
Smart Emergency EV-to-EV Portable Battery Charger

 ,
, 
Abstract
:1. Introduction
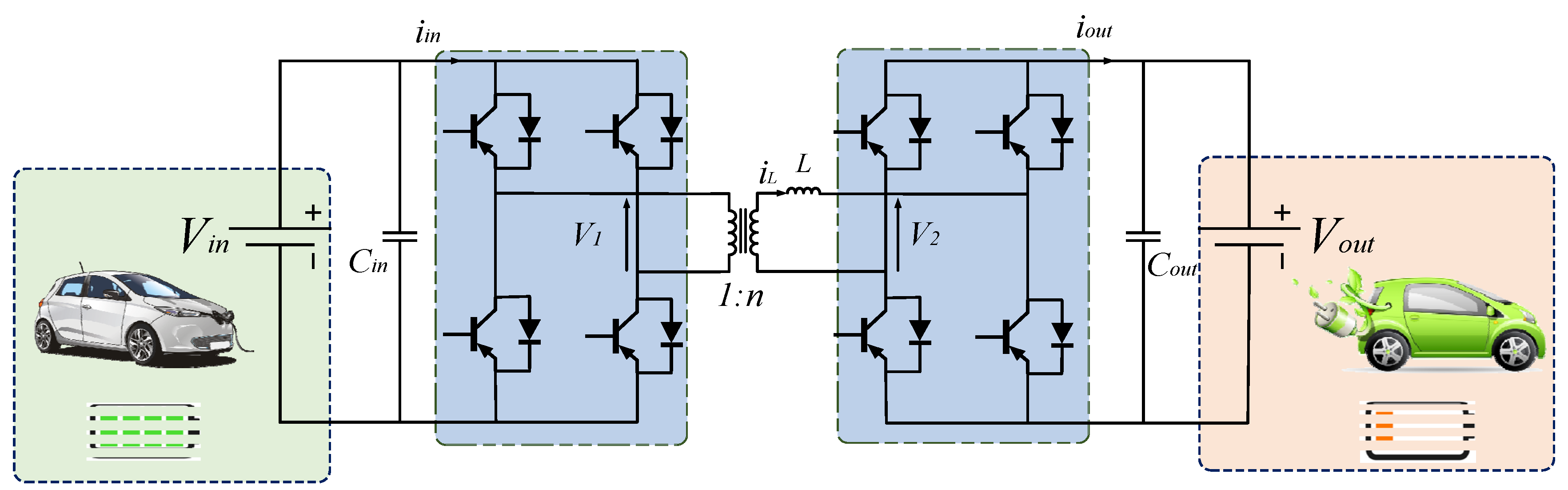
2. Power Structure of the Proposed EPBC
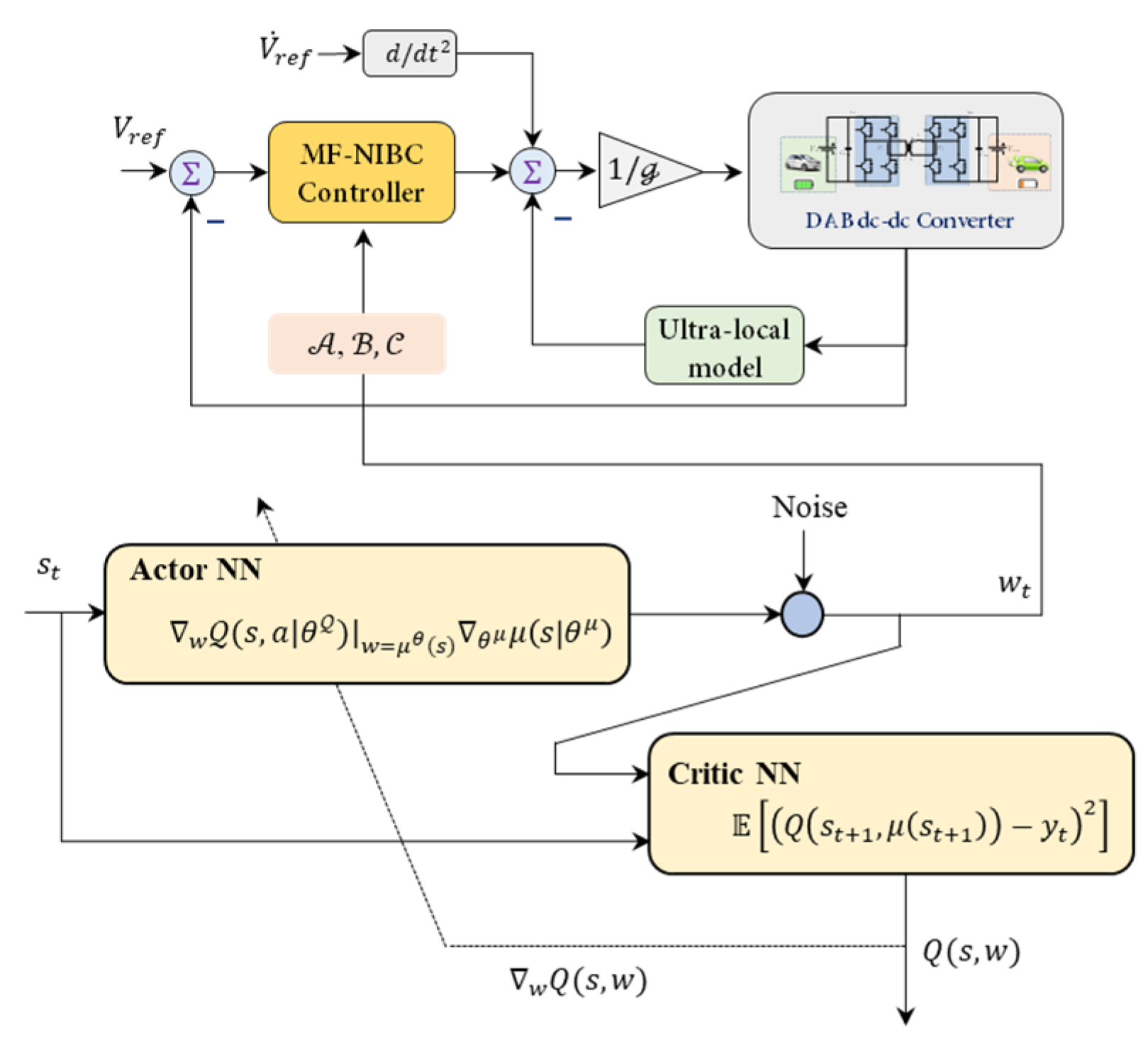
3. Design of Novel Assorted Nonlinear Controller Based on Deep Reinforcement Learning
3.1. Formulation of Model Free-Integral Backstepping Control (MF-NIBC) Approach
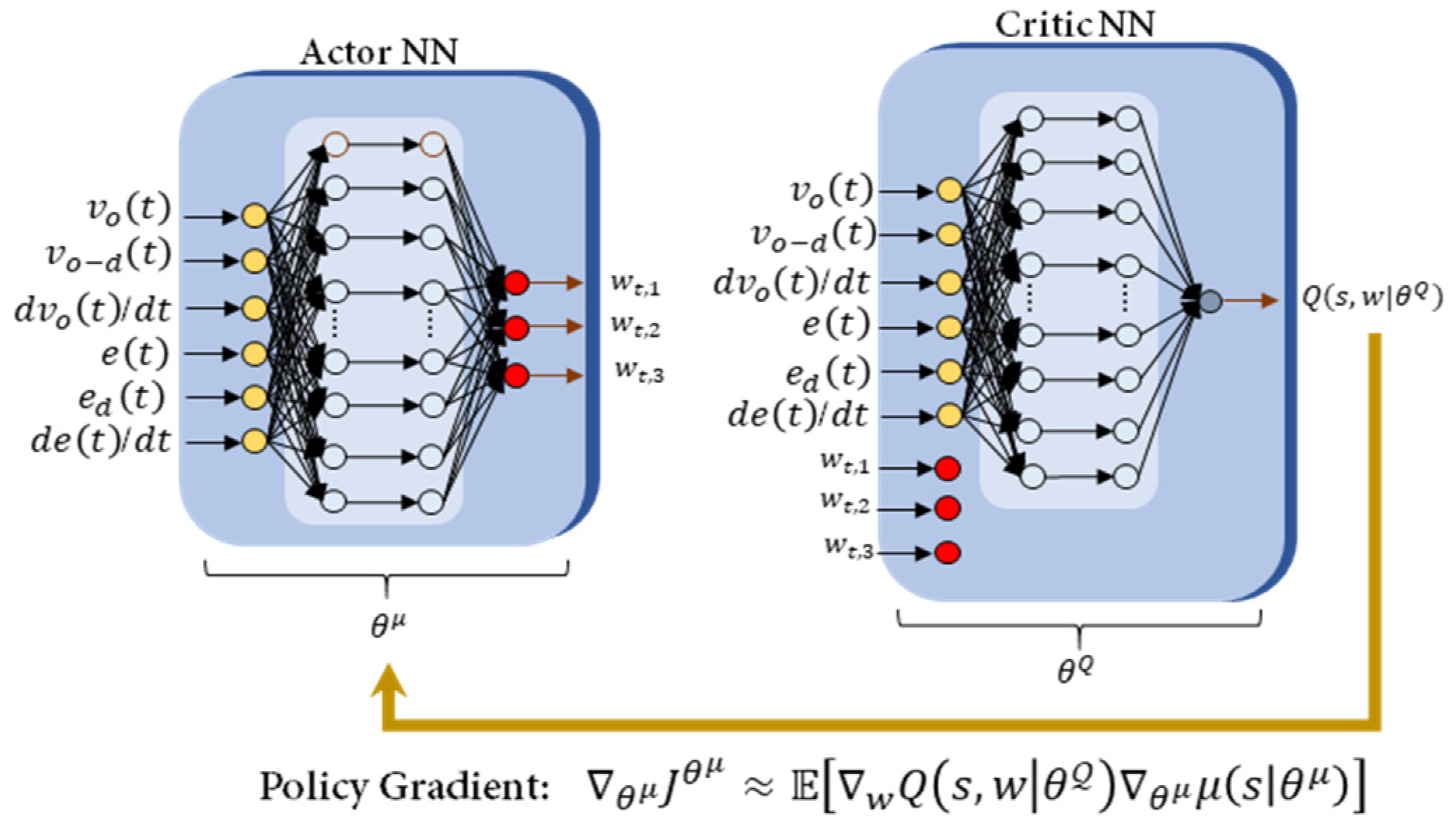
3.2. Deep Deterministic Policy Gradient Methodology
| Algorithm 1: Procedure of the DDPG algorithm. |
| 1: Randomly initialize critic and actor networks with weights and 2: Initialize target networks and with weights , 3: Set up empty replay buffer 4: for episode = to do 5: Begin with an Ornstein-Uhelnbeck (OU) noise for exploration 6: Receive initial observation state 7: for t = to do 8: Apply action to environment 9: Observe next state and reward 10: Store following transitions into replay buffer 11: Sample random minibatch of transitions from 12: Set 13: Update critic by the loss: 14: Update the actor policy using the sampled policy gradient: 15: Update the target networks: 16: end for 17: end for |
3.3. Optimizing the Key Coefficients of MF-NIBC
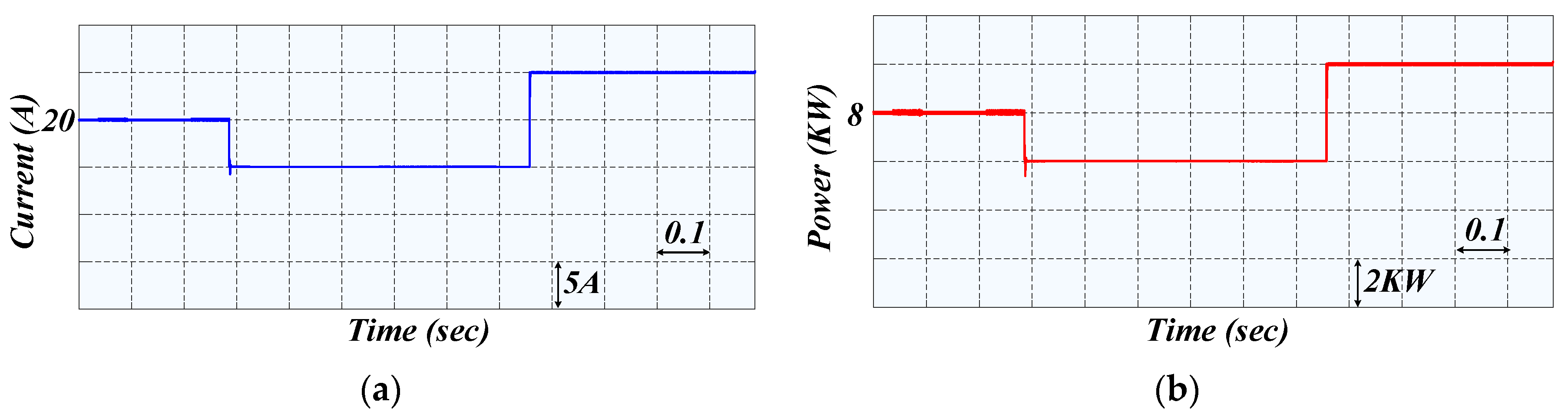
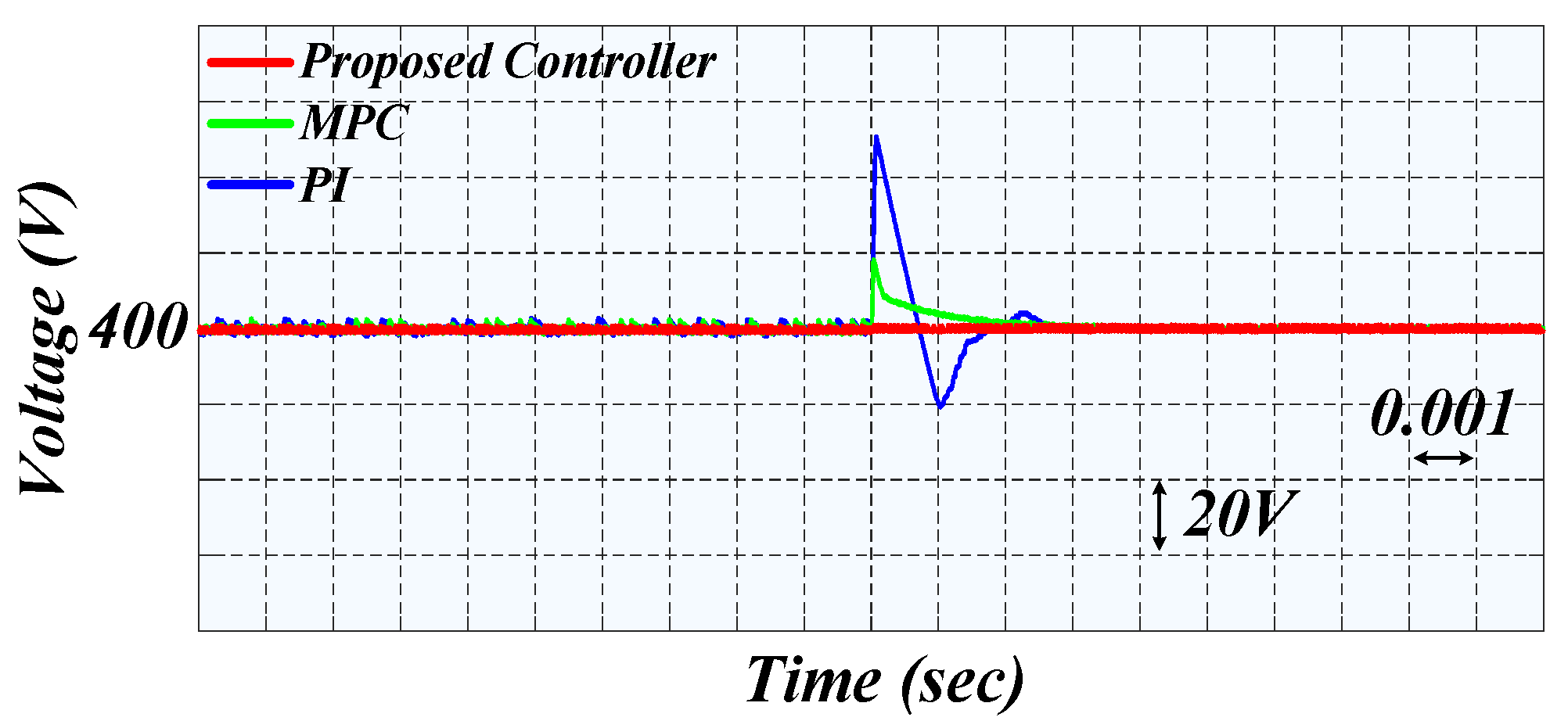
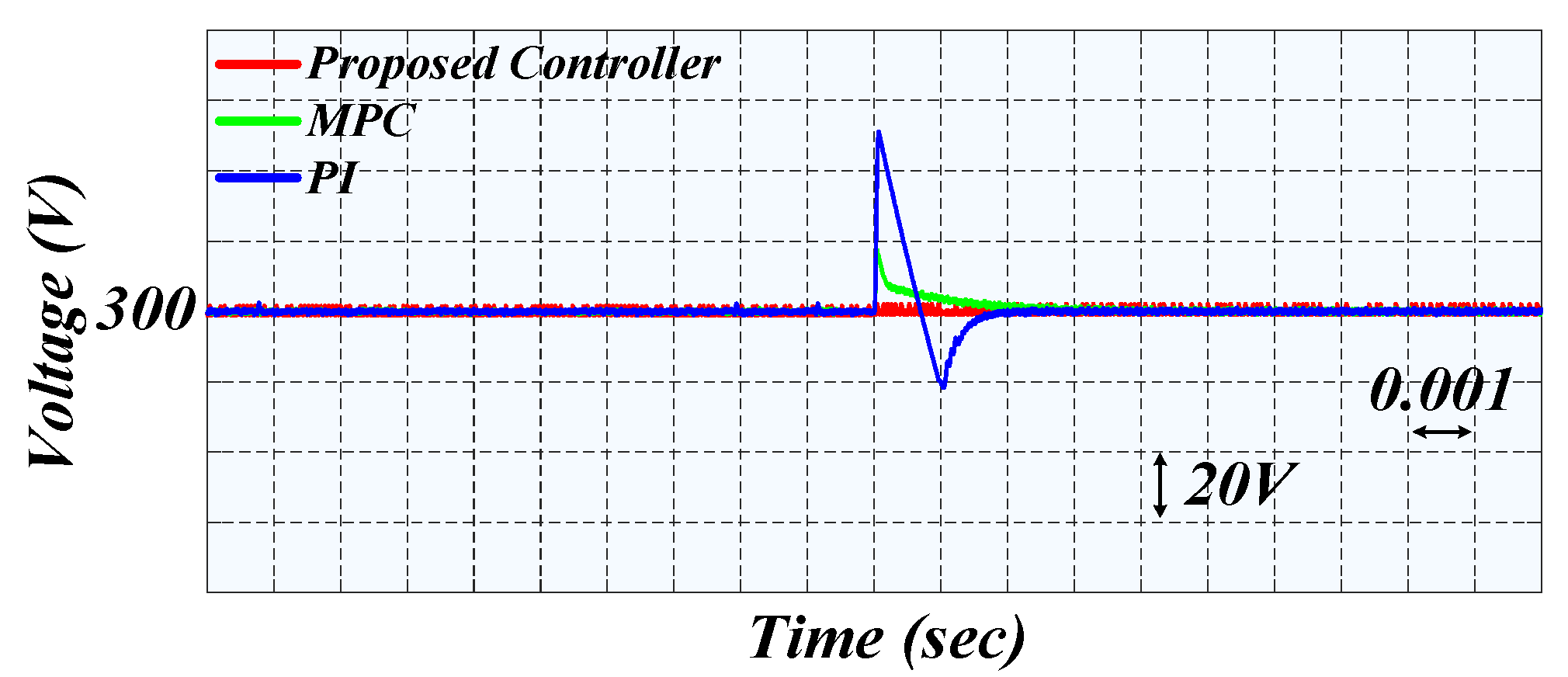
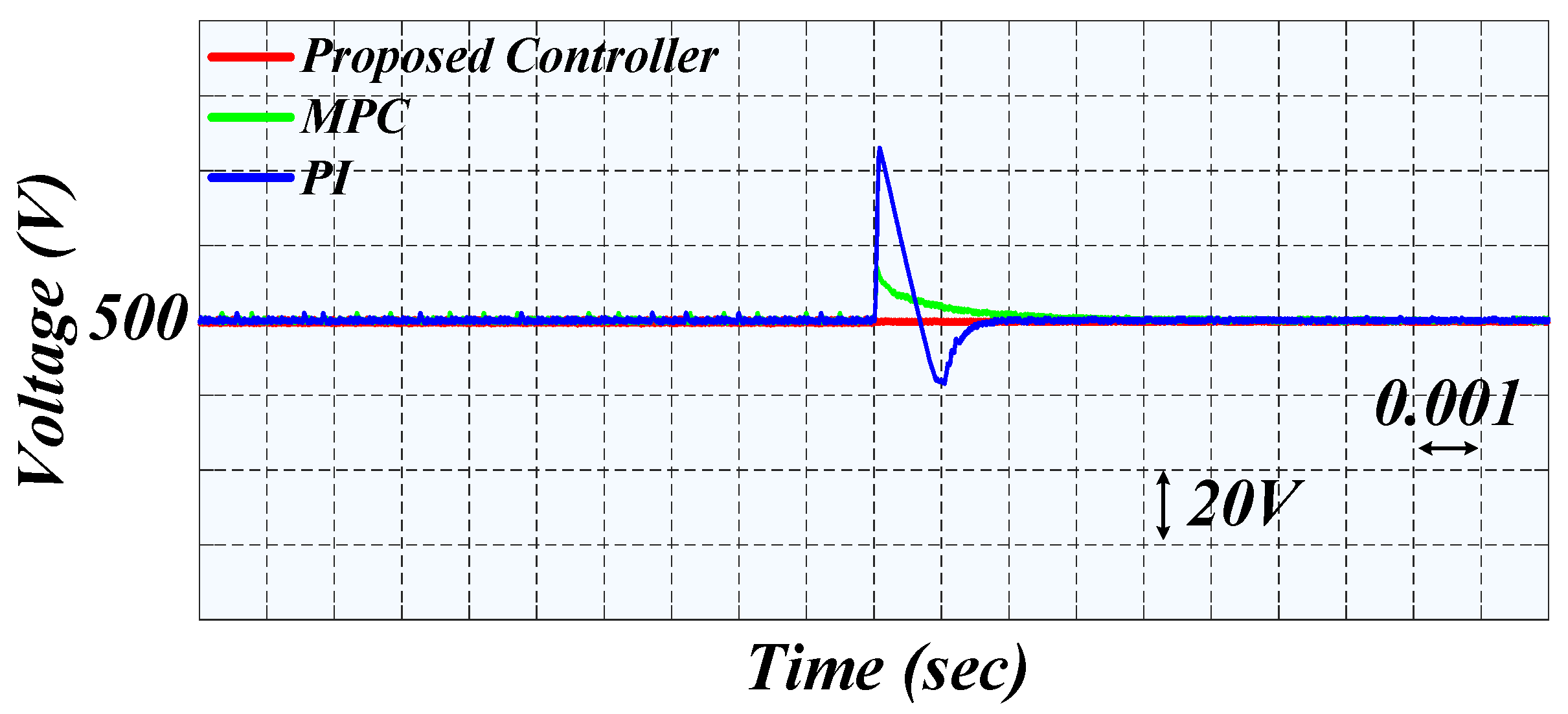
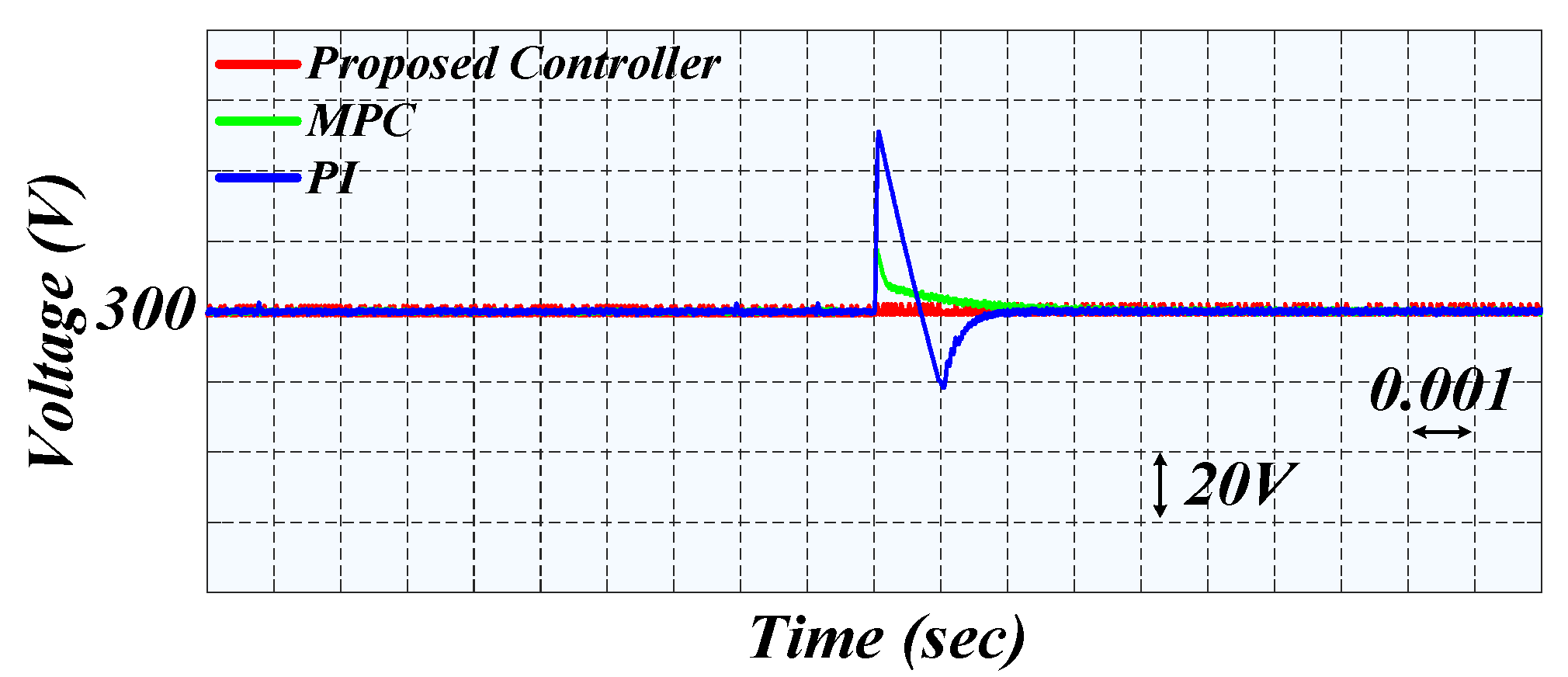
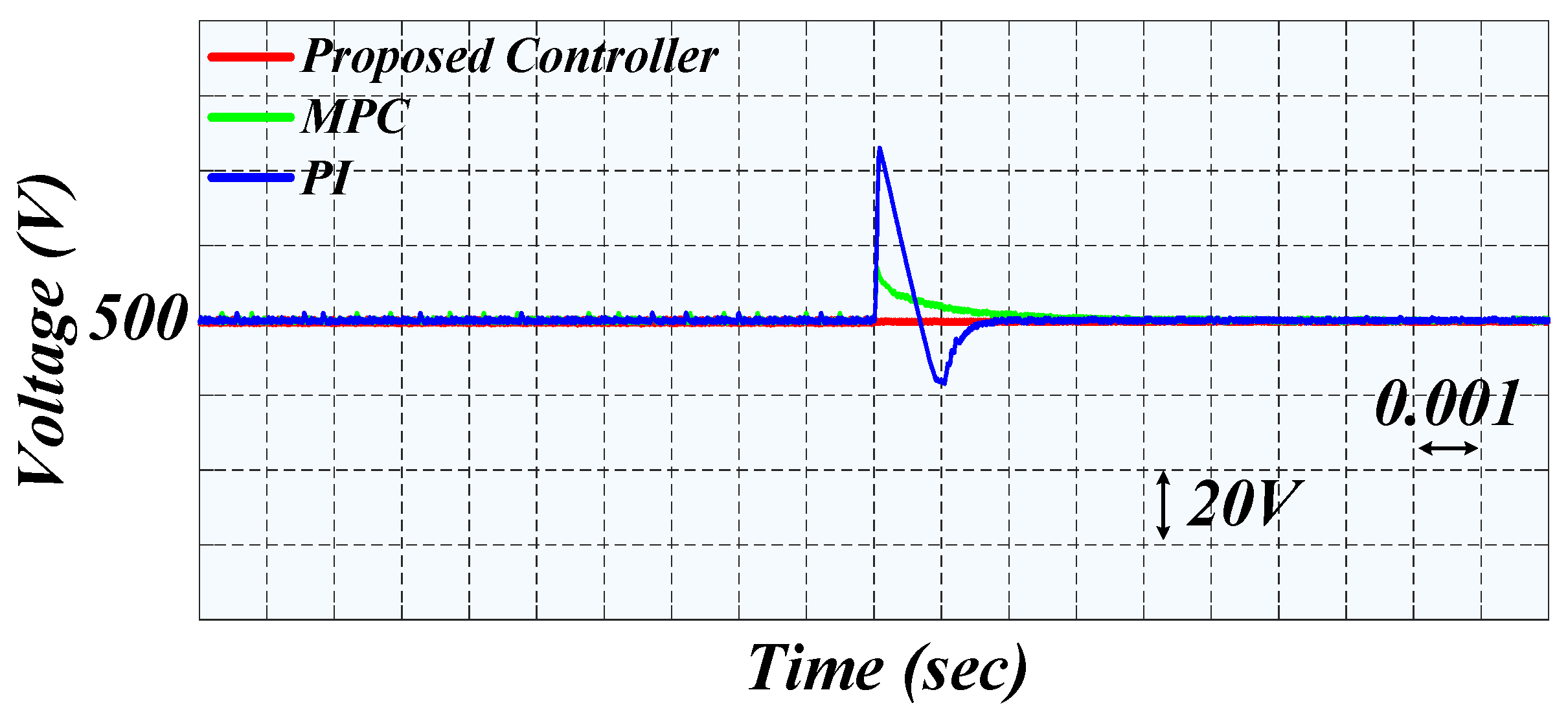
4. Performance Evaluation
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Iyer, V.M.; Gulur, S.; Gohil, G.; Bhattacharya, S. Extreme fast charging station architecture for electric vehicles with partial power processing. In Proceedings of the 2018 IEEE Applied Power Electronics Conference and Exposition (APEC), San Antonio, TX, USA, 4–8 March 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 659–665. [Google Scholar]
- Fuinhas, J.A.; Koengkan, M.; Leitão, N.C.; Nwani, C.; Uzuner, G.; Dehdar, F.; Relva, S.; Peyerl, D. Effect of Battery Electric Vehicles on Greenhouse Gas Emissions in 29 European Union Countries. Sustainability 2021, 13, 13611. [Google Scholar] [CrossRef]
- Gryparis, E.; Papadopoulos, P.; Leligou, H.C.; Psomopoulos, C.S. Electricity demand and carbon emission in power generation under high penetration of electric vehicles. A European Union perspective. Energy Rep. 2020, 6, 475–486. [Google Scholar] [CrossRef]
- Asna, M.; Shareef, H.; Achikkulath, P.; Mokhlis, H.; Errouissi, R.; Wahyudie, A. Analysis of an Optimal Planning Model for Electric Vehicle Fast-Charging Stations in Al Ain City, United Arab Emirates. IEEE Access 2021, 9, 73678–73694. [Google Scholar] [CrossRef]
- Tu, H.; Feng, H.; Srdic, S.; Lukic, S. Extreme fast charging of electric vehicles: A technology overview. IEEE Trans. Transp. Electrif. 2019, 5, 861–878. [Google Scholar] [CrossRef]
- Krishna, G. Understanding and identifying barriers to electric vehicle adoption through thematic analysis. Transp. Res. Interdiscip. Perspect. 2021, 10, 100364. [Google Scholar] [CrossRef]
- Sheng, K.; Dibaj, M.; Akrami, M. Analysing the Cost-Effectiveness of Charging Stations for Electric Vehicles in the UK’s Rural Areas. World Electr. Veh. J. 2021, 12, 232. [Google Scholar] [CrossRef]
- Li, Y.; Li, L.; Peng, C.; Zou, J. An MPC based optimized control approach for EV-based voltage regulation in distribution grid. Electr. Power Syst. Res. 2019, 172, 152–160. [Google Scholar] [CrossRef]
- Ahmed, I.; Ahmad, I.; Ahmed, S.; Adil, H.M.; Adil, M. Robust nonlinear control of battery electric vehicle charger in grid to vehicle applications. J. Energy Storage 2021, 42, 103039. [Google Scholar] [CrossRef]
- Mallik, A.; Lu, J.; Khaligh, A. Sliding mode control of single-phase interleaved totem-pole PFC for electric vehicle onboard chargers. IEEE Trans. Veh. Technol. 2018, 67, 8100–8109. [Google Scholar] [CrossRef]
- Aboudrar, I.; El Hani, S.; El Harouri, K.; Martins, J.; Goncalves, R.J. Reactive Power Compensation by ADRC in Vehicle to Grid Application during Grid Fault Conditions. In Proceedings of the 2020 International Conference on Electrical and Information Technologies (ICEIT), Rabat, Morocco, 4–7 March 2020; pp. 1–6. [Google Scholar]
- Song, J.; Fu, C.; Zhang, G.; Duan, B.; Zhang, C. Backstepping Control of High-Frequency Link Matrix Rectifier for Battery Chargers. IEEE Trans. Power Electron. 2021, 36, 10801–10814. [Google Scholar] [CrossRef]
- Chang, M.; Bae, S.; Cha, G.; Yoo, J. Aggregated Electric Vehicle Fast-Charging Power Demand Analysis and Forecast Based on LSTM Neural Network. Sustainability 2021, 13, 13783. [Google Scholar] [CrossRef]
- Younes, Y.A.; Drak, A.; Noura, H.; Rabhi, A.; Hajjaji, A.E. Robust model-free control applied to a quadrotor UAV. J. Intell. Robot. Syst. 2016, 84, 37–52. [Google Scholar] [CrossRef]
- Glida, H.E.; Abdou, L.; Chelihi, A.; Sentouh, C.; Hasseni, S.-E.-I. Optimal model-free backstepping control for a quadrotor helicopter. Nonlinear Dyn. 2020, 100, 3449–3468. [Google Scholar] [CrossRef]
- Gheisarnejad, M.; Faraji, B.; Esfahani, Z.; Khooban, M.-H. A Close Loop Multi-Area Brain Stimulation Control for Parkinson’s Patients Rehabilitation. IEEE Sens. J. 2019, 20, 2205–2213. [Google Scholar] [CrossRef]
- Zeitouni, M.J.; Parvaresh, A.; Abrazeh, S.; Mohseni, S.-R.; Gheisarnejad, M.; Khooban, M.-H. Digital Twins-Assisted Design of Next-Generation Advanced Controllers for Power Systems and Electronics: Wind Turbine as a Case Study. Inventions 2020, 5, 19. [Google Scholar] [CrossRef]
- Gheisarnejad, M.; Khooban, M. Supervised control strategy in trajectory tracking for a wheeled mobile robot. IET Collab. Intell. Manuf. 2019, 1, 3–9. [Google Scholar] [CrossRef]
- Feng, H.; Teng, F.; Montes, O.A.; Awal, M.A.; Bipu, M.R.H.; Husain, I.; Lukic, S. Passive Capacitor Voltage Balancing of SiC-Based Three-Level Dual-Active-Bridge Converter Using Hybrid NPC-Flying Capacitor Structure. IEEE Trans. Power Electron. 2021, 37, 4183–4194. [Google Scholar] [CrossRef]
- Naayagi, R.; Forsyth, A.J.; Shuttleworth, R. High-Power Bidirectional DC–DC Converter for Aerospace Applications. IEEE Trans. Power Electron. 2012, 27, 4366–4379. [Google Scholar] [CrossRef]
- Bai, H.; Nie, Z.; Mi, C.C. Experimental comparison of traditional phase-shift, dual-phase-shift, and model-based control of isolated bidirectional DC–DC converters. IEEE Trans. Power Electron. 2009, 25, 1444–1449. [Google Scholar] [CrossRef]
- Al Younes, Y.; Drak, A.; Noura, H.; Rabhi, A.; El Hajjaji, A. Nonlinear Integral Backstepping—Model-Free Control Applied to a Quadrotor System. Proc. Int. Conf. Intell. Unmanned Syst. 2014, 10, 1–6. [Google Scholar]
- Qiu, C.; Hu, Y.; Chen, Y.; Zeng, B. Deep deterministic policy gradient (DDPG)-based energy harvesting wireless communications. IEEE Internet Things J. 2019, 6, 8577–8588. [Google Scholar] [CrossRef]
- Gheisarnejad, M.; Farsizadeh, H.; Tavana, M.-R.; Khooban, M.H. A Novel Deep Learning Controller for DC–DC Buck–Boost Converters in Wireless Power Transfer Feeding CPLs. IEEE Trans. Ind. Electron. 2020, 68, 6379–6384. [Google Scholar] [CrossRef]
- Wei, Z.; Quan, Z.; Wu, J.; Li, Y.; Pou, J.; Zhong, H. Deep deterministic policy gradient-drl enabled multiphysics-constrained fast charging of lithium-ion battery. IEEE Trans. Ind. Electron. 2021, 69, 2588–2598. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| 400 V | 200 μF | ||
| 300–500 V | 40 μH | ||
| 20 A | 2.5 | ||
| 8000 W | 20 μF |
| Parameters | Value |
|---|---|
| 0.003 | |
| 25 | |
| Prediction horizon (N) | 6 |
| Weighting factor (λ) | 0.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mosayebi, M.; Fathollahi, A.; Gheisarnejad, M.; Farsizadeh, H.; Khooban, M.H. Smart Emergency EV-to-EV Portable Battery Charger. Inventions 2022, 7, 45. https://doi.org/10.3390/inventions7020045
Mosayebi M, Fathollahi A, Gheisarnejad M, Farsizadeh H, Khooban MH. Smart Emergency EV-to-EV Portable Battery Charger. Inventions. 2022; 7(2):45. https://doi.org/10.3390/inventions7020045
Chicago/Turabian StyleMosayebi, Mahdi, Arman Fathollahi, Meysam Gheisarnejad, Hamed Farsizadeh, and Mohammad Hassan Khooban. 2022. "Smart Emergency EV-to-EV Portable Battery Charger" Inventions 7, no. 2: 45. https://doi.org/10.3390/inventions7020045
APA StyleMosayebi, M., Fathollahi, A., Gheisarnejad, M., Farsizadeh, H., & Khooban, M. H. (2022). Smart Emergency EV-to-EV Portable Battery Charger. Inventions, 7(2), 45. https://doi.org/10.3390/inventions7020045