. Test. Cond. Monit. 2009, 51, 433–438. [Google Scholar] [CrossRef] [Green Version]
- Yang, J.; Lam, H.F.; Hu, J. Ambient Vibration Test, Modal Identification and Structural Model Updating Following Bayesian Framework. Int. J. Struct. Stab. Dyn. 2015, 15, 1540024. [Google Scholar] [CrossRef]
- McGetrick, P.J.; Kim, C.W. An Indirect Bridge Inspection Method Incorporating a Wavelet-Based Damage Indicator and Pattern Recognition. In Proceedings of the International Conference on Structural Dynamics EURODYN 2014, Porto, Portugal, 30 June 2014. [Google Scholar]
- Hester, D.; González, A. A Bridge-Monitoring Tool Based on Bridge and Vehicle Accelerations. Struct. Infrastruct. Eng. 2015, 11, 619–637. [Google Scholar] [CrossRef] [Green Version]
- Fitzgerald, P.C.; Malekjafarian, A.; Cantero, D.; OBrien, E.J.; Prendergast, L.J. Drive-by Scour Monitoring of Railway Bridges Using a Wavelet-Based Approach. Eng. Struct. 2019, 191, 1–11. [Google Scholar] [CrossRef]
- Locke, W.; Sybrandt, J.; Redmond, L.; Safro, I.; Atamturktur, S. Using Drive-by Health Monitoring to Detect Bridge Damage Considering Environmental and Operational Effects. J. Sound Vib. 2020, 468, 115088. [Google Scholar] [CrossRef]
- Worden, K.; Manson, G.; Allman, D. Experimental Validation of a Structural Health Monitoring Methodology: Part I. Novelty Detection on a Laboratory Structure. J. Sound Vib. 2003, 259, 323–343. [Google Scholar] [CrossRef]
- Farrar, C.R.; Worden, K. Structural Health Monitoring: A Machine Learning Perspective, 1st ed.; John Wiley & Sons: Chichester, UK, 2013; ISBN 9781119994336. [Google Scholar]
- Bull, L.; Worden, K.; Manson, G.; Dervilis, N. Active Learning for Semi-Supervised Structural Health Monitoring. J. Sound Vib. 2018, 437, 373–388. [Google Scholar] [CrossRef]
- Deraemaeker, A.; Worden, K. A Comparison of Linear Approaches to Filter out Environmental Effects in Structural Health Monitoring. Mech. Syst. Signal Process. 2018, 105, 1–15. [Google Scholar] [CrossRef]
- Liu, Y.Y.; Ju, Y.F.; Duan, C.D.; Zhao, X.F. Structure Damage Diagnosis Using Neural Network and Feature Fusion. Eng. Appl. Artif. Intell. 2011, 24, 87–92. [Google Scholar] [CrossRef]
- Zhu, L.; Malekjafarian, A. On the Use of Ensemble Empirical Mode Decomposition for the Identification of Bridge Frequency from the Responses Measured in a Passing Vehicle. Infrastructures 2019, 4, 32. [Google Scholar] [CrossRef] [Green Version]
- Antoniadou, I.; Cross, E.J.; Worden, K. Cointegration and the Empirical Mode Decomposition for the Analysis of Diagnostic Data. Key Eng. Mater. 2013, 569–570, 884–891. [Google Scholar] [CrossRef]
- OBrien, E.J.; Malekjafarian, A.; González, A. Application of Empirical Mode Decomposition to Drive-by Bridge Damage Detection. Eur. J. Mech. A/Solids 2017, 61, 151–163. [Google Scholar] [CrossRef] [Green Version]
- Zhang, T.; Biswal, S.; Wang, Y. SHMnet: Condition Assessment of Bolted Connection with beyond Human-Level Performance. Struct. Health Monit. 2019, 19, 1188–1201. [Google Scholar] [CrossRef]
- Chun, P.J.; Yamashita, H.; Furukawa, S. Bridge Damage Severity Quantification Using Multipoint Acceleration Measurement and Artificial Neural Networks. Shock Vib. 2015, 789384. [Google Scholar] [CrossRef] [Green Version]
- Dackermann, U.; Li, J.; Samali, B. Dynamic-Based Damage Identification Using Neural Network Ensembles and Damage Index Method. Adv. Struct. Eng. 2010, 13, 1001–1016. [Google Scholar] [CrossRef] [Green Version]
- Neves, A.C.; González, I.; Leander, J.; Karoumi, R. Structural Health Monitoring of Bridges: A Model-Free ANN-Based Approach to Damage Detection. J. Civ. Struct. Health Monit. 2017, 7, 689–702. [Google Scholar] [CrossRef] [Green Version]
- Hakim, S.J.S.; Abdul Razak, H. Modal Parameters Based Structural Damage Detection Using Artificial Neural Networks—A Review. Smart Struct. Syst. 2014, 14, 159–189. [Google Scholar] [CrossRef] [Green Version]
- Mrugalska, B. Towards Enhanced Performance of Neural-Network-Based Fault Detection Using an Sequential D-Optimum Experimental Design. Appl. Sci. 2018, 8, 1290. [Google Scholar] [CrossRef] [Green Version]
- Hakim, S.J.S.; Abdul Razak, H. Adaptive Neuro Fuzzy Inference System (ANFIS) and Artificial Neural Networks (ANNs) for Structural Damage Identification. Struct. Eng. Mech. 2013, 45, 779–802. [Google Scholar] [CrossRef] [Green Version]
- Kim, P. MATLAB Deep Learning; Apress: Seoul, Korea, 2017; ISBN 9781484228449. [Google Scholar]
- Tang, Z.; Chen, Z.; Bao, Y.; Li, H. Convolutional Neural Network-Based Data Anomaly Detection Method Using Multiple Information for Structural Health Monitoring. Struct. Control Health Monit. 2019, 26, 1–22. [Google Scholar] [CrossRef] [Green Version]
- Cha, Y.J.; Choi, W.; Büyüköztürk, O. Deep Learning-Based Crack Damage Detection Using Convolutional Neural Networks. Comput. Civ. Infrastruct. Eng. 2017, 32, 361–378. [Google Scholar] [CrossRef]
- Mohtasham Khani, M.; Vahidnia, S.; Ghasemzadeh, L.; Ozturk, Y.E.; Yuvalaklioglu, M.; Akin, S.; Ure, N.K. Deep-Learning-Based Crack Detection with Applications for the Structural Health Monitoring of Gas Turbines. Struct. Health Monit. 2020, 19, 1440–1452. [Google Scholar] [CrossRef]
- Tong, Z.; Gao, J.; Zhang, H. Recognition, Location, Measurement, and 3D Reconstruction of Concealed Cracks Using Convolutional Neural Networks. Constr. Build. Mater. 2017, 146, 775–787. [Google Scholar] [CrossRef]
- Kim, B.; Cho, S. Image-Based Concrete Crack Assessment Using Mask and Region-Based Convolutional Neural Network. Struct. Control Health Monit. 2019, 26, e2381. [Google Scholar] [CrossRef]
- Nex, F.; Duarte, D.; Tonolo, F.G.; Kerle, N. Structural Building Damage Detection with Deep Learning: Assessment of a State-of-the-Art CNN in Operational Conditions. Remote Sens. 2019, 11, 2765. [Google Scholar] [CrossRef] [Green Version]
- Sony, S.; Gamage, S.; Sadhu, A.; Samarabandu, J. Multiclass Damage Identification in a Full-Scale Bridge Using Optimally Tuned One-Dimensional Convolutional Neural Network. J. Comput. Civ. Eng. 2022, 36, 4021035. [Google Scholar] [CrossRef]
- Khodabandehlou, H.; Pekcan, G.; Fadali, M.S. Vibration-Based Structural Condition Assessment Using Convolution Neural Networks. Struct. Control Health Monit. 2019, 26, e2308. [Google Scholar] [CrossRef]
- Yu, Y.; Wang, C.; Gu, X.; Li, J. A Novel Deep Learning-Based Method for Damage Identification of Smart Building Structures. Struct. Health Monit. 2019, 18, 143–163. [Google Scholar] [CrossRef] [Green Version]
- Ferrara, R. A Numerical Model to Predict Train Induced Vibrations and Dynamic Overloads. Ph.D. Thesis, University of Reggio Calabria, Reggio Calabria, Italy, University Montpellier 2, Montpellier, France, 2014. [Google Scholar]
- Zhang, B.; Qian, Y.; Wu, Y.; Yang, Y.B. An Effective Means for Damage Detection of Bridges Using the Contact-Point Response of a Moving Test Vehicle. J. Sound Vib. 2018, 419, 158–172. [Google Scholar] [CrossRef]
- Cantero, D.; Arvidsson, T.; OBrien, E.; Karoumi, R. Train–Track–Bridge Modelling and Review of Parameters. Struct. Infrastruct. Eng. 2016, 12, 1051–1064. [Google Scholar] [CrossRef]
- Fryba, L. Dynamics of Railway Bridges; Thomas Telford: London, UK, 1996. [Google Scholar]
- Hamid, A.; Rasmussen, K.; Baluja, M.; Yang, T.L. Analytical Descriptions of Track Geometry Variations; Federal Railroad Adminitration: Washington, DC, USA, 1983.
- Martino, D. Train-Bridge Interaction on Freight Railway Lines. MSc Thesis; KTH Royal Institute of Technology: Stockholm, Sweden, 2011. [Google Scholar]
- Lei, X.; Zhang, B. Influence of Track Stiffness Distribution on Vehicle and Track Interactions in Track Transition. Proc. Inst. Mech. Eng. 2010, 224, 592–604. [Google Scholar] [CrossRef]
- Lou, P. Finite Element Analysis for Train-Track-Bridge Interaction System. Arch. Appl. Mech. 2007, 77, 707–728. [Google Scholar] [CrossRef]
- Dinh, V.N.; Du Kim, K.; Warnitchai, P. Dynamic Analysis of Three-Dimensional Bridge-High-Speed Train Interactions Using a Wheel-Rail Contact Model. Eng. Struct. 2009, 31, 3090–3106. [Google Scholar] [CrossRef]
- Lilly, J.M.; Olhede, S.C. Higher-Order Properties of Analytic Wavelets. IEEE Trans. Signal Process. 2009, 57, 146–160. [Google Scholar] [CrossRef] [Green Version]
- Medhi, M.; Dandautiya, A.; Raheja, J.L. Real-Time Video Surveillance Based Structural Health Monitoring of Civil Structures Using Artificial Neural Network. J. Nondestruct. Eval. 2019, 38, 1–16. [Google Scholar] [CrossRef]
- Szegedy, C.; Liu, W.; Jia, Y.; Sermanet, P.; Reed, S. Going Deeper with Convolutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7 June 2015; pp. 1–9. [Google Scholar]
- Lin, M.; Chen, Q.; Yan, S. Network in Network. arXiv 2013, arXiv:1312.4400. [Google Scholar]
- Arora, S.; Bhaskara, A.; Ge, R.; Ma, T. Provable Bounds for Learning Some Deep Representations. In Proceedings of the 31st International Conference on Machine Learning (ICML 2014), Beijing, China, 21 June 2014; Volume 1, pp. 883–891. [Google Scholar]
- Snoek, J.; Larochelle, H.; Adams, R.P. Practical Bayesian Optimization of Machine Learning Algorithms. Adv. Neural Inf. Process. Syst. 2012, 25, 2951–2959. [Google Scholar] [CrossRef]
- Wan, H.-P.; Ni, Y.-Q. A New Approach for Interval Dynamic Analysis of Train-Bridge System Based on Bayesian Optimization. J. Eng. Mech. 2020, 146, 04020029. [Google Scholar] [CrossRef]
- Rasmussen, C.E.; Williams, C.K.I. Gaussian Processes for Machine Learning; MIT Press: Cambridge, MA, USA, 2006. [Google Scholar]
- Selvaraju, R.R.; Cogswell, M.; Das, A.; Vedantam, R.; Parikh, D.; Batra, D. Grad-Cam: Visual Explanations from Deep Networks via Gradient-Based Localization. In Proceedings of the IEEE International Conference on Computer Vision 2017, Venice, Italy, 22–29 October 2017; Volume 17, pp. 618–626. [Google Scholar]
- Maaten, L.V.D.; Hinton, G. Visualizing Data Using T-SNE. J. Mach. Learn. Res. 2008, 9, 2579–2605. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vehicle Properties [47] | Track Properties [48] | ||||
|---|---|---|---|---|---|
| Parameter | Symbol | Value | Parameter | Symbol | Value |
| Carriage body mass (kg) | 61,560 | Rail Young’s modulus (N/m2) | 206 × 109 | ||
| Carriage body moment of inertia (kg·m2) | 9.11 × 106 | Rail cross-sectional area (m2) | 15.38 | ||
| Bogie mass (kg) | 5200 | Rail second moment of area (m4) | 6.43 × 10−5 | ||
| Bogie moment of inertia (kg·m2) | 5900 | Rail mass per unit length (kg/m) | 120 | ||
| Wheelset mass (kg) | 1510 | Rail pad stiffness (N/m) | 80 × 106 | ||
| Primary suspension stiffness (N/m) | 4.96 × 106 | Rail pad damping (N.s/m) | 60 × 103 | ||
| Secondary suspension stiffness (N/m) | 1.9 × 106 | Mass of sleeper (kg) | 340 | ||
| Primary suspension damping (kN·s/m) | 108 | Sleeper spacing (m) | 0.57 | ||
| Secondary suspension damping (kN·s/m) | 152 | Ballast stiffness (N/m) | 120 × 106 | ||
| Distance between axles (m) | 2.7 | Ballast damping (N·s/m) | 60 × 103 | ||
| Horizontal distance between centre of mass of main body and bogie (m) | 3.81 | Ballast mass | 2718 | ||
| Sub-ballast stiffness (N/m) | 60 × 106 | ||||
| Sub-ballast damping (N/m) | 90 × 103 | ||||
| Type |
|---|
| convolution layer 7 × 7 and stride [2,2] |
| max pool layer 3 × 3 and stride [2,2] |
| convolution layer 3 × 3 and stride [1,1] |
| max pool layer 3 × 3 and stride [2,2] |
| inception (3a) |
| inception (2b) |
| max pool layer 3 × 3 and stride [2,2] |
| inception (4a) |
| inception (4b) |
| inception (4c) |
| inception (4d) |
| inception (4e) |
| max pool layer 3 × 3 and stride [2,2] |
| inception (5a) |
| inception (5b) |
| average pool layer 7 × 7 and stride [1,1] |
| dropout layer with probability of 55% |
| fully connected layer |
| softmax |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hajializadeh, D. Deep-Learning-Based Drive-by Damage Detection System for Railway Bridges. Infrastructures 2022, 7, 84. https://doi.org/10.3390/infrastructures7060084
Hajializadeh D. Deep-Learning-Based Drive-by Damage Detection System for Railway Bridges. Infrastructures. 2022; 7(6):84. https://doi.org/10.3390/infrastructures7060084
Chicago/Turabian StyleHajializadeh, Donya. 2022. "Deep-Learning-Based Drive-by Damage Detection System for Railway Bridges" Infrastructures 7, no. 6: 84. https://doi.org/10.3390/infrastructures7060084
APA StyleHajializadeh, D. (2022). Deep-Learning-Based Drive-by Damage Detection System for Railway Bridges. Infrastructures, 7(6), 84. https://doi.org/10.3390/infrastructures7060084