
Sandwiched Magnetic Coupler for Adjustable Gear Ratio

Abstract
:
1. Introduction
2. Materials and Methods
3. Results
3.1. Magnetic Moment of Inertia Derivation
- (1)
- The magnetic conductivity coefficient of iron rods and the ring is considered infinite ().
- (2)
- here is no flux leakage and fringing effect between iron rods, magnet and iron ring.
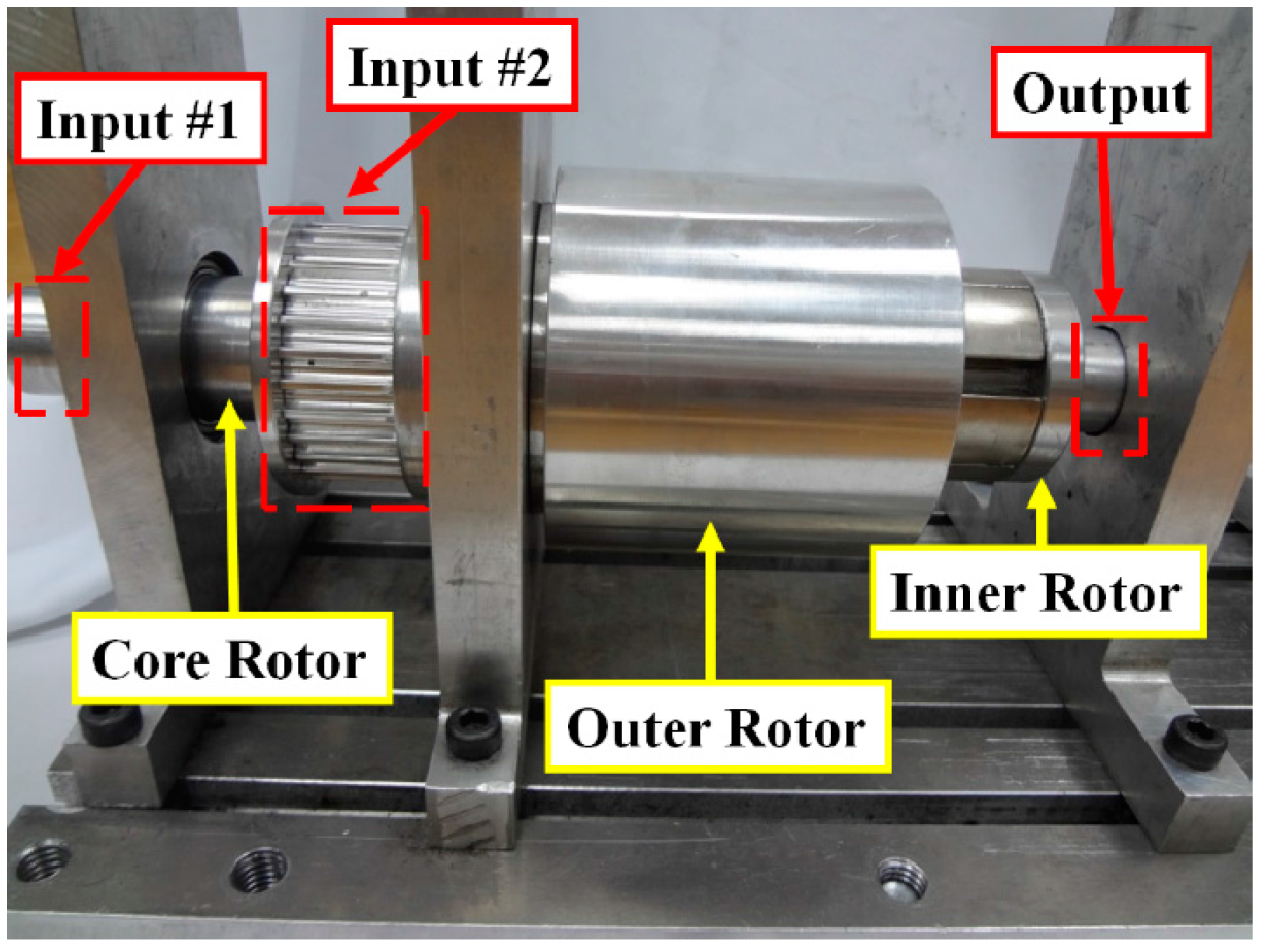
3.2. Dynamic Math Model of the Variable Speed Magnetic Coupling
4. Discussion
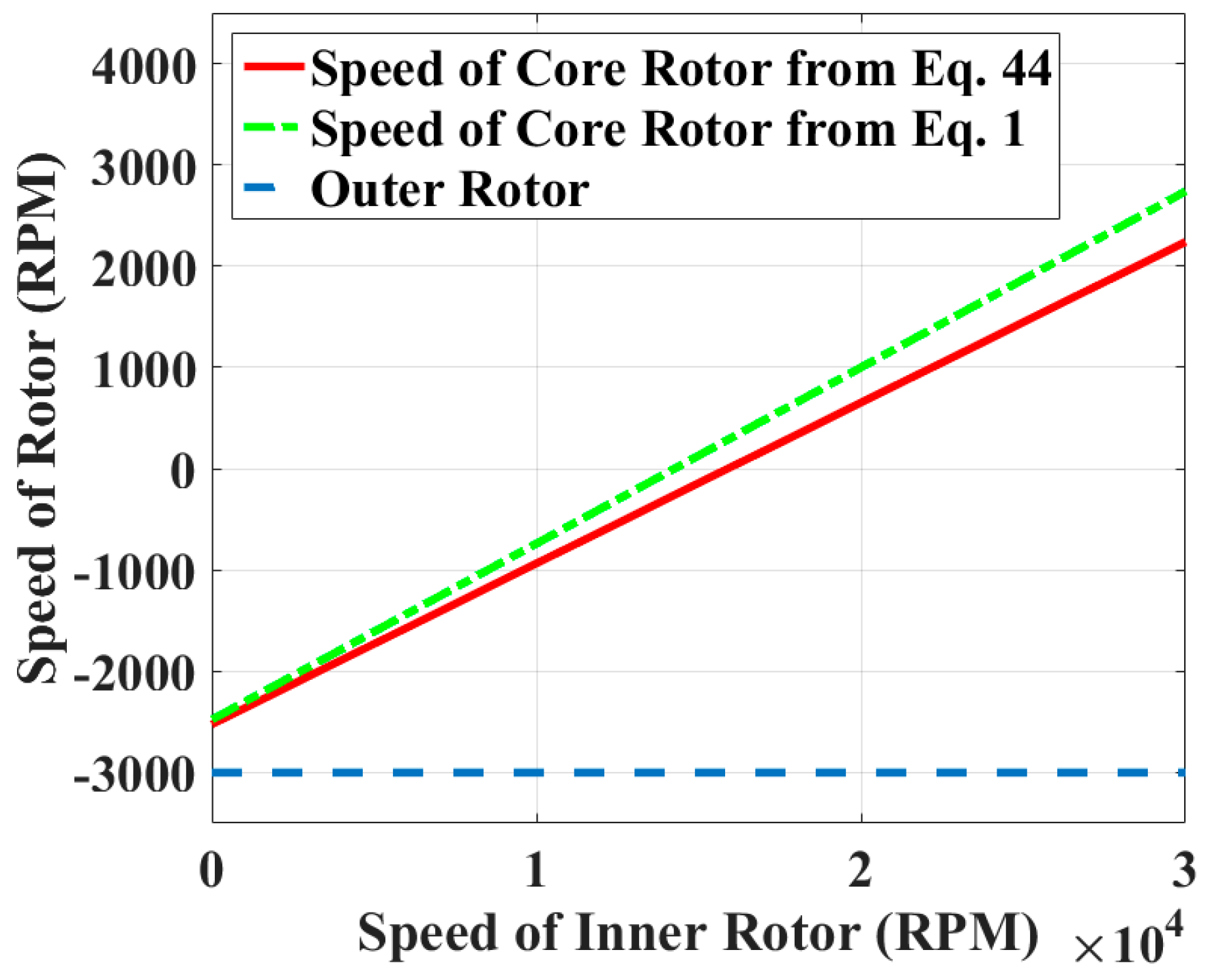
4.1. Verifying the Speed Ratio of the Variable Speed Magnetic Coupling
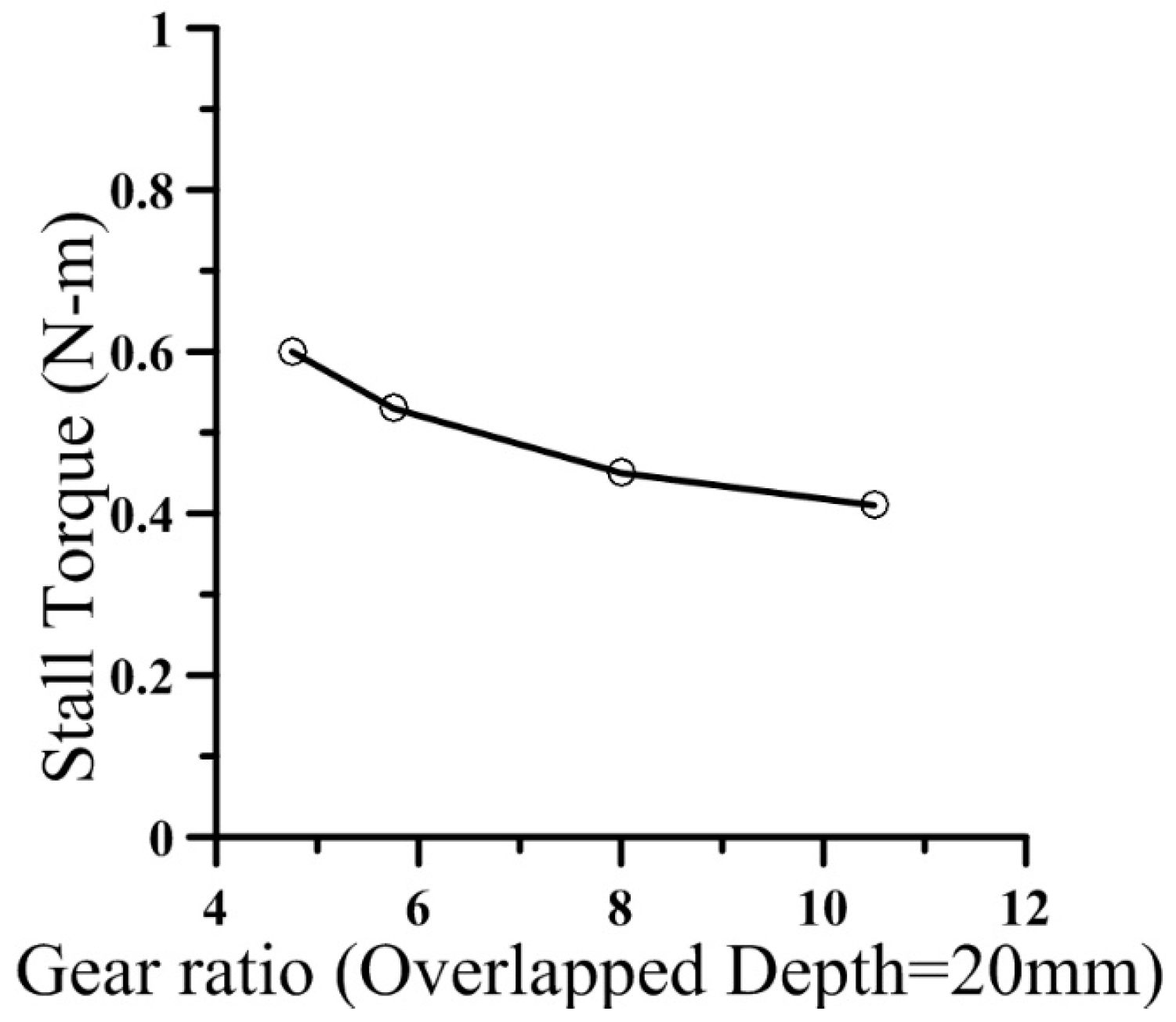
- (i)
- maximum speed ratio () at 10.5;
- (ii)
- speed of inner rotor is 4.75 times that of the outer one when the outer one serves as power input and the inner one as the output end and the core rotor is fixed;
- (iii)
- speed of inner rotor is 5.75 times that of the core when the core serves as power input and the inner one is the output end and the outer rotor is fixed.
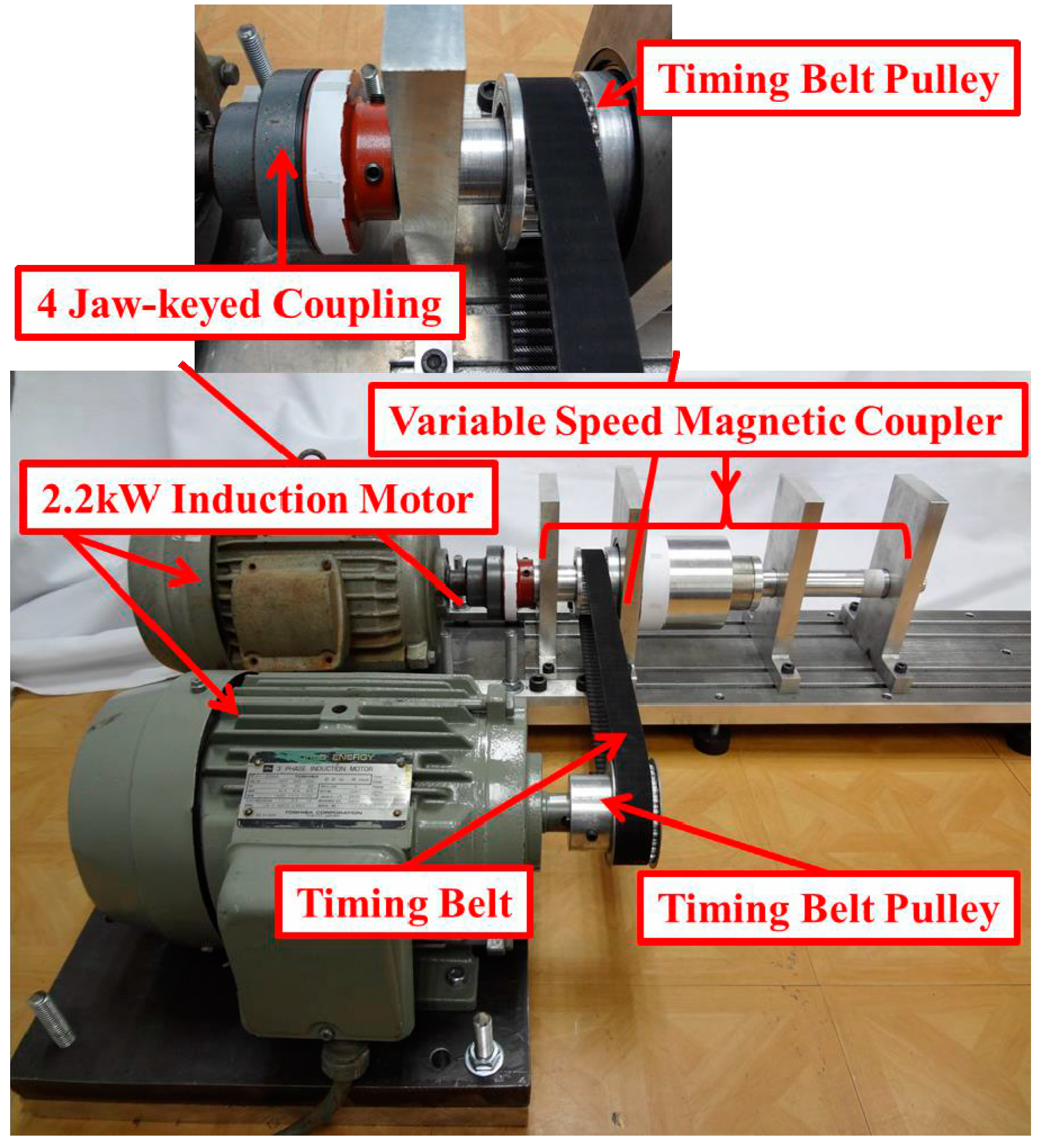
4.2. Speed Ratio Experiment of Variable Speed Magnetic Coupling
- (1)
- Outer rotor set to 300 rpm in counterclockwise direction;
- (2)
- Core rotor set to speed up slowly from 0 to 360 rpm in clockwise direction;
- (3)
- Outer rotor set to speed up to 420 rpm when the core reaches 360 rpm.
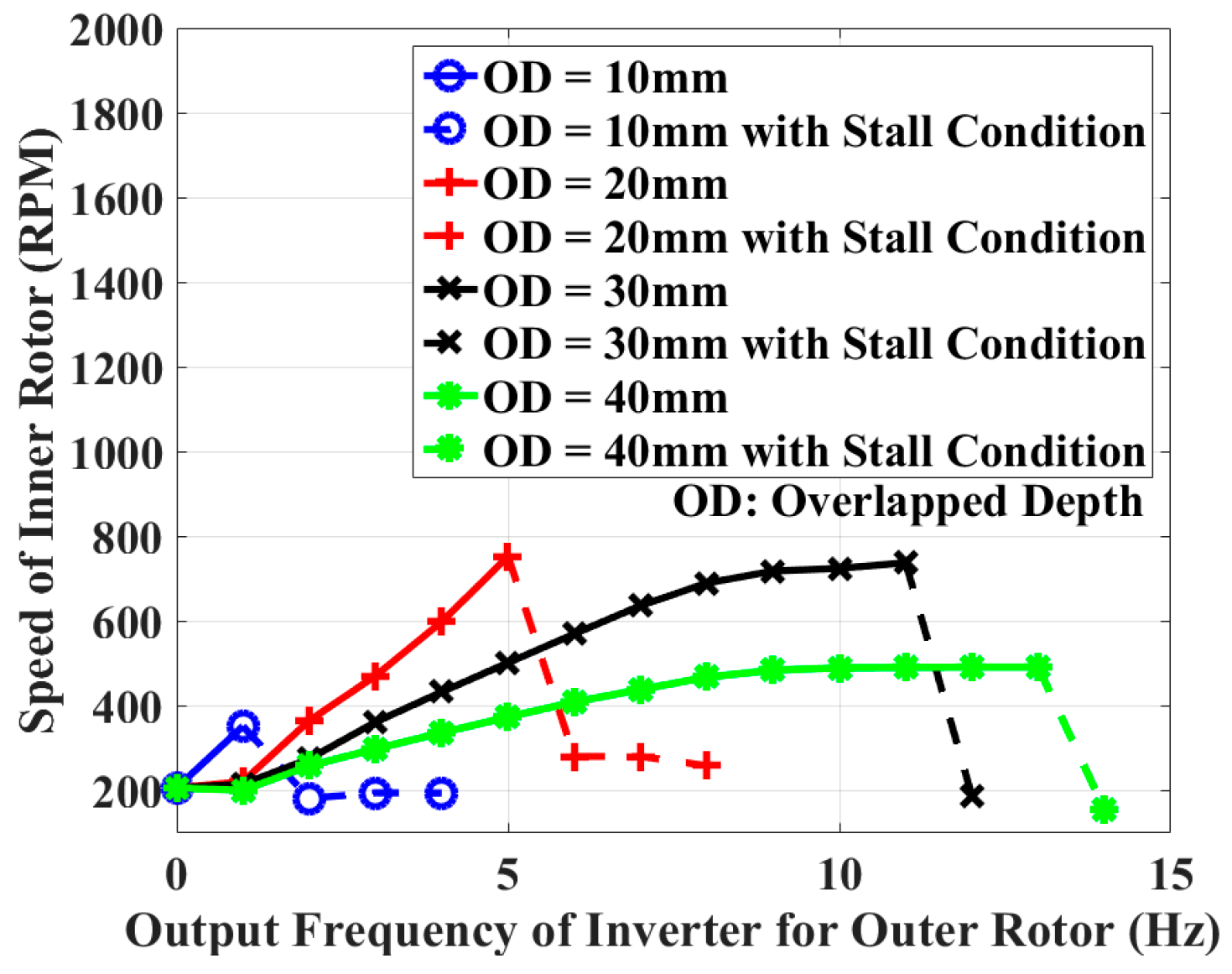
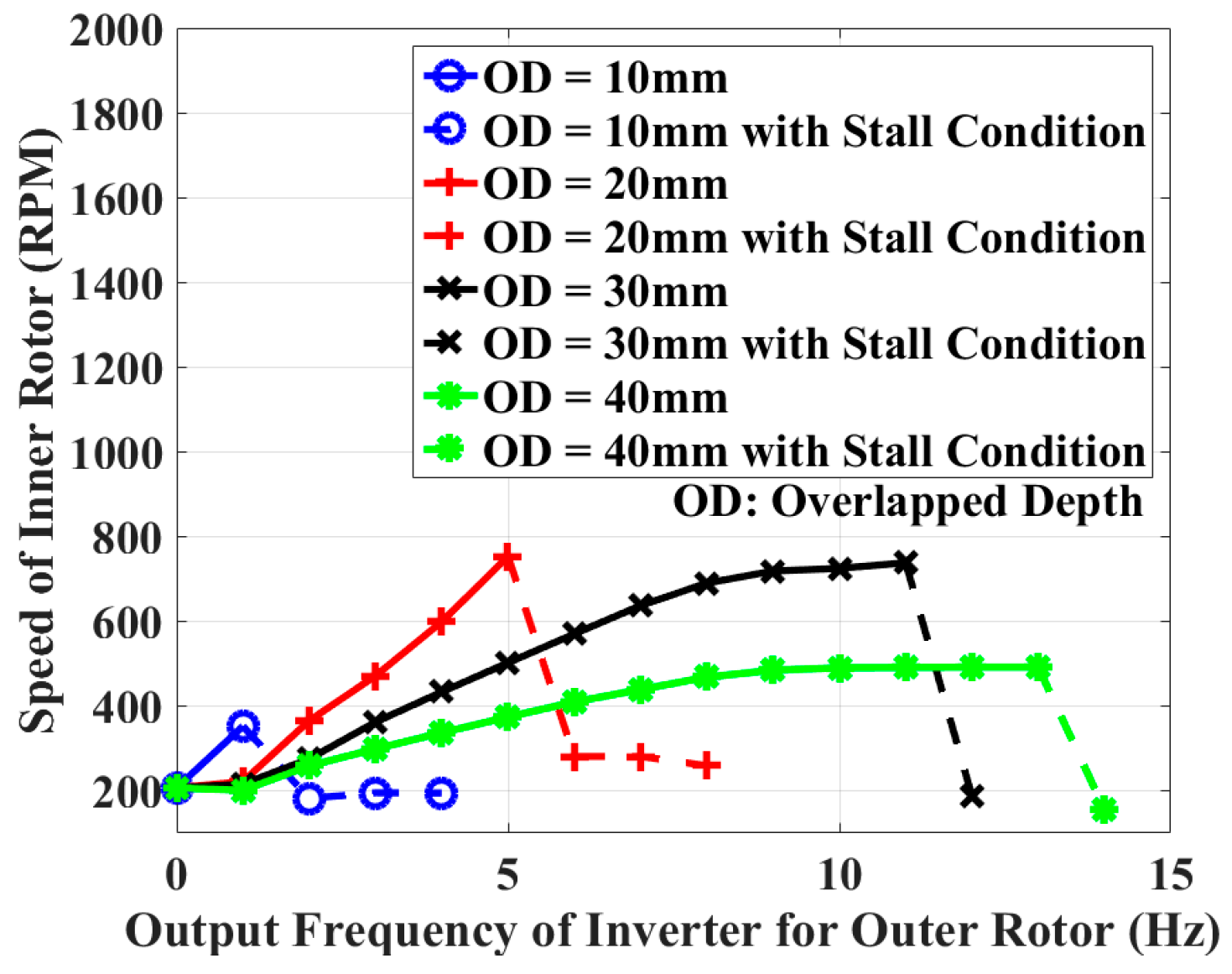
4.3. Stall Condition Experiment of Variable Speed Magnetic Coupling
- (1)
- Set core rotor speed to 420 rpm.
- (2)
- Keep core rotor speed constant and increment the outer rotor input frequency until stalling is encountered.
- (1)
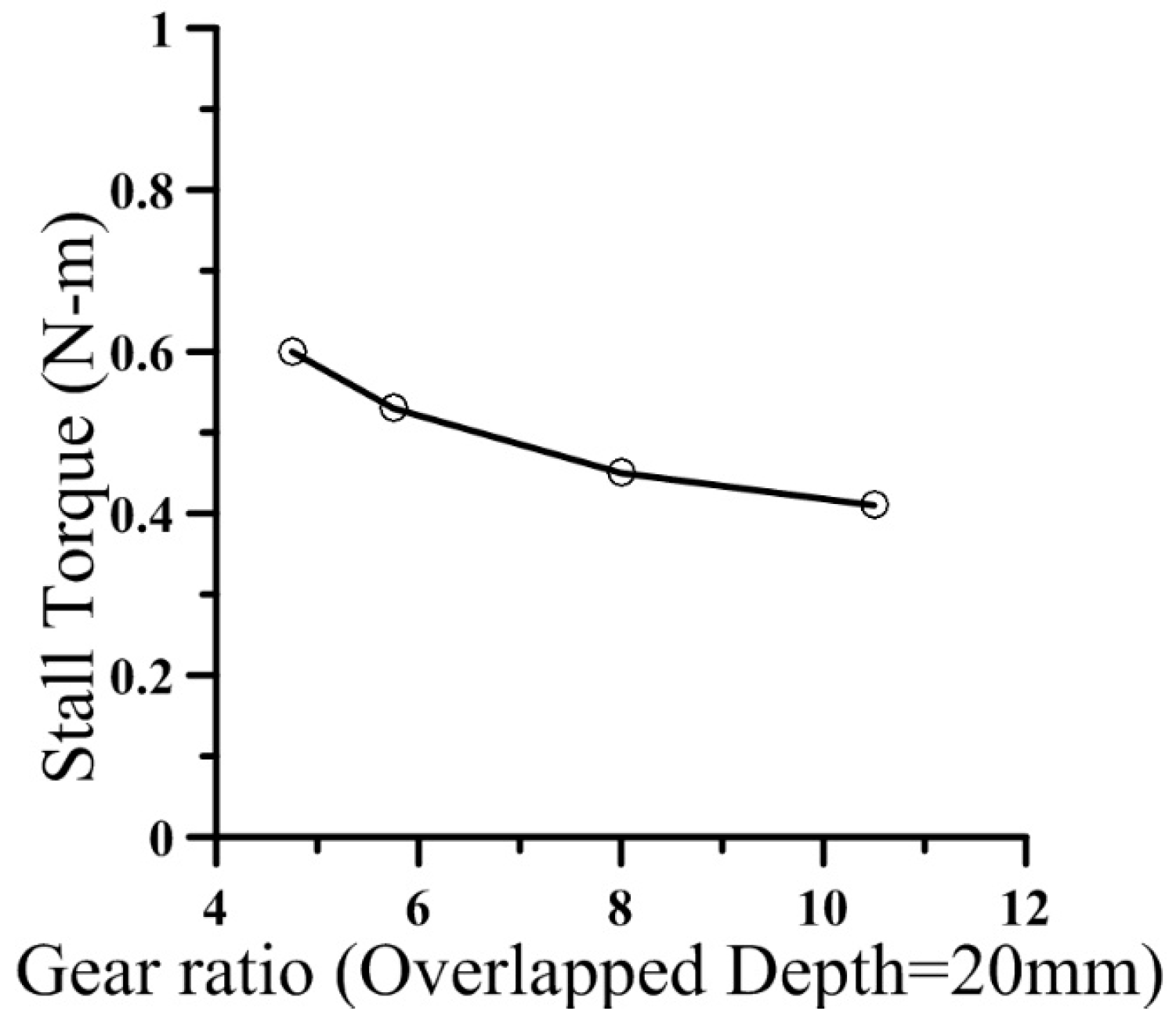
- The variable speed magnetic coupling presented here conforms with the initial target of maximum speed ratio () at 10.5 and its speed modulating function has been proved correct.
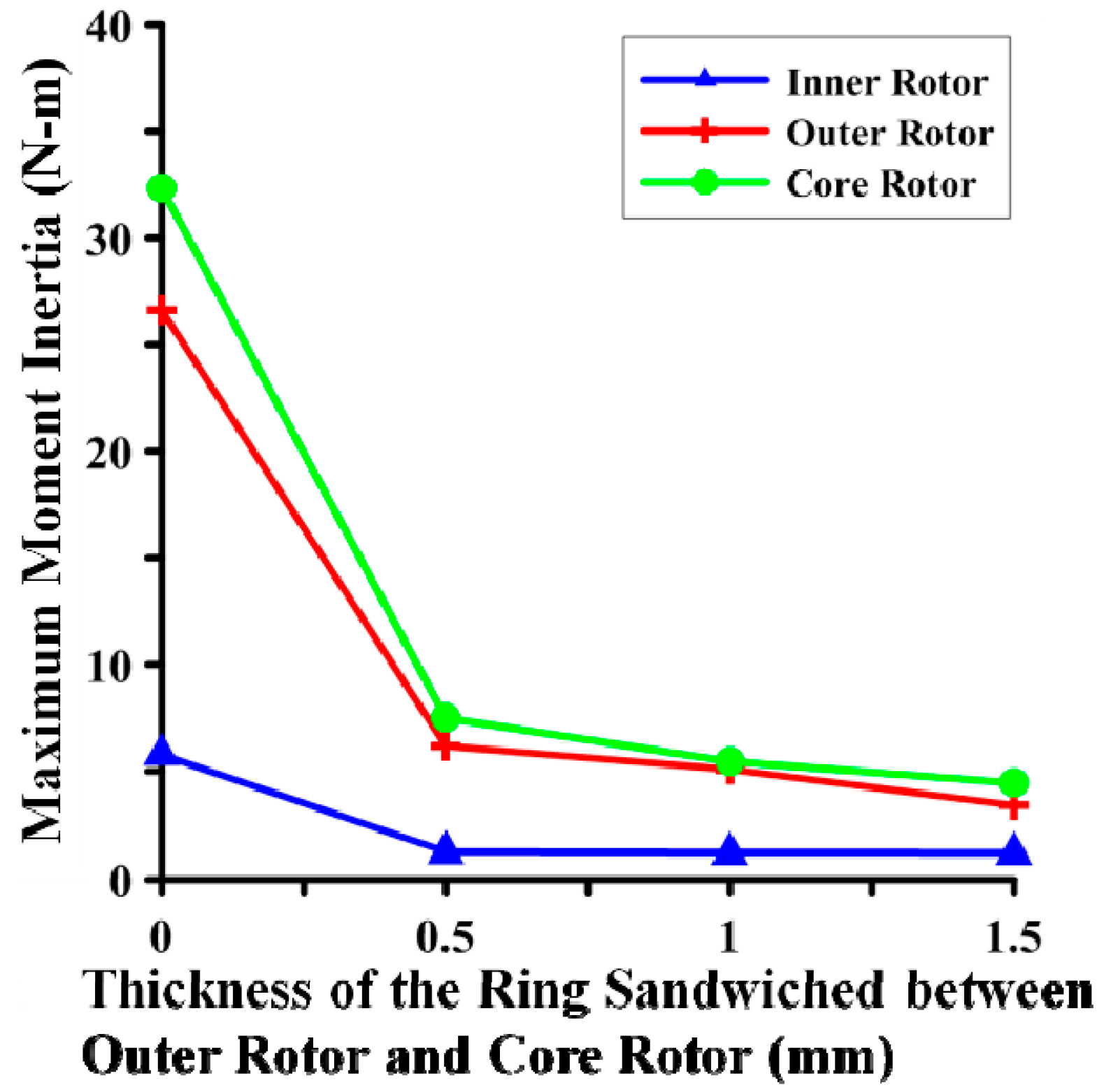
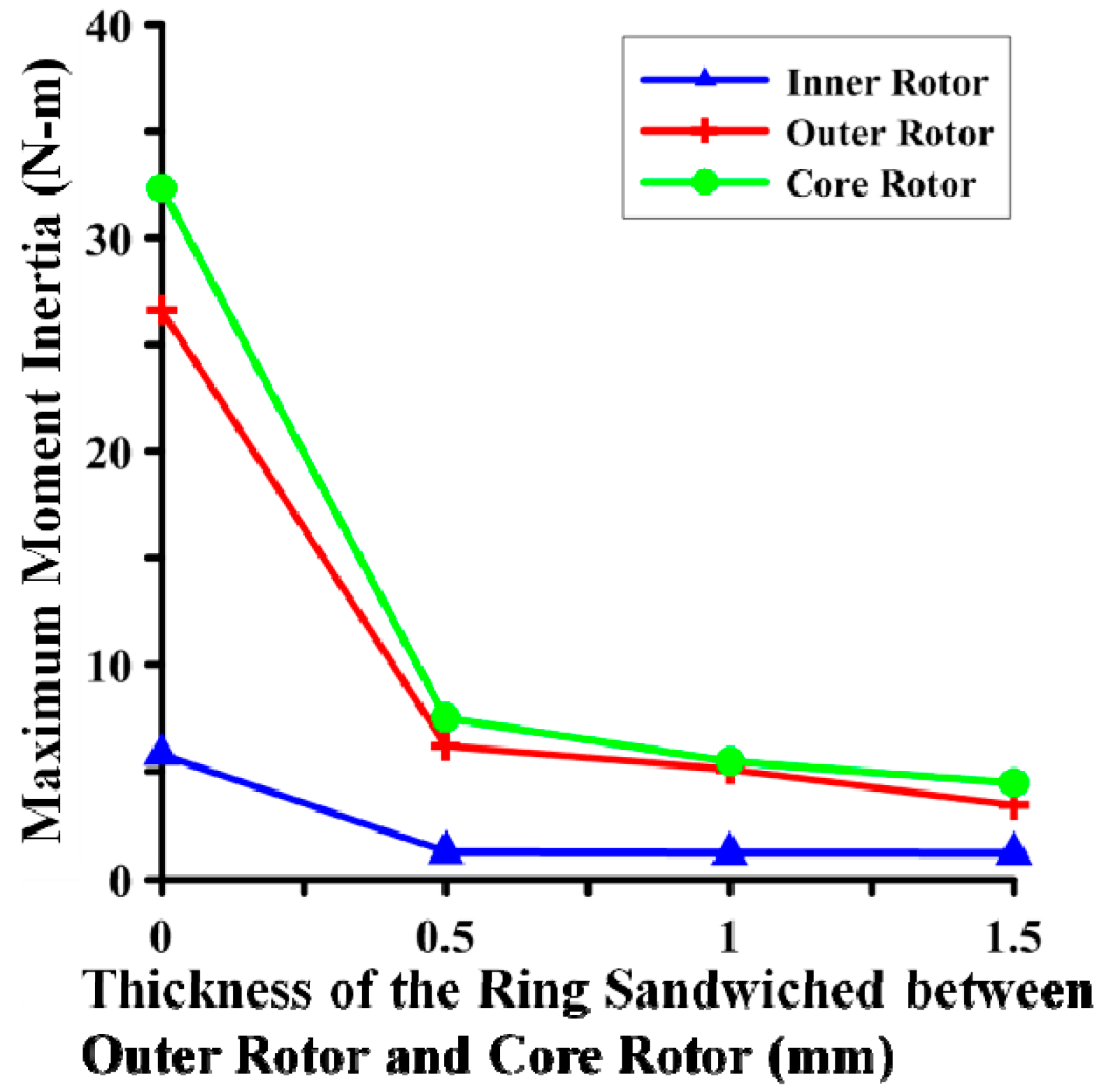
- (2)
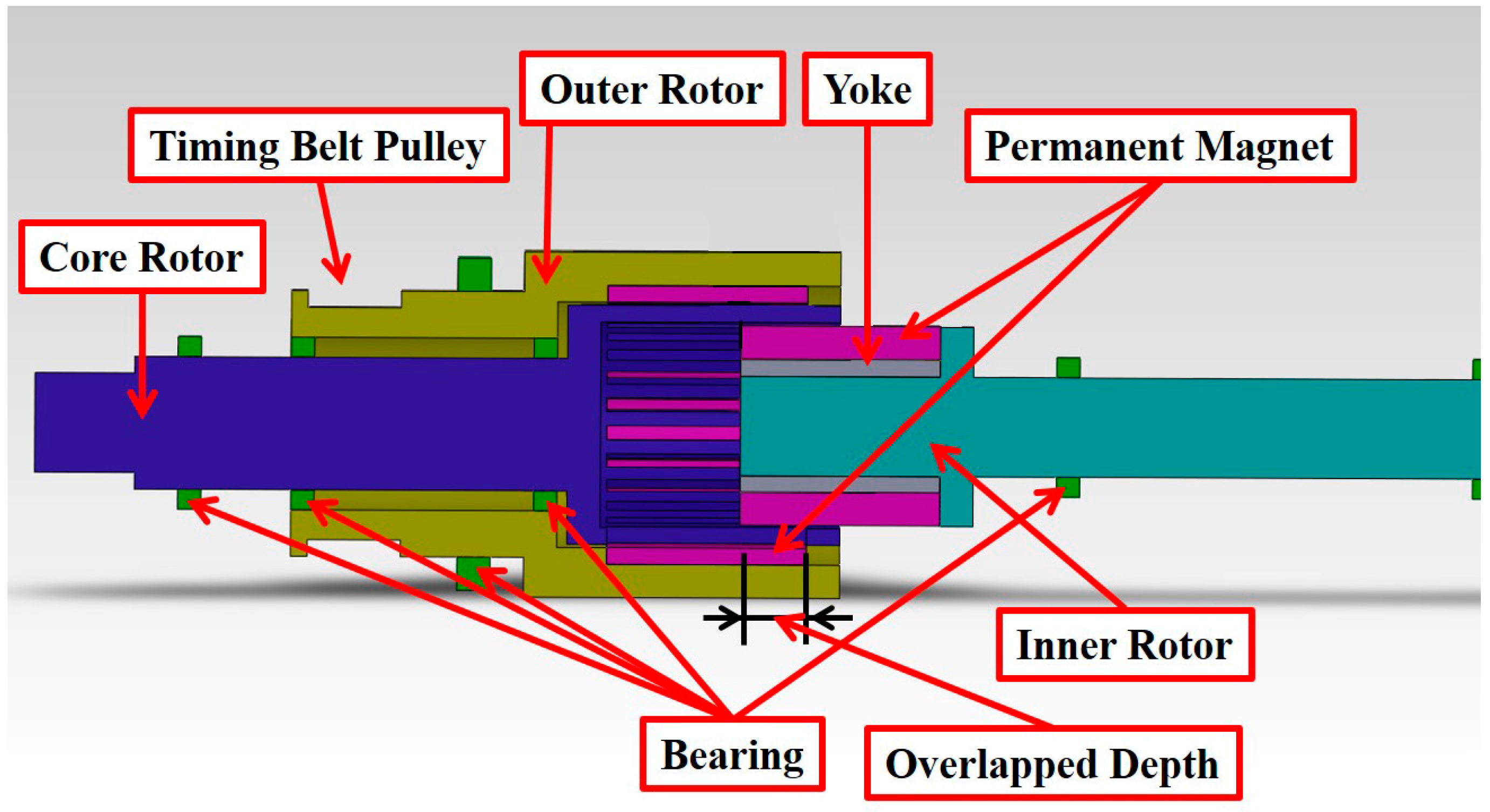
- A smaller overlap of the inner rotor reduces the magnetic moment of inertia in the air gap but increases the likelihood of stalling.
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Muruganandam, G.; Padma, S.; Slvakumar, P. Design and Implementation of a Novel Magnetic Bevel Gear. CEAI 2013, 15, 30–37. [Google Scholar]
- Rgensen, F.T.J.; Andersen, T.O.; Rasmussen, P.O. The Cycloid Permanent Magnetic Gear. IEEE Trans. Ind. Appl. 2008, 44, 1659–1665. [Google Scholar] [CrossRef]
- Atallah, K.; Howe, D. A novel high-performance magnetic gear. IEEE Trans. Magn. 2001, 37, 2844–2846. [Google Scholar] [CrossRef]
- Hesmondhalgh, D.E.; Tipping, D. A multi-element magnetic gear. IEEE Proc. B Electr. Power Appl. 1980, 127. [Google Scholar] [CrossRef]
- Tsurumoto, K.; Kikuchi, S. A new magnetic gear using permanent magnet. IEEE Trans. Magn. 1987, 23. [Google Scholar] [CrossRef]
- Ikuta, K.; Makita, S.; Arimoto, S. Non-contact magnetic gear for micro transmission mechanism. In Proceedings of the IEEE Conference on Micro electro mechanical systems, MEM’91, Nara, Japan, 2 January 1991; pp. 125–130.
- Atallah, K.; Calverley, S.D.; Howe, D. Design, Analysis and Realisation of a High-Performance Magnetic Gear. IEE Proc. Electr. Power Appl. 2004, 151, 135–143. [Google Scholar] [CrossRef]
- Rasmussen, P.O.; Andersen, T.O.; Rgensen, F.T.J.; Nielsen, O. Development of a High-Performance Magnetic Gear. IEEE Trans. Ind. Appl. 2005, 41, 764–770. [Google Scholar] [CrossRef]
- Brönn, L.; Wang, R.-J.; Kamper, M. Development of a Shutter Type Magnetic Gear. In Proceedings of the 19th Southern African Universities Power Engineering Conference SAUPEC 2010, University of the Witwatersrand, Johannesburg, South Africa, 28–29 January 2010.
- Shah, L.; Cruden, A.; Williams, B.W. A Variable Speed Magnetic Gear Box Using Contra-Rotating Input Shafts. IEEE Trans. Magn. 2011, 47, 431–438. [Google Scholar] [CrossRef]
- Atallah, K.; Wang, J.; Calverley, S.D.; Duggan, S. Design and Operation of a Magnetic Continuously Variable Transmission. IEEE Trans. Ind. Appl. 2012, 48, 1288–1295. [Google Scholar] [CrossRef]
- Frank, N.W.; Toliyat, H.A. Gearing Ratios of a Magnetic Gear for Wind Turbines. In Proceedings of the Electric Machines and Drives Conference, Miami, FL, USA, 3–6 May 2009; pp. 1224–1230.
- Abdel-Khalik, A.; Ahmed, S.; Massoud, A.; Elserougi, A. Magnetic Gearbox with an Electric Power Output Port and Fixed Speed Ratio for Wind Energy Applications. J. Energy Power Eng. 2013, 7, 1141–1149. [Google Scholar]
- Chau, K.; Zhang, D.; Jiang, J.; Liu, C.; Zhang, Y. Design of a Magnetic-Geared Outer-Rotor Permanent-Magnet Brushless Motor for Electric Vehicles. IEEE Trans. Magn. 2007, 43, 2504–2506. [Google Scholar] [CrossRef]
- Chau, K.-T.; Liu, C.-H. Electromagnetic Design of a New Electrically Controlled Magnetic Variable-Speed Gearing Machine. Energies 2014, 7, 1539–1554. [Google Scholar]
- Fan, Y.; Jiang, H.; Cheng, M.; Wang, Y. An Improved Magnetic-Geared Permanent Magnet in-Wheel Motor for Electric Vehicles. In Proceedings of the Vehicle Power and Propulsion Conference (VPPC), Lille, France, 1–3 September 2010.
- Jian, L.-N.; Shi, Y.-J.; Liu, C.; Xu, G.-Q.; Gong, Y.; Chan, C.-C. A Novel Dual-Permanent-Magnet-Excited Machine for Low-Speed Large-Torque Applications. IEEE Trans. Magn. 2013, 49, 2381–2384. [Google Scholar] [CrossRef]
- Zhu, Z.-Q.; Howe, D. Influence of Design Parameters on Cogging Torque in Permanent Magnet Machines. IEEE Trans. Energy Convers. 2000, 15, 407–412. [Google Scholar] [CrossRef]
- Jang, D.-K.; Chang, J.-H. Effect of Stationary Pole Pieces with Bridge on Electromagnetic and Mechanical Performance of a Coaxial Magnetic Gear. J. Magn. 2013, 18, 207–211. [Google Scholar] [CrossRef]
- Dajaku, G.; Gerling, D. Stator Slotting Effect on the Magnetic Field Distribution of Salient Pole Synchronous Permanent-Magnet Machines. IEEE Trans. Magn. 2010, 46, 3676–3683. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Options | |||||||
|---|---|---|---|---|---|---|---|
| A | 4 | 22 | 18 | 8 | 88 | 2 | 10 |
| B | 4 | 23 | 19 | 8 | 184 | 1 | 10.5 |
| C | 4 | 24 | 20 | 8 | 24 | 8 | 11 |
| D | 4 | 25 | 21 | 8 | 200 | 1 | 11.5 |
| Parameter | Symbol | Value |
|---|---|---|
| Radial Length of Ferrite Rods | 4 mm | |
| Radial Length of Air Gap | , | 1 mm |
| Radial Length of Outer-rotor Magnets | 5 mm | |
| Arc Width of Ferrite Rods on the Inner Side | 4.23 mm | |
| Arc Width of Outer-rotor Magnets on the Outer Side | 6.95 mm | |
| Thickness of Ring | 1 mm | |
| Radial Length of Inner-rotor Magnets | 10 mm | |
| Arc Width of Inner-rotor Magnets on the Inside | 15.7 mm | |
| Arc Width of Ring with the Same Arc Angle with Inner-rotor Magnets | 25.13 mm | |
| Relative Permeability of Ferrite Rods/Ring | 5000 | |
| Relative Permeability of Magnets | 1.05 | |
| Permeability of Vacuum | ||
| Coercive Force of N35 | 955 |
| Operation Mode | Gear Ratio | |||
|---|---|---|---|---|
| Rotational Speed | Rotational Speed | Rotational Speed | ||
| 1 | 48.83 RPM | −48.91 RPM | −511.32 RPM | 10.5 |
| 2 | 85.94 RPM | 0 RPM | −409.15 RPM | 4.75 |
| 3 | 0 RPM | −109.78 RPM | −630.24 RPM | 5.75 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Leong, F.-H.; Tsai, N.-C.; Chiu, H.-L. Sandwiched Magnetic Coupler for Adjustable Gear Ratio. Inventions 2016, 1, 18. https://doi.org/10.3390/inventions1030018
Leong F-H, Tsai N-C, Chiu H-L. Sandwiched Magnetic Coupler for Adjustable Gear Ratio. Inventions. 2016; 1(3):18. https://doi.org/10.3390/inventions1030018
Chicago/Turabian StyleLeong, Foo-Hong, Nan-Chyuan Tsai, and Hsin-Lin Chiu. 2016. "Sandwiched Magnetic Coupler for Adjustable Gear Ratio" Inventions 1, no. 3: 18. https://doi.org/10.3390/inventions1030018
APA StyleLeong, F.-H., Tsai, N.-C., & Chiu, H.-L. (2016). Sandwiched Magnetic Coupler for Adjustable Gear Ratio. Inventions, 1(3), 18. https://doi.org/10.3390/inventions1030018