
Fast Segmentation of Vertebrae CT Image Based on the SNIC Algorithm

Abstract
:1. Introduction
2. Related Works
2.1. Traditional Segmentation Algorithm
2.2. Superpixel Segmentation Algorithm
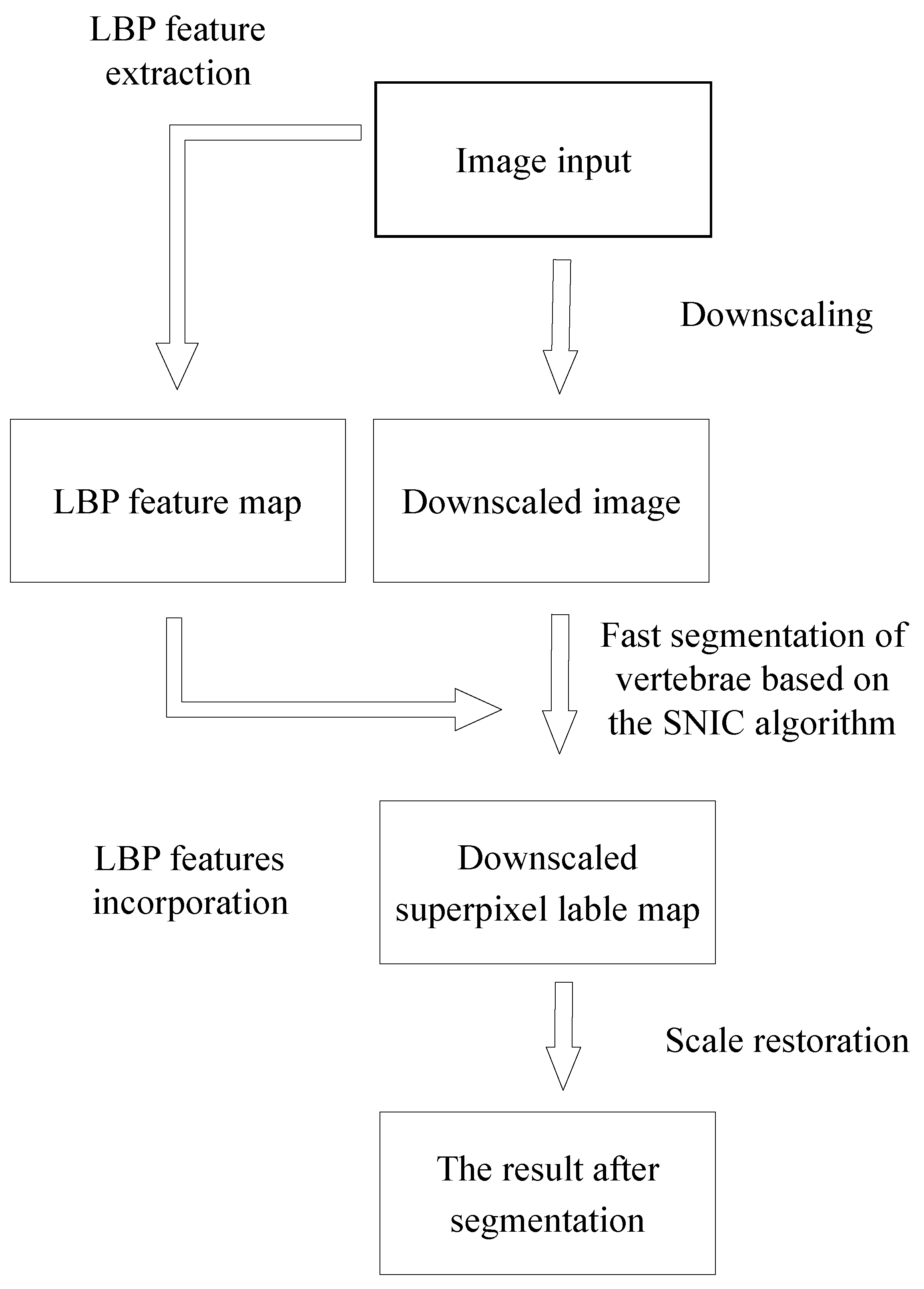
3. Materials and Methods
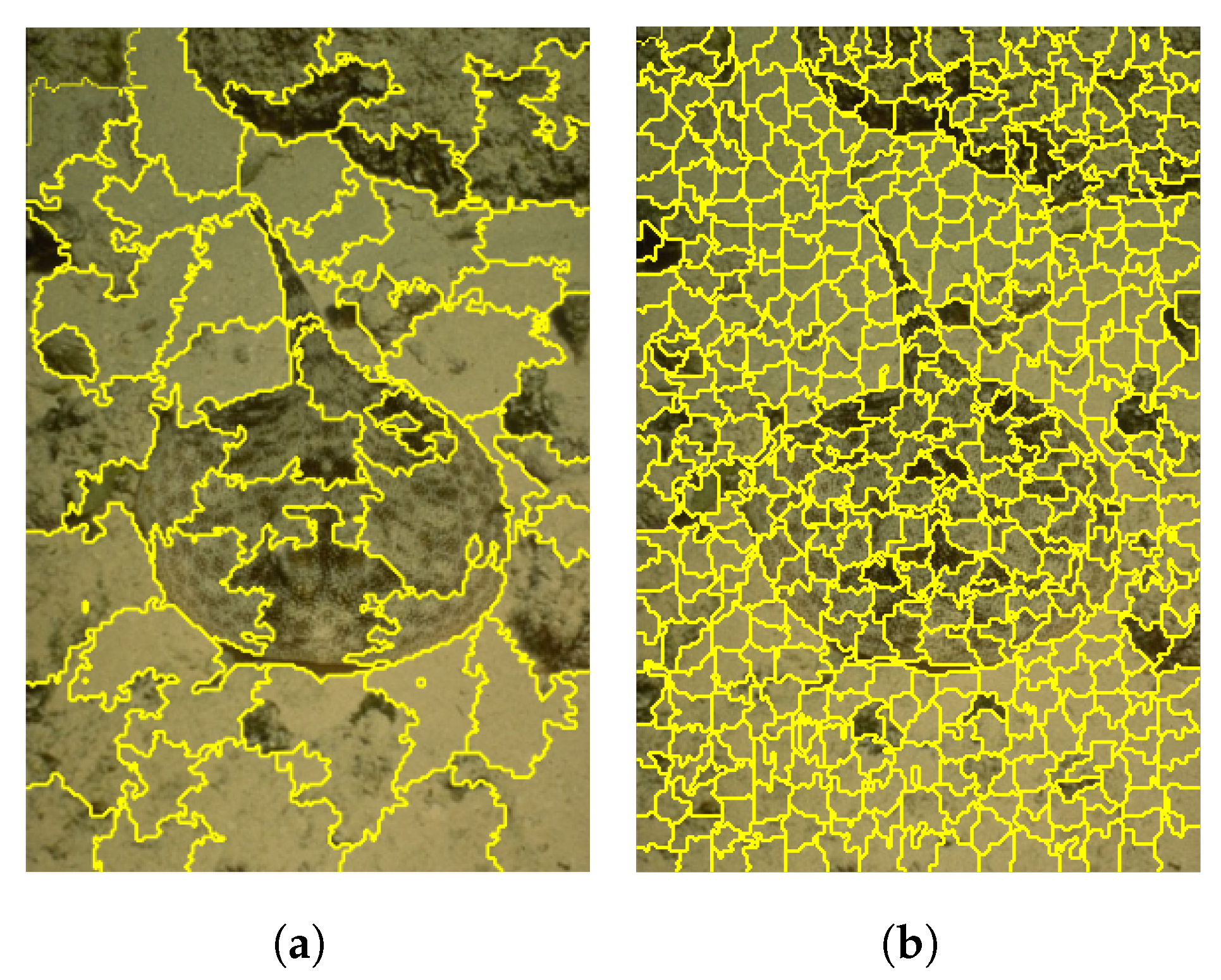
3.1. The SNIC Superpixels Algorithm
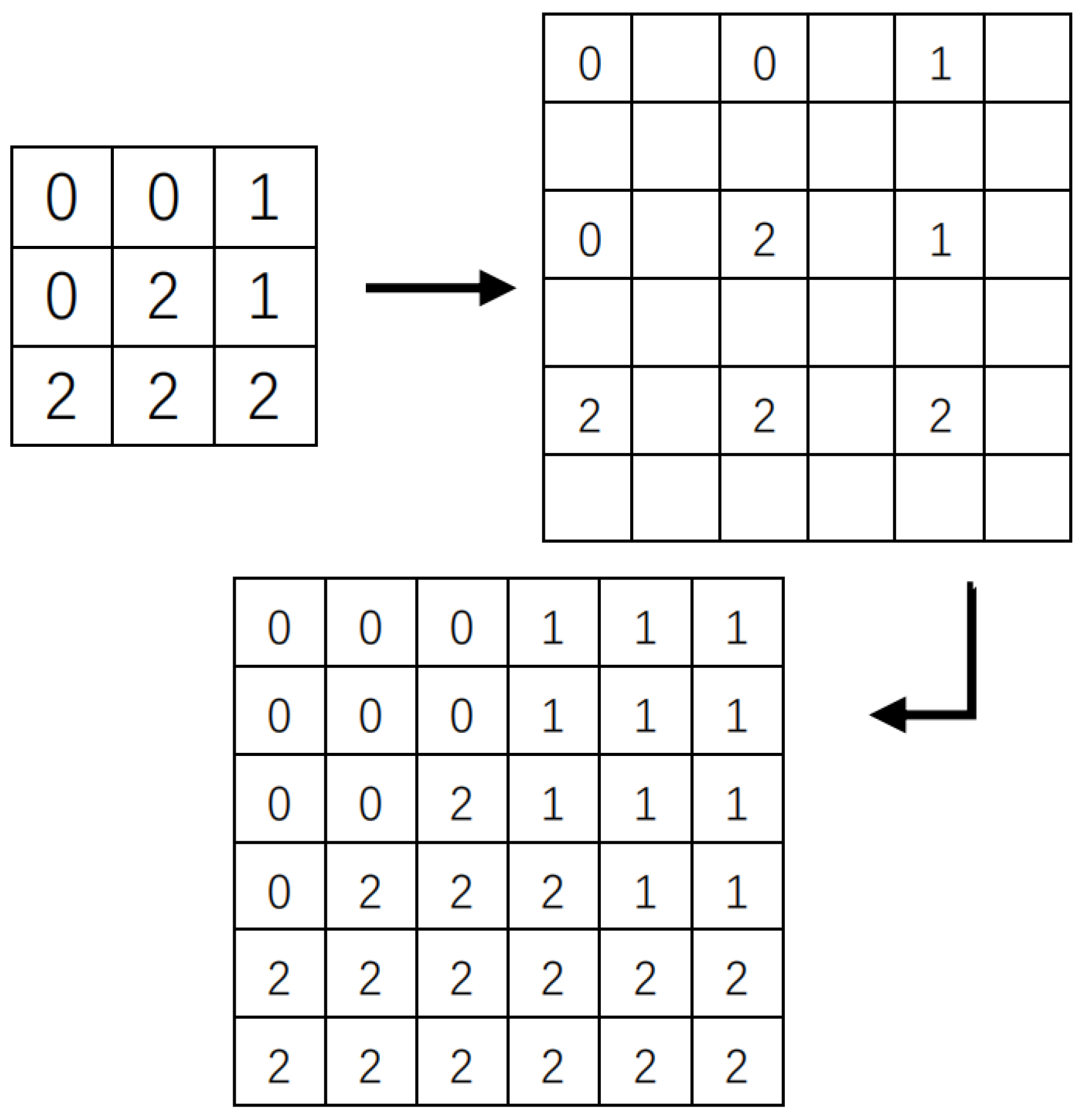
3.2. The Scale Transform
- 1.
- Superpixel segmentation is performed on the downscaling image with 1/4 pixels after removing the pixels of odd rows and odd columns;
- 2.
- Restored the labeled map to the original scale by using the KNN algorithm Figure 1, which based on the segmentation label map of the reduced scale image;
- 3.
- Complete the superpixel segmentation of the original image, by classifying the labels of the pixels in the original image according to the superpixel marking a map of the original scale.
3.3. Adaptive Parameters
3.4. Integrating Texture Information
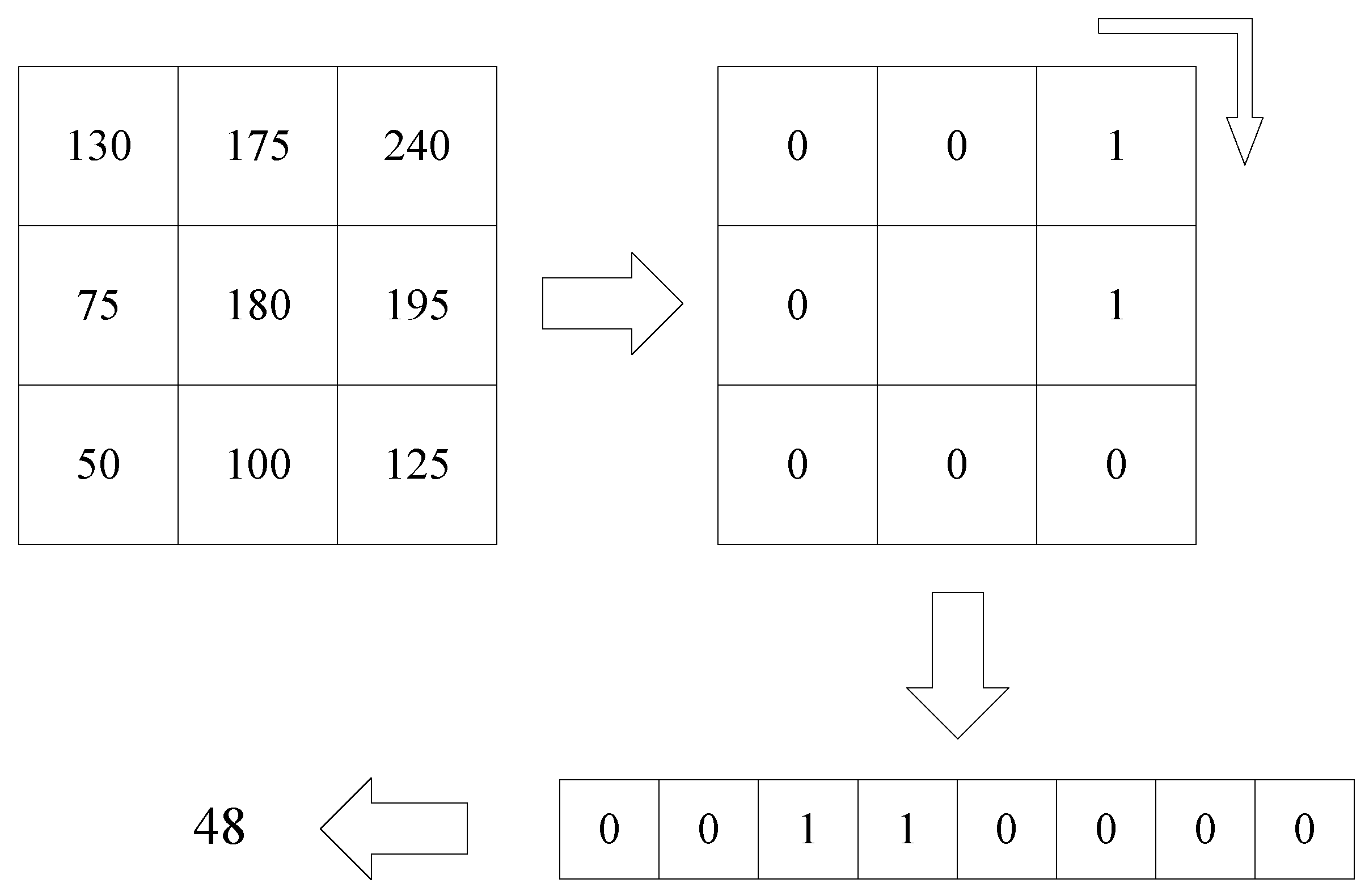
3.5. Improved SNIC Algorithm Steps
- 1.
- To obtain the feature map by extracting the image texture features, then reduce its scale;
- 2.
- Set the parameter t, the number of superpixels K, and distribute the seed point position on the downscaled image;
- 3.
- Create a blank label image L with the same size as the downscaled image, and initialize the priority queue Q with the element created by the seed point = {,,k, = {0,0,0,0,0};
- 4.
- Take out the smallest element of from Q. If it is not marked at the same position in the marked image L, which will be marked as K;
- 5.
- Calculate the average value of all pixels in the superpixel to update the center of the superpixel. Then, calculate and update the adaptive parameter m according to Equation (5);
- 6.
- Calculate for the unmarked pixels in the 4 or 8 neighbors according to Equations (8) and (9). Create a new element and assign the label k, and fill it in Q;
- 7.
- If Q is non-empty, switch to Step4, otherwise switch to Step8;
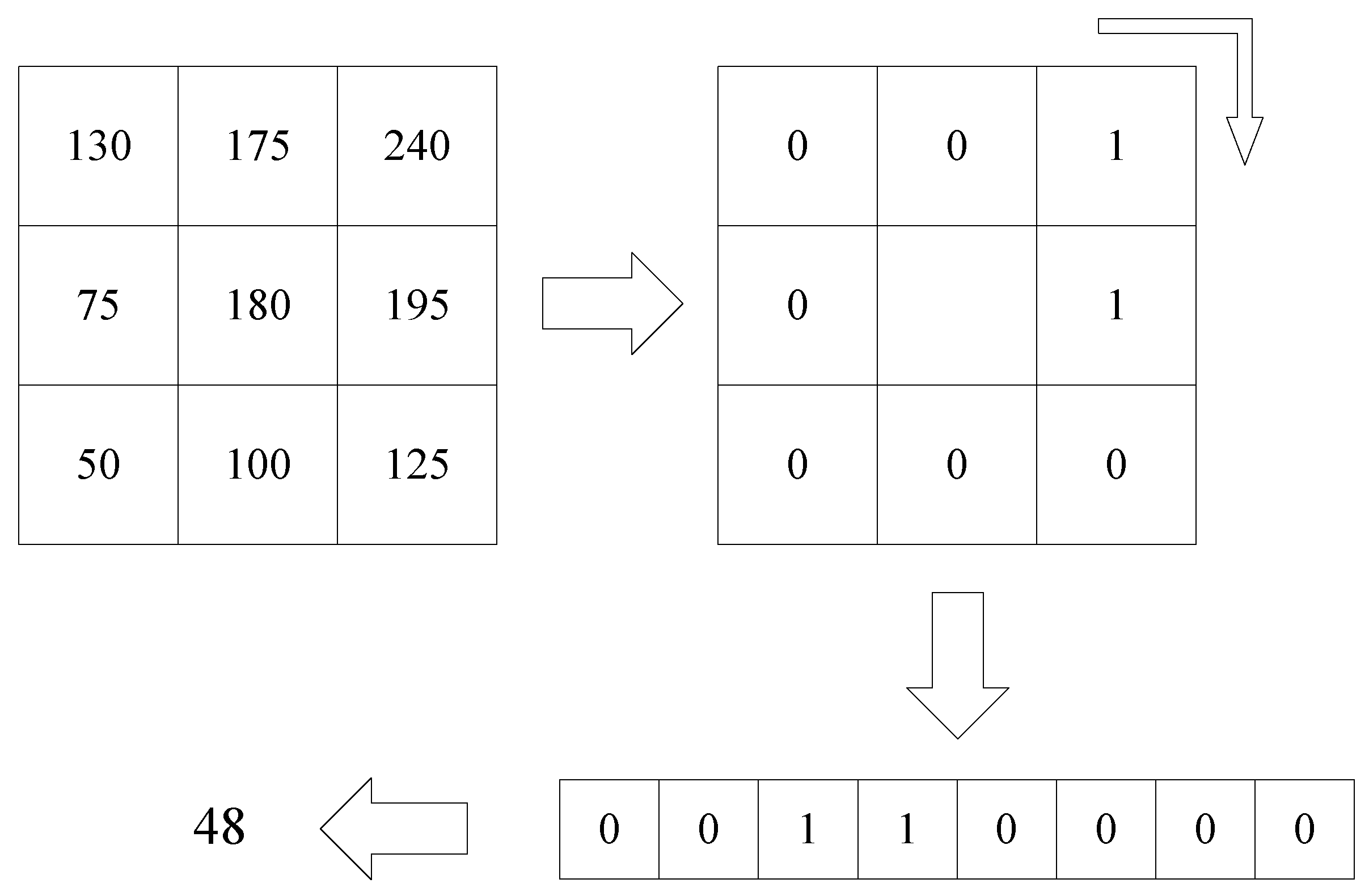
- 8.
- Obtain the segmentation results by restoring the labeled map L to the original scale, with the KNN algorithm shown in Figure 1.
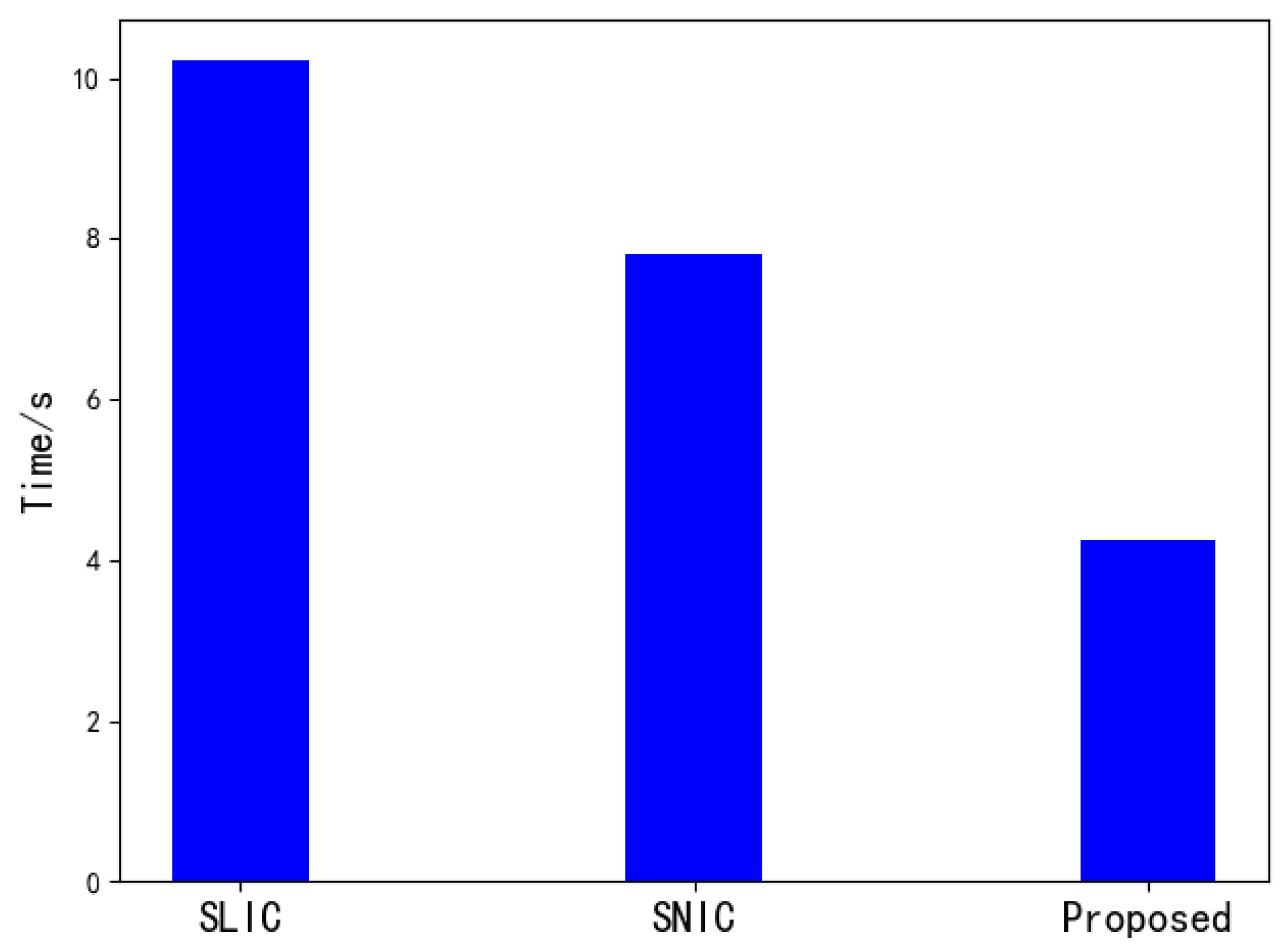
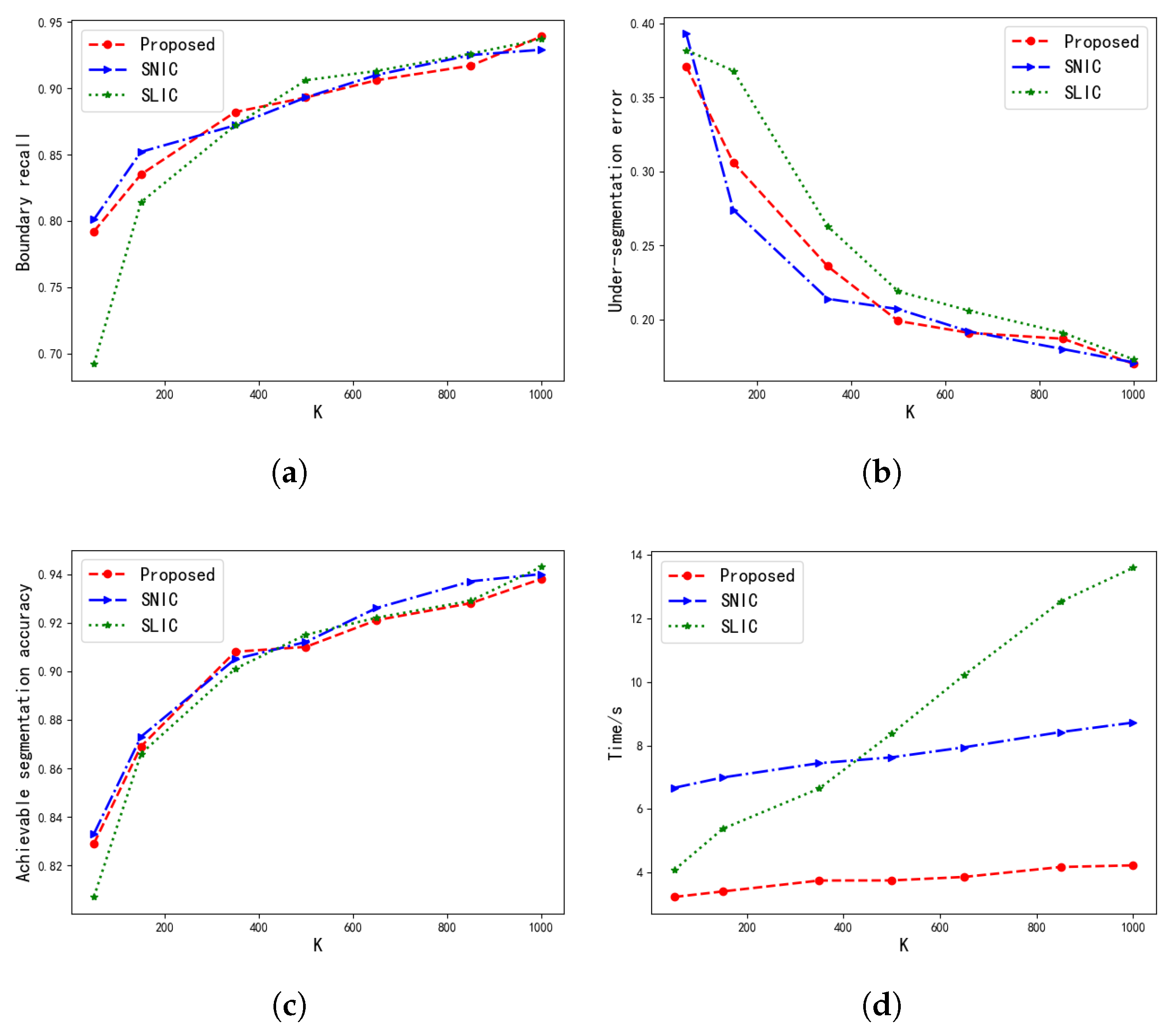
4. Experiments
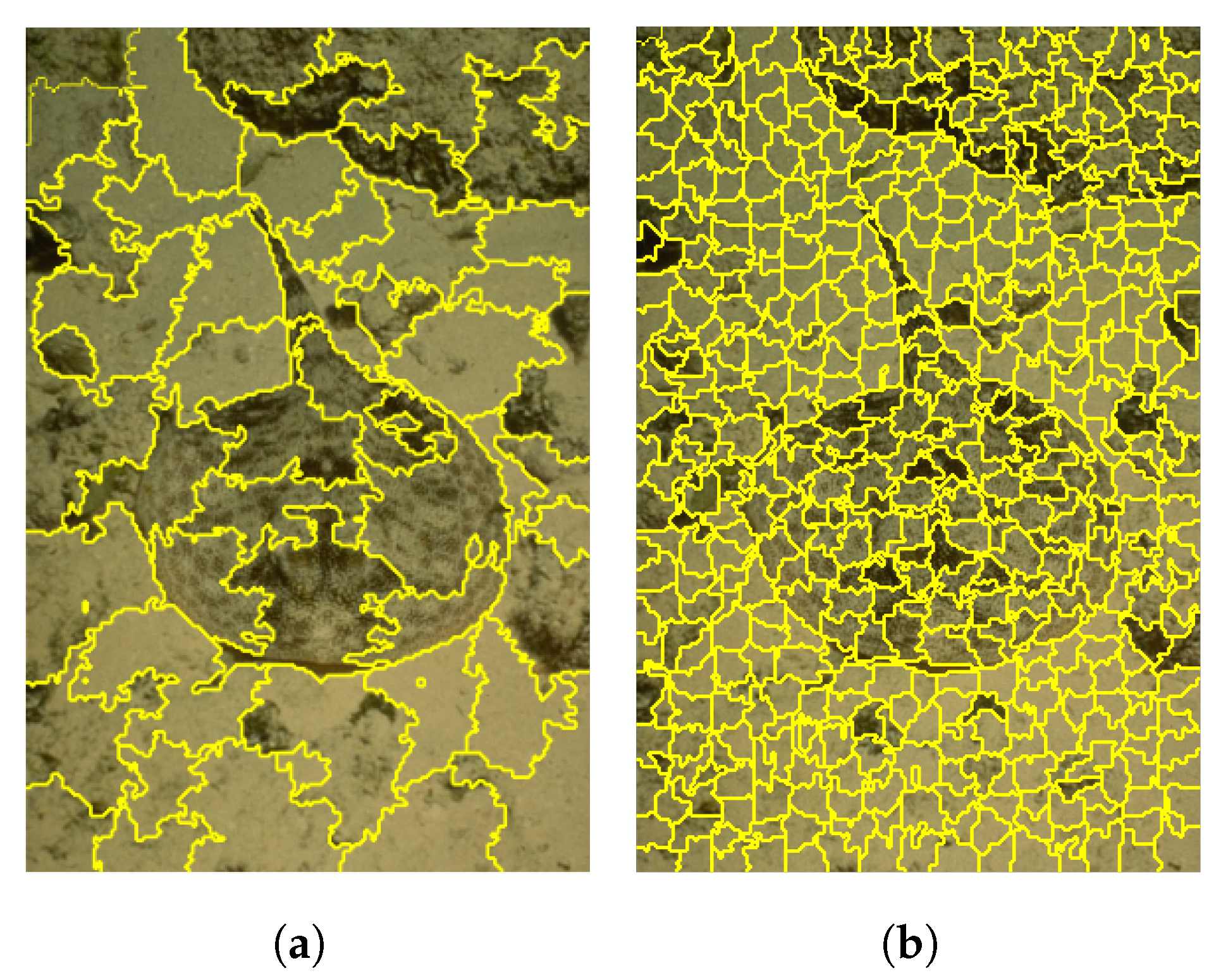
4.1. Exploration of the Feasibility and Effectiveness of the Proposed Method
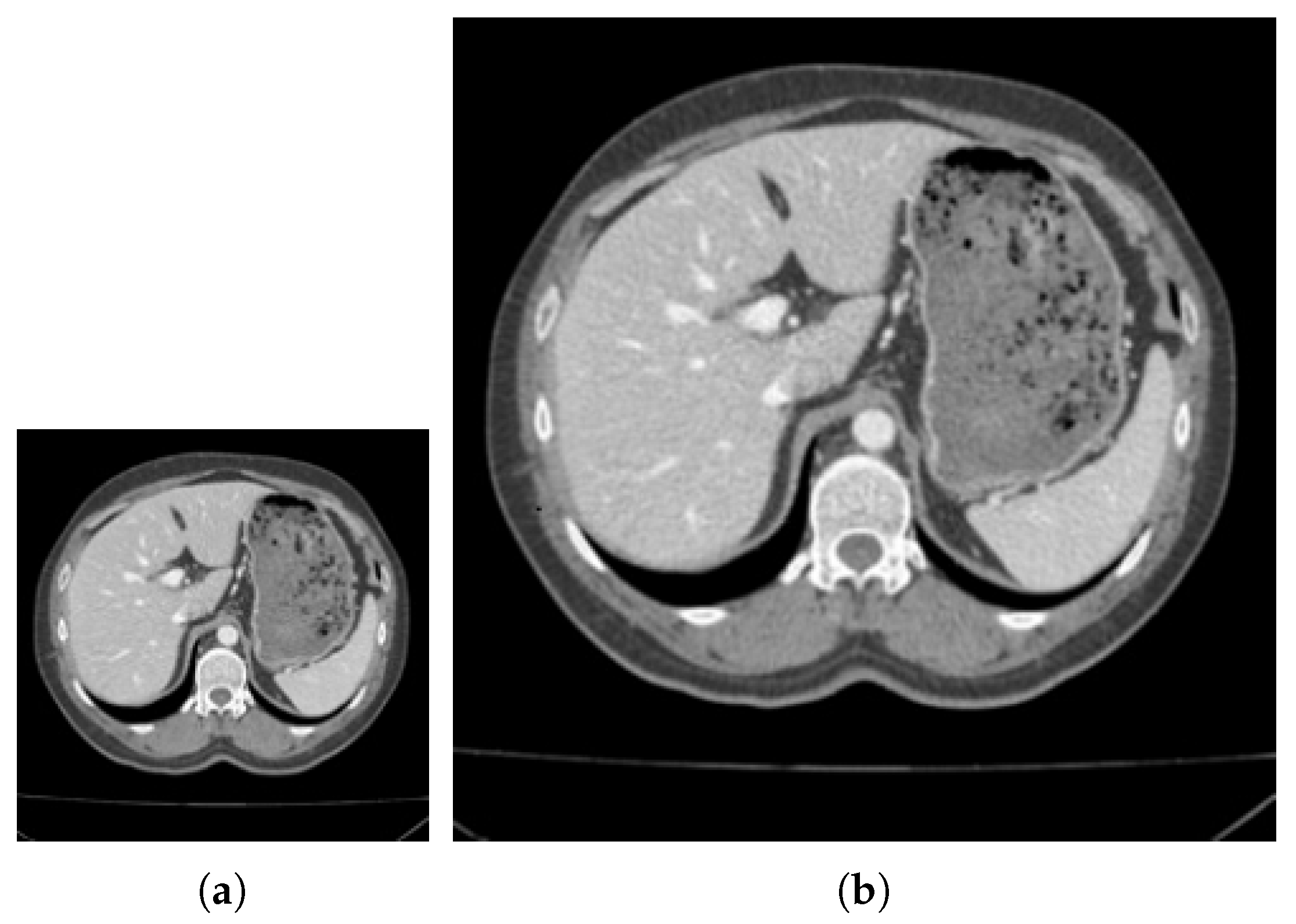
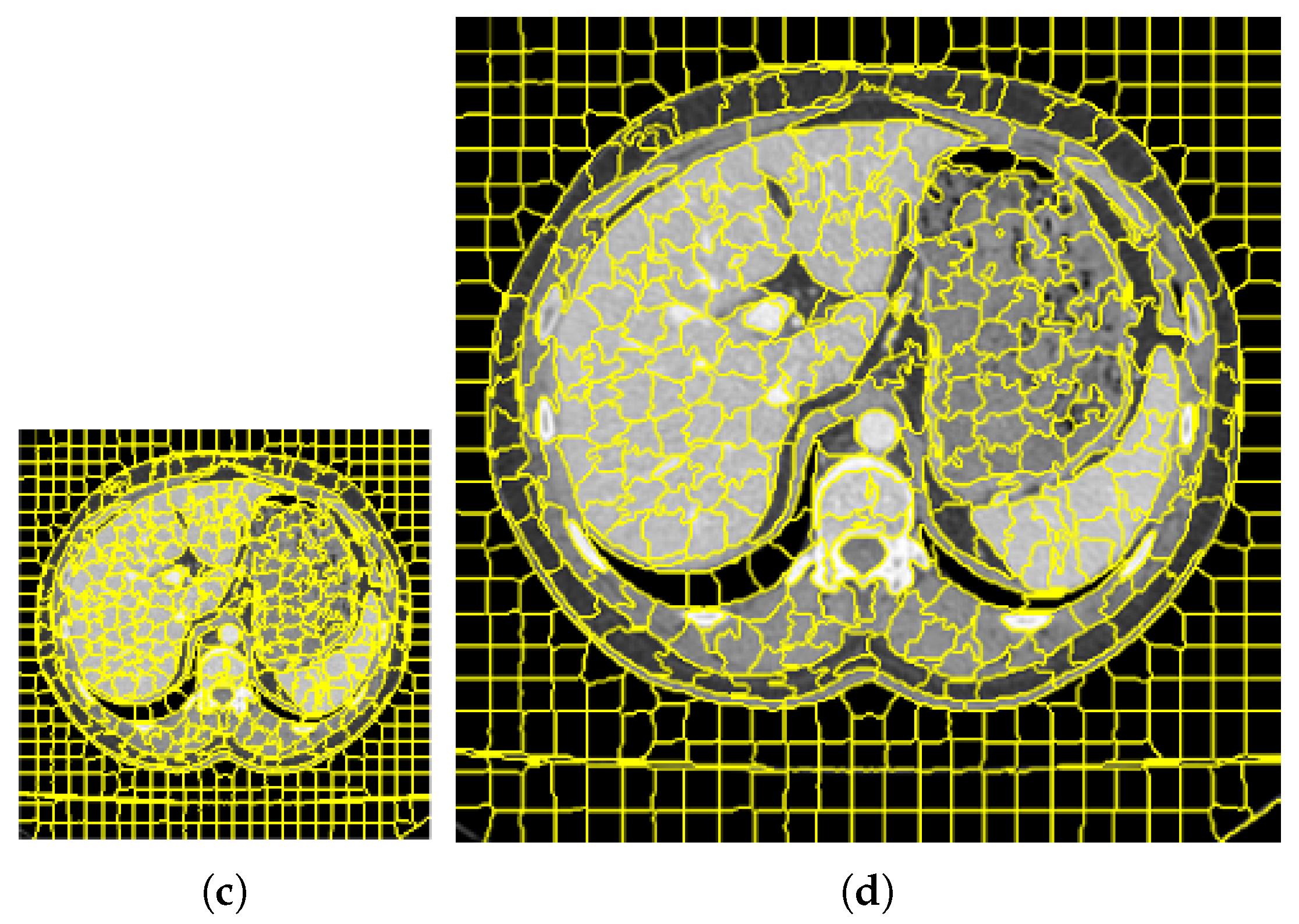
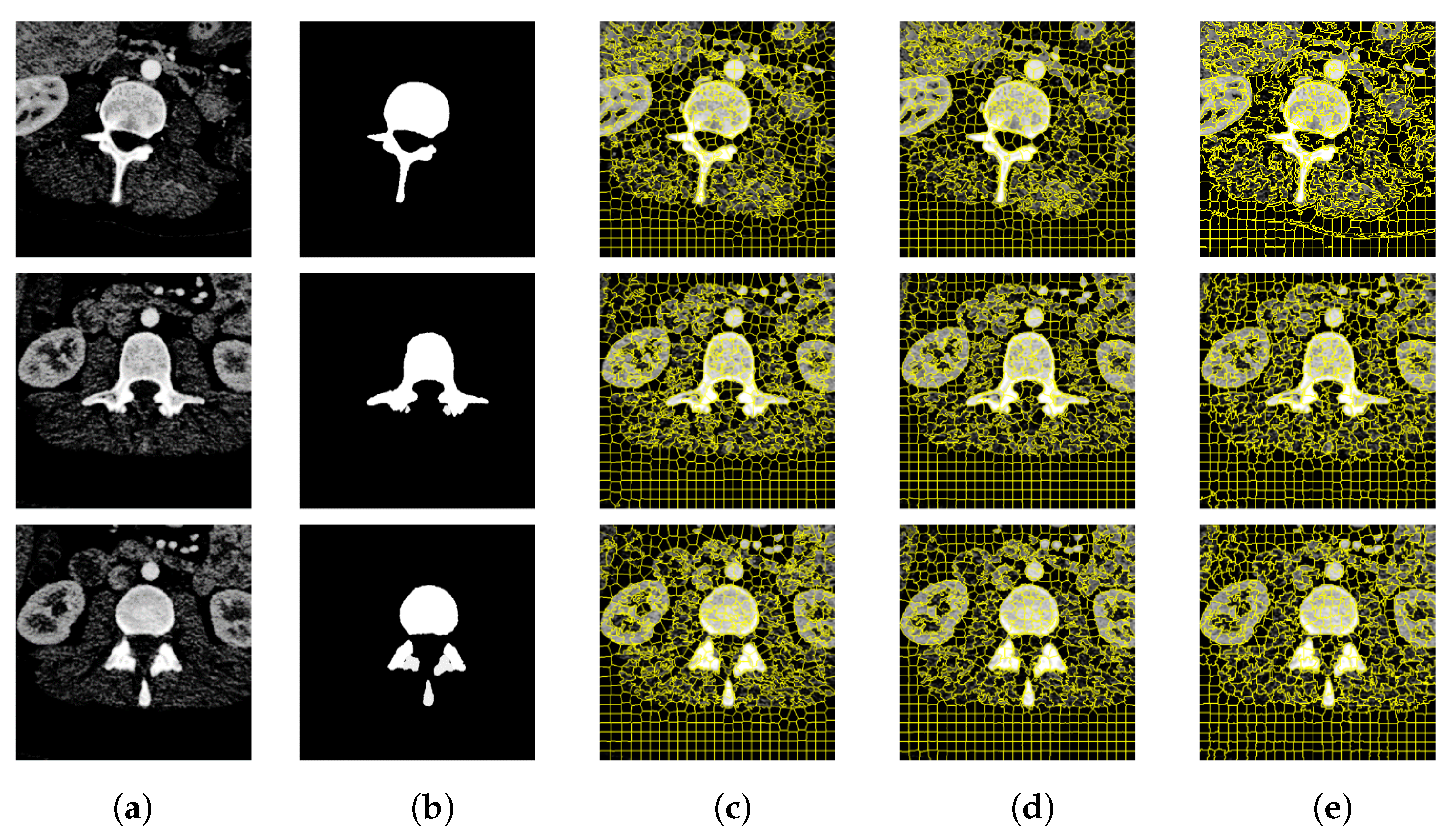
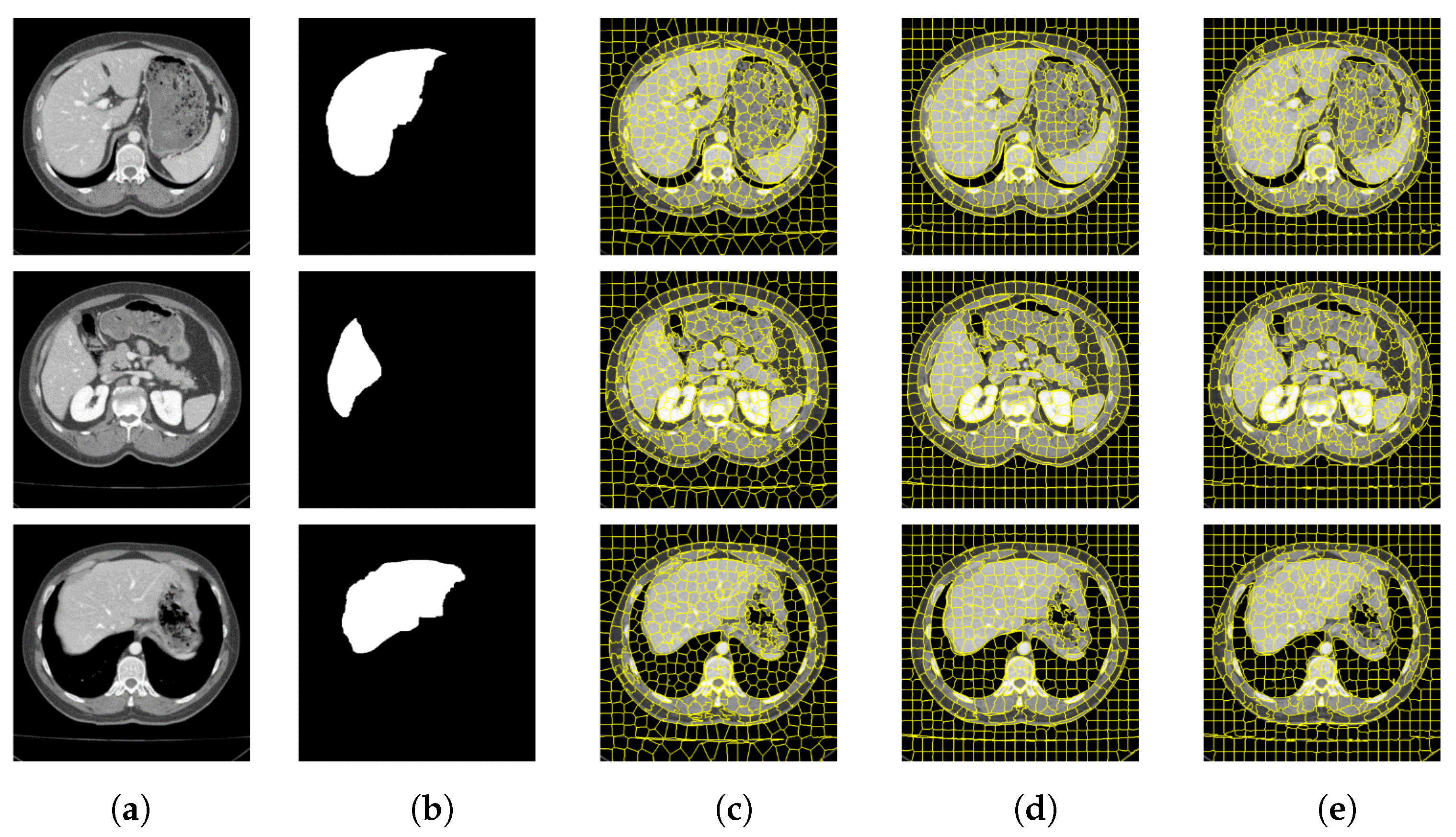
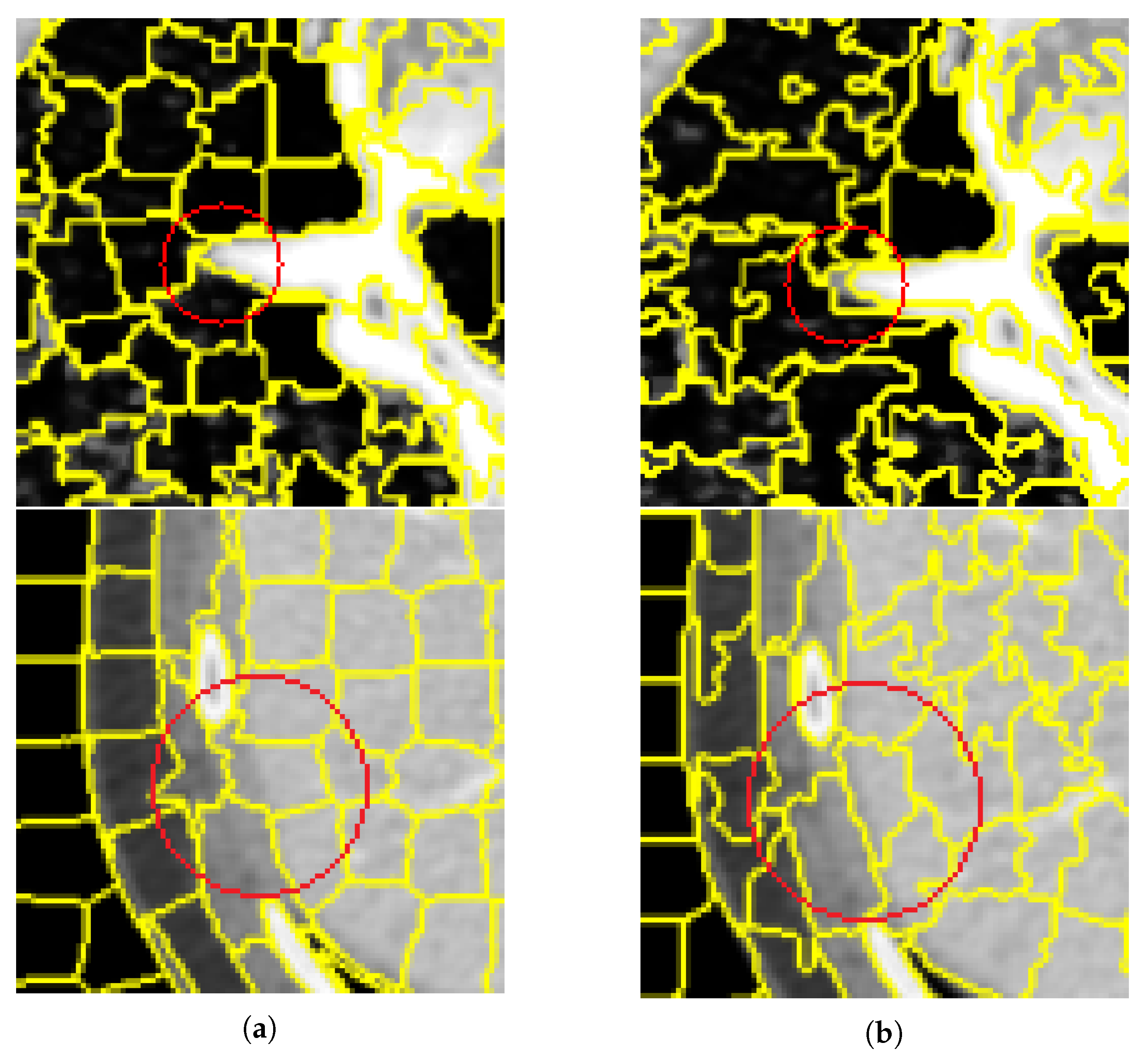
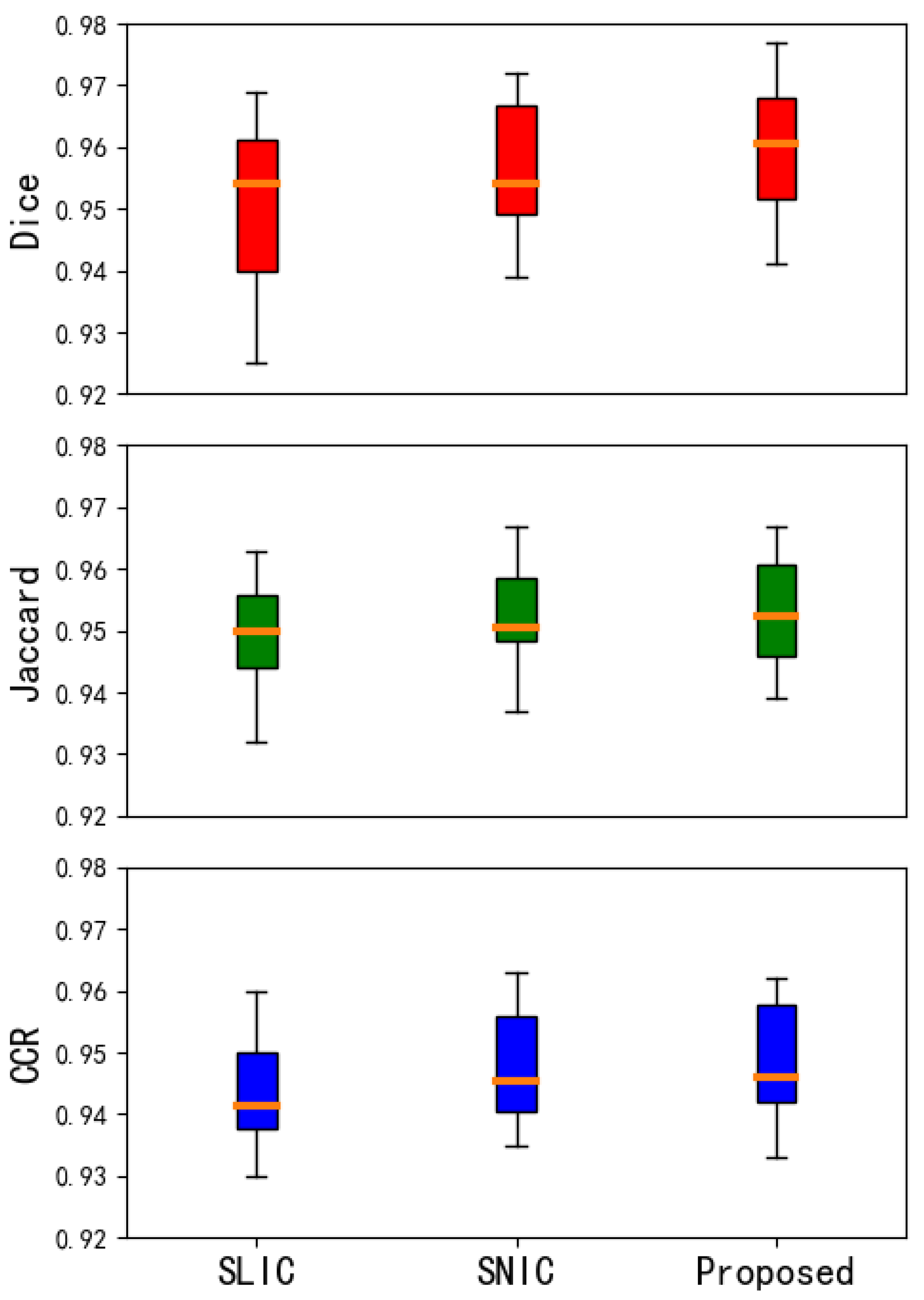
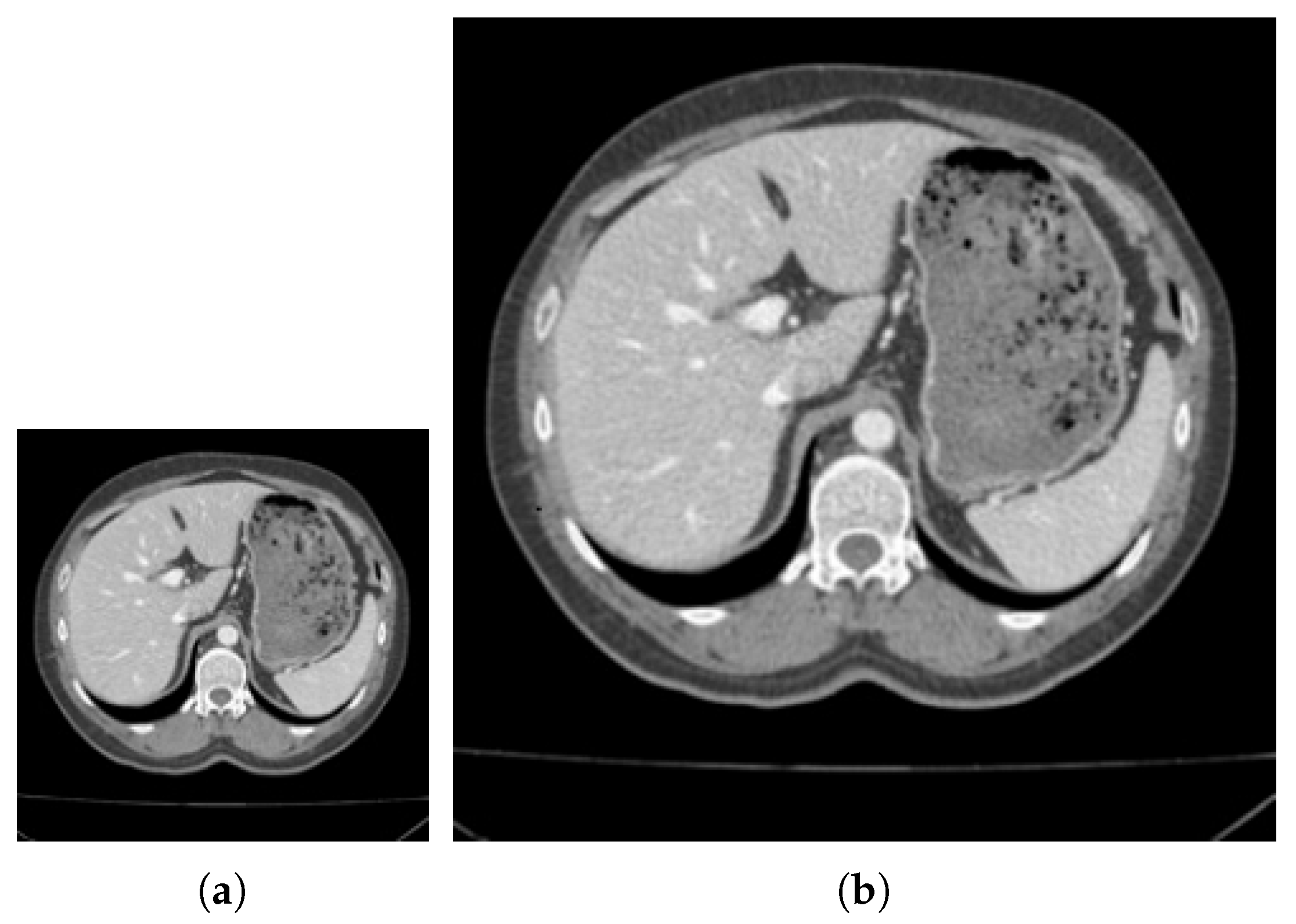
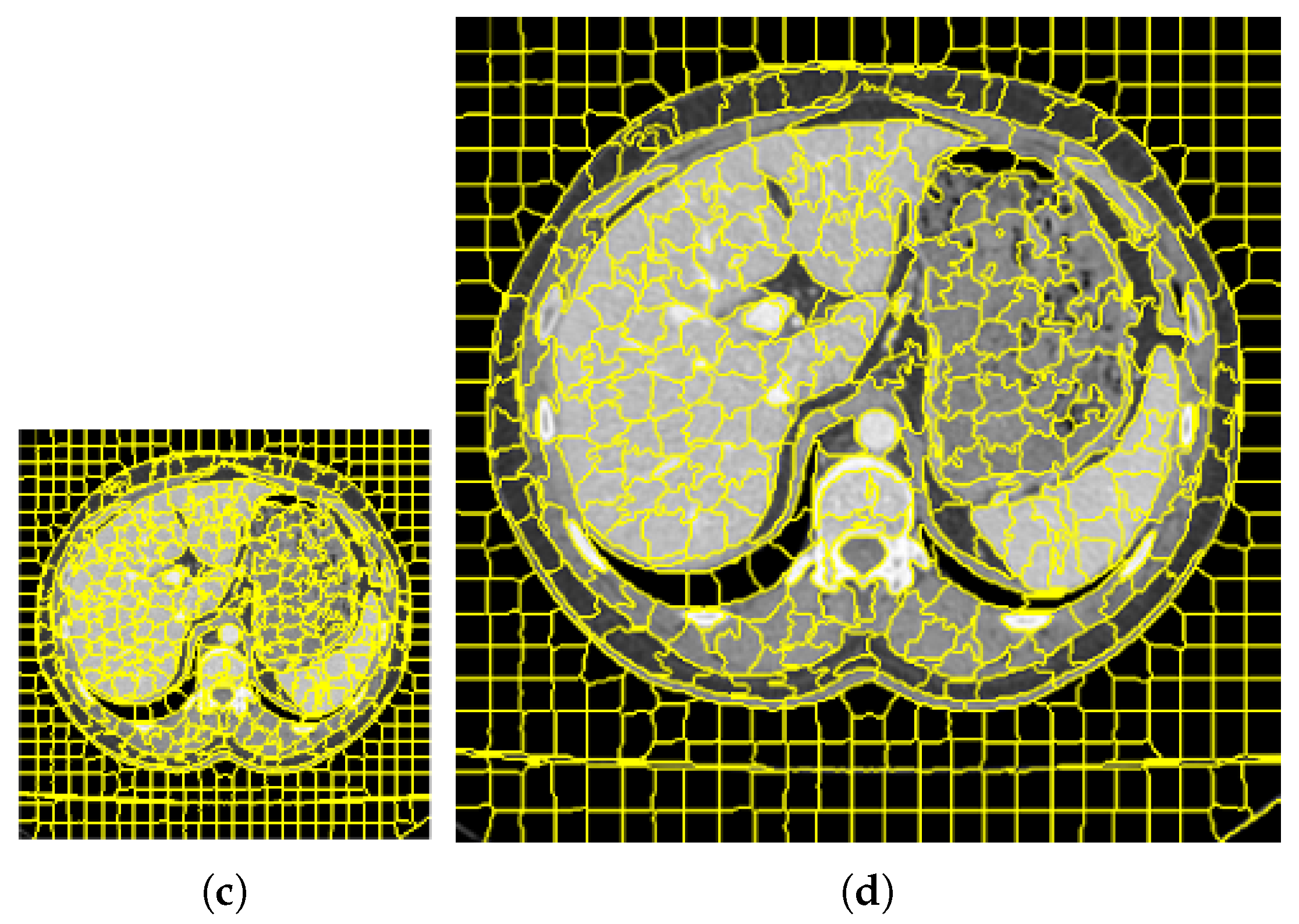
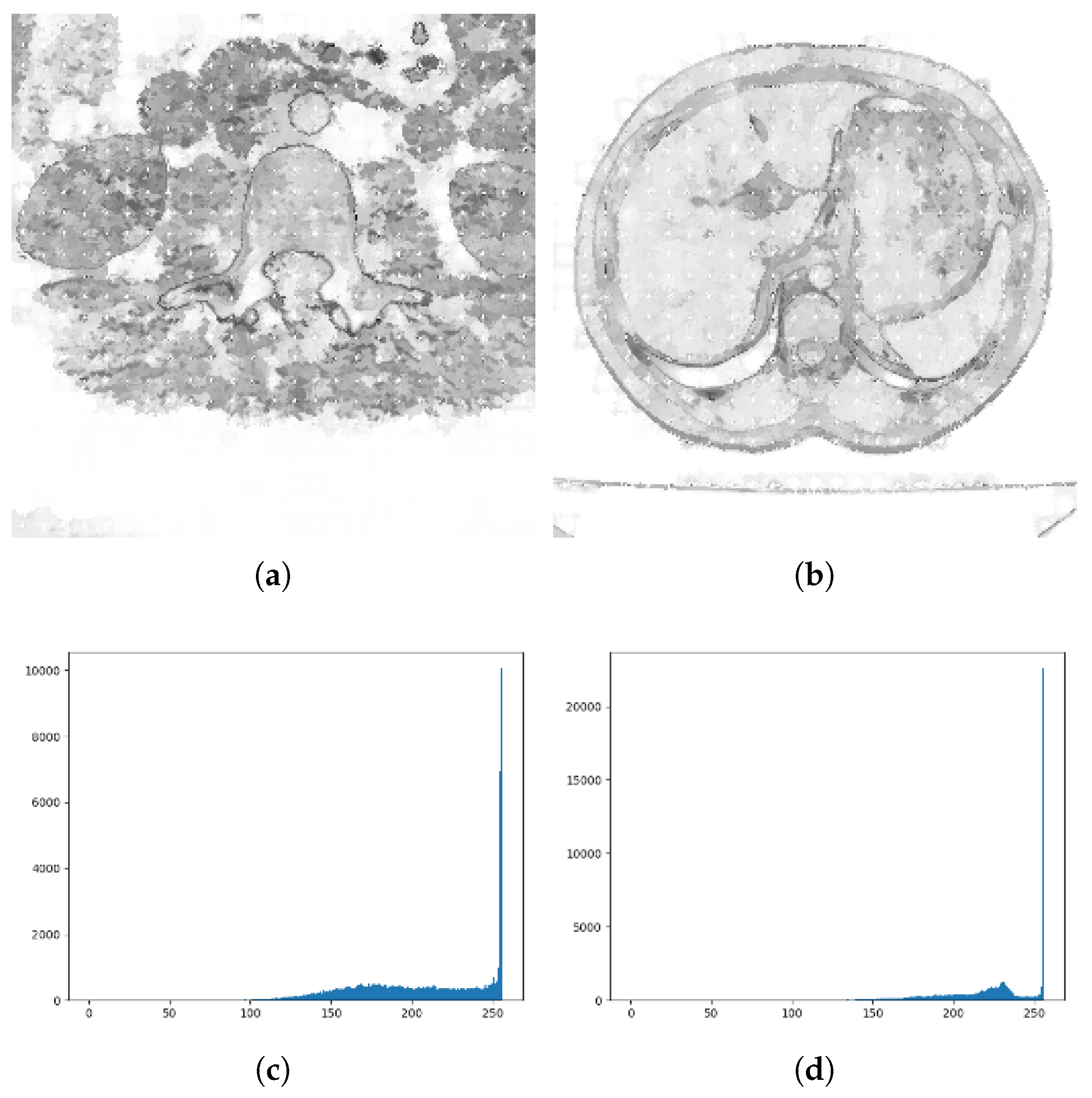
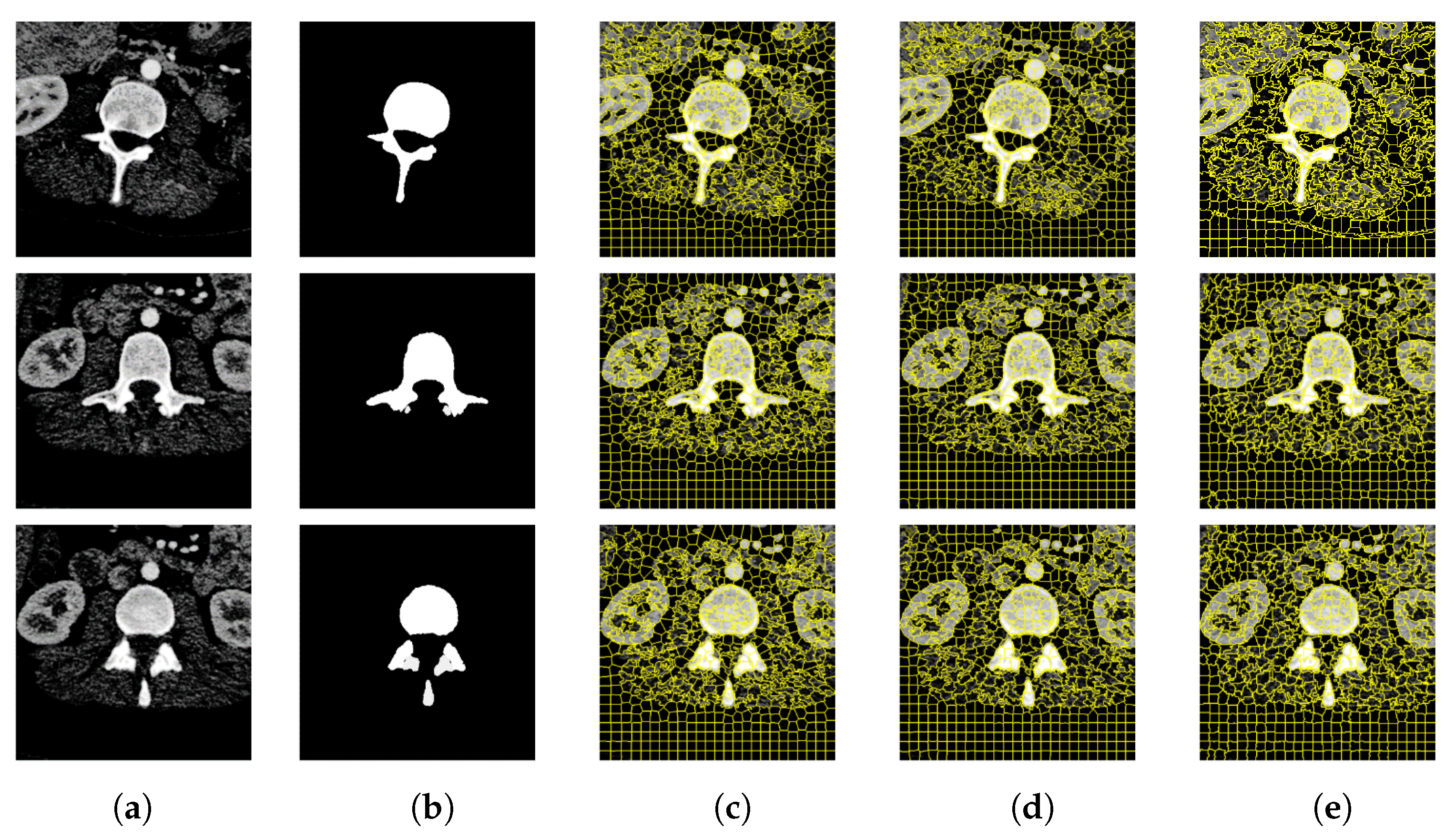
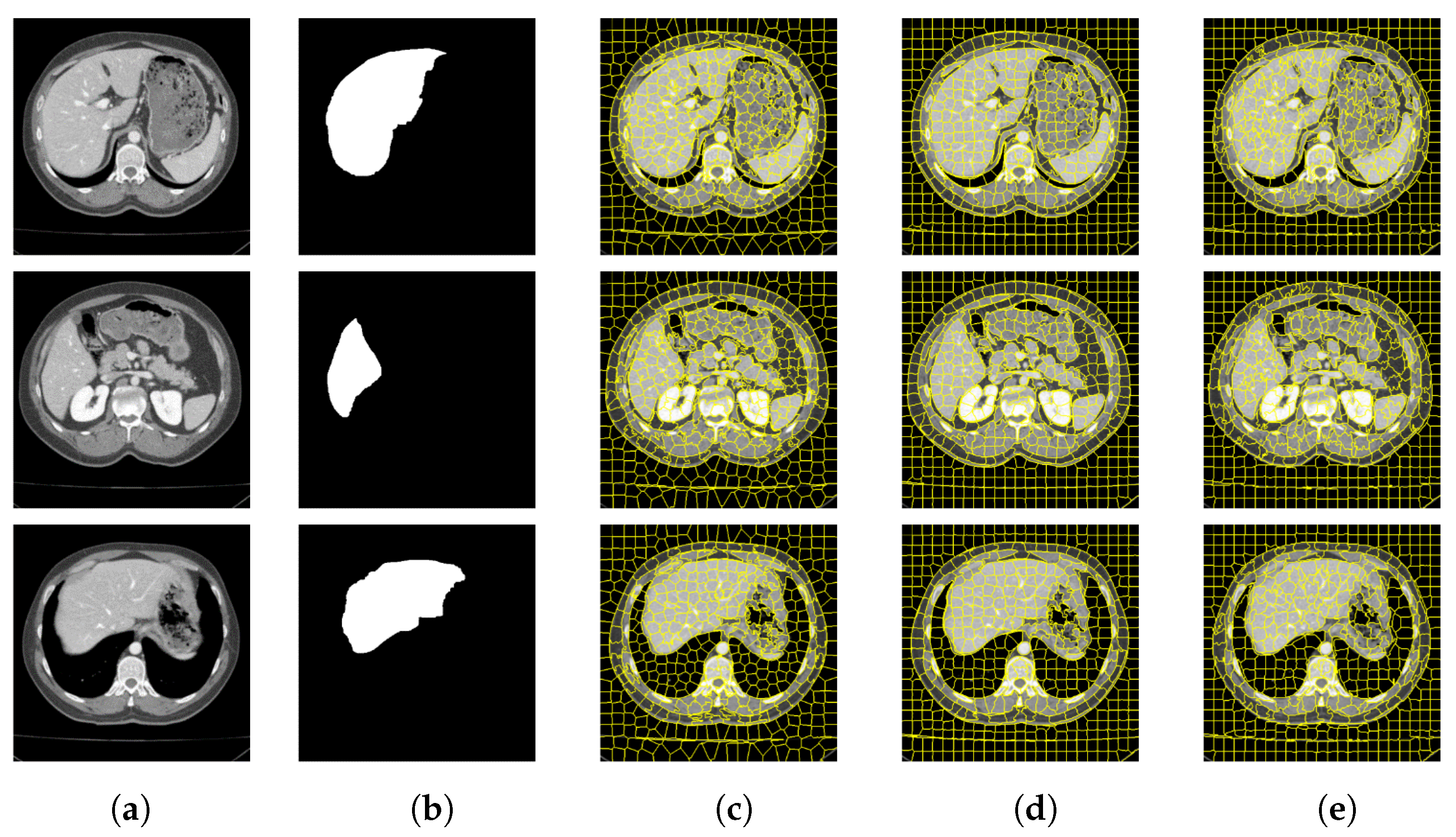
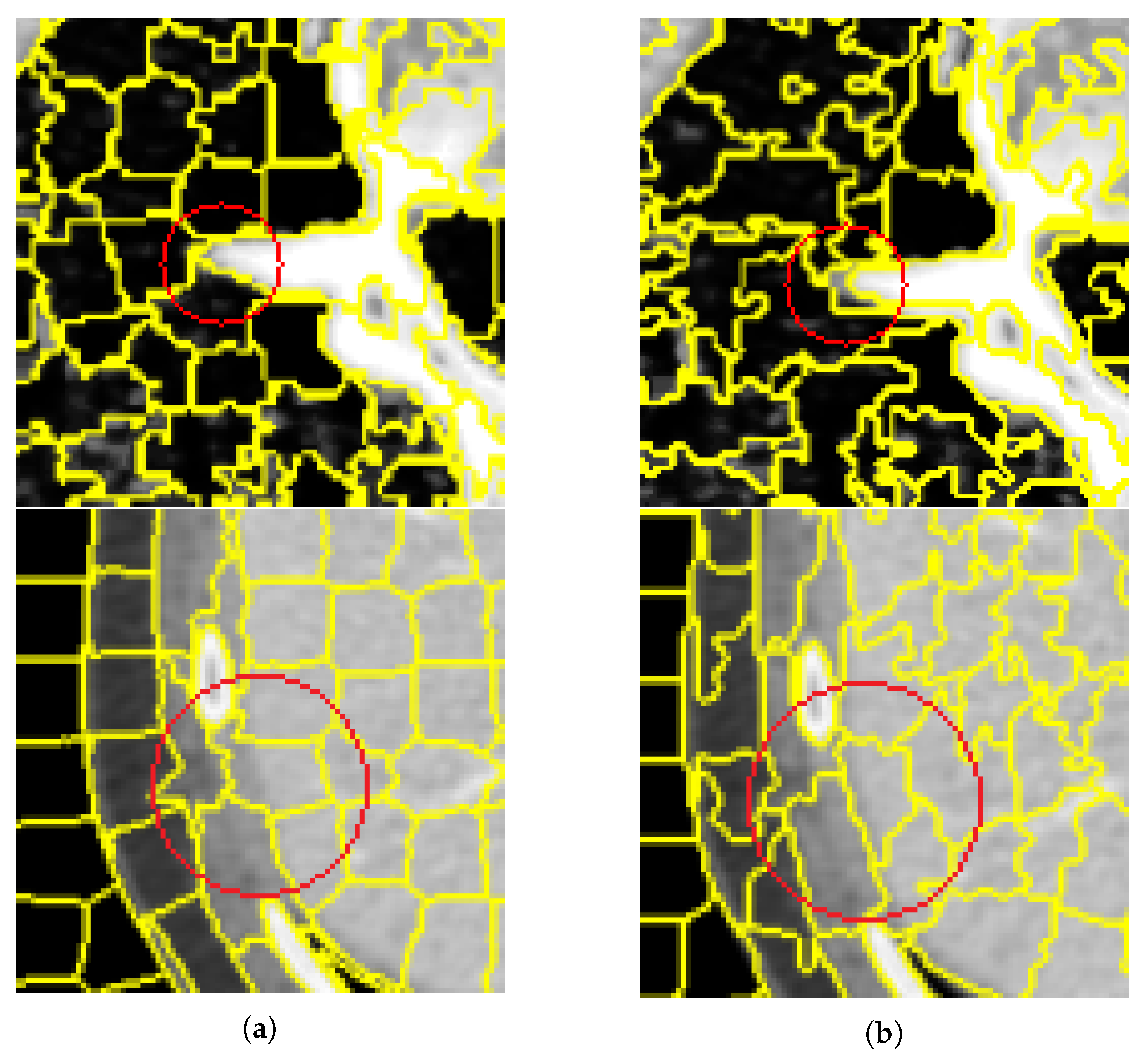
4.2. Verification of Medical CT Images with Proposed Method
4.3. The Experimental Environment and Data Set
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| SSIM | Structural Similarity Index Measure |
| SI | Similarity Index |
| KNN | k-NearestNeighbor |
| SLIC | Simple Linear Iterative Cluster |
| SNIC | Simple Non-Iterative Clustering |
| LBP | Local binary pattern |
| BR | Boundary Recall |
| USE | Under-Segmentation Error |
| ASA | Achievable Segmentation Accuracy |
| SEG | the result of automatic algorithm Segmentation |
| GT | Ground Truth |
| CT | Computed Tomography |
| CCR | Correct Classification Ration |
References
- Jiang, Q.; Zhang, C.; Li, L.; Xu, W.; Wang, X. Segmentation of thyroid nodules based on CV model and DRLSE model. J. Chang. Univ. Technol. 2017, 38, 442–446. [Google Scholar]
- Rehman, F.; Shah, S.A.; Riaz, M.N.; Gilani, S.O.; Faiza, R. A Region-Based Deep Level Set Formulation for Vertebral Bone Segmentation of Osteoporotic Fractures. J. Digit. Imaging 2019, 33, 191–203. [Google Scholar] [CrossRef] [PubMed]
- Chondro, P.; Yao, C.; Ruan, S.J.; Li, C. Low order adaptive region growing for lung segmentation on plain chest radiographs. Neurocomputing 2018, 275, 1002–1011. [Google Scholar] [CrossRef]
- Guerrout, E.H.; Mahiou, R.; Michelucci, D.; Randa, B.; Assia, O. Hidden markov random fields and cuckoo search method for medical image segmentation. arXiv 2020, arXiv:2005.09377. [Google Scholar]
- Mostafa, A.; Hassanien, A.E.; Houseni, M.; Hefny, H. Liver segmentation in MRI images based on whale optimization algorithm. Multimed. Tools Appl. 2017, 76, 24931–24954. [Google Scholar] [CrossRef]
- Luo, X.; Lü, J.; Peng, Z. Recent Research Progress of Superpixel Segmentation and Evaluation. Laser Optoelectron. Prog. 2019, 56, 45–55. [Google Scholar]
- Zhang, S.; You, Z.; Wu, X. Plant disease leaf image segmentation based on superpixel clustering and EM algorithm. Neural Comput. Appl. 2017, 31, 1225–1232. [Google Scholar] [CrossRef]
- Jia, S.; Deng, X.; Zhu, J.; Xu, M.; Zhou, J.; Jia, X. Collaborative Representation-Based Multiscale Superpixel Fusion for Hyperspectral Image Classification. IEEE Trans. Geosci. Remote Sens. 2019, 57, 7770–7784. [Google Scholar] [CrossRef]
- Ren, X.; Malik, J. Learning a classification model for segmentation. In Proceedings of the Ninth IEEE International Conference on Computer Vision, Nice, France, 13–16 October 2003. [Google Scholar]
- Song, X.; Zhou, L.; Li, Z.; Chen, J.; Lei, Y. Review on superpixel methods in image segmentation. J. Image Graph. 2015, 20, 599–608. [Google Scholar]
- Wang, C.; Chen, J.; Li, W. Review on superpixel segmentation algorithms. Appl. Res. Comput. 2014, 31, 6–12. [Google Scholar]
- Achanta, R.; Shaji, A.; Smith, K.; Lucchi, A.; Fua, P.; Süsstrunk, S. SLIC Superpixels Compared to State-of-the-Art Superpixel Methods. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 2274–2282. [Google Scholar] [PubMed] [Green Version]
- Shen, J.; Hao, X.; Liang, Z.; Liu, Y.; Wang, W.; Shao, L. Real-Time Superpixel Segmentation by DBSCAN Clustering Algorithm. IEEE Trans. Image Process 2016, 25, 5933–5942. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhao, J.; Bo, R.; Hou, Q.; Cheng, M.M.; Rosin, P. FLIC: Fast linear iterative clustering with active search. Comput. Vis. Media 2018, 4, 49–64. [Google Scholar] [CrossRef] [Green Version]
- Fang, Z.; Yu, X.; Wu, C.; Chen, D.; Jia, T. Superpixel Segmentation Using Weighted Coplanar Feature Clustering on RGBD Images. Appl. Sci. 2018, 8, 902. [Google Scholar]
- Achanta, R.; Susstrunk, S. Superpixels and polygons using simple non-iterative clustering. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 4651–4660. [Google Scholar]
- Li, C.; Guo, B.; Wang, G.; Zheng, Y.; Liu, Y.; He, W. NICE: Superpixel segmentation using non-iterative clustering with efficiency. Appl. Sci. 2020, 10, 4415. [Google Scholar] [CrossRef]
- Achanta, R.; Márquez-Neila, P.; Fua, P.; Süsstrunk, S. Scale-adaptive superpixels. In Proceedings of the Color and Imaging Conference. Society for Imaging Science and Technology, Vancouver, BC, Canada, 12–16 November 2018; Volume 2018, pp. 1–6. [Google Scholar]
- Xie, X.; Xie, G.; Xu, X.; Cui, L.; Ren, J. Automatic image segmentation with superpixels and image-level labels. IEEE Access 2019, 7, 10999–11009. [Google Scholar] [CrossRef]
- Senanayaka, J.; Morawaliyadda, D.; Senarath, S.; Godaliyadda, R.; Ekanayake, M. Adaptive Centroid Placement Based SNIC for Superpixel Segmentation. In Proceedings of the 2020 Moratuwa Engineering Research Conference (MERCon), Moratuwa, Sri Lanka, 28–30 July 2020; pp. 242–247. [Google Scholar]
- Qin, W.; Wu, J.; Han, F.; Yuan, Y.; Zhao, W.; Ibragimov, B.; Gu, J.; Xing, L. Superpixel-based and boundary-sensitive convolutional neural network for automated liver segmentation. Phys. Med. Biol. 2018, 63, 095017. [Google Scholar] [CrossRef]
- Tao, Y.P.; Jing, Y.; Xu, C. CT Image Segmentation Method Combining Superpixel and CNN. Comput. Eng. Appl. 2020, 56, 200–205. [Google Scholar]
- Wu, Y.; Zhao, Z.; Wu, W.; Lin, Y.; Wang, M. Automatic glioma segmentation based on adaptive superpixel. BMC Med. Imaging 2019, 19, 73. [Google Scholar] [CrossRef] [Green Version]
- Bechar, M.; Settouti, N.; Barra, V.; Chikh, M. Semi-supervised superpixel classification for medical images segmentation: Application to detection of glaucoma disease. Multidimens. Syst. Signal Process. 2018, 29, 979–998. [Google Scholar]
- Huang, Q.; Huang, Y.; Luo, Y.; Yuan, F.; Li, X. Segmentation of breast ultrasound image with semantic classification of superpixels. Med. Image Anal. 2020, 61, 101657. [Google Scholar] [CrossRef] [PubMed]
- Neubert, P.; Protzel, P. Superpixel benchmark and comparison. Proc. Forum Bildverarb. 2012, 6, 1–12. [Google Scholar]
- Chen, J.; Li, Z.; Huang, B. Linear spectral clustering superpixel. IEEE Trans. Image Process. 2017, 26, 3317–3330. [Google Scholar] [CrossRef] [PubMed]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
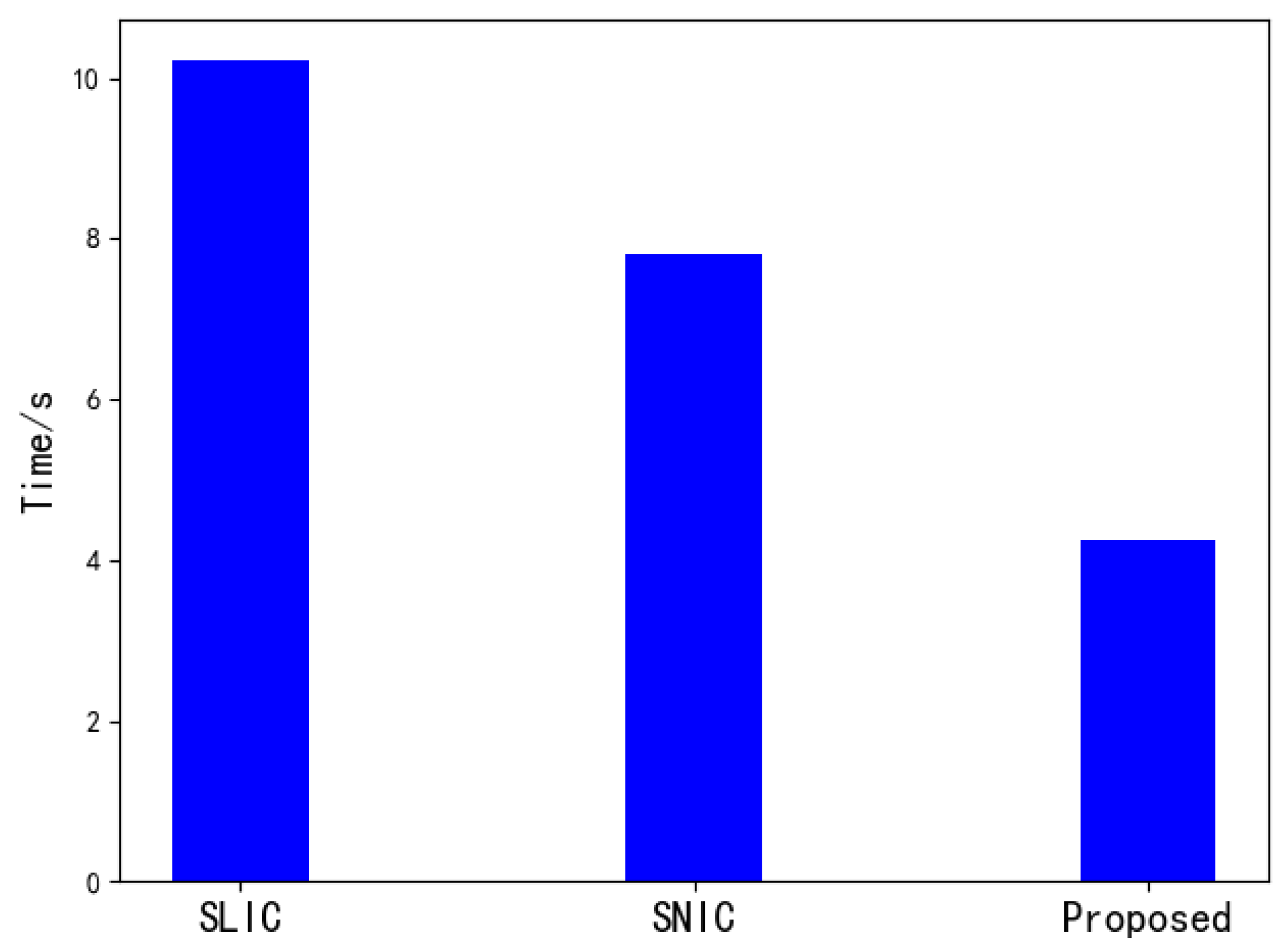
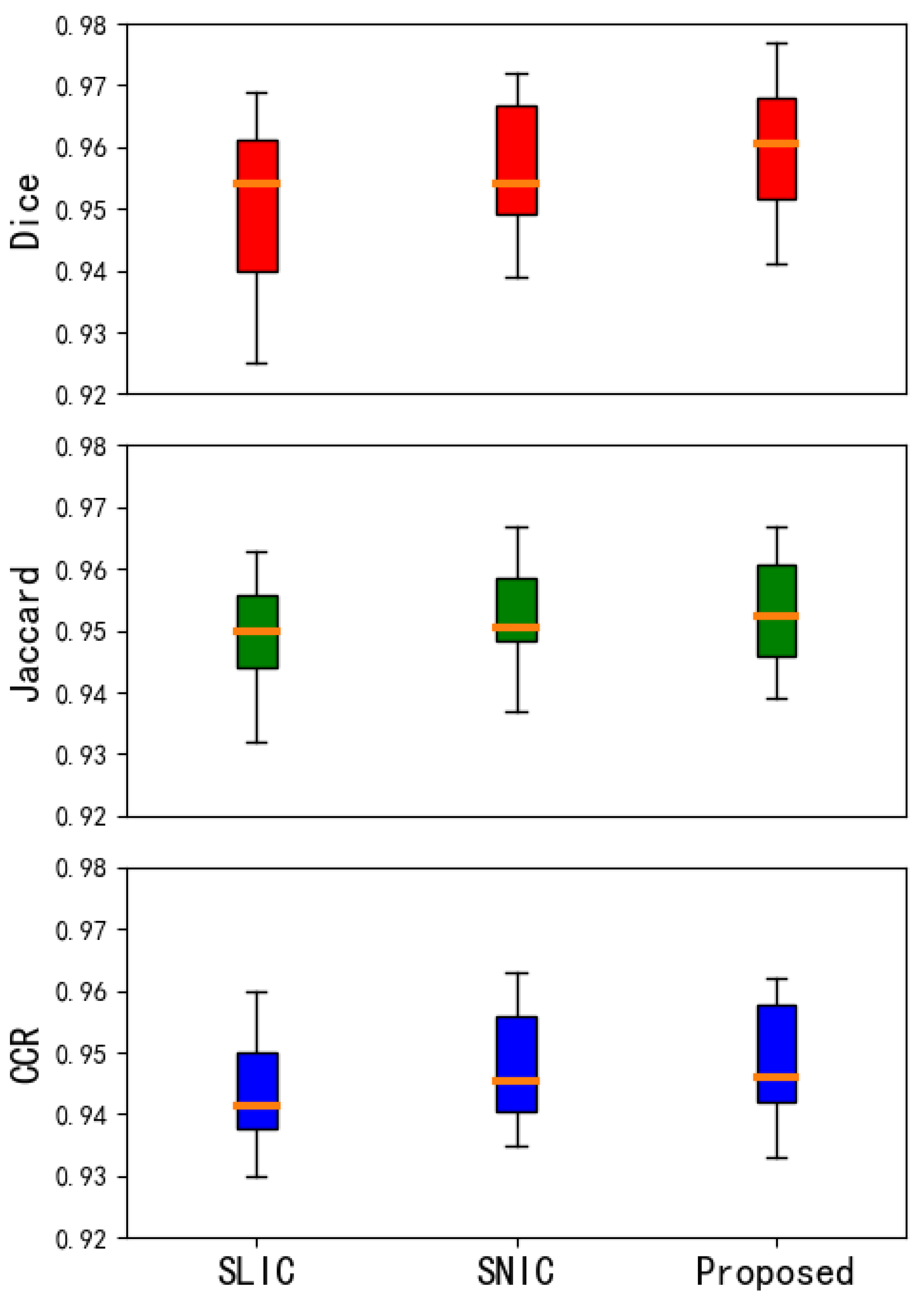
| Method | Dice | Jaccard | CCR | Time |
|---|---|---|---|---|
| SLIC | 0.951 | 0.933 | 0.935 | 12.9 s |
| SNIC | 0.971 | 0.952 | 0.958 | 10.2 s |
| The algorithm in this paper | 0.974 | 0.955 | 0.961 | 3.8 s |
| Method | Dice | Jaccard | CCR | Time |
|---|---|---|---|---|
| SLIC | 0.944 | 0.949 | 0.951 | 14.3 s |
| SNIC | 0.965 | 0.958 | 0.962 | 12.5 s |
| The algorithm in this paper | 0.967 | 0.965 | 0.970 | 4.2 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, B.; Wu, S.; Zhang, S.; Liu, X.; Li, G. Fast Segmentation of Vertebrae CT Image Based on the SNIC Algorithm. Tomography 2022, 8, 59-76. https://doi.org/10.3390/tomography8010006
Li B, Wu S, Zhang S, Liu X, Li G. Fast Segmentation of Vertebrae CT Image Based on the SNIC Algorithm. Tomography. 2022; 8(1):59-76. https://doi.org/10.3390/tomography8010006
Chicago/Turabian StyleLi, Bing, Shaoyong Wu, Siqin Zhang, Xia Liu, and Guangqing Li. 2022. "Fast Segmentation of Vertebrae CT Image Based on the SNIC Algorithm" Tomography 8, no. 1: 59-76. https://doi.org/10.3390/tomography8010006
APA StyleLi, B., Wu, S., Zhang, S., Liu, X., & Li, G. (2022). Fast Segmentation of Vertebrae CT Image Based on the SNIC Algorithm. Tomography, 8(1), 59-76. https://doi.org/10.3390/tomography8010006