
The Potential of Active Contour Models in Extracting Road Edges from Mobile Laser Scanning Data


Abstract
:1. Introduction
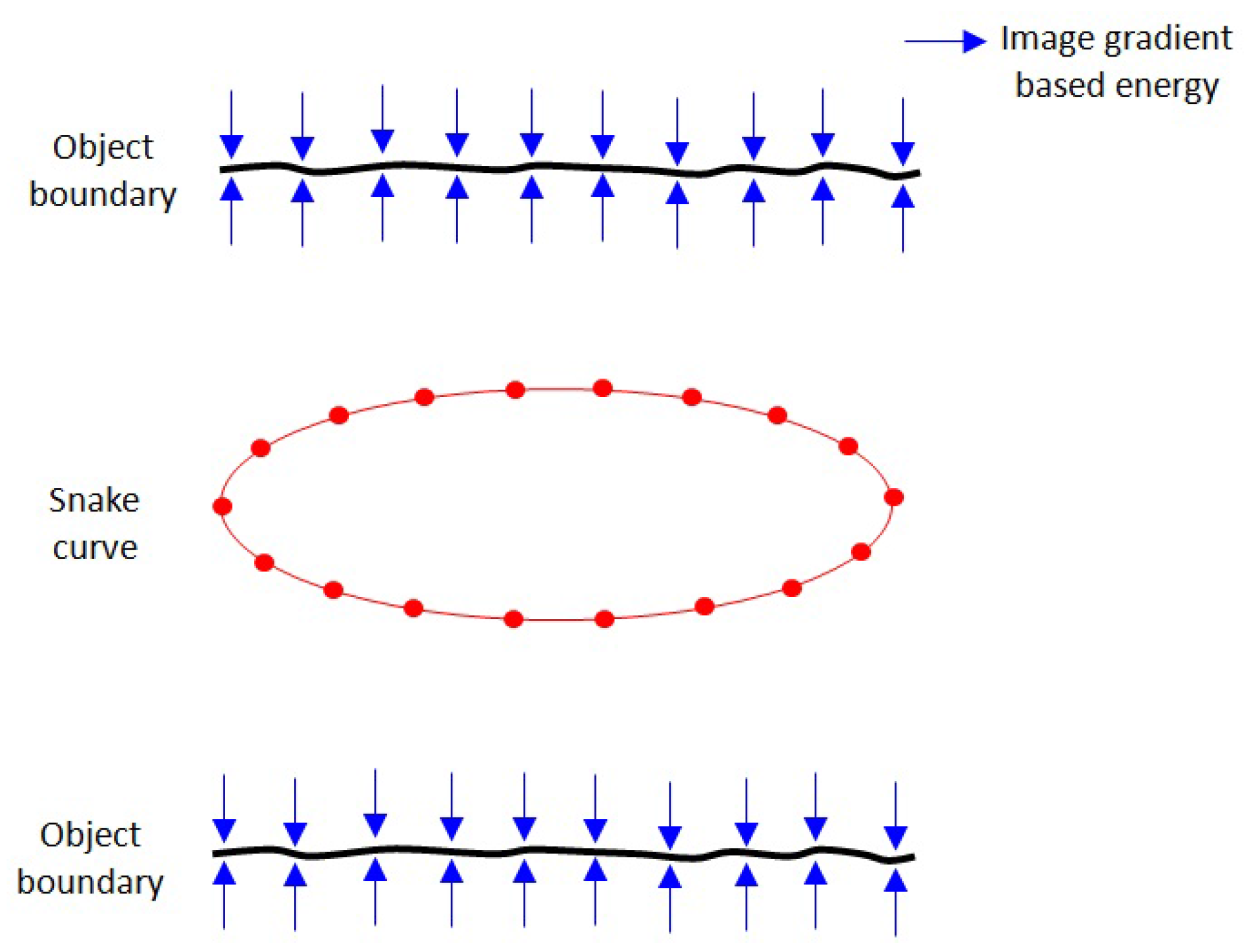
2. Active Contour Models
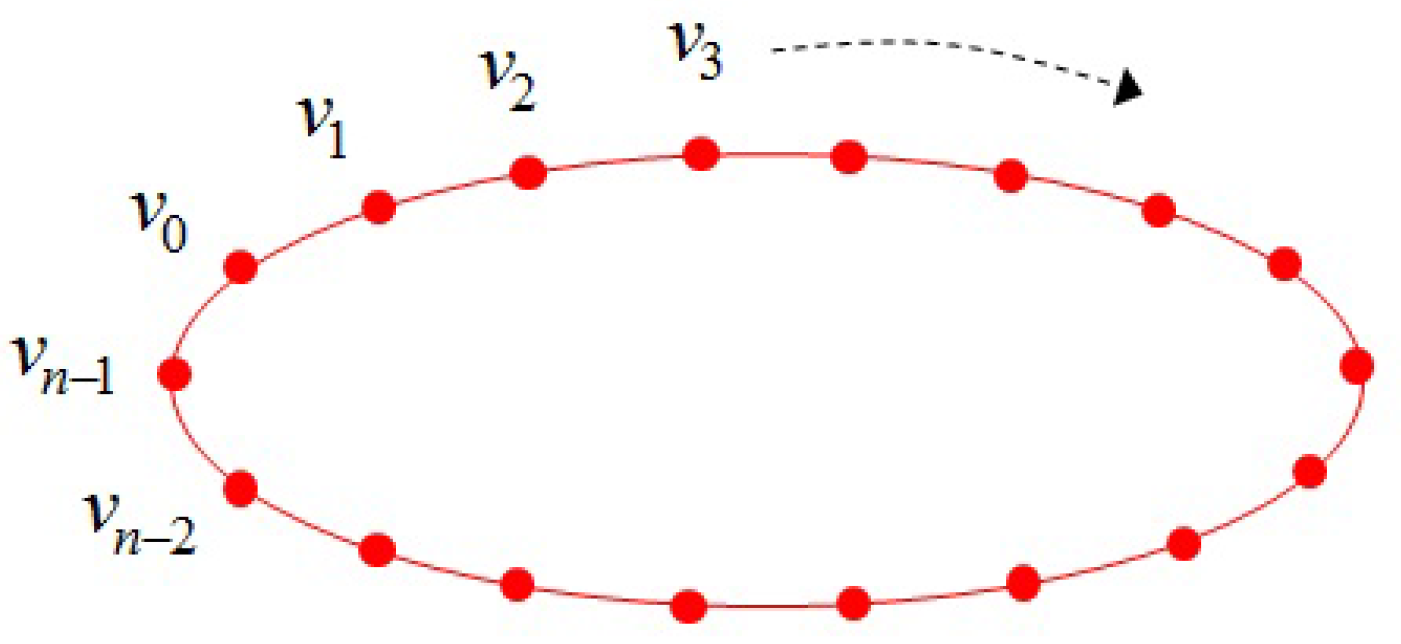
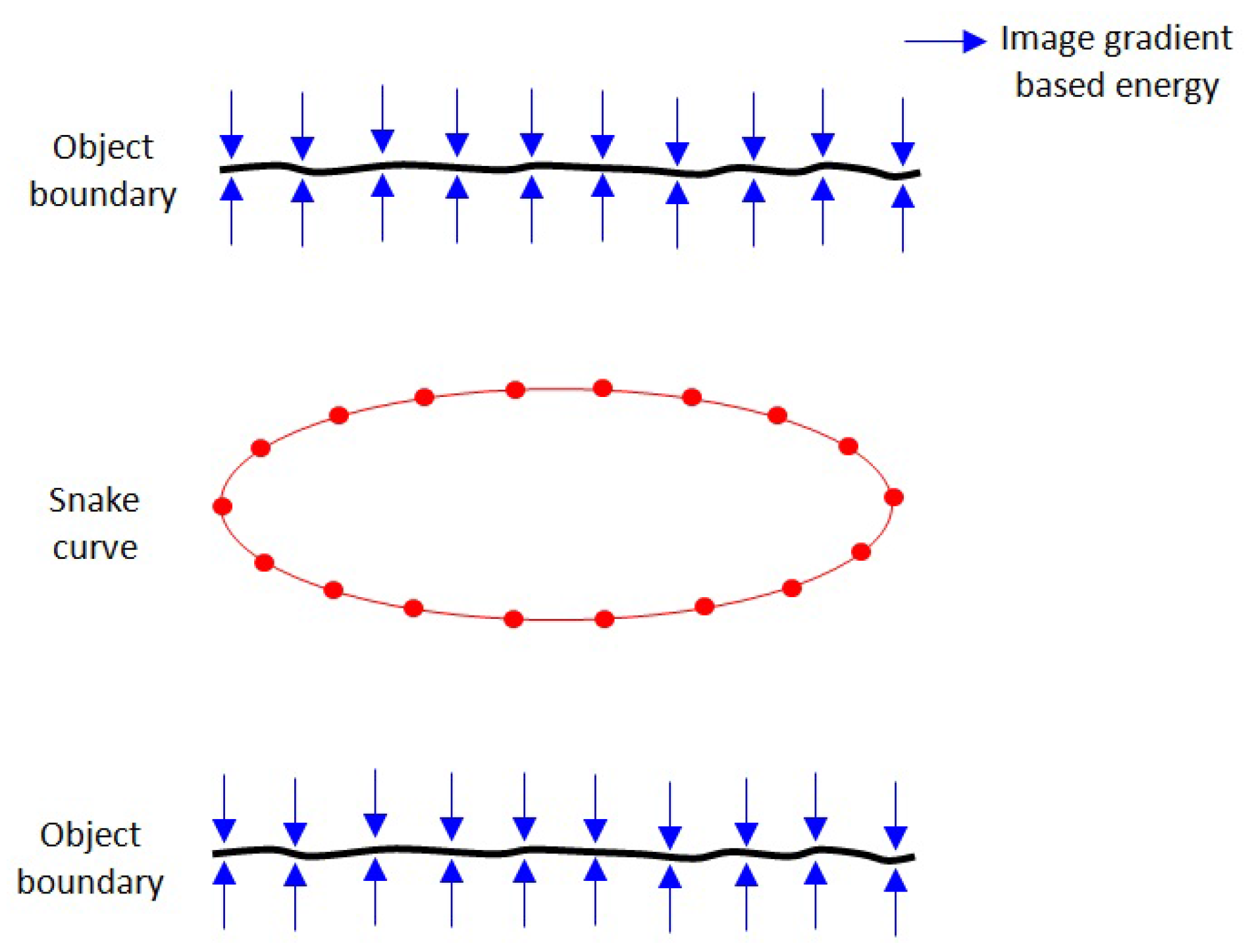
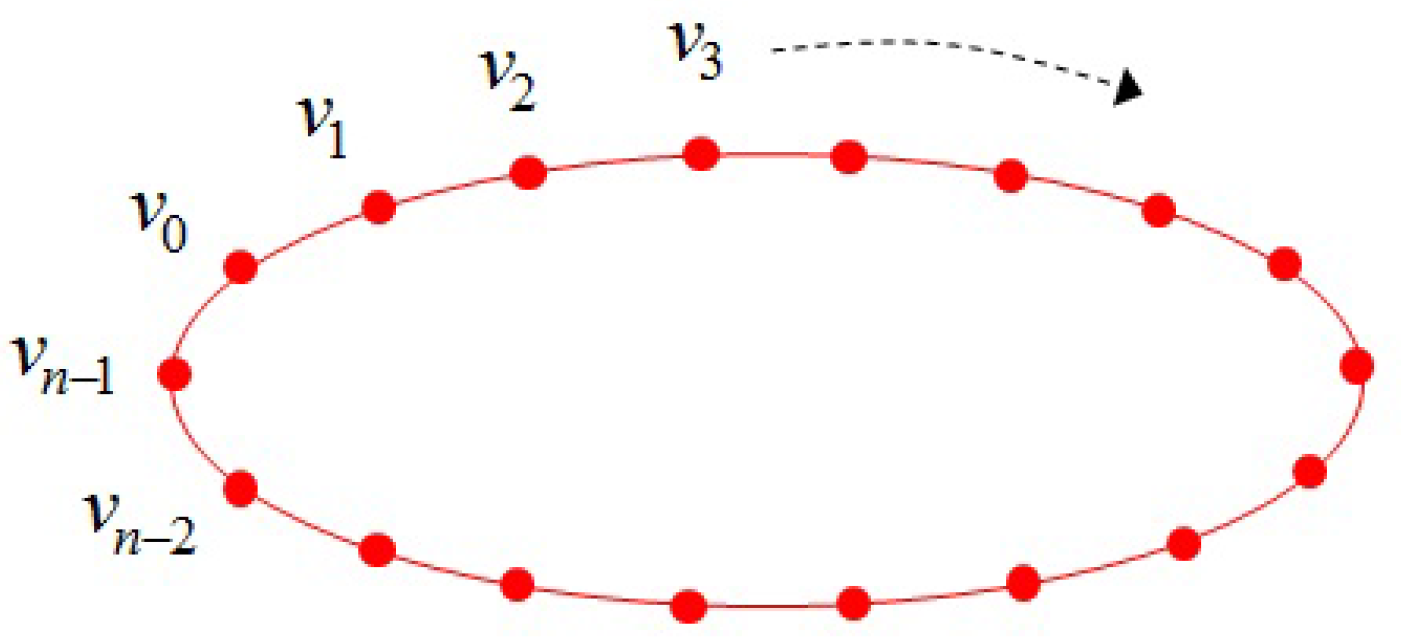
2.1. Parametric Active Contour Model
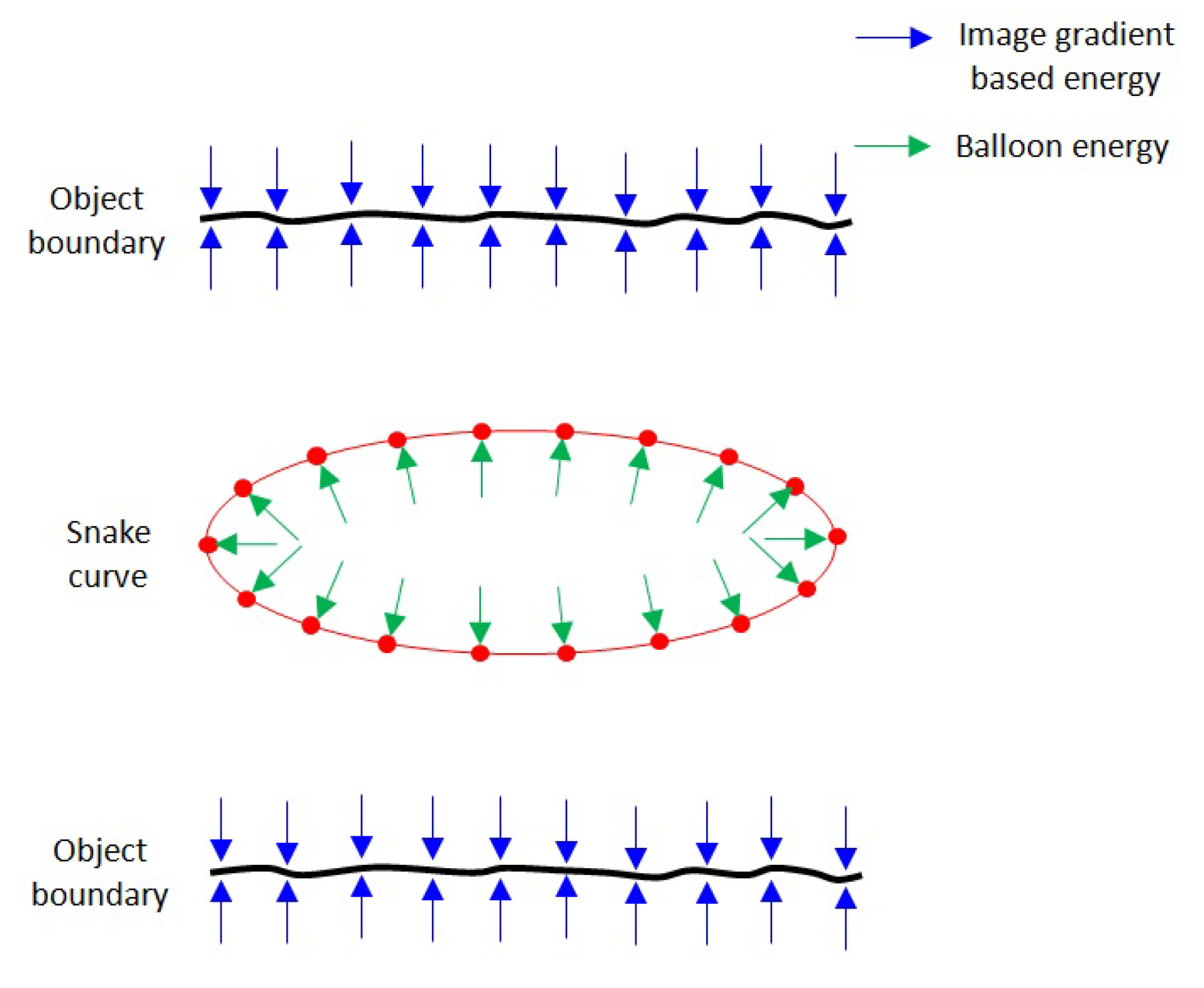
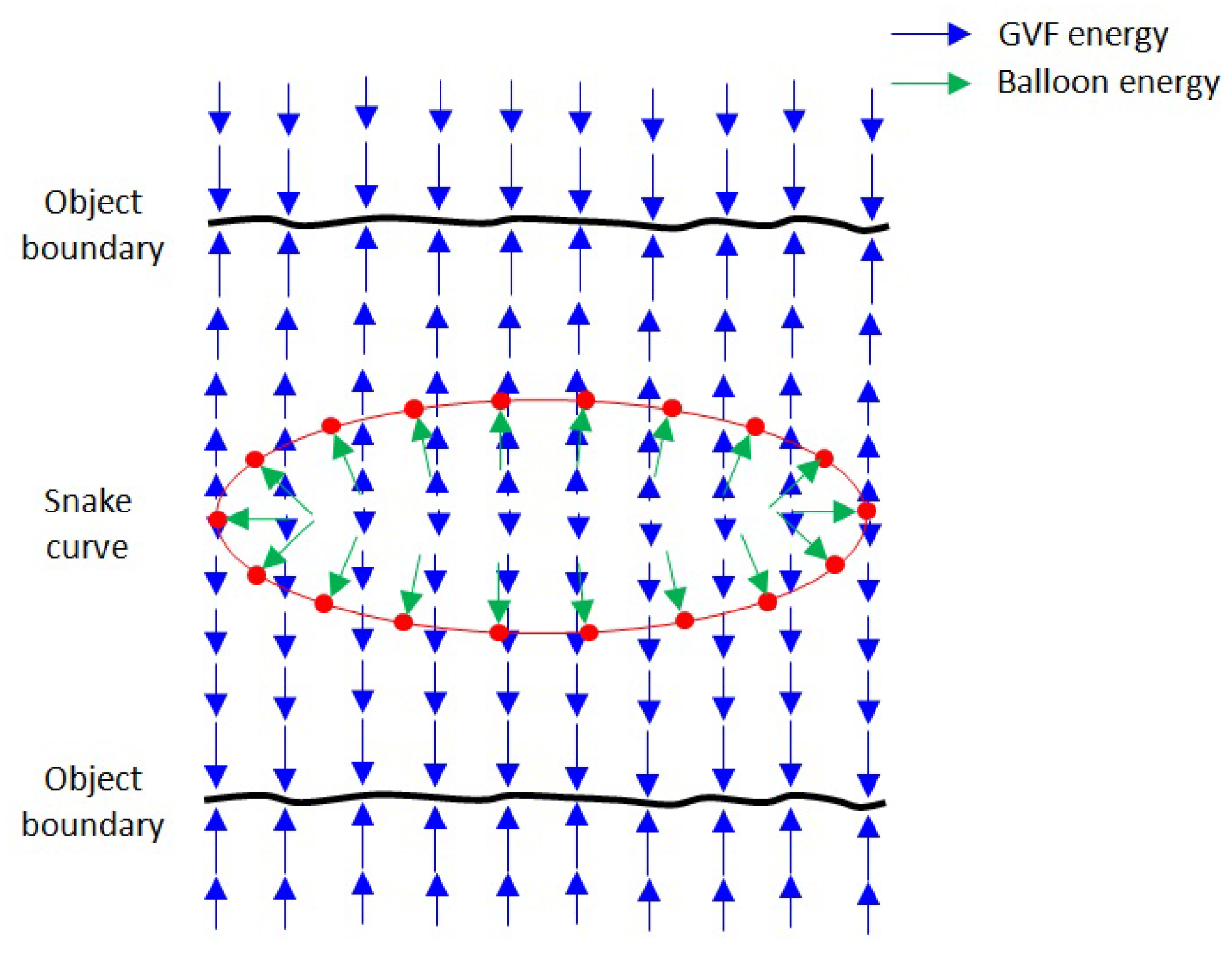
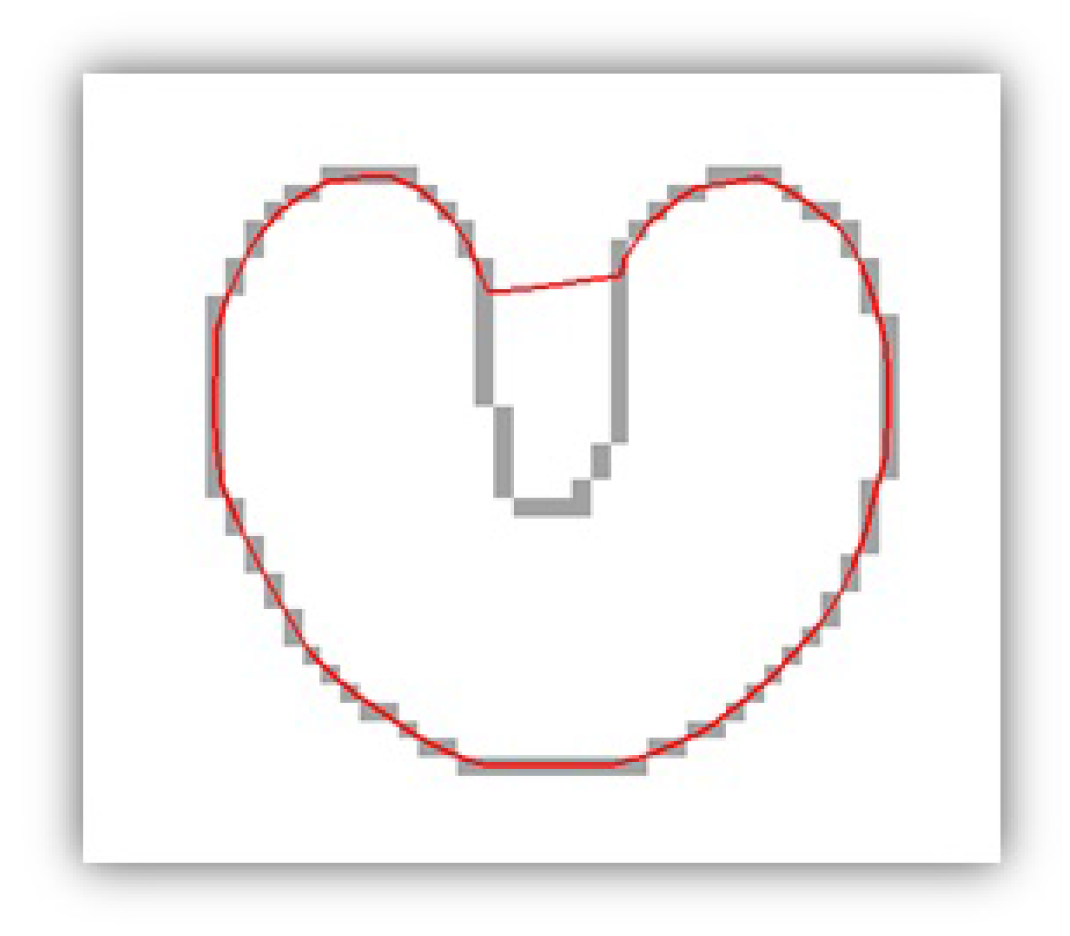
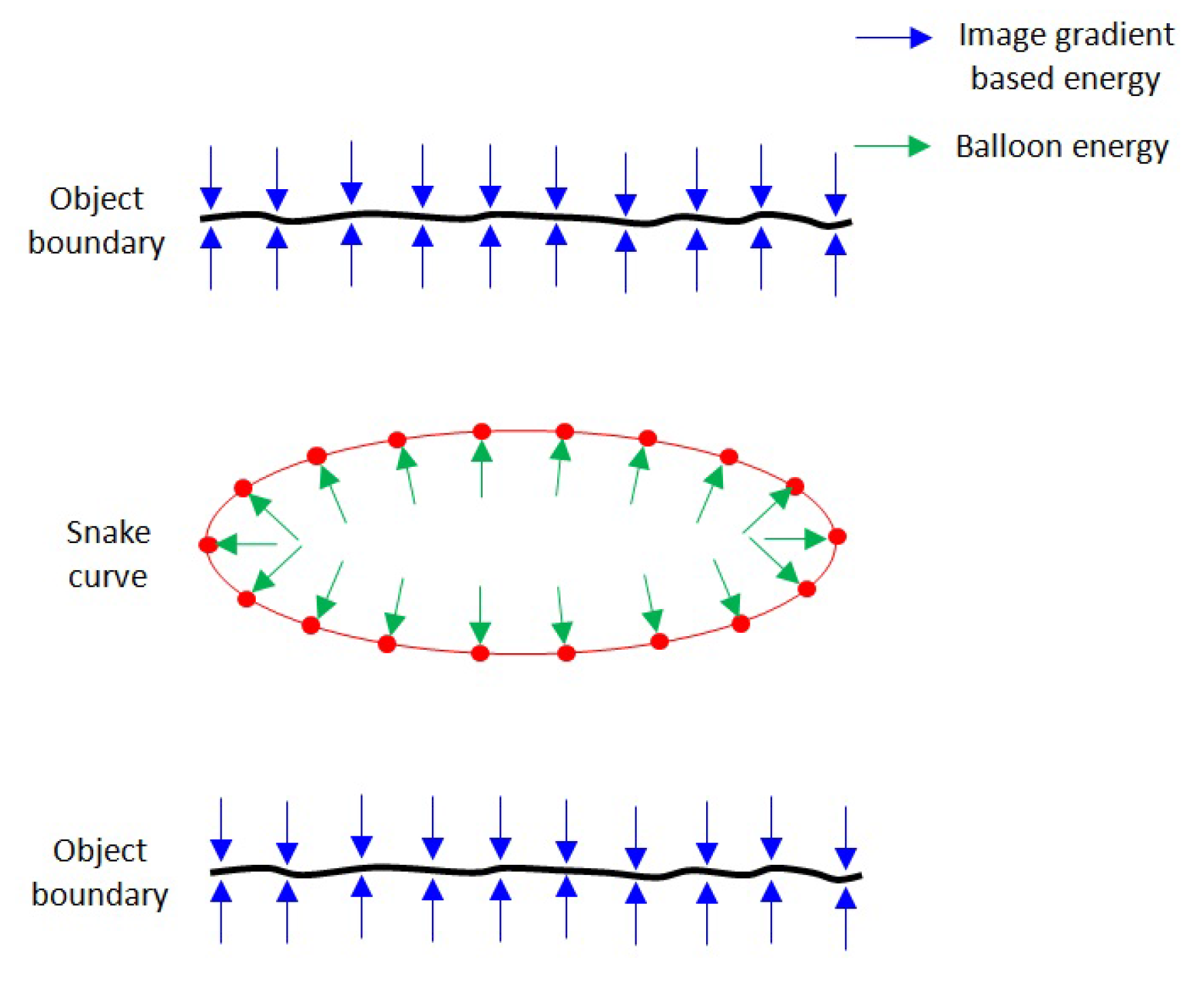
2.1.1. Balloon Model
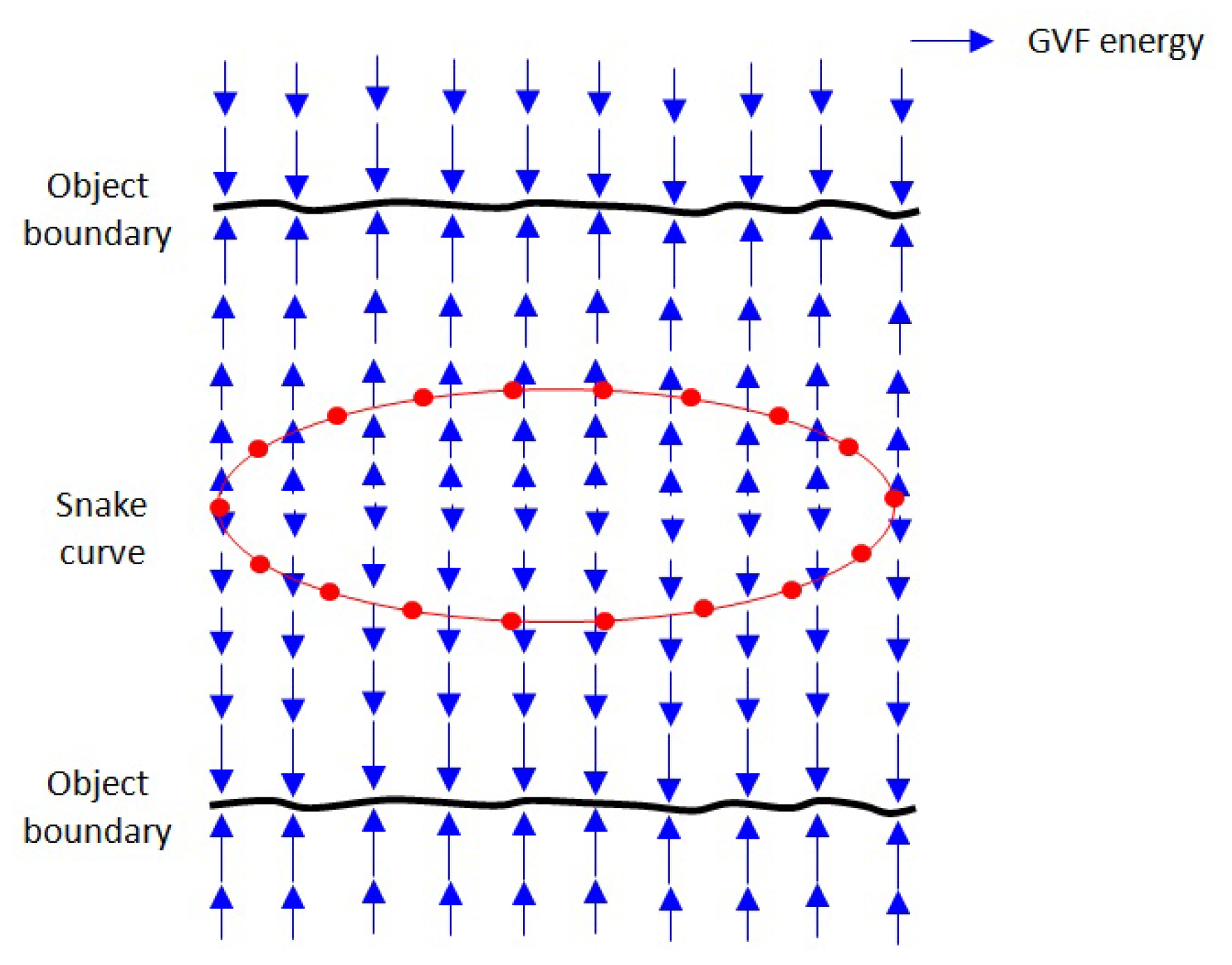
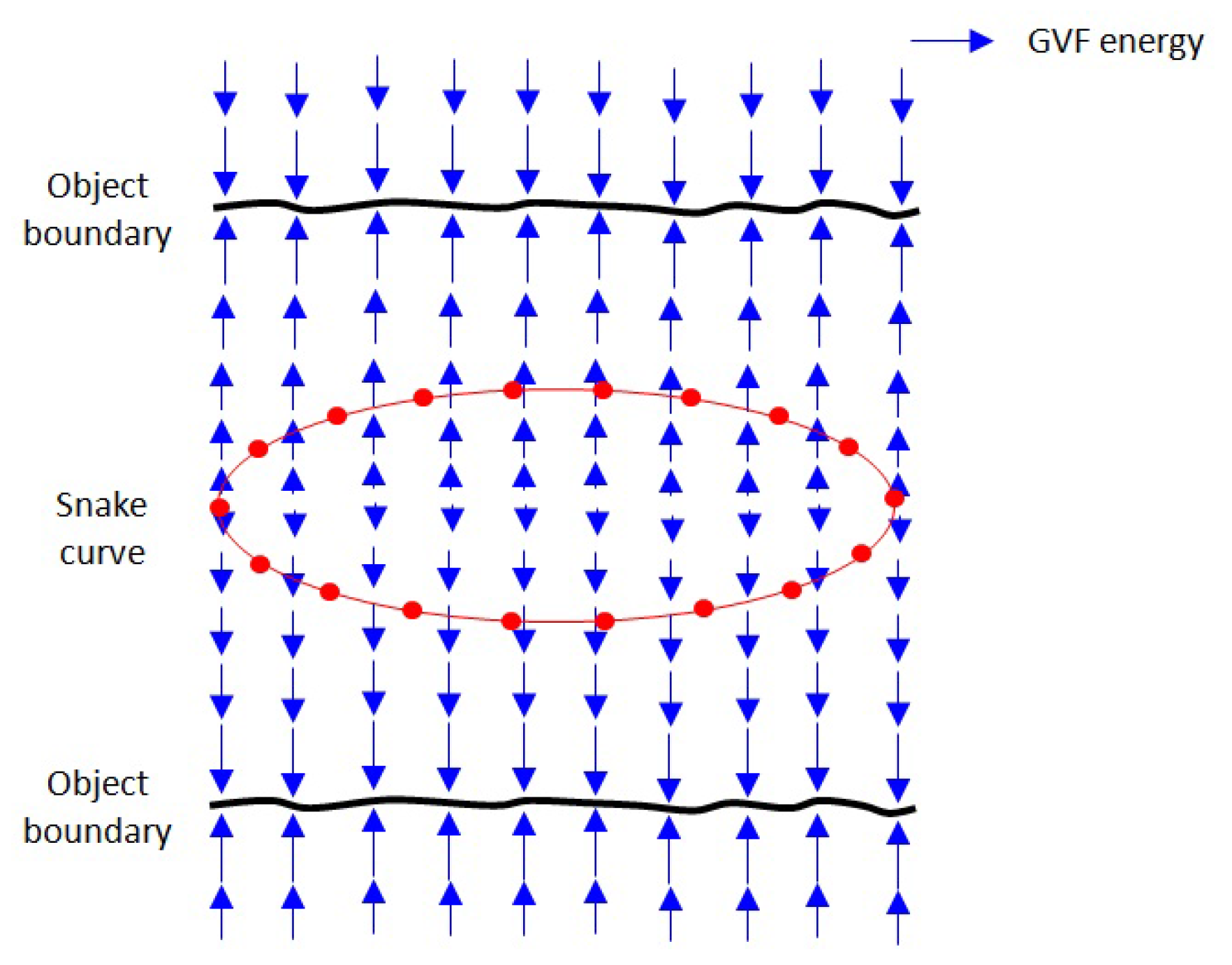
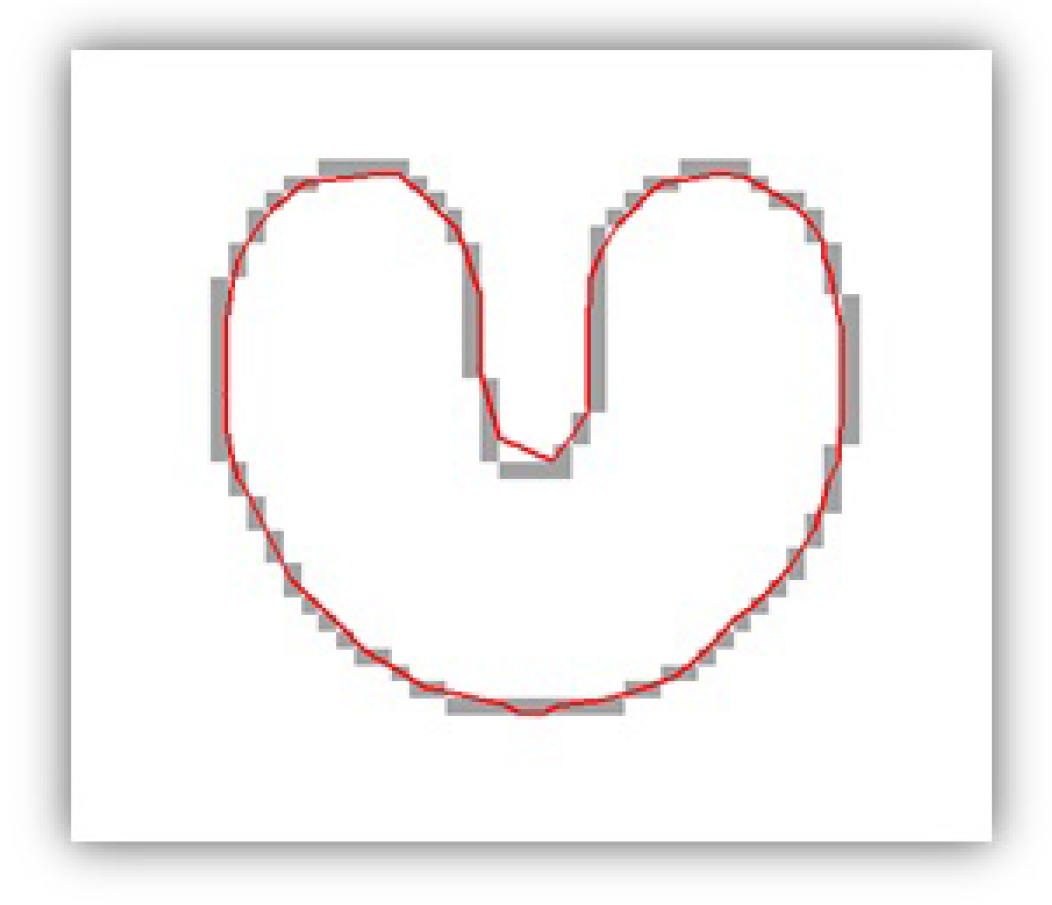
2.1.2. GVF Model
2.1.3. Integrated Model
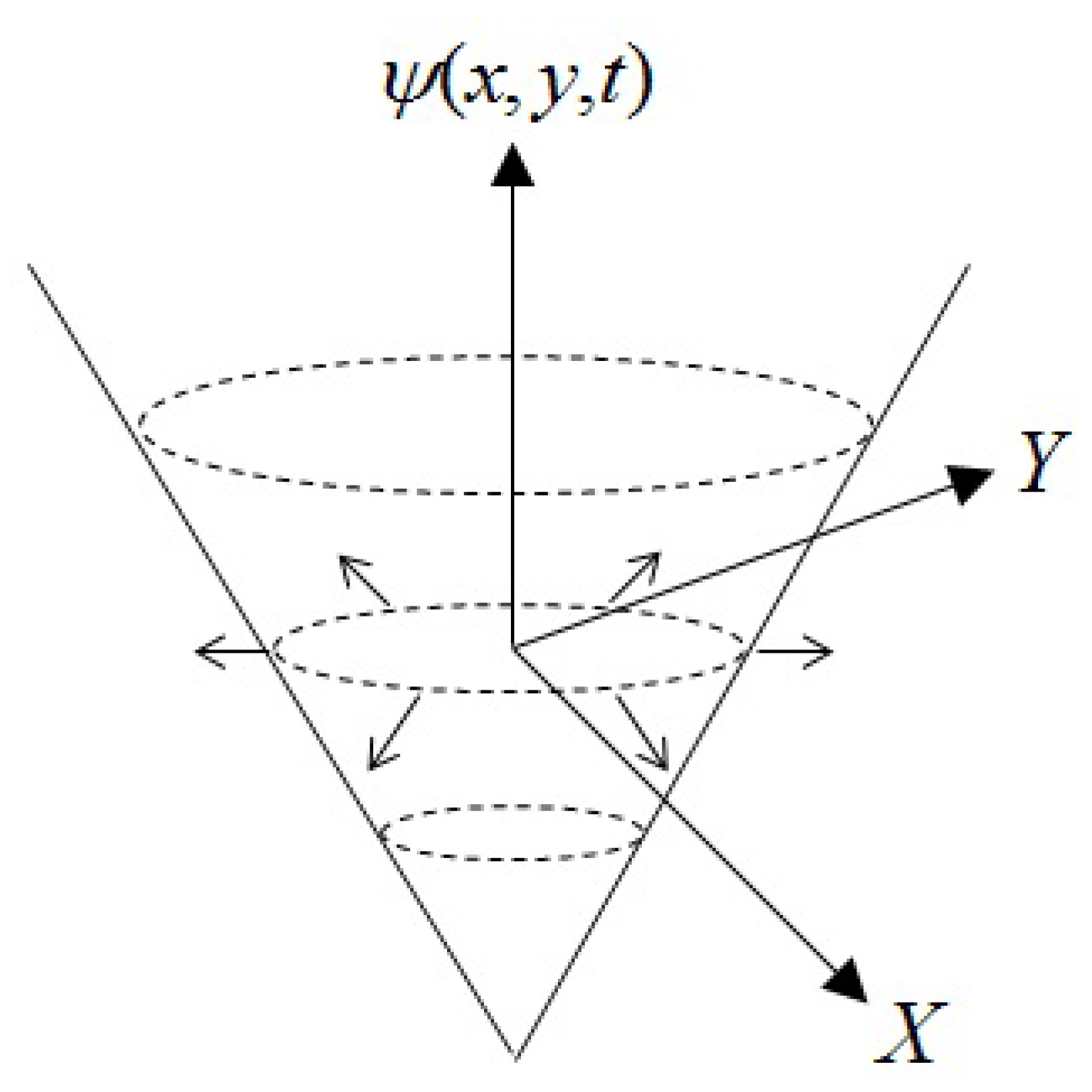
2.2. Geometric Active Contour Model
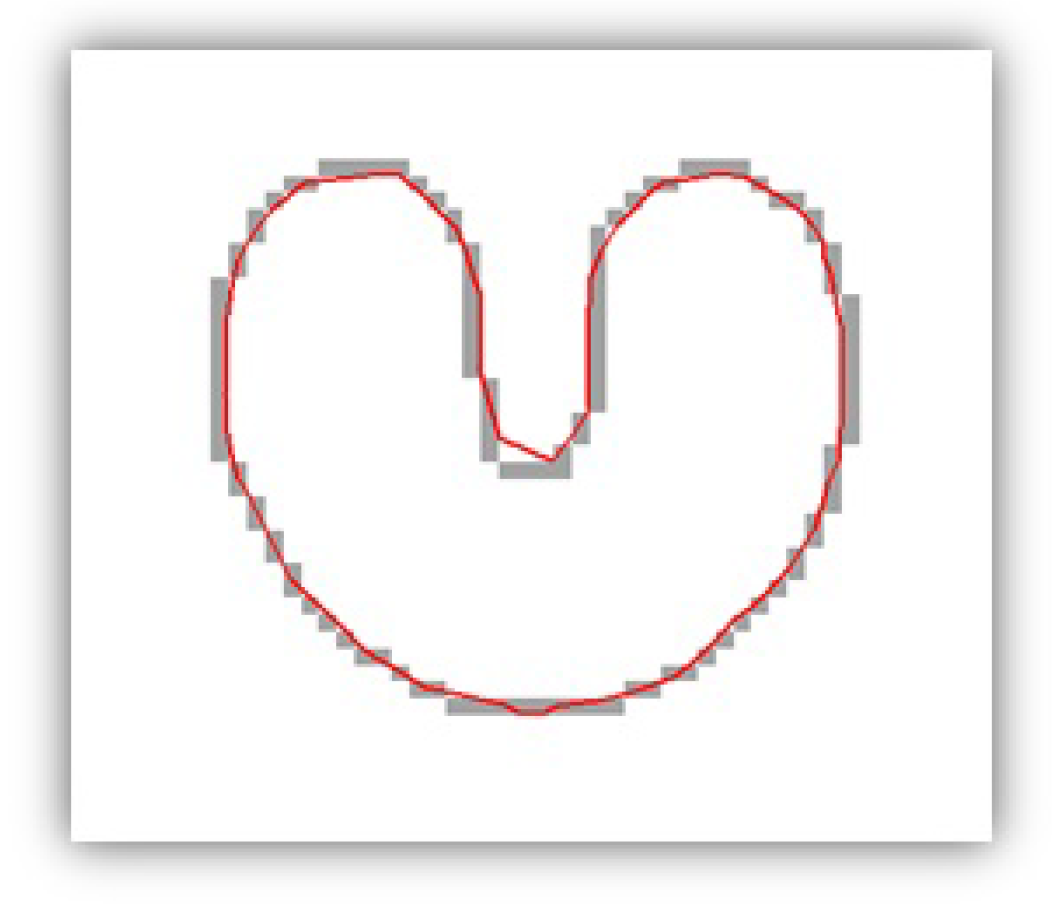
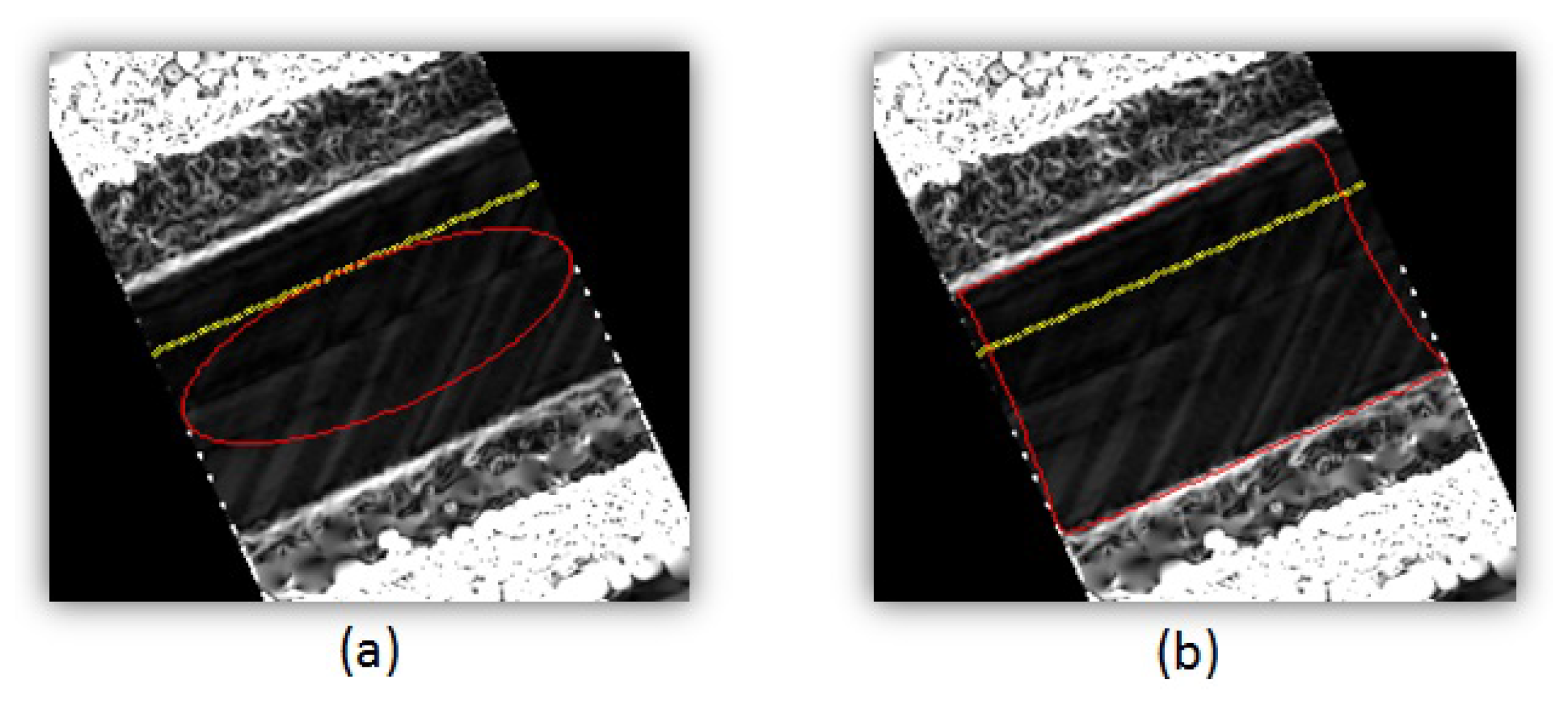
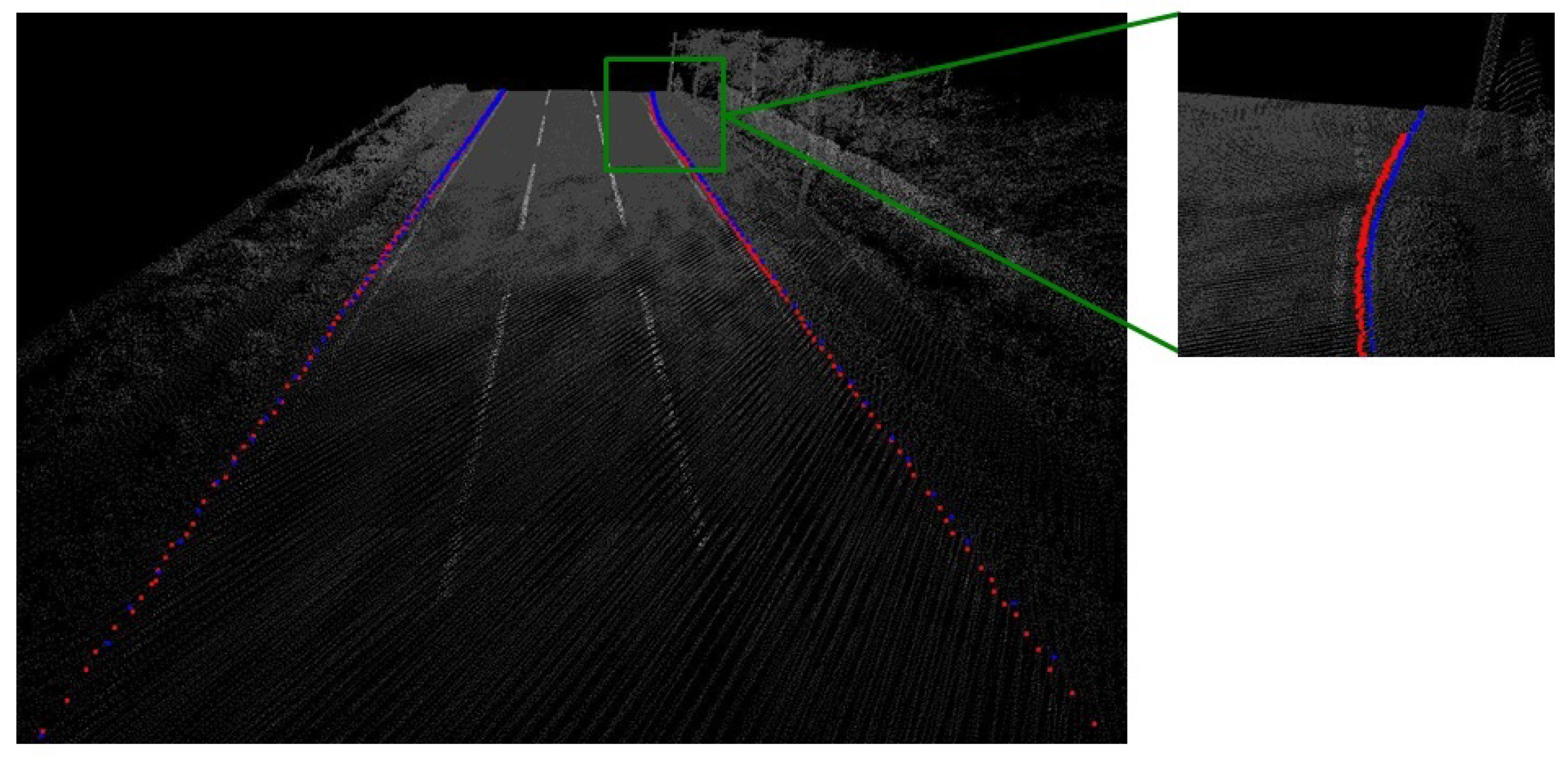
2.3. Road Extraction Using Active Contours
3. Case Study
4. Results and Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| CRF | Conditional Random Field |
| CVF | Curvature Vector Flow |
| DLM | Digital Landscape Model |
| DTM | Digital Terrain Model |
| GVF | Gradient Vector Flow |
| GGVF | Generalized Gradient Vector Flow |
| LiDAR | Light Detection and Ranging |
| MAC | Magnetostatic Active Contour |
| MLS | Mobile Laser Scanning |
| NDSM | Normalized Digital Surface Model |
References
- Burtch, R. LiDAR principles and applications. In Proceedings of the Imagine Conference, Traverse City, MI, USA, 29 April–1 May 2002; pp. 1–13. [Google Scholar]
- Mallet, C.; Bretar, F. Full-waveform topographic LiDAR: State-of-the-art. ISPRS J. Photogramm. Remote Sens. 2009, 64, 1–16. [Google Scholar] [CrossRef]
- Lohani, B. Airborne Altimetry LiDAR: Principle, Data Collection, Processing and Applications. Available online: http://home.iitk.ac.in/~blohani/LiDAR_Tutorial/Airborne_AltimetricLidar_Tutorial.htm (accessed on 12 January 2016).
- Petrie, G.; Toth, C.K. Introduction to laser ranging, profiling and scanning. In Topographic Laser Ranging and Scanning: Principles and Processing; CRC Press: Boca Raton, FL, USA, 2008; pp. 1–28. [Google Scholar]
- Kumar, P.; McElhinney, C.P.; Lewis, P.; McCarthy, T. Automated road markings extraction from mobile laser scanning data. Int. J. Appl. Earth Obs. Geoinf. 2014, 32, 125–137. [Google Scholar] [CrossRef]
- Kumar, P.; Lewis, P.; McElhinney, C.P.; Abdul-Rahman, A. An algorithm for automated estimation of road roughness from mobile laser scanning data. Photogramm. Rec. 2015, 30, 30–45. [Google Scholar] [CrossRef]
- Vosselman, G. Advanced point cloud processing. In Proceedings of the Photogrammetric Week, Stuttgart, Germany, 7–11 September 2009; pp. 137–146. [Google Scholar]
- McElhinney, C.P.; Kumar, P.; Cahalane, C.; McCarthy, T. Initial results from european road safety inspection (EURSI) mobile mapping project. In Proceedings of the International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, Newcastle, UK, 21–24 June 2010; Volume XXXVIII, pp. 440–445. [Google Scholar]
- Ibrahim, S.; Lichti, D. Curb-based street floor extraction from mobile terrestrial LiDAR point cloud. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Melbourne, Australia, 25 August–1 September 2012; Volume XXXIX, pp. 193–198. [Google Scholar]
- Zhou, L.; Vosselman, G. Mapping curbstones in airborne and mobile laser scanning data. Int. J. Appl. Earth Obs. Geoinf. 2012, 18, 293–304. [Google Scholar] [CrossRef]
- Wang, H.; Luo, H.; Wen, C.; Cheng, J.; Li, P.; Chen, Y.; Wang, C.; Li, J. Road boundaries detection based on local normal saliency from mobile laser scanning data. IEEE Geosci. Remote Sens. Lett. 2015, 12, 2085–2089. [Google Scholar] [CrossRef]
- Hui, Z.; Hu, Y.; Jin, S.; Yevenyo, Y.Z. Road centerline extraction from airborne LiDAR point cloud based on hierarchical fusion and optimization. ISPRS J. Photogramm. Remote Sens. 2016, 118, 22–36. [Google Scholar] [CrossRef]
- Xiao, L.; Wang, R.; Dai, B.; Fang, Y.; Liu, D.; Wu, T. Hybrid conditional random field based camera-LiDAR fusion for road detection. Inf. Sci. 2017. [Google Scholar] [CrossRef]
- Blake, A.; Isard, M. Active Contours, 1st ed.; Springer: London, UK, 1998. [Google Scholar]
- Kass, M.; Witkin, A.; Terzopoulos, D. Snakes: Active contour models. Int. J. Comput. Vis. 1988, 1, 321–331. [Google Scholar] [CrossRef]
- Lundervold, A.; Storvik, G. Segmentation of brain parenchyma and cerebrospinal fluid in multispectral magnetic resonance images. IEEE Trans. Med. Imaging 1995, 14, 339–349. [Google Scholar] [CrossRef] [PubMed]
- Panah, M.; Javidi, B. Segmentation of 3D holographic images using jointly distributed region snake. Opt. Express 2006, 14, 5143–5153. [Google Scholar]
- Xu, C.; Yezzi, A.; Prince, J.L. On the relationship between parametric and geometric active contours. In Proceedings of the 34th Annual Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 30 Otober–1 November 2000; pp. 483–489. [Google Scholar]
- Kumar, P.; McCarthy, T.; McElhinney, C.P. Automated road extraction from terrestrial based mobile laser scanning system using the GVF snake model. In Proceedings of the European LiDAR Mapping Forum, Hague, The Netherlands, 30 Otober–1 December 2010; p. 10. [Google Scholar]
- Sonka, M.; Hlavac, V.; Boyle, R. Image Processing, Analysis and Machine Vision, 2nd ed.; Thomson Engineering: New York, NY, USA, 2008. [Google Scholar]
- Xu, C.; Prince, J.L. Snakes, shapes, and gradient vector flow. IEEE Trans. Image Process. 1998, 7, 359–369. [Google Scholar] [PubMed]
- Kumar, P.; McElhinney, C.P.; McCarthy, T. Utilizing terrestrial mobile laser scanning data attributes for road edge extraction using the GVF snake model. In Proceedings of the 7th International Symposium on Mobile Mapping Technology, Krakow, Poland, 13–16 June 2011; pp. 1–6. [Google Scholar]
- Kabolizade, M.; Ebadi, H.; Ahmadi, S. An improved snake model for automatic extraction of buildings from urban aerial images and LiDAR data. Comput. Environ. Urban Syst. 2010, 34, 435–441. [Google Scholar] [CrossRef]
- Cohen, L.D. On active contour models and balloons. CVGIP Image Underst. 1991, 53, 211–218. [Google Scholar] [CrossRef]
- Xu, C.; Prince, J.L. Gradient vector flow: A new external force for snakes. In Proceedings of the Computer Vision Pattern Recognition, San Juan, Puerto Rico, 17–19 June 1997; pp. 66–71. [Google Scholar]
- Kumar, P. Road Features Extraction Using Terrestrial Mobile Laser Scanning System. Ph.D. Thesis, National University of Ireland Maynooth (NUIM), Co. Kildare, Ireland, 2012. [Google Scholar]
- Caselles, V.; Catt, F.; Coll, T.; Dibos, F. A geometric model for active contours in image processing. Numer. Math. 1993, 66, 1–31. [Google Scholar] [CrossRef]
- Malladi, R.; Sethian, J.A.; Vemuri, B.C. Shape modeling with front propagation: A level set approach. IEEE Trans. Pattern Anal. Mach. Intell. 1995, 17, 158–175. [Google Scholar] [CrossRef]
- Weisstein, E.W. Level Set. Available online: http://mathworld.wolfram.com/LevelSet.html (accessed on 25 July 2012).
- Xu, C.; Prince, J. Generalized gradient vector flow external forces for active contours. Signal Process. 1998, 71, 131–139. [Google Scholar] [CrossRef]
- Chan, T.F.; Vese, L.A. Active contours without edges. IEEE Trans. Image Process. 2001, 10, 266–277. [Google Scholar] [CrossRef] [PubMed]
- Gil, D.; Radeva, P. Curvature vector flow to assure convergent deformable models for shape modelling. In Proceedings of the 4th International Workshop on Energy Minimizing Methods in Computer Vision and Pattern Recognition, Lisbon, Portugal, 7–9 July 2003; pp. 357–372. [Google Scholar]
- Paragios, N.; Gottardo, O.; Ramesh, V. Gradient vector flow fast geometric active contours. IEEE Trans. Pattern Anal. Mach. Intell. 2004, 26, 402–407. [Google Scholar] [CrossRef] [PubMed]
- Xie, X.; Mirmehdi, M. MAC: Magnetostatic active contour model. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 30, 632–646. [Google Scholar] [CrossRef] [PubMed]
- Youn, J.; Bethel, J.S. Adaptive snakes for urban road extraction. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Istanbul, Turkey, 12–23 July 2004; Volume 35, pp. 465–470. [Google Scholar]
- Yagi, Y.; Brady, M.; Kawasaki, Y.; Yachida, M. Active contour road model for road tracking and 3D road shape reconstruction. Electron. Commun. Jpn. Part 3 2005, 88, 1597–1607. [Google Scholar] [CrossRef]
- Niu, X. A geometric active contour model for highway extraction. In Proceedings of the ASPRS Annual Conference, Reno, NV, USA, 1–5 May 2006. [Google Scholar]
- Zhang, H.; Xiao, Z.; Zhou, Q. Research on road extraction semi-automatically from high resolution remote sensing images. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Beijing, China, 3–11 July 2008; Volume 37, pp. 535–538. [Google Scholar]
- Goepfert, J.; Rottensteiner, F. Adaption of roads to ALS data by means of network snakes. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Paris, France, 1–2 September 2009; Volume 38, pp. 24–29. [Google Scholar]
- Goepfert, J.; Rottensteiner, F. Using building and bridge information for adapting roads to ALS data by means of network snakes. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Paris, France, 1–3 September 2010; Volume XXXVIII, pp. 163–168. [Google Scholar]
- Boyko, A.; Funkhouser, T. Extracting roads from dense point clouds in large scale urban environment. ISPRS J. Photogramm. Remote Sens. 2011, 66, S2–S12. [Google Scholar] [CrossRef]
- Kumar, P.; McElhinney, C.P.; Lewis, P.; McCarthy, T. An automated algorithm for extracting road edges from terrestrial mobile LiDAR data. ISPRS J. Photogramm. Remote Sens. 2013, 85, 44–55. [Google Scholar] [CrossRef]
- Kumar, P.; Lewis, P.; McElhinney, C.P. Parametric analysis for automated extraction of road edges from mobile laser scanning data. In Proceedings of the ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, KualaLumpur, Malaysia, 28–30 October 2015; pp. 215–221. [Google Scholar]
- Crawford, C. Minimising Noise from LiDAR for Contouring and Slope Analysis. 2009. Available online: http://blogs.esri.com/esri/arcgis/2009/09/02 (accessed on 7 June 2012).
- Kumar, P.; Lewis, P.; McElhinney, C.P.; Boguslawski, P.; McCarthy, T. Snake energy analysis and result validation for a mobile laser scanning data based automated road edge extraction algorithm. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 763–773. [Google Scholar] [CrossRef]
- StreetMapper. 3D Laser Mapping. 2005. Available online: http://www.3dlasermapping.com/streetmapper (accessed on 15 December 2016).
- Cahalane, C.; McElhinney, C.P.; Lewis, P.; McCarthy, T. MIMIC: An innovative methodology for determining mobile laser scanning system point density. Remote Sens. 2014, 6, 7857–7877. [Google Scholar]
- Cahalane, C.; Lewis, P.; McElhinney, C.P.; McCarthy, T. Optimising mobile mapping system laser orientation. ISPRS Int. J. Geo-Inf. 2015, 4, 302–319. [Google Scholar] [CrossRef]
- Cahalane, C.; Lewis, P.; McElhinney, C.P.; McNerney, E.; McCarthy, T. Improving MMS Performance during Infrastructure Surveys through Geometry Aided Design. Infrastructures 2016, 1, 5. [Google Scholar] [CrossRef]
- Guan, H.; Li, J.; Yu, Y.; Chapman, M.; Wang, C. Automated road information extraction from mobile laser scanning data. IEEE Trans. Intell. Transp. Syst. 2015, 16, 194–205. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
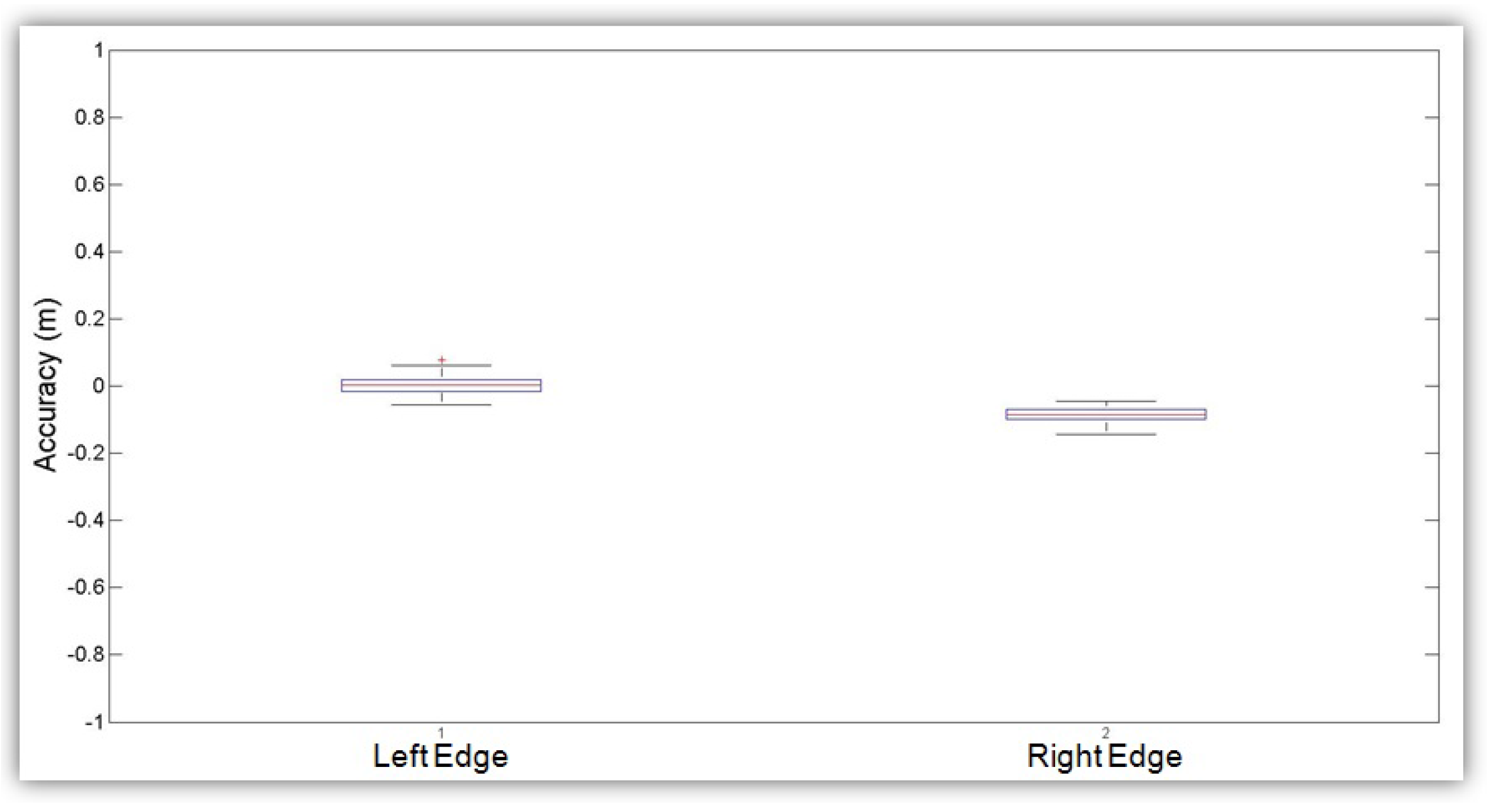
| Left Edge | Right Edge | |
|---|---|---|
| minimum (m) | −0.055 | −0.145 |
| maximum (m) | 0.078 | −0.046 |
| lower adjacent (m) | −0.055 | −0.145 |
| upper adjacent (m) | 0.061 | −0.046 |
| 25th percentile (m) | −0.016 | −0.099 |
| 75th percentile (m) | 0.019 | −0.068 |
| mean (m) | 0.001 | −0.088 |
| median (m) | 0.001 | −0.086 |
| outliers (%) | 1.64 | 0 |
| inside (%) | 26.26 | 0 |
| inside (%) | 100 | 75.41 |
| inside (%) | 100 | 100 |
| horizontal RMSE (m) | 0.02 | 0.09 |
| vertical RMSE (m) | 0.02 | 0.02 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kumar, P.; Lewis, P.; McCarthy, T. The Potential of Active Contour Models in Extracting Road Edges from Mobile Laser Scanning Data. Infrastructures 2017, 2, 9. https://doi.org/10.3390/infrastructures2030009
Kumar P, Lewis P, McCarthy T. The Potential of Active Contour Models in Extracting Road Edges from Mobile Laser Scanning Data. Infrastructures. 2017; 2(3):9. https://doi.org/10.3390/infrastructures2030009
Chicago/Turabian StyleKumar, Pankaj, Paul Lewis, and Tim McCarthy. 2017. "The Potential of Active Contour Models in Extracting Road Edges from Mobile Laser Scanning Data" Infrastructures 2, no. 3: 9. https://doi.org/10.3390/infrastructures2030009
APA StyleKumar, P., Lewis, P., & McCarthy, T. (2017). The Potential of Active Contour Models in Extracting Road Edges from Mobile Laser Scanning Data. Infrastructures, 2(3), 9. https://doi.org/10.3390/infrastructures2030009