
Muography for Inspection of Civil Structures
 , , and
, , and
Abstract
1. Introduction
2. Principle of MST
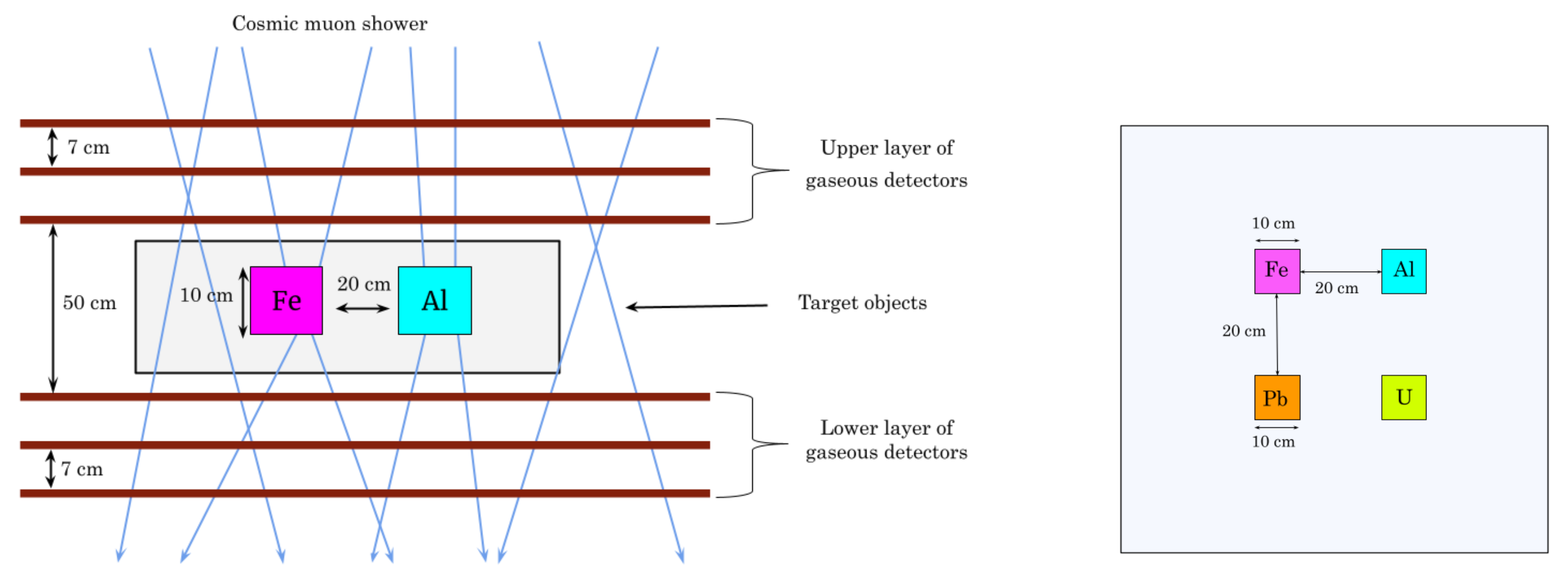
3. Geant4 Simulation Setup for MST
4. Track Reconstruction and Image Production
- The muon track must pass through all the detectors.
- The scattering location must fall inside the RoI.
- Angle between the track-lets constructed from any two pair of detectors in the upper/lower set, must not exceed 10 mrad.
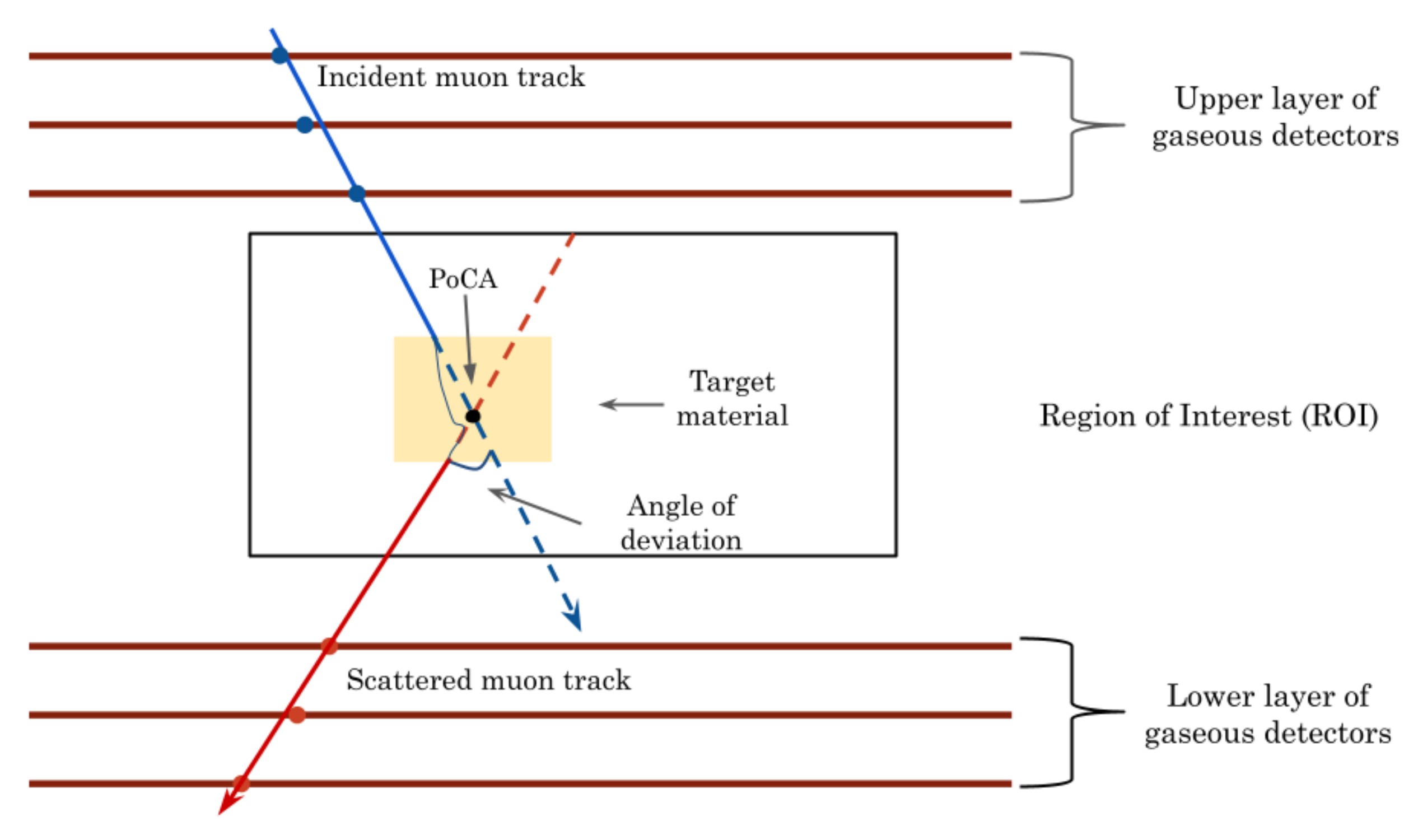
4.1. Point of Closest Approach (PoCA) and Estimation of Angle of Deviation
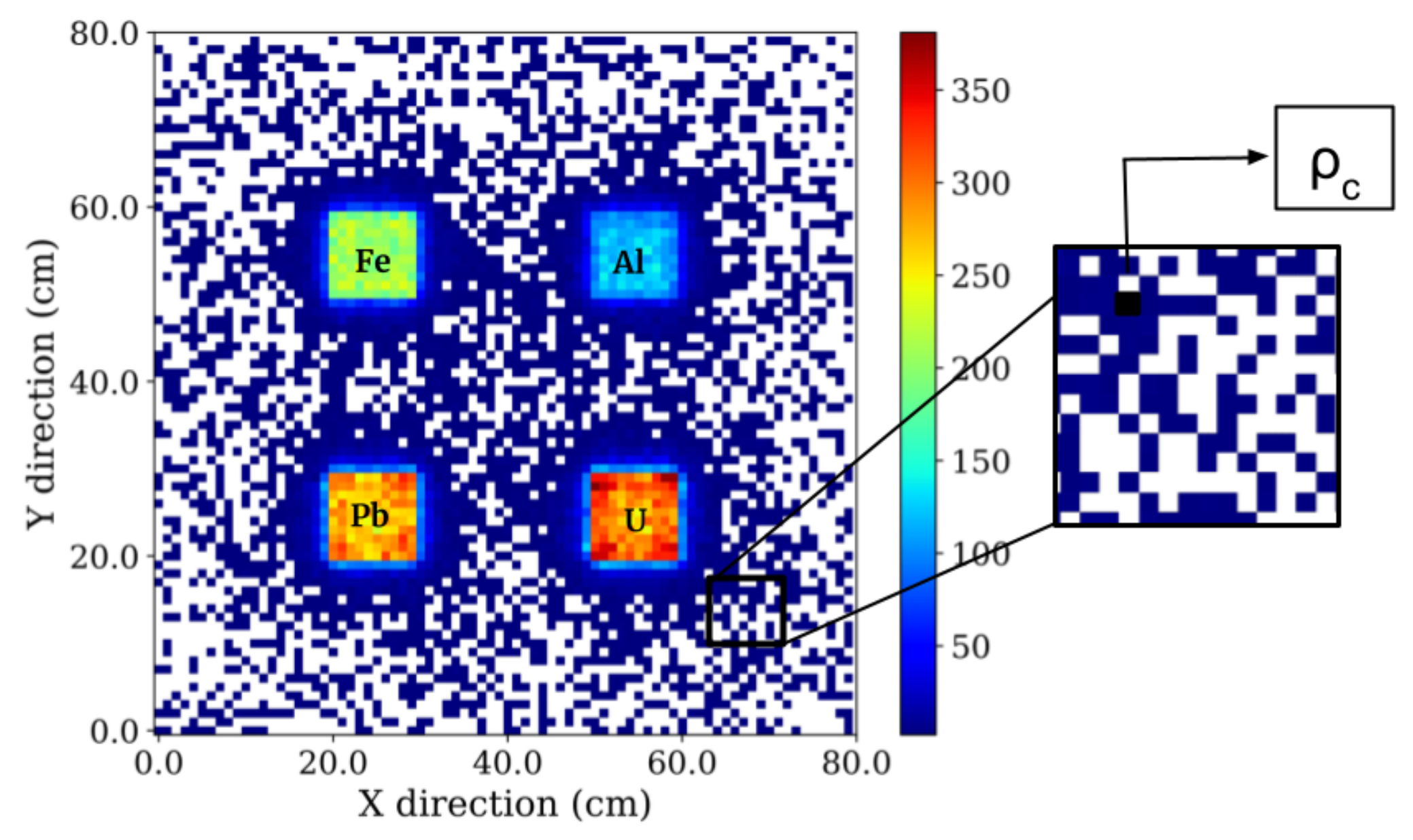
4.2. 2D Image Production
5. Analysis
5.1. Noise Reduction by Pattern Recognition Method
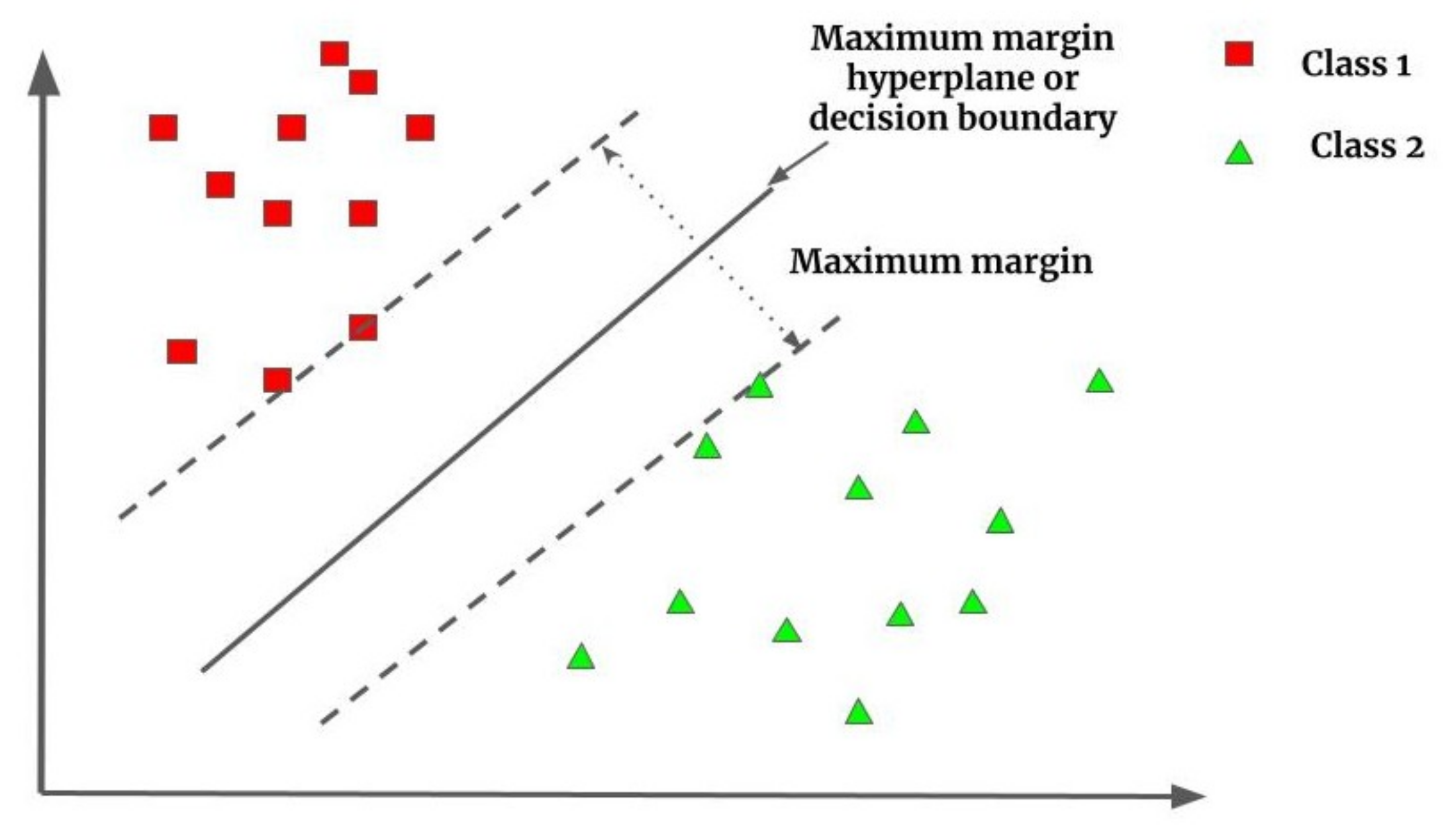
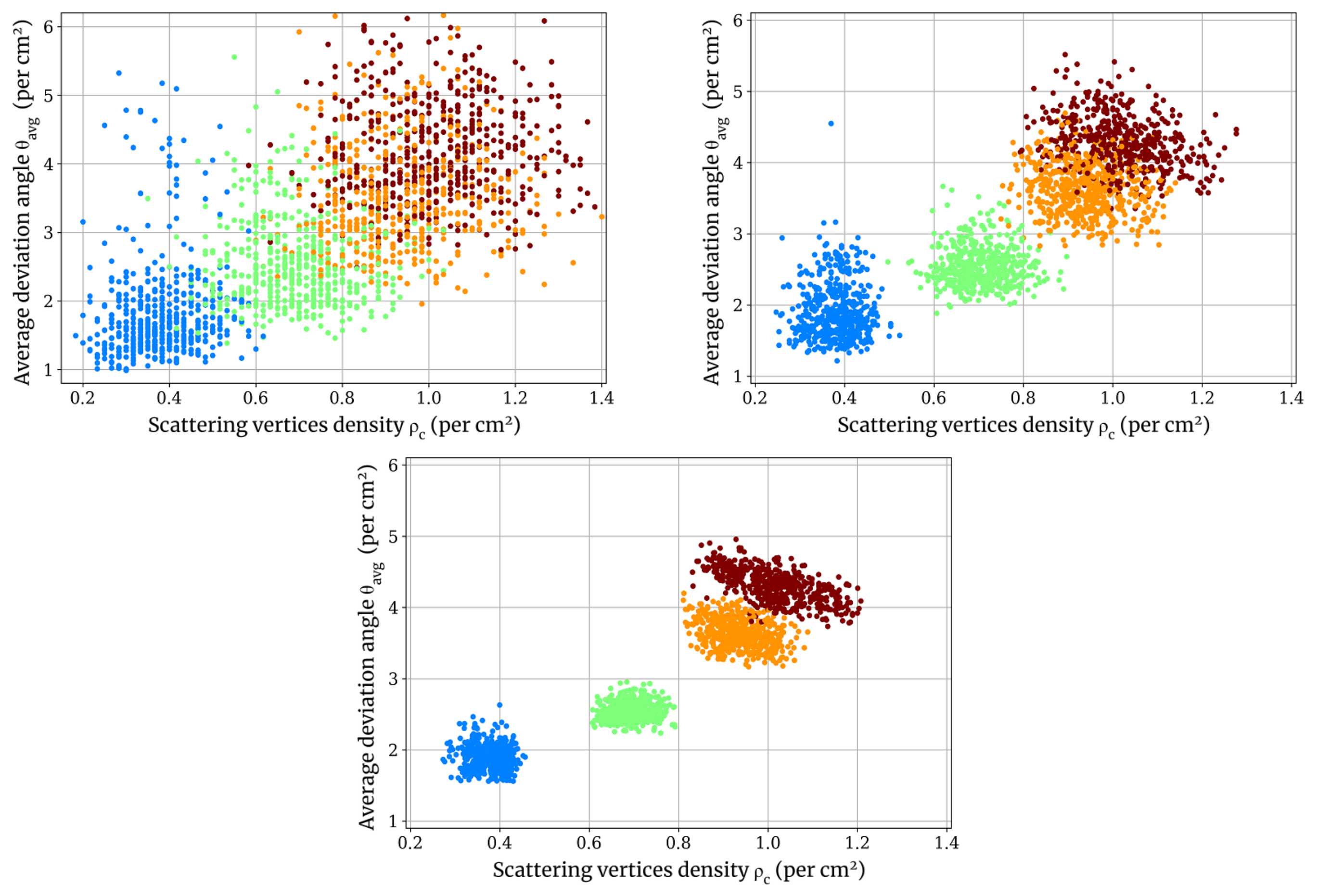
5.2. Machine Learning for Material Identification
5.3. Training the SVM Classifier
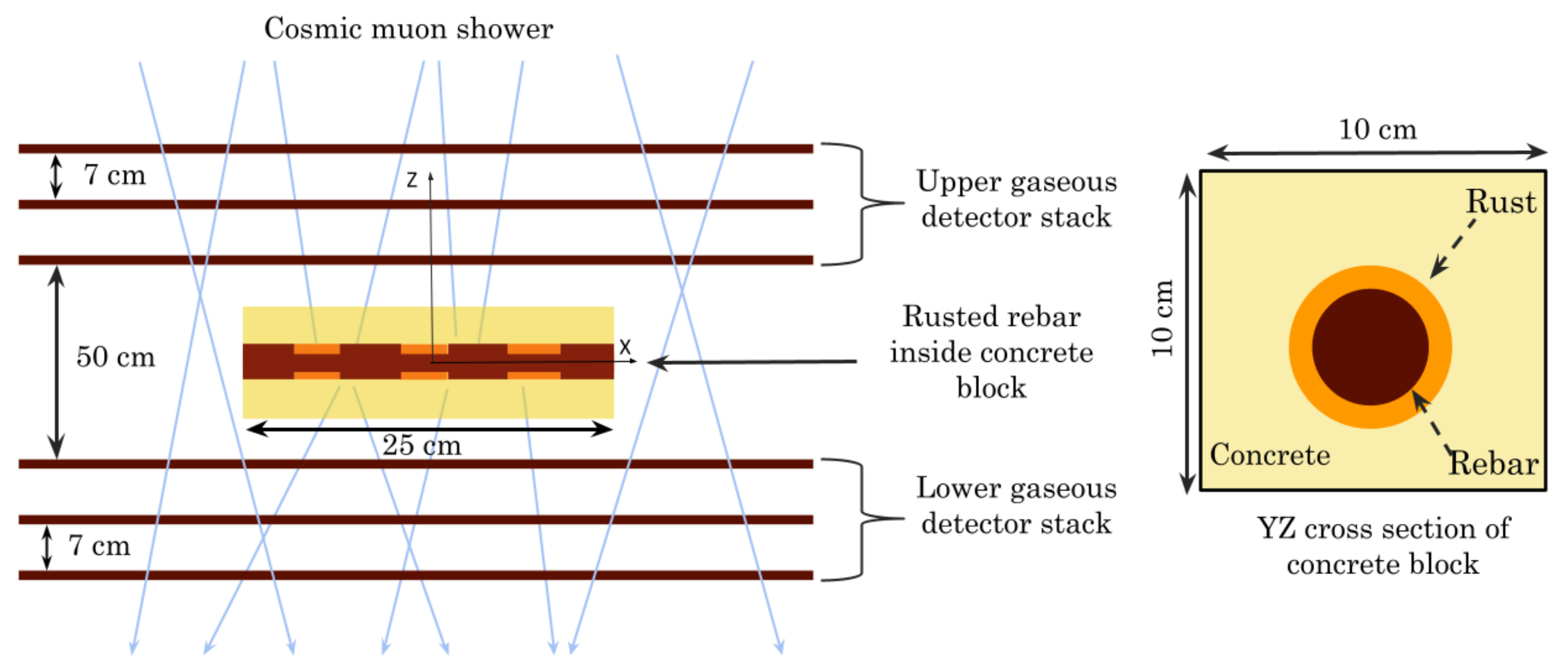
6. Inspection of the Rusted Rebar
6.1. Simulation Setup
6.2. Analysis
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mattock, A.H.; Chen, K.; Soongswang, K. The behavior of reinforced concrete corbels. PCI J. 1976, 21, 52–77. [Google Scholar] [CrossRef]
- Shubin, A.A.; Tulin, P.K.; Potseshkovskaya, I.V. Research of the effect of the concrete reinforcement structure on the stress-strain state of structures. Int. J. Appl. Eng. Res. 2017, 12, 1742–1751. [Google Scholar]
- McGurn, J. Stainless steel reinforcing bars in concrete. In Proceedings of the International Conference of Corrosion and Rehabilitation of Reinforced Concrete Structures, Orlando, FL, USA, 8–11 December 1998; FHWA: Orlando, FL, USA, 1998. [Google Scholar]
- Dong, W.; Wu, Z.; Zhou, X.; Tan, Y. Experimental studies on void detection in concrete-filled steel tubes using ultrasound. Constr. Build. Mater. 2016, 128, 154–162. [Google Scholar] [CrossRef]
- Abdel-Qader, I.; Yohali, S.; Abudayyeh, O.; Yehia, S. Segmentation of thermal images for non-destructive evaluation of bridge decks. Ndt E Int. 2008, 41, 395–405. [Google Scholar] [CrossRef]
- Maierhofer, C.; Röllig, M.; Schlichting, J. Active thermography for evaluation of reinforced concrete structures. In Non-Destructive Evaluation of Reinforced Concrete Structures; Elsevier: Amsterdam, The Netherlands, 2010; pp. 370–402. [Google Scholar]
- Bungey, J. Sub-surface radar testing of concrete: A review. Constr. Build. Mater. 2004, 18, 1–8. [Google Scholar] [CrossRef]
- Sansalone, M.J.; Streett, W.B. Impact-Echo. Nondestructive Evaluation of Concrete and Masonry. The Book: Bullbrier Press, PA, United States. 1997. Available online: http://impact-echo.com/book/ (accessed on 30 September 2022).
- George, E.P. Cosmic rays measure overburden of tunnel. Commonw. Eng. 1955, 455. [Google Scholar]
- Alvarez, L.W.; Anderson, J.A.; Bedwei, F.E.; Burkhard, J.; Fakhry, A.; Girgis, A.; Goneid, A.; Hassan, F.; Iverson, D.; Lynch, G.; et al. Search for Hidden Chambers in the Pyramids: The structure of the Second Pyramid of Giza is determined by cosmic-ray absorption. Science 1970, 167, 832–839. [Google Scholar] [CrossRef]
- Nagamine, K. Geo-tomographic observation of inner-structure of volcano with cosmic-ray muons. J. Geogr. Chigaku Zasshi 1995, 104, 998–1007. [Google Scholar] [CrossRef][Green Version]
- Saracino, G.; Amato, L.; Ambrosino, F.; Antonucci, G.; Bonechi, L.; Cimmino, L.; Consiglio, L.; Alessandro, R.; Luzio, E.D.; Minin, G.; et al. Imaging of underground cavities with cosmic-ray muons from observations at Mt. Echia (Naples). Sci. Rep. 2017, 7, 1181. [Google Scholar] [CrossRef]
- Yang, G.; Ireland, D.; Kaiser, R.; Mahon, D. Machine Learning for Muon Imaging. In Proceedings of the International Conference on Brain Inspired Cognitive Systems; Springer: Berlin/Heidelberg, Germany, 2018; pp. 808–817. [Google Scholar]
- Dobrowolska, M.; Velthuis, J.; Kopp, A.; Perry, M.; Pearson, P. Towards an application of muon scattering tomography as a technique for detecting rebars in concrete. Smart Mater. Struct. 2020, 29, 055015. [Google Scholar] [CrossRef]
- Niederleithinger, E.; Gardner, S.; Kind, T.; Kaiser, R.; Grunwald, M.; Yang, G.; Redmer, B.; Waske, A.; Mielentz, F.; Effner, U.; et al. Muon Tomography of the Interior of a Reinforced Concrete Block: First Experimental Proof of Concept. J. Nondestruct. Eval. 2021, 40, 1–14. [Google Scholar] [CrossRef]
- Tripathy, S.; Datta, J.; Majumdar, N.; Mukhopadhyay, S. Numerical evaluation of a muon tomography system for imaging defects in concrete structures. Eur. Phys. J. Plus 2021, 136, 824. [Google Scholar] [CrossRef]
- Schultz, L.J.; Borozdin, K.N.; Gomez, J.J.; Hogan, G.E.; McGill, J.A.; Morris, C.L.; Priedhorsky, W.C.; Saunders, A.; Teasdale, M.E. Image reconstruction and material Z discrimination via cosmic ray muon radiography. Nucl. Instrum. Meth. A 2004, 519, 687–694. [Google Scholar] [CrossRef]
- Clarkson, A.; Hamilton, D.J.; Hoek, M.; Ireland, D.G.; Johnstone, J.; Kaiser, R.; Keri, T.; Lumsden, S.; Mahon, D.F.; McKinnon, B.; et al. The design and performance of a scintillating-fibre tracker for the cosmic-ray muon tomography of legacy nuclear waste containers. Nucl. Instrum. Methods Phys. Res. Sect. Accel. Spectr. Detect. Assoc. Equip. 2014, 745, 138–149. [Google Scholar] [CrossRef]
- Jonkmans, G.; Anghel, V.; Jewett, C.; Thompson, M. Nuclear waste imaging and spent fuel verification by muon tomography. Ann. Nucl. Energy 2013, 53, 267–273. [Google Scholar] [CrossRef]
- Martínez Ruiz del Arbol, P.; Gomez Garcia, P.; Diez Gonzalez, C.; OrioAlonso, A. Non-destructive testing of industrial equipment using muon radiography. Philos. Trans. R. Soc. 2019, 377, 20180054. [Google Scholar] [CrossRef] [PubMed]
- Dobrowolska, M.; Velthuis, J.; Kopp, A.; De Sio, C.; Milne, R.; Pearson, P. Development of muon scattering tomography for a detection of reinforcement in concrete. Eng. Res. Express 2021, 3, 035037. [Google Scholar] [CrossRef]
- Highland, V.L. Some Practical Remarks on Multiple Scattering. Nucl. Instrum. Meth. 1975, 129, 497. [Google Scholar] [CrossRef]
- Allison, J.; Amako, K.; Apostolakis, J.; Araujo, H.; Arce Dubois, P.; Asai, M.; Barrand, G.; Capra, R.; Chauvie, S.; Chytracek, R.; et al. Geant4 developments and applications. IEEE Trans. Nucl. Sci. 2006, 53, 270–278. [Google Scholar] [CrossRef]
- Tripathy, S.; Datta, J.; Majumdar, N.; Mukhopadhyay, S. Material Discrimination in Cosmic Muon Imaging using Pattern Recognition Method. JINST 2020, 15, P06029. [Google Scholar] [CrossRef]
- Support Vectpr Machines. Available online: https://scikit-learn.org/stable/modules/svm.html (accessed on 30 September 2022).
- Cosmic Rays. Available online: https://pdg.lbl.gov/2020/reviews/rpp2020-rev-cosmic-rays.pdf (accessed on 30 September 2022).
- Moliere, G. Theory of scattering of fast charged particles ii multiple and multiple scattering. J. Nat. Res. 1948, 3, 78–97. [Google Scholar]
- Lynch, G.R.; Dahl, O.I. Approximations to multiple Coulomb scattering. Nucl. Instrum. Methods Phys. Res. Sect. Beam Interact. Mater. Atoms 1991, 58, 6–10. [Google Scholar] [CrossRef]
- Hagmann, C.; Lange, D.; Wright, D. Cosmic-ray shower generator (CRY) for Monte Carlo transport codes. In Proceedings of the 2007 IEEE Nuclear Science Symposium Conference Record, Honolulu, HI, USA, 26 October–3 November 2007; Volume 2, pp. 1143–1146. [Google Scholar]
- One-Vs-One Classifier. Available online: https://scikit-learn.org/stable/modules/generated/sklearn.multiclass.OneVsOneClassifier.html (accessed on 30 September 2022).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Exposure Time (h) | Al-Fe | Fe-Pb | Pb-U |
|---|---|---|---|
| 1 | 4.5 | 7.3 | 25.7 |
| 5 | 0.0 | 0.3 | 1.9 |
| 24 | 0.0 | 0.0 | 0.5 |
| Rust Type | Rebar Diameter (mm) | Rust Thickness (mm) |
|---|---|---|
| Without rust | 30.0 | 0.0 |
| 15% rust | 25.5 | 2.25 |
| 30% rust | 21.0 | 4.5 |
| Exposure Time (Days) | Without Rust | 15% Rust | 30% Rust |
|---|---|---|---|
| 3 | 22.3 | 23.0 | 27.8 |
| 15 | 4.5 | 10.9 | 14.7 |
| 30 | 1.1 | 1.4 | 7.3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Das, S.; Tripathy, S.; Jagga, P.; Bhattacharya, P.; Majumdar, N.; Mukhopadhyay, S. Muography for Inspection of Civil Structures. Instruments 2022, 6, 77. https://doi.org/10.3390/instruments6040077
Das S, Tripathy S, Jagga P, Bhattacharya P, Majumdar N, Mukhopadhyay S. Muography for Inspection of Civil Structures. Instruments. 2022; 6(4):77. https://doi.org/10.3390/instruments6040077
Chicago/Turabian StyleDas, Subhendu, Sridhar Tripathy, Priyanka Jagga, Purba Bhattacharya, Nayana Majumdar, and Supratik Mukhopadhyay. 2022. "Muography for Inspection of Civil Structures" Instruments 6, no. 4: 77. https://doi.org/10.3390/instruments6040077
APA StyleDas, S., Tripathy, S., Jagga, P., Bhattacharya, P., Majumdar, N., & Mukhopadhyay, S. (2022). Muography for Inspection of Civil Structures. Instruments, 6(4), 77. https://doi.org/10.3390/instruments6040077