Sensor Localization Using Time of Arrival Measurements in a Multi-Media and Multi-Path Application of In-Situ Wireless Soil Sensing



Abstract
1. Introduction
- We present a framework to 3D localize wireless nodes located in multiple physical media (air and soil) that have multiple paths of communication through a lossy medium (soil).
- We extend the MLE framework for time of arrival of a single path signal to the multi-path case.
- We present our python-based implementation of the proposed localization schemes with simulation results validating our methodology.
- We further validate our localization schemes with rigorous sensitivity analyses of the location estimates with respect to errors in measurements of various soil parameters.
1.1. Related Works
2. Materials and Methods
2.1. MLE of ToA for a Single Path
2.2. Mean and Variance of Time of Arrival in Terms of Location Coordinates
2.2.1. Multi-Path Extension: Soil-to-Soil Communication
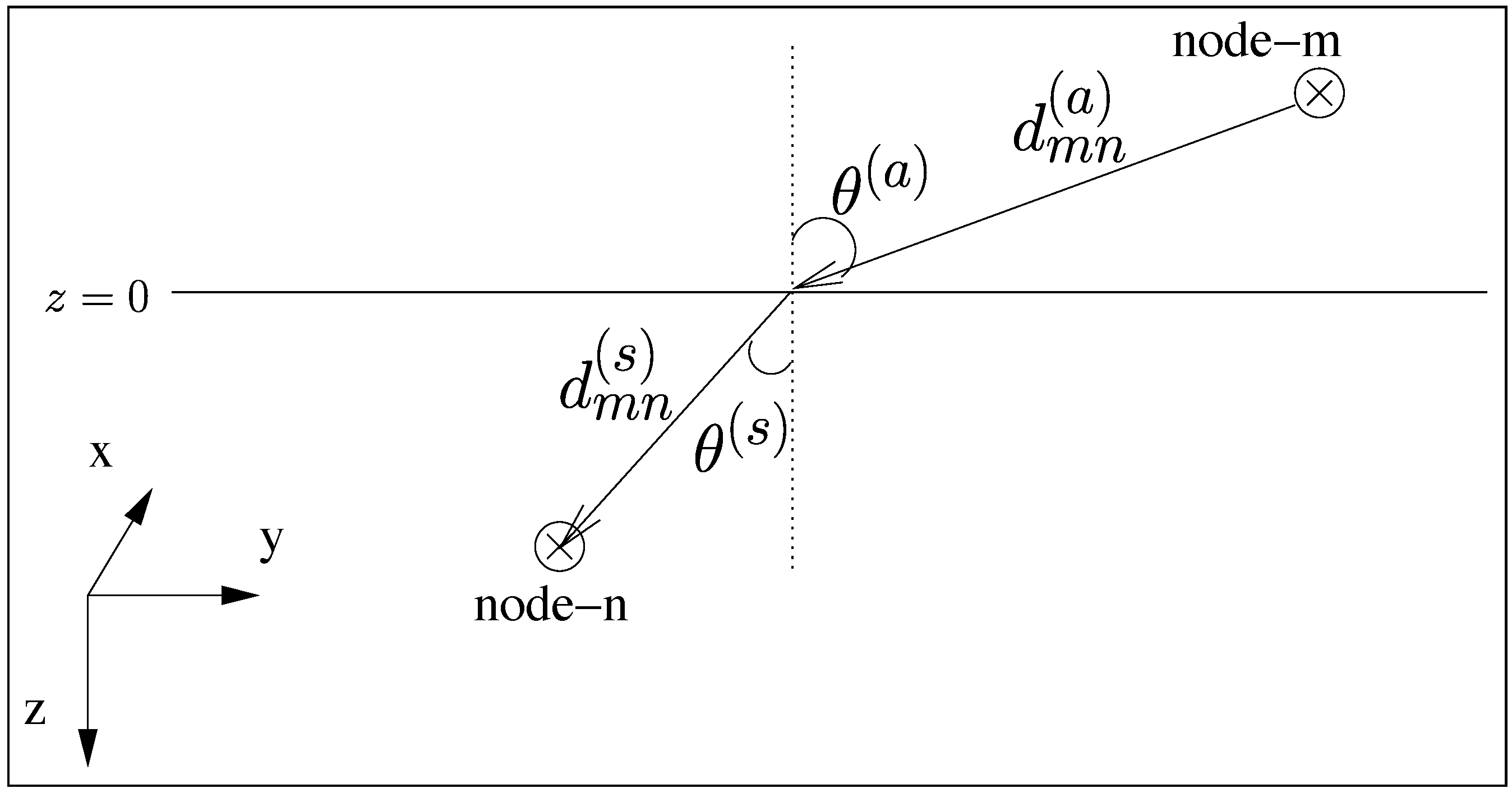
2.2.2. Multi-Media Extension: Air-to-Soil Communication
2.3. MLE-Based Localization
2.4. Software Implementation
3. Results
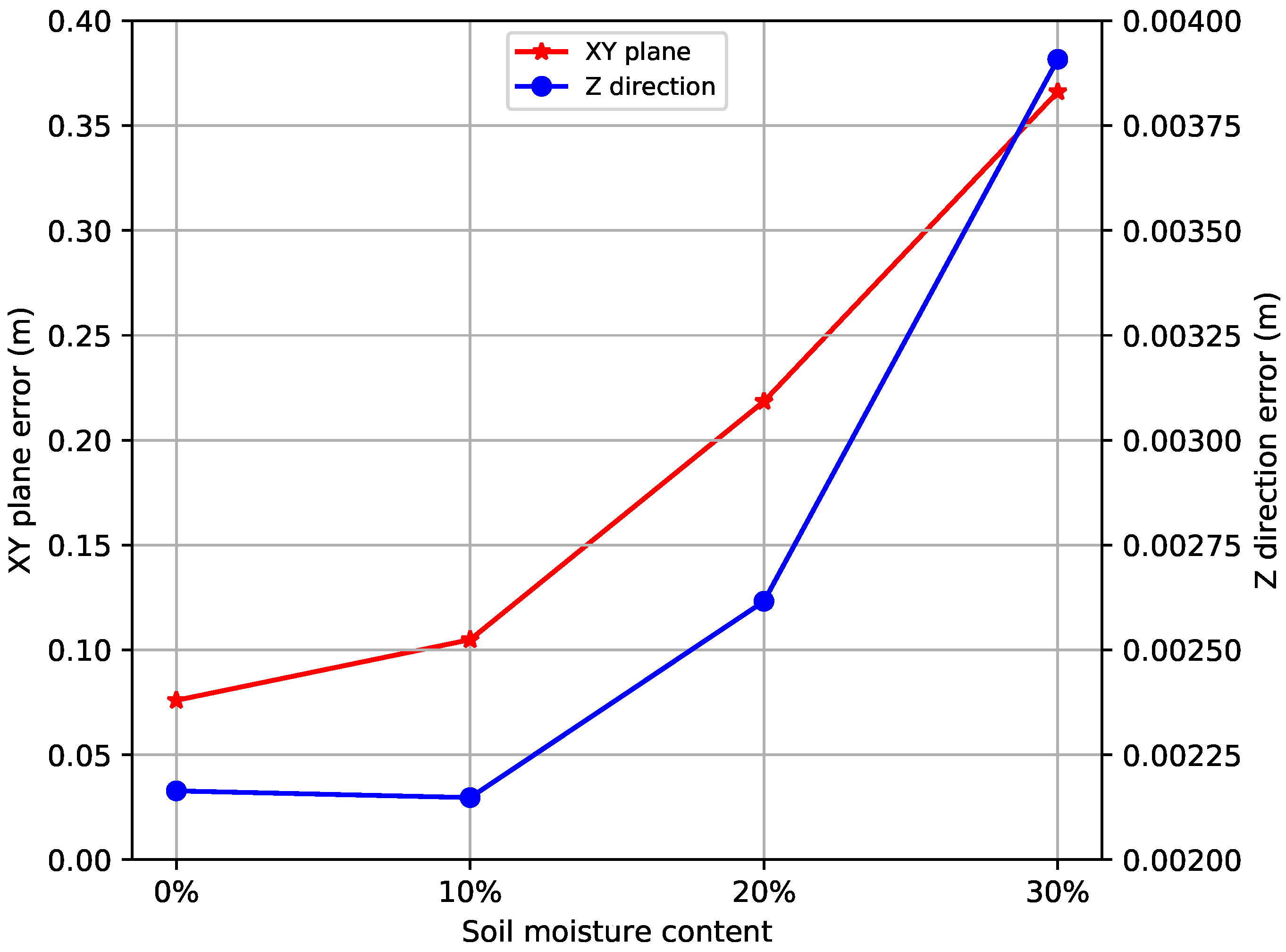
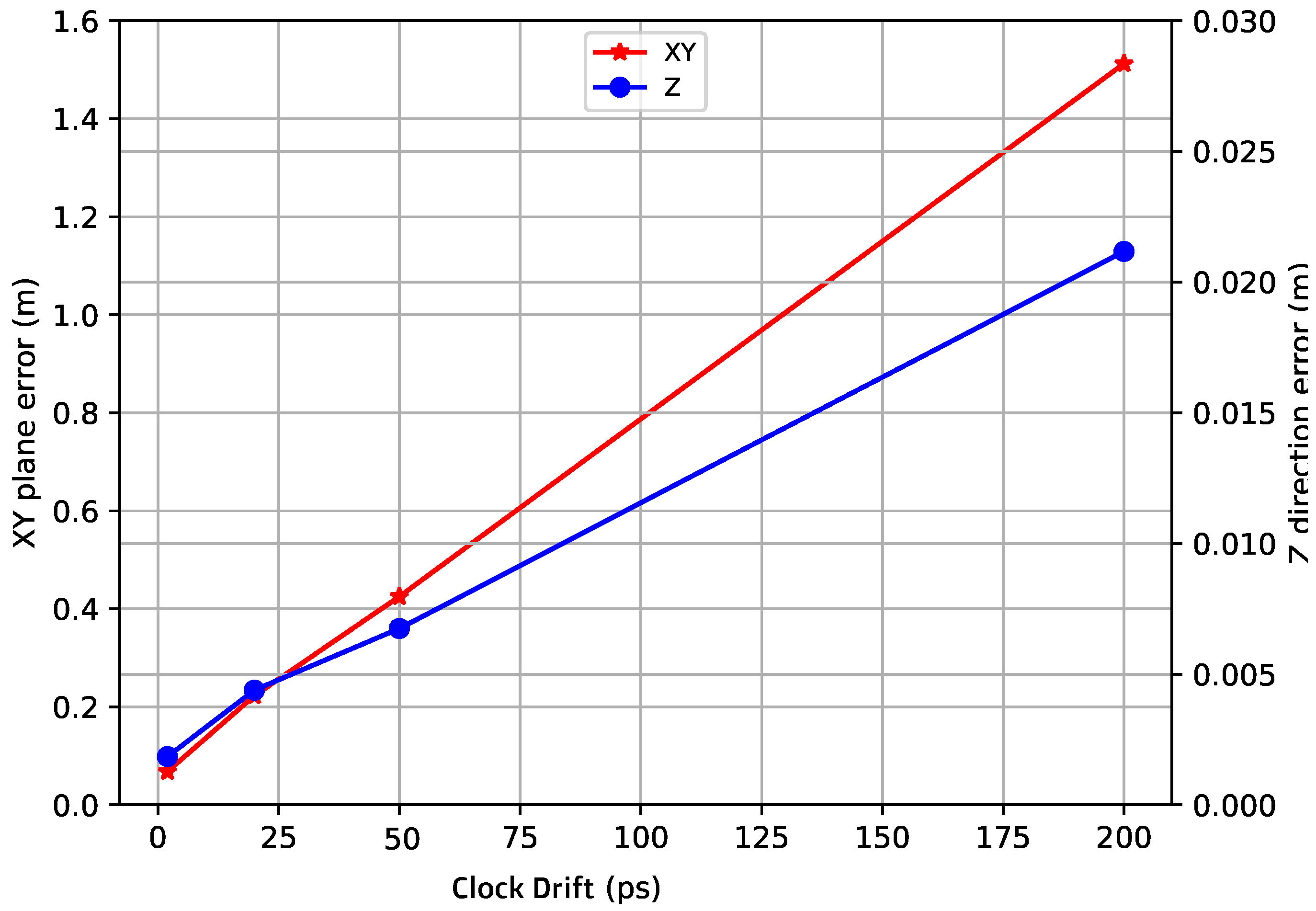
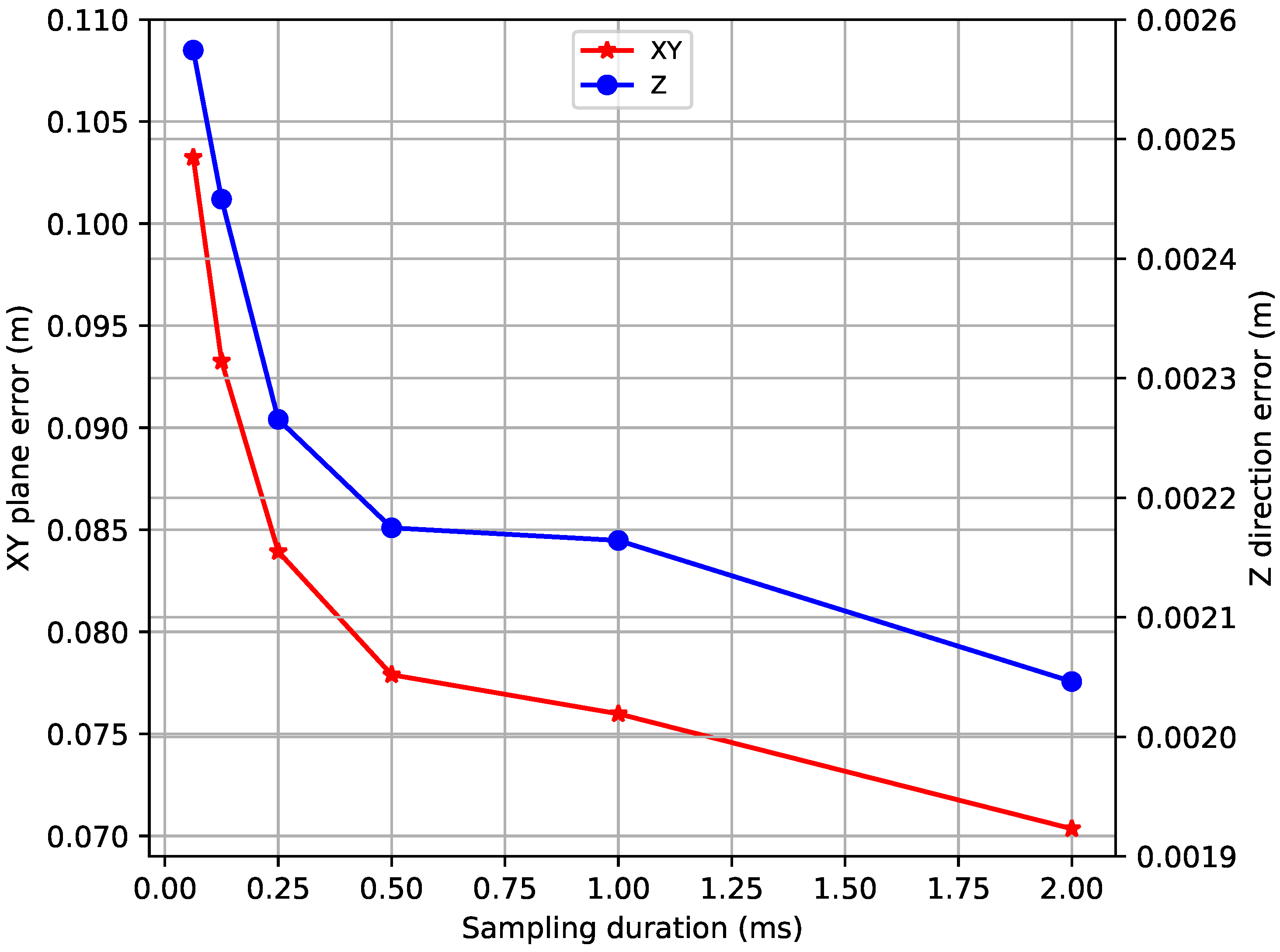
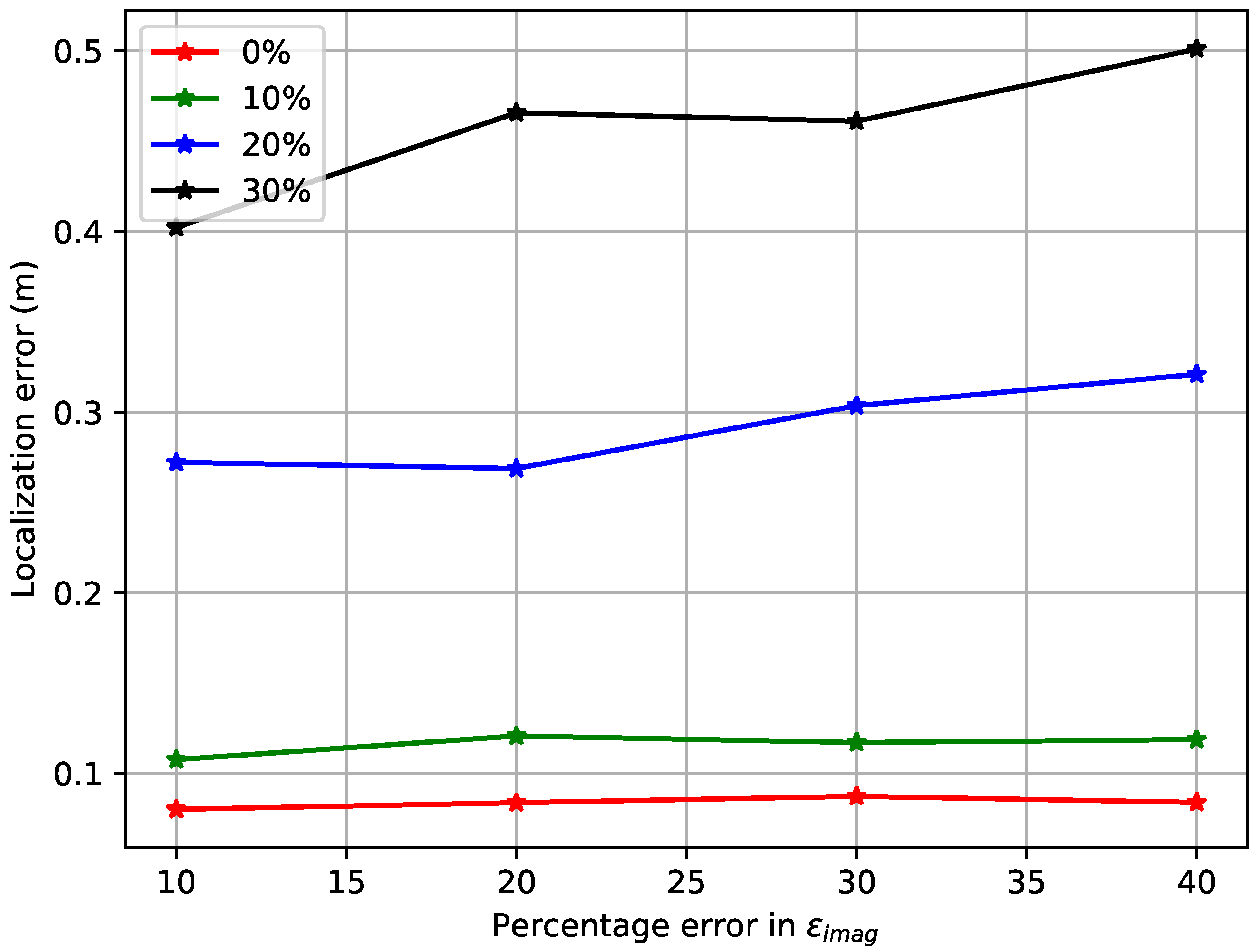
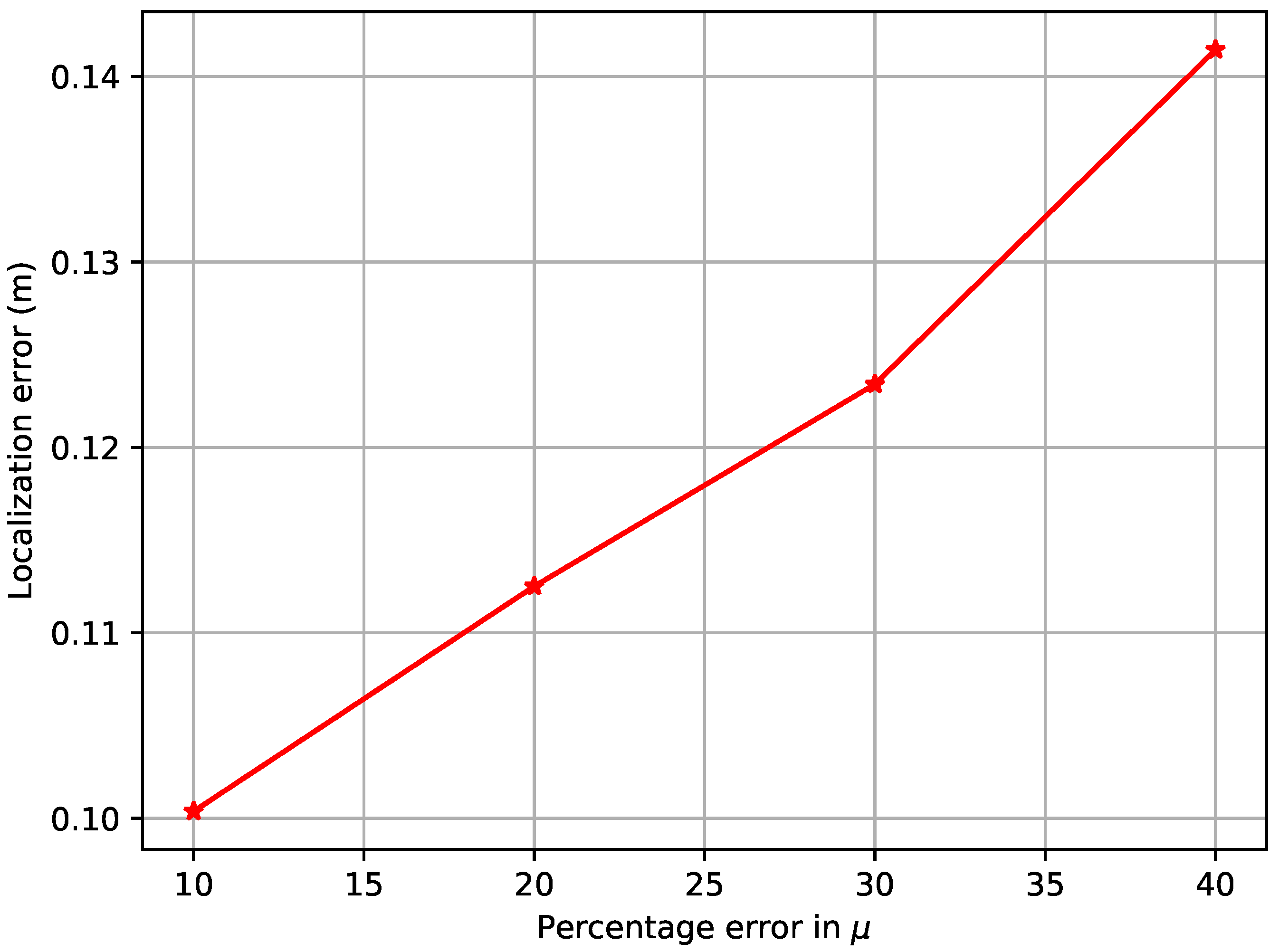
Sensitivity Analysis
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| MLE | Maximum Likelihood Estimation |
| RSS | Received Signal Strength |
| ToA | Time of Arrival |
| AoA | Angle of Arrival |
| UWB | Ultra Wide Band |
| TDoA | Time Difference of Arrival |
| WUSN | Wireless Underground Sensor Networks |
| CRLB | Cramer–Rao Lower Bound |
| SNR | Signal to Noise Ratio |
Appendix A. Mean Received Power in Terms of Locations
References
- Xu, Z.; Dong, L.; Kumar, R. Electrophoretic Soil Nutrient Sensor for Agriculture. U.S. Patent 10,564,122, 18 February 2020. [Google Scholar]
- Kumar, R.; Weber, R.J.; Pandey, G. Low RF-Band Impedance Spectroscopy Based Sensor for in-situ, Wireless Soil Sensing. U.S. Patent 10,073,074, 18 September 2018. [Google Scholar]
- Pandey, G.; Weber, R.J.; Kumar, R. Agricultural cyber-physical system: In-situ soil moisture and salinity estimation by dielectric mixing. IEEE Access 2018, 6, 43179–43191. [Google Scholar] [CrossRef]
- Xu, Z.; Wang, X.; Weber, R.J.; Kumar, R.; Dong, L. Nutrient sensing using chip scale electrophoresis and in situ soil solution extraction. IEEE Sens. J. 2017, 17, 4330–4339. [Google Scholar] [CrossRef]
- Ali, M.A.; Jiang, H.; Mahal, N.K.; Weber, R.J.; Kumar, R.; Castellano, M.J.; Dong, L. Microfluidic impedimetric sensor for soil nitrate detection using graphene oxide and conductive nanofibers enabled sensing interface. Sens. Actuators B Chem. 2017, 239, 1289–1299. [Google Scholar] [CrossRef]
- Xu, Z.; Wang, X.; Weber, R.J.; Kumar, R.; Dong, L. Microfluidic eletrophoretic ion nutrient sensor. In Proceedings of the 2016 IEEE SENSORS, Orlando, FL, USA, 30 October–3 November 2016; pp. 1–3. [Google Scholar]
- Pandey, G.; Wang, K.N.; Kumar, R.; Weber, R.J. Employing a metamaterial inspired small antenna for sensing and transceiving data in an underground soil sensor equipped with a GUI for end-user. In Proceedings of the 2014 IEEE International Conference on Systems, Man, and Cybernetics (SMC), IEEE, San Diego, CA, USA, 5–8 October 2014; pp. 3423–3428. [Google Scholar]
- Britz, B.; Ng, E.; Jiang, H.; Xu, Z.; Kumar, R.; Dong, L. Smart nitrate-selective electrochemical sensors with electrospun nanofibers modified microelectrode. In Proceedings of the 2014 IEEE International Conference on Systems, Man, and Cybernetics (SMC), IEEE, San Diego, CA, USA, 5–8 October 2014; pp. 3419–3422. [Google Scholar]
- Pandey, G.; Kumar, R.; Weber, R.J. A low profile, low-RF band, small antenna for underground, in-situ sensing and wireless energy-efficient transmission. In Proceedings of the 11th IEEE International Conference on Networking, Sensing and Control, IEEE, Miami, FL, USA, 7–9 April 2014; pp. 179–184. [Google Scholar]
- Pandey, G.; Kumar, R.; Weber, R.J. Design and implementation of a self-calibrating, compact micro strip sensor for in-situ dielectric spectroscopy and data transmission. In Proceedings of the SENSORS, 2013 IEEE, Baltimore, MD, USA, 3–6 November 2013; pp. 1–4. [Google Scholar]
- Pandey, G.; Kumar, R.; Weber, R.J. Real time detection of soil moisture and nitrates using on-board in-situ impedance spectroscopy. In Proceedings of the 2013 IEEE International Conference on Systems, Man, and Cybernetics, IEEE, Manchester, UK, 13–16 October 2013; pp. 1081–1086. [Google Scholar]
- Pandey, G.; Kumar, R.; Weber, R.J. Determination of soil ionic concentration using impedance spectroscopy. In Sensing Technologies for Global Health, Military Medicine, and Environmental Monitoring III; International Society for Optics and Photonics: Bellingham, WA, USA, 2013; Volume 8723, p. 872317. [Google Scholar]
- Pandey, G.; Kumar, R.; Weber, R.J. A multi-frequency, self-calibrating, in-situ soil sensor with energy efficient wireless interface. In Sensing for Agriculture and Food Quality and Safety V; International Society for Optics and Photonics: Bellingham, WA, USA, 2013; Volume 8721, p. 87210V. [Google Scholar]
- Kumar, R.; Tabassum, S.; Dong, L. Nano-Patterning Methods Including: (1) Patterning of Nanophotonic Structures at Optical Fiber tip for Refractive Index Sensing and (2) Plasmonic Crystal Incorporating Graphene Oxide Gas Sensor for Detection of Volatile Organic Compounds. U.S. Patent 10,725,373, 28 July 2020. [Google Scholar]
- Kashyap, B.; Kumar, R. Sensing Methodologies in Agriculture for Soil Moisture and Nutrient Monitoring. IEEE Access 2021, 9, 14095–14121. [Google Scholar] [CrossRef]
- Tabassum, S.; Dong, L.; Kumar, R. Determination of dynamic variations in the optical properties of graphene oxide in response to gas exposure based on thin-film interference. Opt. Express 2018, 26, 6331–6344. [Google Scholar] [CrossRef] [PubMed]
- Tabassum, S.; Kumar, R.; Dong, L. Nanopatterned optical fiber tip for guided mode resonance and application to gas sensing. IEEE Sens. J. 2017, 17, 7262–7272. [Google Scholar] [CrossRef]
- Tabassum, S.; Kumar, R.; Dong, L. Plasmonic crystal-based gas sensor toward an optical nose design. IEEE Sens. J. 2017, 17, 6210–6223. [Google Scholar] [CrossRef]
- Tabassum, S.; Kumar, R. Selective Detection of Ethylene Using a Fiber-Optic Guided Mode Resonance Device: In-Field Crop/Fruit Diagnostics. In CLEO: Applications and Technology; Optical Society of America: Washington, DC, USA, 2020; p. ATu4I.6. [Google Scholar]
- Kashyap, B.; Kumar, R. Bio-agent free electrochemical detection of Salicylic acid. In Proceedings of the 2019 IEEE SENSORS, Montreal, QC, Canada, 27–30 October 2019; pp. 1–4. [Google Scholar]
- Kashyap, B.; Kumar, R. Salicylic acid (SA) detection using bi-enzyme microfluidic electrochemical sensor. In Smart Biomedical and Physiological Sensor Technology XV; International Society for Optics and Photonics: Bellingham, WA, USA, 2018; Volume 10662, p. 106620K. [Google Scholar]
- Tabassum, S.; Wang, Q.; Wang, W.; Oren, S.; Ali, M.A.; Kumar, R.; Dong, L. Plasmonic crystal gas sensor incorporating graphene oxide for detection of volatile organic compounds. In Proceedings of the 2016 IEEE 29th International Conference on Micro Electro Mechanical Systems (MEMS), IEEE, Shanghai, China, 24–28 January 2016; pp. 913–916. [Google Scholar]
- Bhar, A.; Kumar, R.; Qi, Z.; Malone, R. Coordinate descent based agricultural model calibration and optimized input management. Comput. Electron. Agric. 2020, 172, 105353. [Google Scholar] [CrossRef]
- Bhar, A.; Kumar, R.; Malone, R.W. Comparing a Simple Carbon Nitrogen Model with Complex RZWQM Model. In Proceedings of the 2019 ASABE Annual International Meeting, American Society of Agricultural and Biological Engineers, Boston, MA, USA, 7–10 July 2019; p. 1. [Google Scholar]
- Bhar, A.; Kumar, R. Model-Predictive Real-Time Fertilization and Irrigation Decision-Making Using RZWQM. In Proceedings of the 2019 ASABE Annual International Meeting, Boston, MA, USA, 7–10 July 2019; p. 1. [Google Scholar]
- Dimakis, A.; Sarwate, A.; Wainwright, M. Geographic Gossip: Efficient Averaging for Sensor Networks. Signal Process. IEEE Trans. 2008, 56, 1205–1216. [Google Scholar] [CrossRef]
- Zeng, K.; Ren, K.; Lou, W.; Moran, P.J. Energy aware efficient geographic routing in lossy wireless sensor networks with environmental energy supply. Wirel. Netw. 2009, 15, 39–51. [Google Scholar] [CrossRef]
- Sahota, H.; Kumar, R.; Kamal, A.; Huang, J. An energy-efficient wireless sensor network for precision agriculture. In Proceedings of the IEEE Symposium on Computers and Communications, Riccione, Italy, 22–25 June 2010; pp. 347–350. [Google Scholar]
- Sahota, H.; Kumar, R.; Kamal, A. Performance modeling and simulation studies of MAC protocols in sensor network performance. In Proceedings of the International Conference on Wireless Communications and Mobile Computing, ACM, Istanbul, Turkey, 5–8 July 2011. [Google Scholar]
- Sahota, H.; Kumar, R.; Kamal, A. A wireless sensor network for precision agriculture and its performance. Wirel. Commun. Mob. Comput. 2011, 11, 1628–1645. [Google Scholar] [CrossRef]
- Ren, K.; Lou, W.; Zhang, Y. LEDS: Providing Location-Aware End-to-End Data Security in Wireless Sensor Networks. Mob. Comput. IEEE Trans. 2008, 7, 585–598. [Google Scholar] [CrossRef]
- Sahota, H.; Kumar, R. Network based sensor localization in multi-media application of precision agriculture Part 1: Received signal strength. In Proceedings of the 11th IEEE International Conference on Networking, Sensing and Control, Miami, FL, USA, 7–9 April 2014; pp. 191–196. [Google Scholar] [CrossRef]
- Sahota, H.; Kumar, R. Maximum-Likelihood Sensor Node Localization Using Received Signal Strength in Multimedia with Multipath Characteristics. IEEE Syst. J. 2016, 12, 1–10. [Google Scholar] [CrossRef]
- Sahota, H.; Kumar, R. Network based sensor localization in multi-media application of precision agriculture Part 2: Time of arrival. In Proceedings of the 11th IEEE International Conference on Networking, Sensing and Control, Miami, FL, USA, 7–9 April 2014; pp. 203–208. [Google Scholar] [CrossRef]
- Patwari, N.; Ash, J.; Kyperountas, S.; Hero, A.O.; Moses, R.; Correal, N. Locating the nodes: Cooperative localization in wireless sensor networks. Signal Process. Mag. IEEE 2005, 22, 54–69. [Google Scholar] [CrossRef]
- Aspnes, J.; Eren, T.; Goldenberg, D.; Morse, A.; Whiteley, W.; Yang, Y.; Anderson, B.; Belhumeur, P. A Theory of Network Localization. Mob. Comput. IEEE Trans. 2006, 5, 1663–1678. [Google Scholar] [CrossRef]
- Youssef, A.; Agrawala, A.; Younis, M. Accurate anchor-free node localization in wireless sensor networks. In Proceedings of the 24th IEEE International Performance, Computing, and Communications Conference, Phoenix, AZ, USA, 7–9 April 2005; pp. 465–470. [Google Scholar] [CrossRef]
- Xiao, B.; Chen, L.; Xiao, Q.; Li, M. Reliable Anchor-Based Sensor Localization in Irregular Areas. Mob. Comput. IEEE Trans. 2010, 9, 60–72. [Google Scholar] [CrossRef]
- Stoleru, R.; He, T.; Mathiharan, S.; George, S.; Stankovic, J. Asymmetric Event-Driven Node Localization in Wireless Sensor Networks. Parallel Distrib. Syst. IEEE Trans. 2012, 23, 634–642. [Google Scholar] [CrossRef]
- Wymeersch, H.; Lien, J.; Win, M. Cooperative Localization in Wireless Networks. Proc. IEEE 2009, 97, 427–450. [Google Scholar] [CrossRef]
- Dil, B.; Dulman, S.; Havinga, P. Range-based localization in mobile sensor networks. In Wireless Sensor Networks; Springer: Berlin/Heidelberg, Germany, 2006; pp. 164–179. [Google Scholar]
- Abrudan, T.E.; Kypris, O.; Trigoni, N.; Markham, A. Impact of Rocks and Minerals on Underground Magneto-Inductive Communication and Localization. IEEE Access 2016, 4, 3999–4010. [Google Scholar] [CrossRef]
- Abrudan, T.E.; Xiao, Z.; Markham, A.; Trigoni, N. Underground Incrementally Deployed Magneto-Inductive 3-D Positioning Network. IEEE Trans. Geosci. Remote Sen. 2016, 54, 4376–4391. [Google Scholar] [CrossRef]
- Kumar, S.; Hegde, R.M. An Efficient Compartmental Model for Real-Time Node Tracking Over Cognitive Wireless Sensor Networks. IEEE Trans. Signal Process. 2015, 63, 1712–1725. [Google Scholar] [CrossRef]
- Singh, P.; Agrawal, S. TDOA Based Node Localization in WSN Using Neural Networks. In Proceedings of the 2013 International Conference on Communication Systems and Network Technologies, Gwalior, India, 6–8 April 2013; pp. 400–404. [Google Scholar] [CrossRef]
- Wu, D.; Chatzigeorgiou, D.; Youcef-Toumi, K.; Ben-Mansour, R. Node Localization in Robotic Sensor Networks for Pipeline Inspection. IEEE Trans. Ind. Inform. 2016, 12, 809–819. [Google Scholar] [CrossRef]
- Mao, Y.; Cheng, D. A localization algorithm by dynamic path-loss fading index for intelligent mining system. In Proceedings of the 2014 9th International Conference on Computer Science & Education, Vancouver, BC, Canada, 22–24 August 2014; pp. 977–980. [Google Scholar]
- Assaf, A.E.; Zaidi, S.; Affes, S.; Kandil, N. Accurate Sensors Localization in Underground Mines or Tunnels. In Proceedings of the 2015 IEEE International Conference on Ubiquitous Wireless Broadband (ICUWB), Montreal, QC, Canada, 4–7 October 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Silva, B.; Fisher, R.M.; Kumar, A.; Hancke, G.P. Experimental Link Quality Characterization of Wireless Sensor Networks for Underground Monitoring. IEEE Trans. Ind. Inform. 2015, 11, 1099–1110. [Google Scholar] [CrossRef]
- Savvides, A.; Garber, W.; Moses, R.; Srivastava, M. An analysis of error inducing parameters in multihop sensor node localization. Mob. Comput. IEEE Trans. 2005, 4, 567–577. [Google Scholar] [CrossRef]
- Kaur, R.; Arora, S. Nature Inspired Range Based Wireless Sensor Node Localization Algorithms. Int. J. Inter. Multimed. Artif. Intell. 2017, 4, 7–17. [Google Scholar] [CrossRef]
- Tuba, E.; Tuba, M.; Beko, M. Two stage wireless sensor node localization using firefly algorithm. In Smart Trends in Systems, Security and Sustainability; Springer: Berlin/Heidelberg, Germany, 2018; pp. 113–120. [Google Scholar]
- Strumberger, I.; Beko, M.; Tuba, M.; Minovic, M.; Bacanin, N. Elephant herding optimization algorithm for wireless sensor network localization problem. In Doctoral Conference on Computing, Electrical and Industrial Systems; Springer: Berlin/Heidelberg, Germany, 2018; pp. 175–184. [Google Scholar]
- Arora, S.; Singh, S. Node localization in wireless sensor networks using butterfly optimization algorithm. Arab. J. Sci. Eng. 2017, 42, 3325–3335. [Google Scholar] [CrossRef]
- Strumberger, I.; Tuba, E.; Bacanin, N.; Beko, M.; Tuba, M. Wireless sensor network localization problem by hybridized moth search algorithm. In Proceedings of the 2018 14th International Wireless Communications & Mobile Computing Conference (IWCMC), IEEE, Limassol, Cyprus, 25–29 June 2018; pp. 316–321. [Google Scholar]
- Huang, H.; Zheng, Y.R. Node localization with AoA assistance in multi-hop underwater sensor networks. Ad Hoc Netw. 2018, 78, 32–41. [Google Scholar] [CrossRef]
- Fang, W.; Wang, H.; Hu, Z. Filter Anchor Node Localization Algorithm Based on Rssi for Underground Mine Wireless Sensor Networks. In Proceedings of the 2017 IEEE International Conference on Computational Science and Engineering (CSE) and IEEE International Conference on Embedded and Ubiquitous Computing (EUC), IEEE, Guangzhou, China, 21–24 July 2017; Volume 1, pp. 673–676. [Google Scholar]
- Wang, S.; Lin, Y.; Tao, H.; Sharma, P.K.; Wang, J. Underwater acoustic sensor networks node localization based on compressive sensing in water hydrology. Sensors 2019, 19, 4552. [Google Scholar] [CrossRef] [PubMed]
- Helstrom, C.W. Statistical Theory of Signal Detection, 2nd ed.; Pergamon Press: Oxford, UK, 1968. [Google Scholar]
- Tiusanen, J. Attenuation of a Soil Scout Radio Signal. Biosyst. Eng. 2005, 90, 127–133. [Google Scholar] [CrossRef]
- Mironov, V.L. Spectral dielectric properties of moist soils in the microwave band. In Proceedings of the Geoscience and Remote Sensing IEEE International Symposium, Anchorage, AK, USA, 20–24 September 2004. [Google Scholar] [CrossRef]
- Scott, J.; Force U.S.A. Electrical and Magnetic Properties of Rock and Soil; Open-File Report; U.S. Geological Survey: Reston, VA, USA, 1983. [Google Scholar]
- Instruments, T. Low-Power SoC (System-on-Chip) with MCU, Memory, Sub-1 GHz RF Transceiver, and USB Controller. Available online: https://www.ti.com/lit/ds/symlink/cc1110-cc1111.pdf (accessed on 26 February 2021).
- William, H.; Hayt, J.; Buck, J.A. Engineering Electromagnetics, 6th ed.; Mc-Graw Hill: New York, NY, USA, 2001. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fractional Volume of Water | ||
|---|---|---|
| 2.36 | 0.0966 | |
| 5.086 | 0.441 | |
| 16.410 | 2.368 | |
| 24.485 | 3.857 |
| Parameter | Symbol | Value |
|---|---|---|
| Transmit power (Satellite node) | 38 dBm | |
| Transmit power (Sensor node) | 10 dBm | |
| Thermal noise | −110 dBm | |
| Path loss factor (air) | 2 | |
| Path loss factor (soil) | 2 | |
| Relative permeability (soil) | 1.0084 | |
| Frequency | f | 433 MHz |
| Wavelength | 0.7 m | |
| Bandwidth | B | 1 Hz |
| Signal duration | 1 ms |
| TOA | RSS | |||
|---|---|---|---|---|
| Moisture Content | xy | z | xy | z |
| 0% | ||||
| 10% | ||||
| 20% | ||||
| 30% | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sahota, H.; Kumar, R. Sensor Localization Using Time of Arrival Measurements in a Multi-Media and Multi-Path Application of In-Situ Wireless Soil Sensing. Inventions 2021, 6, 16. https://doi.org/10.3390/inventions6010016
Sahota H, Kumar R. Sensor Localization Using Time of Arrival Measurements in a Multi-Media and Multi-Path Application of In-Situ Wireless Soil Sensing. Inventions. 2021; 6(1):16. https://doi.org/10.3390/inventions6010016
Chicago/Turabian StyleSahota, Herman, and Ratnesh Kumar. 2021. "Sensor Localization Using Time of Arrival Measurements in a Multi-Media and Multi-Path Application of In-Situ Wireless Soil Sensing" Inventions 6, no. 1: 16. https://doi.org/10.3390/inventions6010016
APA StyleSahota, H., & Kumar, R. (2021). Sensor Localization Using Time of Arrival Measurements in a Multi-Media and Multi-Path Application of In-Situ Wireless Soil Sensing. Inventions, 6(1), 16. https://doi.org/10.3390/inventions6010016