
Eigenfrequency-Based Bayesian Approach for Damage Identification in Catenary Poles



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Case Study
2.1. Simulation of Damaged Pole
2.2. Damage Features
3. Methodology
3.1. Bayesian Inverse Problems
3.2. Bayesian Damage Identification Algorithms
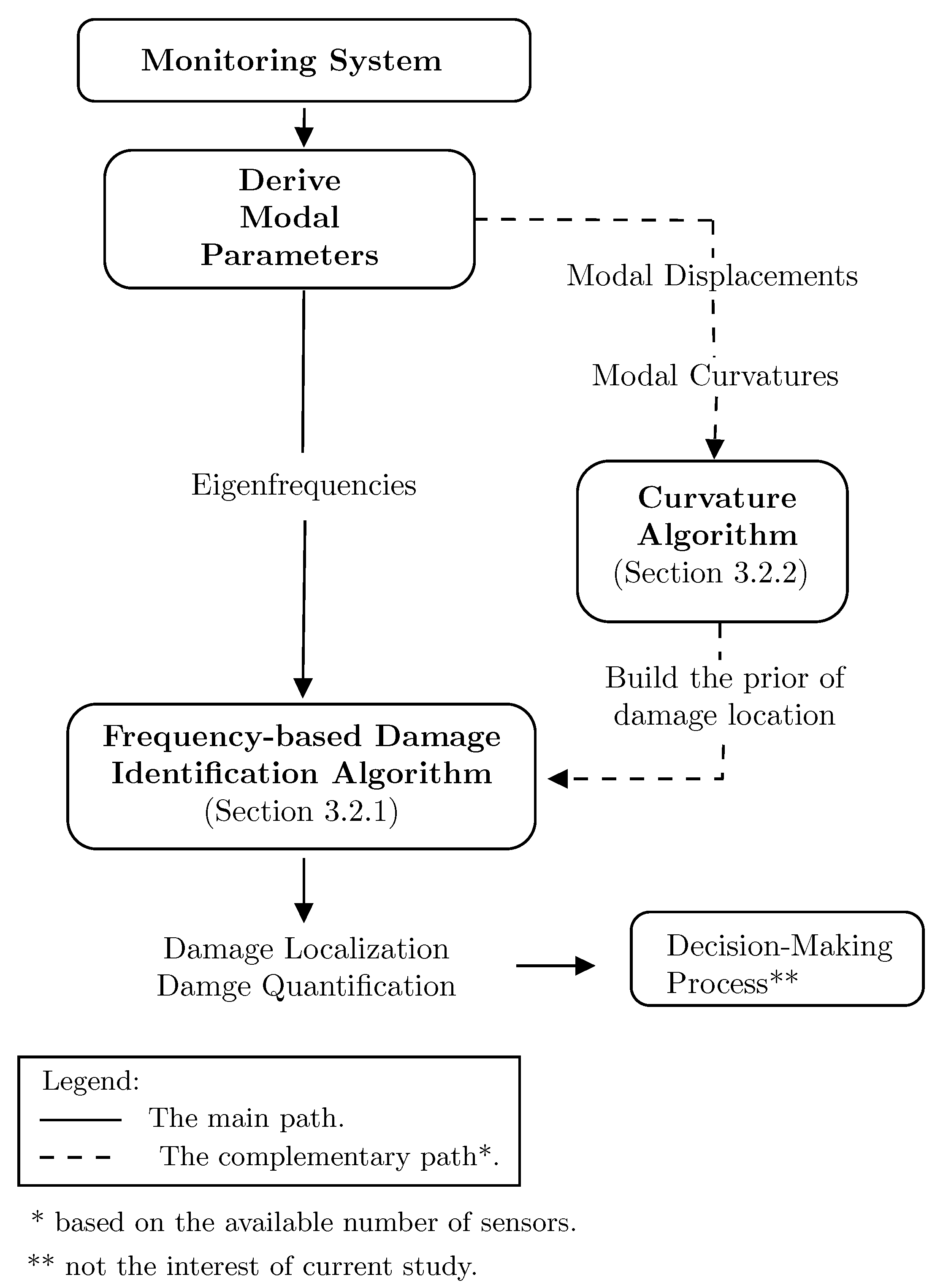
3.2.1. Frequency-Based Damage Identification Algorithm
3.2.2. Curvature-Based Damage Identification Algorithm
4. Results
4.1. Implementation of Damage Identification Algorithms
4.2. Implementation of the Frequency-Based Damage Identification Algorithm
4.3. Implementation of the Curvature-Based Damage Identification Algorithm
5. Discussion
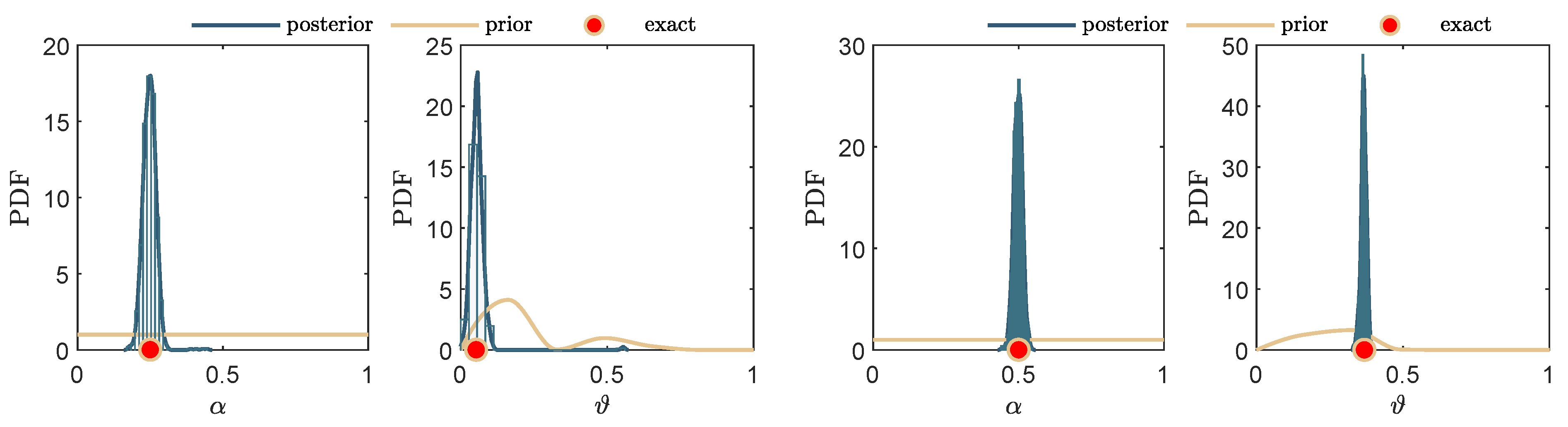
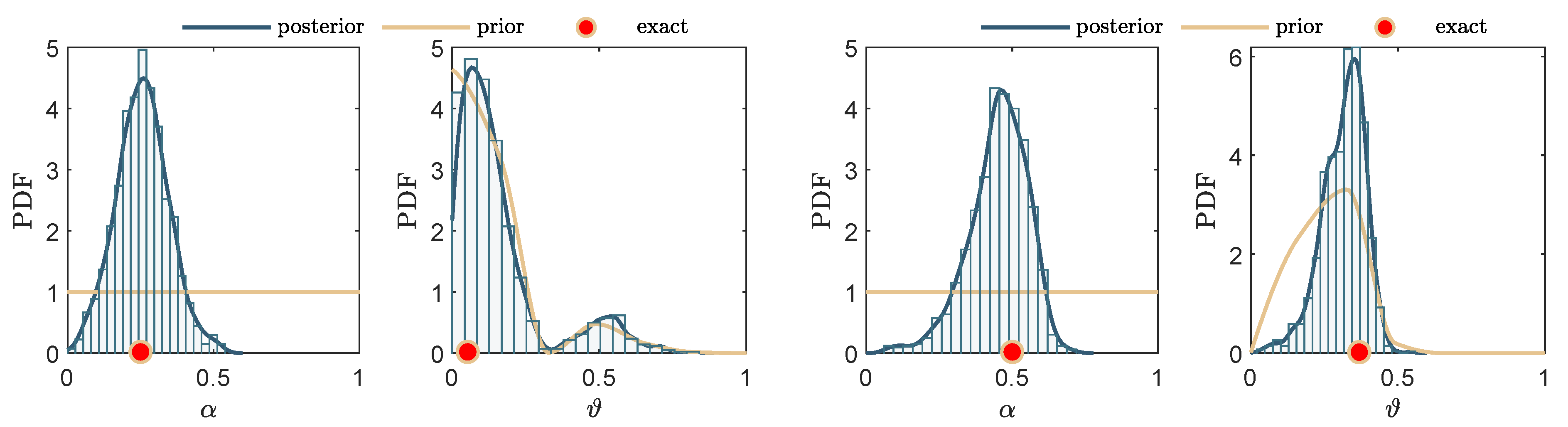
5.1. Discussion of the Frequency-Based Damage Identification Algorithm
5.2. Discussion of the Curvature-Based Damage Identification Algorithm
6. Conclusions
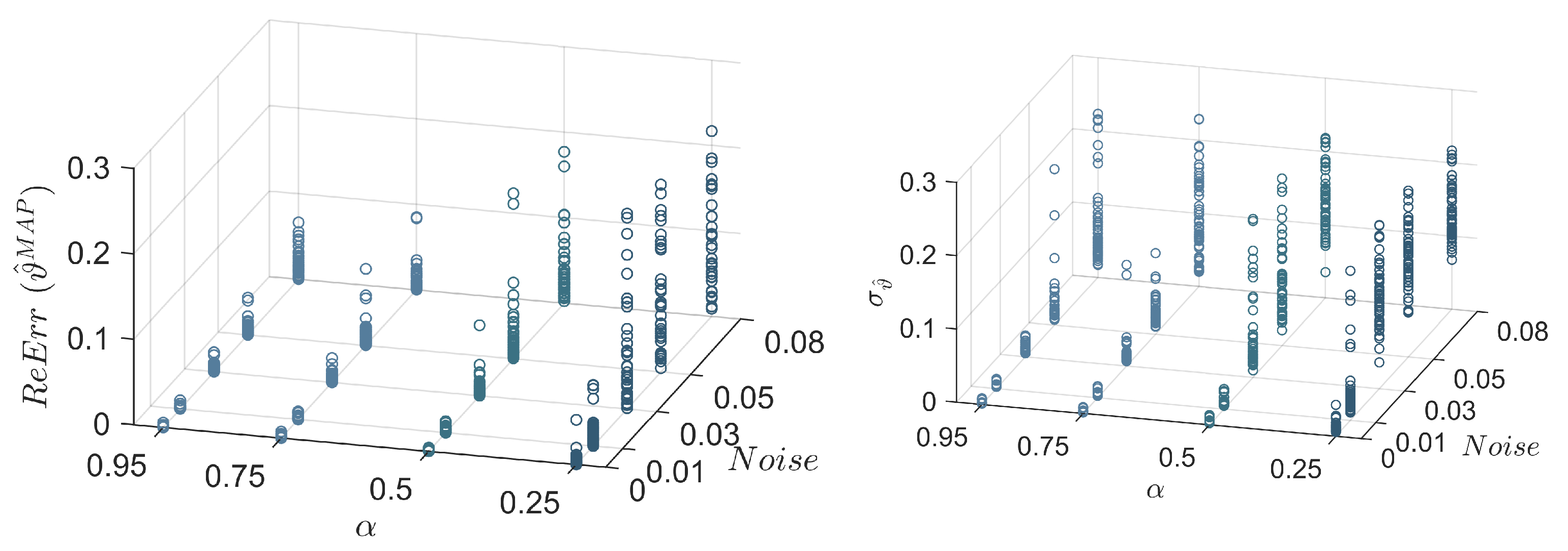
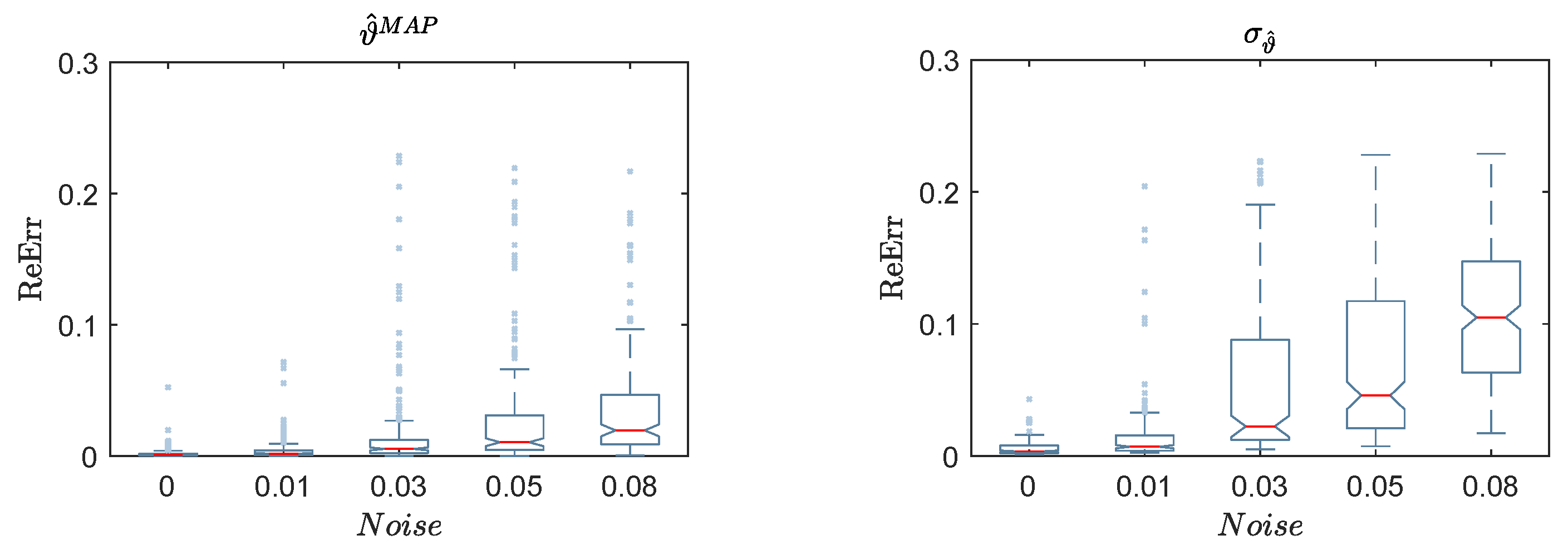
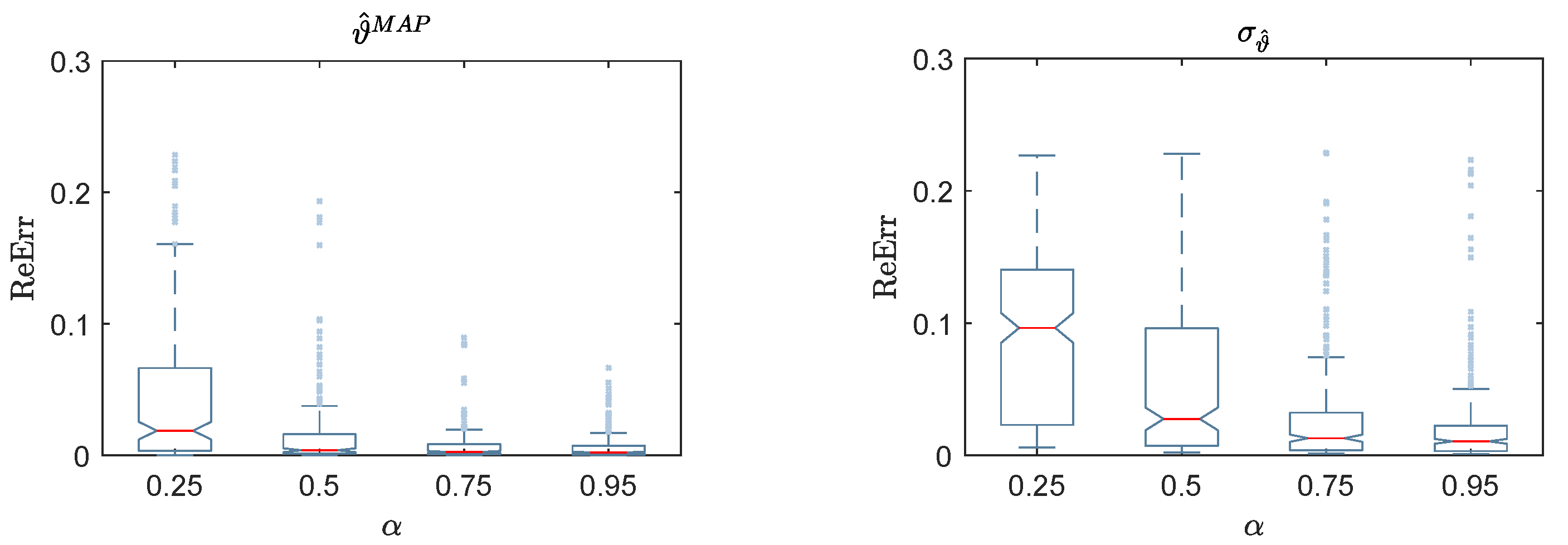
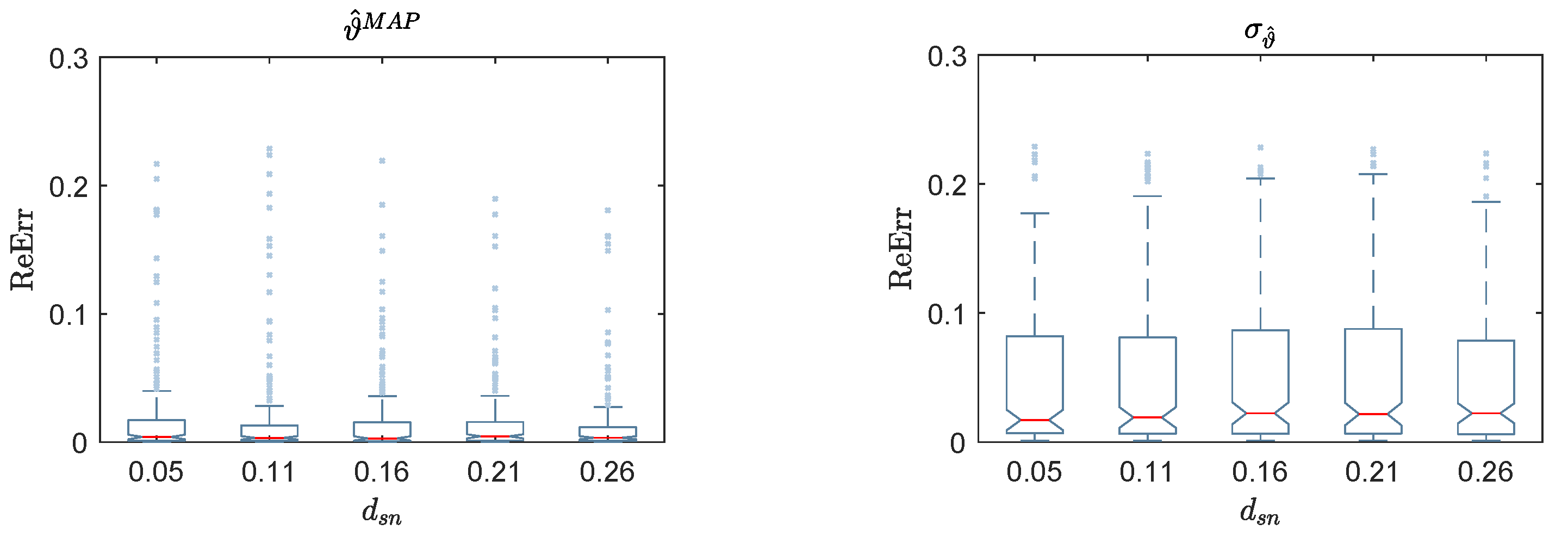
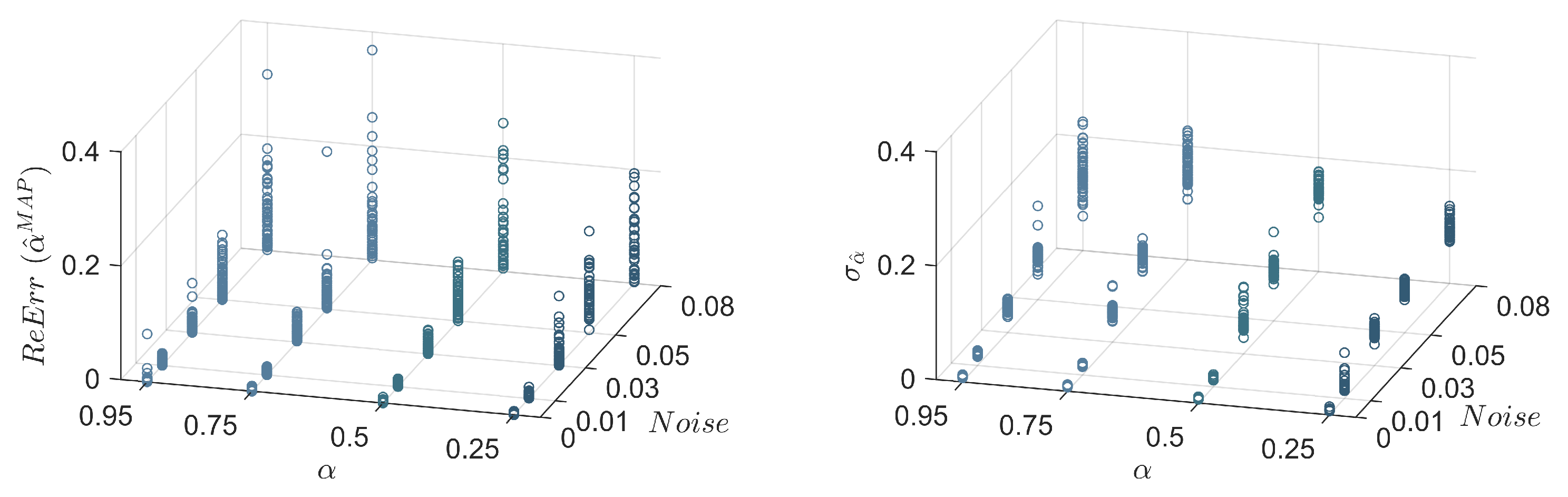
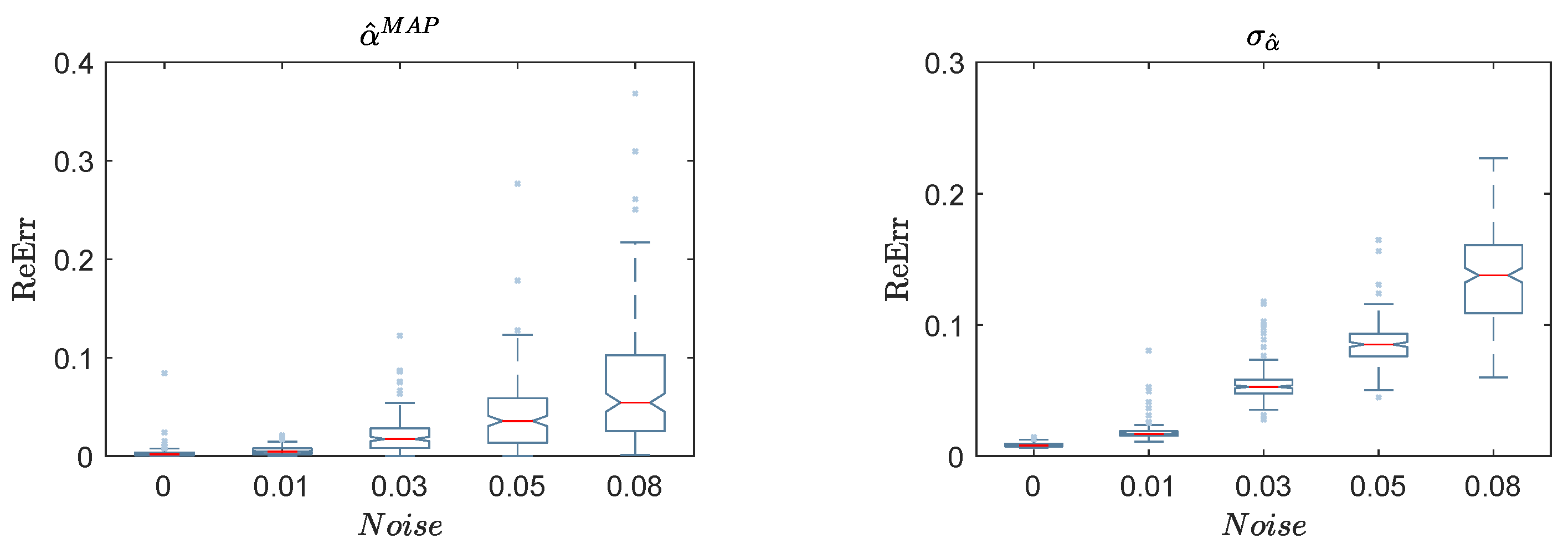
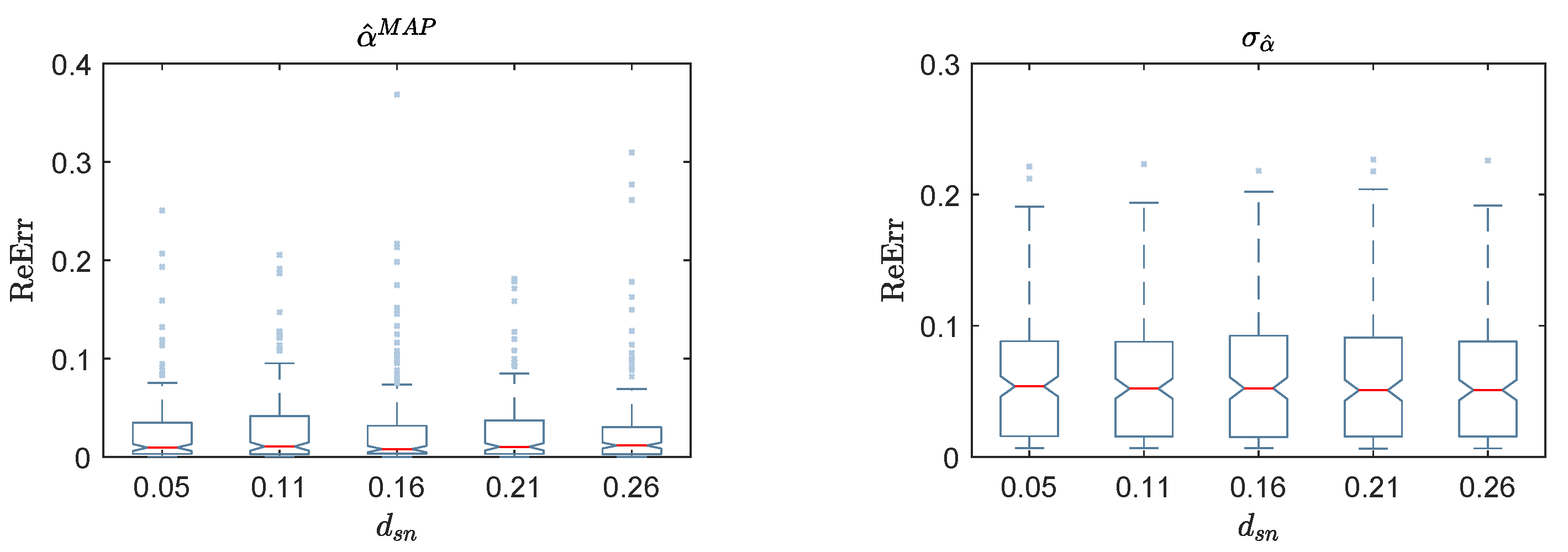
- The proposed damage features overcome the limitation of frequency-based damage identification methods available in the literature, which are valid to detect damage in structures to Level 1 only. It is enough to use the changes of the eigenfrequencies of cantilever structures to identify possible local damage at Level 3, i.e., to cover processes of damage detection, localization, and quantification. The FDI algorithm identified the damage with relatively small errors, even at a high noise level. Furthermore, the measurements needed to apply the proposed algorithm in practice which can be retrieved using fewer accelerometers compared with other available approaches described in the literature.
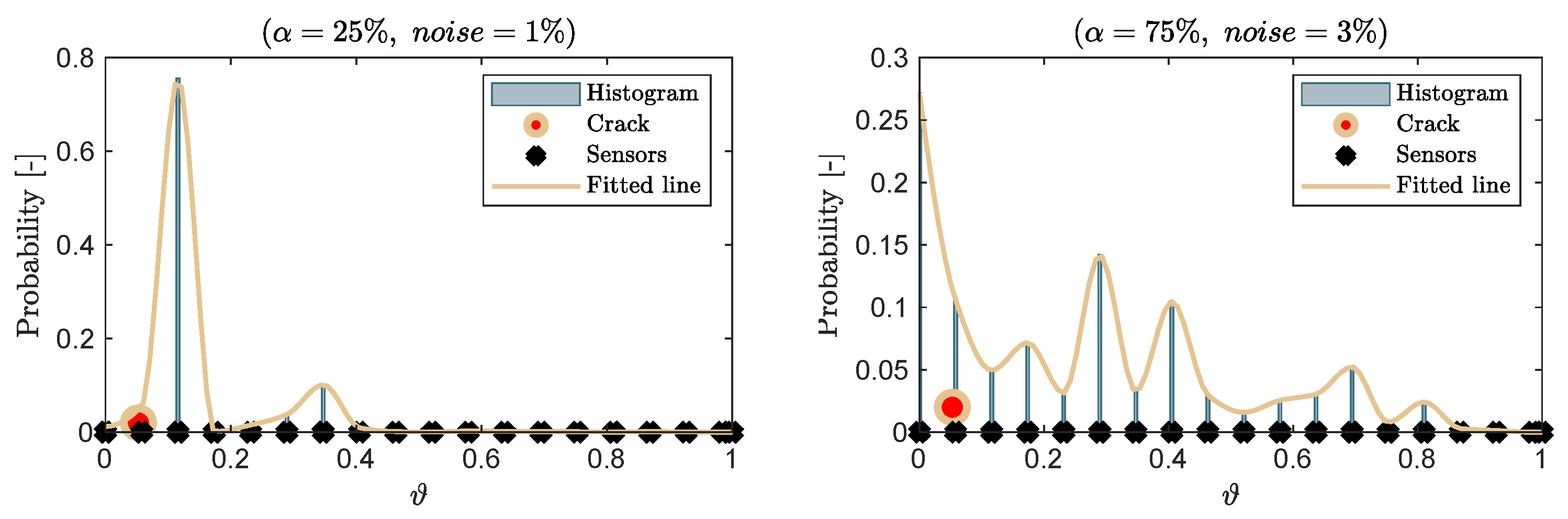
- Using the modal curvatures as a damage feature is very efficient for damage localization. This is shown from the results of the proposed CDI algorithm, as it offered a higher probability to the points around the damage location. Implementing this algorithm in practical cases needs more sensors (for example, at least four sensors) compared to the FDI algorithm, which might make it an unfeasible choice for the vast number of structures, as in catenary poles. However, the algorithm presented a significant accuracy, which made it a suitable prior to localizing the damage, even with a high noise level when a sufficient number of sensors are available.
- Bayesian inference is the suitable approach in this instance, despite its heavy computations. Different data can be utilized, and at the same time, the uncertainty of different parameters can be considered. Furthermore, the Bayesian inference simplifies the implementation data fusion concept in merging the informative data from multiple sources and methods. This approach increases the quality and accuracy of the expected results, for example, when used in the proposed FDI and CDI algorithms, to fuse the damage features from several measurements. Another benefit of using the Bayesian inference is quantifying the uncertainty of results caused by different sources of data and methods without additional efforts.
- Applying the proposed approach looks very promising when applied to other types of cantilever structures, such as the poles supported the power transmission lines, antenna masts, chimneys, and wind turbines. In addition, the proposed approach needs to be applied in practice for damage identification on real structures. Efforts should be made in this direction.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CDI | Curvature-Based Damage Identification |
| DD | Damage Detection |
| FDI | Frequency-Based Damage Identification |
| FEM | Finite Element Method |
| MAP | Maximum A Posteriori |
| MCMC | Markov Chain Monte Carlo |
| MLE | Maximum Likelihood Estimator |
| Probability Distribution Function | |
| ReErr | Reconstructed Error |
| SHM | Structural Health Monitoring |
| SI | System Identification |
| SSI | Stochastic Subspace Identification |
| UQ | Uncertainty Quantification |
References
- Farrar, C.R.; Worden, K. Structural Health Monitoring: A Machine Learning Perspective; John Wiley & Sons: Hoboken, NJ, USA, 2012. [Google Scholar] [CrossRef]
- Goulet, J.A.; Der Kiureghian, A.; Li, B. Pre-posterior optimization of sequence of measurement and intervention actions under structural reliability constraint. Struct. Saf. 2015, 52, 1–9. [Google Scholar] [CrossRef][Green Version]
- Song, G.; Wang, C.; Wang, B. Structural Health Monitoring (SHM) of Civil Structures; Multidisciplinary Digital Publishing Institute: Basel, Switzerland, 2017. [Google Scholar] [CrossRef]
- Zona, A. Vision-Based Vibration Monitoring of Structures and Infrastructures: An Overview of Recent Applications. Infrastructures 2021, 6, 4. [Google Scholar] [CrossRef]
- Doebling, S.; Farrar, C.; Prime, M.; Shevitz, D. Damage Identification and Health Monitoring of Structural and Mechanical Systems from Changes in Their Vibration Characteristics: A Literature Review. 1996. Available online: https://www.osti.gov/biblio/249299-damage-identification-health-monitoring-structural-mechanical-systems-from-changes-vibration-characteristics-literature-review (accessed on 21 March 2020). [CrossRef]
- Yan, J.X.; Liu, C.S.; Liu, T.Z.; Zhao, L.L. A review on advances of damage identification methods based on vibration. In Key Engineering Materials; Trans Tech Publications Ltd.: Stafa-Zurich, Switzerland, 2009; Volume 413, pp. 277–283. [Google Scholar] [CrossRef]
- An, Y.; Chatzi, E.; Sim, S.H.; Laflamme, S.; Blachowski, B.; Ou, J. Recent progress and future trends on damage identification methods for bridge structures. Struct. Control Health Monit. 2019, 26, e2416. [Google Scholar] [CrossRef]
- Rodgers, J.; Thomas, E. Prestressed Concrete Poles: State-of-the-Art. PCI J. 1984, 29, 52–103. [Google Scholar] [CrossRef]
- Fam, A. Development of a novel pole using spun-cast concrete inside glass-fiber-reinforced polymer tubes. PCI J. 2008, 53, 100–113. [Google Scholar] [CrossRef]
- Oliphant, W.J.; Sherman, D.C. Prestressed Concrete Transmission Pole Structures; American Society of Civil Engineers: Reston, VA, USA, 2012. [Google Scholar] [CrossRef]
- Kuebler, M.E. Torsion in Helically Reinforced Prestressed Concrete Poles. Master’s Thesis, University of Waterloo, Waterloo, ON, Canada, 2008. [Google Scholar]
- Kuebler, M.; Polak, M.A. Torsion tests on spun-cast prestressed concrete poles. PCI J. 2012, 57, 120–141. [Google Scholar] [CrossRef]
- PCI Committee on Prestressed Concrete Poles. Guide for the Design of Prestressed Concrete Poles. PCI J. 1997, 42, 94–137. [Google Scholar]
- DIN EN 12843:2004-11. Precast Concrete Products—Masts and Poles; German Version EN 12843:2004; Deutsche Institut für Normung e.V.: Berlin, Germany, 2004. [Google Scholar]
- Fouad, F.H.; Scott, N.L.; Calvert, E.; Donovan, M. Performance of spun prestressed concrete poles during Hurricane Andrew. PCI J. 1994, 39, 102–110. [Google Scholar] [CrossRef]
- Ibrahim, A.M. Behaviour of Pre-stressed Concrete Transmission Poles under High Intensity Wind. Ph.D. Thesis, University of Western Ontario, London, ON, Canada, 2017. [Google Scholar]
- Dilger, W.H.; Ghali, A.; Mohan Rao, S. Improving Durability And Performance Of Spun-Cast Concrete Poles. PCI J. 1996, 41, 68–90. [Google Scholar] [CrossRef]
- Remitz, J.; Wichert, M.; Empelmann, M. Ultra-High Performance Spun Concrete Poles—Part I: Load-bearing behaviour. In Proceedings of the HPC/CIC, Tromsö, Norway, 6–8 March 2017; p. 54. [Google Scholar]
- Wichert, M.; Remitz, J.; Empelmann, M. Ultra-High Performance Spun Concrete Poles—Part II: Tests on Grouted Pole Joints. In Proceedings of the HPC/CIC, Tromsö, Norway, 6–8 March 2017; p. 54. [Google Scholar]
- Chen, S.; Ong, C.K.; Antonsson, K. Modal behaviors of spun-cast pre-stressed concrete pole structures. In Proceedings of the IMAC–XXIV, St. Louis, MO, USA, 30 January–2 February 2006; pp. 1831–1836. [Google Scholar]
- Chen, S.E.; Dai, K. Modal characteristics of two operating power transmission poles. Shock Vib. 2010, 17, 551–561. [Google Scholar] [CrossRef]
- Dai, K.; Chen, S.; Smith, D. Vibration analyses of electrical transmission spun-cast concrete poles for health monitoring. In Nondestructive Characterization for Composite Materials, Aerospace Engineering, Civil Infrastructure, and Homeland Security 2012; International Society for Optics and Photonics: San Diego, CA, USA, 2012; Volume 8347, p. 834702. [Google Scholar]
- Abedin, M.; Mehrabi, A.B. Novel Approaches for Fracture Detection in Steel Girder Bridges. Infrastructures 2021, 4, 42. [Google Scholar] [CrossRef]
- Chang, P.C.; Flatau, A.; Liu, S. Health monitoring of civil infrastructure. Struct. Health Monit. 2003, 2, 257–267. [Google Scholar] [CrossRef]
- Balageas, D.; Fritzen, C.P.; Güemes, A. Structural Health Monitoring; John Wiley & Sons: Hoboken, NJ, USA, 2010; Volume 90. [Google Scholar] [CrossRef]
- Tangirala, A.K. Principles of System Identification: Theory and Practice; CRC Press: Boca Raton, FL, USA, 2014. [Google Scholar]
- Rytter, A. Vibrational Based Inspection of Civil Engineering Structures. Ph.D. Thesis, University of Aalborg, Aalborg, Denmark, 1993; 206p. [Google Scholar]
- Rajan, G.; Prusty, B.G. Structural Health Monitoring of Composite Structures Using Fiber Optic Methods; CRC Press: Boca Raton, FL, USA, 2016. [Google Scholar]
- Giordano, P.F.; Quqa, S.; Limongelli, M.P. Statistical Approach for Vibration-Based Damage Localization in Civil Infrastructures Using Smart Sensor Networks. Infrastructures 2021, 6, 22. [Google Scholar] [CrossRef]
- Sohn, H.; Farrar, C.R.; Hemez, F.M.; Czarnecki, J.J. A Review of Structural Health Review of Structural Health Monitoring Literature 1996–2001. 2002. Available online: https://www.osti.gov/biblio/976152 (accessed on 21 March 2020).
- Doebling, S.W.; Farrar, C.R.; Prime, M.B. A summary review of vibration-based damage identification methods. Shock Vib. Dig. 1998, 30, 91–105. [Google Scholar] [CrossRef]
- Moughty, J.J.; Casas, J.R. A state of the art review of modal-based damage detection in bridges: Development, challenges, and solutions. Appl. Sci. 2017, 7, 510. [Google Scholar] [CrossRef]
- Avci, O.; Abdeljaber, O.; Kiranyaz, S.; Hussein, M.; Gabbouj, M.; Inman, D.J. A review of vibration-based damage detection in civil structures: From traditional methods to Machine Learning and Deep Learning applications. Mech. Syst. Signal Process. 2021, 147, 107077. [Google Scholar] [CrossRef]
- Reynders, E.; De Roeck, G. Vibration-based damage identification: The z24 bridge benchmark. Encycl. Earthq. Eng. 2014, 482, 1–8. [Google Scholar] [CrossRef]
- Sha, G.; Radzieński, M.; Cao, M.; Ostachowicz, W. A novel method for single and multiple damage detection in beams using relative natural frequency changes. Mech. Syst. Signal Process. 2019, 132, 335–352. [Google Scholar] [CrossRef]
- Chen, H.P.; Ni, Y.Q. Structural Health Monitoring of Large Civil Engineering Structures; Wiley Online Library: Hoboken, NJ, USA, 2018. [Google Scholar]
- Alkam, F.; Lahmer, T. On the quality of identified parameters of prestressed concrete catenary poles in existence of uncertainty using experimental measurements and differenterent optimization methods. In Proceedings of the 28th International Conference on Noise and Vibration Engineering, ISMA 2018 and 7th International Conference on Uncertainty in Structural Dynamics, USD 2018, Leuven, Belgium, 17–19 September 2018; Desmet, W., Pluymers, B., Moens, D., Rottiers, W., Eds.; KU Leuven-Departement Werktuigkunde: Leuven, Belgium, 2018; pp. 3913–3923. [Google Scholar]
- Bigoni, D.; Engsig-Karup, A. Uncertainty Quantification with Applications to Engineering Problems; DTU Compute: Kongens Lyngby, Denmark, 2014. [Google Scholar]
- Li, B. Uncertainty Quantification in Vibration-Based Structural Health Monitoring Using Bayesian Statistics. Ph.D. Thesis, UC Berkeley, Berkeley, CA, USA, 2016. [Google Scholar]
- Simoen, E.; Lombaert, G. Bayesian Parameter Estimation. In Identification Methods for Structural Health Monitoring; Chatzi, E., Papadimitriou, C., Eds.; Springer: Cham, Switzerland, 2016; pp. 89–115. [Google Scholar] [CrossRef]
- Feng, Z.; Lin, Y.; Wang, W.; Hua, X.; Chen, Z. Probabilistic Updating of Structural Models for Damage Assessment Using Approximate Bayesian Computation. Sensors 2020, 20, 3197. [Google Scholar] [CrossRef]
- Au, S.K. Bayesian Operational Modal Analysis. In Identification Methods for Structural Health Monitoring; Chatzi, E., Papadimitriou, C., Eds.; Springer: Cham, Switzerland, 2016; pp. 117–135. [Google Scholar] [CrossRef]
- Chiachio, M.; Beck, J.L.; Chiachio, J.; Rus, G. Approximate Bayesian Computation by Subset Simulation. SIAM J. Sci. Comput. 2014, 36, A1339–A1358. [Google Scholar] [CrossRef]
- Vanik, M.W.; Beck, J.L.; Au, S.K. Bayesian probabilistic approach to structural health monitoring. J. Eng. Mech. 2000, 126, 738–745. [Google Scholar] [CrossRef]
- Papadimitriou, C. Bayesian Uncertainty Quantification and  Propagation: State-of-the-Art Tools for Linear and Nonlinear Structural Dynamics Models. In Identification Methods for Structural Health Monitoring; Chatzi, E., Papadimitriou, C., Eds.; Springer: Cham, Switzerland, 2016; pp. 137–170. [Google Scholar] [CrossRef]
- Ching, J.; Muto, M.; Beck, J.L. Structural model updating and health monitoring with incomplete modal data using Gibbs sampler. Comput. Aided Civ. Infrastruct. Eng. 2006, 21, 242–257. [Google Scholar] [CrossRef]
- Simoen, E.; Papadimitriou, C.; Lombaert, G. On prediction error correlation in Bayesian model updating. J. Sound Vib. 2013, 332, 4136–4152. [Google Scholar] [CrossRef]
- Huang, Y.; Shao, C.; Wu, B.; Beck, J.L.; Li, H. State-of-the-art review on Bayesian inference in structural system identification and damage assessment. Adv. Struct. Eng. 2019, 22, 1329–1351. [Google Scholar] [CrossRef]
- Liggins, M., II; Hall, D.; Llinas, J. Handbook of Multisensor Data Fusion: Theory and Practice; CRC Press: Boca Raton, FL, USA, 2001. [Google Scholar]
- Raol, J.R. Multi-Sensor Data Fusion with MATLAB; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Smyth, A.W.; Kontoroupi, T.; Brewick, P.T. Efficient Data Fusion and Practical Considerations for Structural Identification. In Identification Methods for Structural Health Monitoring; Chatzi, E., Papadimitriou, C., Eds.; Springer: Cham, Switzerland, 2016; pp. 35–49. [Google Scholar] [CrossRef]
- Guo, H. Structural damage detection using information fusion technique. Mech. Syst. Signal Process. 2006, 20, 1173–1188. [Google Scholar] [CrossRef]
- Bao, Y.; Xia, Y.; Li, H.; Xu, Y.L.; Zhang, P. Data fusion-based structural damage detection under varying temperature conditions. Int. J. Struct. Stab. Dyn. 2012, 12, 1250052. [Google Scholar] [CrossRef]
- Sha, G.; Cao, M.; Xu, W.; Novák, D. Structural damage identification using multiple mode fusion curvature mode shape method. Structural Health Monitoring and Integrity Management. In Proceedings of the 2nd International Conference of Structural Health Monitoring and Integrity Management (ICSHMIM 2014), Nanjing, China, 24–26 September 2014; CRC Press: Boca Raton, FL, USA, 2015; p. 163. [Google Scholar]
- Aster, R.C.; Borchers, B.; Thurber, C.H. Parameter Estimation and Inverse Problems, 2nd ed.; Academic Press: Cambridge, MA, USA, 2013. [Google Scholar] [CrossRef]
- Dashti, M.; Stuart, A.M. The Bayesian Approach to Inverse Problems. In Handbook of Uncertainty Quantification; Ghanem, R., Higdon, D., Owhadi, H., Eds.; Springer: Cham, Switzerland, 2017; pp. 311–428. [Google Scholar] [CrossRef]
- Tarantola, A. Inverse Problem Theory and Methods for Model Parameter Estimation; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2005. [Google Scholar] [CrossRef]
- Alkam, F.; Pereira, I.; Lahmer, T. Qualitatively-improved identified parameters of prestressed concrete catenary poles using sensitivity-based Bayesian approach. Results Eng. 2020, 6, 100104. [Google Scholar] [CrossRef]
- Alkam, F.; Lahmer, T. Quantifying the Uncertainty of Identificationed Parameters of Prestressed Concrete Poles Using the Experimental Measurements and Different Optimization Methods. Eng. Appl. Sci. 2019, 4, 84. [Google Scholar] [CrossRef]
- Göbel, L.; Mucha, F.; Jaouadi, Z.; Kavrakov, I.; Legatiuk, D.; Abrahamczyk, L.; Kraus, M.; Smarsly, K. Monitoring the Structural Response of Reinforced Concrete Poles Along High-Speed Railway Tracks. In Proceedings of the International RILEM Conference on Materials, Systems and Structures in Civil Engineering—Conference Segment on Reliability, Lyngby, Denmark, 15–29 August 2016; Technical University of Denmark Lyngby: Lynby, Denmark, 2016; pp. 1–10. [Google Scholar]
- Batikha, M.; Alkam, F. The Effect of Mechanical Properties of Masonry on the behavior of FRP-strengthened Masonry-infilled RC Frame under Cyclic Load. Compos. Struct. 2015, 134, 513–522. [Google Scholar] [CrossRef]
- Alkam, F.; Lahmer, T. Solving Non-Uniqueness Issues in Parameter Identification problems for Pre-stressed Concrete Poles by Multiple Bayesian updating. In Proceedings of the 15th International Probabilistic Workshop & 10th Dresdner Probabilistik Workshop, Dresden, Germany, 27–29 September 2017; Voigt, M.P., Ed.; TUD Press: Dresden, Germany, 2017; pp. 303–315. [Google Scholar]
- Goulet, J.A. Probabilistic Machine Learning for Civil Engineers; MIT Press: Cambridge, MA, USA, 2020. [Google Scholar]
- Reichert, I.; Olney, P.; Lahmer, T. Influence of the error description on model-based design of experiments. Eng. Struct. 2019, 193, 100–109. [Google Scholar] [CrossRef]
- Gelman, A.; Carlin, J.B.; Stern, H.S.; Rubin, D.B. Bayesian Data Analysis, 3rd ed.; Chapman & Hall/CRC: Boca Raton, FL, USA, 2014; Volume 2. [Google Scholar]
- Kaipio, J.; Somersalo, E. Statistical and Computational Inverse Problems; Springer: Berlin/Heidelberg, Germany, 2006; Volume 160. [Google Scholar]
- Calvetti, D.; Somersalo, E. An Introduction to Bayesian Scientific Computing: Ten Lectures on Subjective Computing; Springer: Berlin/Heidelberg, Germany, 2007; Volume 2. [Google Scholar] [CrossRef]
- Stuart, A.M. Inverse problems: A Bayesian perspective. Acta Numer. 2010, 19, 451–559. [Google Scholar] [CrossRef]
- Idier, J. Bayesian Approach to Inverse Problems; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- Bishop, C.M. Pattern Recognition and Machine Learning (Information Science and Statistics); Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Marzouk, Y.M.; Najm, H.N.; Rahn, L.A. Stochastic Spectral Methods for Efficient Bayesian Solution of Inverse Problems. J. Comput. Phys. 2007, 224, 560–586. [Google Scholar] [CrossRef]
- Bailer-Jones, C.A.L. Practical Bayesian Inference: A Primer for Physical Scientists; Cambridge University Press: Cambridge, UK, 2017. [Google Scholar] [CrossRef]
- Liggins, M.; Hall, D.; Llinas, J. Handbook of Multisensor Data Fusion: Theory and Practice, Second Edition; Electrical Engineering & Applied Signal Processing Series; Taylor & Francis: Abingdon, UK, 2008. [Google Scholar]
- Reynders, E.; Maes, K.; Lombaert, G.; De Roeck, G. Uncertainty quantification in operational modal analysis with stochastic subspace identification: Validation and applications. Mech. Syst. Signal Process. 2016, 66, 13–30. [Google Scholar] [CrossRef]
- Pandey, A.; Biswas, M.; Samman, M. Damage detection from changes in curvature mode shapes. J. Sound Vib. 1991, 145, 321–332. [Google Scholar] [CrossRef]
- Betz, W.; Papaioannou, I.; Straub, D. Transitional Markov Chain Monte Carlo: Observations and improvements. J. Eng. Mech. 2016, 142, 04016016. [Google Scholar] [CrossRef]
















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alkam, F.; Lahmer, T. Eigenfrequency-Based Bayesian Approach for Damage Identification in Catenary Poles. Infrastructures 2021, 6, 57. https://doi.org/10.3390/infrastructures6040057
Alkam F, Lahmer T. Eigenfrequency-Based Bayesian Approach for Damage Identification in Catenary Poles. Infrastructures. 2021; 6(4):57. https://doi.org/10.3390/infrastructures6040057
Chicago/Turabian StyleAlkam, Feras, and Tom Lahmer. 2021. "Eigenfrequency-Based Bayesian Approach for Damage Identification in Catenary Poles" Infrastructures 6, no. 4: 57. https://doi.org/10.3390/infrastructures6040057
APA StyleAlkam, F., & Lahmer, T. (2021). Eigenfrequency-Based Bayesian Approach for Damage Identification in Catenary Poles. Infrastructures, 6(4), 57. https://doi.org/10.3390/infrastructures6040057