Adaptive Stochastic Filtration Based on the Estimation of the Covariance Matrix of Measurement Noises Using Irregular Accurate Observations



{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Task Definition
- inertial-satellite Navigation Systems (NS), where the measurement correction of inertial NS is based on satellite NS measurements; in this case, the measurement errors of the inertial NS increase with time, and the satellite NS measurements are considered as accurate measurements of the velocity vector and coordinates of the object [38,39];
- different robots’ NS, in which the correction of the navigation parameters of the robot (or person) is subject to a zero speed of his feet (or bottom of wheel) at the moment of touching the surface of the earth [40];
- is the transition matrix of the system state;
- is the measurement vector, ;
- is the measurement matrix that maps the space of system state vectors to the space of measurement vectors;
- is the measurement interference approximated further by a centered Gaussian sequence with an unknown covariance matrix , estimated from accurate observations;
- is the filter gain defined aswhere is the extrapolated covariance matrix that characterizes the error value of the a posteriori state vector estimation;
- is the covariance matrix of system noise that characterizes the level of its impact on the system.
3. Results
3.1. Adaptive Filtration Algorithm for Uncorrelated Noises in the Measurement Vector
3.2. Adaptive Filtration Algorithm for Correlated Noises in the Measurement Vector
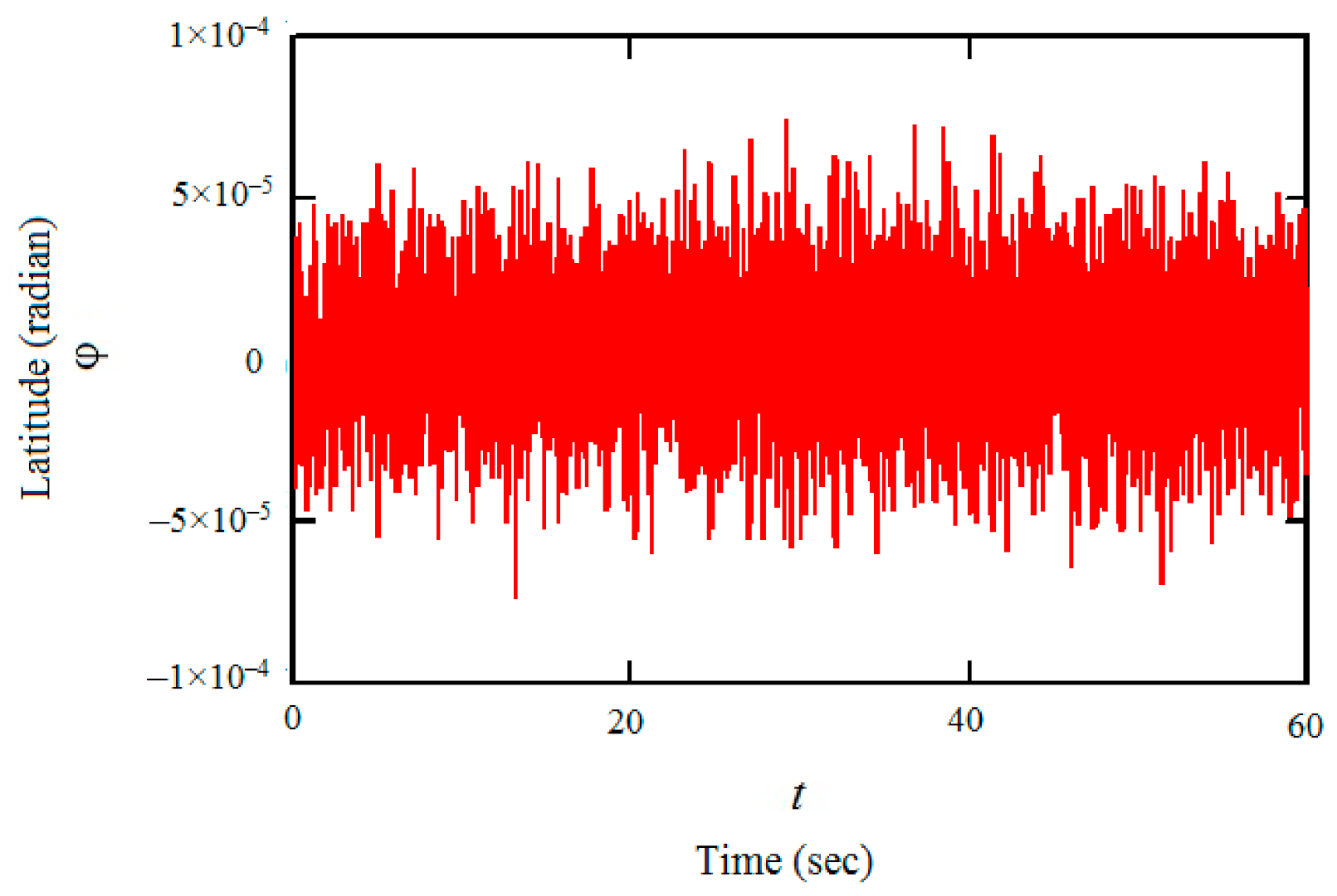
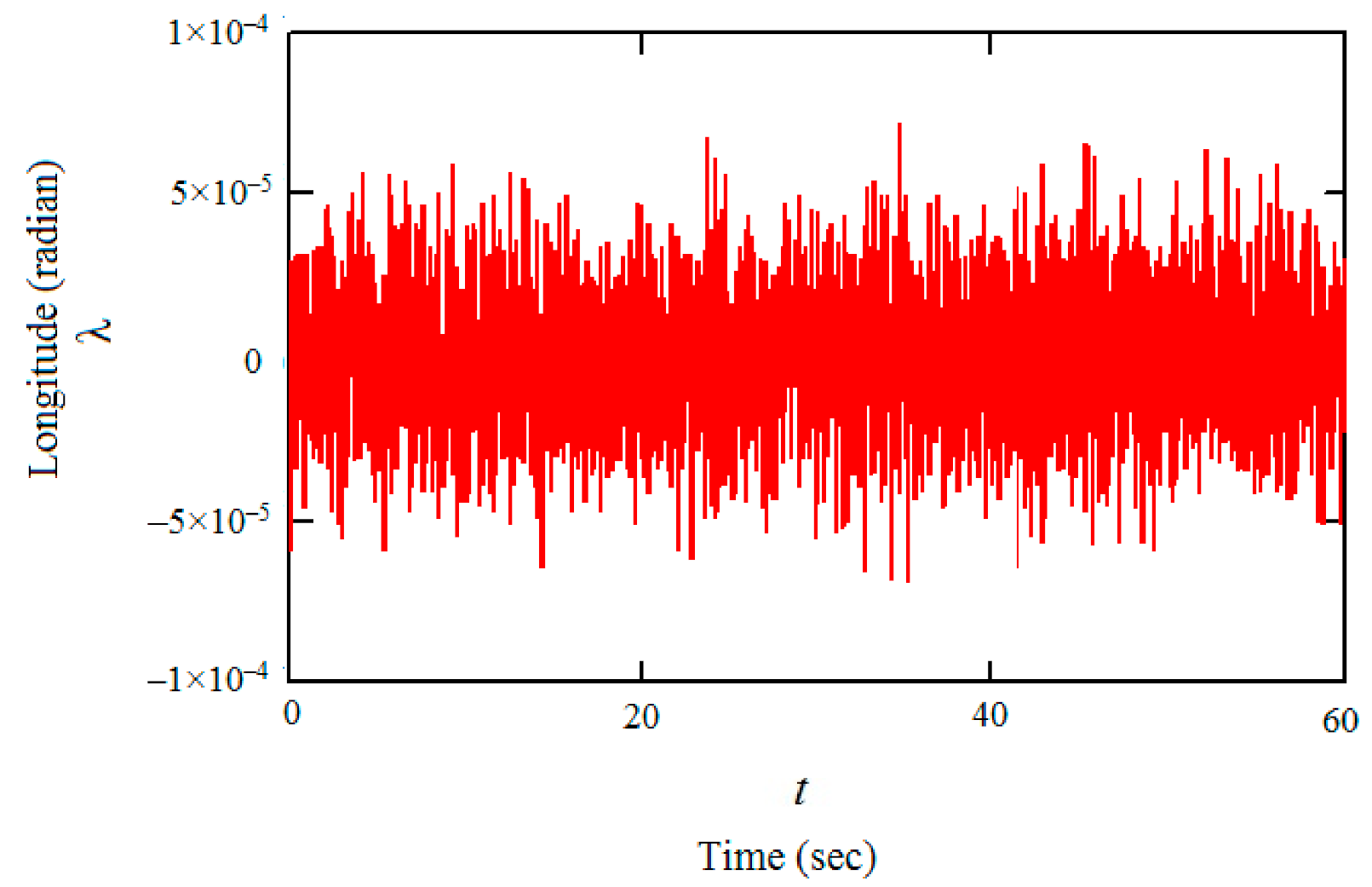
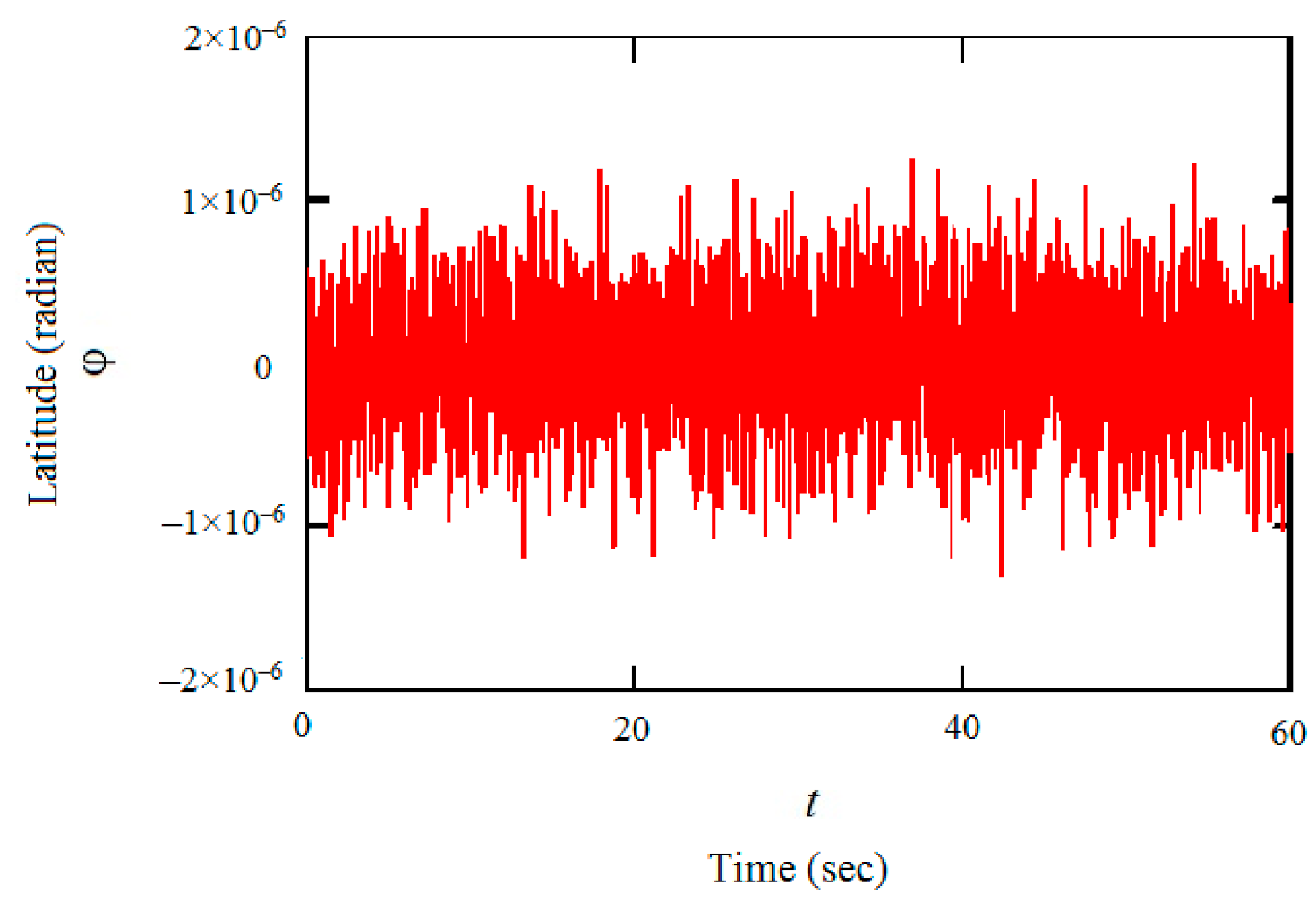
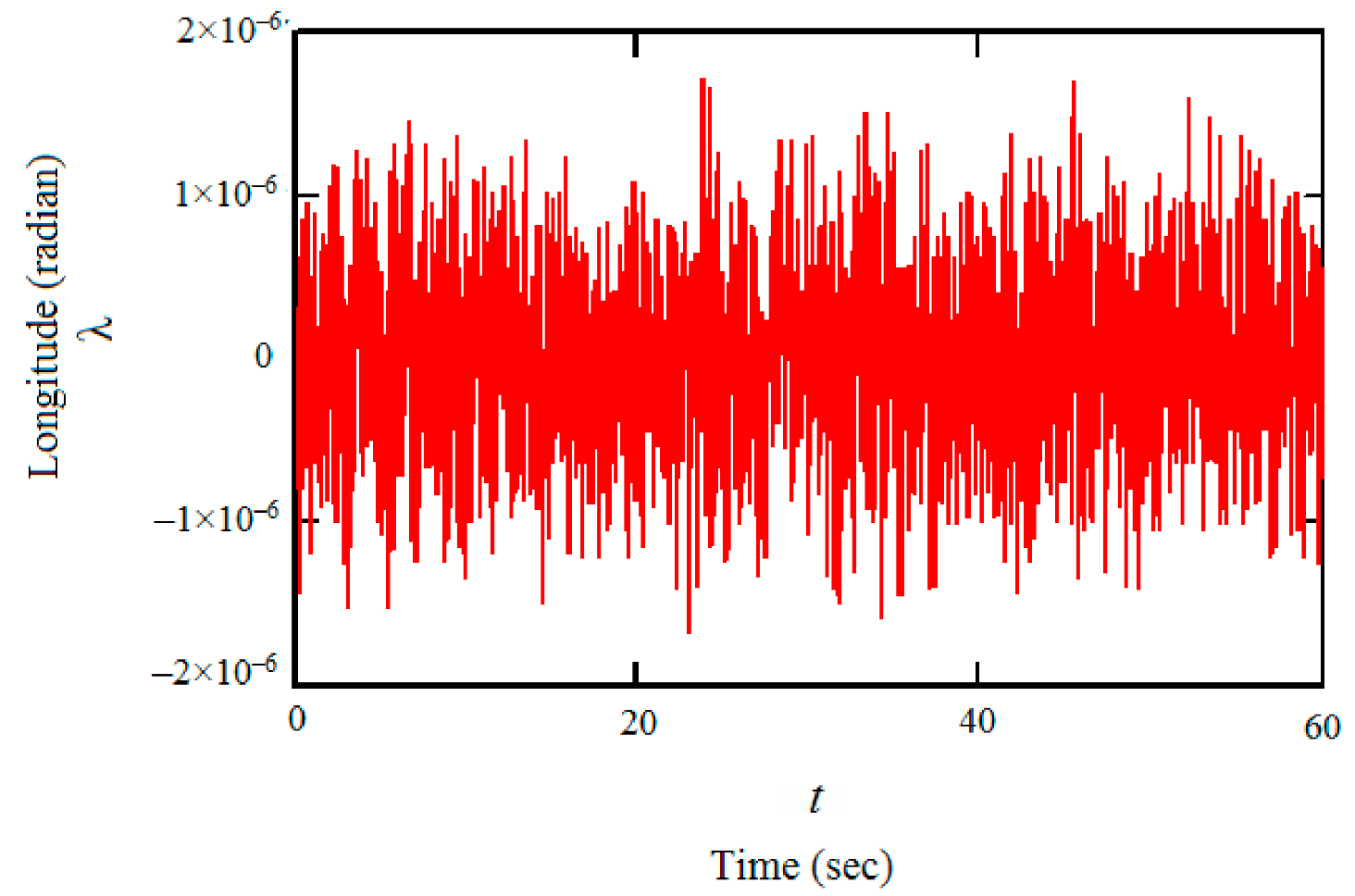
3.3. Example
- N is the number of samples in the sliding “window” of the measurement in which the covariance matrix is estimated;
- j0 = k − N + 1 is the initial position of the sliding “window“.
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kurtz, V.; Lin, H. Kalman Filtering with Gaussian Processes Measurement Noise. 2019. preprint. [Google Scholar]
- Yeo, K.; Melnyk, I. Deep learning algorithm for data-driven simulation of noisy dynamical system. J. Comput. Phys. 2019, 376, 1212–1231. [Google Scholar] [CrossRef]
- Ohsumi, A.; Nakano, N. Identification of physical parameters of a flexible structure from noisy measurement data. IEEE Trans. Instrum. Meas. 2002, 51, 923–929. [Google Scholar] [CrossRef]
- Khan, N.; Jabbar, A.; Bilal, H.; Gul, U. Compensated closed-loop Kalman filtering for nonlinear systems. Measurement 2020, 151, 107129. [Google Scholar] [CrossRef]
- Rodriguez-Maldonado, J. Estimation of angular velocity and acceleration with Kalman filter, based on position measurement only. Measurement 2019, 145, 130–136. [Google Scholar] [CrossRef]
- Xu, C.; Huang, D.; Liu, J. Target location of unmanned aerial vehicles based on the electro-optical stabilization and tracking platform. Measurement 2019, 147, 106848. [Google Scholar] [CrossRef]
- Wang, D.; Dong, Y.; Li, Q.; Wu, J.; Wen, Y. Estimation of small UAV position and attitude with reliable in-flight initial alignment for MEMS inertial sensors. Metrol. Meas. Syst. 2018, 25, 603–616. [Google Scholar]
- Qu, Y.; Yan, J.; Pan, Q.; Fan, C. Study on the filtering method of the navigation data of a UAV. In Proceedings of the ISTM/2005: 6th International Symposium on Test and Measurement; Wen, T., Ed.; International Academic Publishers: Dalian, China, 2005; pp. 7684–7687. [Google Scholar]
- Wang, D.; Lv, H.; Wu, J. Augmented Cubature Kalman filter for nonlinear RTK/MIMU integrated navigation with non-additive noise. Measurement 2017, 97, 111–125. [Google Scholar] [CrossRef]
- Salehi, Y.; Fatehi, A.; Nayebi, M.A. State Estimation of Slow-Rate Integrated Measurement Systems in the Presence of Parametric Uncertainties. IEEE Trans. Instrum. Meas. 2019, 68, 3983–3991. [Google Scholar] [CrossRef]
- Kaniewski, P.; Gil, R.; Konatowski, S. Estimation of UAV Position with Use of Smoothing Algorithms. Metrol. Meas. Syst. 2017, 24, 127–142. [Google Scholar] [CrossRef]
- Xu, X.; Xu, X.; Zhang, T.; Wang, Z. In-Motion Filter-QUEST Alignment for Strapdown Inertial Navigation Systems. IEEE Trans. Instrum. Meas. 2018, 67, 1979–1993. [Google Scholar] [CrossRef]
- Meng, Z.; Pan, Z.; Chen, Z.; Shi, Y. Adaptive signal fusion based on relative fluctuations of variable signals. Measurement 2019, 148, 106909. [Google Scholar] [CrossRef]
- Sinitsyn, I.N. Kalman and Pugachev filters [in Russian]; Logos: Moscow, Russia, 2007; ISBN 978-5-98704-270-4. [Google Scholar]
- Reif, K.; Unbehauen, R. The extended Kalman filter as an exponential observer for nonlinear systems. IEEE Trans. Signal Process. 1999, 47, 2324–2328. [Google Scholar] [CrossRef]
- Anderson, B.D.O. Exponential data weighting in the Kalman-Bucy filter. Inf. Sci. 1973, 5, 217–230. [Google Scholar] [CrossRef]
- Xiong, J. An Introduction to Stochastic Filtering Theory; Oxford University Press: New York, NY, USA, 2008; ISBN 978-0-19-921970-4. [Google Scholar]
- Senne, K. Stochastic processes and filtering theory. IEEE Trans. Automat. Contr. 1972, 17, 752–753. [Google Scholar] [CrossRef]
- Ferrero, A.; Ferrero, R.; Jiang, W.; Salicone, S. The Kalman Filter Uncertainty Concept in the Possibility Domain. IEEE Trans. Instrum. Meas. 2019, 68, 4335–4347. [Google Scholar] [CrossRef]
- Kalman, R.E. Mathematical Description of Linear Dynamical Systems. J. Soc. Ind. Appl. Math. Ser. A Control 1963, 1, 152–192. [Google Scholar] [CrossRef]
- Sokolov, S.V. Application of non-Gaussian distribution at the synthesis of suboptimal filtration algorithms. Izv. Vyss. Uchebnykh Zaved. Radioelektronika 1991, 34, 8–11. [Google Scholar]
- Sokolov, S.V.; Novikov, A.I. Adaptive estimation of UVs navigation parameters by irregular inertial-satellite measurements. Int. J. Intell. Unmanned Syst. 2020. In Press. [Google Scholar] [CrossRef]
- Sokolov, S.V.; Novikov, A.I.; Ivetić, V. Determining the initial orientation for navigation-measurement systems of mobile apparatus in reforestation. Inventions 2019, 4, 56. [Google Scholar] [CrossRef]
- De Mendonça, C.B.; Hemerly, E.M.; Góes, L.C.S. Adaptive Stochastic Filtering for Online Aircraft Flight Path Reconstruction. J. Aircr. 2007, 44, 1546–1558. [Google Scholar] [CrossRef]
- Lei, X.; Li, J. An adaptive navigation method for a small unmanned aerial rotorcraft under complex environment. Measurement 2013, 46, 4166–4171. [Google Scholar] [CrossRef]
- Kucherenko, P.A.; Sokolov, S.V. A solution of the problem of nonlinear parametric identification based on generalized probability criteria. J. Comput. Syst. Sci. Int. 2008, 47, 703–708. [Google Scholar] [CrossRef]
- Sokolov, S.; Marshakov, D.; Novikov, A. The current spectrum formation of a non-periodic signal: A differential approach. Inventions 2020, 5, 15. [Google Scholar] [CrossRef]
- Sasiadek, J.Z.; Wang, Q. Low cost automation using INS/GPS data fusion for accurate positioning. Robotica 2003, 21, 255–260. [Google Scholar] [CrossRef]
- Herrera, E.P.; Kaufmann, H. Adaptive methods of Kalman filtering for personal positioning systems. In Proceedings of the 23rd International Technical Meeting of the Satellite Division of the Institute of Navigation 2010 (ION GNSS 2010), Portland, Oregon, 21–24 September 2010. [Google Scholar]
- Hide, C.; Moore, T.; Smith, M. Adaptive Kalman filtering algorithms for integrating GPS and low cost INS. In Proceedings of the PLANS 2004. Position Location and Navigation Symposium (IEEE Cat. No.04CH37556), Monterey, CA, USA, 26–29 April 2004; pp. 227–233. [Google Scholar]
- Hu, C.; Chen, W.; Chen, Y.; Liu, D. Adaptive Kalman Filtering for Vehicle Navigation. J. Glob. Position. Syst. 2003, 2, 42–47. [Google Scholar] [CrossRef]
- Mehra, R. On the identification of variances and adaptive Kalman filtering. IEEE Trans. Automat. Contr. 1970, 15, 175–184. [Google Scholar] [CrossRef]
- Mohamed, A.H.; Schwarz, K.P. Adaptive Kalman filtering for INS/GPS. J. Geod. 1999, 73, 193–203. [Google Scholar] [CrossRef]
- Qiu, Z.; Huang, Y.; Qian, H. Adaptive Robust Nonlinear Filtering for Spacecraft Attitude Estimation Based on Additive Quaternion. IEEE Trans. Instrum. Meas. 2020, 69, 100–108. [Google Scholar] [CrossRef]
- Kim, D.; Min, K.; Kim, H.; Huh, K. Vehicle sideslip angle estimation using deep ensemble-based adaptive Kalman filter. Mech. Syst. Signal Process. 2020, 144, 106862. [Google Scholar] [CrossRef]
- Ma, T.; Chen, C.; Gao, S. Model set adaptive filtering algorithm using variational Bayesian approximations and Rényi information divergence. EURASIP J. Adv. Signal Process. 2020, 2020, 17. [Google Scholar] [CrossRef]
- Miao, Z.; Shi, H.; Zhang, Y.; Xu, F. Neural network-aided variational Bayesian adaptive cubature Kalman filtering for nonlinear state estimation. Meas. Sci. Technol. 2017, 28, 105003. [Google Scholar] [CrossRef]
- Litvin, M.A.; Malyugina, A.A.; Miller, A.B.; Stepanov, A.N.; Chickrin, D.E. Error Classification and Approximation in Inertial Navigational Systems. Inf. Process. 2014, 14, 326–339. [Google Scholar]
- Reznichenko, V.I.; Maleev, P.I.; Smirnov, M.Y. The satellite correction of orientation parameters for marine objects. Navig. Hydrogr. 2008, 27, 25–32. [Google Scholar]
- Tsyplakov, A.A. An introduction to state space modelling. Quantile 2011, 5, 1–24. [Google Scholar]
- Novikov, A.I.; Ersson, B.T. Aerial seeding of forests in Russia: A selected literature analysis. IOP Conf. Ser. Earth Environ. Sci. 2019, 226, 012051. [Google Scholar] [CrossRef]
- Chen, C.; Chang, G. Low-cost GNSS/INS integration for enhanced land vehicle performance. Meas. Sci. Technol. 2020, 31, 035009. [Google Scholar] [CrossRef]
- Shilina, V.A. Inertial Sensor System for Indoor Navigation. Available online: http://ainsnt.ru/doc/778220.html (accessed on 5 January 2020).
- Sokolov, S.V.; Polyakova, M.V.; Kucherenko, P.A. Analytic Synthesis of a Kalman Adaptive Filter on the Basis of Irregular Precise Measurements. Meas. Tech. 2018, 61, 232–237. [Google Scholar] [CrossRef]
- Rozenberg, I.N.; Sokolov, S.V.; Umansky, V.I.; Pogorelov, V.A. The Theoretical Basis of the Tight Integration of Inertial-Satellite Navigation Systems; Fizmatlit: Moscow, Russia, 2018. [Google Scholar]
- Gantmakher, F.R. The Theory of Matrices; Fizmatlit: Moscow, Russia, 1959; ISBN 0821813765. [Google Scholar]
- Jwo, D.-J.; Chung, F.-C.; Weng, T.-P. Adaptive Kalman Filter for Navigation Sensor Fusion. In Sensor Fusion and its Applications; Sciyo: Shanghai, China, 2010; pp. 65–90. [Google Scholar]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sokolov, S.; Novikov, A.; Polyakova, M. Adaptive Stochastic Filtration Based on the Estimation of the Covariance Matrix of Measurement Noises Using Irregular Accurate Observations. Inventions 2021, 6, 10. https://doi.org/10.3390/inventions6010010
Sokolov S, Novikov A, Polyakova M. Adaptive Stochastic Filtration Based on the Estimation of the Covariance Matrix of Measurement Noises Using Irregular Accurate Observations. Inventions. 2021; 6(1):10. https://doi.org/10.3390/inventions6010010
Chicago/Turabian StyleSokolov, Sergey, Arthur Novikov, and Marianna Polyakova. 2021. "Adaptive Stochastic Filtration Based on the Estimation of the Covariance Matrix of Measurement Noises Using Irregular Accurate Observations" Inventions 6, no. 1: 10. https://doi.org/10.3390/inventions6010010
APA StyleSokolov, S., Novikov, A., & Polyakova, M. (2021). Adaptive Stochastic Filtration Based on the Estimation of the Covariance Matrix of Measurement Noises Using Irregular Accurate Observations. Inventions, 6(1), 10. https://doi.org/10.3390/inventions6010010