Experimental Investigation of Impact Localization in Composite Plate Using Newly Developed Imaging Method




Abstract
:
1. Introduction
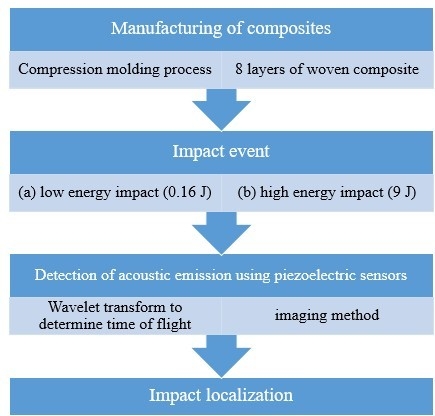
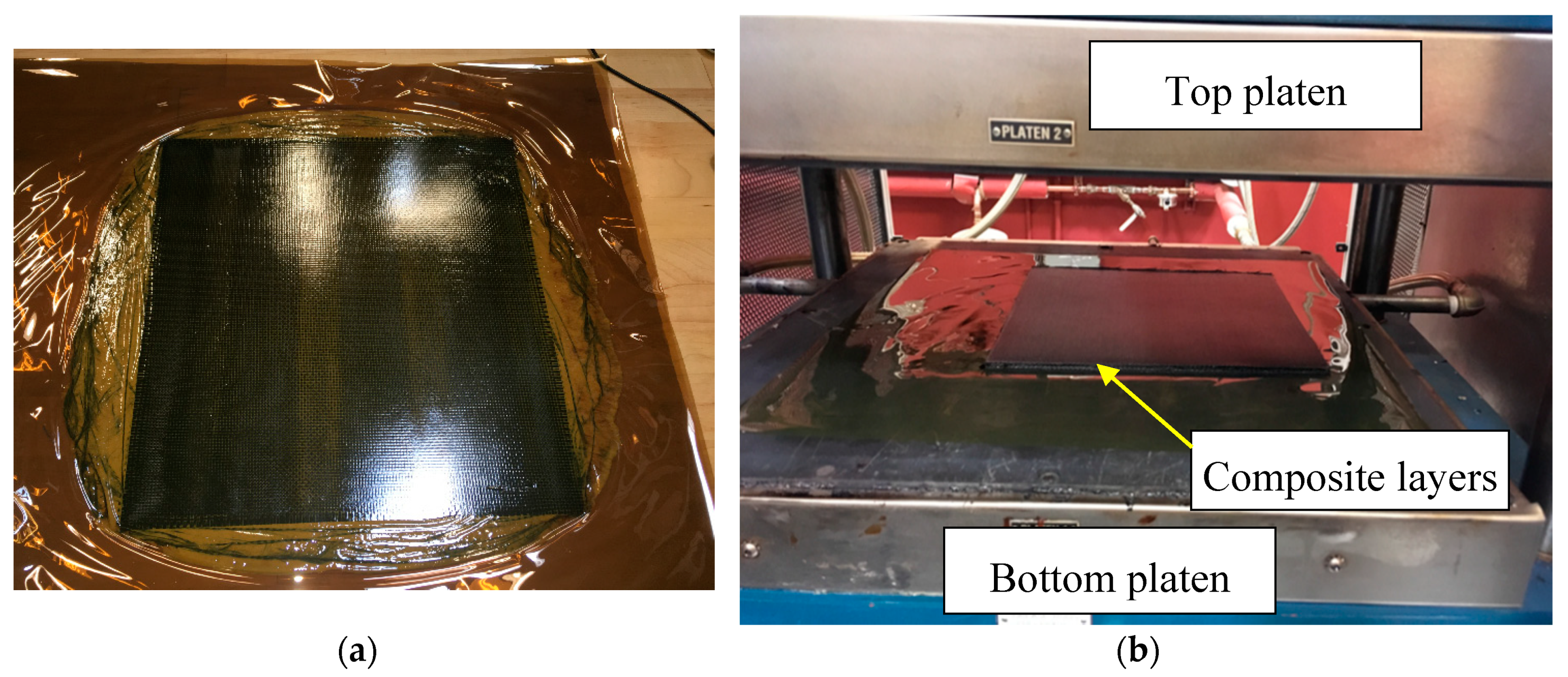
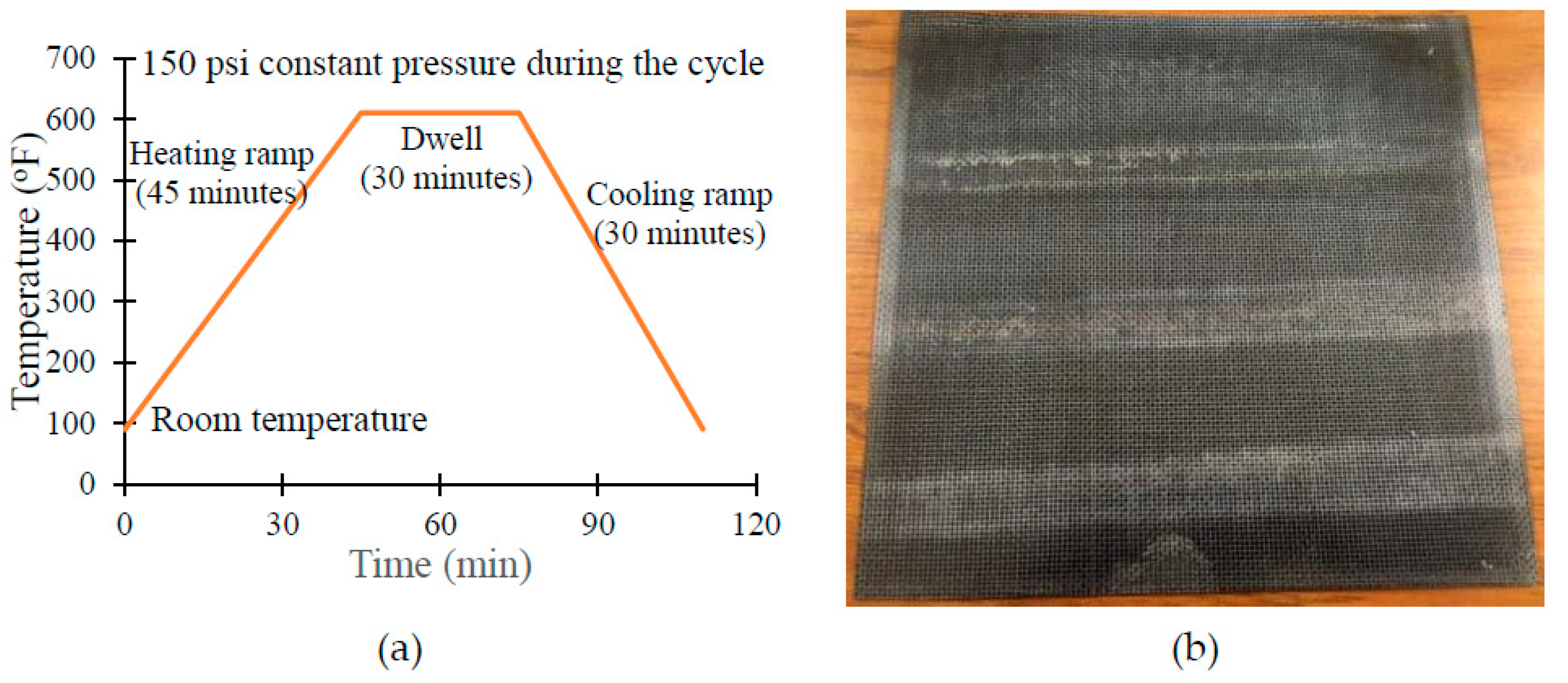
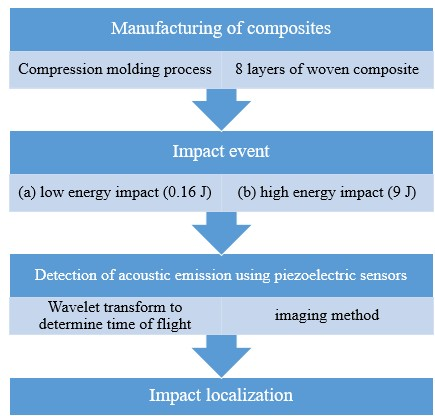
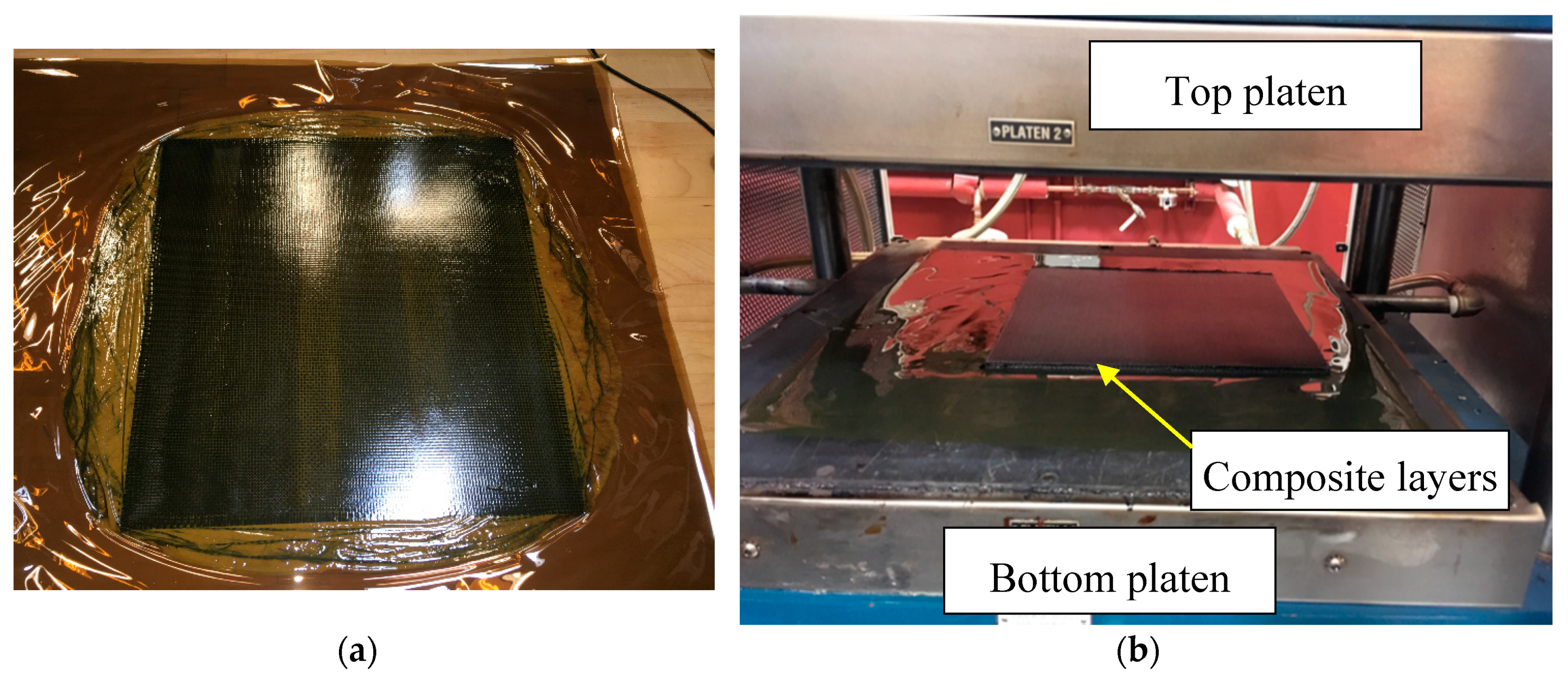
2. Composite Plate Manufacturing Using Compression Molding Process
3. Impact Detection and Localization Using Structural Health Monitoring Technique
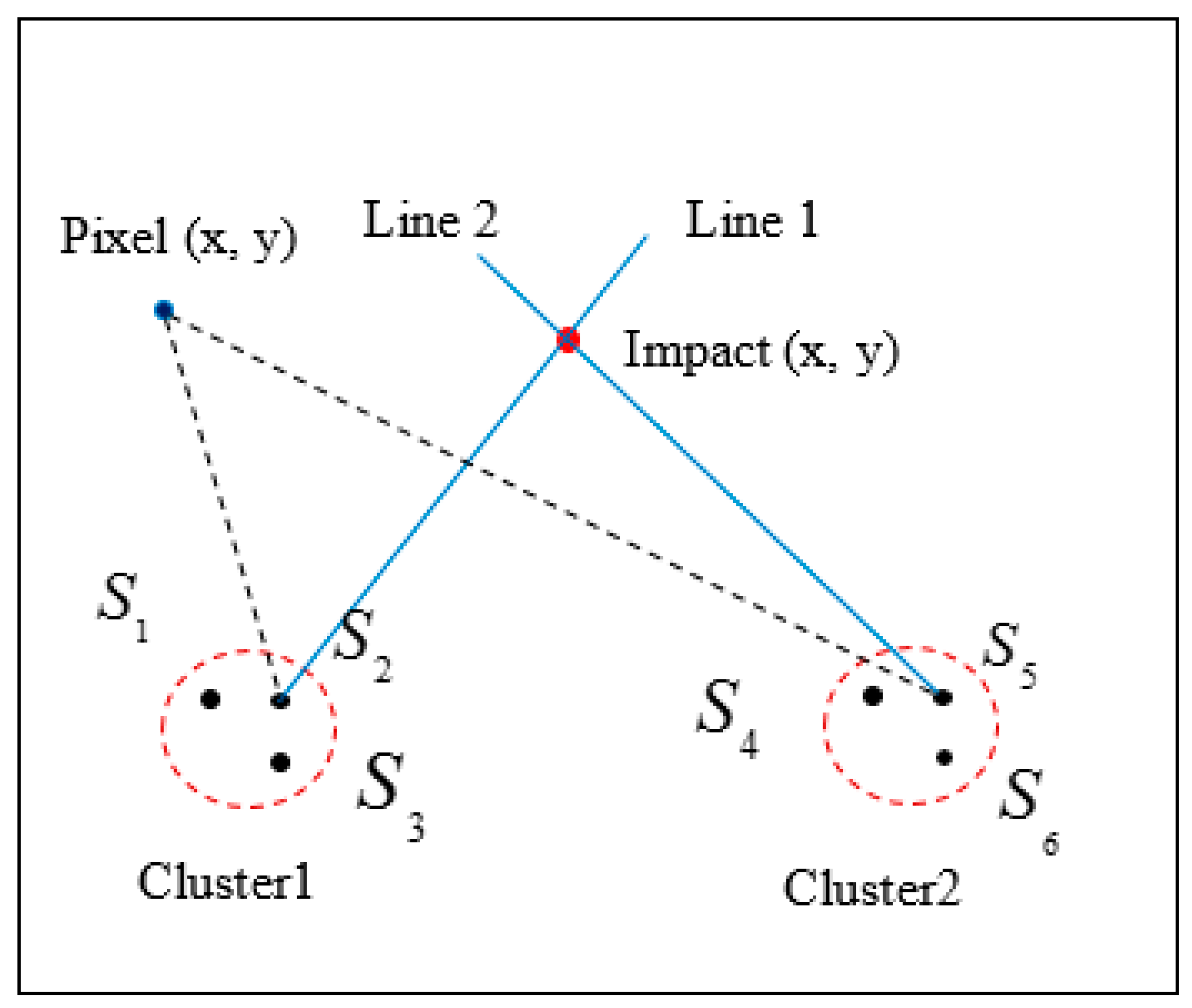
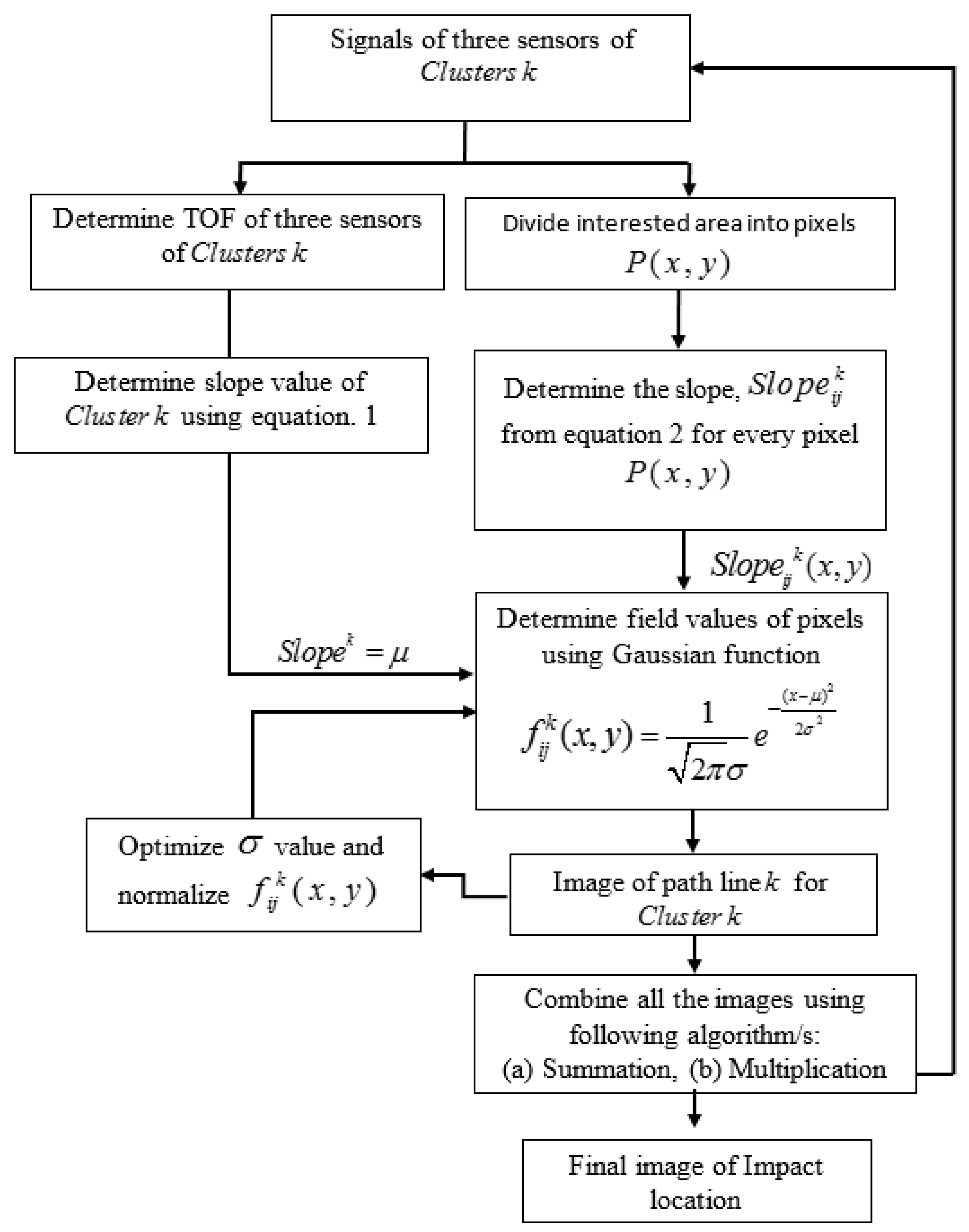
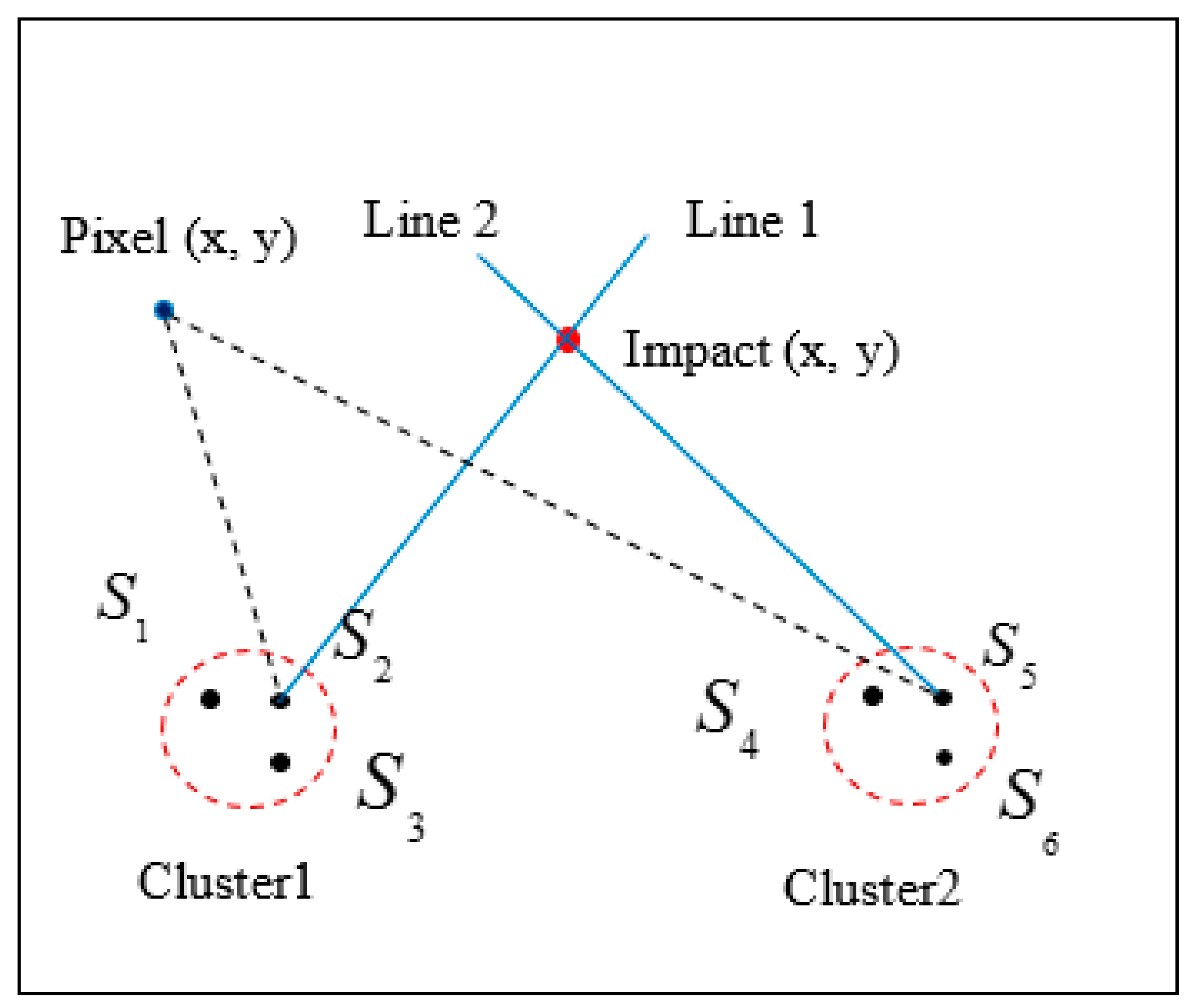
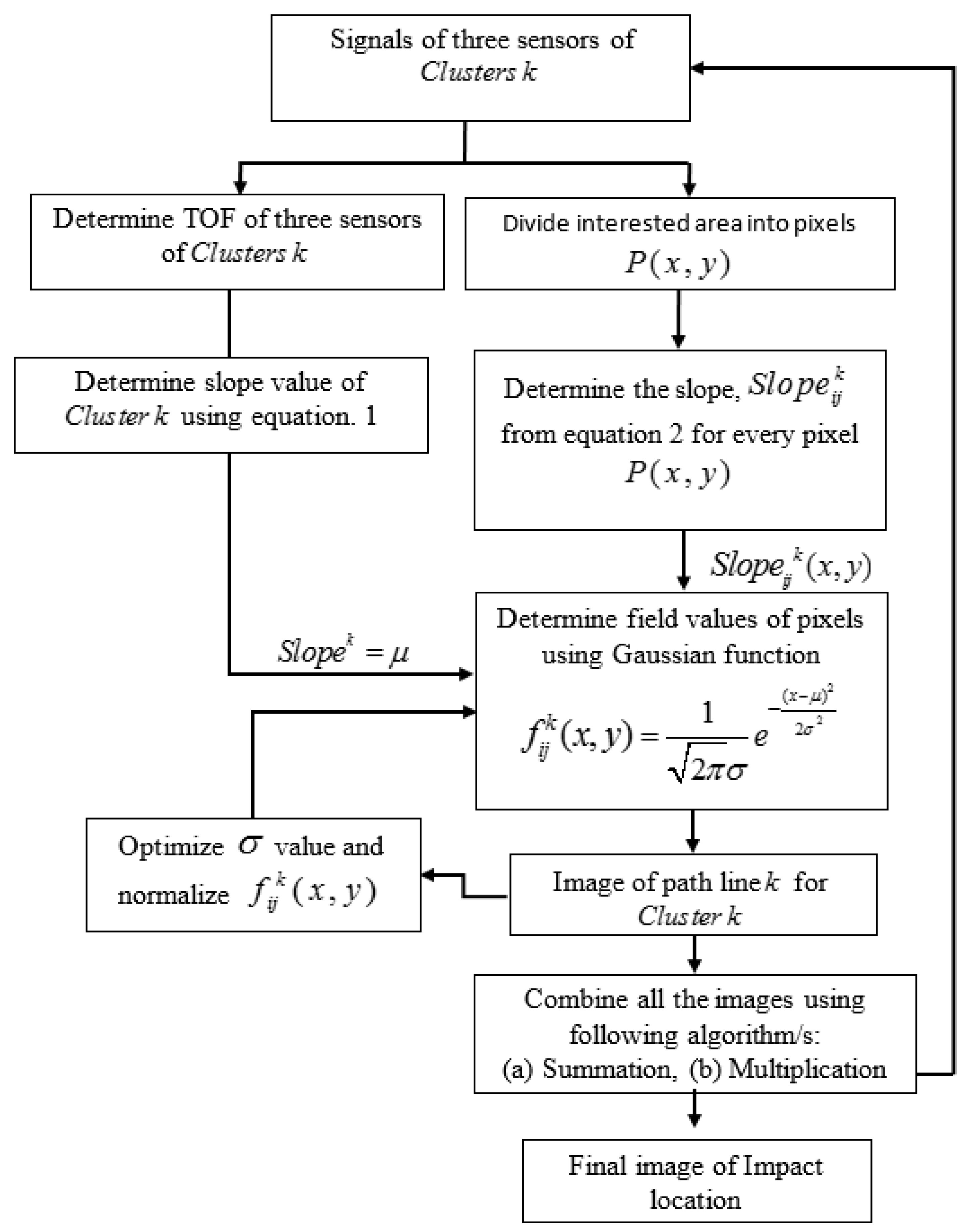
3.1. Developing Imaging Method
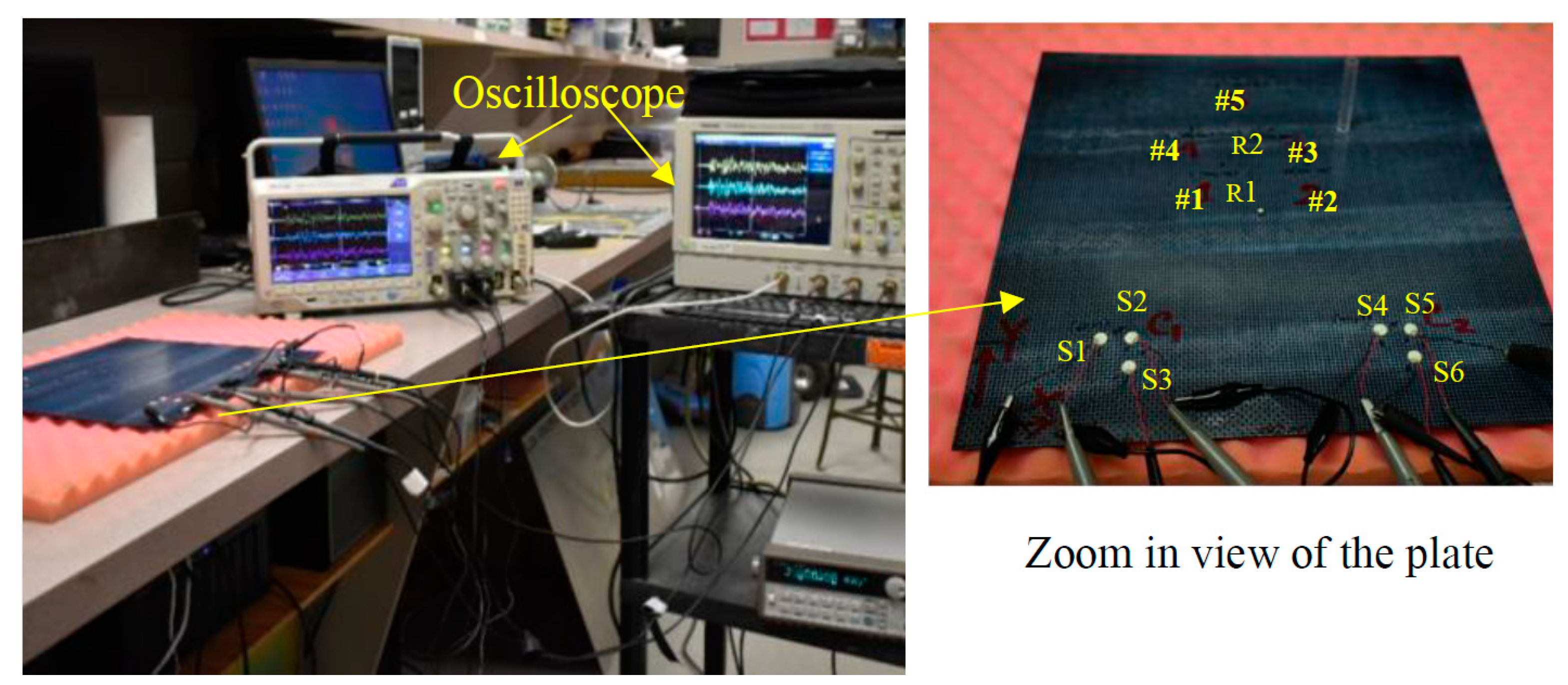
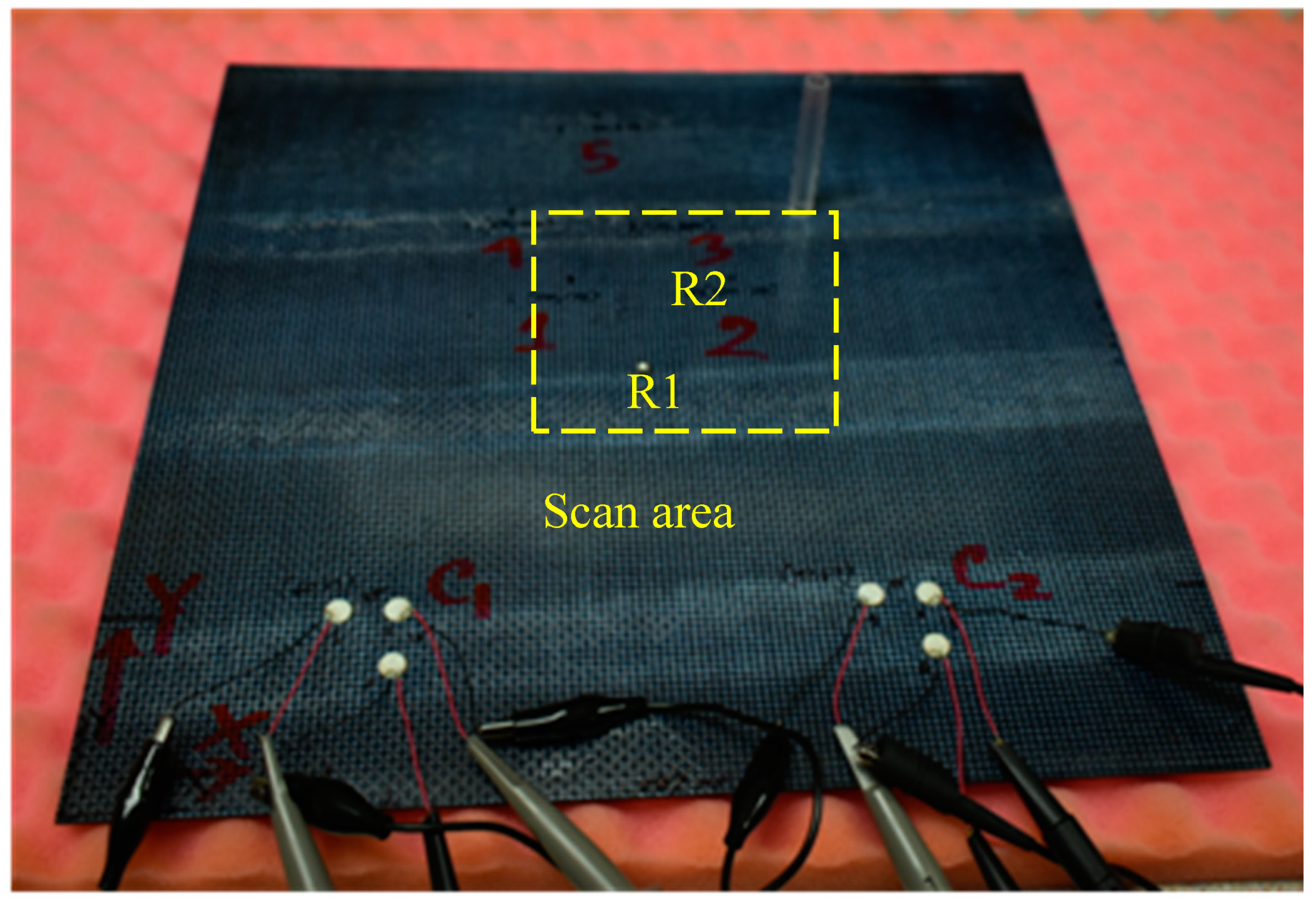
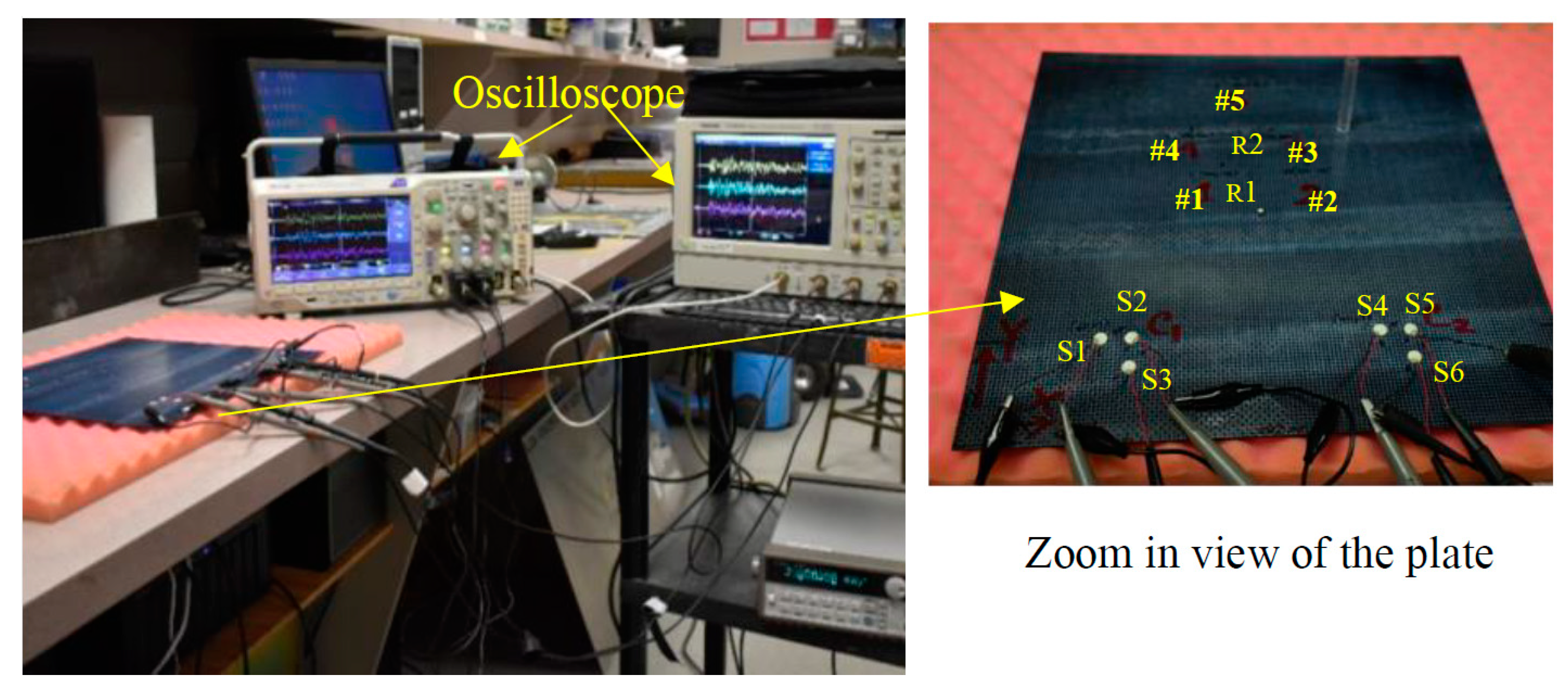
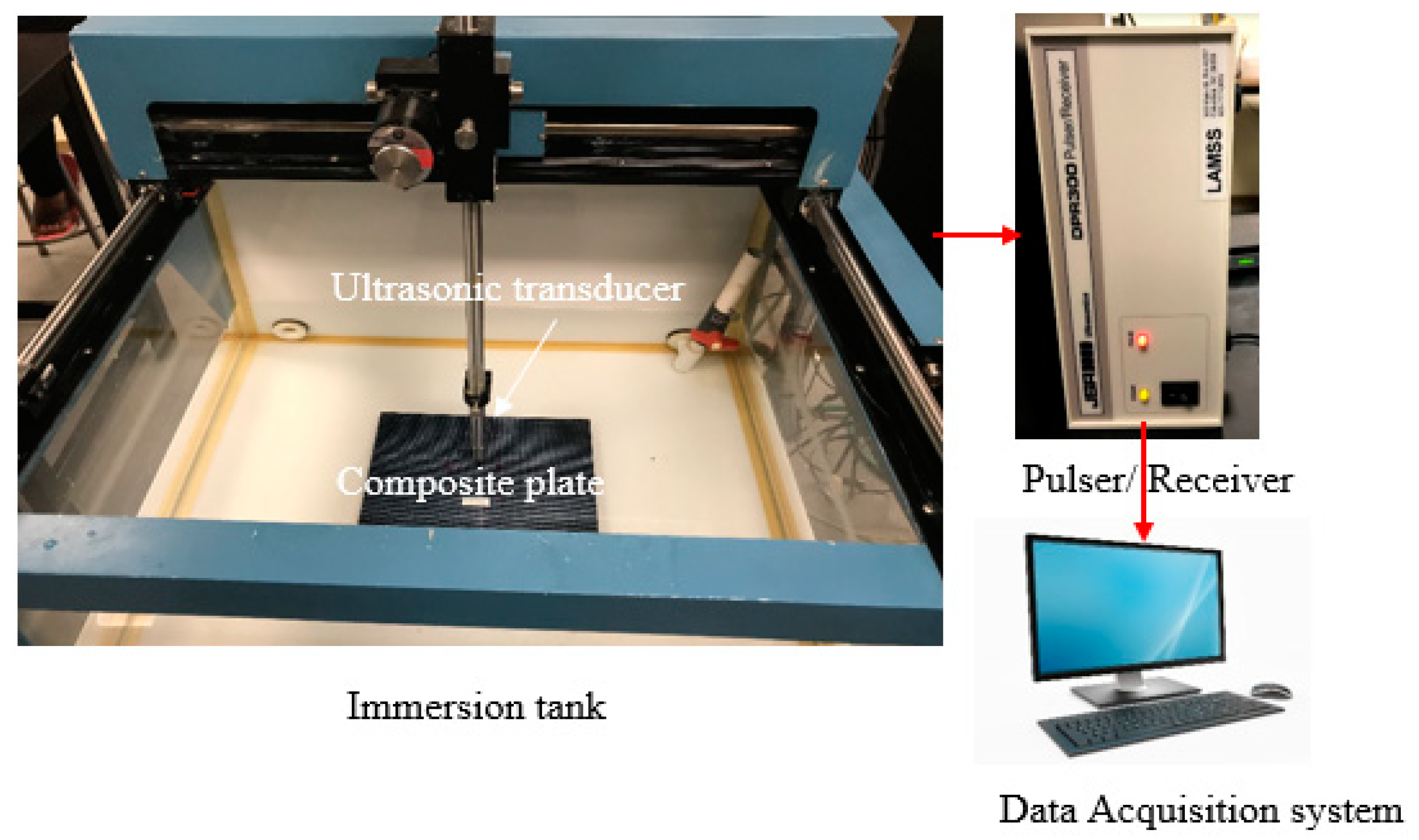
3.2. SHM Experimental Setup for Impact Detection and Localization
3.3. Low-Energy Impact Method
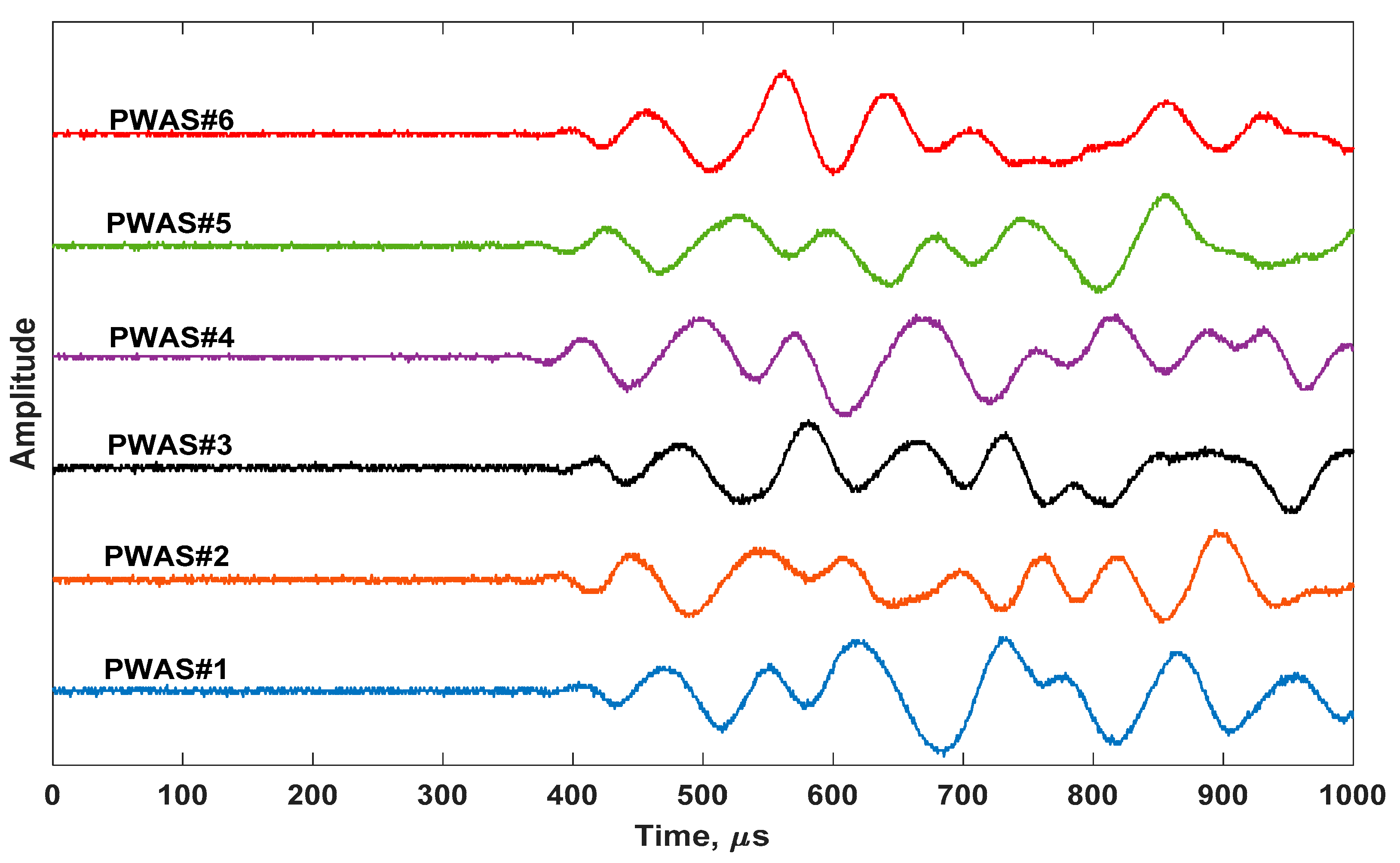
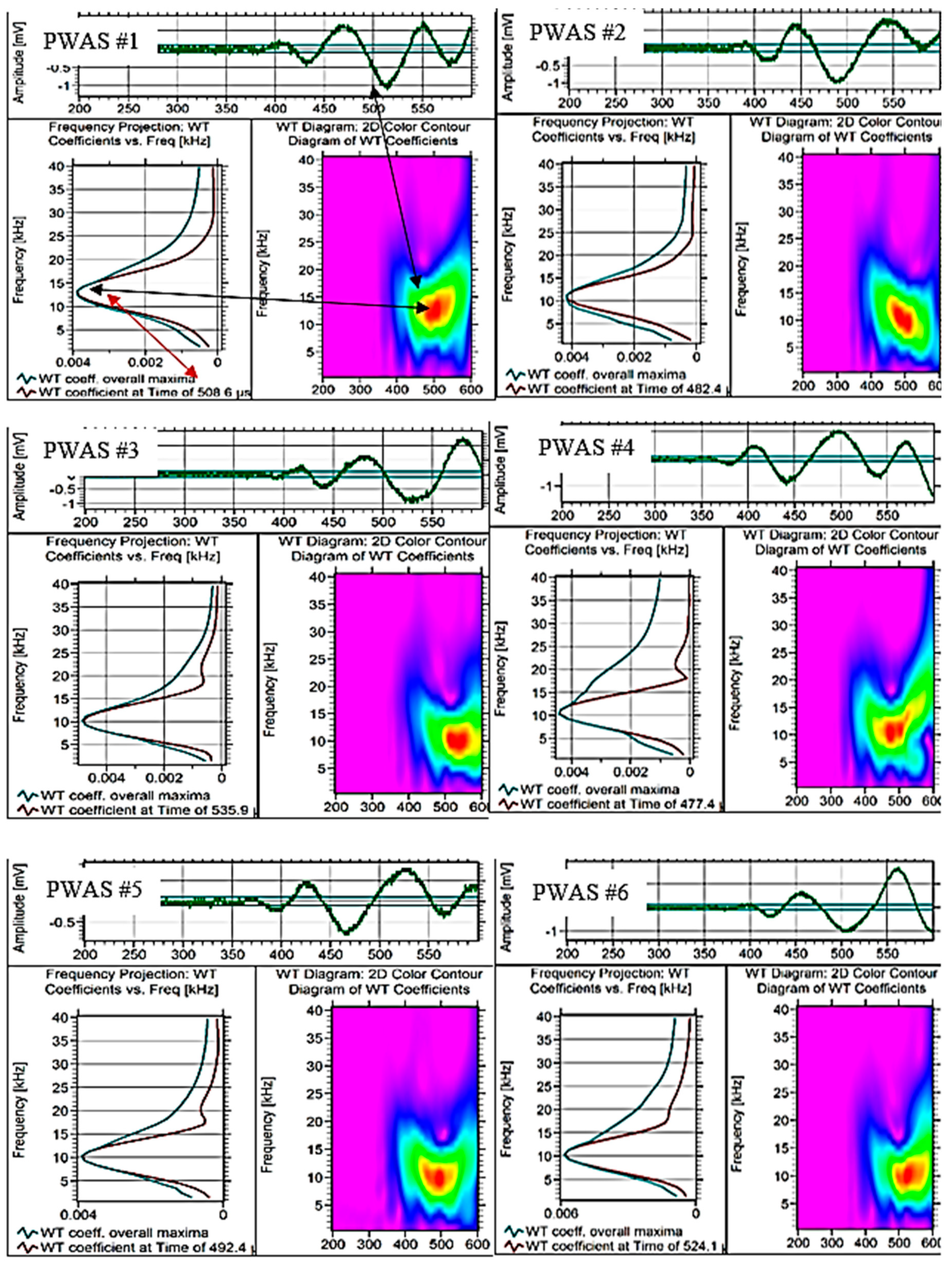
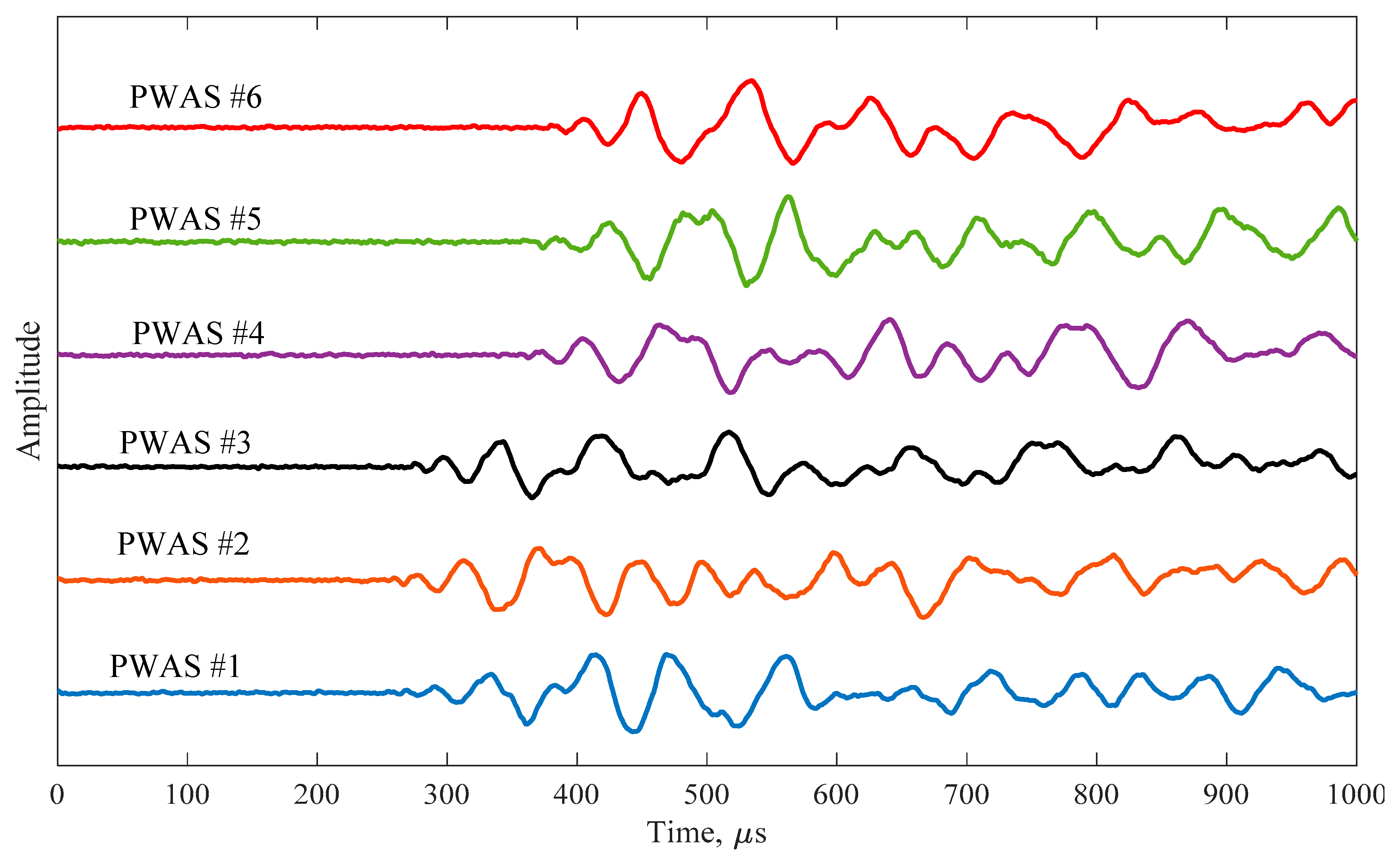
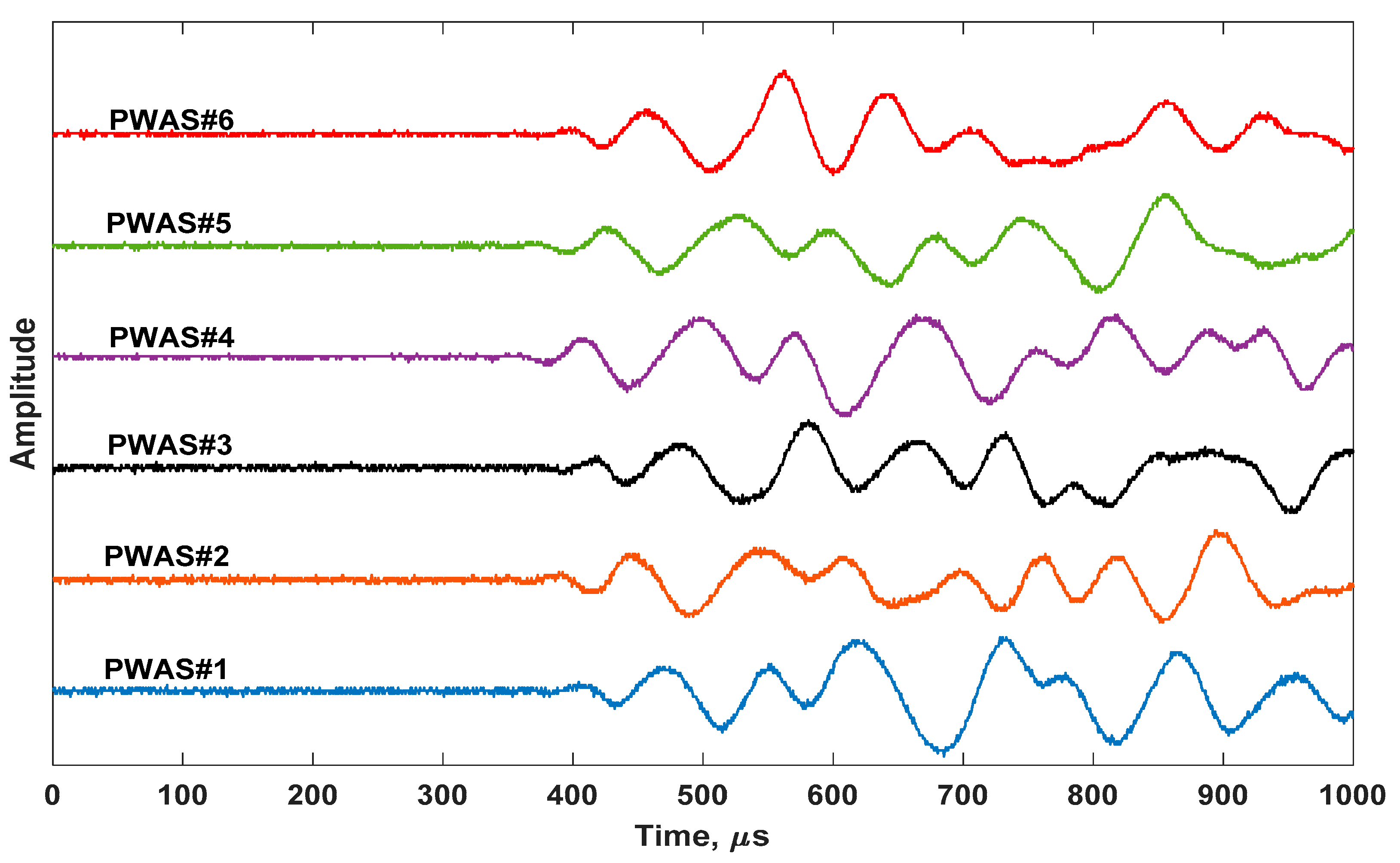
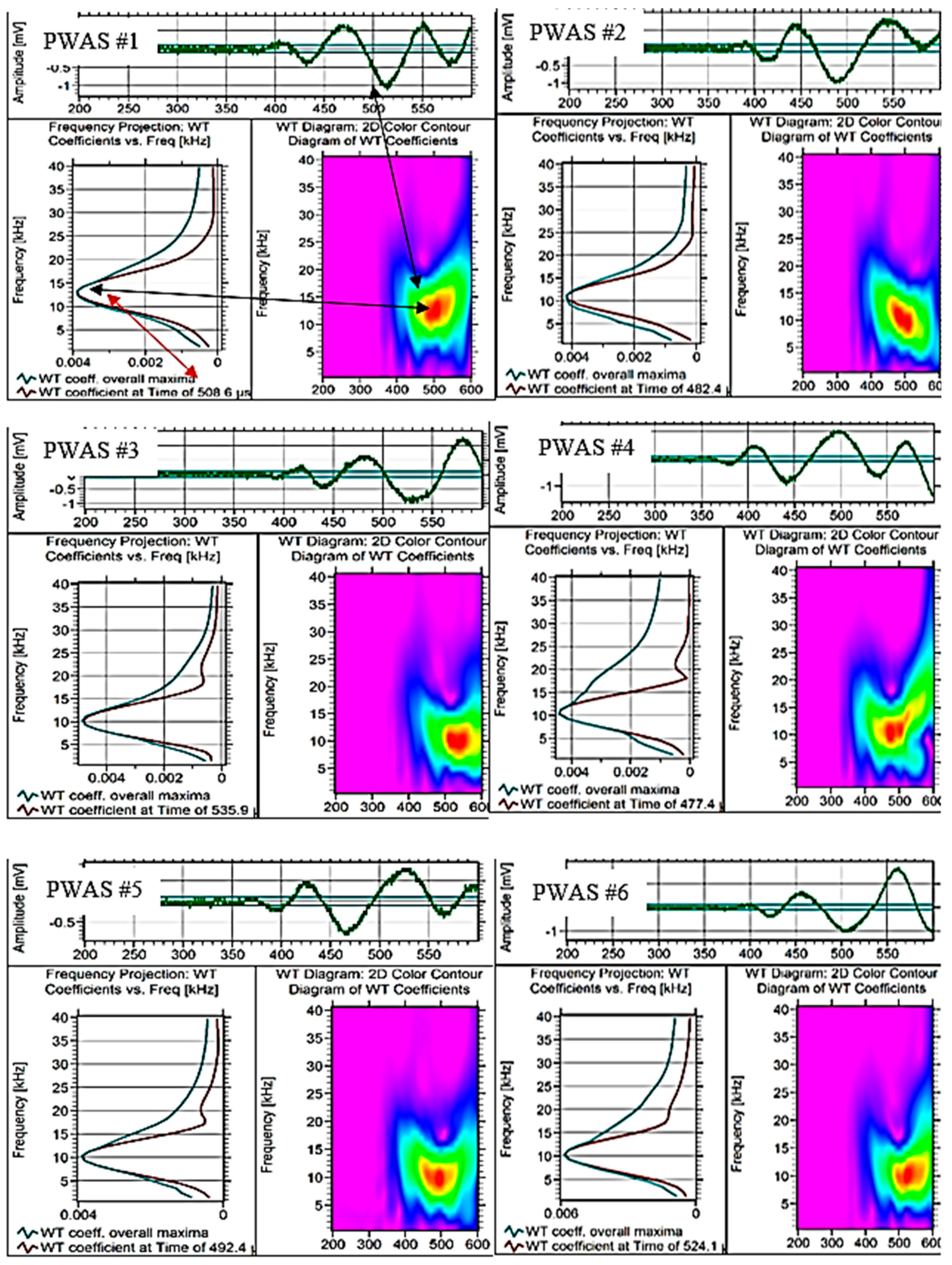
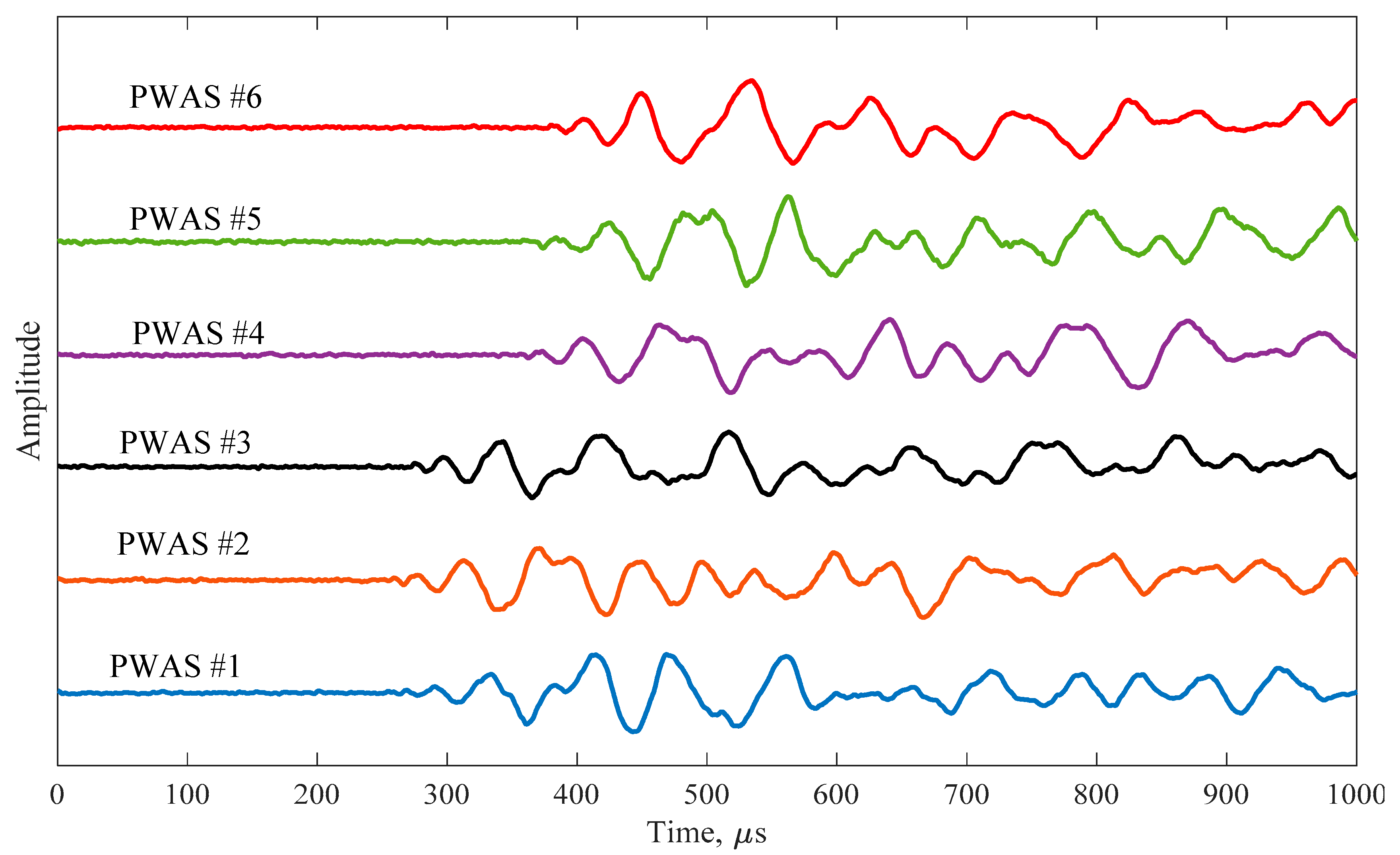
3.3.1. Experimental Signal Analysis and Impact Detection
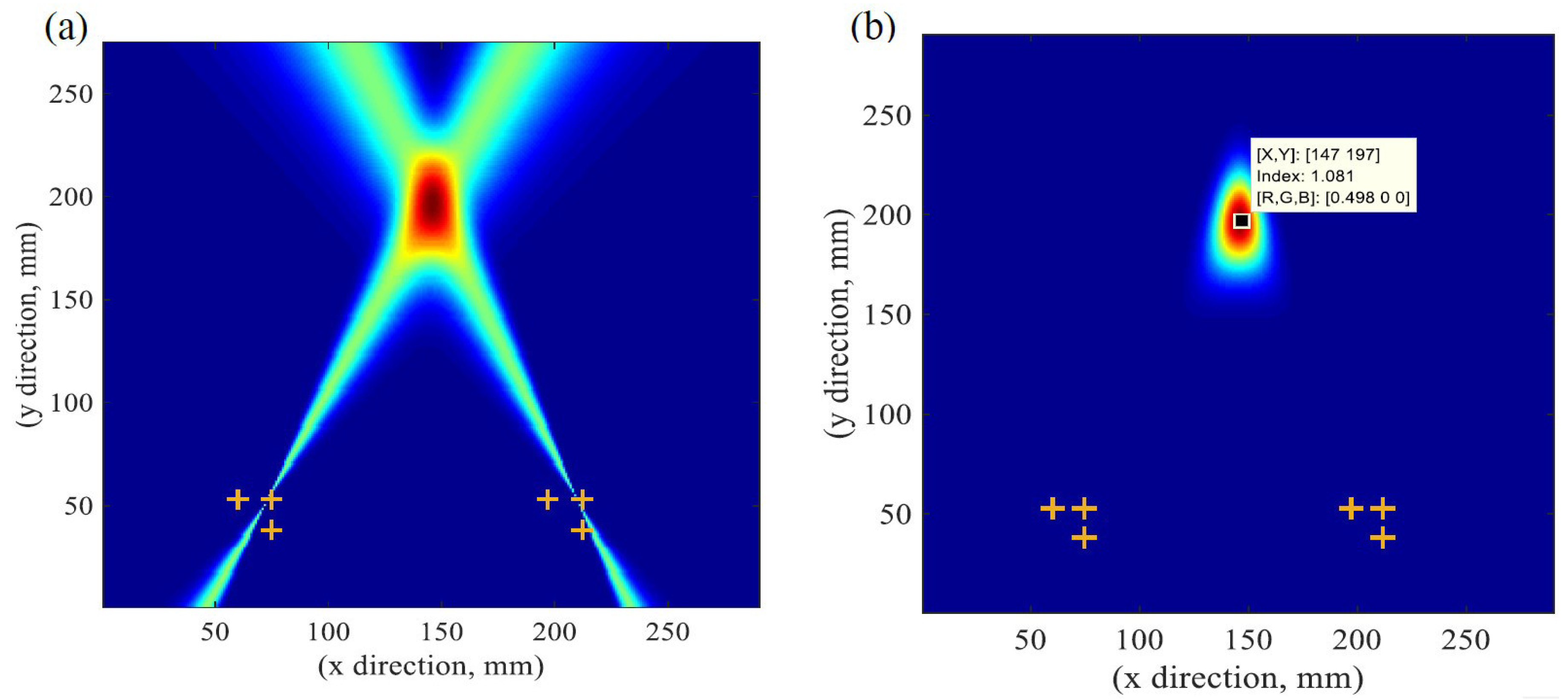
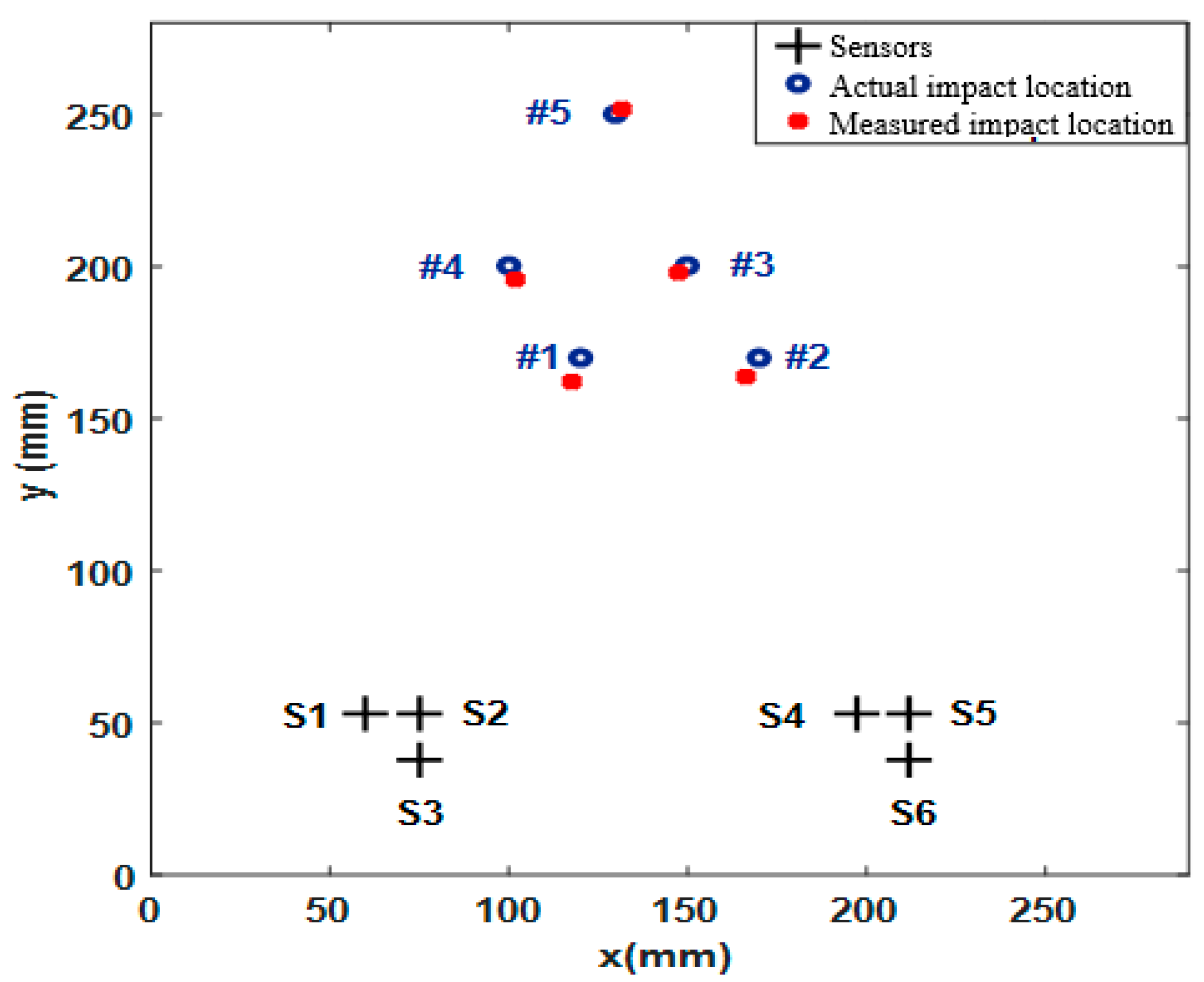
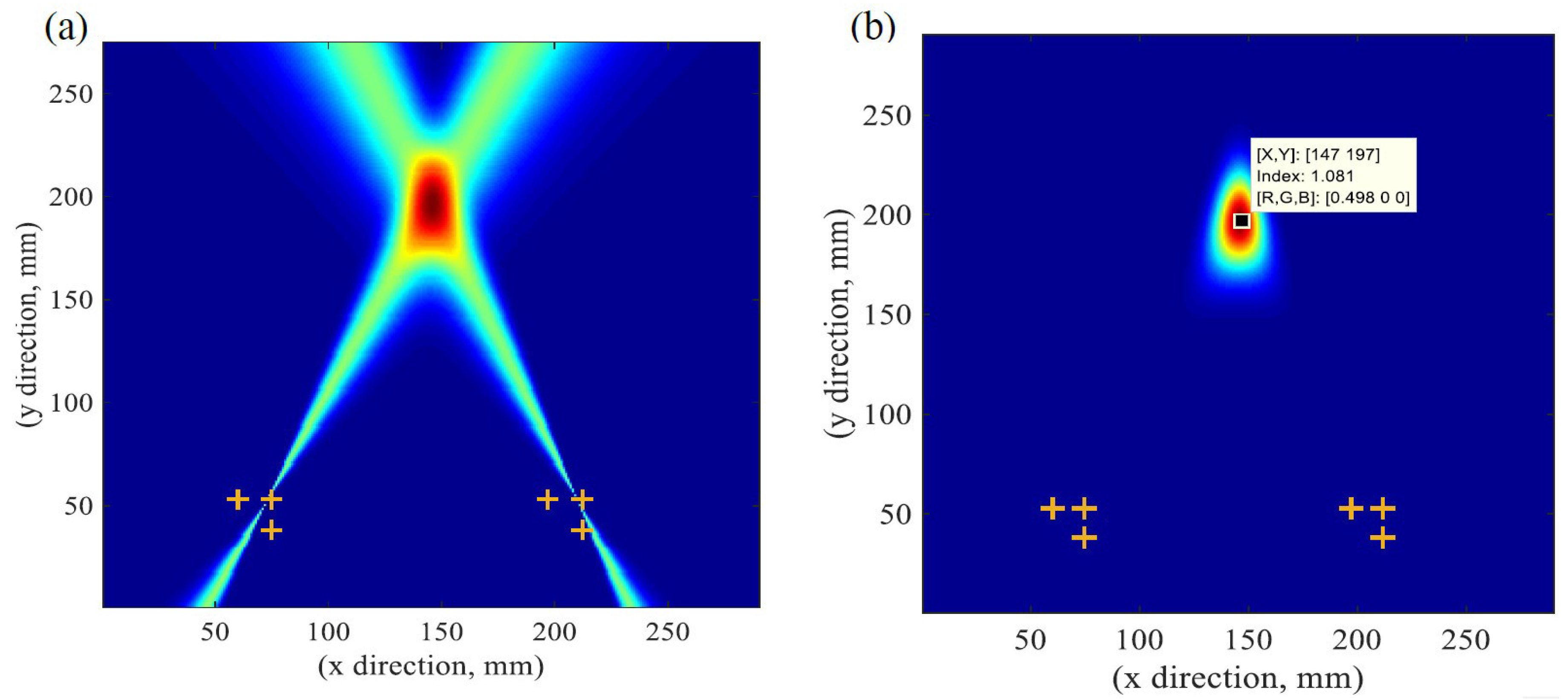
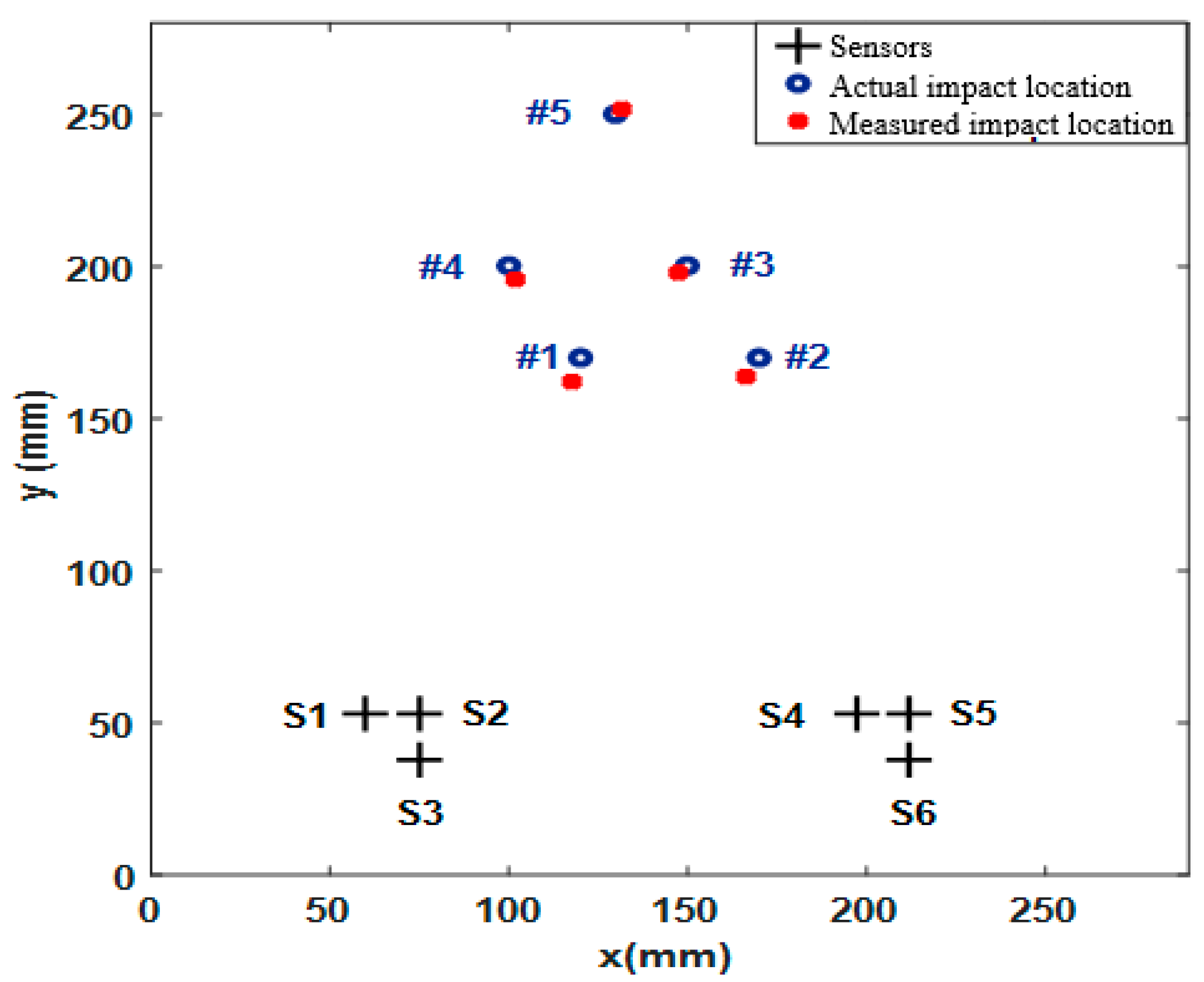
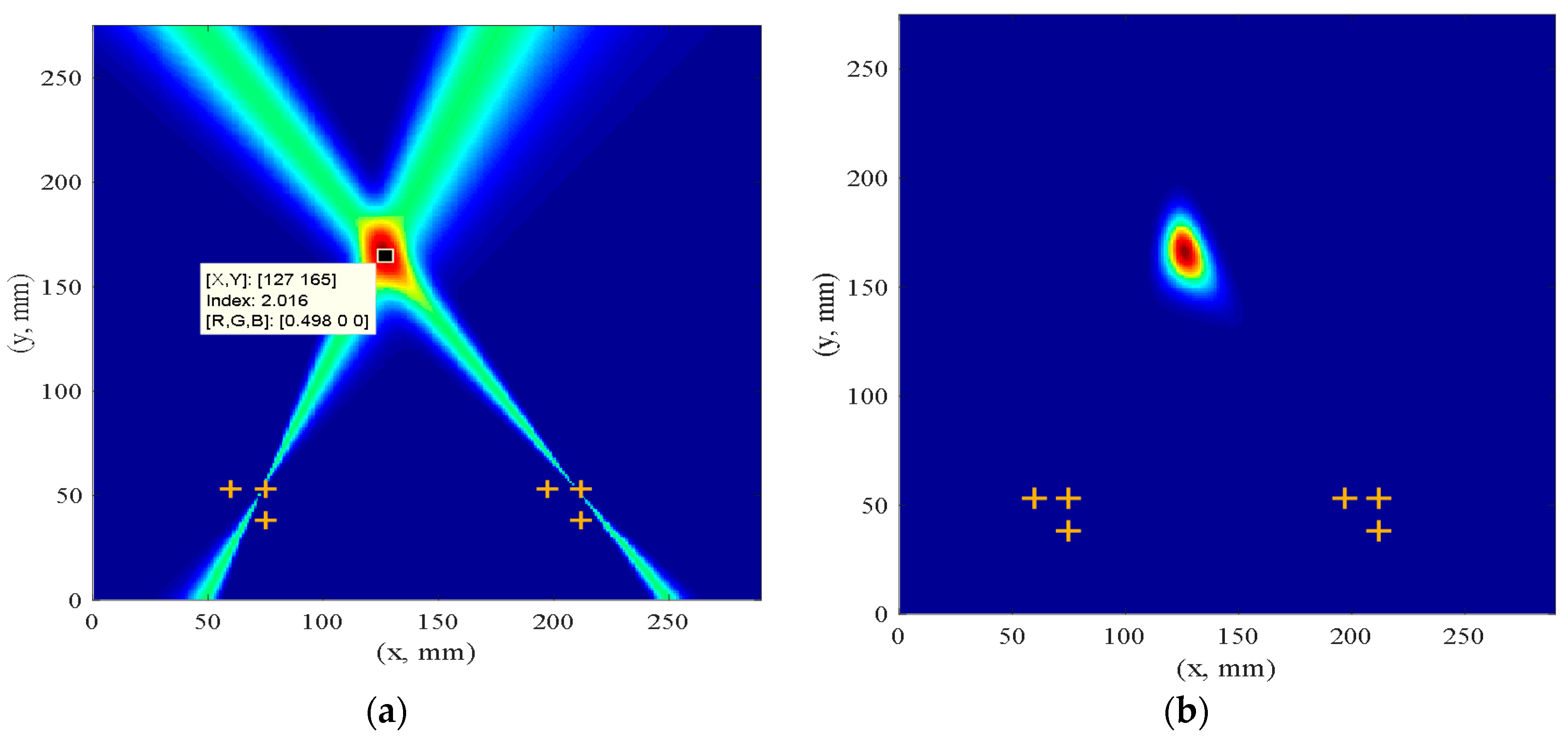
3.3.2. Low-Energy Impact Localization
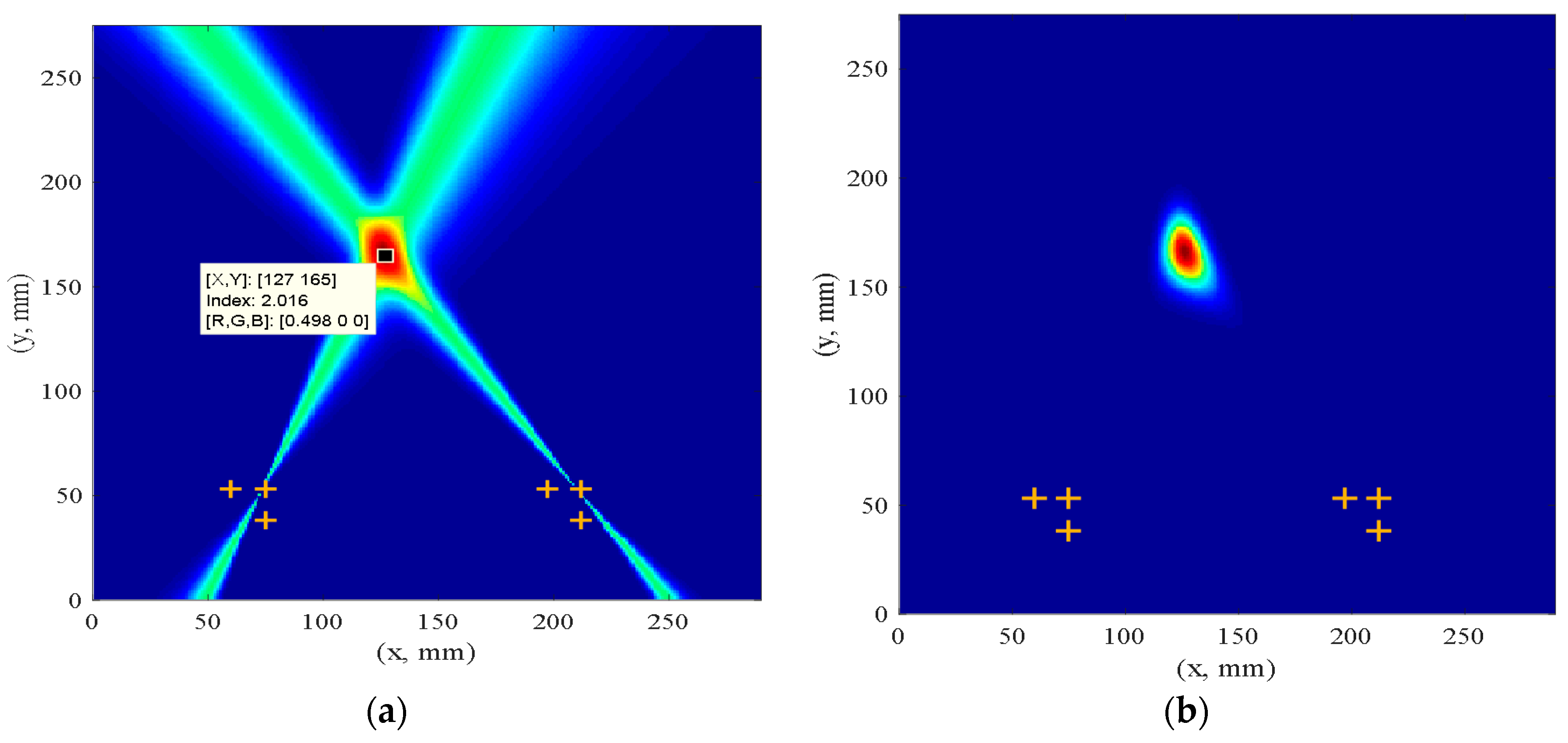
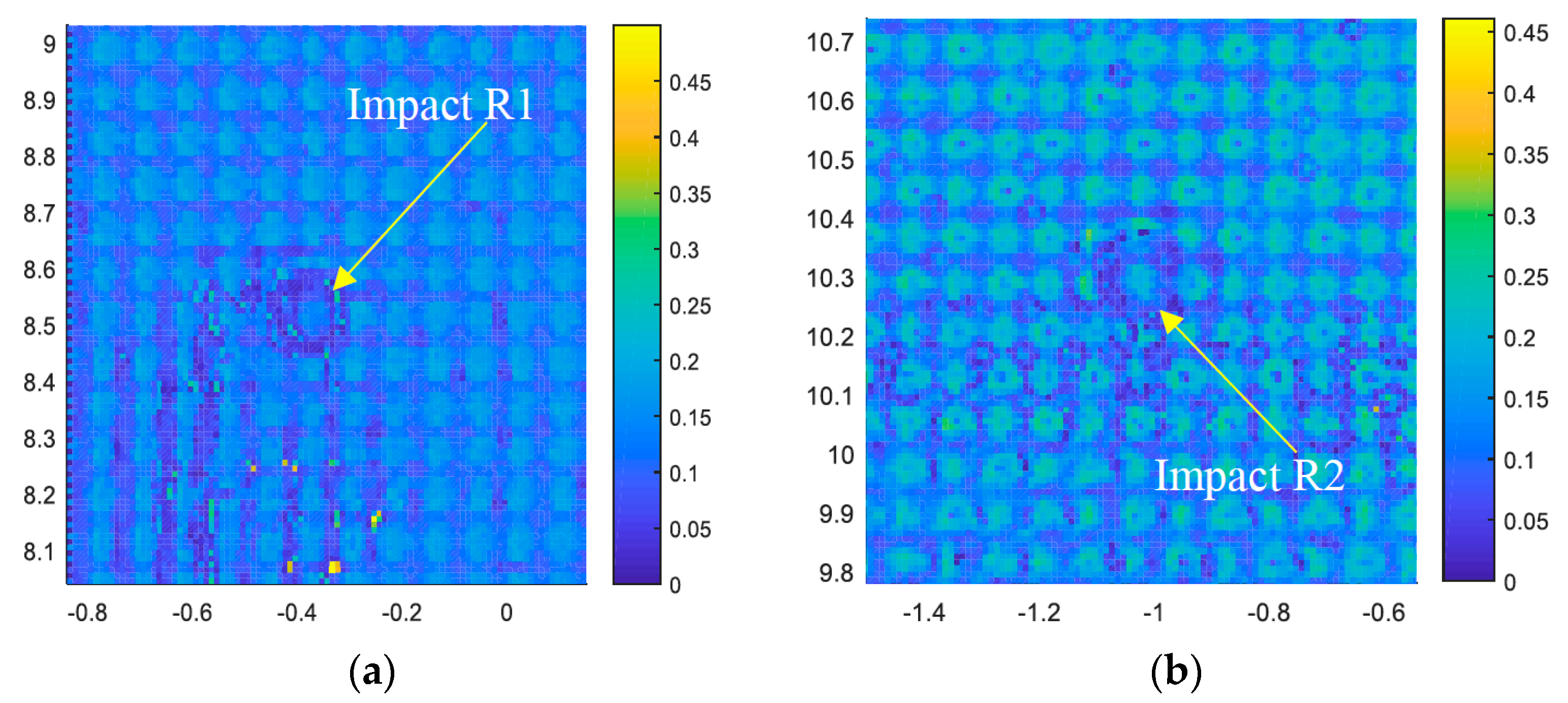
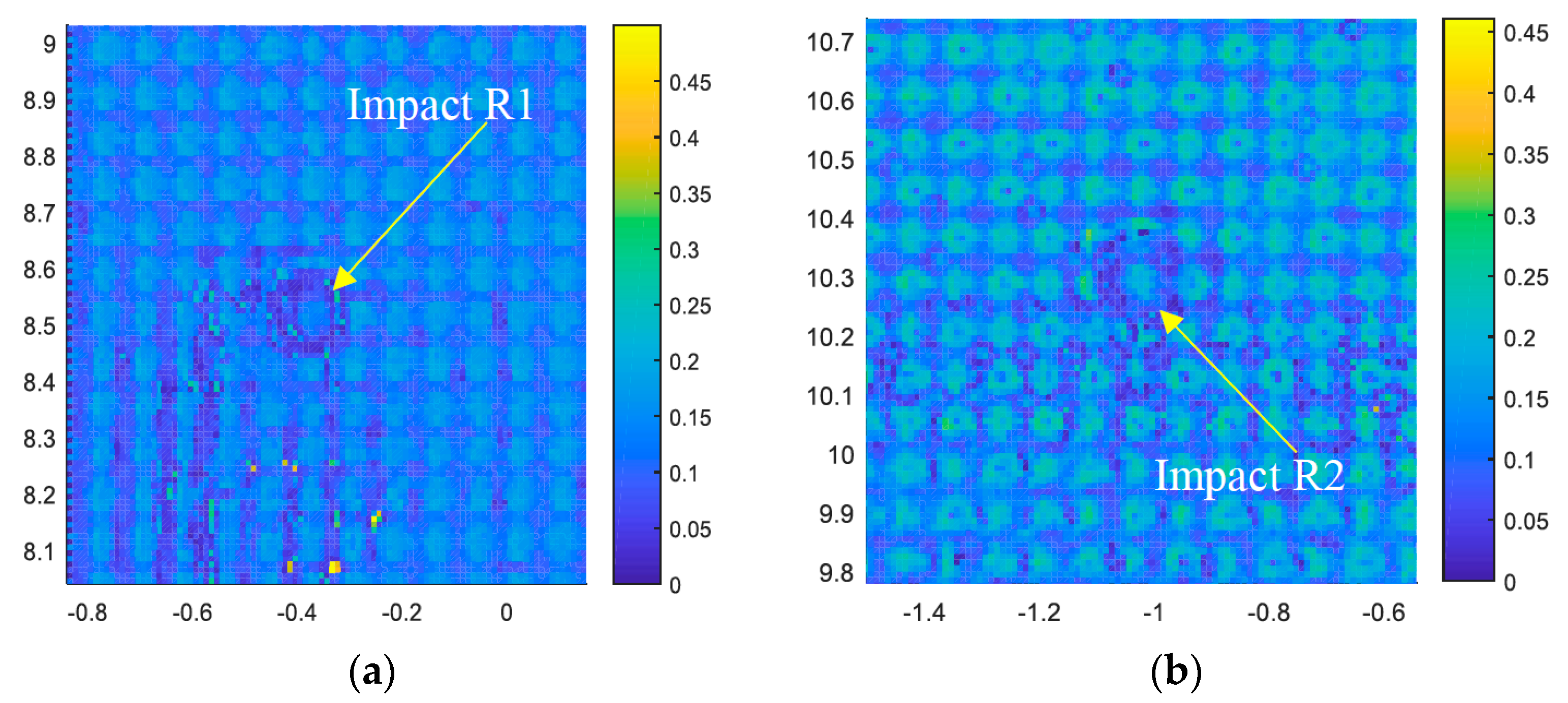
3.4. High-Energy Impact Method
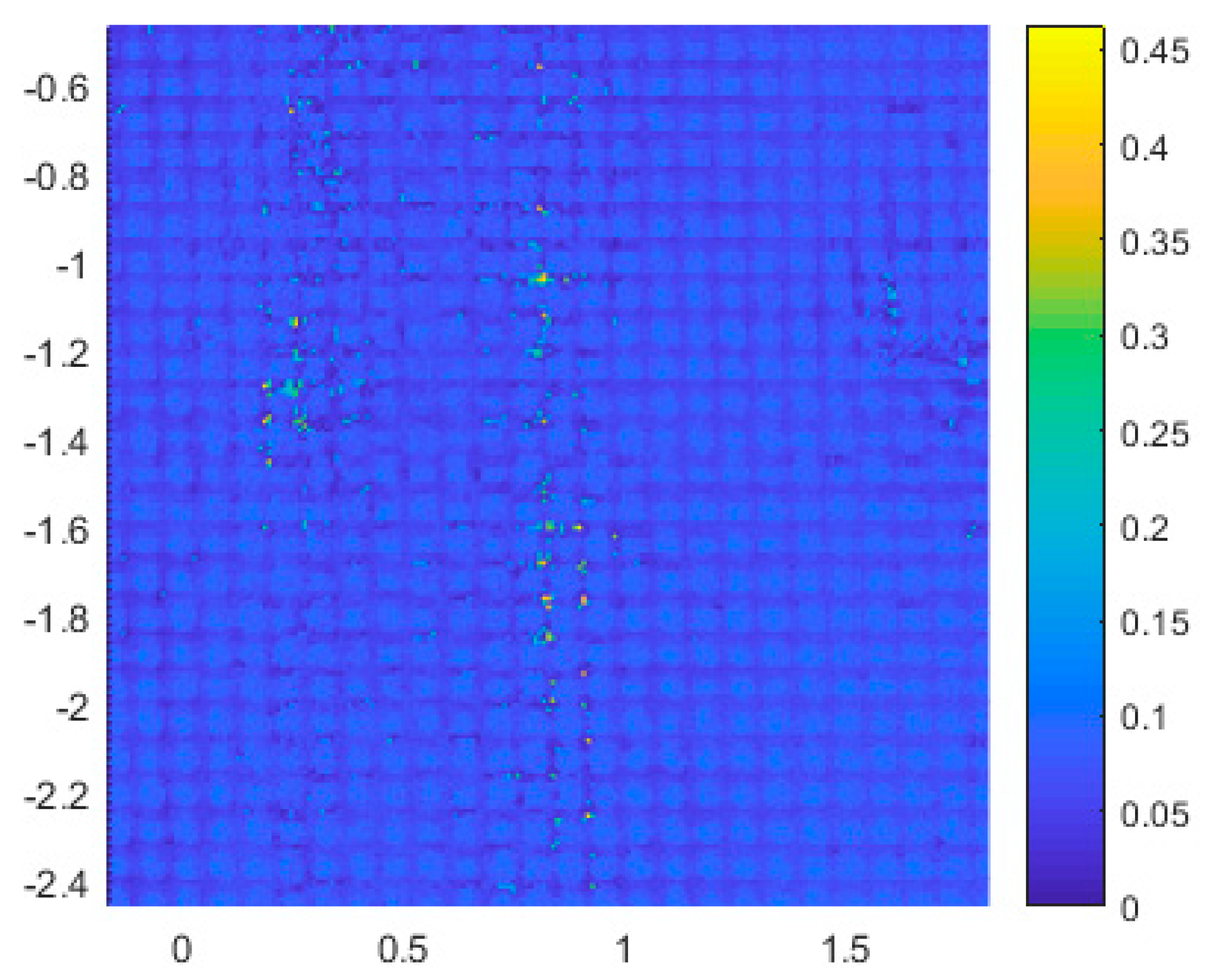
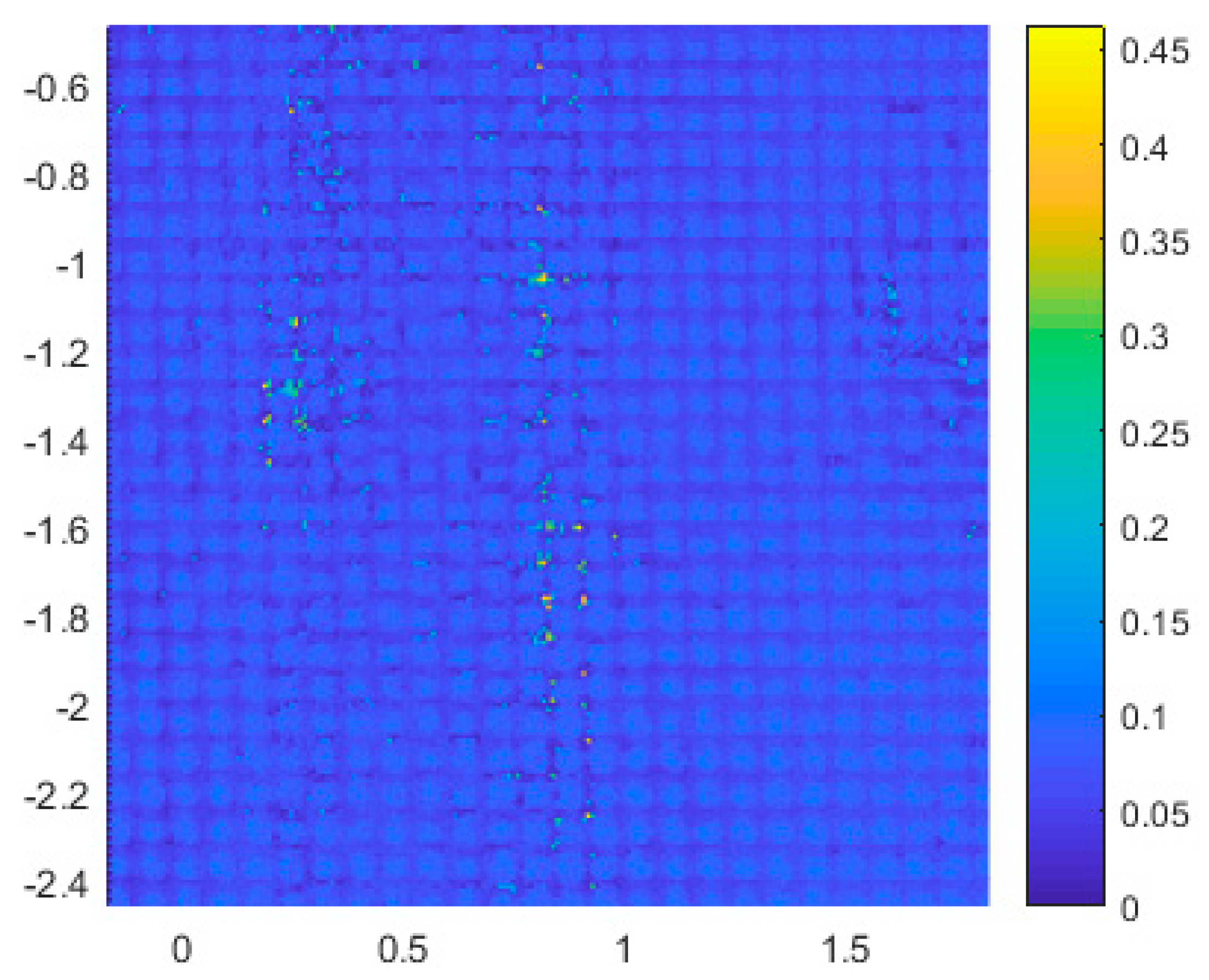
4. Nondestructive Inspection (NDI) of the Composite Plate Using Immersion Ultrasonic Testing
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Zabihi, O.; Ahmadi, M.; Nikafshar, S.; Preyeswary, K.C.; Naebe, M. A technical review on epoxy-clay nanocomposites: Structure, properties, and their applications in fiber reinforced composites. Compos. Part B Eng. 2018, 135, 1–24. [Google Scholar] [CrossRef]
- Molent, L.; Forrester, C. The lead crack concept applied to defect growth in aircraft composite structures. Compos. Struct. 2017, 166, 22–26. [Google Scholar] [CrossRef]
- Haider, M.F.; Majumdar, P.K.; Angeloni, S.; Reifsnider, K.L. Nonlinear anisotropic electrical response of carbon fiber-reinforced polymer composites. J. Compos. Mater. 2017. [Google Scholar] [CrossRef]
- Rassel, R.; Adkins, J.M.; Baker, J.; Rabbi, F.; Reifsnider, K. Relationship of dielectric property change to composite material state degradation. Compos. Sci. Technol. 2014, 105, 160–165. [Google Scholar]
- Ciampa, F.; Meo, M. A new algorithm for acoustic emission localization and flexural group velocity determination in anisotropic structures. Compos. A Appl. Sci. Manuf. 2010, 41, 1777–1786. [Google Scholar] [CrossRef]
- Kundu, T. Acoustic source localization. Ultrasonics 2014, 54. [Google Scholar] [CrossRef] [PubMed]
- Kessler, S.S.; Spearing, S.M.; Soutis, C. Damage detection in composite materials using Lamb wave methods. Smart Mater. Struct. 2002, 11, 269. [Google Scholar] [CrossRef]
- Giurgiutiu, V. Structural Health Monitoring with Piezoelectric Wafer Active Sensors, 2nd ed.; Academic Press: Oxford, MS, USA, 2014. [Google Scholar]
- Qing, X.P.; Beard, S.J.; Kumar, A.; Ooi, T.K.; Chang, F.-K. Built-in Sensor Network for Structural Health Monitoring of Composite Structure. J. Intell. Mater. Syst. Struct. 2006, 18, 39–49. [Google Scholar] [CrossRef]
- Michaels, J.E.; Michaels, T.E. Guided wave signal processing and image fusion for in situ damage localization in plates. Wave Motion 2007, 44, 482–492. [Google Scholar] [CrossRef]
- Bergman, J.; Chung, H.; Janapati, V.; Li, I.; Kumar, A.; Kumar-Yadav, S.; Chapman, D.; Nissan, A.; Sarrafi-Nour, R. Evaluation of the Real-Time Active Pipeline Integrity Detection System for Corrosion Quantification; NACE International: Houston, TX, USA, 2016. [Google Scholar]
- Tobias, A. Acoustic-emission source location in two dimensions by an array of three sensors. Non-Destr. Test. 1976, 9, 9–12. [Google Scholar] [CrossRef]
- Bhuiyan, M.Y.; Giurgiutiu, V. The signatures of acoustic emission waveforms from fatigue crack advancing in thin metallic plates. Smart Mater. Struct. 2017, 27, 1–15. [Google Scholar] [CrossRef]
- Ebrahimkhanlou, A.; Salamone, S. A probabilistic framework for single-sensor acoustic emission source localization in thin metallic plates. Smart Mater. Struct. 2017, 26, 95026. [Google Scholar] [CrossRef]
- Frieden, J.; Cugnoni, J.; Botsis, J.; Gmür, T. Low energy impact damage monitoring of composites using dynamic strain signals from FBG sensors—Part I: Impact detection and localization. Compos. Struct. 2012, 94, 438–445. [Google Scholar] [CrossRef]
- Ciampa, F.; Meo, M. Impact detection in anisotropic materials using a time reversal approach. Struct. Health Monit. 2012, 11, 43–49. [Google Scholar] [CrossRef] [Green Version]
- Salamone, S.; Bartoli, I.; di Leo, P.; di Scala, F.L.; Ajovalasit, A.; D’Acquisto, L.; Rhymer, J.; Kim, H. High-velocity impact location on aircraft panels using macro-fiber composite piezoelectric rosettes. J. Intell. Mater. Syst. Struct. 2010, 21, 887–896. [Google Scholar] [CrossRef]
- Kundu, T.; Das, S.; Martin, S.A.; Jata, K.V. Locating point of impact in anisotropic fiber reinforced composite plates. Ultrasonics 2008, 48, 193–201. [Google Scholar] [CrossRef] [PubMed]
- Jiao, J.; He, C.; Wu, B.; Fei, R.; Wang, X. A new acoustic emission source location technique based on wavelet transform and mode analysis. Front. Mech. Eng. China 2006, 1, 341–345. [Google Scholar] [CrossRef]
- Haider, M.F.; Bhuiyan, M.Y.; Poddar, B.; Lin, B.; Giurgiutiu, V. Analytical and experimental investigation of the interaction of Lamb waves in a stiffened aluminum plate with a horizontal crack at the root of the stiffener. J. Sound Vib. 2018, 431, 212–225. [Google Scholar] [CrossRef]
- Baghalian, A.; Tashakori, S.; Senyurek, V.Y.; McDaniel, D.; Fekrmandi, H.; Tansel, I.N. Non-contact quantification of longitudinal and circumferential defects in pipes using the surface response to excitation (SuRE) method. Int. J. Progn. Health Manag. 2017, 8, 1–8. [Google Scholar]
- Haider, M.F.; Giurgiutiu, V.; Lin, B.; Yu, L. Irreversibility effects in piezoelectric wafer active sensors after exposure to high temperature. Smart Mater. Struct. 2017, 26, 095019. [Google Scholar] [CrossRef]
- Kundu, T. A new technique for acoustic source localization in an anisotropic plate without knowing its material properties. In Proceedings of the 6th European Workshop on Structural Health Monitoring, Dresden, Germany, 3–6 July 2012. [Google Scholar]
- Migot, A.; Giurgiutiu, V. Impact localization on a composite plate with unknown material properties using PWAS transducers and wavelet transform. In Proceedings of the ASME 2017 International Mechanical Engineering Congress and Exposition, Tampa, FL, USA, 3–9 November 2017; pp. 1–8. [Google Scholar]
- Wang, C.H.; Rose, J.T.; Chang, F.-K. A synthetic time-reversal imaging method for structural health monitoring. Smart Mater. Struct. 2004, 13, 415–423. [Google Scholar] [CrossRef]
- Vallen-System, GmbH. Munich, Germany. 2001. Available online: http://www.vallen.de/wavelet/index.html (accessed on 24 August 2018).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Impact Event | Actual Location (x, y) mm | Measured Location (x, y) mm | % of Error (Based on Sensor Cluster1) |
|---|---|---|---|
| #1 | (120, 170) | (117.7, 161.9) | 6.7% |
| #2 | (170, 170) | (166, 163.8) | 4.8% |
| #3 | (150, 200) | (147.4, 197.8) | 1.9% |
| #4 | (100, 200) | (101.8, 195.5) | 2.7% |
| #5 | (130, 250) | (131.7, 251.6) | 0.9% |
| Impact Event | Actual Location (x, y) mm | Measured Location (x, y) mm | % of Error (Based on Sensor Cluster1) |
|---|---|---|---|
| #1 | (128, 167) | (127, 165) | 2.4% |
| #2 | (147, 207) | (146, 204) | 2.8% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Faisal Haider, M.; Migot, A.; Bhuiyan, M.Y.; Giurgiutiu, V. Experimental Investigation of Impact Localization in Composite Plate Using Newly Developed Imaging Method. Inventions 2018, 3, 59. https://doi.org/10.3390/inventions3030059
Faisal Haider M, Migot A, Bhuiyan MY, Giurgiutiu V. Experimental Investigation of Impact Localization in Composite Plate Using Newly Developed Imaging Method. Inventions. 2018; 3(3):59. https://doi.org/10.3390/inventions3030059
Chicago/Turabian StyleFaisal Haider, Mohammad, Asaad Migot, Md Yeasin Bhuiyan, and Victor Giurgiutiu. 2018. "Experimental Investigation of Impact Localization in Composite Plate Using Newly Developed Imaging Method" Inventions 3, no. 3: 59. https://doi.org/10.3390/inventions3030059