A Comparative Study of Laser Doppler Vibrometers for Vibration Measurements on Pavement Materials

 ,
,  , ,
, , 
Abstract
1. Introduction
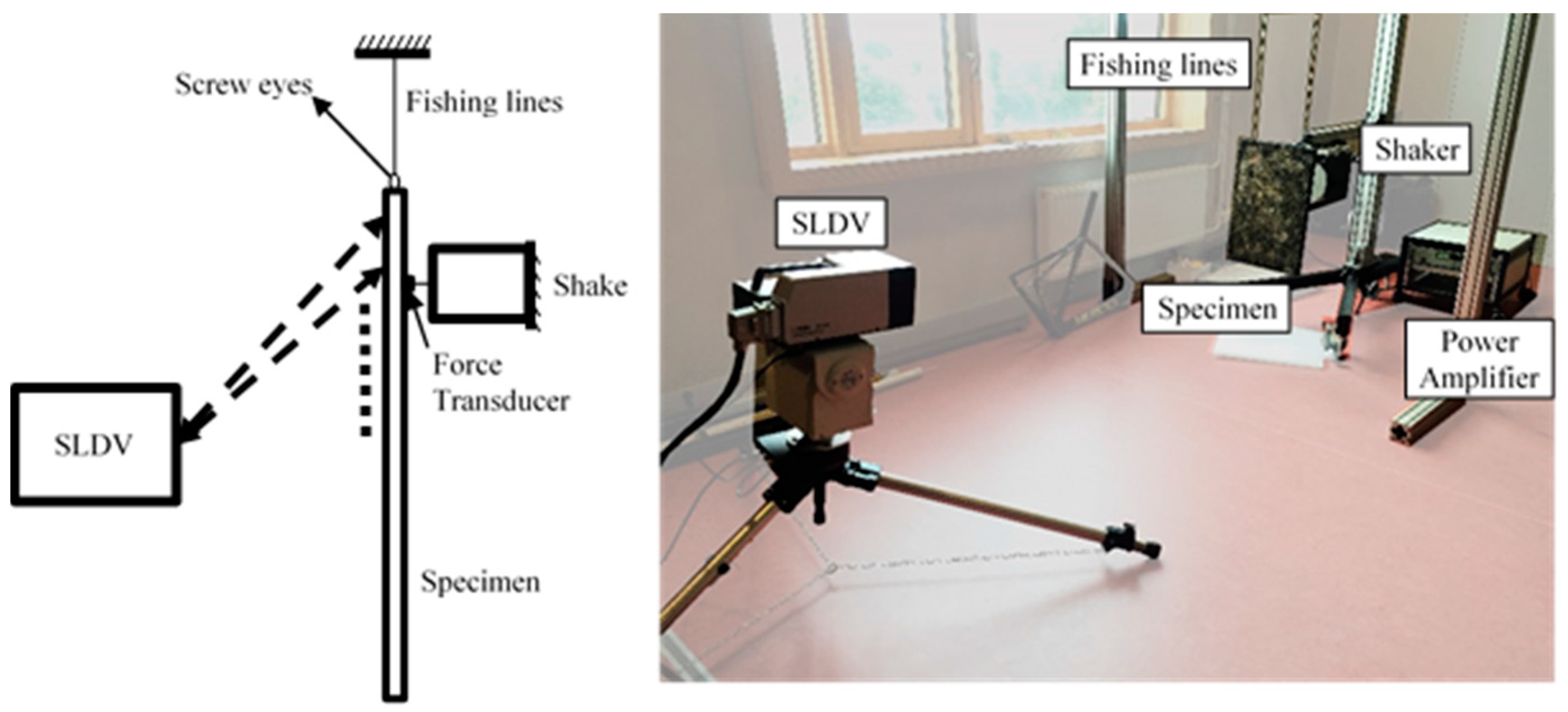
2. Materials and Methods
3. Results
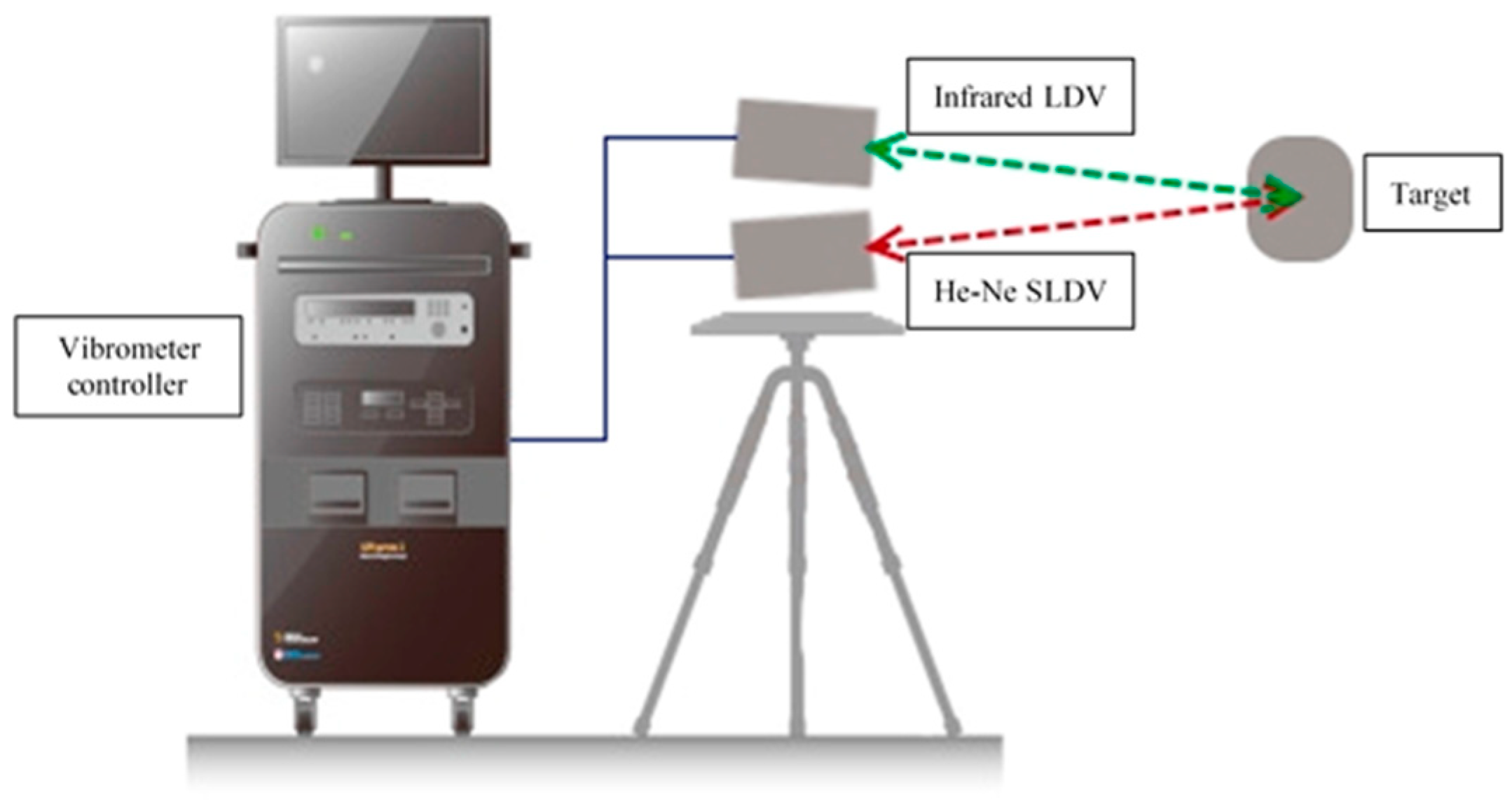
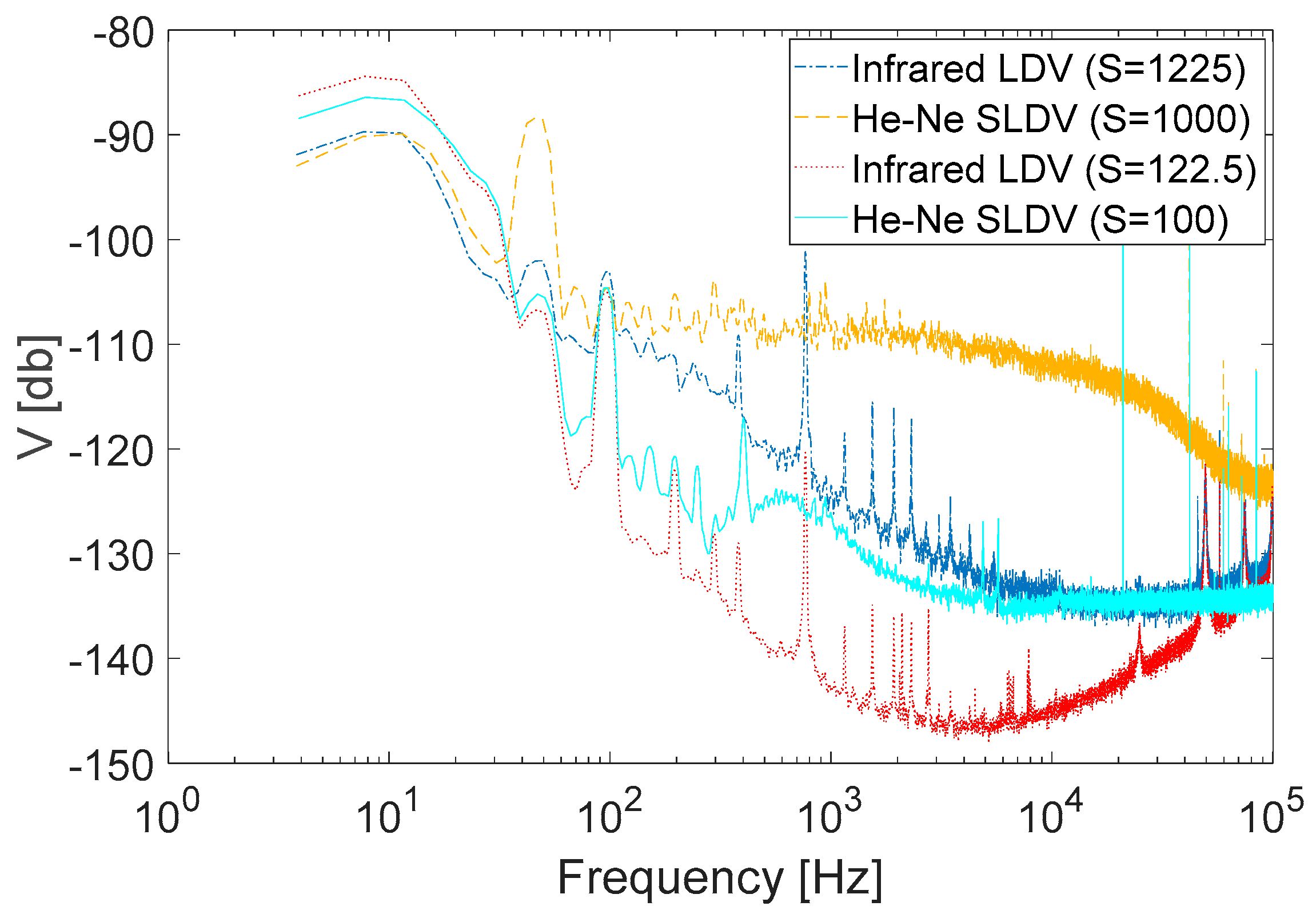
3.1. He–Ne vs. Infrared LDV
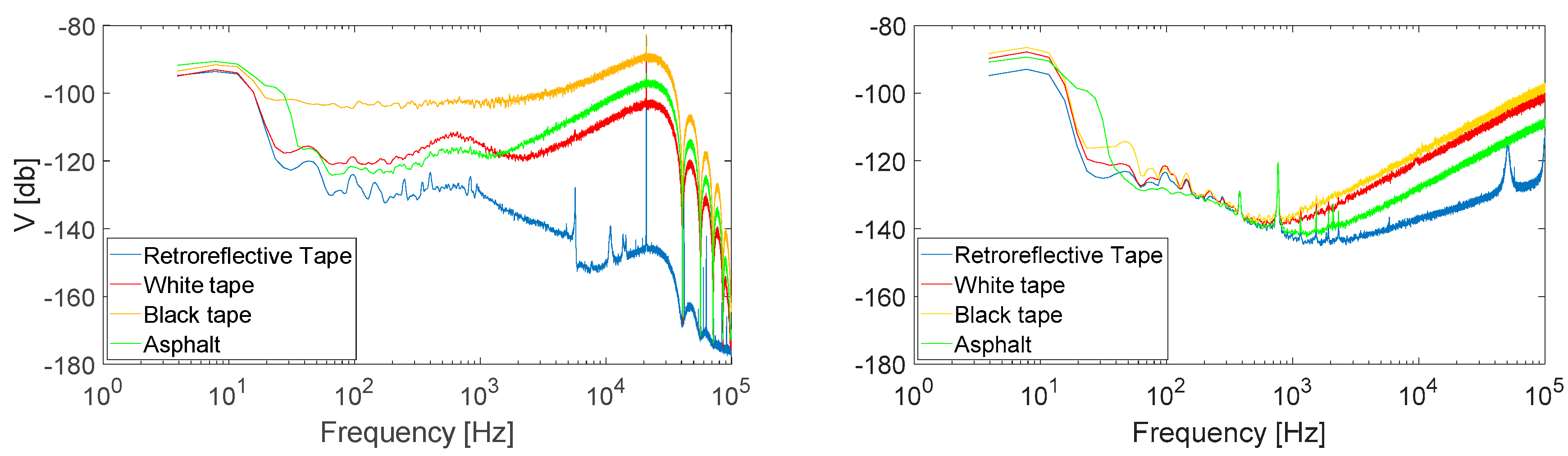
3.2. He–Ne vs. Infrared LDV on Different Surfaces
3.3. Modal Parameters with SLDV
3.4. He–Ne vs. Infrared SLDV for Modal Analysis on Pavement
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Varma, S.; Emin Kutay, M. Backcalculation of viscoelastic and nonlinear flexible pavement layer properties from falling weight deflections. Int. J. Pavement Eng. 2015, 1–15. [Google Scholar] [CrossRef]
- Elseifi, M.A.; Abdel-Khalek, A.M.; Gaspard, K.; Zhang, Z.; Ismail, S. Evaluation of Continuous Deflection Testing Using the Rolling Wheel Deflectometer in Louisiana. J. Transp. Eng. 2012, 138, 414–422. [Google Scholar] [CrossRef]
- Gudmarsson, A.; Ryden, N.; Di Benedetto, H.; Sauzeat, C. Complex modulus and complex Poisson’s ratio from cyclic and dynamic modal testing of asphalt concrete. Constr. Build. Mater. 2015, 88, 20–31. [Google Scholar] [CrossRef]
- He, L.; Lin, H.; Zou, Q.; Zhang, D. Accurate measurement of pavement deflection velocity under dynamic loads. Autom. Constr. 2017, 83, 149–162. [Google Scholar] [CrossRef]
- Flintsch, G.W.; Ferne, B.; Diefenderfer, B.; Brayce, J. Evaluation of Traffic Speed Continuous Deflection Devices. Transp. Res. Procedia 2012, 14, 3031–3039. [Google Scholar]
- Halliwell, N.A. Laser-Doppler measurement of vibrating surfaces: A portable instrument. J. Sound Vib. 1979, 62, 312–315. [Google Scholar] [CrossRef]
- Castellini, P.; Martarelli, M.; Tomasini, E.P. Laser Doppler Vibrometry: Development of advanced solutions answering to technology’s needs. Mech. Syst. Signal Process. 2006, 20, 1265–1285. [Google Scholar] [CrossRef]
- Rossi, G.; Marsili, R.; Gusella, V.; Gioffrè, M. Comparison between accelerometer and laser vibrometer to measure traffic excited vibrations on bridges. Shock Vib. 2002, 9, 11–18. [Google Scholar] [CrossRef]
- Stanbridge, A.B.; Ewins, D.J. Modal testing using a scanning laser Doppler vibrometer. Mech. Syst. Signal Process. 1999, 13, 255–270. [Google Scholar] [CrossRef]
- Martatelli, M.; Revel, G.M.; Santolini, C. Automated Modal Analysis By Scanning Laser Vibrometry: Problems and Uncertainties Associated With the Scanning System Calibration. Mech. Syst. Signal Process. 2001, 15, 581–601. [Google Scholar] [CrossRef]
- Hasheminejad, N.; Vuye, C.; Van den Bergh, W.; Dirckx, J.; Leysen, J.; Sels, S.; Vanlanduit, S. Identification of pavement material properties using a scanning laser Doppler vibrometer. In Proceedings of the 12th International A.I.VE.LA. Conference on Vibration Measurements by Laser and Noncontact Techniques, Ancona, Italy, 29 June–1 July 2016. [Google Scholar] [CrossRef]
- Rothberg, S.J.; Allen, M.S.; Castellini, P.; Di Maio, D.; Dirckx, J.J.J.; Ewins, D.J.; Halkon, B.J.; Muyshondt, P.; Paone, N.; Ryan, T.; et al. An international review of laser Doppler vibrometry: Making light work of vibration measurement. Opt. Lasers Eng. 2016. [Google Scholar] [CrossRef]
- Harland, A.R.; Petzing, J.N.; Tyrer, J.R.; Bickley, C.J.; Robinson, S.P.; Preston, R.C. Application and assessment of laser Doppler velocimetry for underwater acoustic measurements. J. Sound Vib. 2003, 265, 627–645. [Google Scholar] [CrossRef]
- Strean, R.F.; Mitchell, L.D.; Barker, A.J. Global noise characteristics of a laser Doppler vibrometer—I Theory. Opt. Lasers Eng. 1998, 30, 127–139. [Google Scholar] [CrossRef]
- Martin, P.; Rothberg, S. Introducing speckle noise maps for Laser Vibrometry. Opt. Lasers Eng. 2009, 47, 431–442. [Google Scholar] [CrossRef]
- Denman, M.; Halliwell, N.A.; Rothberg, S.J. Speckle noise reduction in laser vibrometry: Experimental and numerical optimisation. In Proceedings of the Second International Conference on Vibration Measurements by Laser Techniques: Advances and Applications, Ancona, Italy, 23–25 September 1996; Tomasini, E.P., Ed.; Volume 2868, pp. 12–21. [Google Scholar]
- Vuye, C.; Devroye, G.; Stuer, W.; Van Geen, G. Van; Van den bergh, W.; Bergiers, A.; Goubert, L.; Vanhooreweder, B.; Buytaert, A. Acoustical Characteristics of Low-Noise Test Tracks in Flanders. In Proceedings of the 22nd International Congress on Sound and Vibration, Florence, Italy, 12–16 July 2015. [Google Scholar]
- Vuye, C.; Bergiers, A.; Vanhooreweder, B. The Acoustical Durability of Thin Noise Reducing Asphalt Layers. Coatings 2016, 6, 21. [Google Scholar] [CrossRef]
- Vuye, C.; Musovic, F.; Tyszka, L.; Van Den, W.; Kampen, J.; Bergiers, A.; Maeck, J. First experiences with thin noise reducing asphalt layers in an urban environment in Belgium. In Proceedings of the ISMA 2016 Noise and Vibration Engineering Conference, Leuven, Belgium, 19–21 September 2016. [Google Scholar]
- Sandberg, U. Low noise road surfaces. A state-of-the-art review. J. Acoust. Soc. Jpn. 1999, 20, 1–17. [Google Scholar] [CrossRef]
- Vuye, C.; Devroye, G.; Stuer, W.; Van Beveren, M. Acoustical and Mechanical Impedance Measurements on PoroElastic Road Surfaces. In Proceedings of the 10th European Congress and Exposition on Noise Control Engineering, Maastricht, The Netherlands, 31 May–3 June 2015; pp. 1205–1210. [Google Scholar]
- Brown, E.R.; Haddock, J.E.; Mallick, R.; Lynn, T. A Development of a Mixture Design Procedure for Stone Matrix Asphalt. Proc. Assoc. Asph. Paving Technol. 1997, 66, 1–24. [Google Scholar]
- Guillaume, P.; Verboven, P.; Vanlanduit, S. Frequency-Domain Maximum Likelihood Identification of Modal Parameters with Confidence Intervals. In Proceedings of the International Seminar on Modal Analysis Katholieke Universiteit, Leuven, Belgium, 16–18 September 1998; Volume 1, pp. 359–366. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experiment | Test Number | Surface | Measurement System | Standoff Distance (m) |
|---|---|---|---|---|
| Noise Floor Measurements | 1 | Retroreflective tape | He–Ne SLDV and infrared LDV | 9 |
| 2 | White tape | He–Ne SLDV and infrared LDV | 9 | |
| 3 | Black tape | He–Ne SLDV and infrared LDV | 9 | |
| 4 | Asphalt concrete | He–Ne SLDV and infrared LDV | 1.7 |
| Experiment | Test Number | Specimen | Surface Condition | Measurement System |
|---|---|---|---|---|
| Part 1 | 1 | TAL | Unpainted | He–Ne SLDV |
| 2 | TAL | Painted | He–Ne SLDV | |
| 3 | PERS | Unpainted | He–Ne SLDV | |
| 4 | PERS | Painted | He–Ne SLDV | |
| 5 | SMA | Unpainted | He–Ne SLDV | |
| 6 | SMA | Painted | He–Ne SLDV | |
| Part 2 | 1 | TAL | Unpainted | He–Ne SLDV |
| 2 | TAL | Unpainted | 3D infrared SLDV | |
| 3 | PERS | Unpainted | He–Ne SLDV | |
| 4 | PERS | Unpainted | 3D infrared SLDV | |
| 5 | SMA | Unpainted | He–Ne SLDV | |
| 6 | SMA | Unpainted | 3D infrared SLDV |
| Mode | TAL | PERS | SMA | ||||||
|---|---|---|---|---|---|---|---|---|---|
| f (Hz) | D (%) | MAC | f (Hz) | D (%) | MAC | f (Hz) | − (%) | MAC | |
| Unpainted side | |||||||||
| 1 | 92.7 | 9.3 | 98.2 | 201.5 | 12.1 | 98.4 | |||
| 2 | 126.8 | 10.5 | 73.3 | 149.1 | 9.5 | 97.7 | 214.4 | 4.2 * | 93.0 |
| 3 | 311.1 | 10.9 | 92.5 | 250.5 | 10.2 | 96.3 | |||
| 4 | 337.2 | 9.0 | 90.7 | 493.1 | 8.6 | 94.1 | |||
| 5 | 378.5 | 8.8 | 86.4 | 454.1 | 9.3 | 90.0 | 567.7 | 12.1 | 93.3 |
| 6 | 457.9 | 8.3 | 90.1 | 497.9 | 10.3 | 92.6 | 663.2 | 8.9 | 92.2 |
| 7 | 561.5 | 8.7 | 95.1 | ||||||
| 8 | 673.8 | 8.1 | 90.9 | ||||||
| Painted side | |||||||||
| 1 | 93.8 | 9.4 | 99.4 | 203.0 | 12.1 | 93.1 | |||
| 2 | 125.9 | 10.5 | 76.4 | 151.1 | 9.8 | 99.1 | 215.8 | 9.8 | 86.9 |
| 3 | 311.3 | 8.1 | 96.6 | 255.3 | 10.4 | 98.6 | 456.1 | 8.9 | 91.1 |
| 4 | 337.1 | 8.8 | 91.9 | 314.5 | 10.0 | 97.7 | 493.4 | 8.5 | 75.9 |
| 5 | 378.9 | 8.9 | 85.1 | 439.2 | 1.3 * | 90.6 | 575.0 | 10.2 | 96.3 |
| 6 | 450.7 | 4.5 | 79.1 | 485.5 | 10.7 | 86.1 | 660.5 | 10.1 | 96.6 |
| 7 | 563.2 | 8.2 | 94.9 | 641.8 | 10.2 | 78.3 | |||
| 8 | 682.9 | 8.5 | 95.0 | ||||||
| Frequency (Hz) | Damping Ratio (%) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| He–Ne SLDV | Infrared 3D SLDV | He–Ne SLDV | Infrared 3D SLDV | ||||||||
| TAL | PERS | SMA | TAL | PERS | SMA | TAL | PERS | SMA | TAL | PERS | SMA |
| 92.7 | 201.5 | 90.5 | 188.7 | 9.2 | 12.1 | 9.5 | 12.9 | ||||
| 126.8 | 149.1 | 214.4 | 128.9 | 144.8 | 207.0 | 10.5 | 9.5 | 4.2 | 10.3 | 10.2 | 10.7 |
| 311.1 | 250.5 | 246.5 | 445.9 | 10.9 | 10.2 | 13.3 | 12.3 | ||||
| 337.2 | 493.1 | 337.6 | 302.3 | 484.3 | 9.0 | 8.6 | 8.5 | 9.7 | 9.9 | ||
| 378.5 | 454.4 | 567.7 | 382.2 | 450.6 | 589.9 | 8.8 | 9.3 | 12.1 | 9.4 | 11.0 | 11.6 |
| 457.9 | 497.9 | 663.2 | 459.1 | 651.7 | 8.3 | 10.3 | 8.9 | 9.1 | 7.6 | ||
| 561.5 | 574.2 | 830.2 | 8.7 | 7.6 | 9.7 | ||||||
| 673.8 | 676.0 | 641.5 | 964.4 | 8.1 | 8.0 | 11.1 | 10.6 | ||||
| 770.9 | 7.6 | ||||||||||
| 923.7 | 8.9 | ||||||||||
| 969.8 | 8.7 | ||||||||||
| 1044.9 | 10.2 | ||||||||||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hasheminejad, N.; Vuye, C.; Van den bergh, W.; Dirckx, J.; Vanlanduit, S. A Comparative Study of Laser Doppler Vibrometers for Vibration Measurements on Pavement Materials. Infrastructures 2018, 3, 47. https://doi.org/10.3390/infrastructures3040047
Hasheminejad N, Vuye C, Van den bergh W, Dirckx J, Vanlanduit S. A Comparative Study of Laser Doppler Vibrometers for Vibration Measurements on Pavement Materials. Infrastructures. 2018; 3(4):47. https://doi.org/10.3390/infrastructures3040047
Chicago/Turabian StyleHasheminejad, Navid, Cedric Vuye, Wim Van den bergh, Joris Dirckx, and Steve Vanlanduit. 2018. "A Comparative Study of Laser Doppler Vibrometers for Vibration Measurements on Pavement Materials" Infrastructures 3, no. 4: 47. https://doi.org/10.3390/infrastructures3040047
APA StyleHasheminejad, N., Vuye, C., Van den bergh, W., Dirckx, J., & Vanlanduit, S. (2018). A Comparative Study of Laser Doppler Vibrometers for Vibration Measurements on Pavement Materials. Infrastructures, 3(4), 47. https://doi.org/10.3390/infrastructures3040047