
Field-Deployable Fiber Optic Sensor System for Structural Health Monitoring of Steel Girder Highway Bridges


Abstract
:1. Introduction
2. Materials and Methods
3. Web-and-Flange Array Configuration
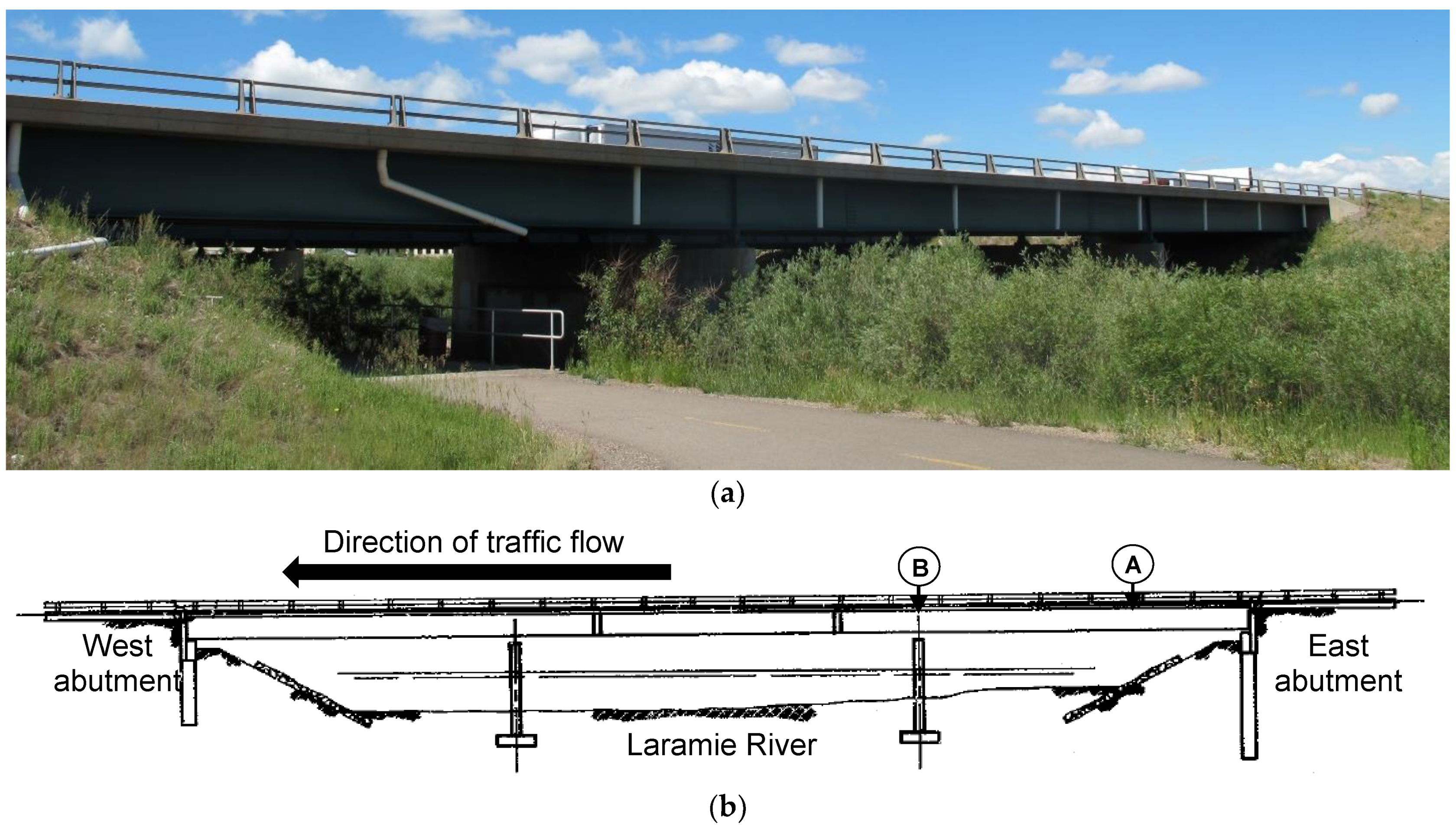
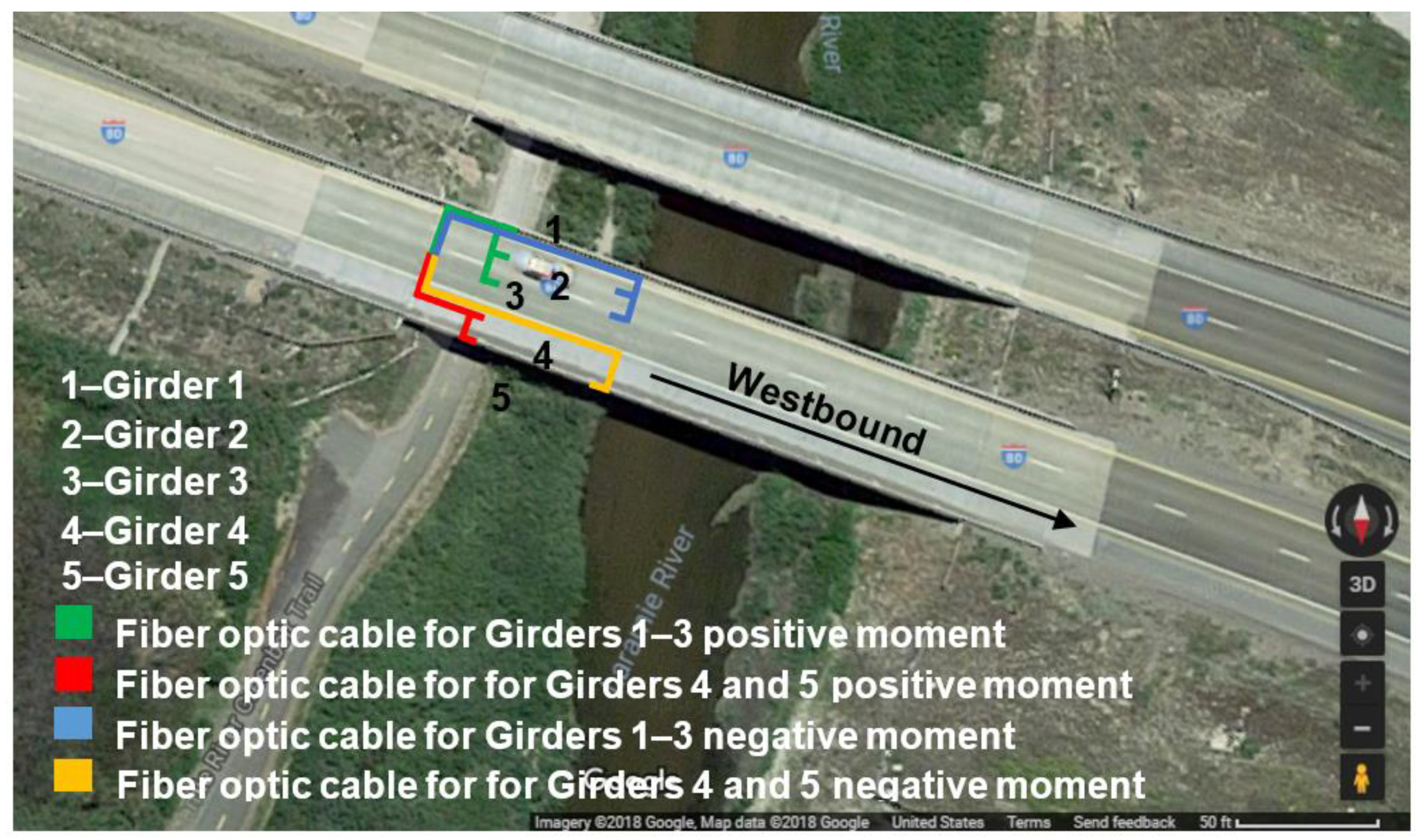
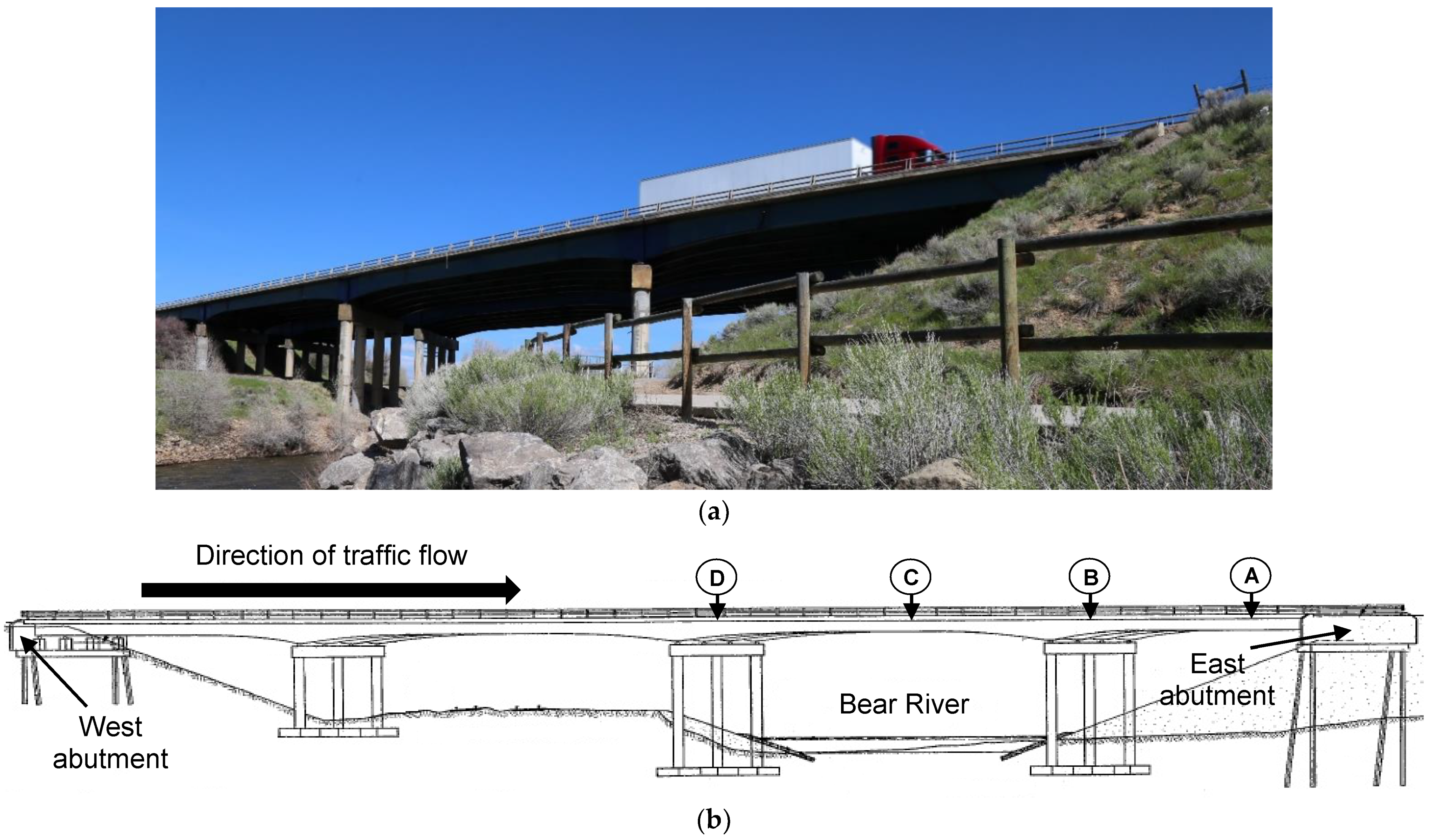
3.1. Bridge Description
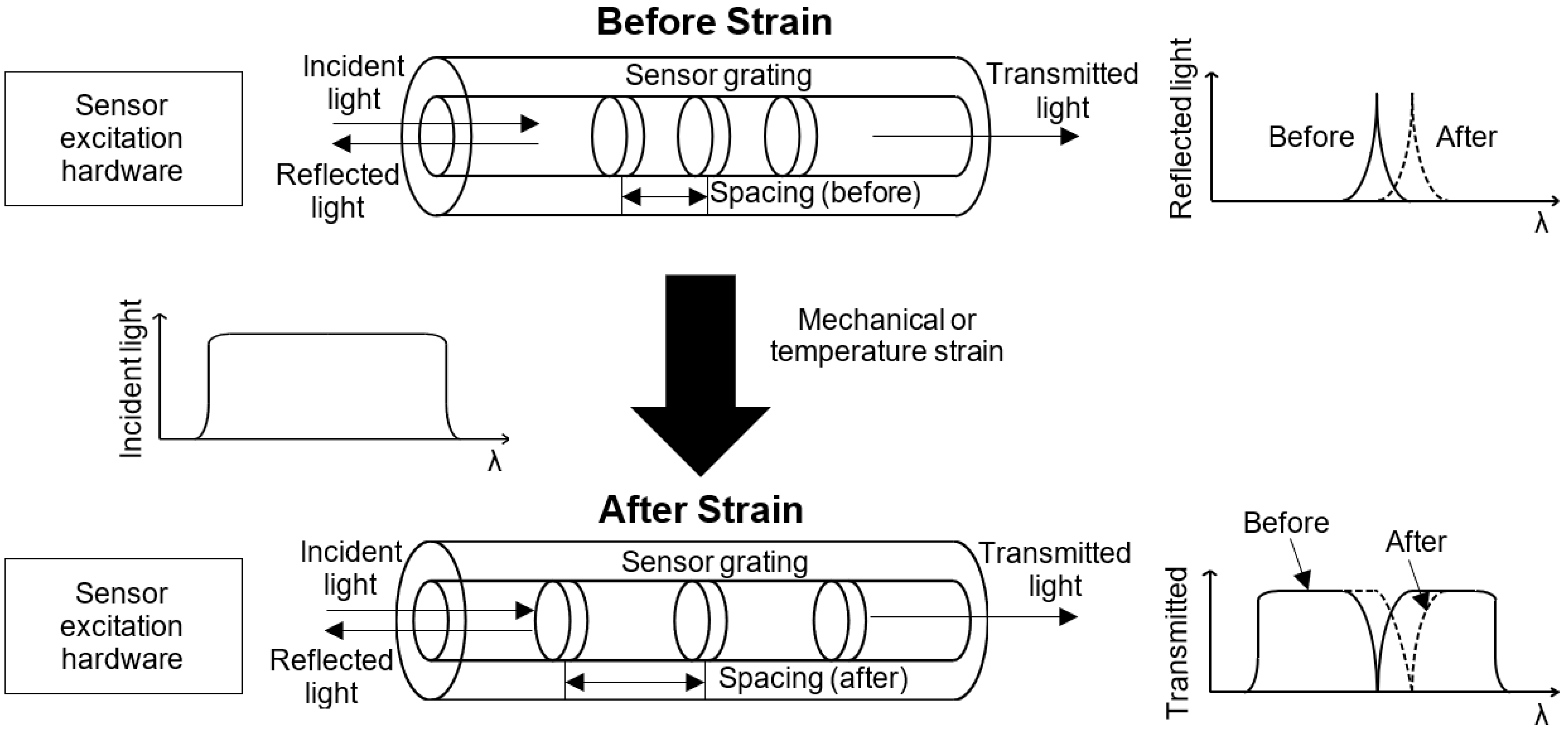
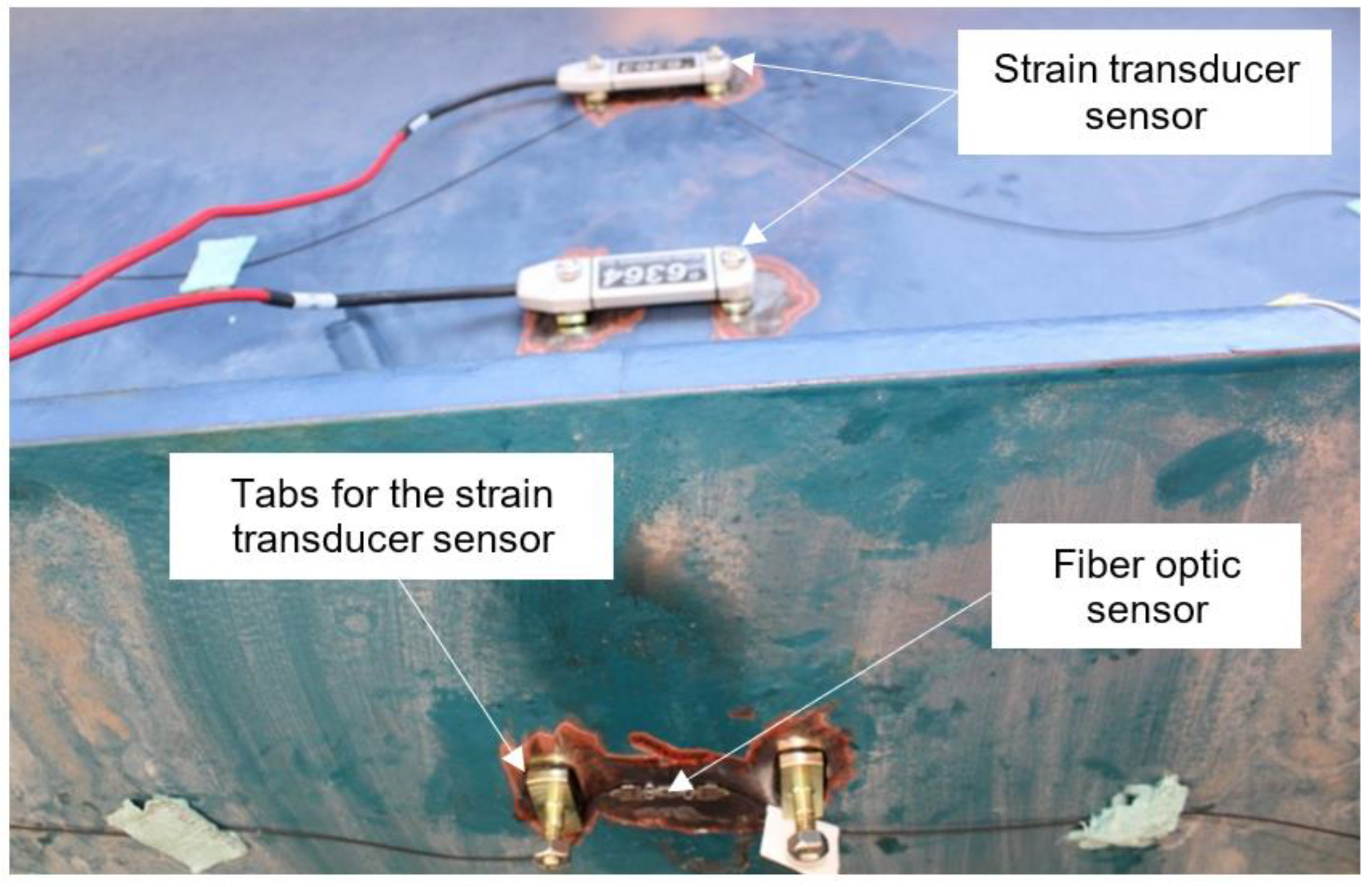
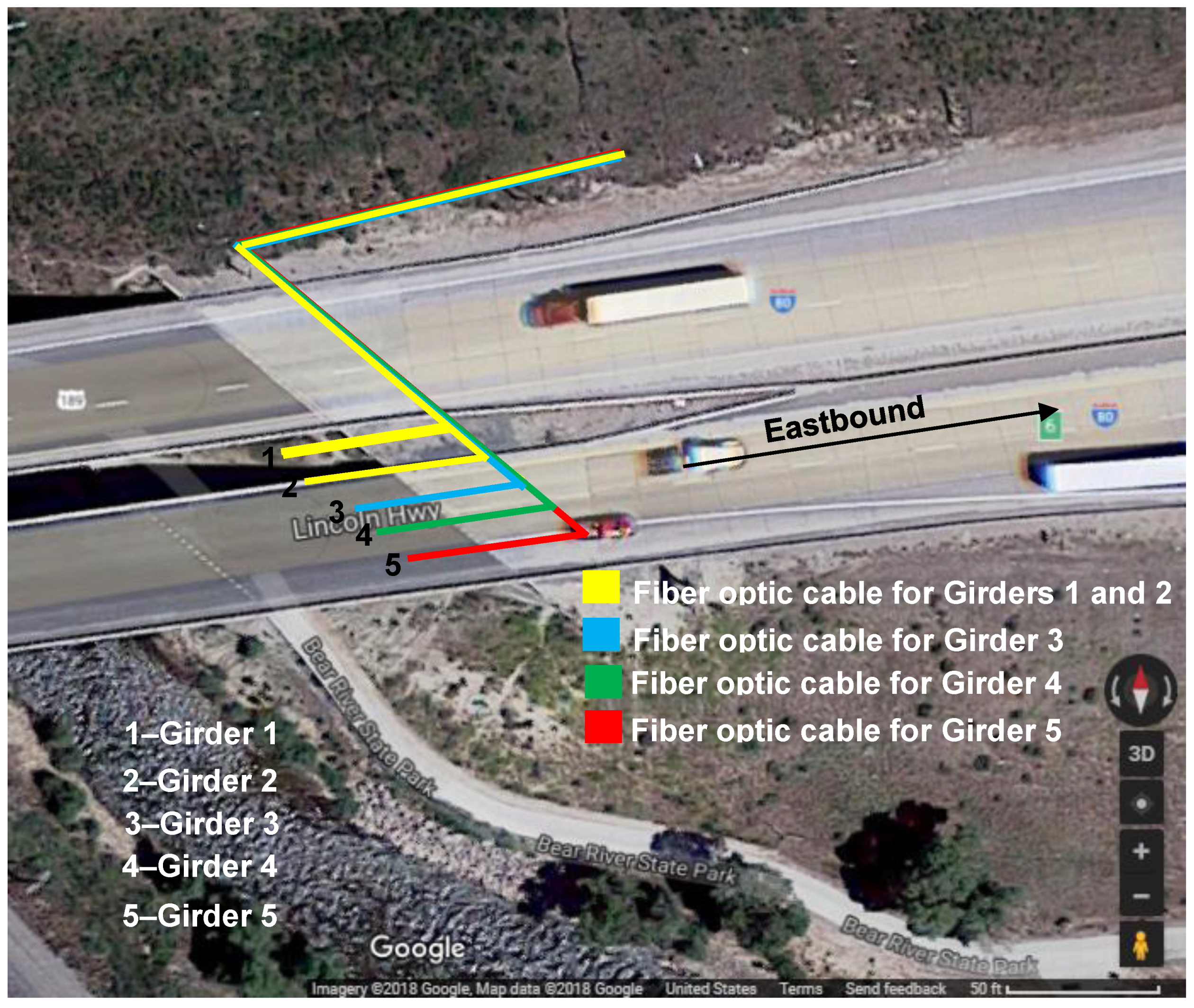
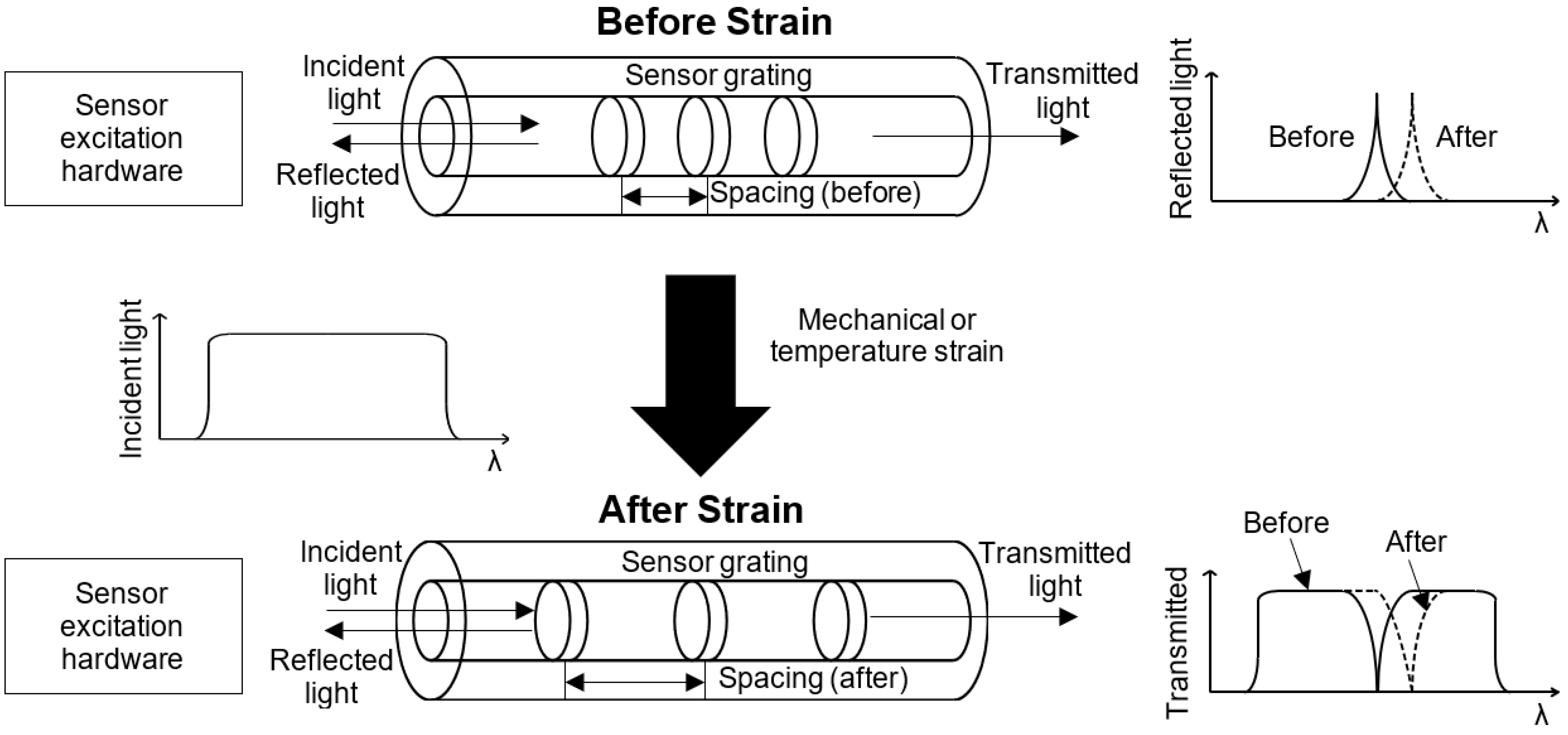
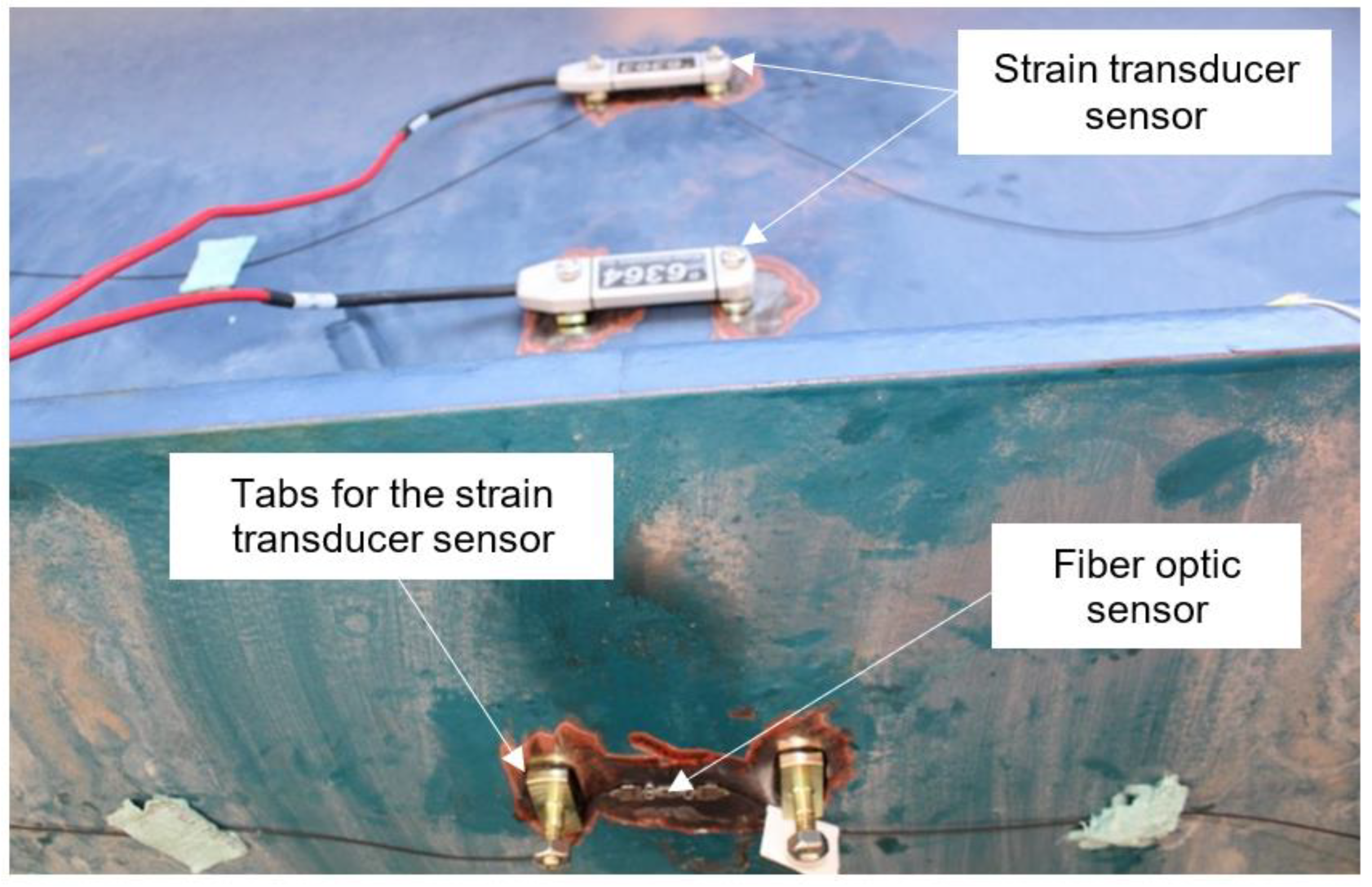
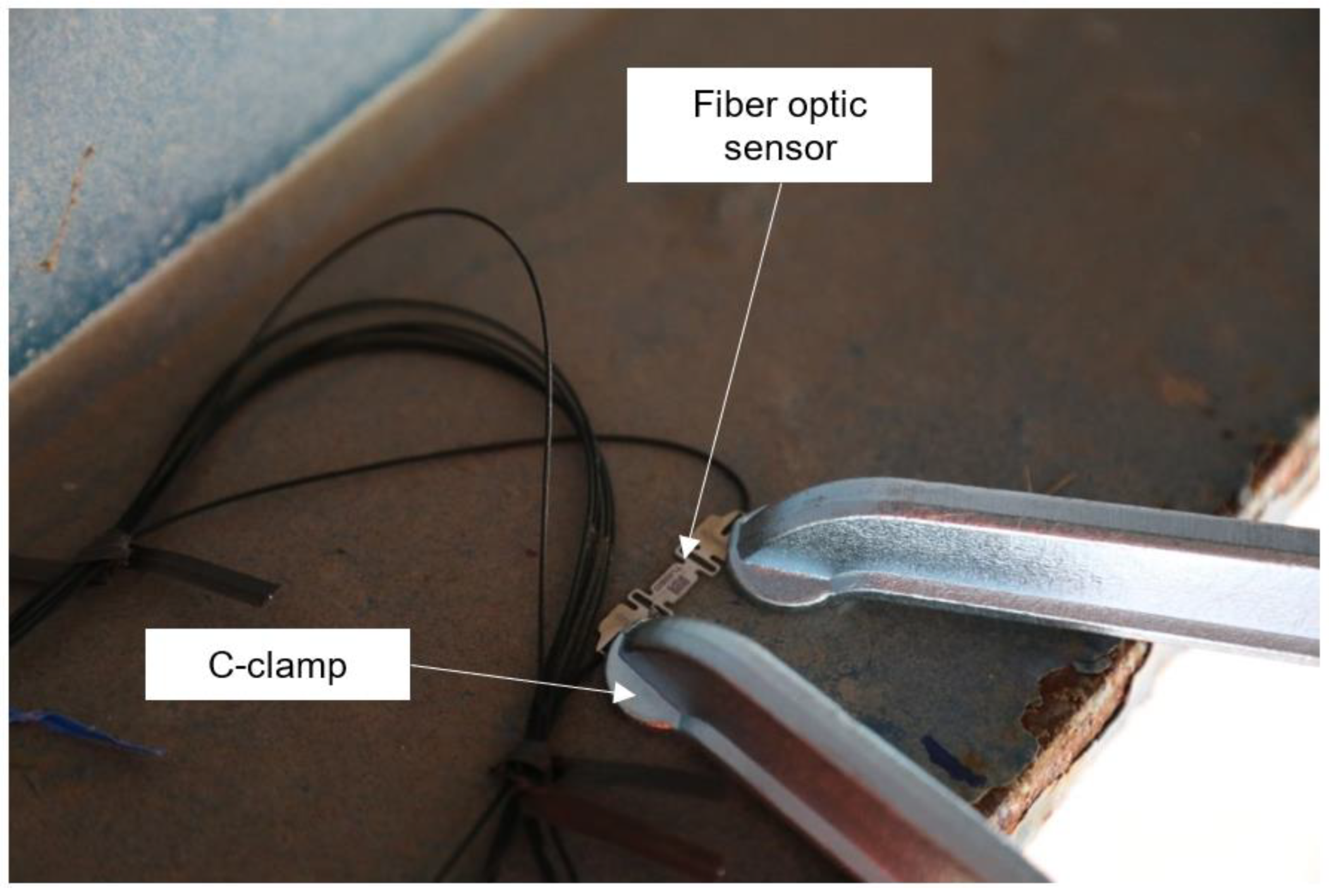
3.2. Fiber Optic System
3.3. Strain Transducer Sensor System
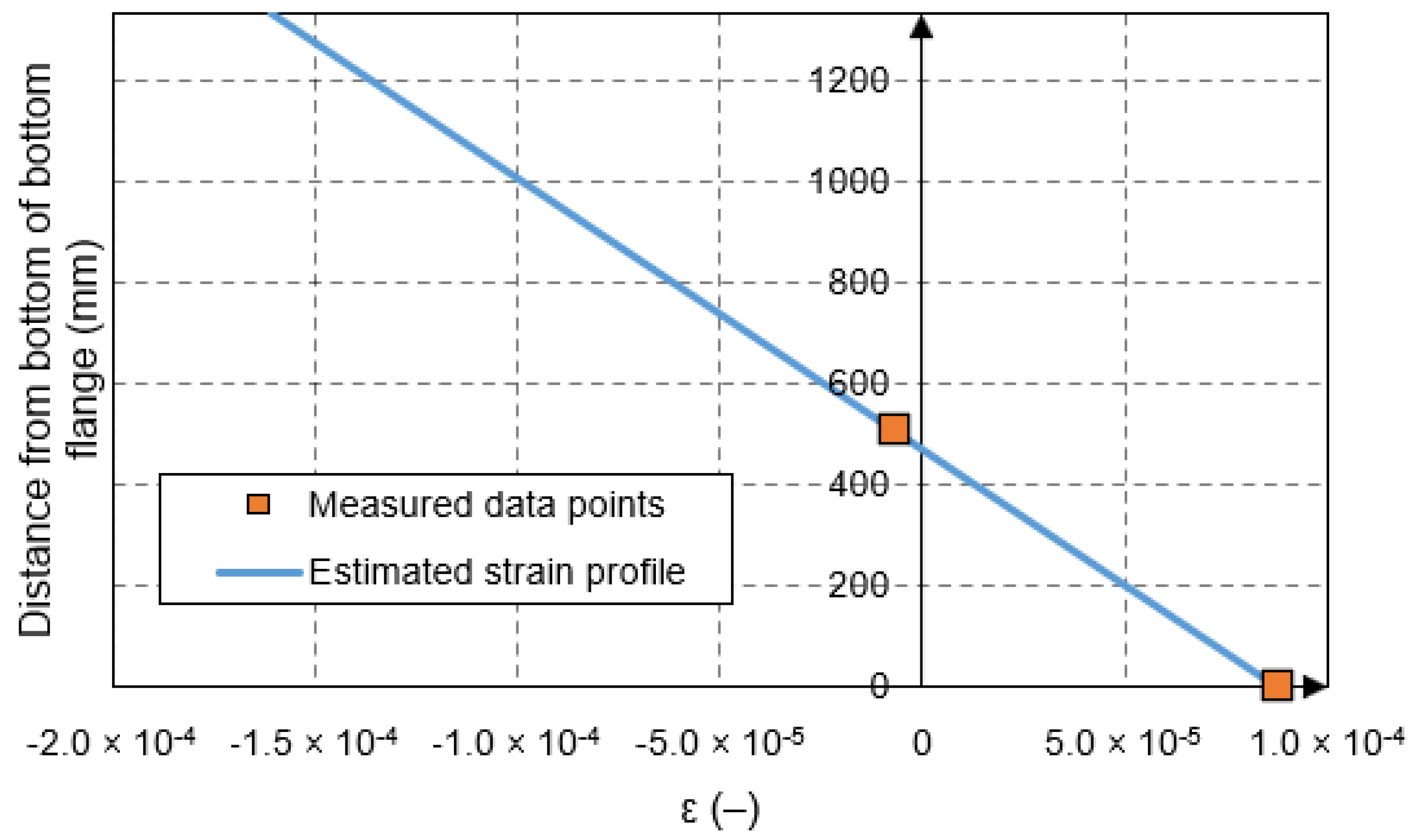
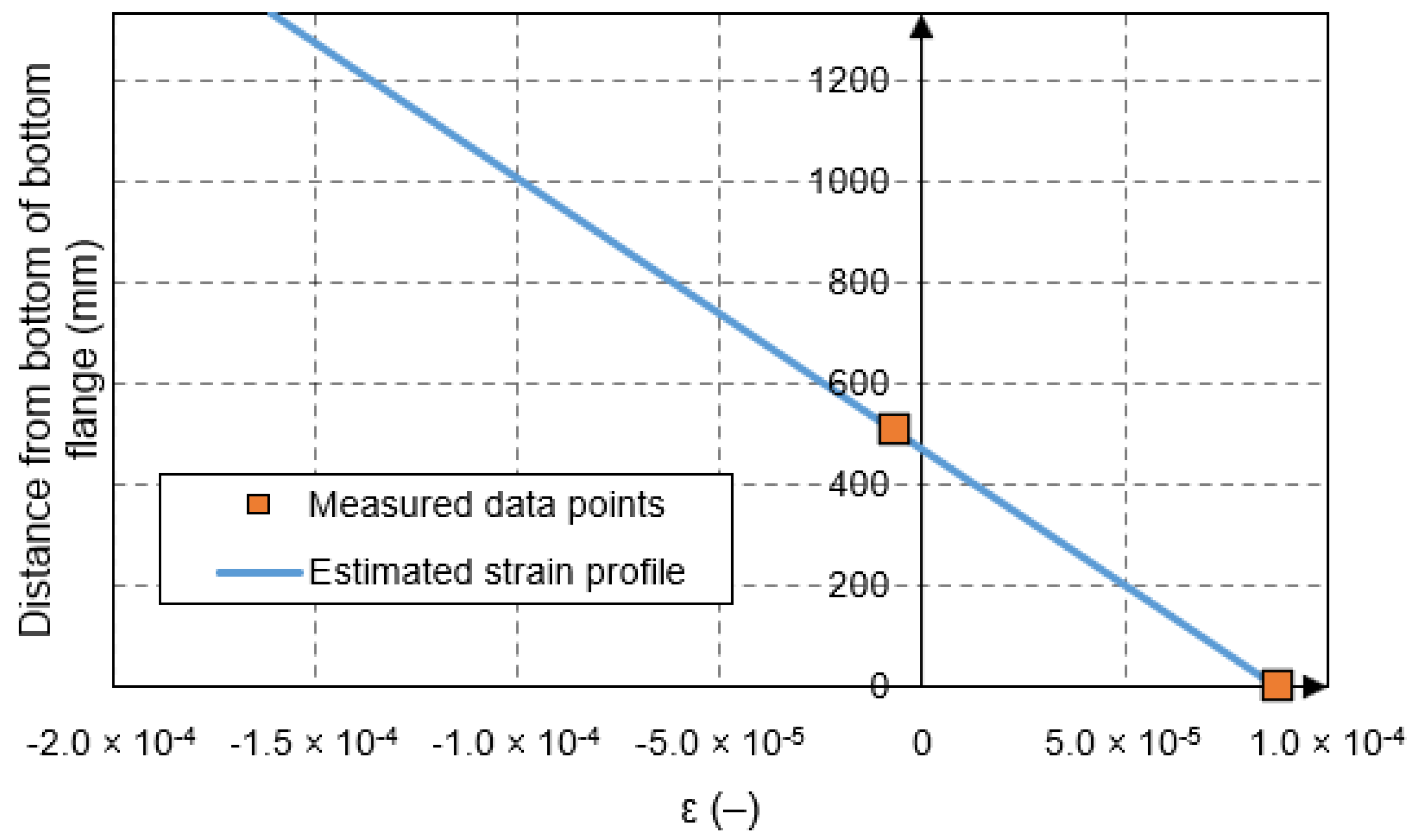
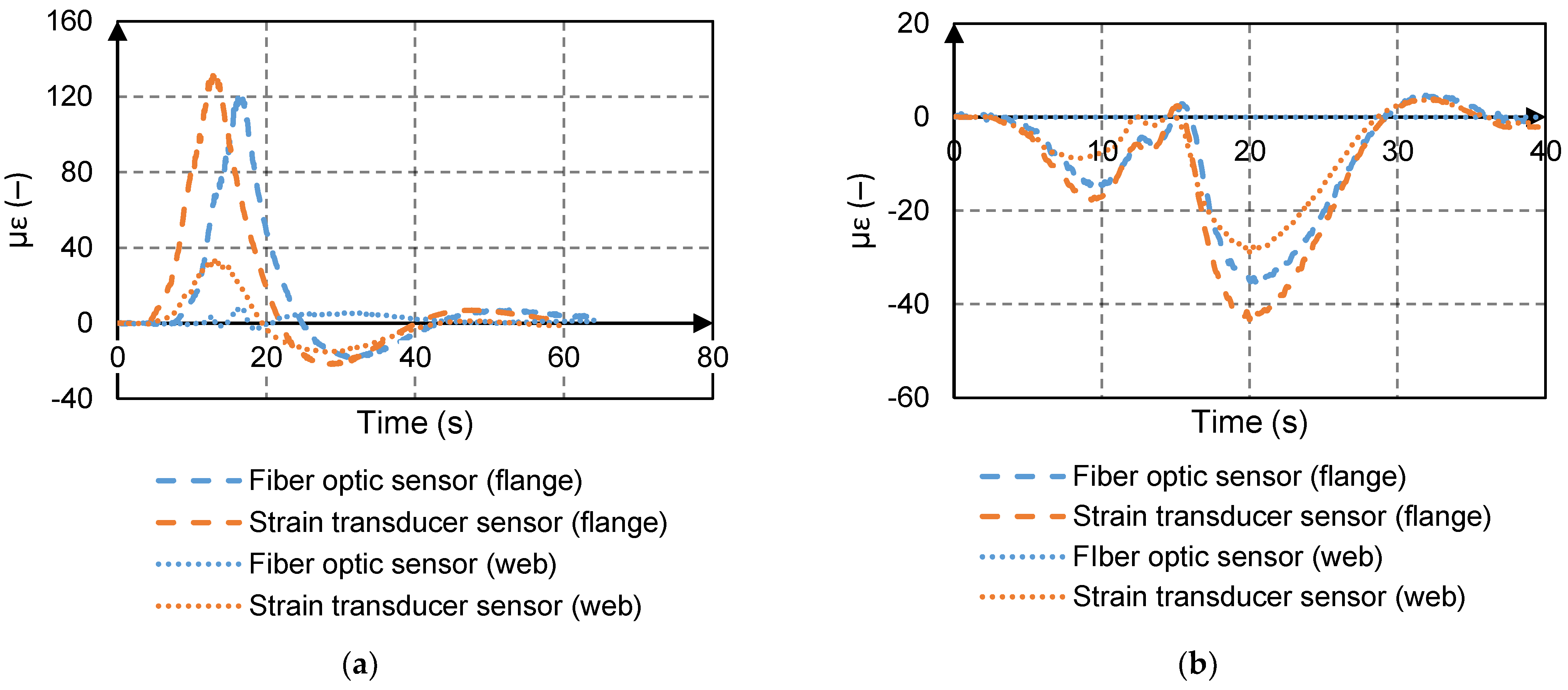
3.4. Results
3.5. Discussion
4. Flange-Only Array Configuration
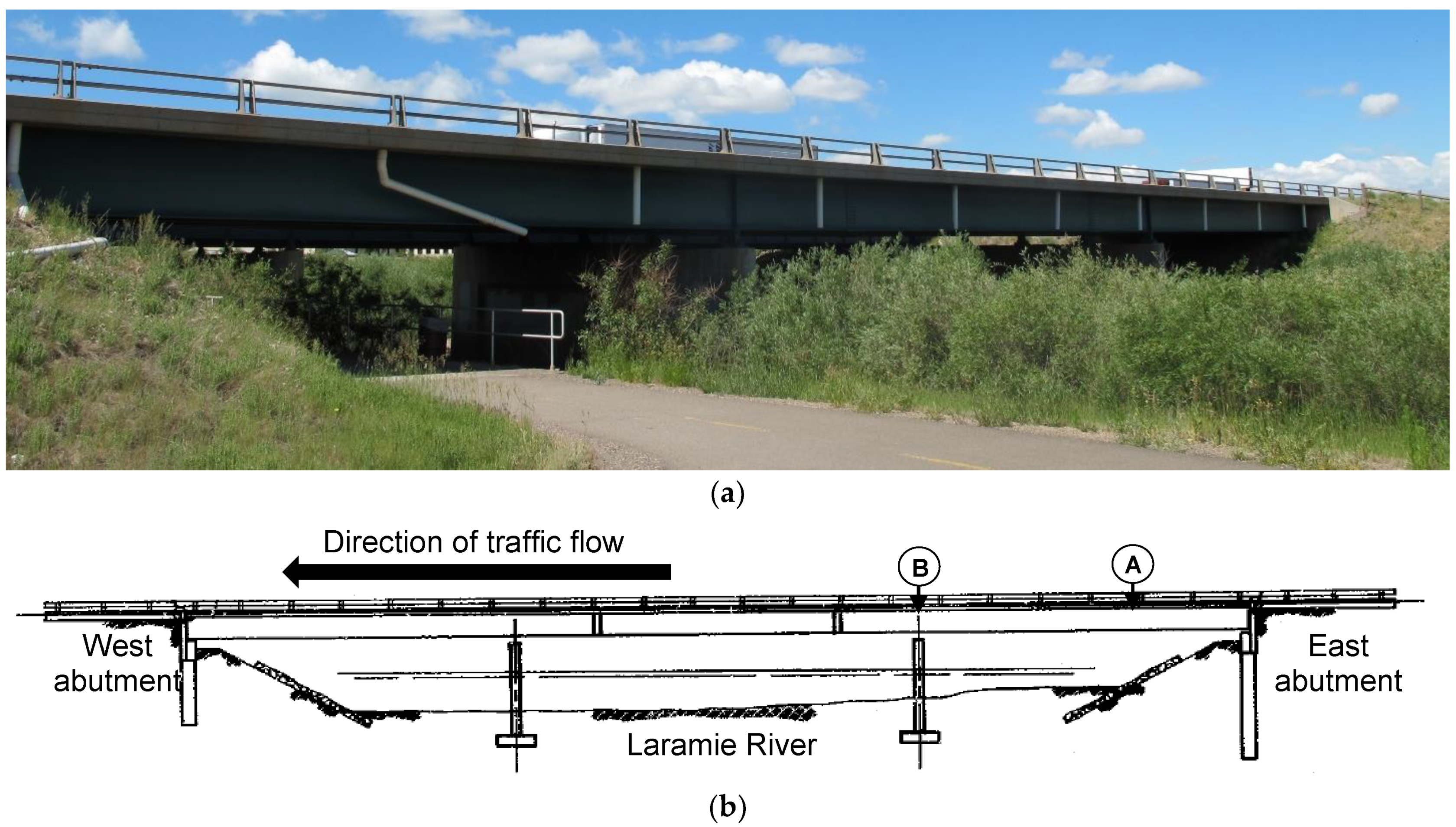
4.1. Bridge Description
4.2. Fiber Optic System
4.3. Results
4.4. Discussion
5. Conclusions
- Measured strain data from fiber optic sensors were reasonably close to the data measured using strain transducer sensors.
- Sensors in a web-and-flange array were prone to signal loss because the cables were highly multiplexed and tightly routed along the girder and cross frames. In contrast, sensors in the flange-only array better maintained signal integrity compared to the web-and-flange array because the configuration involved fewer multiplexed cables and had loosely routed cables.
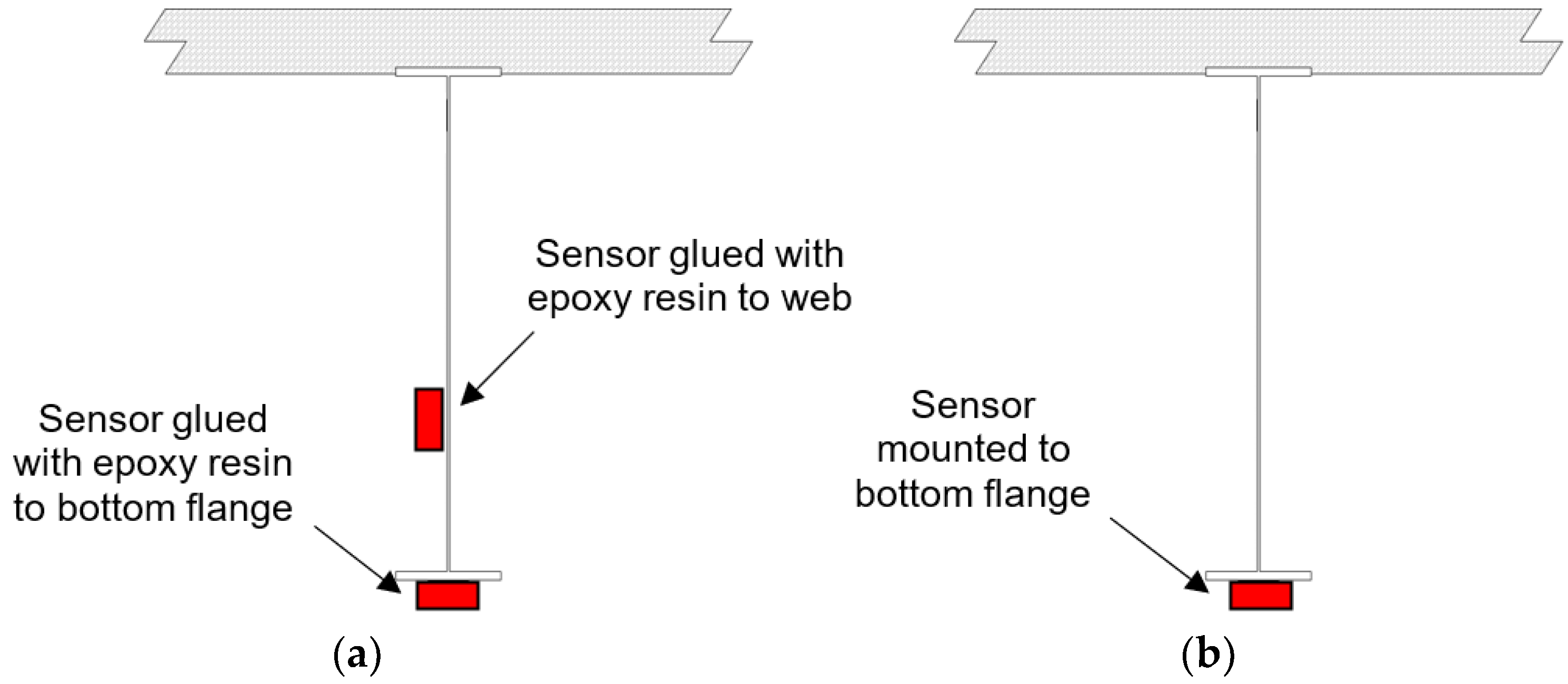
- Adhesive mounting of fiber optic strain sensors was not reliable because the conditions for proper curing, which were easily created in the laboratory, were difficult to ensure in the field. For the two bridges examined in this study, mechanical mounting of fiber optic strain sensors was more effective than the adhered mounting of sensors.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- American Society of Civil Engineers (ASCE). 2021 Report Card for America’s Infrastructure; ASCE: Reston, VA, USA, 2021. [Google Scholar]
- Bell, E.S.; Lefebvre, P.J.; Sanayei, M.; Brenner, B.; Sipple, J.D.; Peddle, J. Objective load rating of steel-girder bridge using structural modeling and health monitoring. J. Struct. Eng. 2013, 139, 1771–1779. [Google Scholar] [CrossRef]
- Collins, J.; Mullins, G.; Lewis, C.; Winters, D. State of the Practice and Art for Structural Health Monitoring of Bridge Substructures; Report No. FHWA-HRT-09-040; Turner-Fairbank Highway Research Center, United States Department of Transportation, Federal Highway Administration: McLean, VA, USA, 2014. [Google Scholar]
- Moyo, P.; Brownjohn, J.M.W.; Suresh, R.; Tjin, S.C. Development of fiber Bragg grating sensors for monitoring civil infrastructure. Eng. Struct. 2005, 27, 1828–1834. [Google Scholar] [CrossRef]
- Vardanega, P.J.; Webb, G.T.; Fidler, P.R.A.; Middleton, C.R. Chapter 29—Bridge monitoring. In Innovative Bridge Design Handbook Construction, Rehabilitation and Maintenance; Pipinato, A., Ed.; Butterworth-Heinemann: Oxford, UK, 2016; pp. 759–775. ISBN 9780128000588. [Google Scholar]
- Modares, M.; Waksmanski, N. Overview of structural health monitoring for steel bridges. Pract. Period. Struct. Des. Constr. 2013, 18, 187–191. [Google Scholar] [CrossRef]
- Santarsiero, G.; Masi, A.; Picciano, V.; Digrisolo, A. The Italian guidelines on risk classification and management of bridges: Applications and remarks on large scale risk assessments. Infrastructures 2021, 6, 111. [Google Scholar] [CrossRef]
- Maes, K.; Van Meerbeeck, L.; Reynders, E.P.B.; Lombaert, G. Validation of vibration-based structural health monitoring on retrofitted railway bridge KW51. Mech. Syst. Signal Process. 2022, 165, 108380. [Google Scholar] [CrossRef]
- Sony, S.; Gamage, S.; Sadhu, A.; Samarabandu, J. Multiclass damage identification in a full-scale bridge using optimally tuned one-dimensional convolutional neural network. J. Comput. Civ. Eng. 2022, 36, 04021035. [Google Scholar] [CrossRef]
- Li, X.; Xiao, Y.; Guo, H.; Zhang, J. A BIM based approach for structural health monitoring of bridges. KSCE J. Civ. Eng. 2022, 26, 155–165. [Google Scholar] [CrossRef]
- Catbas, F.N. Structural health monitoring: Applications and data analysis. In Structural Health Monitoring of Civil Infrastructure Systems; Karbhari, V.M., Ansari, F., Eds.; Woodhead Publishing Limited: Sawston, UK, 2009; pp. 1–39. [Google Scholar]
- Zhang, B.; Benmokrane, B.; Nicole, J.F.; Masmoudi, R. Evaluation of fibre optic sensors for structural condition monitoring. Mater. Struct. 2002, 35, 357–364. [Google Scholar] [CrossRef]
- Tennyson, R.C.; Mufti, A.A.; Rizkalla, S.; Tadros, G.; Benmokrane, B. Structural health monitoring of innovative bridges in Canada with fiber optic sensors. Smart Mater. Struct. 2001, 10, 560–573. [Google Scholar] [CrossRef]
- Kersey, A.D.; Davis, M.A.; Patrick, H.J.; LeBlanc, M.; Koo, K.P.; Askins, C.G.; Putman, M.A.; Friebele, E.J. Fiber grating sensors. J. Light. Technol. 1997, 15, 1442–1463. [Google Scholar] [CrossRef] [Green Version]
- Webb, G.T.; Vardenga, P.J.; Hoult, N.A.; Fidler, R.A.; Bennett, P.J.; Middleton, C.R. Analysis of fiber optic strain-monitoring data from a prestressed concrete bridge. J. Bridge Eng. 2017, 22, 05017002. [Google Scholar] [CrossRef] [Green Version]
- Maaskant, R.; Alavie, T.; Measures, R.M.; Tadros, G.; Rizkalla, S.H.; Guha-Thakurta, A. Fiber-optic Bragg grating sensors for bridge monitoring. Cem. Concr. Compos. 1997, 19, 21–33. [Google Scholar] [CrossRef]
- Wan, C.; Hong, W.; Liu, J.; Wu, Z.; Xu, Z.; Li, S. Bridge assessment and health monitoring with distributed long-gauge FBG sensors. Int. J. Distrib. Sens. Netw. 2013, 9, 494260. [Google Scholar] [CrossRef]
- Casas, J.R.; Cruz, P.J. Fiber optic sensors for bridge monitoring. J. Bridge Eng. 2003, 8, 362–373. [Google Scholar] [CrossRef] [Green Version]
- Regier, R.; Hoult, N.A. Distributed strain behavior of a reinforced concrete bridge: Case study. J. Bridge Eng. 2014, 19, 05014007. [Google Scholar] [CrossRef]
- Kong, X.; Ho, S.C.M.; Song, G.B.; Cai, C.S. Scour monitoring system using fiber Bragg grating sensor and water swellable polymers. J. Bridge Eng. 2017, 22, 04017029. [Google Scholar] [CrossRef]
- Jeon, J.; Lee, J.; Shin, D.; Park, H. Development of dam safety management system. Adv. Eng. Softw. 2009, 40, 554–563. [Google Scholar] [CrossRef]
- Sharma, V.B.; Singh, K.; Gupta, R.; Joshi, A.; Dubey, R.; Gupta, V.; Bharadwaj, S.; Zafar, M.I.; Bajpai, S.; Khan, M.A.; et al. Review of structural health monitoring techniques in pipeline and wind turbine industries. Appl. Syst. Innov. 2021, 4, 59. [Google Scholar] [CrossRef]
- Bossi, G.; Schenato, L.; Marcato, G. Structural health monitoring of a road tunnel intersecting a large and active landslide. Appl. Sci. 2017, 7, 1271. [Google Scholar] [CrossRef] [Green Version]
- Wu, T.; Liu, G.L.; Xing, F. Recent progress of fiber-optic sensors for the structural health monitoring of civil infrastructure. Sensors 2020, 20, 4517. [Google Scholar] [CrossRef]
- Costa, B.J.; Figueiras, J.A. Evaluation of a strain monitoring system for existing steel railway bridges. J. Constr. Steel Res. 2012, 72, 179–191. [Google Scholar] [CrossRef]
- Van der Kooi, K.; Hoult, N.A.; Le, H. Monitoring and in-service railway bridge with a distributed fiber optic strain sensing system. J. Bridge Eng. 2018, 23, 05018007. [Google Scholar] [CrossRef]
- Cocking, S.; Alexakis, H.; DeJong, M. Distributed dynamic fibre-optic strain monitoring of the behaviour of a skewed masonry arch railway bridge. J. Civ. Struct. Health Monit. 2021, 11, 989–1012. [Google Scholar] [CrossRef]
- Gebremichael, Y.M.; Li, W.; Meggit, B.T.; Boyle, W.J.; Grattan, K.T.; McKinley, B.; Boswell, L.F.; Aarnes, K.A.; Aasen, S.E.; Tynes, B.; et al. Field deployable, multiplexed Bragg grating sensor system used in an extensive highway bridge monitoring evaluation tests. IEEE Sens. J. 2005, 5, 510–519. [Google Scholar] [CrossRef]
- Doornink, J.D. Monitoring the Structural Condition of Fracture-Critical Bridges Using Fiber Optic Technology. Ph.D. Thesis, Iowa State University, Ames, IA, USA, 2006. [Google Scholar]
- Phares, B.M.; Greimann, L.; Choi, H. Integration of Bridge Damage Detection Concepts and Components Volume I: Strain-Based Damage Detection; Report No. IHRB Project TR-636; Iowa Department of Transportation: Ames, IA, USA, 2013. [Google Scholar]
- Hubbard, P.; Yust, M.; Costley, R.; Cox, B.; Menq, F.; Murphy, J.; Soga, K. Distributed Acoustic Sensing (DAS) data from the NHERI@UTexas Thumper Shaker Truck and 240 m of Fiber Along the Blackhawk Levee. In Proceedings of the NHERI@UTexas DAS Levee Imaging Workshop, DesignSafe-CI, Baton Rouge, LA, USA, 21–22 October 2021. [Google Scholar] [CrossRef]
- Maurais, D.T. Strain Transfer Behavior of Notch Embedded Fiber Bragg Gratings. Master’s Thesis, University of Wyoming, Laramie, WY, USA, 2012. [Google Scholar]
- Jung, M.A. Development of a Fiber Optic Based Load Testing System for Highway Bridges. Master’s Thesis, University of Wyoming, Laramie, WY, USA, 2015. [Google Scholar]
- Danforth, M.M. Laramie River Bridge Load-Testing Plan with Sensor Verification and RFID Feasibility of Permitted Vehicles. Master’s Thesis, University of Wyoming, Laramie, WY, USA, 2015. [Google Scholar]
- Barker, M.G. Quantifying field test behavior for rating steel girder bridges. J. Bridge Eng. 2001, 6, 254–261. [Google Scholar] [CrossRef]
- American Association of State Highway and Transportation Officials (AASHTO). Manual for Bridge Evaluation, 3rd ed.; AASHTO: Washington, DC, USA, 2018. [Google Scholar]
- Lu, R.; Judd, J.P.; Barker, M.G. Field load rating and grillage analysis method for skewed steel girder highway bridges. J. Bridge Eng. 2021, 26, 05021013. [Google Scholar] [CrossRef]
- Hendy, C.R.; Presta, F. Transverse web stiffeners and shear moment interaction for steel plate girder bridges. Struct. Eng. 2008, 86, 017. [Google Scholar]
- Yarnold, M.T.; Golecki, T.; Weidner, J. Identification of composite action through truck load testing. Front. Built Environ. 2018, 4, 74. [Google Scholar] [CrossRef]
- Lu, R.; Judd, J.P. Field testing of highway bridges enhanced by assumptions of composite action. In Proceedings of the International Conference on Advances in Technology and Computing—Advancements in Applications of Engineering and Science in Technology, Kelaniya, Sri Lanka, 18–19 December 2021. [Google Scholar]
- American Association of State Highway and Transportation Officials (AASHTO). AASHTO Standard Specifications for Highway Bridges, 17th ed.; AASHTO: Washington, DC, USA, 2002. [Google Scholar]
- Lu, R.; Judd, J.P. Field evaluation of unintended composite action between steel plate girders and concrete slab in highway bridges. Ce/Papers 2019, 3, 171–180. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Location | Top Flange Width | Top Flange Thickness | Web Height | Web Thickness | |
|---|---|---|---|---|---|
| A | Girders 1–4 | 305 (12) | 19.1 (0.75) | 1300 (51) | 9.53 (0.38) |
| Girder 5 | 305 (12) | 19.1 (0.75) | 1300 (51) | 11.1 (0.44) | |
| B | Girders 1–4 | 305 (12) | 25.4 (1) | 1300 (51) | 1300 (51) |
| Girder 5 | 305 (12) | 19.1 (0.75) | 1300 (51) | 11.1 (0.44) | |
| Location | Top Flange Width | Top Flange Thickness | Web Height | Web Thickness | Bottom Flange Width | Bottom Flange Thickness | |
|---|---|---|---|---|---|---|---|
| A | Girders 1–4 | 330 (13) | 25.4 (1) | 1450 (57) | 7.87 (0.31) | 330 (13) | 25.4 (1) |
| Girder 5 | 305 (12) | 15.9 (0.63) | 1370 (54) | 14.3 (0.56) | 305 (12) | 25.4 (1) | |
| B | Girders 1–4 | 330 (13) | 25.4 (1) | 1450–2210 (57–87) | 7.87 (0.31) | 330 (13) | 25.4 (1) |
| Girder 5 | 305 (12) | 25.4 (1) | 1370–2130 (54–84) | 14.3 (0.56) | 305 (12) | 25.4 (1) | |
| C | Girders 1–4 | 330 (13) | 28.7 (1.13) | 1450 (57) | 7.87 (0.31) | 330 (13) | 28.7 (1.13) |
| Girder 5 | 305 (12) | 15.9 (0.63) | 1370 (54) | 14.3 (0.56) | 305 (12) | 25.4 (1) | |
| D | Girders 1–4 | 330 (13) | 31.8 (1.25) | 1450–2240 (57–88) | 7.87 (0.31) | 330 (13) | 31.8 (1.25) |
| Girder 5 | 305 (12) | 25.4 (1) | 1370–2130 (54–84) | 14.3 (0.56) | 305 (12) | 25.4 (1) | |
| Test | Girder 1 | Girder 2 | Girder 3 | Girder 4 | Girder 5 |
|---|---|---|---|---|---|
| SHM | 14.6 | 37.3 | 81.3 | 43.1 | 16.3 |
| Diagnostic | 12.3 | 33.0 | 79.8 | 49.5 | 14.4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, R.; Judd, J. Field-Deployable Fiber Optic Sensor System for Structural Health Monitoring of Steel Girder Highway Bridges. Infrastructures 2022, 7, 16. https://doi.org/10.3390/infrastructures7020016
Lu R, Judd J. Field-Deployable Fiber Optic Sensor System for Structural Health Monitoring of Steel Girder Highway Bridges. Infrastructures. 2022; 7(2):16. https://doi.org/10.3390/infrastructures7020016
Chicago/Turabian StyleLu, Renxiang, and Johnn Judd. 2022. "Field-Deployable Fiber Optic Sensor System for Structural Health Monitoring of Steel Girder Highway Bridges" Infrastructures 7, no. 2: 16. https://doi.org/10.3390/infrastructures7020016
APA StyleLu, R., & Judd, J. (2022). Field-Deployable Fiber Optic Sensor System for Structural Health Monitoring of Steel Girder Highway Bridges. Infrastructures, 7(2), 16. https://doi.org/10.3390/infrastructures7020016