
Advanced Robotic System with Keypoint Extraction and YOLOv5 Object Detection Algorithm for Precise Livestock Monitoring




Abstract
:1. Introduction
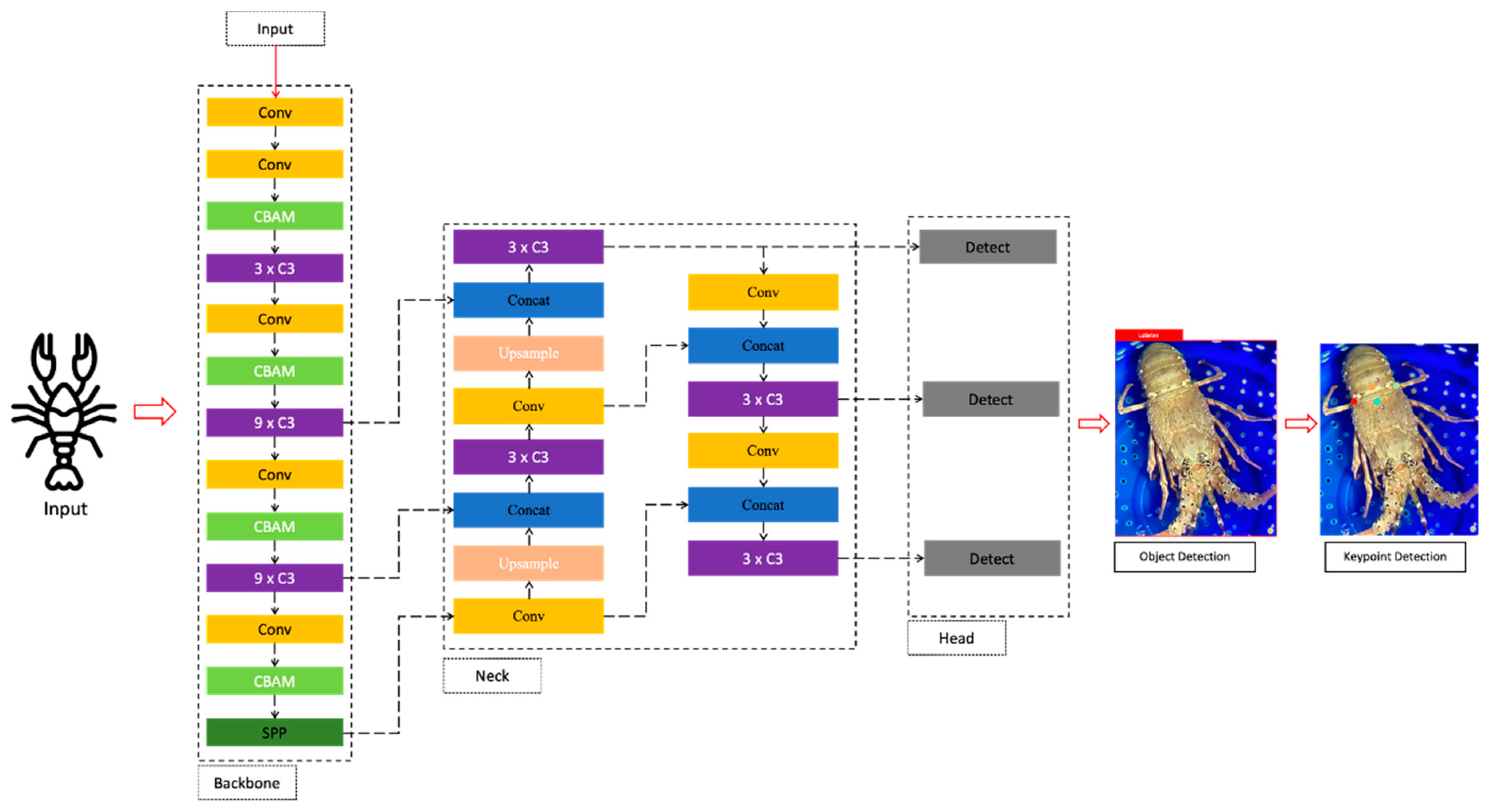
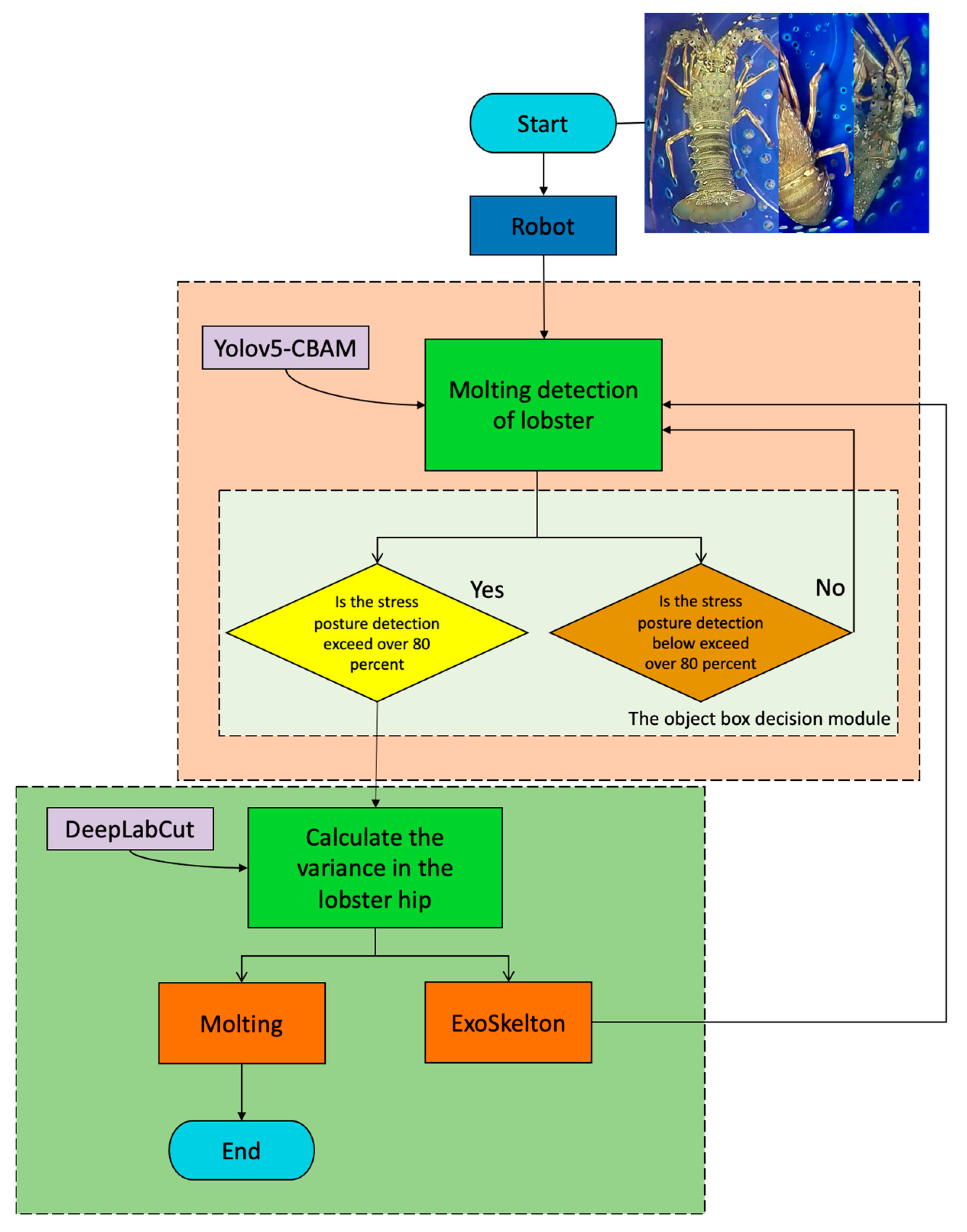
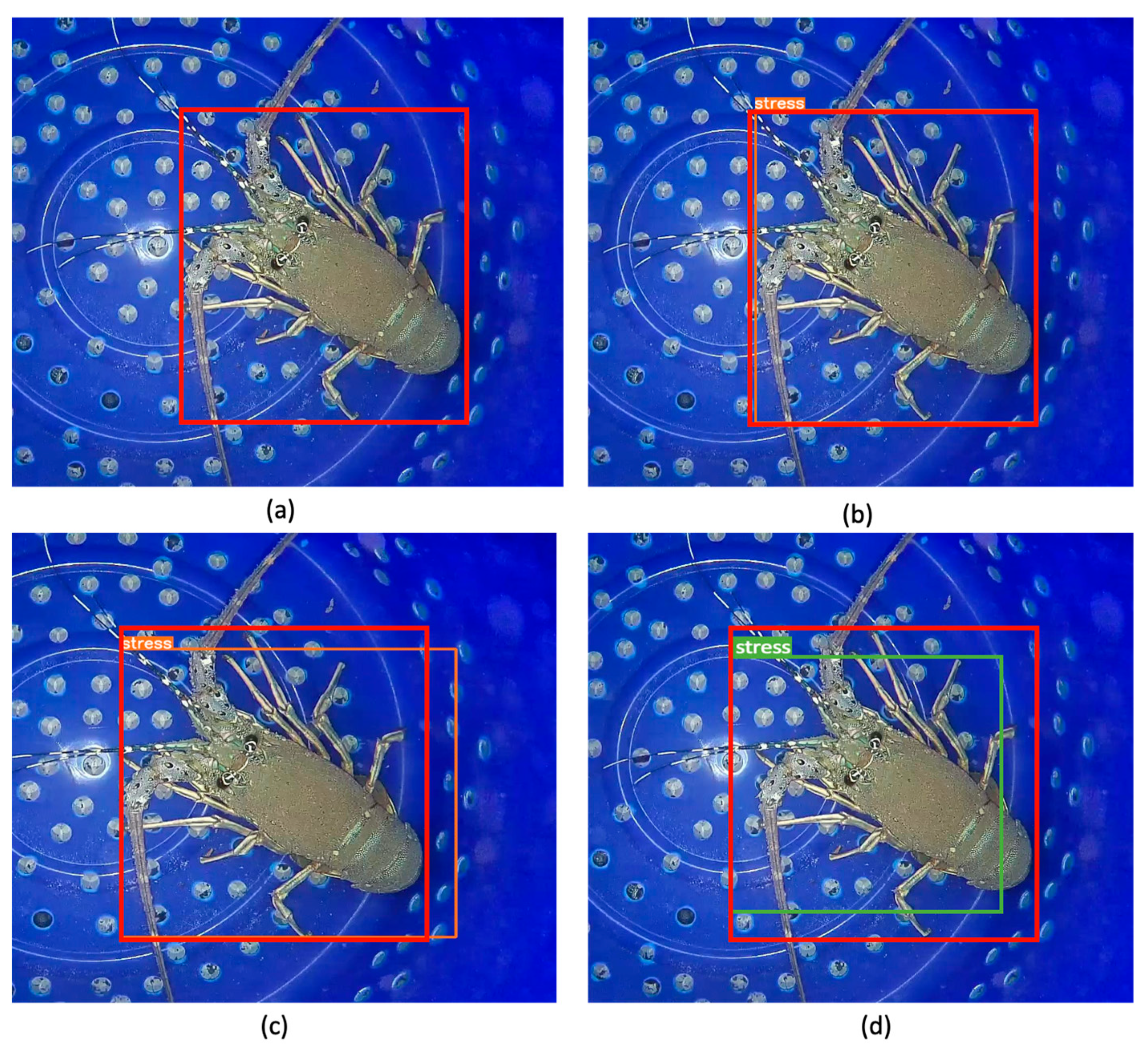
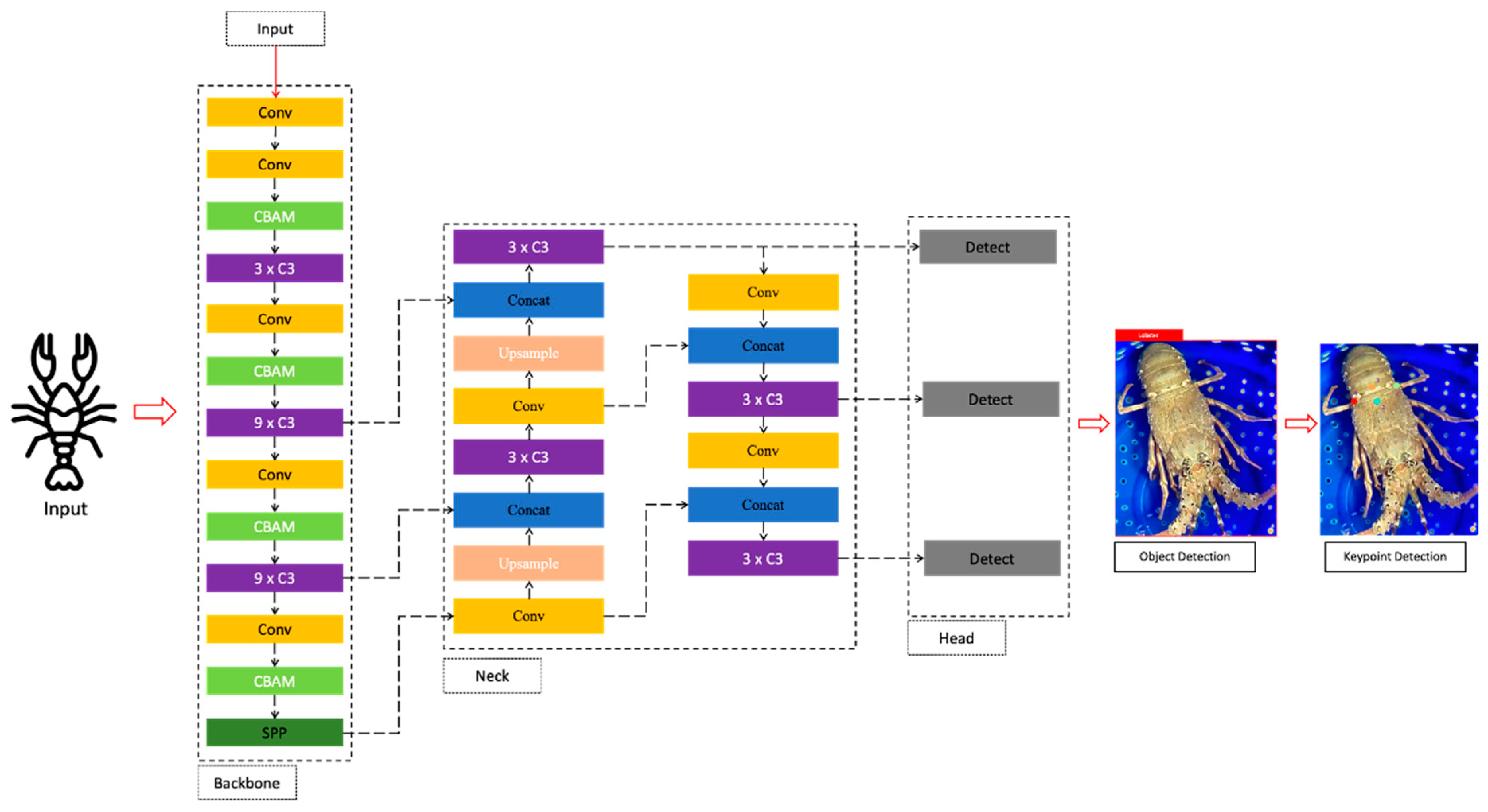
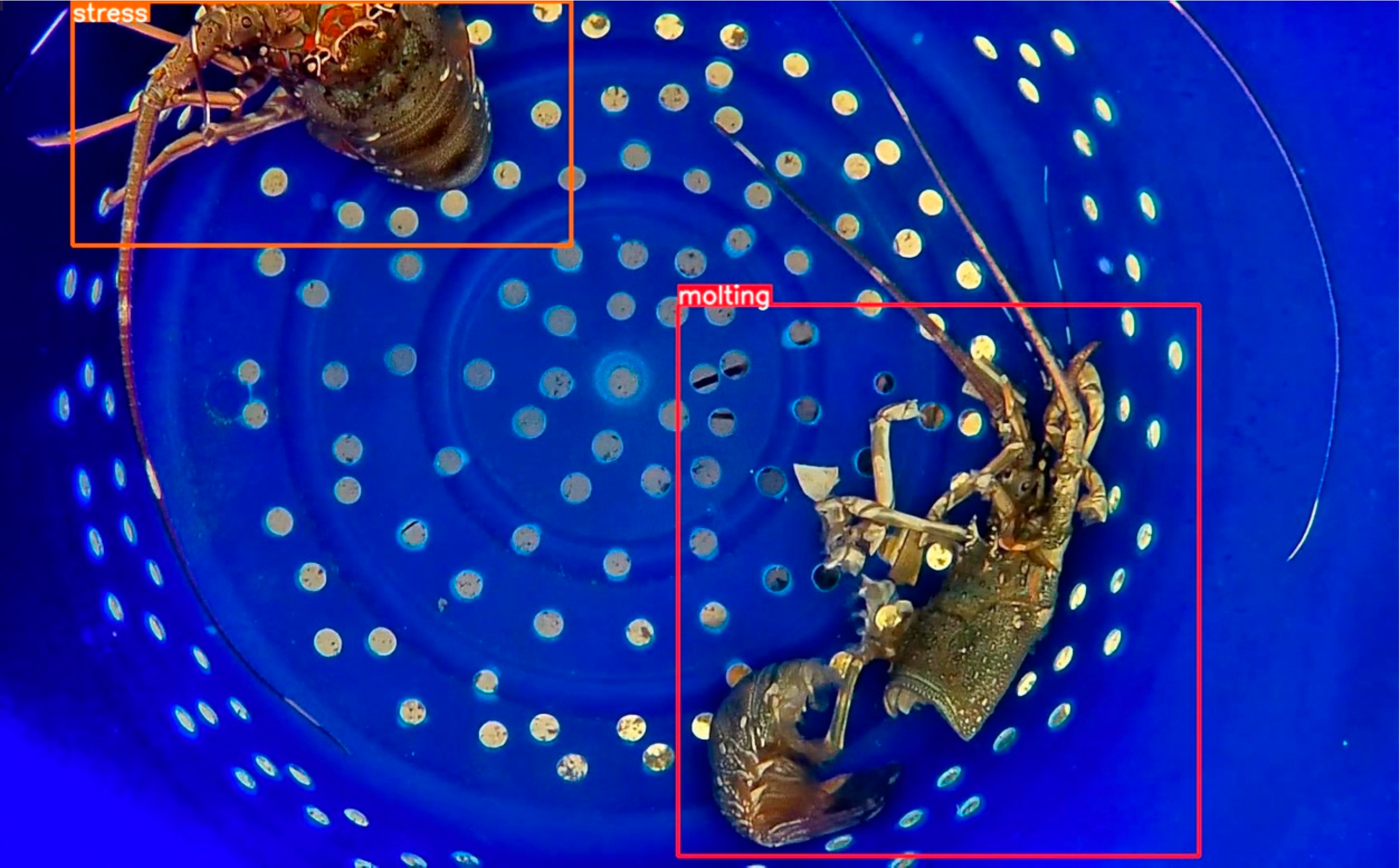
- Novel Backbone Architecture with Attention Mechanism: We have utilized a novel backbone architecture that combines the strengths for extracting the rich features from the input data and focuses specifically on the lobster, enhancing the accuracy and performance of the molting.
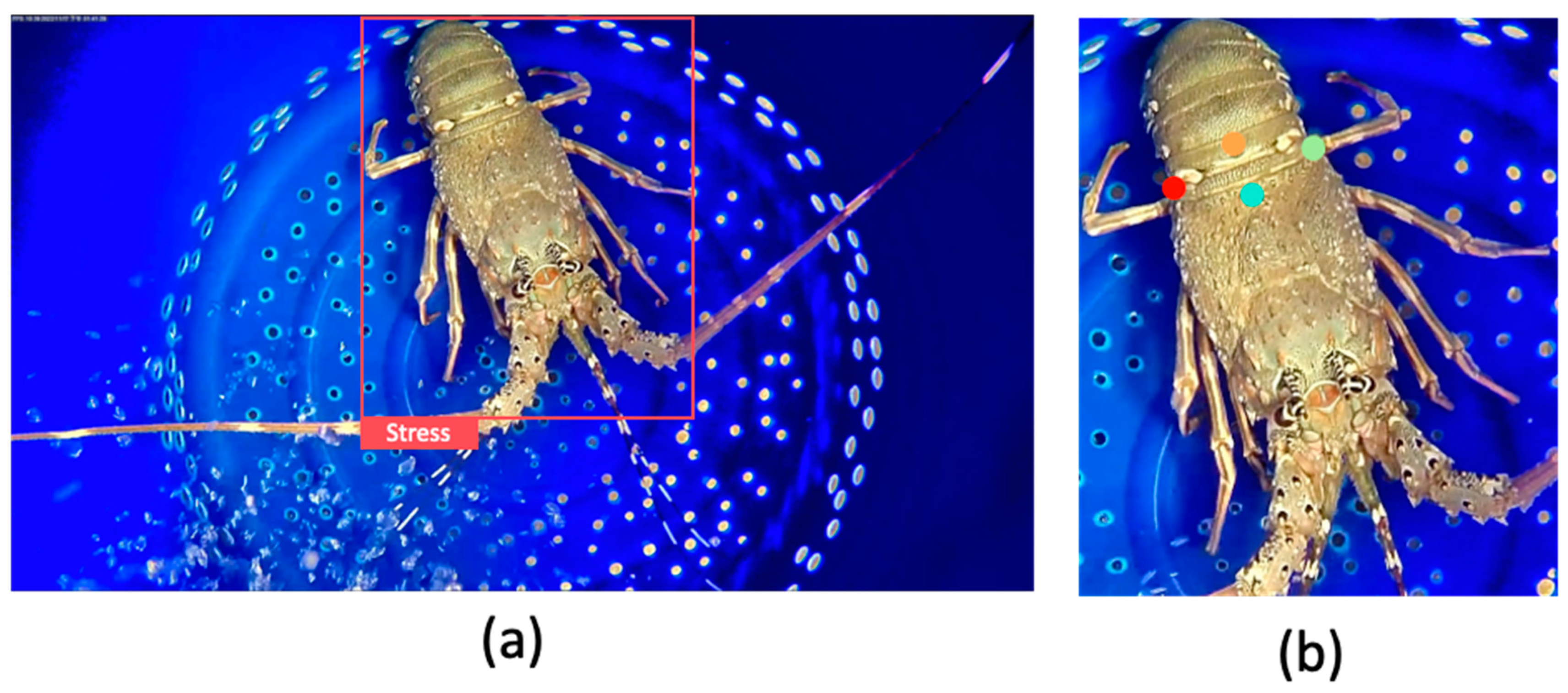
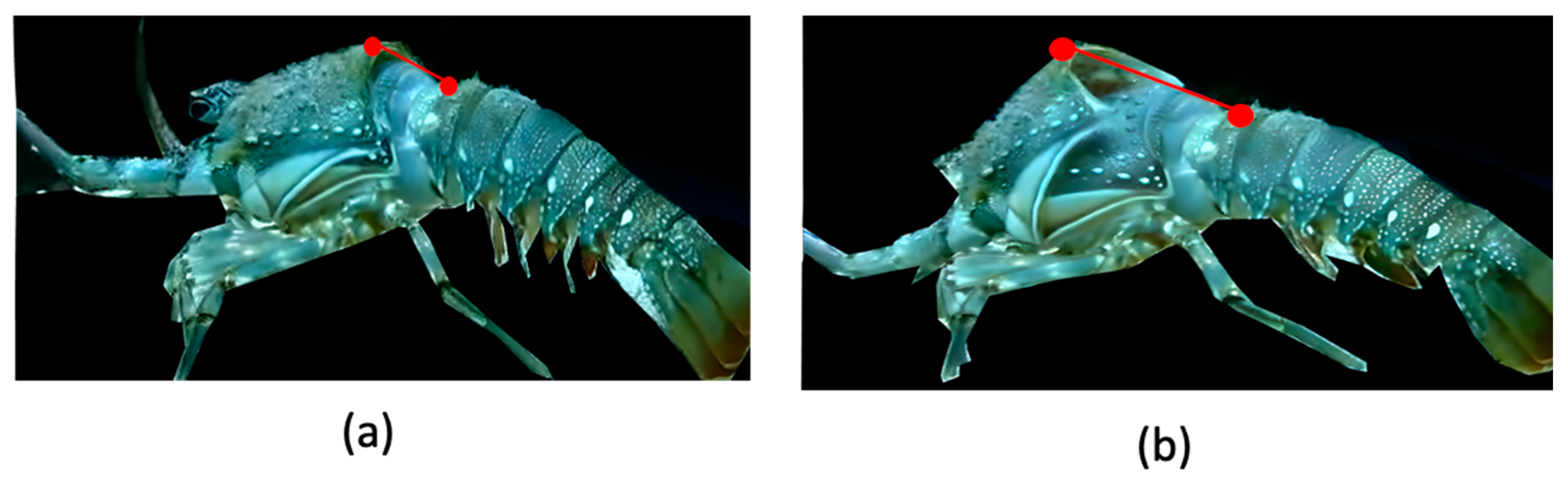
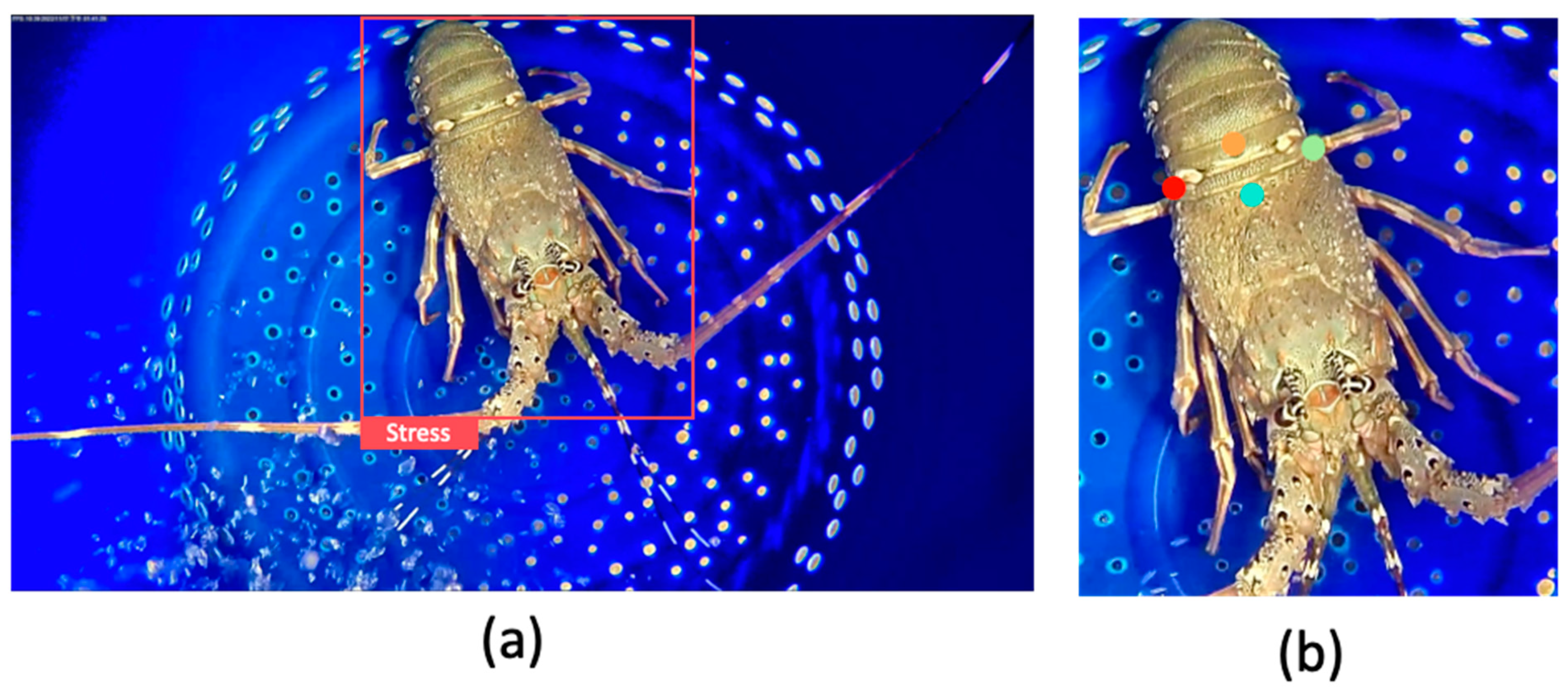
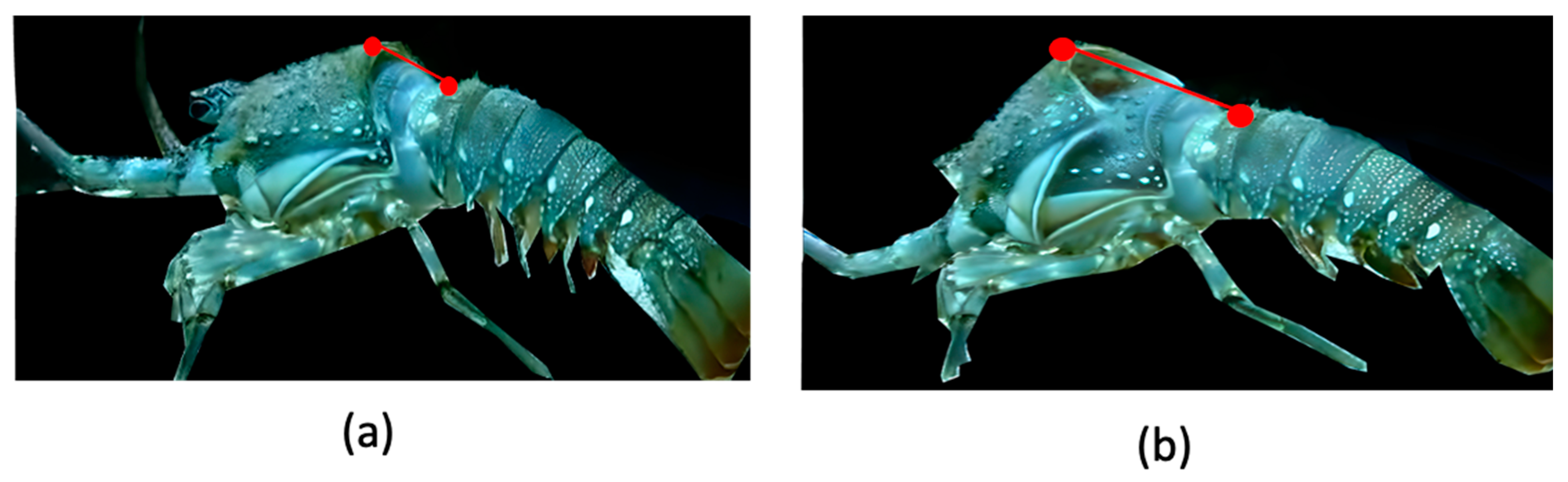
- Utilization of Keypoint Detection: To accurately identify the lobster molting, we have incorporated keypoint detection. This technique further improves the effectiveness of the proposed architecture by capturing the keypoints in the lobster’s body.
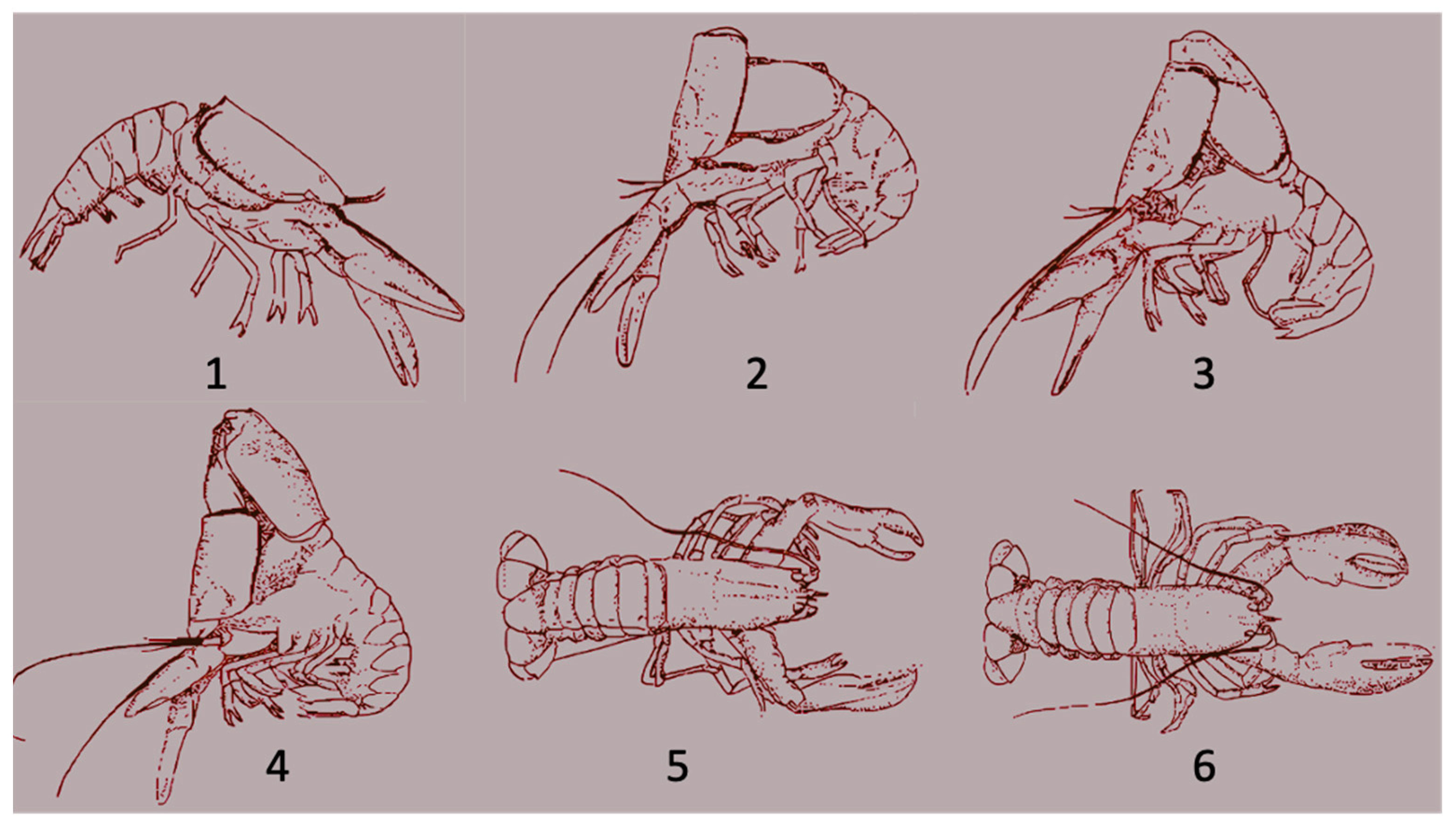
- Analysis of Posture Change Frequency: As part of the study, we compared the frequency of posture change exhibited by lobsters in the molting period. The results offer important new understandings of the movements and behavioral characteristics of lobsters throughout the molting process.
2. Materials and Methods
2.1. Data Collection
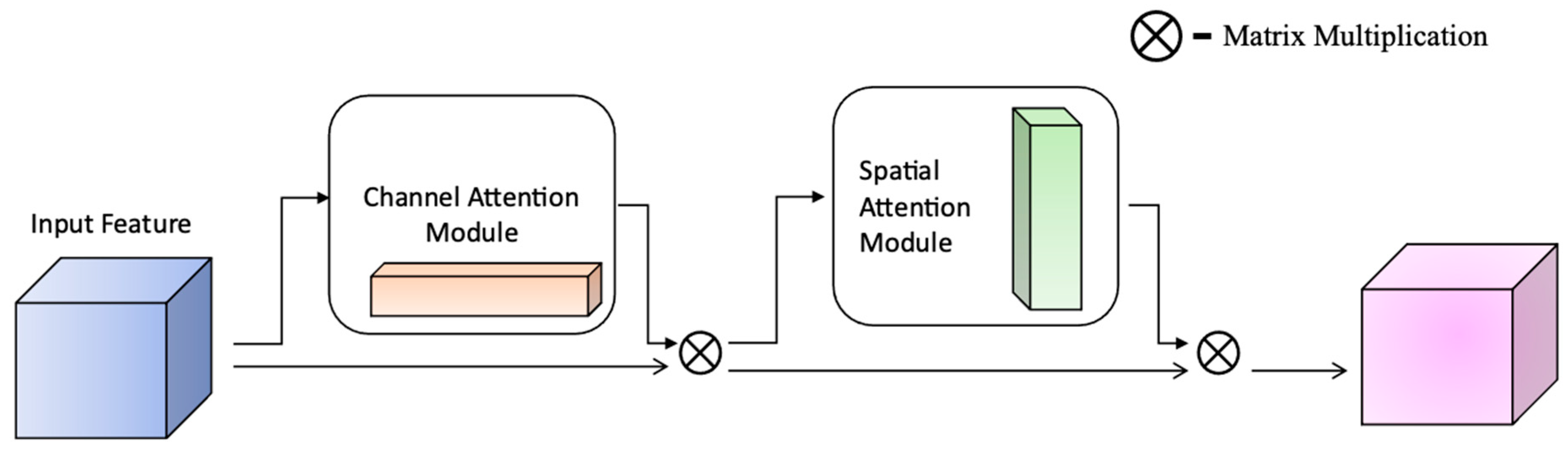
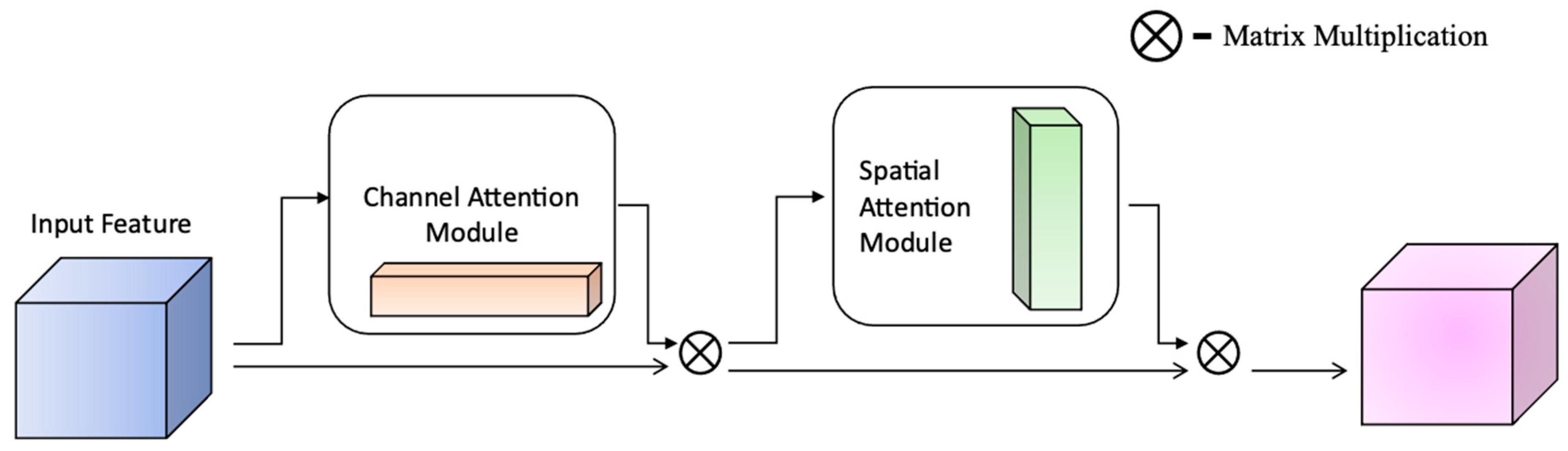
2.2. Convolutional Block Attention Module Fused in Yolov5s
2.3. Keypoint Detection
3. Discussion
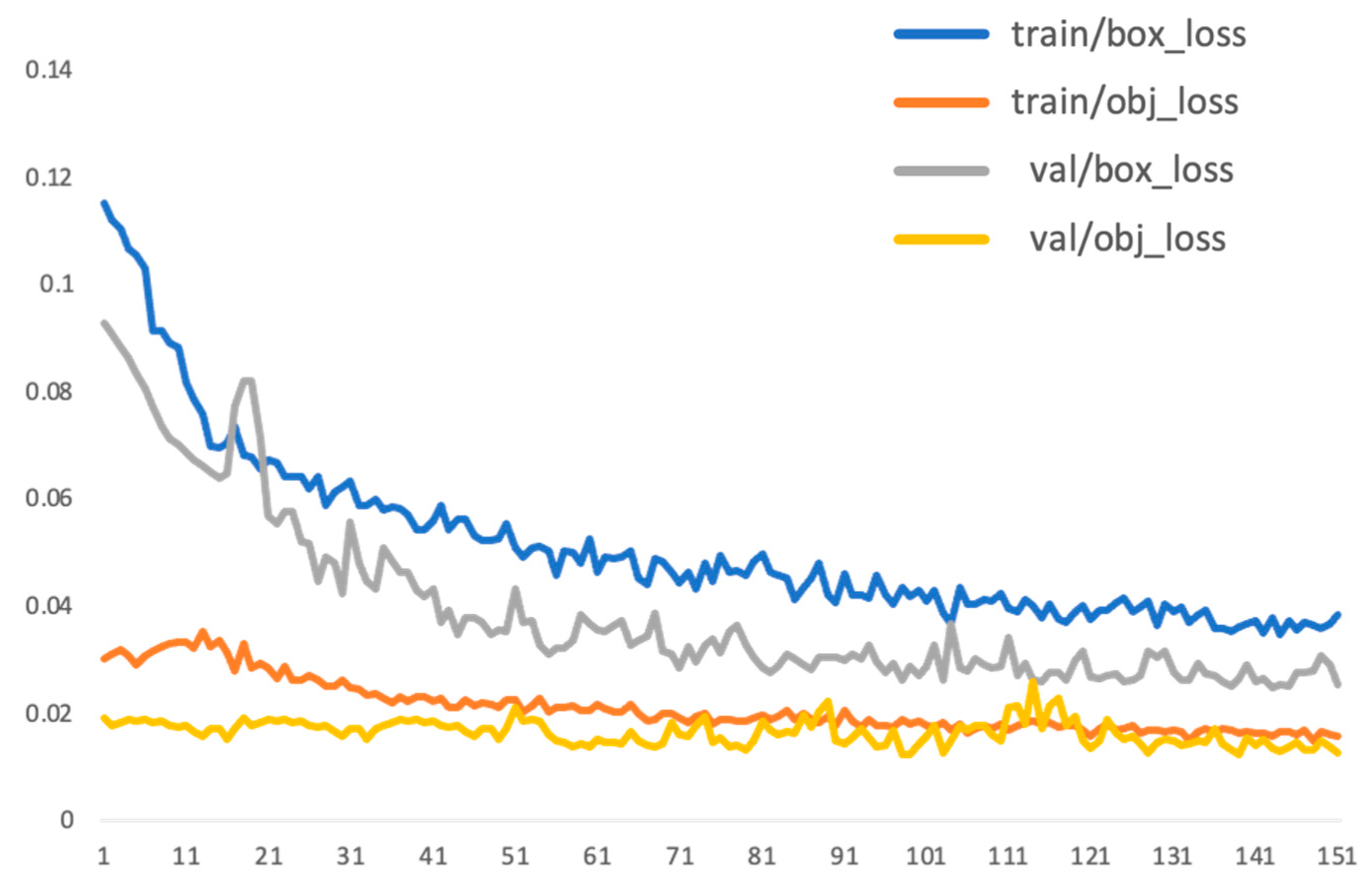
3.1. Implementation
3.2. Behavior Analysis
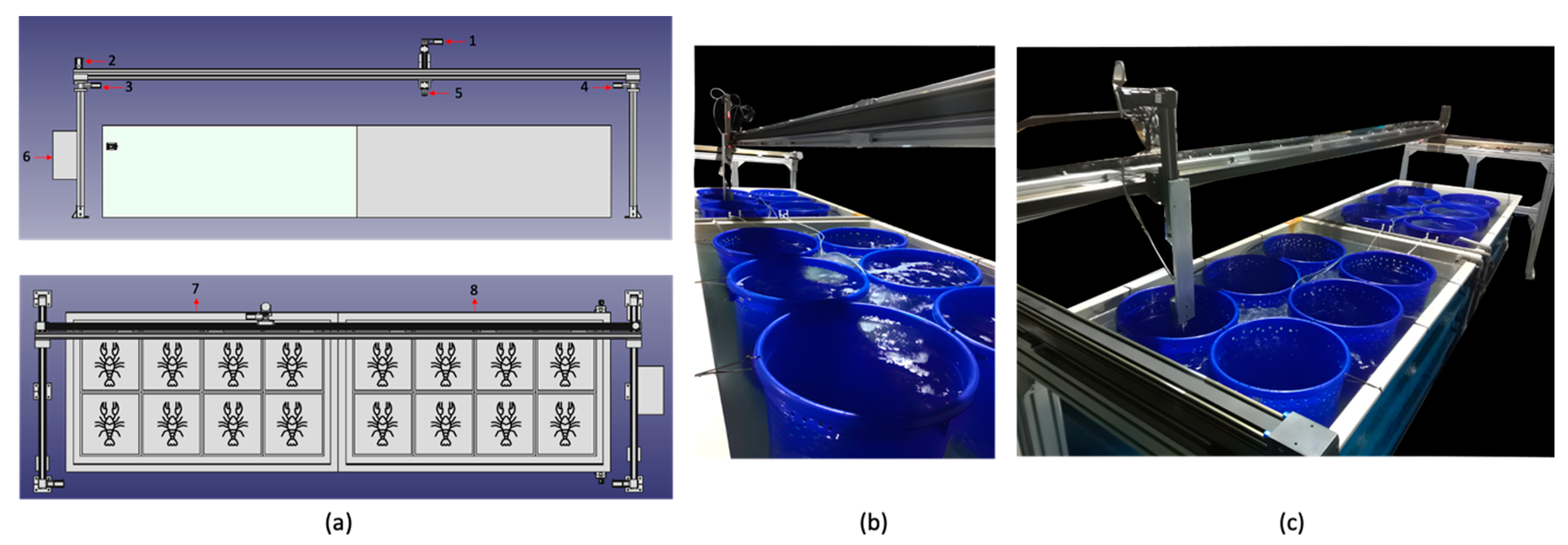
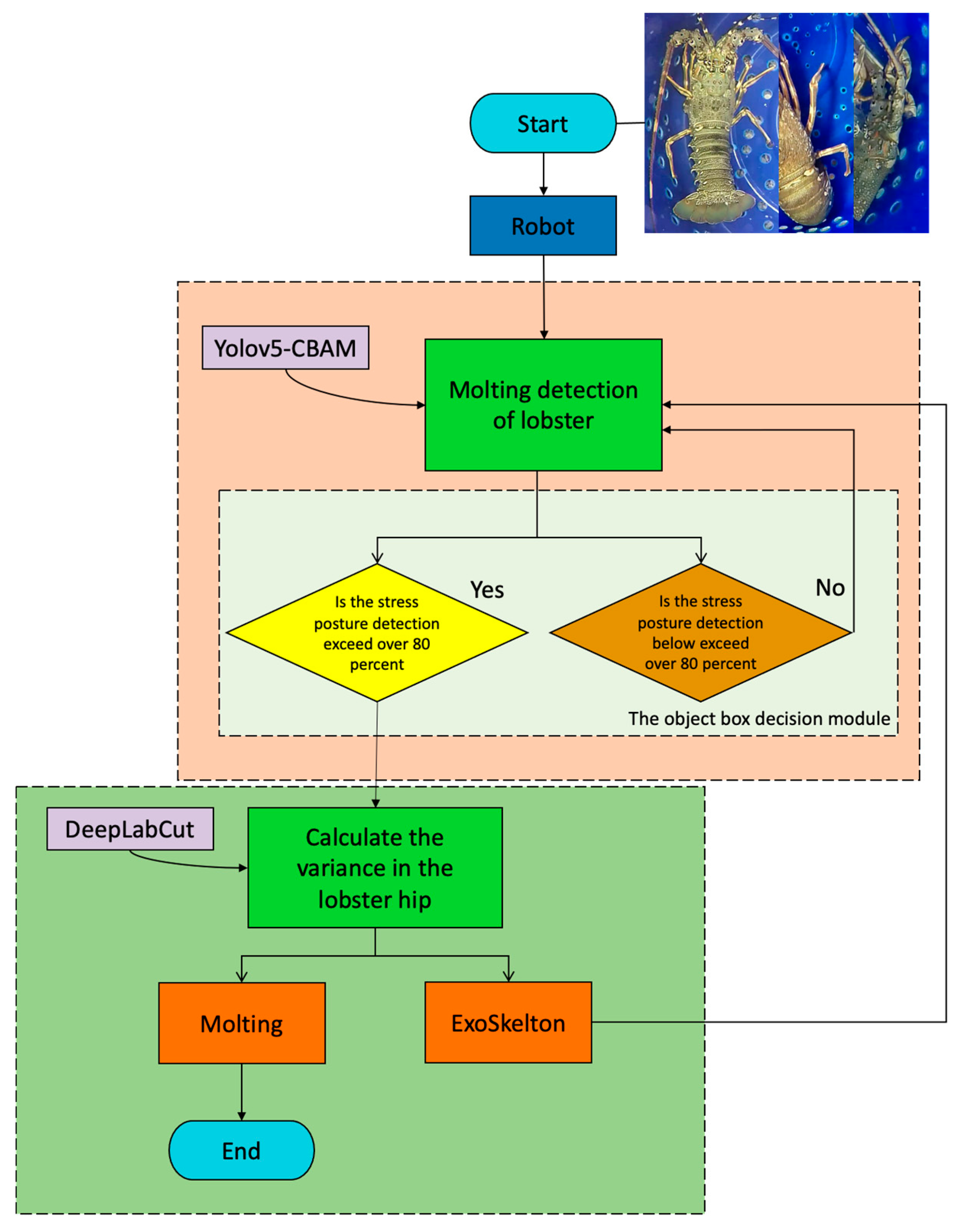
3.3. System Design
3.4. Experimental Results
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Tveterås, S.; Asche, F.; Bellemare, M.F.; Smith, M.D.; Guttormsen, A.G.; Lem, A.; Lien, K.; Vannuccini, S. Fish is food-the FAO’s fish price index. PLoS ONE 2012, 7, e36731. [Google Scholar] [CrossRef] [PubMed]
- Jameel, S. Climate change, food systems, and the Islamic perspective on alternative proteins. Trends Food Sci. Technol. 2023, 138, 480–490. [Google Scholar] [CrossRef]
- Jones, C.M.; Le Anh, T.; Priyambodo, B. Lobster aquaculture development in Vietnam and Indonesia. In Lobsters: Biology, Fisheries and Aquaculture; Springer: Singapore, 2019; pp. 541–570. [Google Scholar] [CrossRef]
- Pauly, D.; Zeller, D. Comments on FAO’s state of world fisheries and aquaculture (SOFIA 2016). Mar. Policy 2017, 77, 176–181. [Google Scholar] [CrossRef]
- Onyeaka, H.; Anumudu, C.K.; Al-Sharify, Z.T.; Egele-Godswill, E.; Mbaegbu, P. COVID-19 Pandemic: A Review of the Global Lockdown and Its Far-Reaching Effects. Sci. Prog. 2021, 104, 00368504211019854. [Google Scholar] [CrossRef] [PubMed]
- MacAulay, S.; Ellison, A.R.; Kille, P.; Cable, J. Moving towards improved surveillance and earlier diagnosis of aquatic pathogens: From traditional methods to emerging technologies. Rev. Aquac. 2022, 14, 1813–1829. [Google Scholar] [CrossRef] [PubMed]
- Kassem, T.; Shahrour, I.; El Khattabi, J.; Raslan, A. Smart and sustainable aquaculture farms. Sustainability 2021, 13, 10685. [Google Scholar] [CrossRef]
- Rauf, H.T.; Lali, M.I.U.; Zahoor, S.; Shah, S.Z.H.; Rehman, A.U.; Bukhari, S.A.C. Visual Features Based Automated Identification of Fish Species Using Deep Convolutional Neural Networks. Comput. Electron. Agric. 2019, 167, 105075. [Google Scholar] [CrossRef]
- Ubina, N.; Cheng, S.C.; Chang, C.C.; Chen, H.Y. Evaluating Fish Feeding Intensity in Aquaculture with Convolutional Neural Networks. Aquac. Eng. 2021, 94, 102178. [Google Scholar] [CrossRef]
- Wu, D.; Wang, Y.; Han, M.; Song, L.; Shang, Y.; Zhang, X.; Song, H. Using a CNN-LSTM for Basic Behaviors Detection of a Single Dairy Cow in a Complex Environment. Comput. Electron. Agric. 2021, 182, 106016. [Google Scholar] [CrossRef]
- Zhou, C.; Zhang, B.; Lin, K.; Xu, D.; Chen, C.; Yang, X.; Sun, C. Near-infrared Imaging to Quantify the Feeding Behavior of Fish in Aquaculture. Comput. Electron. Agric. 2017, 135, 233–241. [Google Scholar] [CrossRef]
- Wang, Y.; Yu, X.; Liu, J.; Zhao, R.; Zhang, L.; An, D.; Wei, Y. Research on quantitative method of fish feeding activity with semi-supervised based on appearance-motion representation. Biosyst. Eng. 2023, 230, 409–423. [Google Scholar] [CrossRef]
- Ahmed, M.S.; Aurpa, T.T.; Azad, M.A.K. Fish disease detection using image based machine learning technique in aquaculture. J. King Saud Univ. Comput. Inf. Sci. 2022, 34, 5170–5182. [Google Scholar] [CrossRef]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27 June–30 June 2016; pp. 779–788. [Google Scholar]
- Ran, X.; Li, B.; Li, D.; Wang, J.; Duan, Q. Detection of surfacing white shrimp under hypoxia based on improved lightweight YOLOv5 model. Aquacult. Int. 2023, 1–18. [Google Scholar] [CrossRef]
- Chen, C.; Wang, F.; Cai, Y.; Yi, S.; Zhang, B. An Improved YOLOv5s-Based Agaricus bisporus Detection Algorithm. Agronomy 2023, 13, 1871. [Google Scholar] [CrossRef]
- Lauer, J.; Zhou, M.; Ye, S.; Menegas, W.; Schneider, S.; Nath, T.; Rahman, M.M.; Di Santo, V.; Soberanes, D.; Feng, G.; et al. Multi-animal pose estimation, identification and tracking with DeepLabCut. Nat. Methods 2022, 19, 496–504. [Google Scholar] [CrossRef] [PubMed]
- Fujimori, S.; Ishikawa, T.; Watanabe, H. Animal behavior classification using DeepLabCut. In Proceedings of the 2020 IEEE 9th Global Conference on Consumer Electronics (GCCE), Kobe, Japan, 13–16 October 2020; pp. 254–257. [Google Scholar] [CrossRef]
- Magaju, D.; Montgomery, J.; Franklin, P.; Baker, C.; Friedrich, H. Machine learning based assessment of small-bodied fish tracking to evaluate spoiler baffle fish passage design. J. Environ. Manag. 2023, 325, 116507. [Google Scholar] [CrossRef] [PubMed]
- Aiken, D. The Biology of the Lobster Homarus Americanus; Factor, J.R., Ed.; Academic Press: New York, NY, USA, 1995; 528p. [Google Scholar]
- Tremblay, M.J. Molt Timing and Growth of the Lobster, Homarus americanus, off Northeastern Cape Breton Island, Nova Scotia. J. Shellfish. Res. 1997, 16, 383–394. [Google Scholar]
- Guo, Y.; Chen, S.; Zhan, R.; Wang, W.; Zhang, J. Sar ship detection based on yolov5 using cbam and bifpn. In Proceedings of the IGARSS 2022-2022 IEEE International Geoscience and Remote Sensing Symposium, Kuala Lumpur, Malaysia, 17–22 July 2022; pp. 2147–2150. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Size (MB) | Precision | Recall | mAP@0.5 | F1-Score | Parameters |
|---|---|---|---|---|---|---|
| Yolov5s | 14.4 | 96.2 | 96.9 | 95.9 | 95.8 | 7.03 × 106 |
| Yolov5m | 42.2 | 96.8 | 95.7 | 94.2 | 93.4 | 2.09 × 107 |
| Yolov5l | 92.8 | 98.1 | 96.9 | 98.7 | 95.6 | 4.61 × 107 |
| Model | Size (MB) | Precision | Recall | mAP@0.5 | F1-Score | Parameters |
|---|---|---|---|---|---|---|
| Yolov5s | 14.4 | 96.2 | 96.9 | 95.9 | 95.8 | 7.03 × 106 |
| Yolov5s-Bi-FPN | 15.5 | 89.1 | 87.6 | 85.35 | 88.7 | 7.03 × 106 |
| Yolov5s-SE | 14.8 | 94.9 | 95.1 | 95.2 | 95.6 | 7.23 × 106 |
| Yolov5s-CBAM | 14.8 | 97.2 | 96.5 | 96.3 | 96.6 | 7.23 × 106 |
| Model | Size (MB) | Precision | Recall | mAP@0.5 | F1-Score |
|---|---|---|---|---|---|
| Yolov5s | 14.4 | 96.2 | 96.9 | 95.9 | 95.8 |
| Yolov5s-CBAM | 14.8 | 97.2 | 96.5 | 96.3 | 96.6 |
| Yolov7 | 71.3 | 92.1 | 88.8 | 89.45 | 94.1 |
| No. of Lobster | GT Pixel of x | GT Pixel of y | Predicted Pixel of x | Predicted Pixel of y |
|---|---|---|---|---|
| Lobster 1 | 1416 | 233 | 1416.9818 | 233.15489 |
| Lobster 2 | 1254 | 389 | 1254.26277 | 389.868271 |
| Lobster 3 | 1412 | 594 | 1414.0636 | 593.483347 |
| Lobster 4 | 1269 | 630 | 1269.84922 | 630.760071 |
| Lobster 5 | 1237 | 361 | 1237.95861 | 361.441697 |
| Lobster 6 | 1244 | 369 | 1245.27473 | 370.97373 |
| Lobster 7 | 1001 | 667 | 1001.21166 | 700.347138 |
| Lobster 8 | 1190 | 336 | 1190.4577 | 336.008819 |
| Lobster 9 | 420 | 1255 | 420.716797 | 1255.80385 |
| Lobster 10 | 669 | 1005 | 669.498929 | 1005.50592 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Natesan, B.; Liu, C.-M.; Ta, V.-D.; Liao, R. Advanced Robotic System with Keypoint Extraction and YOLOv5 Object Detection Algorithm for Precise Livestock Monitoring. Fishes 2023, 8, 524. https://doi.org/10.3390/fishes8100524
Natesan B, Liu C-M, Ta V-D, Liao R. Advanced Robotic System with Keypoint Extraction and YOLOv5 Object Detection Algorithm for Precise Livestock Monitoring. Fishes. 2023; 8(10):524. https://doi.org/10.3390/fishes8100524
Chicago/Turabian StyleNatesan, Balaji, Chuan-Ming Liu, Van-Dai Ta, and Raymond Liao. 2023. "Advanced Robotic System with Keypoint Extraction and YOLOv5 Object Detection Algorithm for Precise Livestock Monitoring" Fishes 8, no. 10: 524. https://doi.org/10.3390/fishes8100524
APA StyleNatesan, B., Liu, C.-M., Ta, V.-D., & Liao, R. (2023). Advanced Robotic System with Keypoint Extraction and YOLOv5 Object Detection Algorithm for Precise Livestock Monitoring. Fishes, 8(10), 524. https://doi.org/10.3390/fishes8100524