
UAV Applications for Monitoring and Management of Civil Infrastructures

 , , ,
, , ,  and
and 
Abstract
1. Introduction
- The technological evolution of UAVs, including improvements in autonomy, maneuverability, and payload capacity, as well as the integration of more advanced sensors (RGB, thermal, multispectral, LIDAR, etc.) that optimize their use as a diagnostic and maintenance tool.
- The practical application in critical monitoring and inspection tasks, where the benefits in terms of safety, operational efficiency, and accuracy in the detection of structural pathologies through methodologies such as 3D photogrammetry, artificial vision, or artificial intelligence are highlighted.
2. Drone Applications in Civil Engineering
2.1. Building Inspection
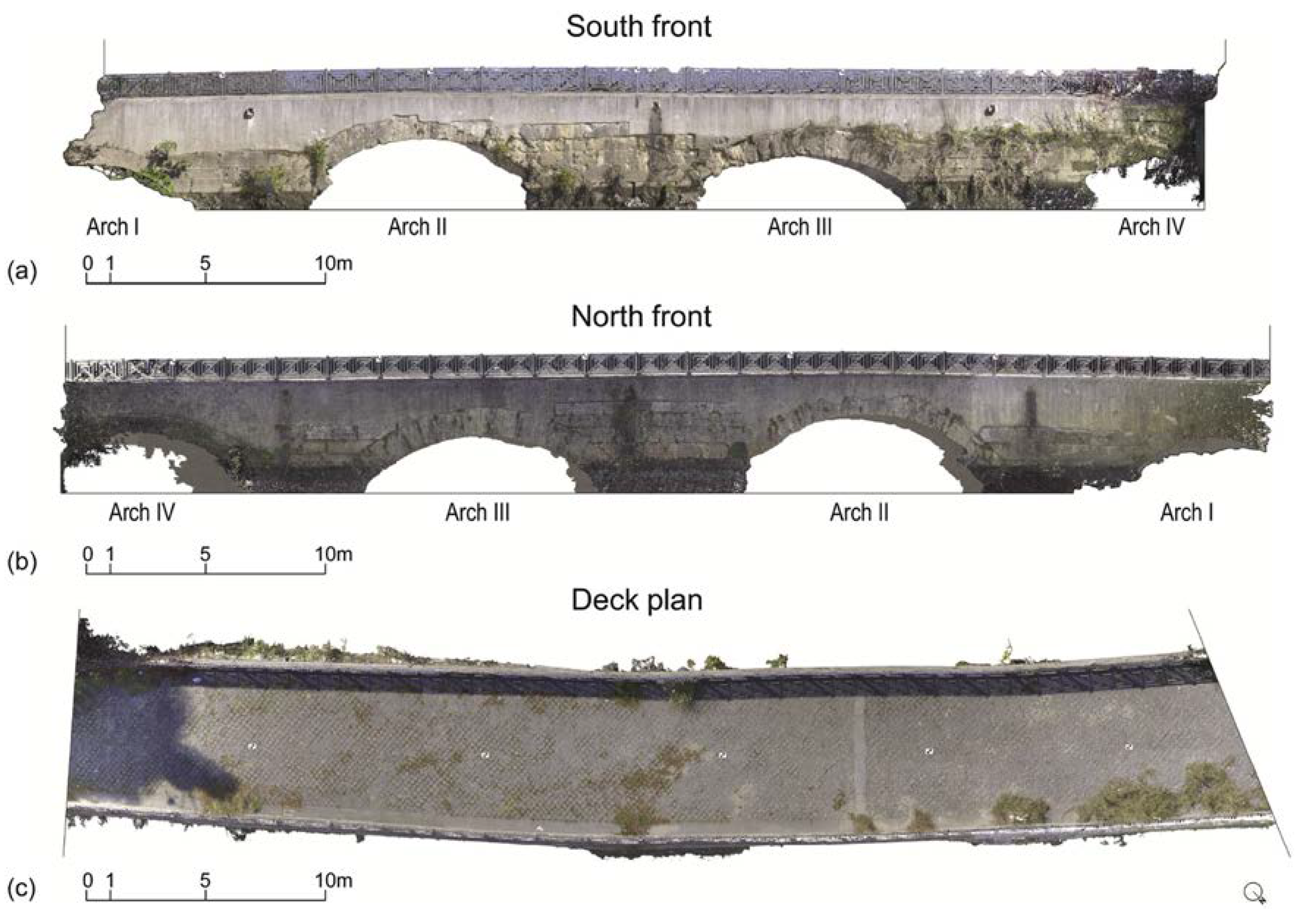
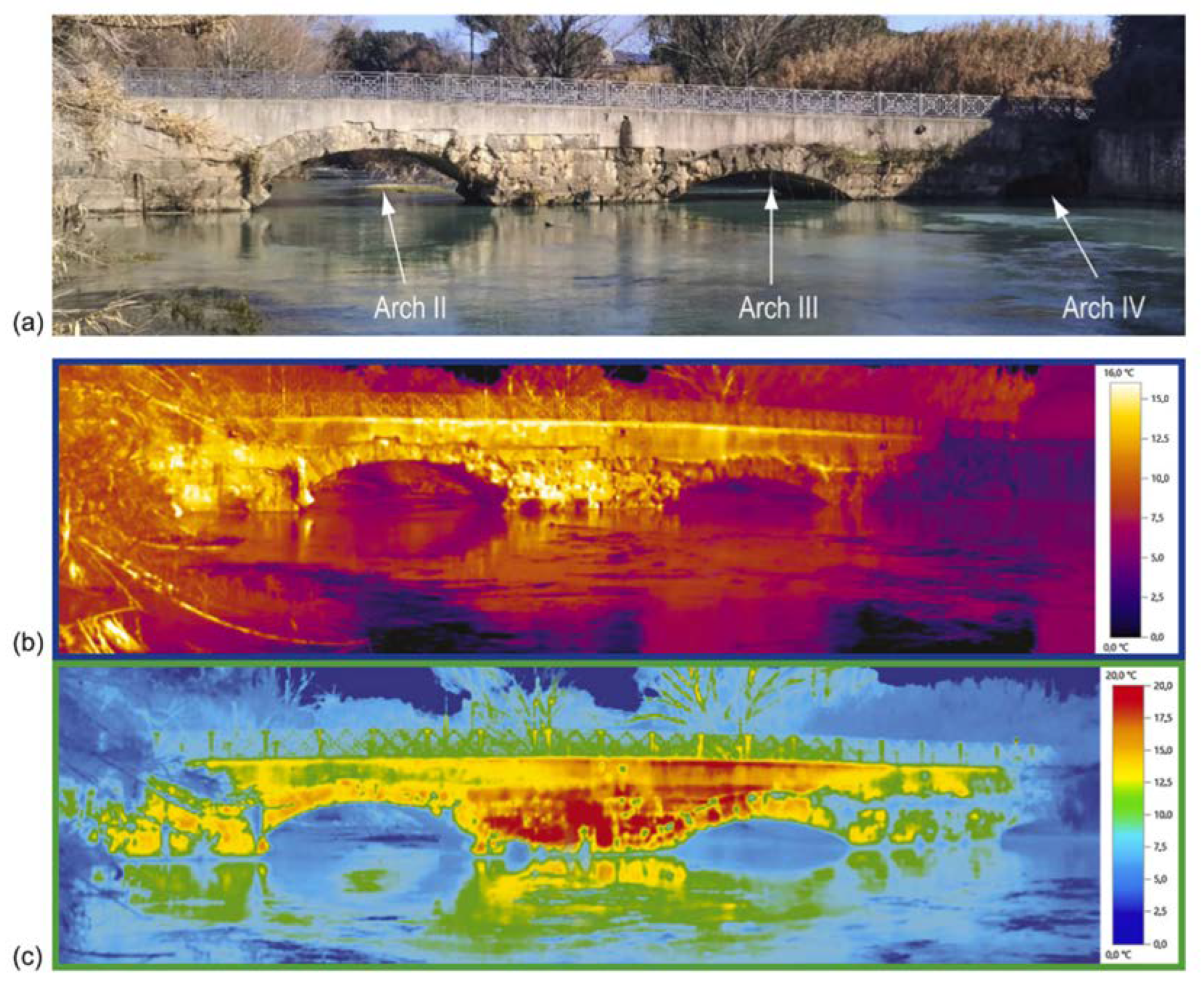
2.2. Bridge Inspection
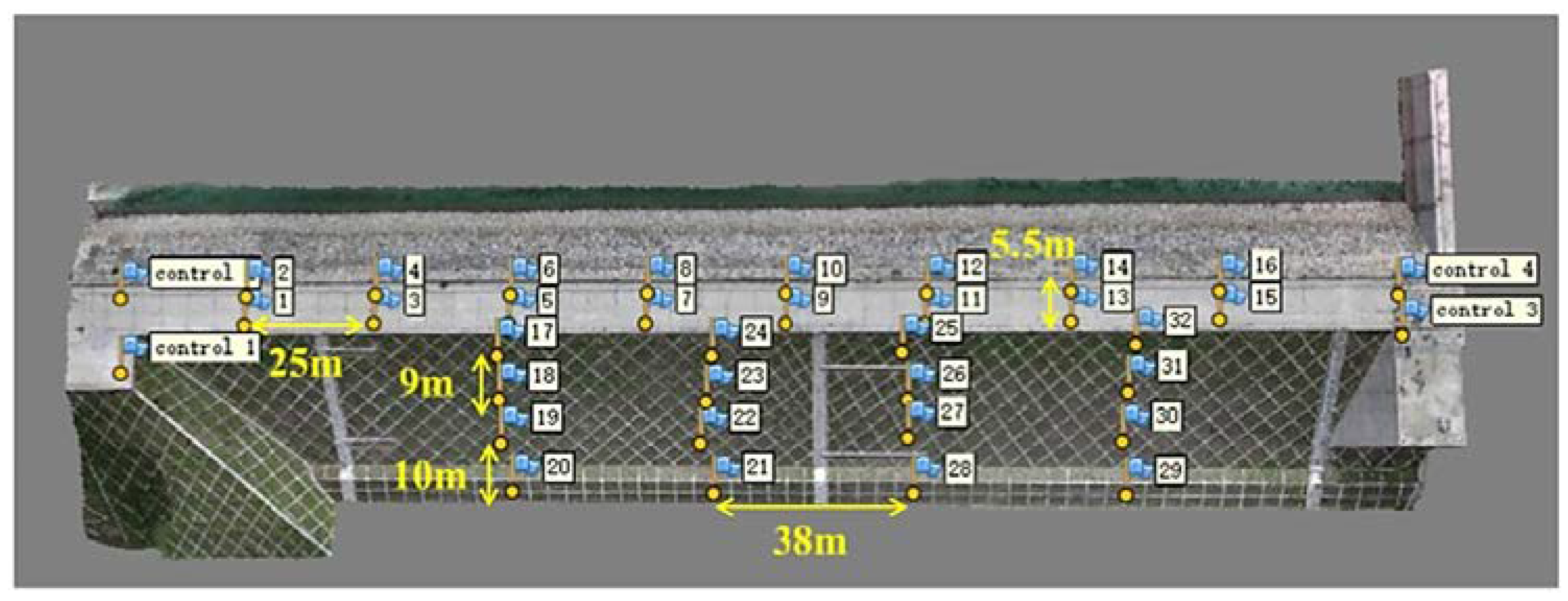
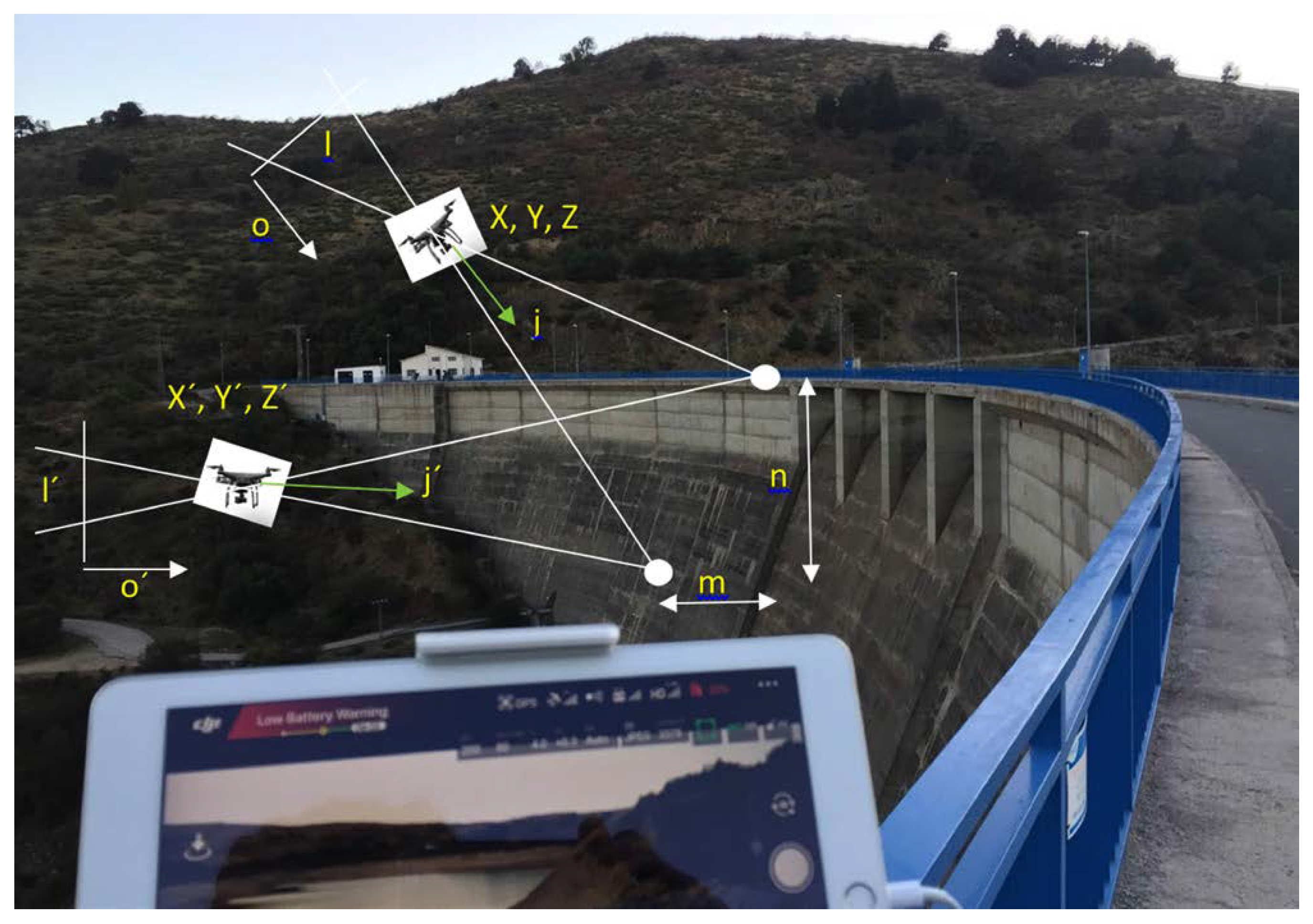
2.3. Dams
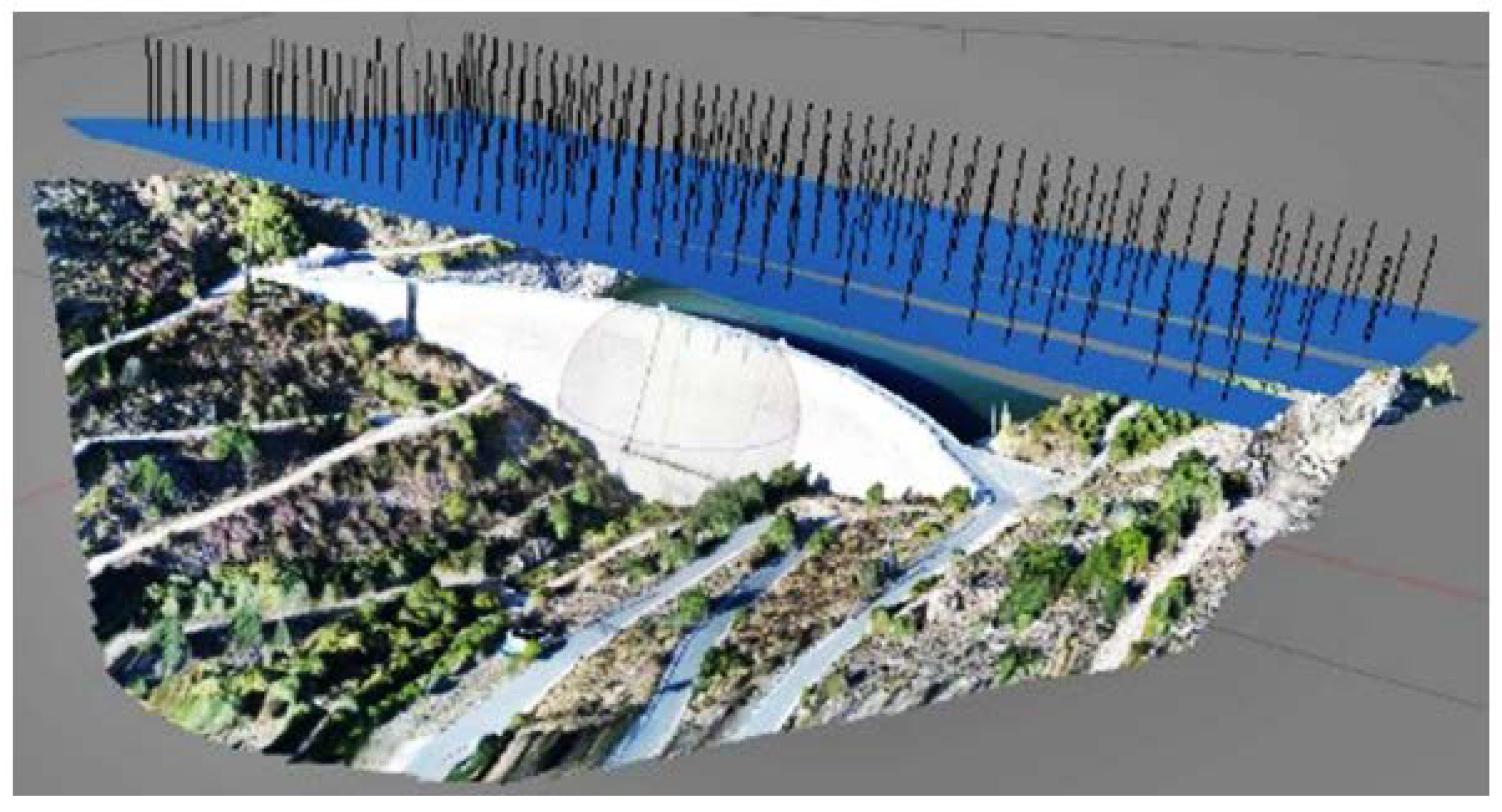
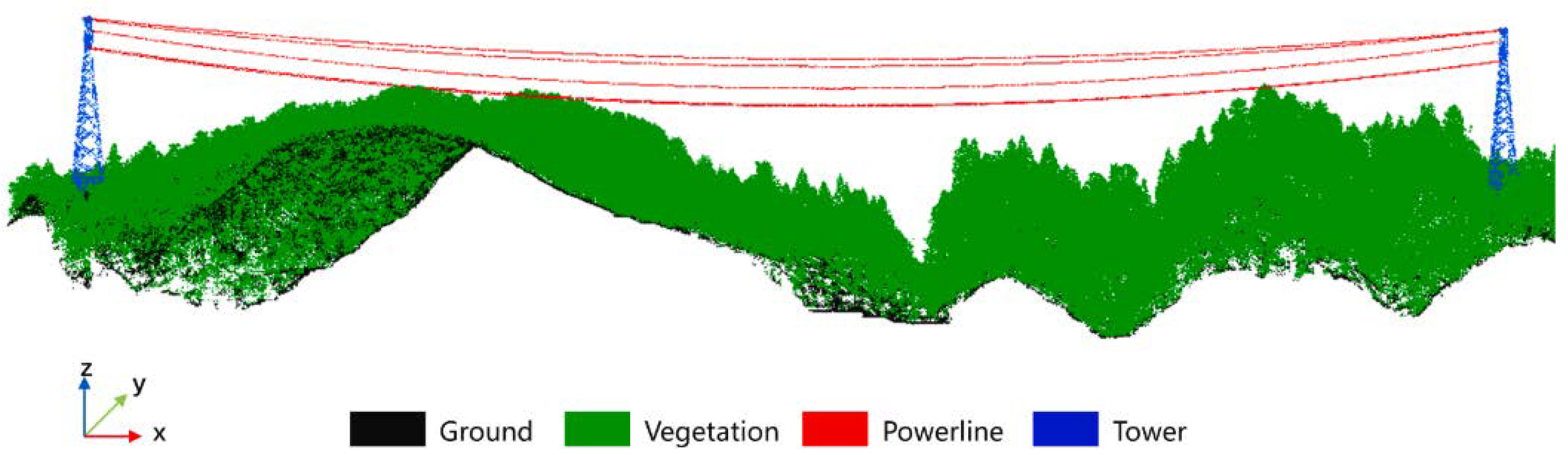
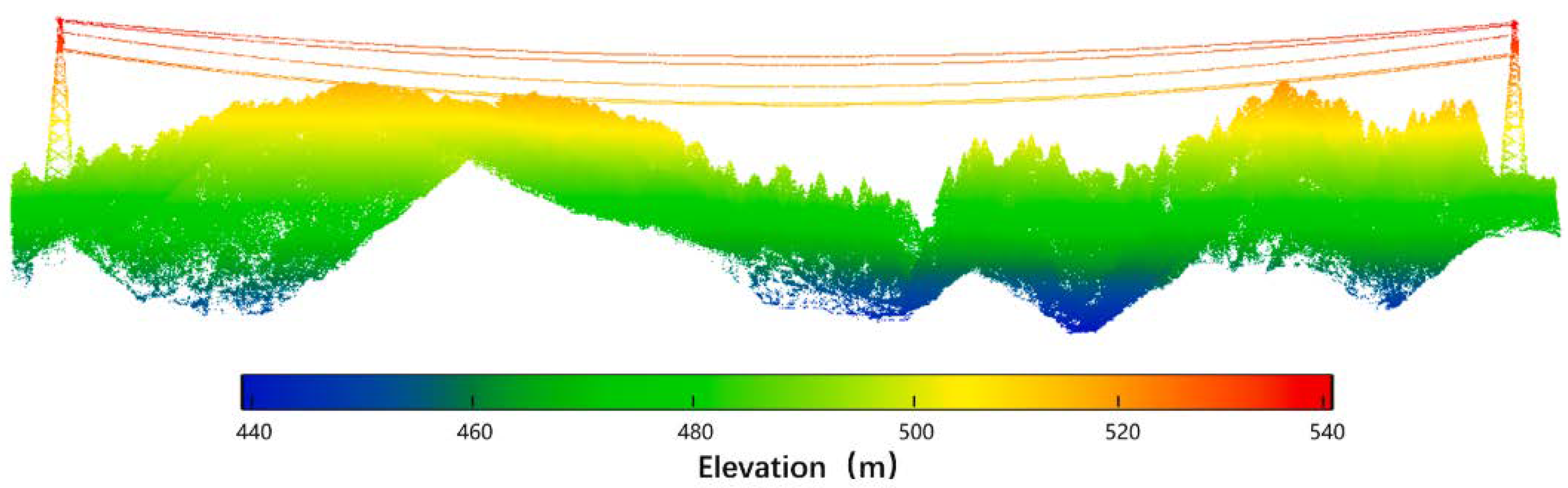
2.4. Power Line Inspection
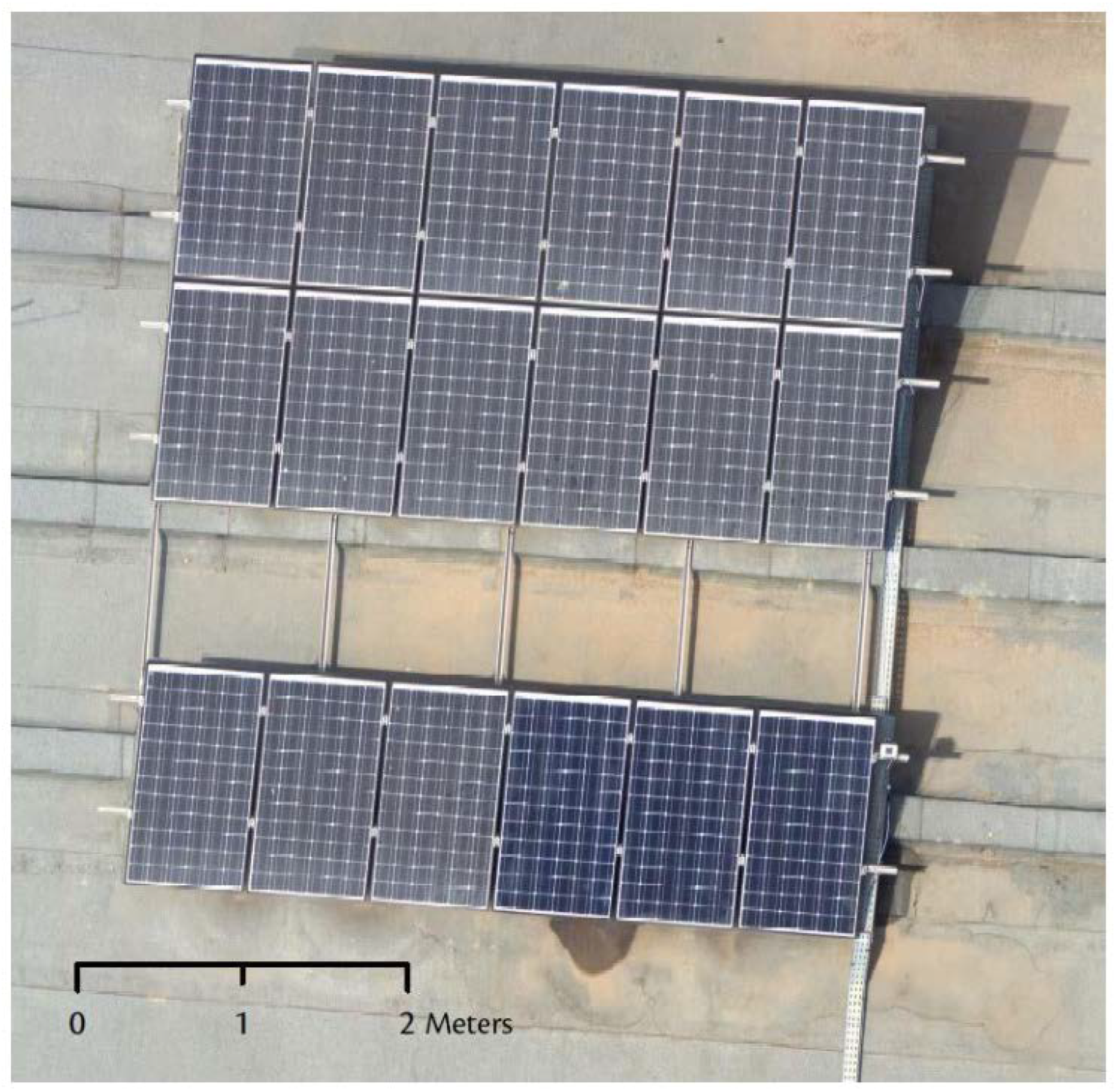
2.5. Photovoltaic Plants Inspection
- Mismatches or imperfections: cells that do not work correctly concerning the others.
- Breakages: these are the most frequent defects, they can occur during the manufacturing, transportation, or assembly process or due to meteorological factors once installed.
- Discolorations: due to internal factors (poor polymer quality) or to a sudden change in temperature and humidity.
- Dirt: caused by accumulated dust, contamination, or bird droppings.
- Lamination: defects in the lamination process or due to external climatic factors.
- Micro-cracks (snail tracks): small breaks in the surface of the plates caused by environmental factors.
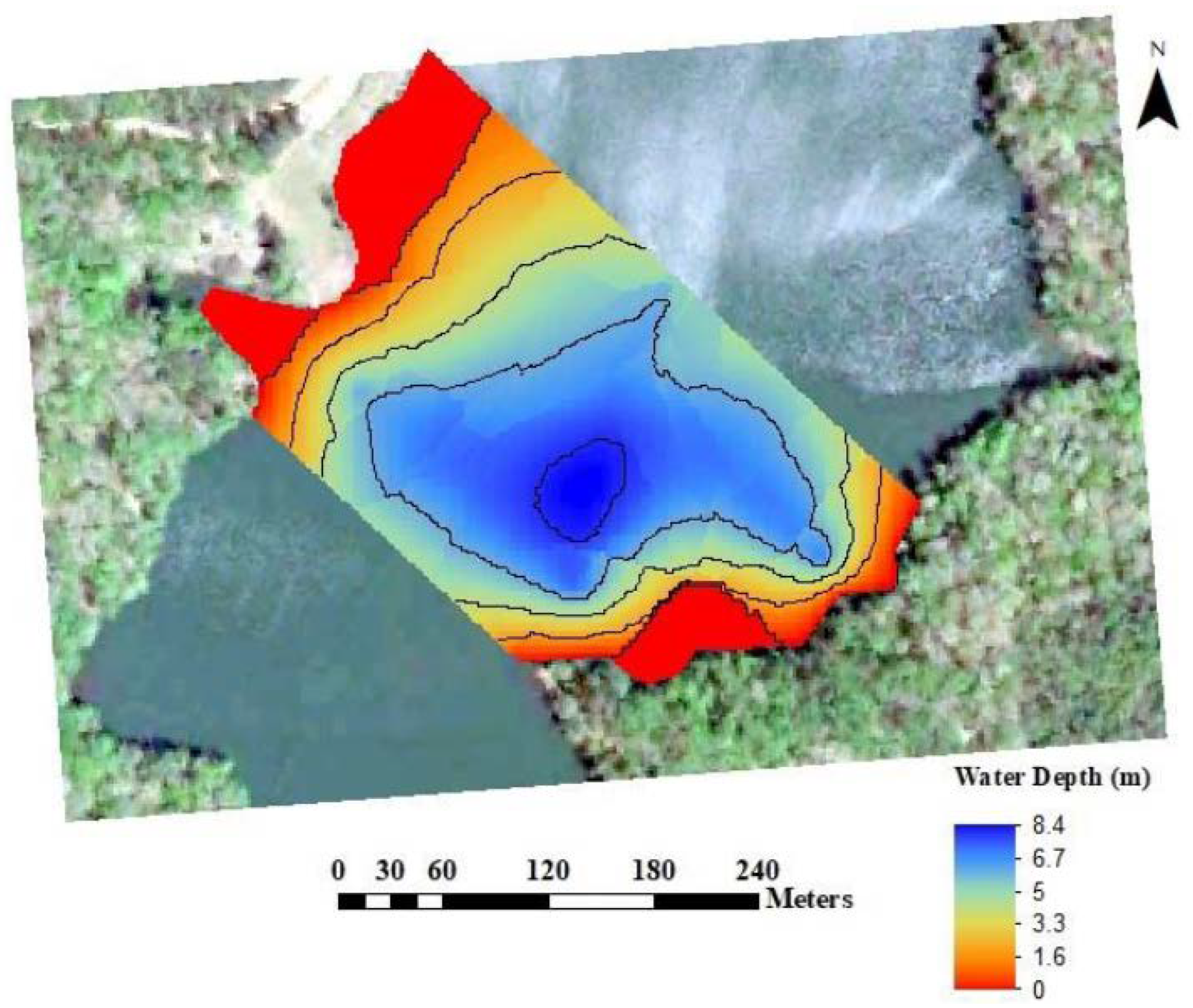
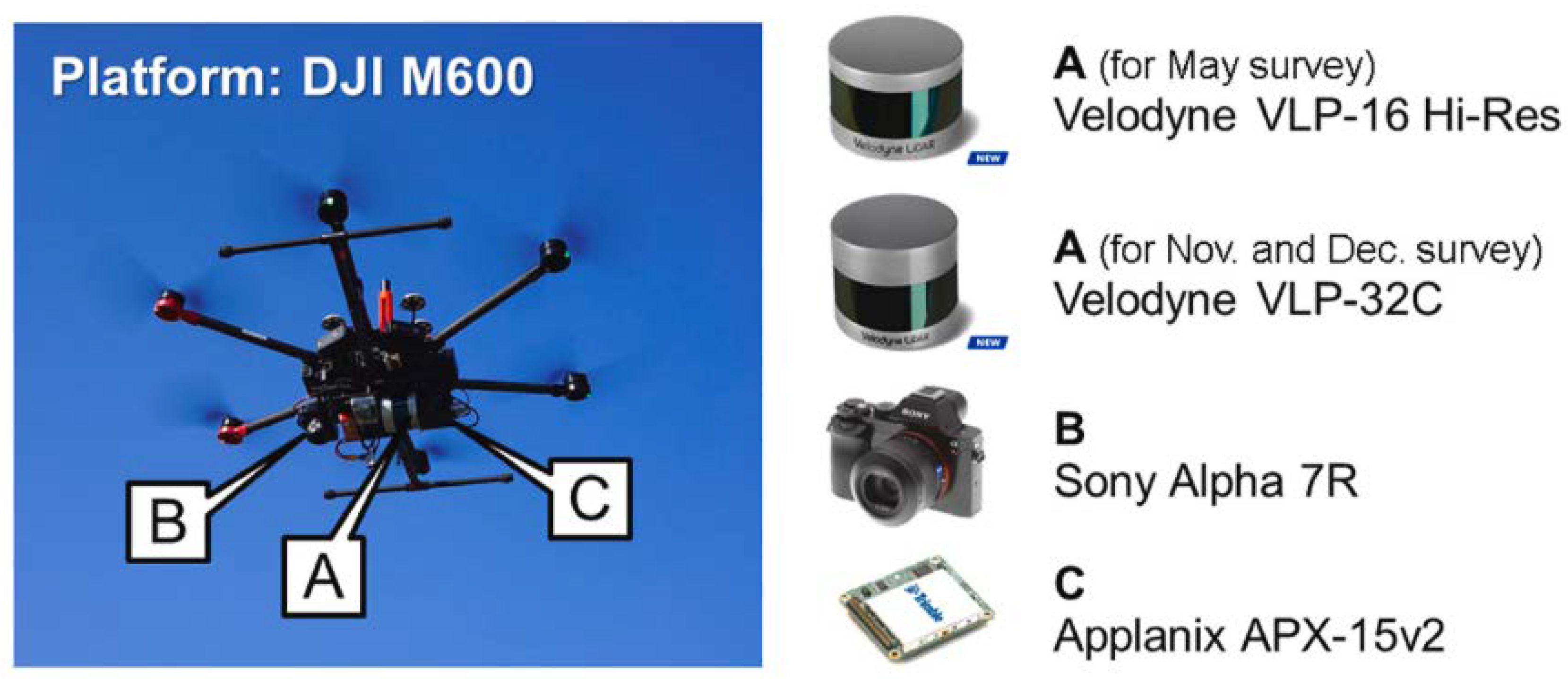
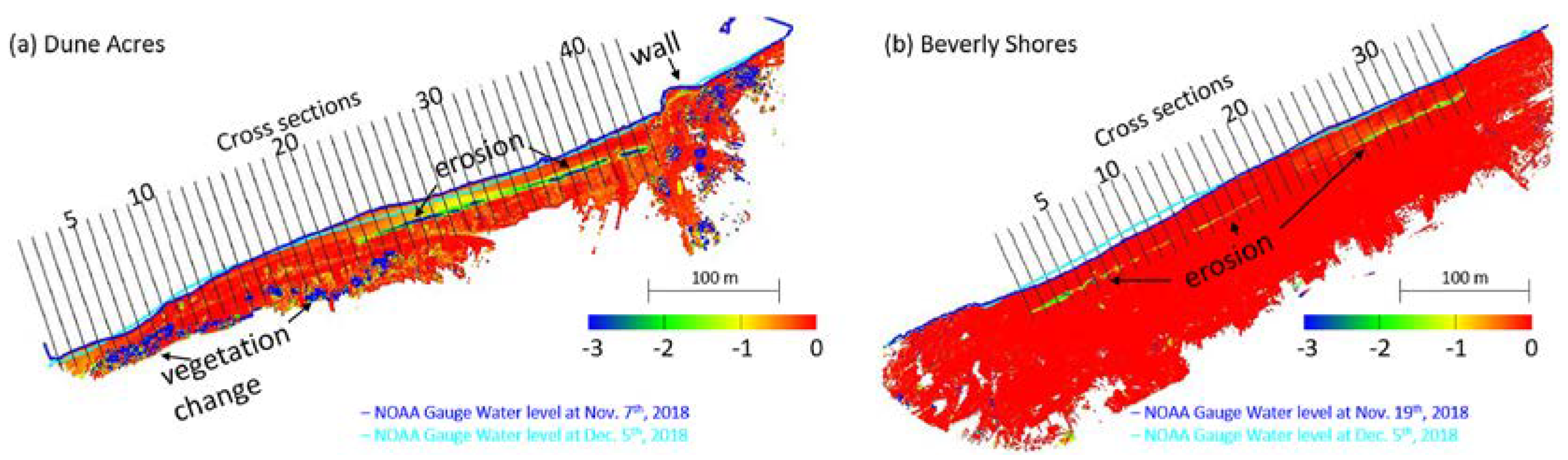
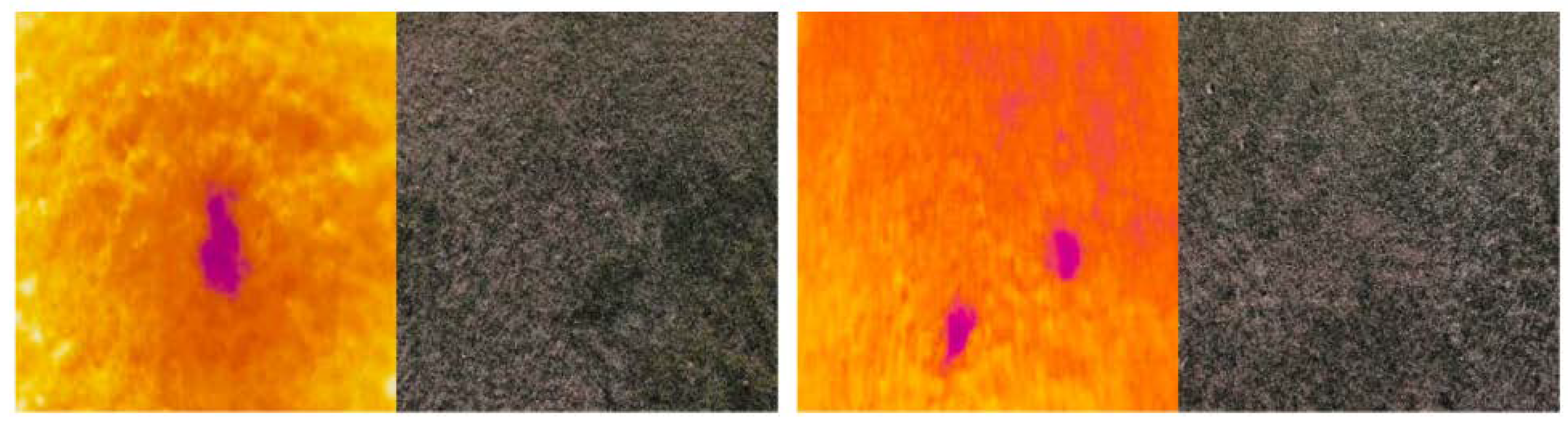
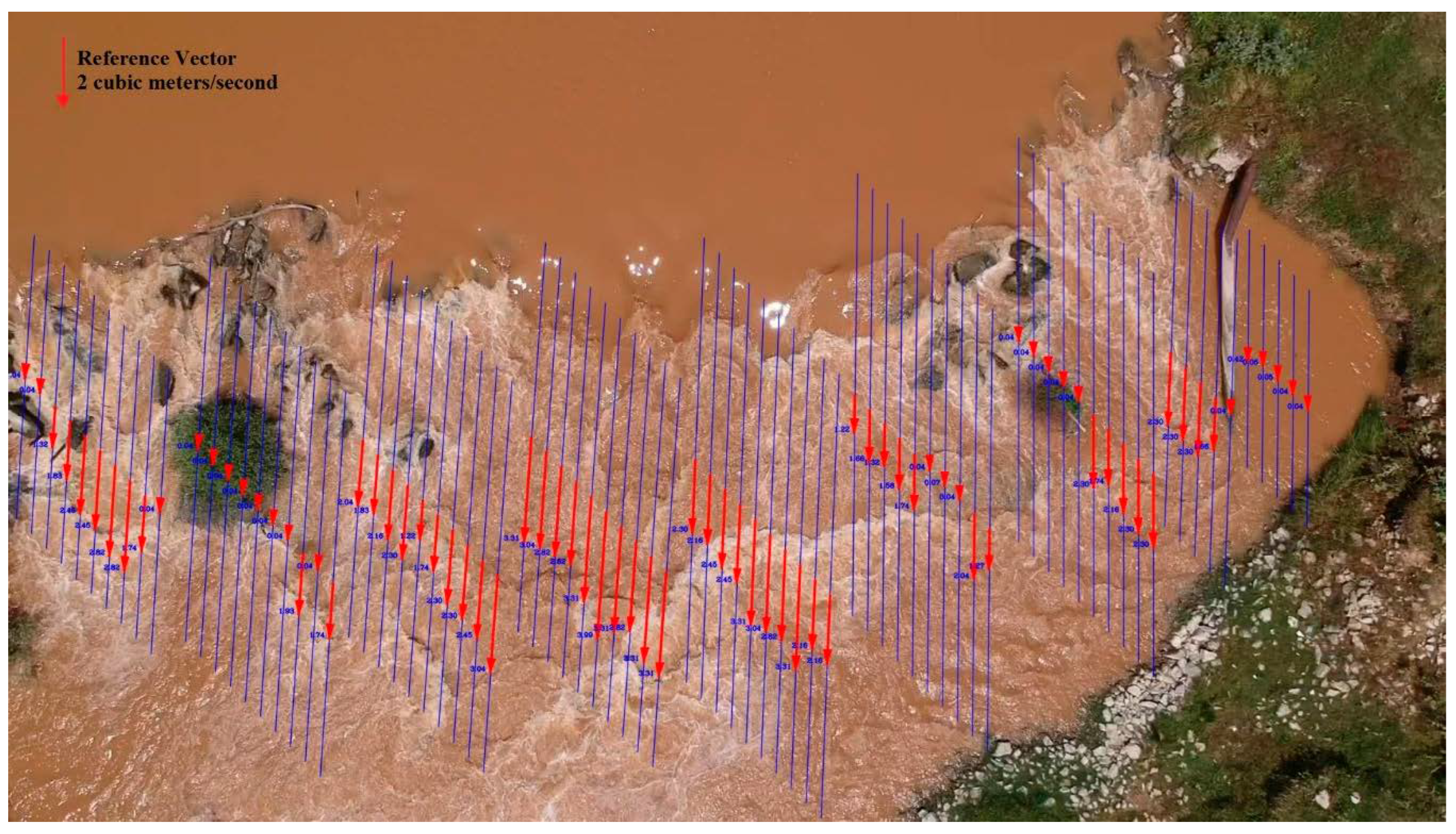
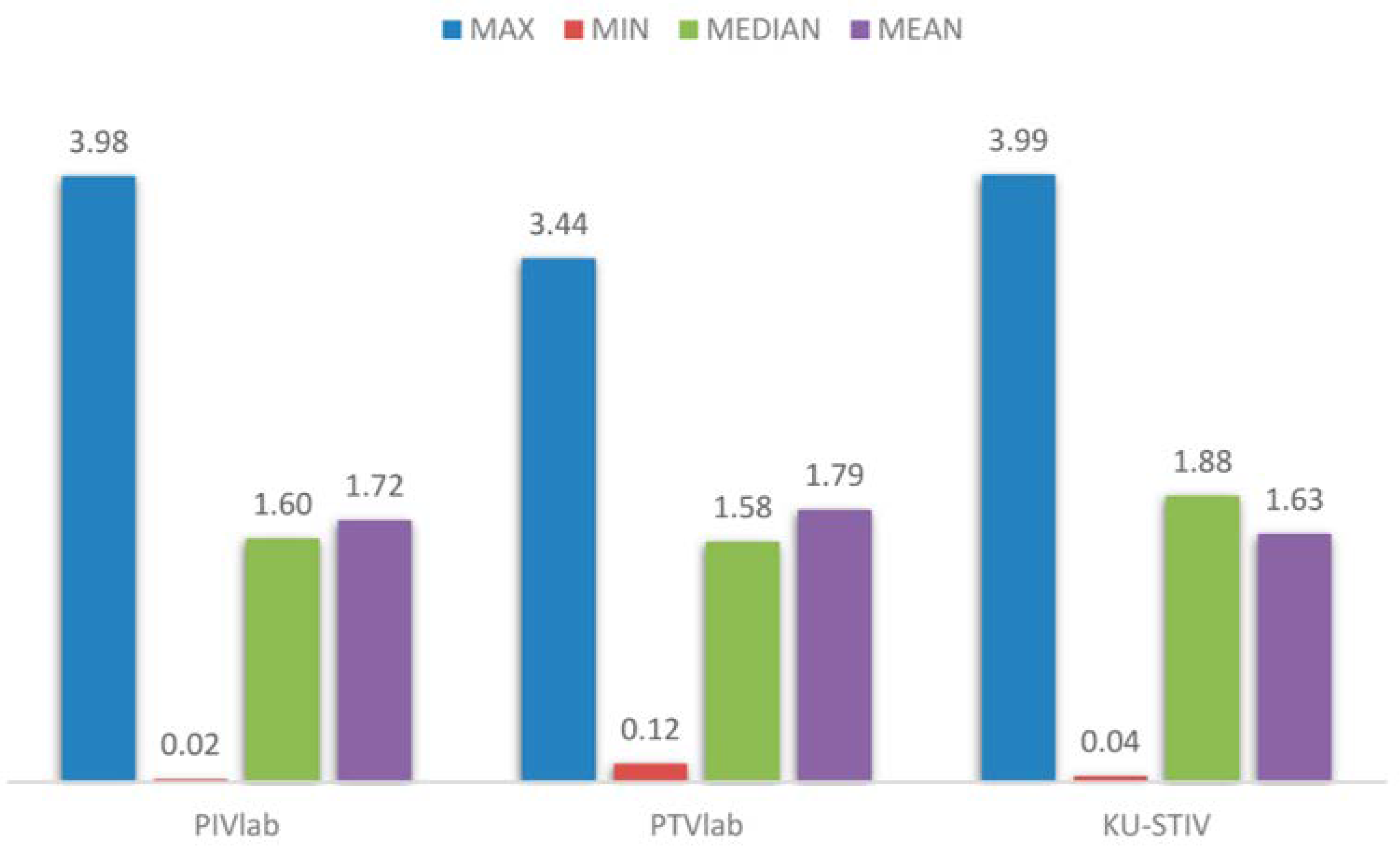
2.6. Hydrological Studies
- Thermal or infrared camera. It correctly shows the distribution of the different temperature values for each of the embankment surfaces. Its main disadvantage is that it has a low resolution and provides little information. If the slope of the embankment is complex, the results obtained are not satisfactory (Figure 27) [96].
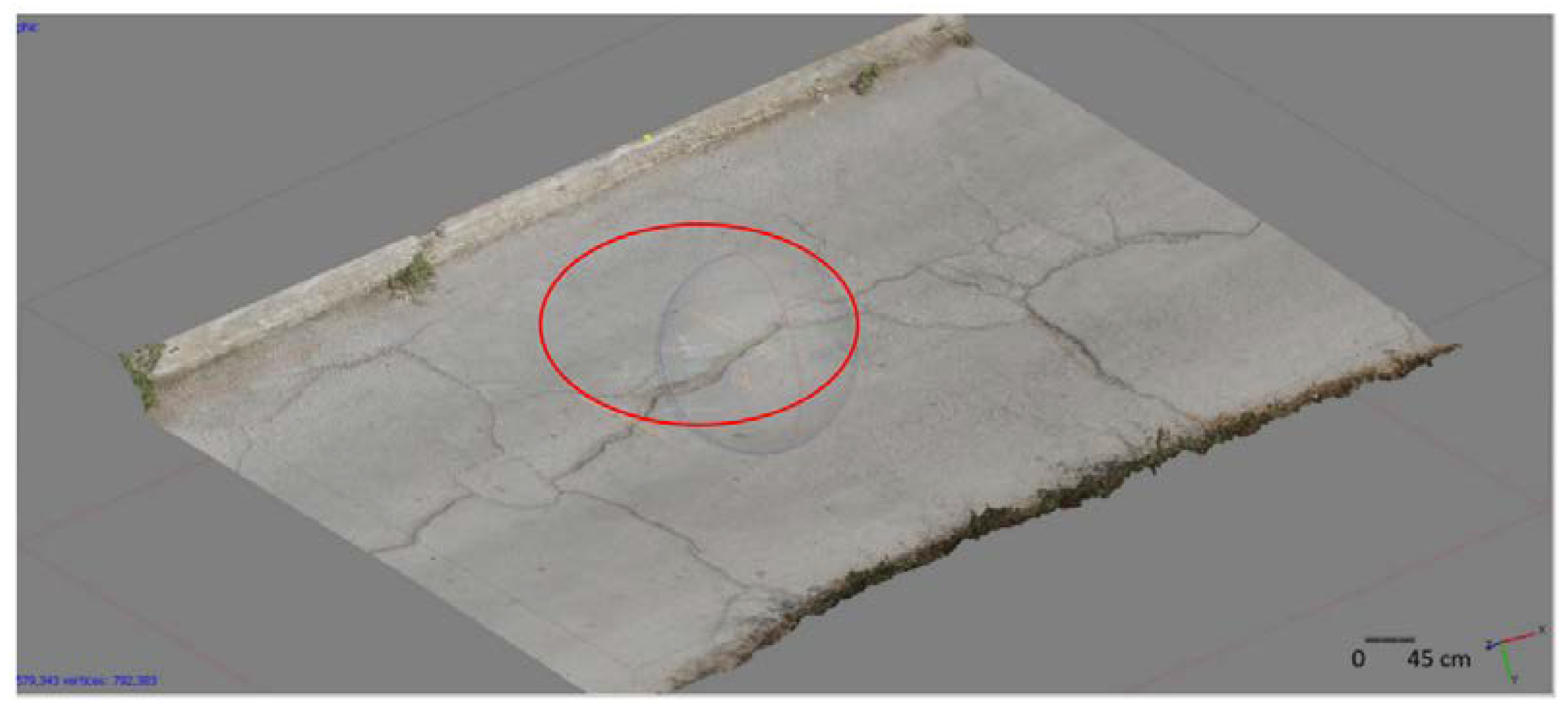
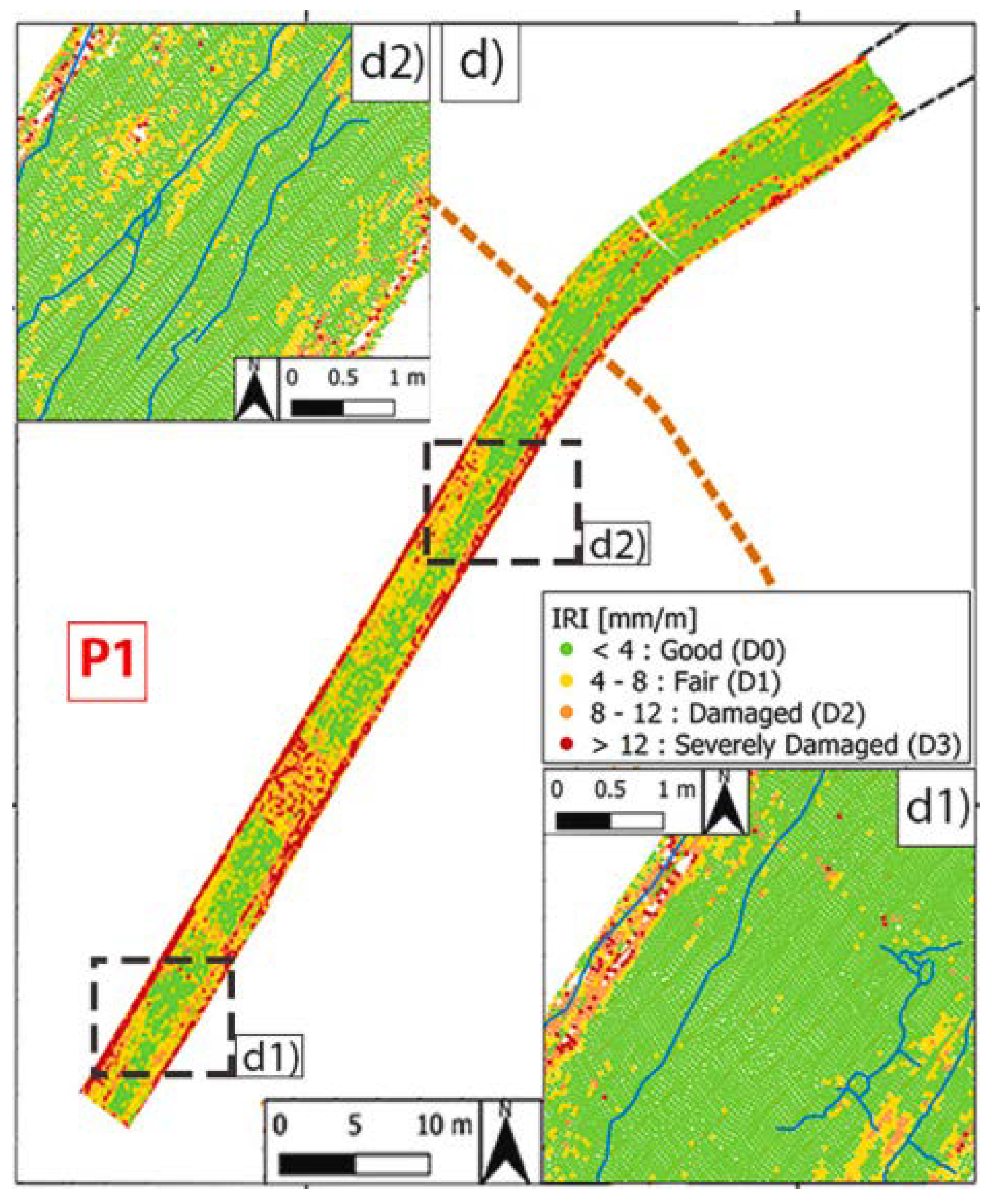
2.7. Road Inspection
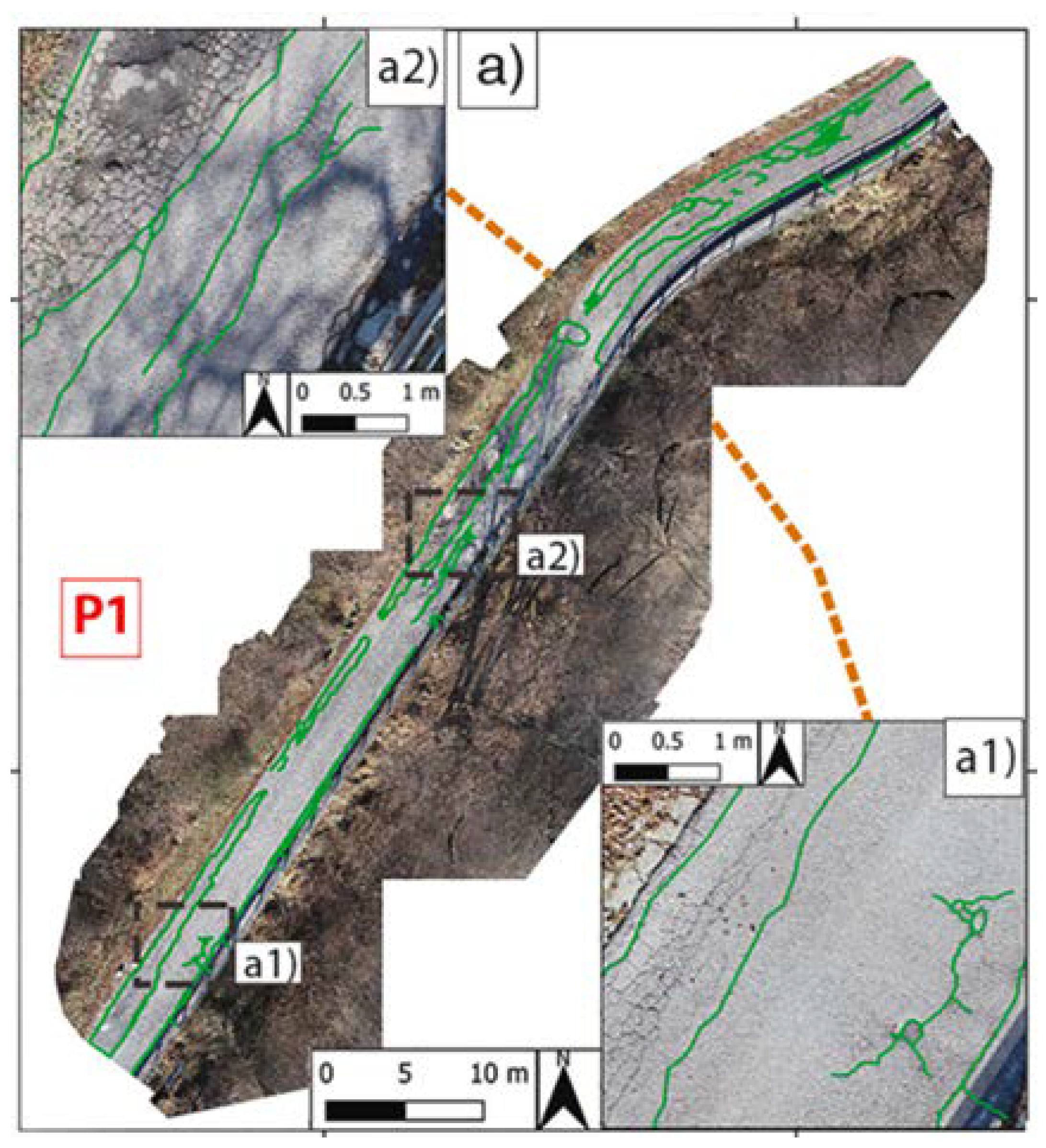
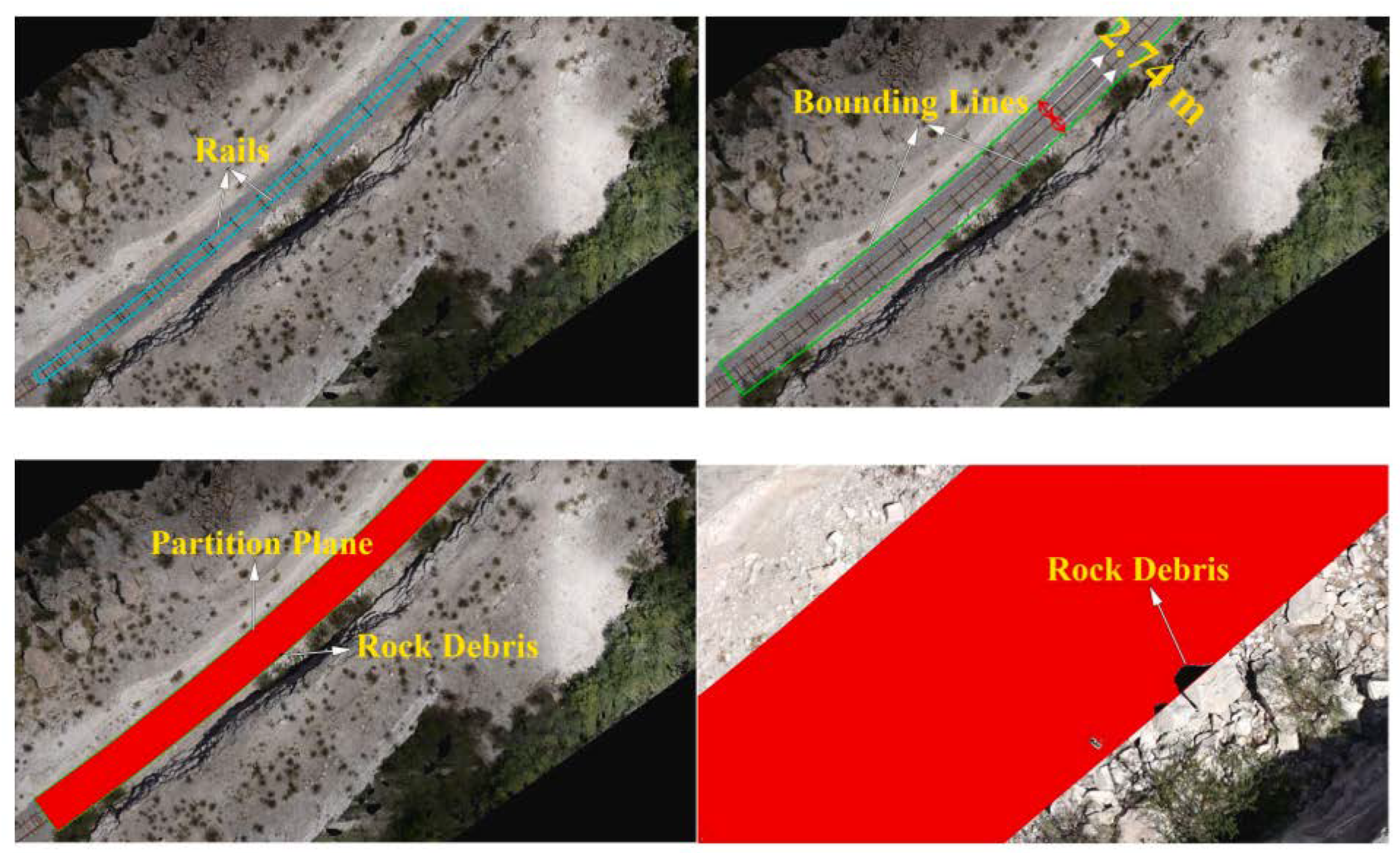
2.8. Slope Supervision and Maintenance
2.9. Monitoring of Landfill Operation
3. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Moschetta, J.M.; Namuduri, K. Introduction to UAV systems. In UAV Networks and Communications; John Wiley & Sons: Hoboken, NJ, USA, 2017; pp. 1–25. [Google Scholar]
- Choi, H.W.; Kim, H.J.; Kim, S.K.; Na, W.S. An Overview of Drone Applications in the Construction Industry. Drones 2023, 7, 515. [Google Scholar] [CrossRef]
- Guevara-Bonilla, M.; Meza-Leandro, A.S.; Esquivel-Segura, E.A.; Arias-Aguilar, D.; Tapia-Arenas, A.; Masís Meléndez, F. Uso de vehículos aéreos no tripulados (VANTs) para el monitoreo y manejo de los recursos naturales: Una síntesis. Rev. Tecnol. Marcha 2020, 33, 77–88. [Google Scholar] [CrossRef]
- Sun, J.; Yuan, G.; Song, L.; Zhang, H. Unmanned Aerial Vehicles (UAVs) in Landslide Investigation and Monitoring: A Review. Drones 2024, 8, 30. [Google Scholar] [CrossRef]
- Molina, A.A.; Huang, Y.; Jiang, Y. A Review of Unmanned Aerial Vehicle Applications in Construction Management: 2016–2021. Standards 2023, 3, 95–109. [Google Scholar] [CrossRef]
- John, B. Applications of UAV-Derived Digital Elevation Models in Terrain Analysis and Civil Engineering; Ladoke Akintola University of Technology: Ogbomoso, Nigeria, 2024. [Google Scholar]
- Drones de Ala Fija | DroneVision. Available online: https://www.dronevision.es/drones-de-ala-fija/ (accessed on 6 April 2025).
- Current Types of Drones | Javier Gómiz. Available online: https://javiergomiz.com/en/type-of-drones/ (accessed on 7 April 2025).
- Drones Para Manipular Las Líneas Eléctricas y Reducir Los Accidentes Laborales en Altura. Confederación de Empresarios de Andalucía. Available online: https://www.cea.es/drones-para-manipular-las-lineas-electricas-y-reducir-los-accidentes-laborales-en-altura/ (accessed on 6 April 2025).
- Hu, X.; Assaad, R.H. The use of unmanned ground vehicles (mobile robots) and unmanned aerial vehicles (drones) in the civil infrastructure asset management sector: Applications, robotic platforms, sensors, and algorithms. Expert Syst. Appl. 2023, 232, 120897. [Google Scholar] [CrossRef]
- 5 Beneficios de Usar Drones en Producciones Audiovisuales Málaga. Available online: https://photodrone.es/5-beneficios-de-usar-drones-en-producciones-audiovisuales-en-malaga/ (accessed on 6 April 2025).
- Greenwood, W.W.; Lynch, J.P.; Zekkos, D. Applications of UAVs in Civil Infrastructure. J. Infrastruct. Syst. 2019, 25, 04019002. [Google Scholar]
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Guizani, M.; Khreishah, A.; Guizani, M. Unmanned Aerial Vehicles (UAVs): A Survey on Civil Applications and Key Research Challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Nwaogu, J.M.; Yang, Y.; Chan, A.P.C.; Chi, H.L. Application of drones in the architecture, engineering, and construction (AEC) industry. Autom. Constr. 2023, 150, 104827. [Google Scholar]
- Rodríguez, M.V.; Melgar, S.G.; Cordero, A.S.; Márquez, J.M.A. A critical review of unmanned aerial vehicles (Uavs) use in architecture and urbanism: Scientometric and bibliometric analysis. Appl. Sci. 2021, 11, 9966. [Google Scholar] [CrossRef]
- Munawar, H.S.; Ullah, F.; Heravi, A.; Thaheem, M.J.; Maqsoom, A. Inspecting buildings using drones and computer vision: A machine learning approach to detect cracks and damages. Drones 2022, 6, 5. [Google Scholar] [CrossRef]
- Woo, H.J.; Hong, W.H.; Oh, J.; Baek, S.C. Defining Structural Cracks in Exterior Walls of Concrete Buildings Using an Unmanned Aerial Vehicle. Drones 2023, 7, 149. [Google Scholar] [CrossRef]
- Kong, X.; Smyl, D. Investigation of the condominium building collapse in Surfside, Florida: A video feature tracking approach. Structures 2021, 43, 533–545. [Google Scholar]
- Kerle, N.; Nex, F.; Gerke, M.; Duarte, D.; Vetrivel, A. UAV-Based Structural Damage Mapping: A Review. ISPRS Int. J. Geo-Inf. 2020, 9, 14. [Google Scholar] [CrossRef]
- Sucar, L.E.; Gómez, G. Vision Computacional; Instituto Nacional de Astrofísica, Óptica y Electrónica: Puebla, Mexico, 2011; p. 185. [Google Scholar]
- Peters, J.F. Foundations of Computer Vision. In Intelligent Systems Reference Library; Springer: Berlin/Heidelberg, Germany, 2017; Volume 124, p. 431. [Google Scholar]
- Ponce Cruz, P. Inteligencia Artificial con Aplicaciones a la Ingeniería; Alfaomega: Mexico City, Mexico, 2011; 376 p. [Google Scholar]
- Ertel, W. Introduction to Artificial Intelligence. In Lecture Notes in Civil Engineering; Springer: Berlin/Heidelberg, Germany, 2021; Volume 163, pp. 1–15. [Google Scholar]
- Ghosh, A.; Sufian, A.; Sultana, F.; Chakrabarti, A.; De, D. Fundamental concepts of convolutional neural network. In Intelligent Systems Reference Library; Springer: Berlin/Heidelberg, Germany, 2019; Volume 172, pp. 519–567. [Google Scholar]
- Wu, J. Introduction to Convolutional Neural Networks. Introd. Convolutional Neural Netw. 2017, 5, 495. [Google Scholar]
- Earthquake Engineering | Royal HaskoningDHV. Available online: https://www.royalhaskoningdhv.com/en/services/advanced-technology-and-research/earthquake-engineering (accessed on 6 April 2025).
- Tan, Y.; Li, G.; Cai, R.; Ma, J.; Wang, M. Automation in Construction Mapping and modelling defect data from UAV captured images to BIM for building external wall inspection. Autom. Constr. 2022, 139, 104284. [Google Scholar] [CrossRef]
- Huang, X.; Liu, Y.; Huang, L.; Stikbakke, S.; Onstein, E. BIM-supported drone path planning for building exterior surface inspection. Comput. Ind. 2023, 153, 104019. [Google Scholar] [CrossRef]
- ¿Qué es BIM? BuildingSMART Spanish Chapter. Available online: https://www.buildingsmart.es/bim/ (accessed on 15 June 2022).
- Congress, S.S.C.; Puppala, A.J.; Escamilla, J.; Jaladurgam, R.; Kumar, P. Transportation bridge infrastructure asset condition monitoring using uncrewed aerial vehicles (UAVs). Transp. Geotech. 2024, 47, 101268. [Google Scholar] [CrossRef]
- Seo, J.; Duque, L.; Wacker, J. Drone-enabled bridge inspection methodology and application. Autom. Constr. 2018, 94, 112–126. [Google Scholar]
- Humpe, A. Bridge inspection with an off-the-shelf 360° camera drone. Drones 2020, 4, 67. [Google Scholar] [CrossRef]
- Gkoumas, K.; Marques Dos Santos, F.L.; Van Balen, M.; Tsakalidis, A.; Ortega Hortelano, A.; Grosso, M.; Haq, G.; Pekár, F. Research and innovation in bridge maintenance, inspection and monitoring—A European perspective based on the Transport Research and Innovation Monitoring and Information System (TRIMIS). In JRC Science for Policy Report; JRC: Varese, Italy, 2019. [Google Scholar]
- Wang, J.; Zhang, S.; Guo, H.; Tian, Y.; Liu, S.; Du, C.; Wu, J. Stereoscopic monitoring of transportation infrastructure. Autom. Constr. 2024, 164, 105472. [Google Scholar] [CrossRef]
- Derseh, S.A.; Mohammed, T.A. Bridge structures under progressive collapse: A comprehensive state-of-theart-review. Results Eng. 2023, 18, 101090. [Google Scholar] [CrossRef]
- Crespi, P.; Zucca, M.; Valente, M. On the collapse evaluation of existing RC bridges exposed to corrosion under horizontal loads. Eng. Fail. Anal. 2020, 116, 104727. [Google Scholar]
- Ríos Insua, D.; Ceppi, C.; Meléndez, K.; José Molero, J. Cambio Climático, Fenómenos Meteorológicos Extremos Y Análisis De Riesgos. Rev. La Real Acad. Cienc. Exactas Físicas Y Naturales 2013, 106, 147–156. [Google Scholar]
- Scattarreggia, N.; Orgnoni, A.; Pinho, R.; Moratti, M.; Calvi, G.M. Numerical modelling of the impact of a falling object on a bridge deck. Eng. Fail. Anal. 2023, 148, 107229. [Google Scholar]
- Scattarreggia, N.; Galik, W.; Calvi, P.M.; Moratti, M.; Orgnoni, A.; Pinho, R. Analytical and numerical analysis of the torsional response of the multi-cell deck of a collapsed cable-stayed bridge. Eng. Struct. 2022, 265, 114412. [Google Scholar]
- Meroni, F.; Marradi, A.; Venturini, L.; Gennusa, G. Application of plastic-modified asphalt for the reconstruction of the Morandi Bridge in Genoa, Italy. In Plastic Waste for Sustainable Asphalt Roads, 1st ed.; Elsevier Ltd.: Amsterdam, The Netherlands, 2022; pp. 337–361. [Google Scholar]
- Sanchez-Cuevas, P.J.; Ramon-Soria, P.; Arrue, B.; Ollero, A.; Heredia, G. Robotic system for inspection by contact of bridge beams using UAVs. Sensors 2019, 19, 305. [Google Scholar] [CrossRef] [PubMed]
- Yang, J.; Li, H.; Zou, J.; Jiang, S.; Li, R.; Liu, X. Concrete crack segmentation based on UAV-enabled edge computing. Neurocomputing 2022, 485, 233–241. [Google Scholar]
- Ergen, M.; Saoud, B.; Shayea, I.; El-Saleh, A.A.; Ergen, O.; Inan, F.; Tuysuz, M.F. Edge computing in future wireless networks: A comprehensive evaluation and vision for 6G and beyond. ICT Express 2024, 10, 1151–1173. [Google Scholar]
- Taheri, J.; Deng, S. Edge computing: Models, technologies and applications. In Edge Computing; The Institution of Engineering and Technology: Stevenage, UK, 2020; pp. 1–453. [Google Scholar]
- Perry, B.J.; Guo, Y.; Atadero, R.; van de Lindt, J.W. Streamlined bridge inspection system utilizing unmanned aerial vehicles (UAVs) and machine learning. Measurement 2020, 164, 108048. [Google Scholar] [CrossRef]
- Ranjbar, H.; Forsythe, P.; Fini, A.A.F.; Maghrebi, M.; Waller, T.S. Addressing practical challenge of using autopilot drone for asphalt surface monitoring: Road detection, segmentation, and following. Results Eng. 2023, 18, 101130. [Google Scholar] [CrossRef]
- ¿Qué es el Modelado de Información de Puente (BrIM)? Available online: https://www.tekla.com/resources/blogs/bridge-information-modeling-brim-brings-bridge-engineering-to-the-modern-era-2 (accessed on 15 June 2022).
- Biscarini, C.; Catapano, I.; Cavalagli, N.; Ludeno, G.; Pepe, F.A.; Ubertini, F. UAV photogrammetry, infrared thermography and GPR for enhancing structural and material degradation evaluation of the Roman masonry bridge of Ponte Lucano in Italy. NDT E Int. 2020, 115, 102287. [Google Scholar] [CrossRef]
- Melgoso, S. Guía de la Termografía Infrarroja Aplicaciones en Ahorro y Eficiencia Energética. Available online: https://www.activatie.org/publicacion?319-Gu%C3%ADa-de-la-termograf%C3%ADa-infrarroja.-Aplicaciones-en-ahorro-y-eficiencia-energ%C3%A9tica- (accessed on 6 April 2025).
- Moreno, I. Tecnología de radar de penetración terrestre como herramienta para el estudio del patrimonio cultural y bienes inmuebles de arquitectura civil. Cienc. Y Tecnol. Desde La Perspect. Soc. 2014, 1–15. [Google Scholar]
- Jordan, S.; Moore, J.; Hovet, S.; Box, J.; Perry, J.; Kirsche, K.; Lewis, D.; Tse, Z.T.H. State-of-the-Art Technologies for UAV Inspections. 2017. Available online: https://www.ietdl.org (accessed on 6 April 2025).
- Mandirola, M.; Casarotti, C.; Peloso, S.; Lanese, I.; Brunesi, E.; Senaldi, I. Use of UAS for damage inspection and assessment of bridge infrastructures. Int. J. Disaster Risk Reduct. 2022, 72, 102824. [Google Scholar]
- Tian, Y.; Chen, C.; Sagoe-Crentsil, K.; Zhang, J.; Duan, W. Intelligent robotic systems for structural health monitoring: Applications and future trends. Autom. Constr. 2022, 139, 104273. [Google Scholar] [CrossRef]
- Na, W.S.; Baek, J. Impedance-based non-destructive testing method combined with unmanned aerial vehicle for structural health monitoring of civil infrastructures. Appl. Sci. 2017, 7, 104273. [Google Scholar]
- Hassani, S.; Dackermann, U. A Systematic Review of Advanced Sensor Technologies for Non-Destructive Testing and Structural Health Monitoring. Sensors 2023, 23, 2204. [Google Scholar] [CrossRef]
- Lavezzi, G.; Ciarcià, M.; Won, K.; Tazarv, M. A DIC-UAV based displacement measurement technique for bridge field testing. Eng. Struct. 2024, 308, 117951. [Google Scholar]
- Mostafaei, H.; Keshavarz, Z.; Rostampour, M.A.; Mostofinejad, D.; Wu, C. Sustainability Evaluation of a Concrete Gravity Dam: Life Cycle Assessment, Carbon Footprint Analysis, and Life Cycle Costing. Structures 2023, 53, 279–295. [Google Scholar]
- Zhao, S.; Kang, F.; Li, J.; Ma, C. Structural health monitoring and inspection of dams based on UAV photogrammetry with image 3D reconstruction. Autom. Constr. 2021, 130, 103832. [Google Scholar] [CrossRef]
- Ordieres, J.; Limas, M.; Ascacibar, F.J.; Alba-Elías, F.; González-Marcos, A.; Pernía-Espinoza, A.; Vergara, E. Técnicas y Algoritmos Básicos de Visión Artificial Recurso Electrónico—En Línea; Universidad de La Rioja: Logroño, Spain, 2006; 96p. [Google Scholar]
- Henríquez Sandoval, R. Modelo Para Detección de Grietas Incipientes en Vigas de Hormigón Armado en Base a Deep Learning. 2020. Available online: https://repositorio.uchile.cl/handle/2250/177848 (accessed on 1 April 2025).
- Zenmuse P1 | 45 MPx for Matrice 300 | ATyges®. Available online: https://atyges.es/en/tienda/product/zenmuse-p1/ (accessed on 6 April 2025).
- Sancho Gómez-Zurdo, R.; Galán Martín, D.; González-Rodrigo, B.; Marchamalo Sacristán, M.; Martínez Marín, R. Aplicación de la fotogrametría con drones al control deformacional de estructuras y terreno. Inf. La Constr. 2021, 73, e379. [Google Scholar] [CrossRef]
- Nyimbili, P.H.; Demirel, H.; Seker, D.Z.; Erden, T. Structure from Motion (SfM)—Approaches and Applications. Int. Sci. Conf. Appl. Sci. 2016, 27–30. [Google Scholar]
- Zhao, S.; Kang, F.; He, L.; Li, J.; Si, Y.; Xu, Y. Intelligent Structural Health Monitoring and Noncontact Measurement Method of Small Reservoir Dams Using UAV Photogrammetry and Anomaly Detection. Appl. Sci. 2024, 14, 9156. [Google Scholar] [CrossRef]
- Vista de Aplicación de la Fotogrametría con Drones al Control Deformacional de Estructuras y Terreno | Informes de la Construcción. Available online: https://informesdelaconstruccion.revistas.csic.es/index.php/informesdelaconstruccion/article/view/6050/7425 (accessed on 6 April 2025).
- Evans, A.D.; Gardner, K.H.; Greenwood, S.; Still, B. UAV and Structure-From-Motion Photogrammetry Enhance River Restoration Monitoring: A Dam Removal Study. Drones 2022, 6, 100. [Google Scholar] [CrossRef]
- Hinestroza Ramírez, D. El Machine Learning a Través de los Tiempos, y los Aportes a la Humanidad. Ph.D. Dissertation, Universidad Libre Seccional Pereira, Pereira, Colombia, 2018. [Google Scholar]
- Carmona, E. Tutorial Sobre Máquinas de Vector de Soporte (SVM). Dpto de Inteligencia Artificial, ETS de Ingeniería Informática, Universidad Nacional de Educación a Distancia (UNED). Available online: https://www.researchgate.net/publication/263817587_Tutorial_sobre_Maquinas_de_Vectores_Soporte_SVM (accessed on 27 November 2016).
- Liu, X.; Miao, X.; Jiang, H.; Chen, J. Data analysis in visual power line inspection: An in-depth review of deep learning for component detection and fault diagnosis. Annu. Rev. Control 2020, 50, 253–277. [Google Scholar]
- Shuang, F.; Han, S.; Li, Y.; Lu, T. RSIn-Dataset: An UAV-Based Insulator Detection Aerial Images Dataset and Benchmark. Drones 2023, 7, 125. [Google Scholar] [CrossRef]
- Mendu, B.; Mbuli, N. State-of-the-Art Review on the Application of Unmanned Aerial Vehicles (UAVs) in Power Line Inspections: Current Innovations, Trends, and Future Prospects. Drones 2025, 9, 265. [Google Scholar] [CrossRef]
- Czum, J.M. Dive Into Deep Learning. J. Am. Coll. Radiol. 2020, 17, 637–638. [Google Scholar]
- Amin, A.A.; Sajid Iqbal, M.; Hamza Shahbaz, M. Development of Intelligent Fault-Tolerant Control Systems with Machine Learning, Deep Learning, and Transfer Learning Algorithms: A Review. Expert Syst. Appl. 2024, 238, 121956. [Google Scholar]
- Lin, T. Title page Federated recommender systems based on deep learning: The experimental. Expert Syst. Appl. 2023, 239, 122440. [Google Scholar]
- Chen, Y.; Lin, J.; Liao, X. Early detection of tree encroachment in high voltage powerline corridor using growth model and UAV-borne LiDAR. Int. J. Appl. Earth Obs. Geoinf. 2022, 108, 76. [Google Scholar]
- Guan, H.; Sun, X.; Su, Y.; Hu, T.; Wang, H.; Wang, H.; Peng, C.; Guo, Q. UAV-lidar aids automatic intelligent powerline in-spection. Int. J. Electr. Power Energy Syst. 2021, 130, 106987. [Google Scholar] [CrossRef]
- Lohani, B.; Ghosh, S. Airborne LiDAR Technology: A Review of Data Collection and Processing Systems. Proc. Natl. Acad. Sci. India Sect. A Phys. Sci. 2017, 87, 567–579. [Google Scholar] [CrossRef]
- Center NO and AANCS. Lidar 101: An Introduction to Lidar Technology, Data, and Applications. NOAA Coast. Serv. Cent. 2012, 76. [Google Scholar]
- Martínez Blanco, M. Evaluación y Propuesta de Metodologías de Clasificación a Partir del Procesado Combinado de Datos LiDAR e Imágenes Aéreas Georreferenciadas. 2016. Available online: https://repositorio.unican.es/xmlui/handle/10902/8339 (accessed on 1 April 2025).
- Cueva, V.; Ruiz, T. Estudio probabilistico de modelos de difusión tipo richards.
- Guerrero Liquet, G.C.; García Cascales, M.S.; Sánchez Lozano, J.M. Dron Technology Applied to the Management of Photovoltaic Solar Plants to Optimize the Project. In Proceedings of the 22nd International Congress on Project Management and Engineering, Madrid, Spain, 7–9 July 2018; pp. 1511–1519. [Google Scholar]
- Zefri, Y.; Elkettani, A.; Sebari, I.; Lamallam, S.A. Thermal infrared and visual inspection of photovoltaic installations by uav photogrammetry—Application case: Morocco. Drones 2018, 2, 41. [Google Scholar] [CrossRef]
- Le, M.; Le, D.V.; Ha Thi Vu, H. Thermal inspection of photovoltaic modules with deep convolutional neural networks on edge devices in AUV. Measurement 2023, 218, 113135. [Google Scholar] [CrossRef]
- Tanda, G.; Migliazzi, M. Infrared thermography monitoring of solar photovoltaic systems: A comparison between UAV and aircraft remote sensing platforms. Therm. Sci. Eng. Prog. 2024, 48, 102379. [Google Scholar] [CrossRef]
- López-Fernández, L.; Lagüela, S.; Fernández, J.; González-Aguilera, D. Automatic evaluation of photovoltaic power stations from high-density RGB-T 3D point clouds. Remote Sens. 2017, 9, 631. [Google Scholar] [CrossRef]
- Pix4DMapper. Pix4D Mapper Getting Started Manual. Available online: https://support.pix4d.com/hc/en-us/articles/202557359 (accessed on 6 April 2025).
- Dronova, I.; Kislik, C.; Dinh, Z.; Kelly, M. A review of unoccupied aerial vehicle use in wetland applications: Emerging opportunities in approach, technology, and data. Drones 2021, 5, 45. [Google Scholar] [CrossRef]
- Cao, J.; Leng, W.; Liu, K.; Liu, L.; He, Z.; Zhu, Y. Object-Based mangrove species classification using unmanned aerial vehicle hyperspectral images and digital surface models. Remote Sens. 2018, 10, 89. [Google Scholar] [CrossRef]
- Li, Q.S.; Wong, F.K.K.; Fung, T. Assessing the utility of UAV-borne hyperspectral image and photogrammetry derived 3D data for wetland species distribution quick mapping. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences—ISPRS. Archives 2017, 42, 209–215. [Google Scholar]
- Erwin, K.L. Wetlands and global climate change: The role of wetland restoration in a changing world. Wetl. Ecol. Manag. 2009, 17, 71–84. [Google Scholar] [CrossRef]
- Salimi, S.; Almuktar, S.A.A.A.N.; Scholz, M. Impact of climate change on wetland ecosystems: A critical review of experimental wetlands. J. Environ. Manag. 2021, 286, 112160. [Google Scholar] [CrossRef] [PubMed]
- Koparan, C.; Koc, A.B.; Sawyer, C.; Privette, C. Temperature profiling of waterbodies with a uav-integrated sensor subsystem. Drones 2020, 4, 35. [Google Scholar] [CrossRef]
- Troy, C.D.; Cheng, Y.T.; Lin, Y.C.; Habib, A. Rapid lake Michigan shoreline changes revealed by UAV LiDAR surveys. Coast. Eng. 2021, 170, 104008. [Google Scholar] [CrossRef]
- Velasco, J.; Molina, I.; Martinez, E.; Arquero, Á.; Prieto, J.F. Sea bottom classification by means of bathymetric LIDAR data. IEEE Lat. Am. Trans. 2014, 12, 590–595. [Google Scholar] [CrossRef]
- Beltran Clavijo, K.L.; Forero Buitrago, J.S. Actualización del plan de manejo ambiental en el humedal Neuta del municipio de Soacha-Cundinamarca. Trabajo de Grado en la modalidad de innovación-investigación para. Cundinamarca PHDE. Delimitar la cota máxima de inundación para humedales de cundinamarca. 2017. [Google Scholar]
- Su, H.; Ma, J.; Zhou, R.; Wen, Z. Detect and identify earth rock embankment leakage based on UAV visible and infrared images. Infrared Phys. Technol. 2022, 122, 104105. [Google Scholar]
- Chinese Truck Drivers Crash Rock-Laden Vehicles into Yangtze River to Try to Halt Floods Destroying Riverbank | South China Morning Post. Available online: https://www.scmp.com/news/china/society/article/1988313/chinese-truck-drivers-crash-rock-laden-vehicles-yangtze-river-try (accessed on 6 April 2025).
- Cruz-León, J. Implementación del detector y descriptor SURF en dispositivos móviles con sistema operativo Android. 2014, 5, 5232–5237. [Google Scholar]
- Koutalakis, P.; Tzoraki, O.; Zaimes, G. Uavs for hydrologic scopes: Application of a low-cost UAV to estimate surface water velocity by using three different image-based methods. Drones 2019, 3, 14. [Google Scholar] [CrossRef]
- Düzgün, N.E. Particle Image Velocimetry Applications in Complex Flow Systems. Ph.D. Thesis, Universitat Rovira i Virgili, Catalonia, Spain, 2012. [Google Scholar]
- Sokoray-Varga, B.; Józsa, J. Particle tracking velocimetry (PTV) and its application to analyse free surface flows in laboratory scale models. Period. Polytech. Civ. Eng. 2008, 52, 63–71. [Google Scholar] [CrossRef]
- Tsubaki, R. On the Texture Angle Detection Used in Space-Time Image Velocimetry (STIV). Water Resour. Res. 2017, 53, 10908–10914. [Google Scholar] [CrossRef]
- Biçici, S.; Zeybek, M. An approach for the automated extraction of road surface distress from a UAV-derived point cloud. Autom. Constr. 2021, 122, 103475. [Google Scholar] [CrossRef]
- Inzerillo, L.; Di Mino, G.; Roberts, R. Image-based 3D reconstruction using traditional and UAV datasets for analysis of road pavement distress. Autom. Constr. 2018, 96, 457–469. [Google Scholar] [CrossRef]
- Nappo, N.; Mavrouli, O.; Nex, F.; van Westen, C.; Gambillara, R.; Michetti, A.M. Use of UAV-based photogrammetry products for semi-automatic detection and classification of asphalt road damage in landslide-affected areas. Eng. Geol. 2021, 294, 106363. [Google Scholar] [CrossRef]
- Wilde, W.J. Implementation of an International Roughness Index for Mn/DOT Pavement Construction and Rehabilitation. 2007. [Google Scholar]
- Arriaga Patiño, M.C.; Anguas, P.G.; Rico Rodriguez, A. Índice Internacional de Rugosidad en la Red Carretera de México; Instituto Mexicano del Transporte: Santiago de Querétaro, Mexico, 1998; Volume 108, pp. 1–57. [Google Scholar]
- Yamashiro, D.; Choh, H.L.; Ramasharma, K.; Sairam, M.R. Synthesis and biological activity of human inhibin-like peptide (1-31). In Proceedings of the National Academy of Sciences of the United States of America, Washington, DC, USA, 9 April 1984; Volume 18, pp. 5399–5402. [Google Scholar]
- Tomás, R. Aplicaciones de la interferometría radar de satélite en ingeniería civil Applications of satellite radar interferometry in civil engineering. Public Work. Manag. Policy 2022, 3635, 97–103. [Google Scholar]
- Congress, S.S.C.; Puppala, A.J. Geotechnical slope stability and rockfall debris related safety assessments of rock cuts adjacent to a rail track using aerial photogrammetry data analysis. Transp. Geotech. 2021, 30, 100595. [Google Scholar]
- Gordan, M.; Ismail, Z.; Ghaedi, K.; Ibrahim, Z.; Hashim, H.; Ghayeb, H.H.; Talebkhah, M. A Brief Overview and Future Perspective of Unmanned Aerial Systems for In-Service Structural Health Monitoring. Eng. Adv. 2021, 24, 9–15. [Google Scholar] [CrossRef]
- Sony, S.; Laventure, S.; Sadhu, A. A literature review of next-generation smart sensing technology in structural health monitoring. In Structural Control and Health Monitoring; John Wiley and Sons Ltd.: Hoboken, NJ, USA, 2019; Volume 26. [Google Scholar]
- Baiocchi, V.; Napoleoni, Q.; Tesei, M.; Servodio, G.; Alicandro, M.; Costantino, D. UAV for monitoring the settlement of a landfill. Eur. J. Remote Sens. 2019, 52, 41–52. [Google Scholar] [CrossRef]
- Mello CCde, S.; Salim, D.H.C.; Simões, G.F. UAV-based landfill operation monitoring: A year of volume and topographic measurements. Waste Manag. 2022, 137, 253–263. [Google Scholar] [CrossRef]
- García-Álvarez, D.A. Sistema GNSS (Global Navigation Satelite System). 2008. Available online: http://arantxa.ii.uam.es/~jms/pfcsteleco/lecturas/20080125DavidGarcia.pdf (accessed on 15 April 2025).
- Bern, L.; Bel, V.A.; Juli, A.; Vill, N.G. GNSS. In GPS: Fundamentos y Aplicaciones en Geomática; Valencia Polytechnic University Press: Valencia, Spain, 2014. [Google Scholar]
- Wells, J.L.; Lovelace, B.; Kalar, T. Use of unmanned aircraft systems for bridge inspections. Transp. Res. Rec. 2017, 2612, 60–66. [Google Scholar] [CrossRef]
- Feroz, S.; Dabous, S.A. Uav-based remote sensing applications for bridge condition assessment. Remote Sens. 2021, 13, 1809. [Google Scholar] [CrossRef]
- Akay, S.S.; Özcan, O.; Özcan, O.; Yetemen, Ö. Efficiency analysis of solar farms by UAV-based thermal monitoring. Eng. Sci. Technol. 2024, 53, 101688. [Google Scholar] [CrossRef]
- Zhao, N.; Huangfu, Y.; Zhang, Y.; Yue, Q. Consider no-fly zones and calculate unloading UAV power line autonomous patrol track planning technology. In Proceedings of the Seventh International Conference on Mechatronics and Intelligent Robotics 2023, Wuhan, China, 11 September 2023; Volume 12779, pp. 16–21. [Google Scholar]
- Mardanshahi, A.; Sreekumar, A.; Yang, X.; Kumar Barman, S.; Chronopoulos, D. Sensing Techniques for Structural Health Monitoring: A State-of-the-Art Review on Performance Criteria and New-Generation Technologies 2025. Available online: https://creativecommons.org/licenses/by/4.0/ (accessed on 1 April 2025).

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Theme | Keywords |
|---|---|
| Drones | “UAV” “RPAS” “Drones” |
| Civil Eng. Applications | “Civil Engineering Applications” |
| Building | “UAV Building Inspection” “UAV Buildings” “Drones AND Building Inspection” |
| Bridges | “UAV Bridge Inspection” “Drones Bridge” |
| Dams | “Dam Inspections UAV” “UAV Dams” “Drones AND Dams AND Engineering” |
| Electrical/solar installations | “UAV Power Lines” “UAV Solar Panels” “Drones AND Photovoltaic” |
| Hydrology | “UAV Water” “UAV River studies” |
| Road | “UAV Road Monitoring/Inspection” “Drones AND Road Inspection” |
| Embankments | “UAV Slope Stability” |
| Application | Advantages | Limitations | Future Applications |
|---|---|---|---|
| 1. Building Inspection | Automated crack detection, integration with BIM models, and reduction in costs and occupational risks. | Sensitivity to light and weather conditions and dependence on evolving AI algorithms. | Full UAV-BIM integration for predictive maintenance and early detection with advanced deep learning. |
| 2. Bridge Inspection | Access to hard-to-reach areas, accurate 3D models, safer, and more economical inspections. | Limitations with adverse weather conditions and difficulty in inspection under certain geometries. | Digital Twin models, autonomous inspection with 360° cameras, and real-time AI. |
| 3. Dams | High-resolution 3D models, continuous monitoring, cost reduction, and less human risk. | Difficulty in detecting millimetric displacements and need for control points in the field. | Real-time monitoring and predictive detection of structural failures using AI and deep learning. |
| 4. Power Line Inspection | Efficient fault detection, low cost compared to traditional methods, increased personnel safety. | Limited recognition of component types, errors in automated detection, and on-site verification required. | Fully autonomous inspection with scheduled air routes and predictive fault analysis. |
| 5. Inspection of photovoltaic plants | Fast and massive inspection, identification of thermal and visual defects, and improvement of energy efficiency. | Need for accurate calibration for thermal detection and sensitivity to weather conditions. | Real-time performance monitoring and the use of UAVs for automated preventive maintenance. |
| 6. Hydrological studies | Rapid environmental monitoring, high spatial resolution, and access to remote or fragile areas. | Cost of advanced sensors, reliance on post-processing techniques, and limited resolution in areas with dense vegetation. | Automated monitoring of physicochemical parameters and predictive modeling of environmental impacts. |
| 7. Road inspection | Damage detection automation, detailed 3D models, and maintenance planning improvement. | Problems with shiny or shaded surfaces and need to supplement with additional data (InSAR, field). | Integration with displacement sensors, dynamic repair planning, and road closures. |
| 8. Slope supervision and maintenance | Accurate stability assessment, safety zone planning, and landslide prevention. | Periodic repetition of flights and difficulty in areas with dense vegetation or unstable rocks. | Continuous monitoring with predictive analysis of geotechnical risk and simulation in digital twins. |
| 9. Monitoring the operation of the landfill | Economic topographic monitoring, monitoring of settlements and emissions, and support in geotechnical decisions. | Need for GNSS or GCP for high accuracy, still low current usage percentage, and limitations in full automation. | Automation of topographic monitoring and analysis and real-time environmental control using AI. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Villarino, A.; Valenzuela, H.; Antón, N.; Domínguez, M.; Méndez Cubillos, X.C. UAV Applications for Monitoring and Management of Civil Infrastructures. Infrastructures 2025, 10, 106. https://doi.org/10.3390/infrastructures10050106
Villarino A, Valenzuela H, Antón N, Domínguez M, Méndez Cubillos XC. UAV Applications for Monitoring and Management of Civil Infrastructures. Infrastructures. 2025; 10(5):106. https://doi.org/10.3390/infrastructures10050106
Chicago/Turabian StyleVillarino, Alberto, Hugo Valenzuela, Natividad Antón, Manuel Domínguez, and Ximena Celia Méndez Cubillos. 2025. "UAV Applications for Monitoring and Management of Civil Infrastructures" Infrastructures 10, no. 5: 106. https://doi.org/10.3390/infrastructures10050106
APA StyleVillarino, A., Valenzuela, H., Antón, N., Domínguez, M., & Méndez Cubillos, X. C. (2025). UAV Applications for Monitoring and Management of Civil Infrastructures. Infrastructures, 10(5), 106. https://doi.org/10.3390/infrastructures10050106