1. Introduction
Over the past decades, considerable effort has been put towards the study of object position evaluation by computer visual information. Various approaches and techniques have been developed throughout manifold applications, including both applications and theories. Some used more than one camera so as to establish the position information of an object [
1,
2,
3,
4]. Rankin et al. addressed a stereo vision-based terrain mapping method for the off-road autonomous navigation of an unmanned ground vehicle (UGV) [
1]. Chiang et al. developed a stereo vision 3D position measurement system for a three-axial pneumatic parallel mechanism robot arm [
2]. Richa et al. presented an efficient approach for heart surgery by using stereo images from a calibrated stereo endoscope in medical application [
3]. Luna et al. have studied a sensor system to measure the 2-D position of an object that intercepts a plane in space [
5]. However, it may be laden to equip with two or more cameras in some applications. For instance, Zhou presented an approach to geo-locate the ground-based object from video stream by a single camera equipped in an unmanned aerial vehicle (UAV) [
6]. The measuring system from the vision information may not be one of the main functions in some applications, but the system can provide more advantageous functions for those applications without implementing any extra hardware or device.
Camera calibration of is one of the crucial issues in computer vision. Camera parameters which require calibration include intrinsic and extrinsic ones [
7]. The internal camera geometric and optical characteristics are intrinsic, while the 3D position and orientation of the camera frame relative to a certain world coordinate system are extrinsic. The intrinsic parameters of a camera are sometimes fixed, such as mounted orientation and position, distortion, CCD chip position, chip cell distance, etc. Although not all the techniques need any calibration object, the calibration of a camera is indispensable for some techniques of computer vision applications [
8,
9,
10,
11].
A sensor system which evaluates the positions of objects by visual information with a single CCD camera is presented. Some techniques of this proposed approach were adopted from the invention patented in Taiwan [
12]. It utilizes the properties of the CCD array in a camera in order to measure the positions of objects that are on regular geometric lines, curves, or surfaces. This paper not only adopts the approach to solve the lane detection problems, but provides the evaluation procedure and discusses its errors. The technique in this study may not have to utilize any calibration object and can be regarded as self-calibration, or the so-called 0D approach [
13]. The intrinsic parameters of the camera need to be obtained. This will result in a mathematical problem if all intrinsic parameters are evaluated by an image taken from the camera, although no calibration objects are necessary. An overview of this area can be found in [
14] and the references therein. For example, the distortion calibration must be considered for most cameras. The distortion parameters—which are the intrinsic parameters of a camera—are constant for all pixels in an image taken by this camera [
9]. This paper takes into account the radial distortion, since the radial distortion contributes the major errors to the distortions of the camera in this study. This paper details the mathematical model of the camera system in regard to the coordinate transformation between a fixed coordinate and a CCD chip coordinate. It also constructs the computational procedure for the object positioning system.
The notations in this paper are as follows: [.] denotes a matrix;
denotes the position vector of point
P, while
denotes the origin position vector of
A-coordinate;
denotes the
x,
y, and
z components of a position vector in
A coordinate, that is,
where the unit vectors
,
, and
are the orthogonal bases of
A coordinate in
x,
y, and
z axes, respectively. Hereafter in this paper, the position vector is in the fixed coordinate as the symbol
A is omitted. It is intuitive that a vector
can be represented both in
A coordinate and
B coordinate. That is,
or
2. Coordinate Transformation
A spatial object can map on the corresponding chip cell of the CCD array, or the pixel in an image taken by a camera. From the pinhole phenomenon, the object—the mapped pixel on the CCD array—and the lens center should be collinear after calibration for the camera distortion. The mapped pixel on the CCD array and the lens center can formulate the line equation in algebra intuitively, and the other one can satisfy the line equation as long as their position vectors are represented in the same coordinate system. In general, we can use the fixed coordinate to represent these position vectors. Therefore, the coordinate transformation from the CCD array coordinate (or the film chip coordinate) to the fixed coordinate is significant by this approach.
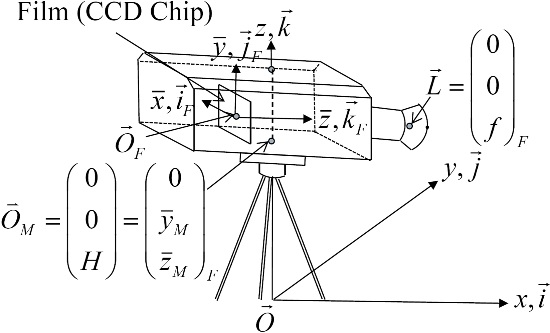
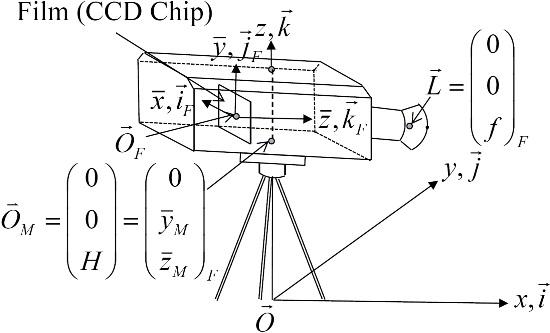
Figure 1 shows the relations between the fixed coordinate and the film chip coordinate, where
and
are the origins of the fixed coordinate and the film chip (CCD array) coordinate, respectively. For convenience, as shown in
Figure 1, we can assign the orientations of the
-axis and the
-axis in the film chip coordinate to conform to the pixel orientations of the
x-axis and
y-axis in an image. Let
and
denote any position represented in the fixed coordinate and in the film chip coordinate, respectively; i.e.,
According to the definitions,
and
then,
In general,
and
. That is, the positions of objects can refer to the position of the camera.
can also be represented in fixed coordinate; i.e.,
. In
Figure 1, the mounted position for the camera,
, where
and
can be obtained from the specifications of the camera.
can be assigned just above the origin of the fixed coordinate with zero
x-axis and zero
y-axis components.
has only the
z component in the fixed coordinate, or
, where
H is the height of
and
H can be measured directly. According to (7),
The origin of the film chip coordinate represented in the fixed coordinate can be
where
and
,
, and
denote the Euler angles of the camera for the yaw, pitch, and roll angles, respectively. Consequently, the coordinate transformation from the film chip coordinate to the fixed coordinate defined in (4) can become
In
Figure 1, let
be the lens center position where
Substituting (13) into (12), the lens center position in the fixed coordinate becomes
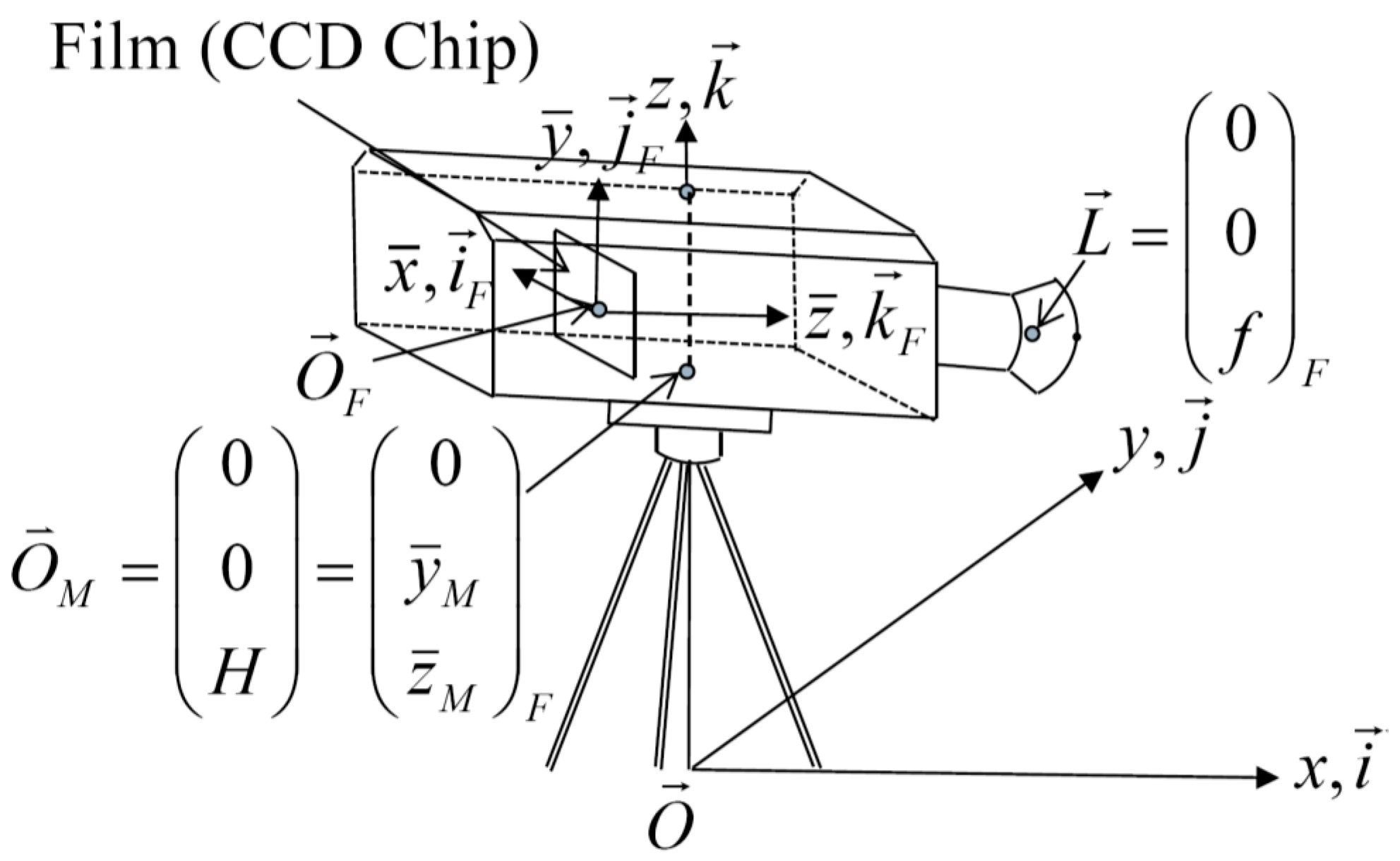
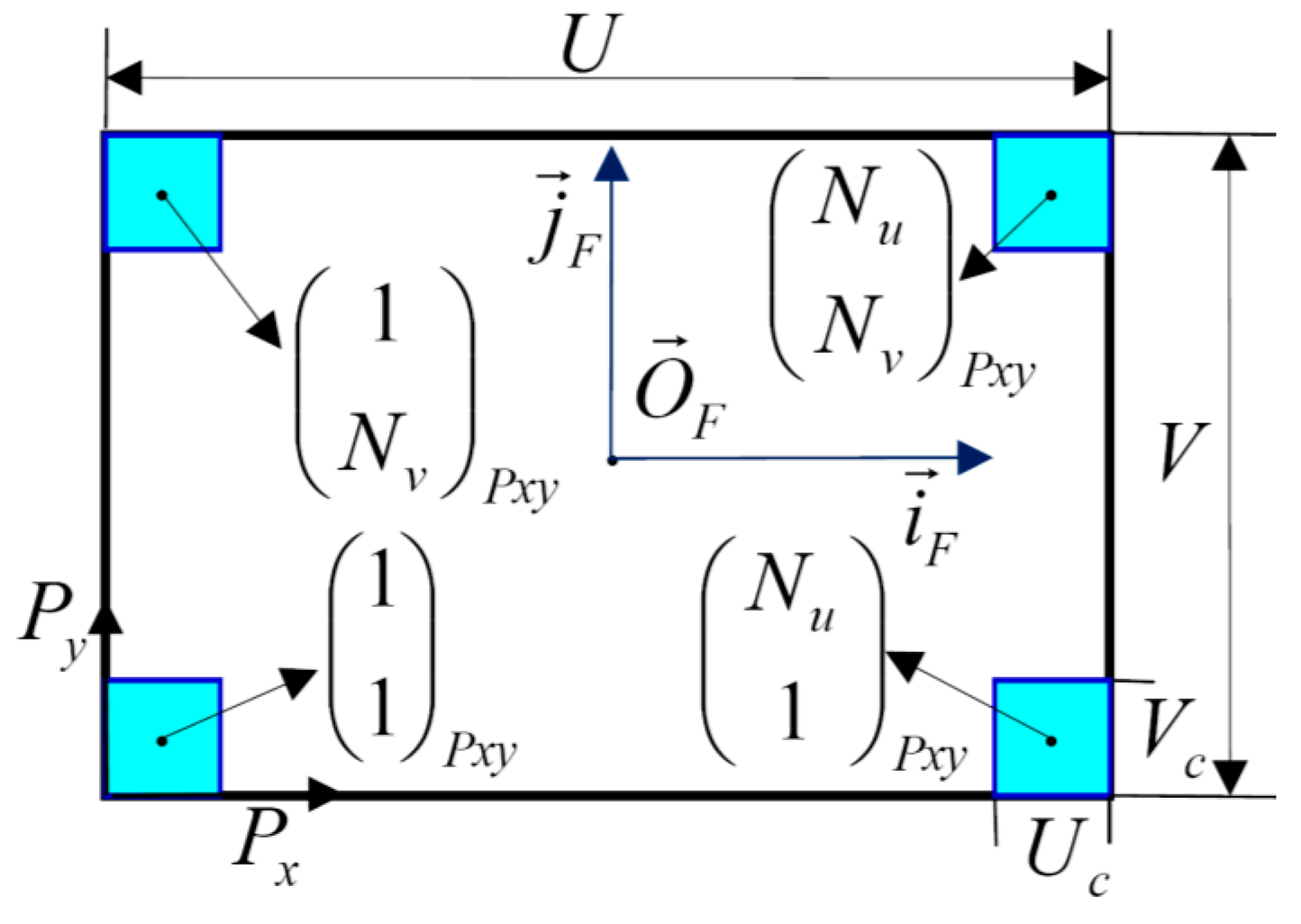
The CCD array, or the film chip of a camera, consists of the CCD cells which sense the light energy to make an image collected by the corresponding pixels.
Figure 2 sketches the configuration of the CCD array, where
U is the width of the CCD array,
V is the height of the CCD array,
is the width of the CCD cell,
is the height of the CCD cell, and
and
are the numbers of the CCD cells on the film chip in the width and height directions, respectively. Let
in which
and
denote the index of the CCD cells on the chip.
is indeed the same as the pixel index of the image. Let
stand for the position vector at the center of the chip cell for a pixel indexed by
and
in the image. Then, the chip cell center position can be as follows.
Substituting (15) into (12), the position at the center of the chip cell in the fixed coordinate in terms of the pixel index of the image becomes
This section has derived the positions of some significant points represented in the fixed coordinate from the film chip coordinate by the appropriate coordinate transformation in (12). According to (16), it can be intuitive to obtain the chip cell center position indexed by , which is also the pixel index of the image. Based on the pinhole model of a camera, an object from the scene mapped onto the CCD array, or the image, can be formulated as a line equation that makes two equations in three-dimensional (3D) space. In addition, the object in the scene, the lens center, and the center position vector of the corresponding chip cell mapped from the object must be collinear. If there are n objects, there should be n lines, or 2n equations. In the case that a set of the evaluated objects is on a regular curve (e.g., a line, a circle, etc.), n objects will increase n + 2 unknowns, including two regular curve parameters. Theoretically, the position evaluations for the objects are feasible since the equations increased are more than the unknowns increased. The Euler angles of the camera are not intrinsic parameters. They are sometimes fixed for images taken by the same camera in applications. However, the Euler angles will make the position evaluations inaccurate for a slight misalignment of the attitude for a camera.
3. The Evaluations of Camera Parameters and Object Positions
To exemplify the proposed approach, this paper assumes a case wherein the evaluated objects in the scene are collinear on the ground. According to the pinhole phenomenon, a point
of the objects which are collinear with the equation
on the ground (
z = 0) maps on the CCD chip cell at a pixel indexed by
. Therefore, points collinear on
satisfy the line equation as follows.
or
where
,
,
,
,
, and
are defined in (14) and (15). If a set of points
in a fixed coordinate maps onto a set of pixels
in the image, or the CCD array, where
, there will be 2
n equations according to (18) and (19). In this evaluation approach,
,
,
, and
H are the fixed variables for an image, while the line parameters
m and
are also fixed, but only
is a variable. One pixel information in an image produces two equations and one variable. Therefore, as for the objects on a regular curve, there should be at least
pixel information in an image to solve the additional
variables and
fixed variables theoretically. In
Figure 1,
,
, and the CCD geometry are known. If there is more than
pixel information, the evaluations of camera parameters and positions of objects can apply the least square approach from the quadratic performance index. That is, if there are
(
) pixel information on the
j-th line (i.e.,
and
are both constants for any
j = 1, 2, ...,
, where
denotes the number of regular lines), the least square approach can be defined as
, where
J is the quadratic performance index and
The optimal evaluated values of the unknown variables, including fixed and additional ones, can be obtained if J is minimized. The solution of minimization in (20) might not converge to a unique one by numerical methods or mathematical algorithms. The solution highly depends on the initial guess values of the variables. There are two ways to improve the solution accuracy of (20) in calculations. One is to increase the number of objects on the same line. The other is to choose more accurate initial guess values of the variables.
Figure 3 shows an evaluation system with a DH-HV2003UC camera, while this paper uses the 3DM-GX1 gyro mounted on the camera in order to measure the exact attitude, or the Euler angles, of the camera. Regarding the verification purpose of this proposed approach, this paper compares the exact attitudes with the evaluated ones. It additionally utilizes a laser distance meter to measure the height more precisely from the ground (platform) to the mounted position of the camera on its stand. According to the specifications of this camera, the CCD chip parameters are as follows.
,
,
,
,
,
,
, and
. These parameters are crucial to the evaluation of the positions of objects by the proposed approach, since they play the key role in the accuracy of the position evaluation approach. As for the camera distortion calibrations, this paper only takes into account the radial distortion of the camera, rather than other types of distortions in this application, such as the decentering distortion, the thin prism distortion, etc. Based on the images taken by the camera, the radial distortion of this camera is of the barrel type, with a negative distortion constant equal to −8.3042 × 10
−7 in pixels.
The position evaluation of the lane marks is a practical example, for instance, of the lane departure warning system of vehicles [
15,
16,
17].
Figure 4 shows the downscaled simulation scenario for the position evaluation of the lane marks, while the geometry of the platform is also illustrated in
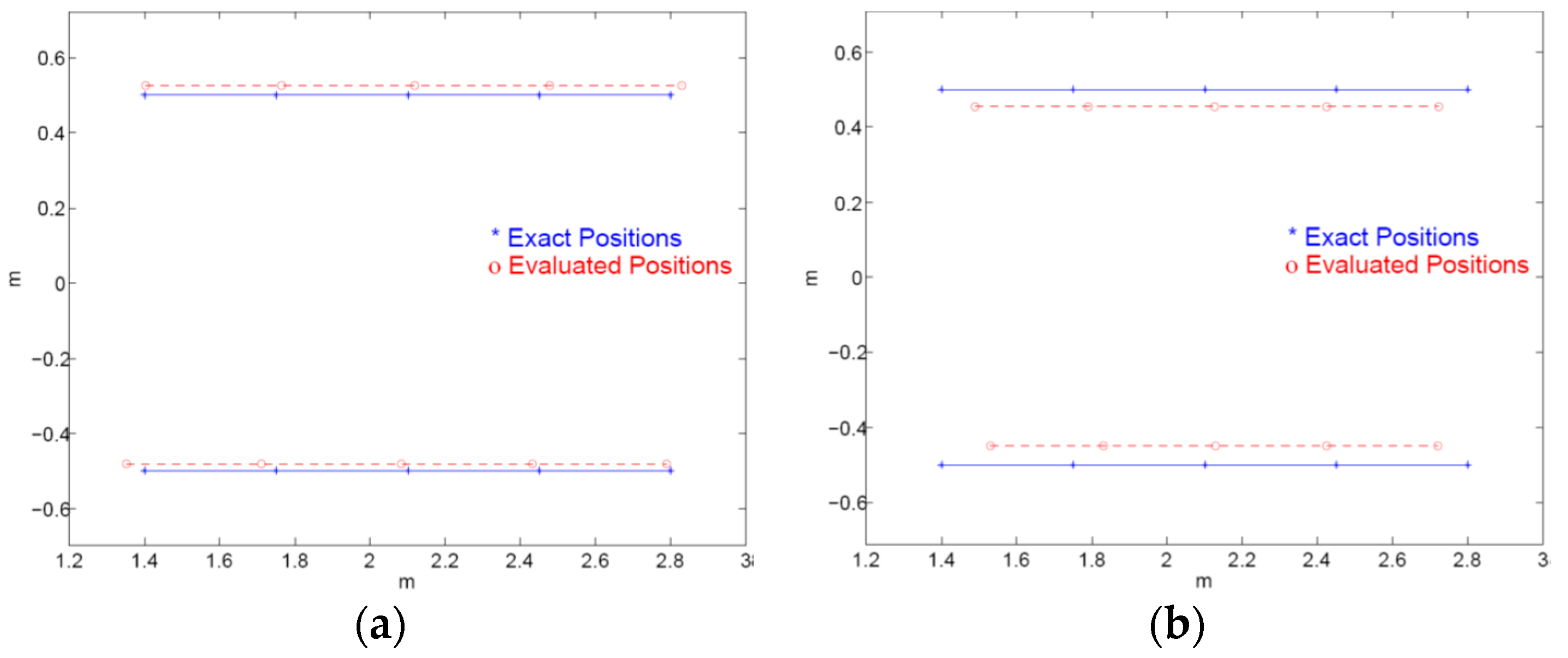
Figure 4b. In this example,
. There are four cases used to verify the feasibility of the proposed approach. They are the conditions as follows: (a)
,
,
; (b)
,
,
; (c)
,
,
; (d)
,
,
, respectively. The nonzero Euler angles simulate the situations in which the position evaluations of the landmarks are on the road if there are misalignments for the attitudes of the camera equipped in a vehicle.
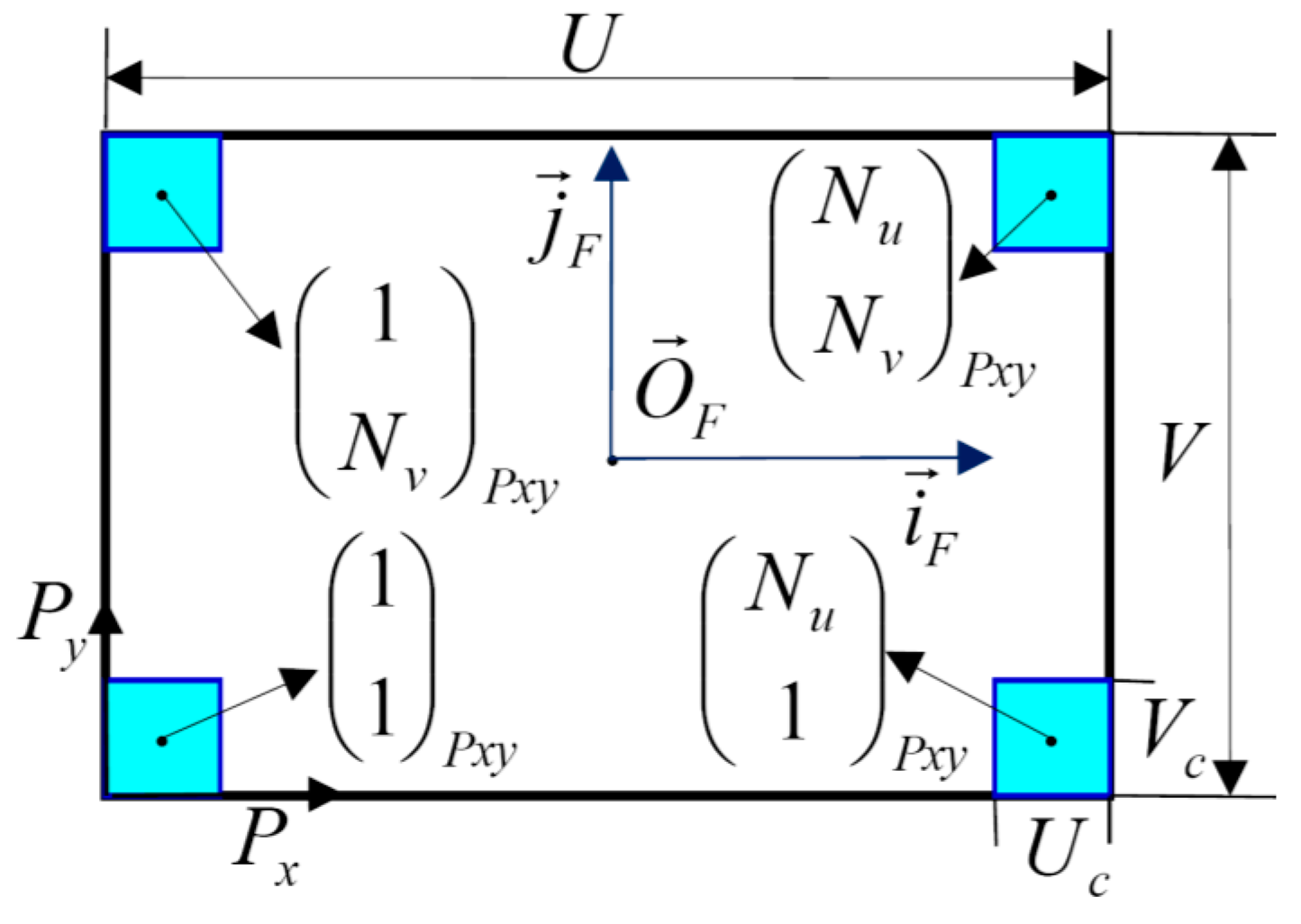
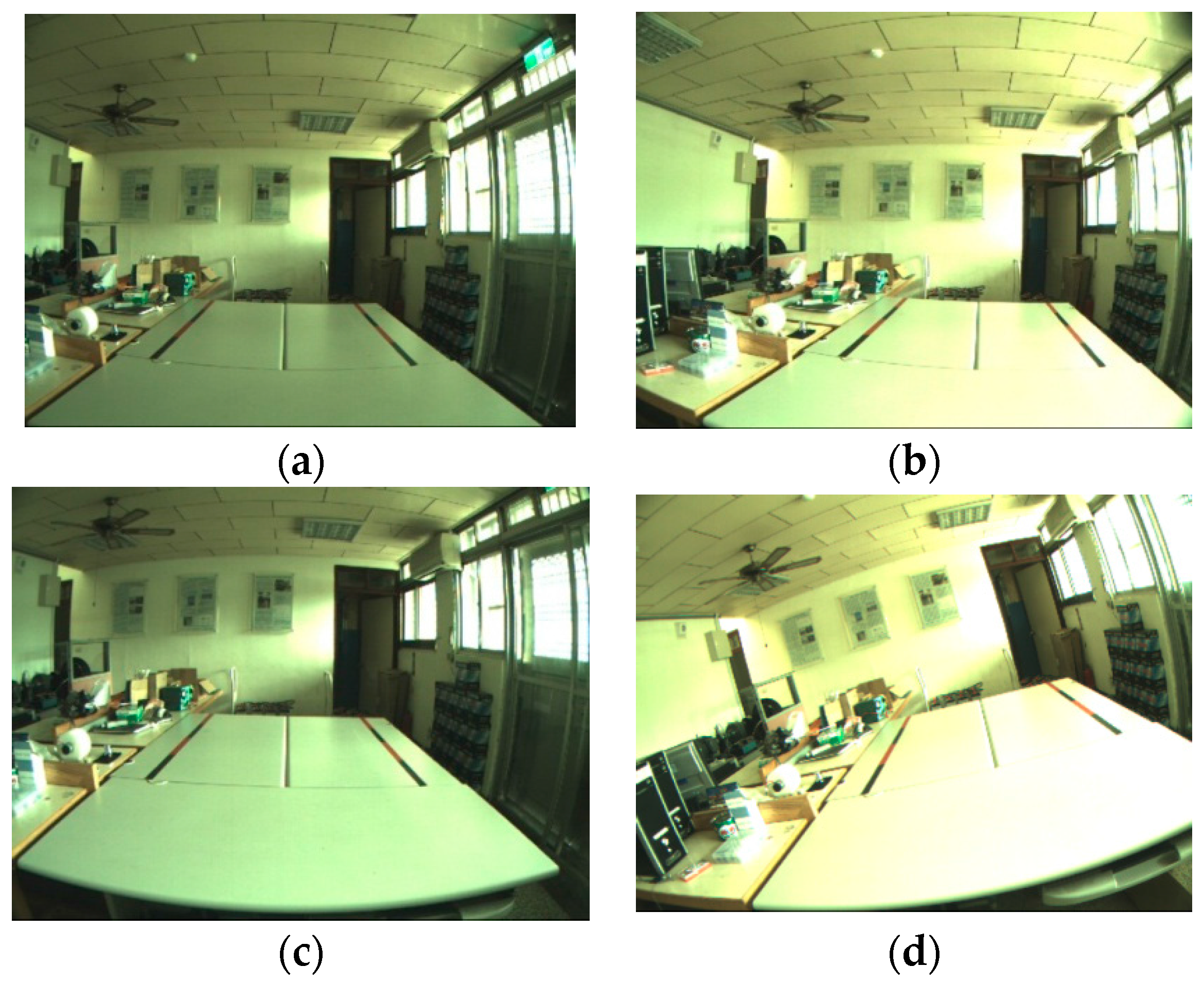
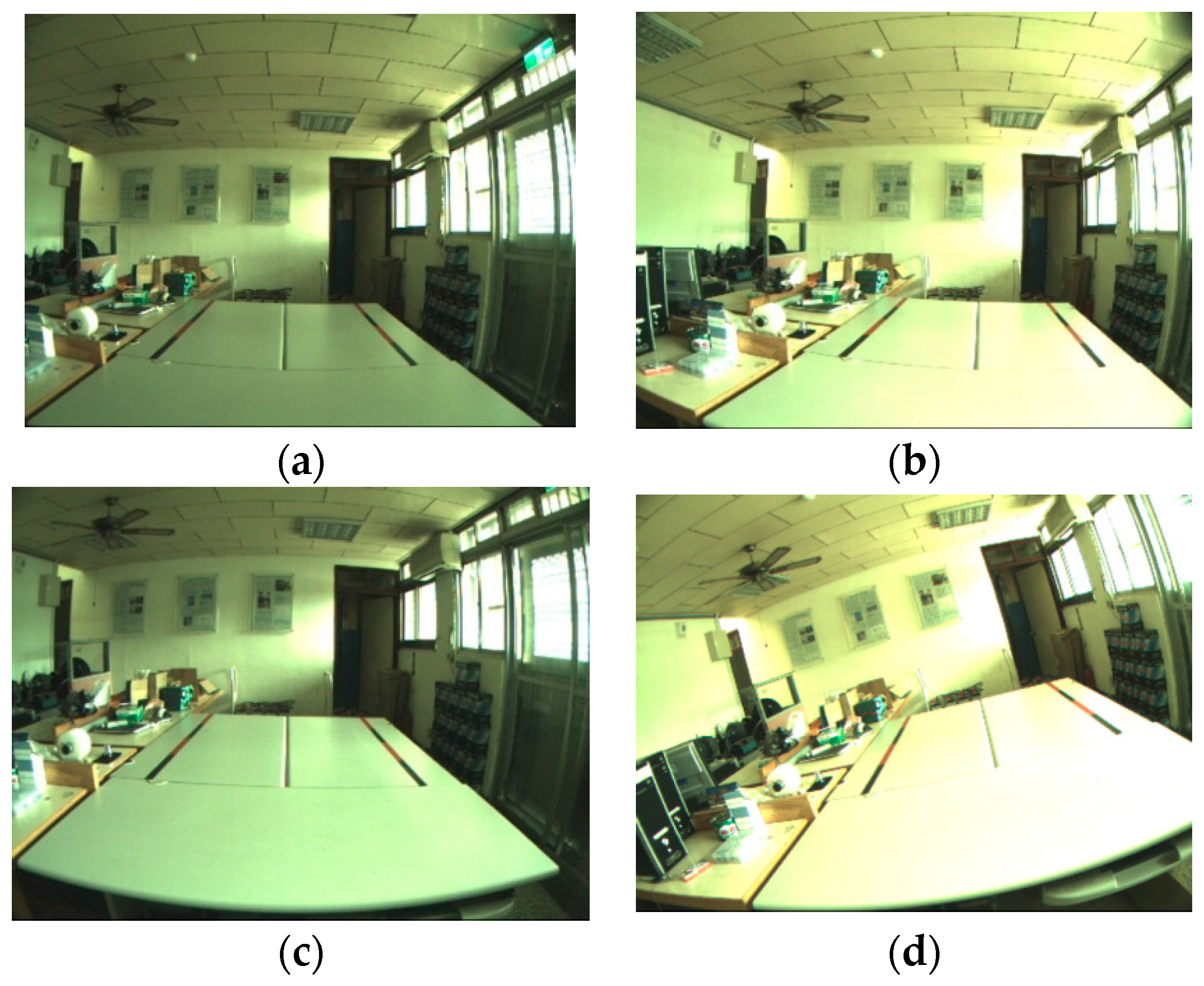
Figure 5 shows the pictures taken by the camera for these four different cases. We can pick out the specified points as in
Figure 4b with their corresponding pixel indices in the pictures after some adequate image processes.
Table 1 lists the values of the corresponding pixel index, or
and
values, of the assigned lane marks in these four different pictures. The axes defined in the pixel coordinate conform to those defined in images. For instance, the definitions of
y-axes in these different coordinates coincide with each other but in opposite directions in real space, because of the pinhole effect. Therefore, the directions of the
x-axis and
y-axis are, respectively, rightward and downward in pictures conventionally, but rightward and upward in film coordinate with front view.
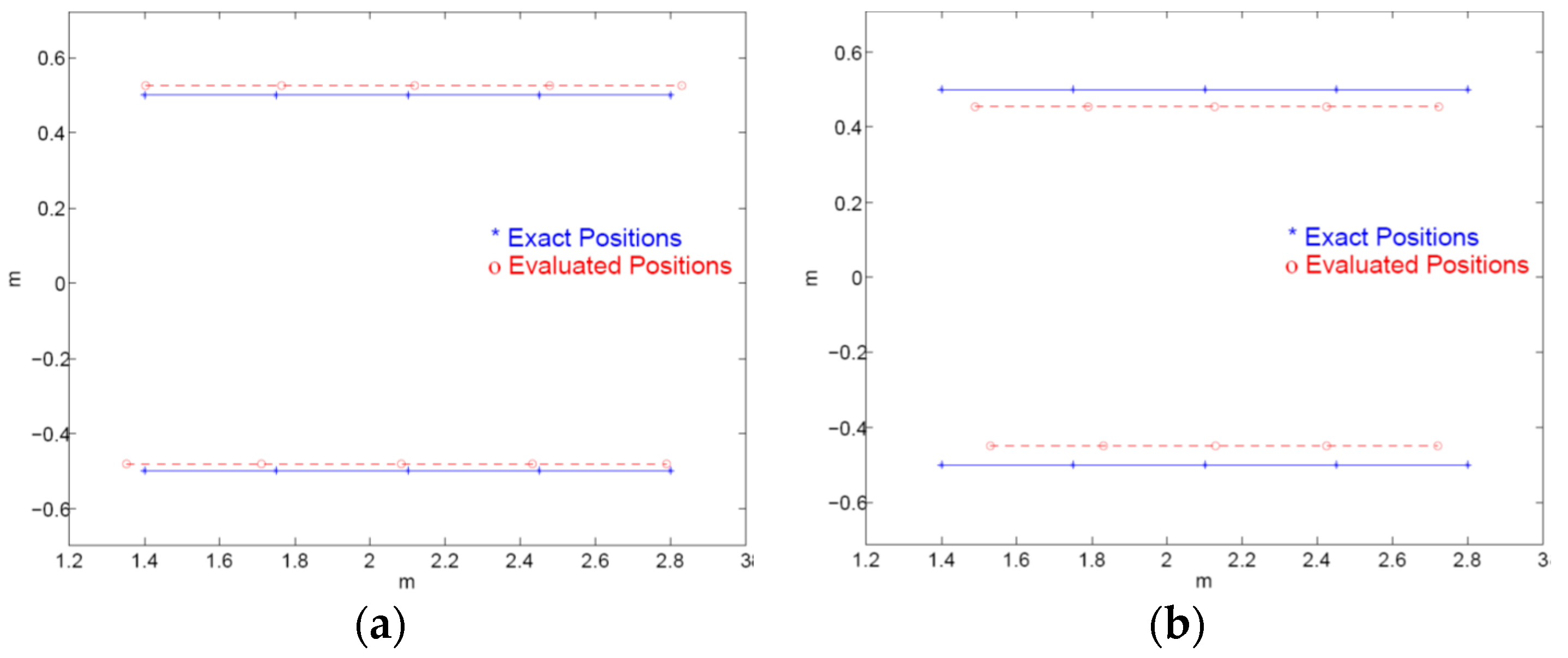
Figure 6 sketches the position evaluation results of the simulations in the case studies. The solid lines and the dashed lines stand for the exact positions and the evaluated positions of the assigned lane marks, respectively. The evaluated positions of those marks are all in the arithmetic progressions, and can be solved by numerical methods recursively. These results show that the proposed approach can evaluate the positions of specified collinear objects, even though there is a slight misalignment of the attitude for the camera. However, there are still errors between the exact positions and the evaluated ones. The errors may come from the accuracy of the camera geometry, the aspherical lens of camera, the accuracy of the pixel indexes chosen in the result pictures, etc.
The accuracy of the position evaluations depends on the mapped-on positions of the pixels of objects. The vehicle vibrations from rough roads, and the external image disturbances from ill environment such as rain, light, shadow, etc., are indeed the key factors which affect the recognition accuracy. In practice, the effects of vehicle vibrations are relatively small because of the shock absorbers on the vehicle. A camera stabilizer could be equipped for the sake of capturing a high quality image if the vehicle vibrations are tremendous. The effects of the image disturbances from the environment are one of the most significant issues. Some image process may overcome the image noise and disturbance problems such as medium filter, vector median filter, vector directional filter, adaptive median filter, adaptive nearest neighbor filter, etc.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}