

A Multi-Strategy Improvement Secretary Bird Optimization Algorithm for Engineering Optimization Problems


Abstract
1. Introduction
- (1)
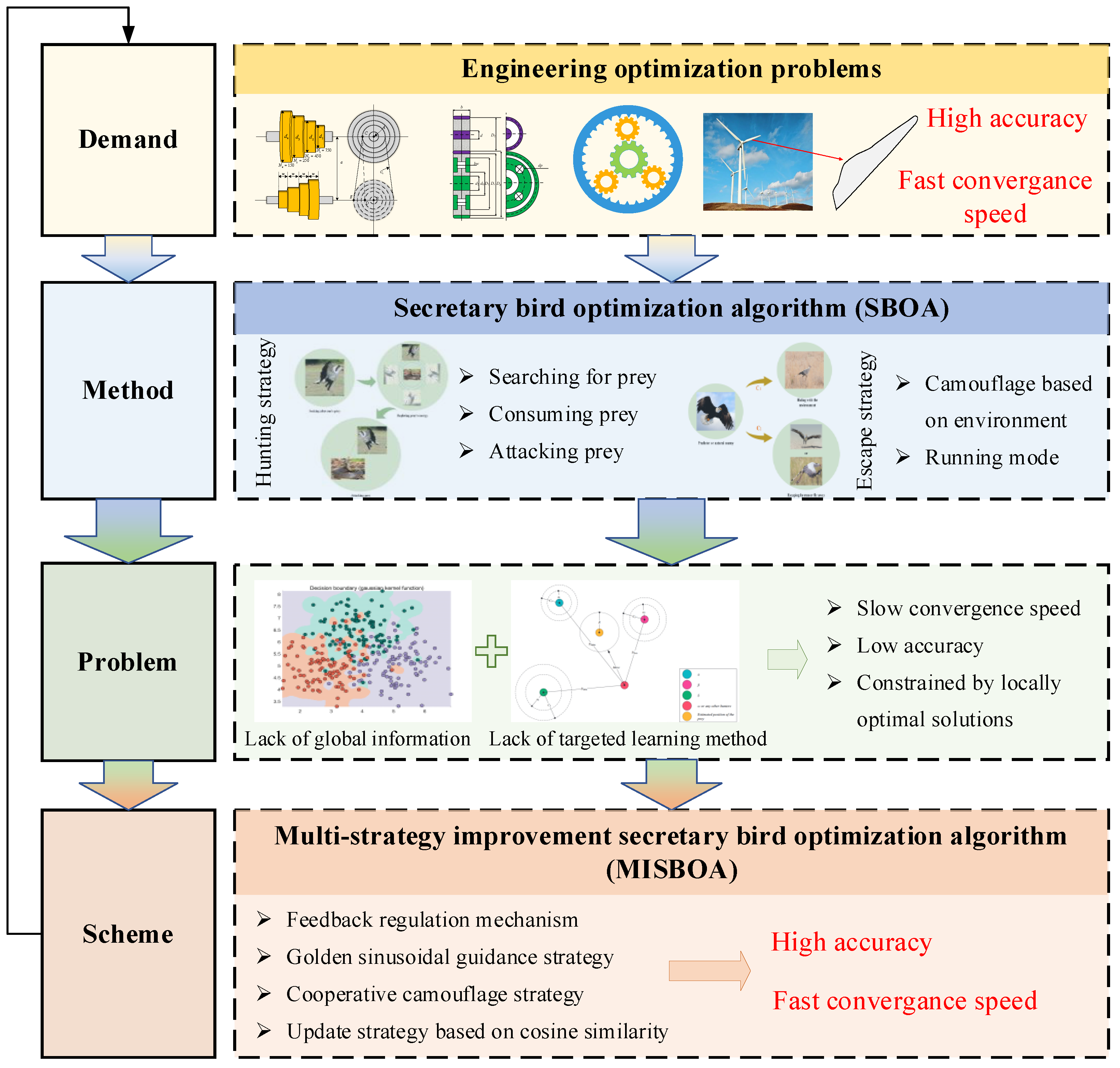
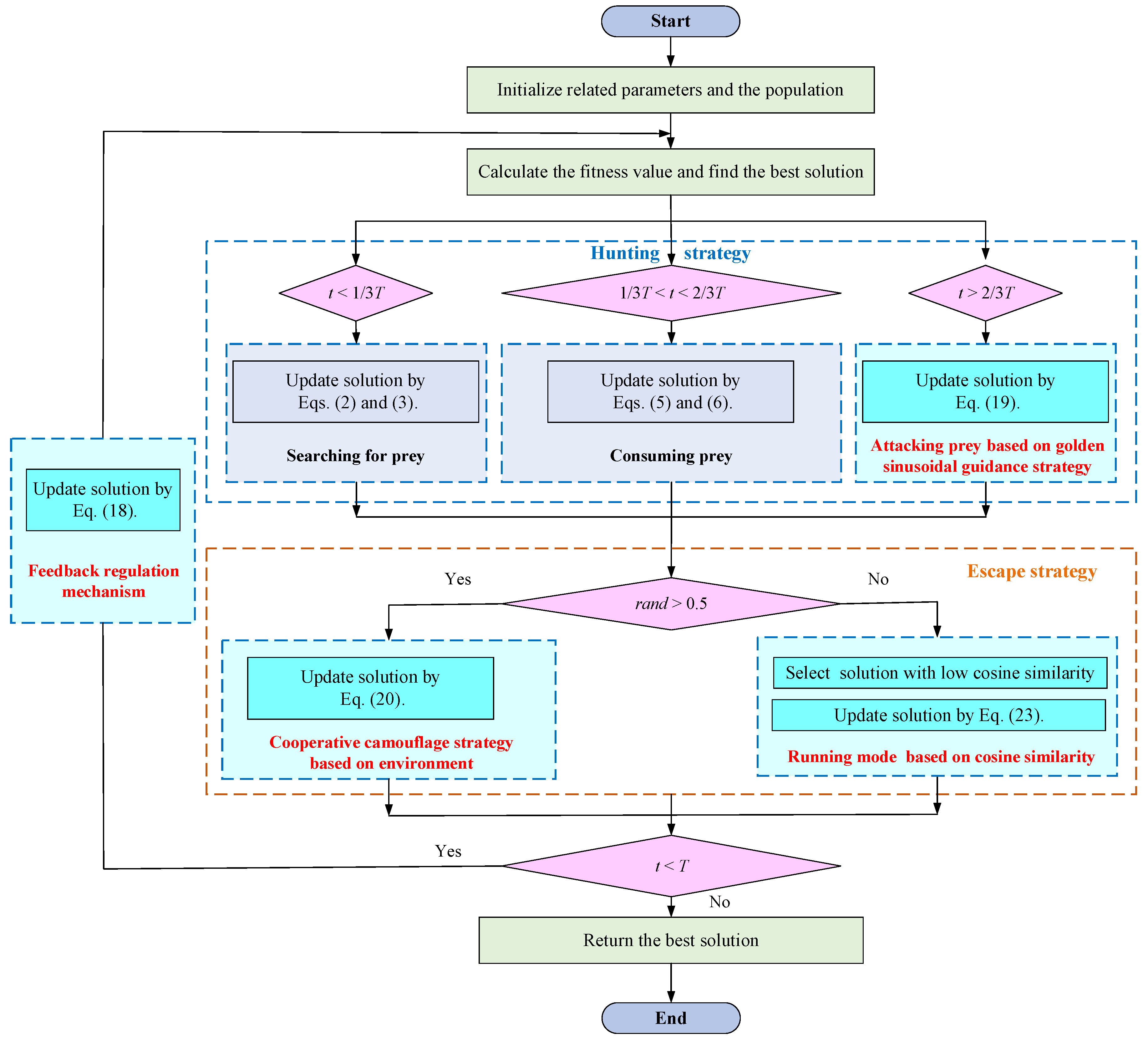
- An enhanced algorithm MISBOA is proposed by integrating four specific improvement strategies.A feedback regulation mechanism is introduced to fully make use of the global information, leading to faster global convergence.To improve the development ability of SBOA, a golden sinusoidal guidance strategy is adopted in the hunting stage.In the escape stage, a cooperative camouflage strategy is employed to enhance the global exploration ability.An update strategy based on cosine similarity is used to keep the population diverse, which influences the ability to escape local optimums.
- (2)
- The ability of MISBOA is verified by solving basic test functions and well-known engineering optimization problems.The MISBOA and other eight typical algorithms are tested on functions with 10 and 20 dimensions of CEC2022. Accuracy, convergence speed, stability, and extensibility of various algorithms are analyzed.The engineering application capability of the MISBOA is verified on five complex engineering optimization problems.
- (3)
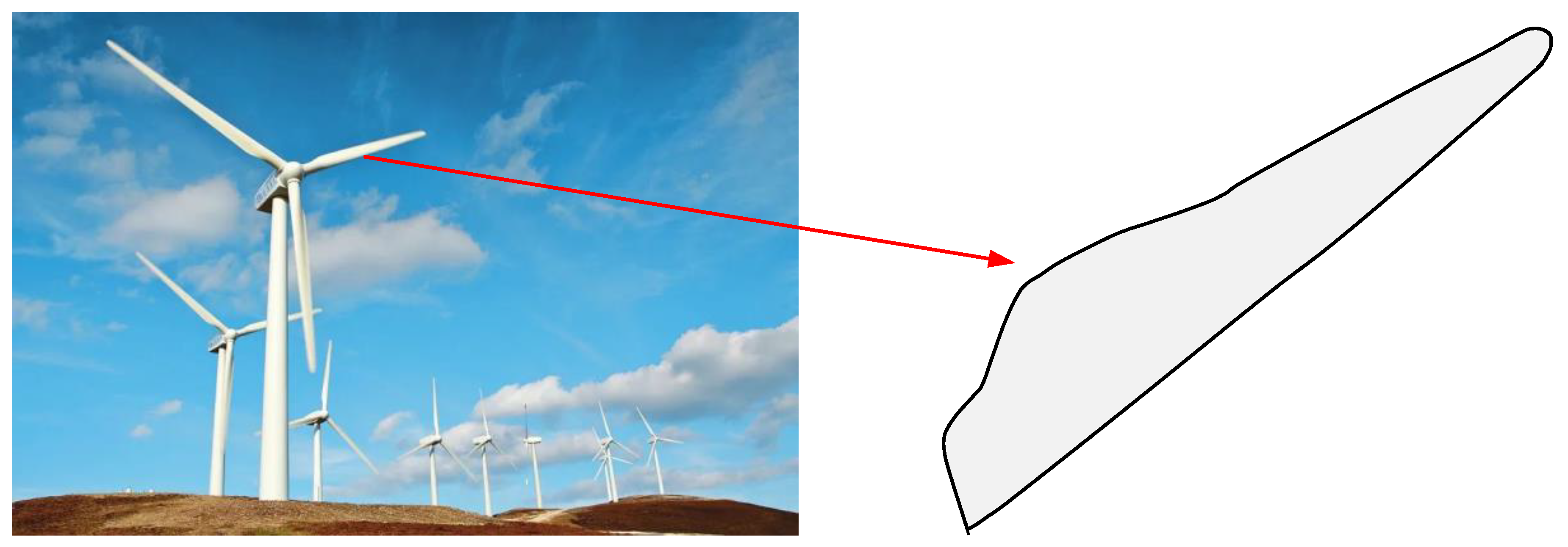
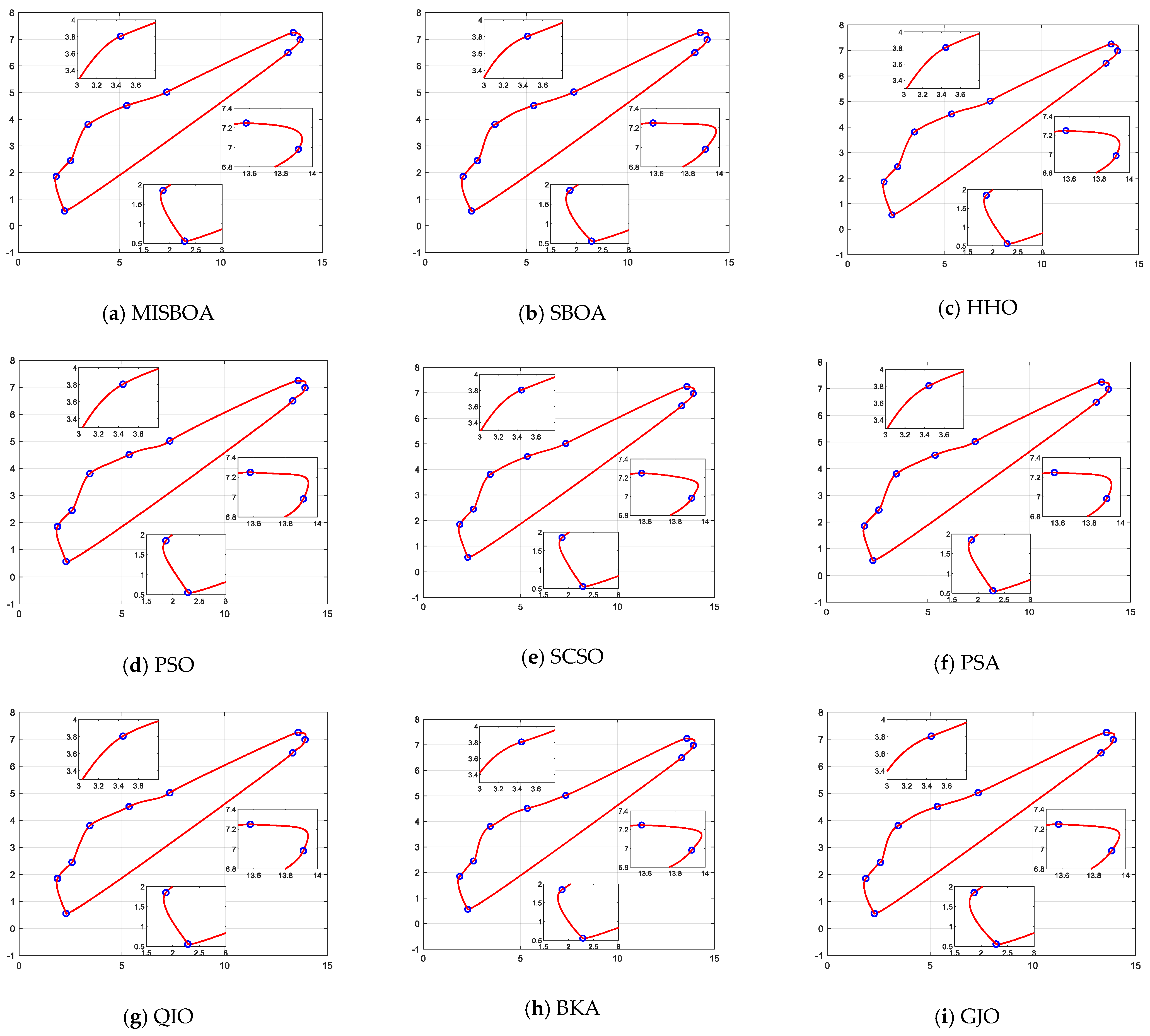
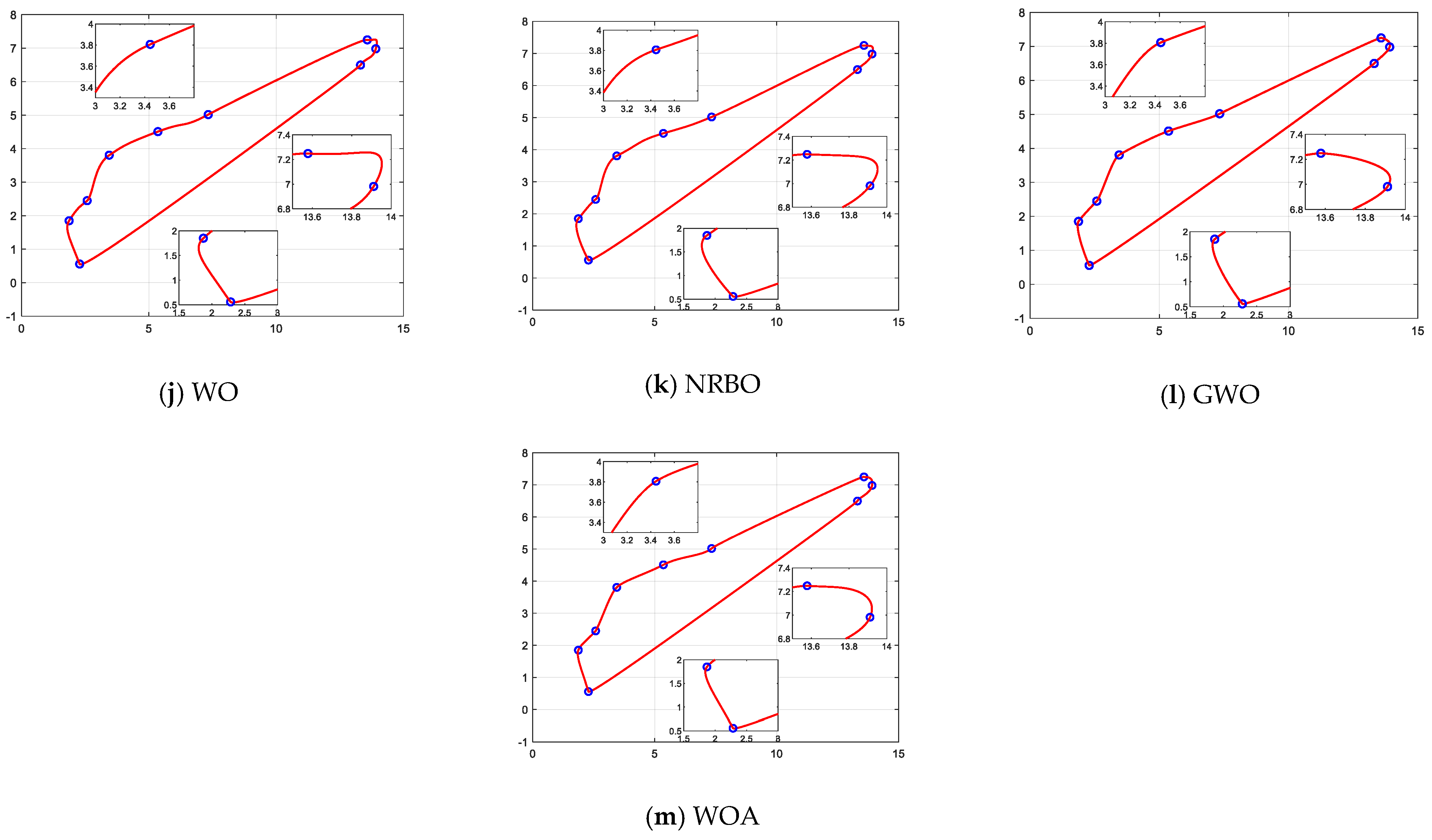
- The MISBOA is applied for a shape optimization problem of combined curves.With the aim of minimizing the total energy, a shape optimization model of combined quartic generalized Ball interpolation (CQGBI) curve is established.The shape of wind-driven generator blades is optimized by MISBOA and other algorithms to increase the efficiency of power generation.
2. The Multi-Strategy Improvement Secretary Bird Optimization Algorithm
2.1. The Basic Secretary Bird Optimization Algorithm
2.1.1. Initial Preparation Phase
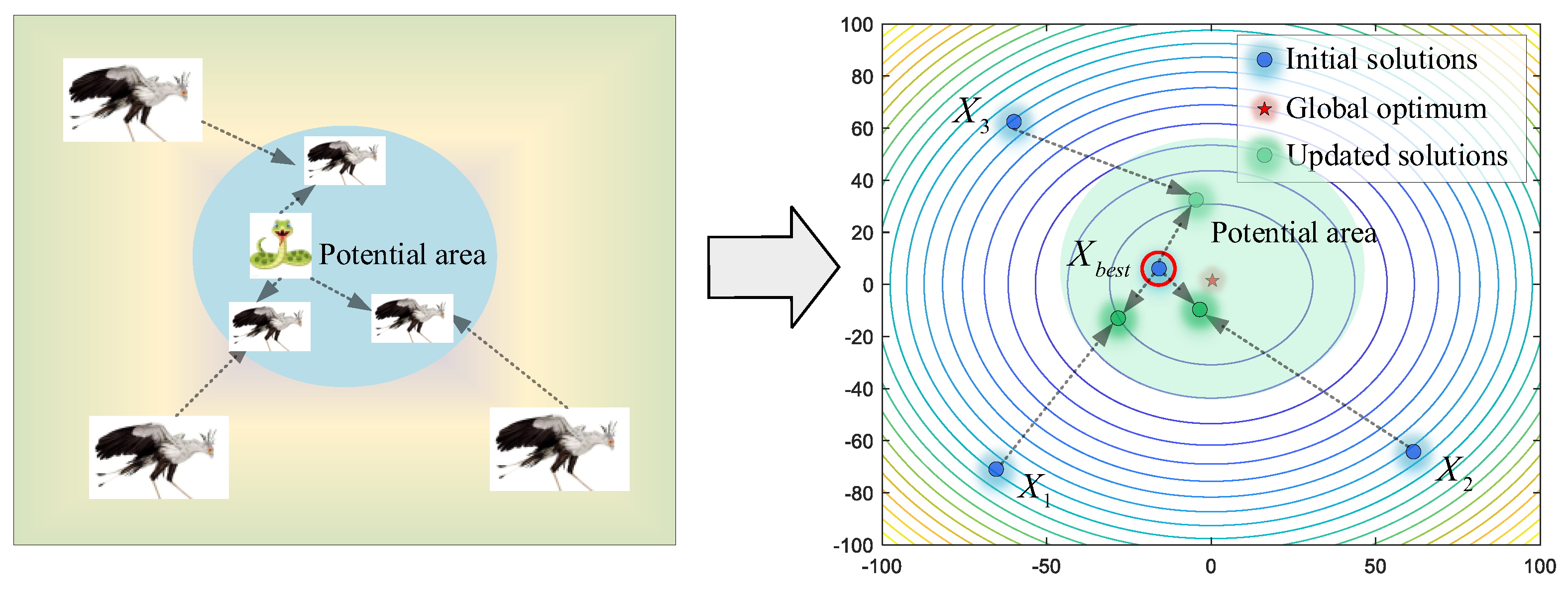
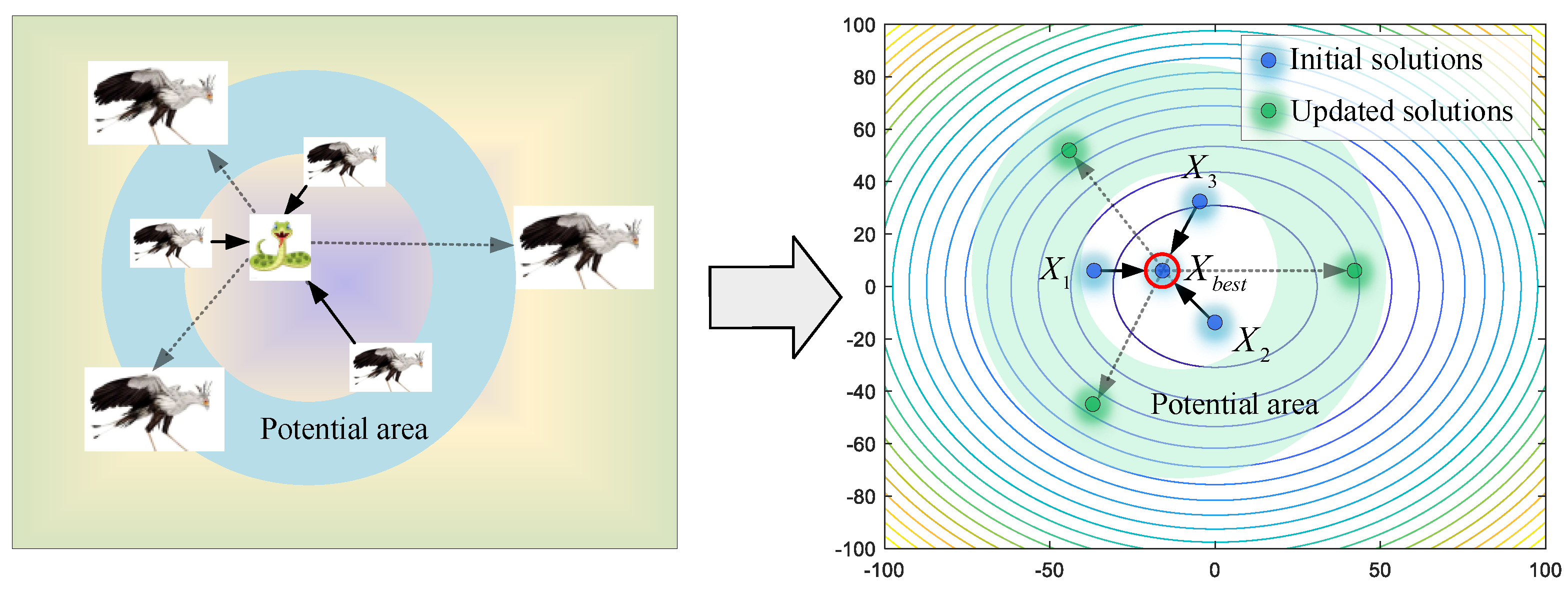
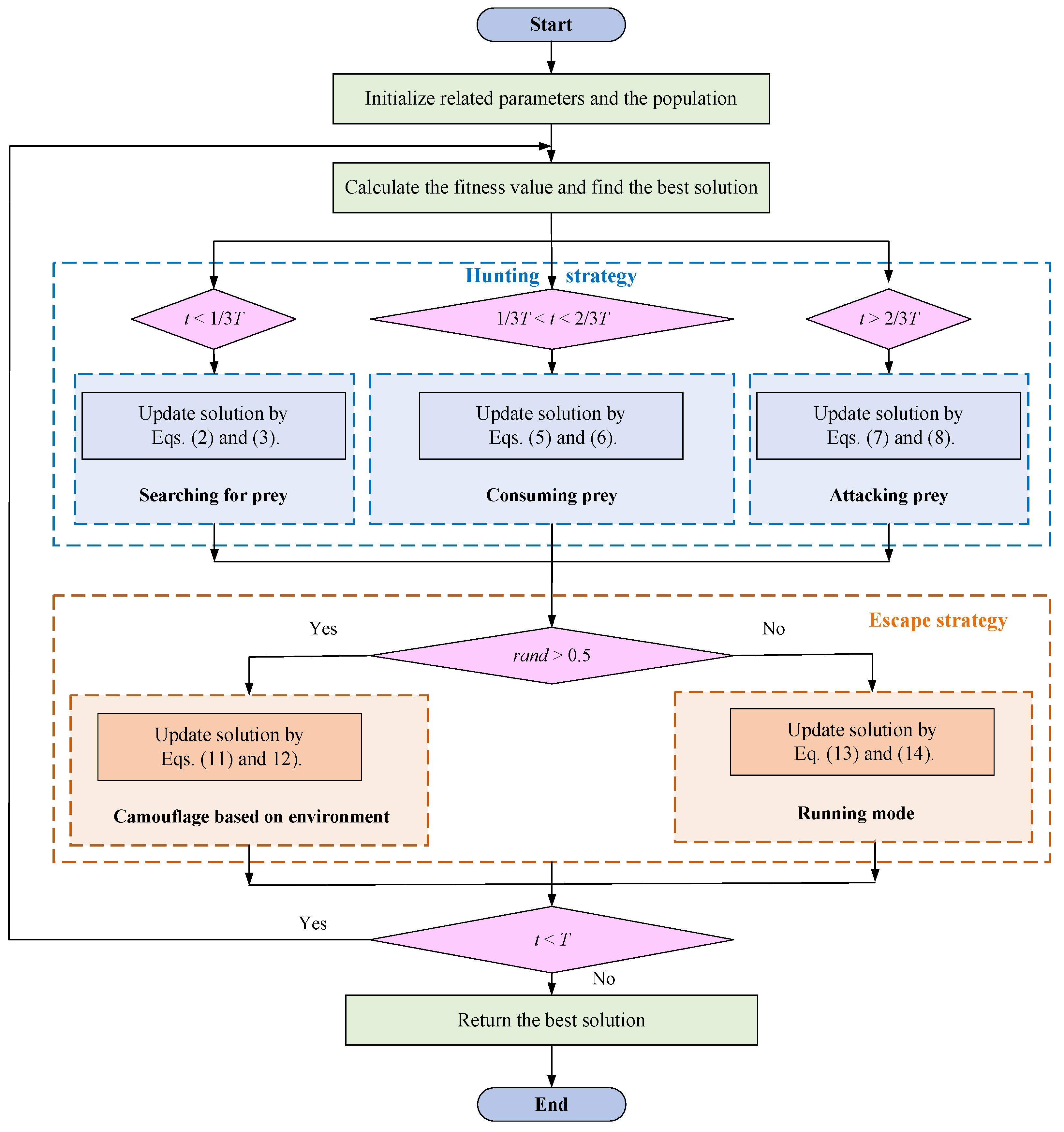
2.1.2. Hunting Strategy of Secretary Birds
- (1)
- Searching for prey
- (2)
- Consuming prey
- (3)
- Attacking prey
2.1.3. Escape Strategy for Secretary Birds
- (1)
- Camouflage based on environment
- (2)
- Running mode
2.2. The Multi-Strategy Improvement Secretary Bird Optimization Algorithm
- (1)
- For the whole algorithm, the global information is not fully used to adjust the position update strategy. This defect may affect the overall performance of the SBOA, which means the balance between development ability and exploration ability.
- (2)
- In the hunting stage, the attack mode of secretary birds can be further enhanced by observing the performance of the prey, which is to improve the development ability of SBOA.
- (3)
- In the escape stage, secretary birds decide how to camouflage or escape using a few simple random strategies, which may influence the ability to escape local optimums.
2.2.1. Feedback Regulation Mechanism
2.2.2. Golden Sinusoidal Guidance Strategy
2.2.3. Cooperative Camouflage Strategy
2.2.4. Update Strategy Based on Cosine Similarity
2.2.5. Computational Complexity Analysis
3. Numerical Experiment on the Test Functions
3.1. Test Functions and Parameter Setting
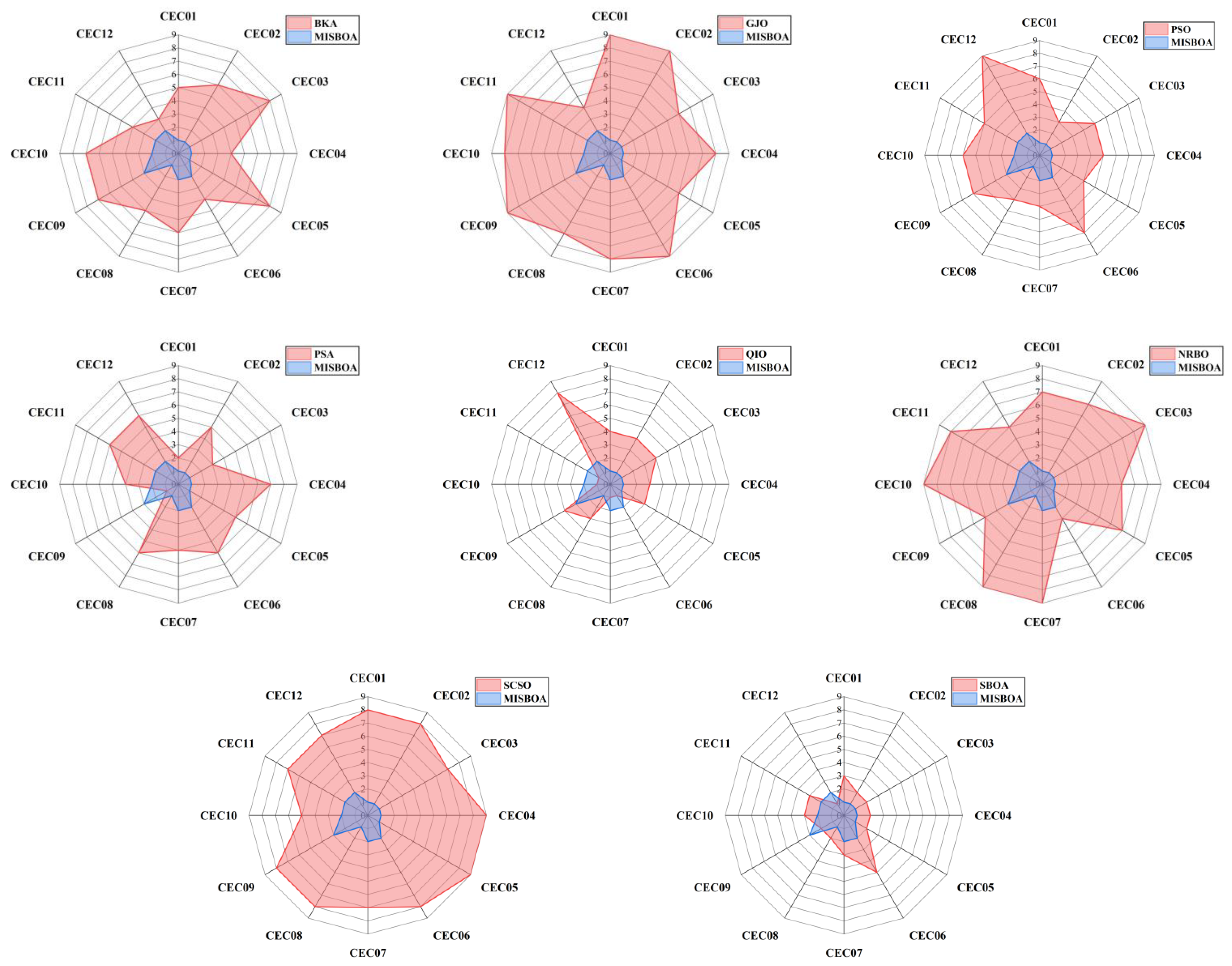
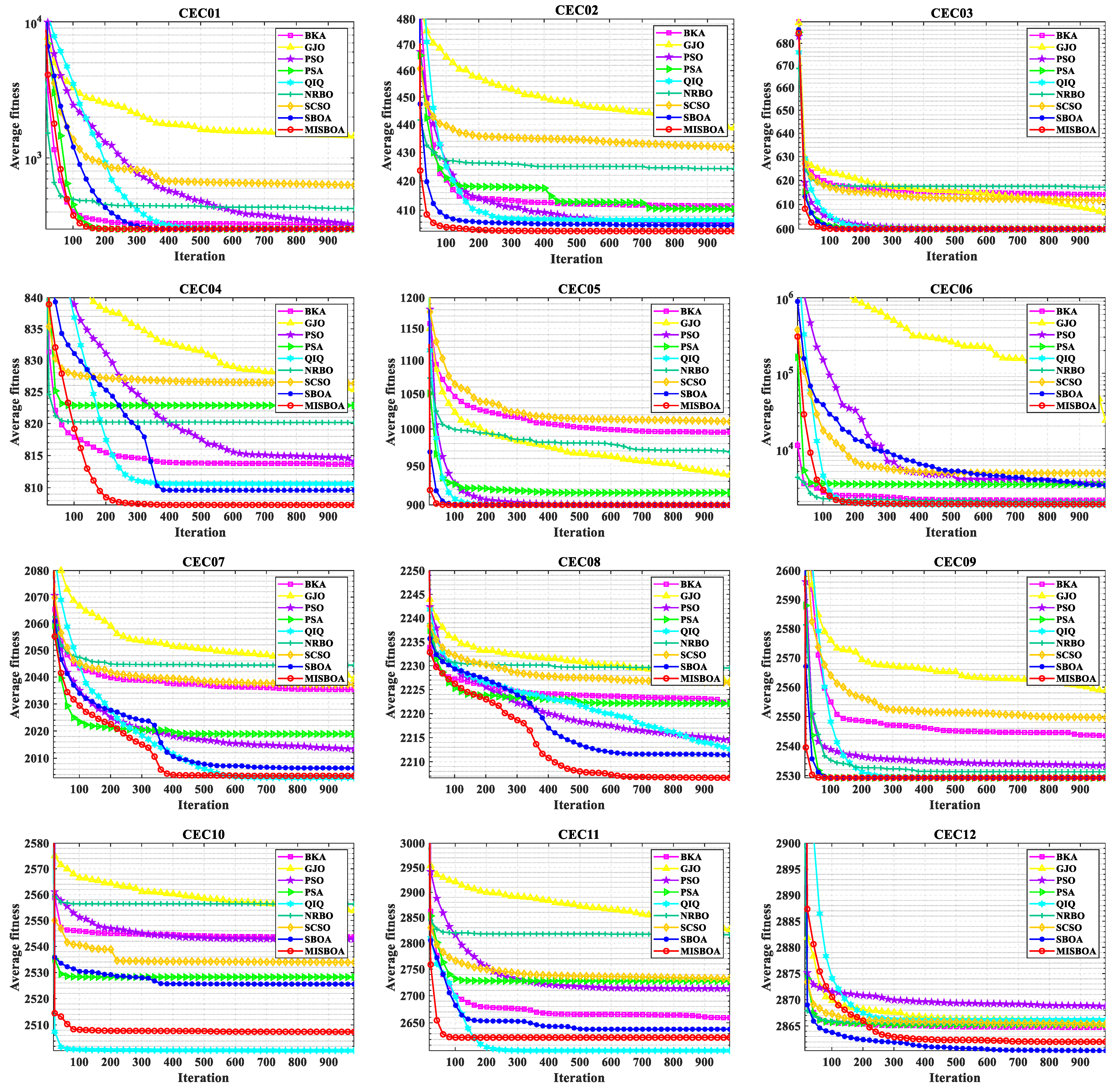
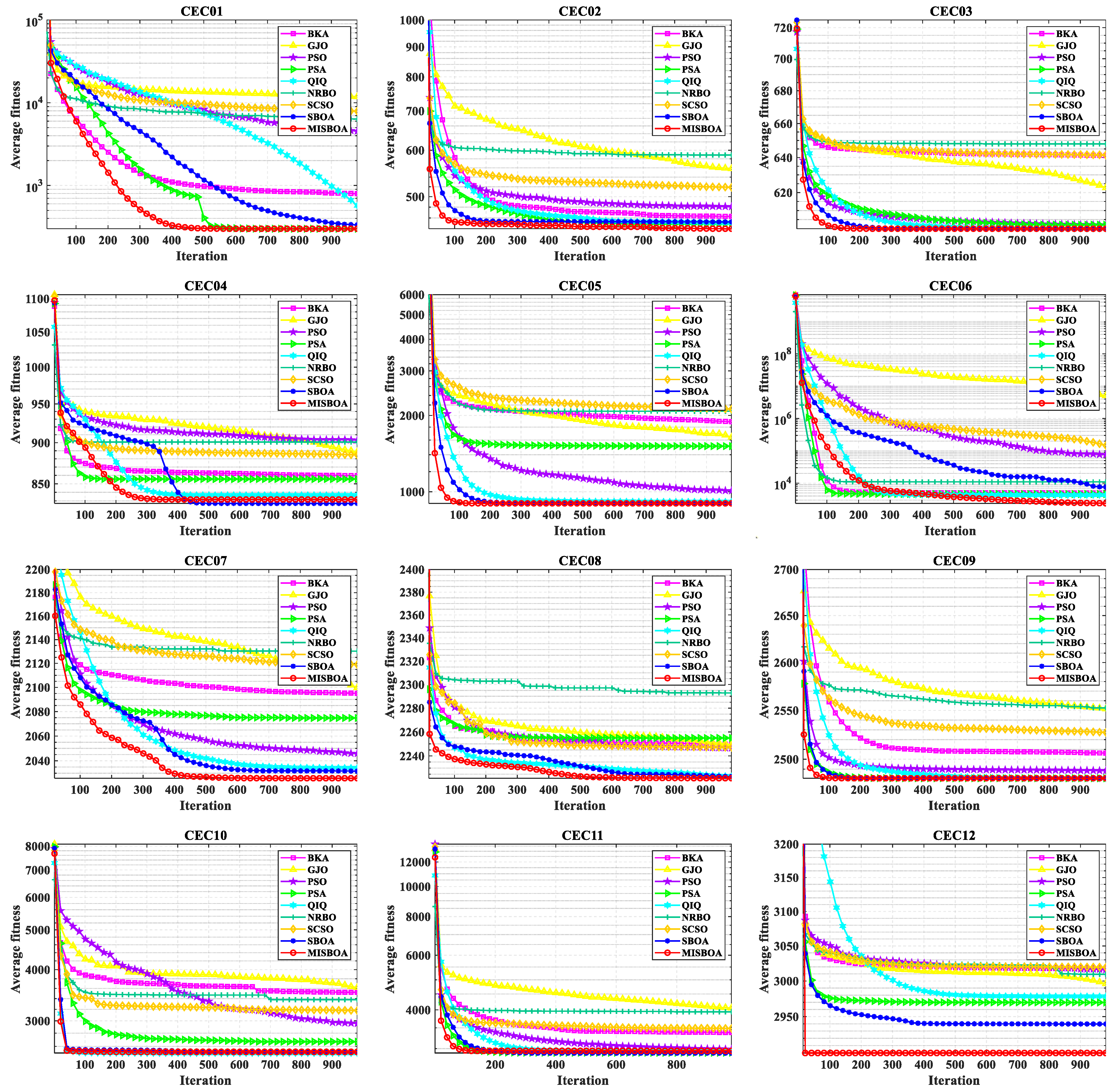
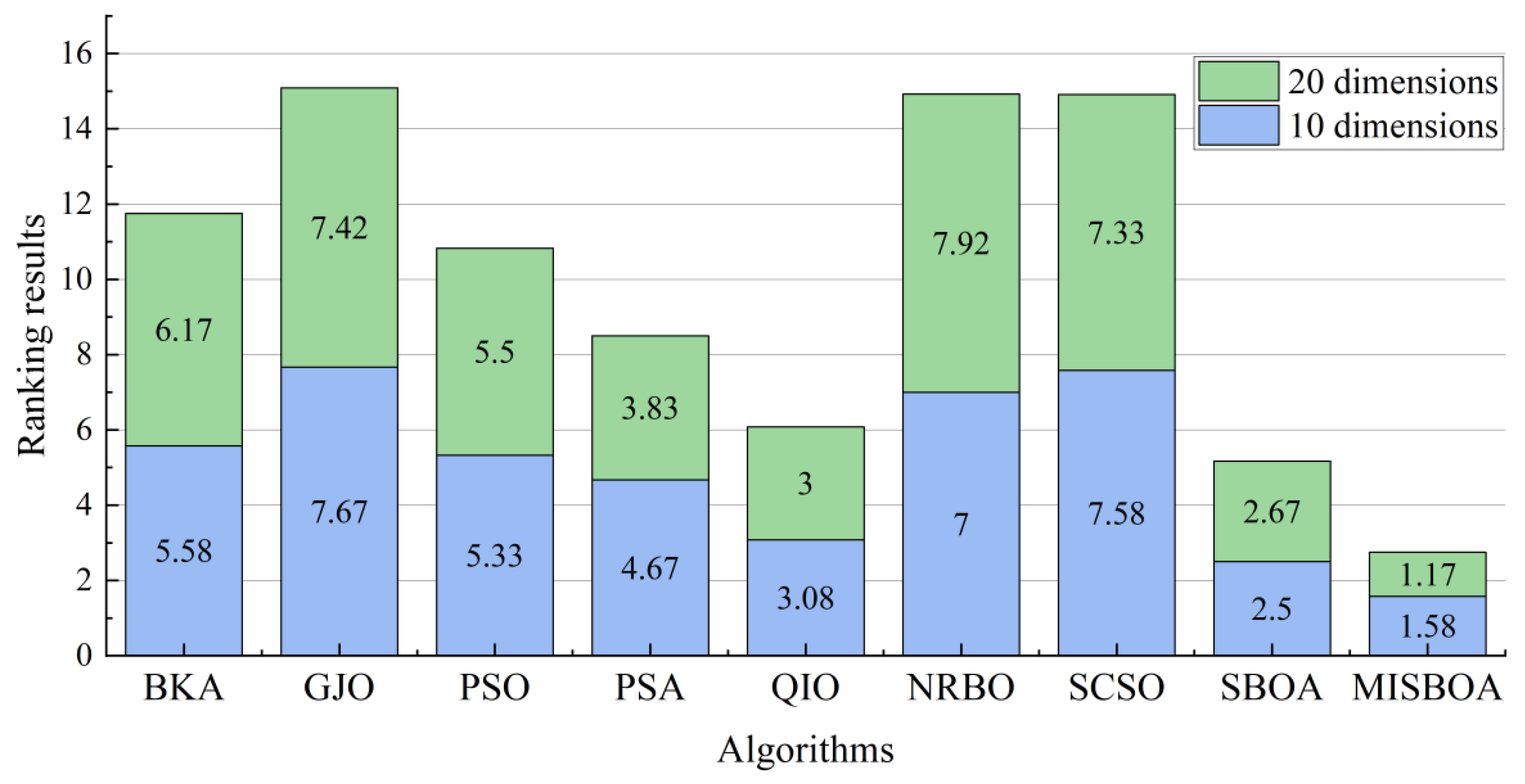
3.2. Analysis and Discussion of the Results on CEC 2022 with 10 Dimensions
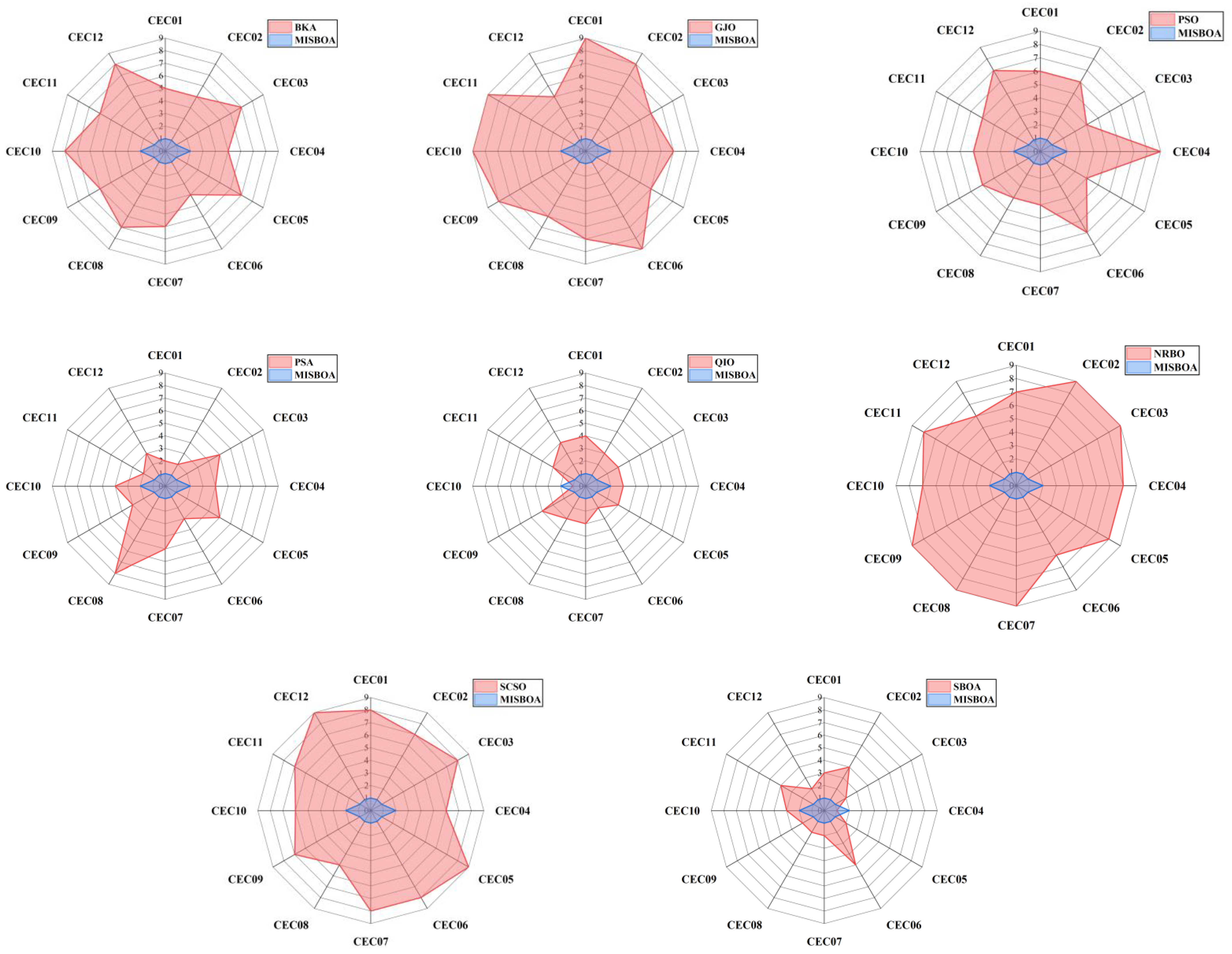
3.3. Analysis and Discussion of the Results on CEC 2022 with 20 Dimensions
4. The Application for Real-World Optimization Problems
4.1. Engineering Optimization Problems
4.1.1. Step-Cone Pulley Design Problem
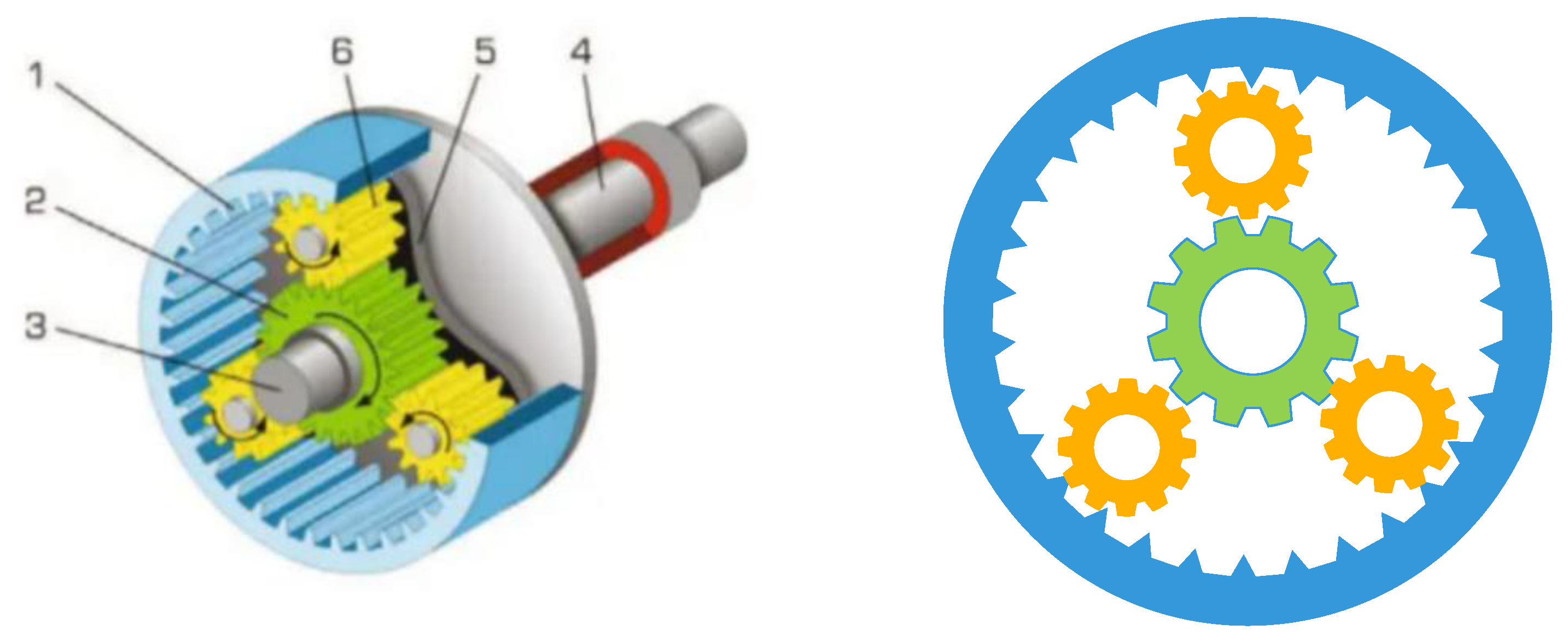
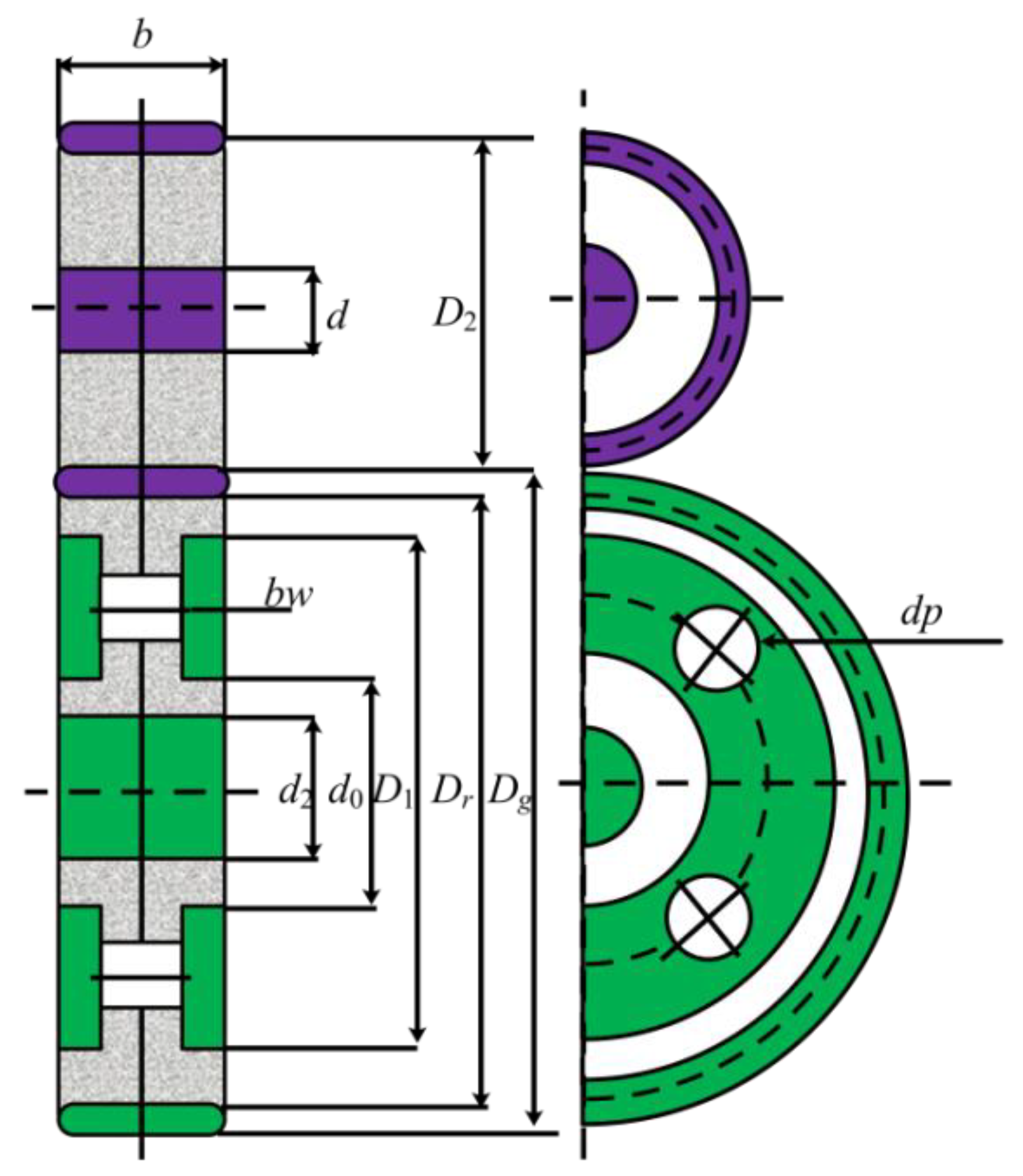
4.1.2. Planetary Gear Train Design Problem
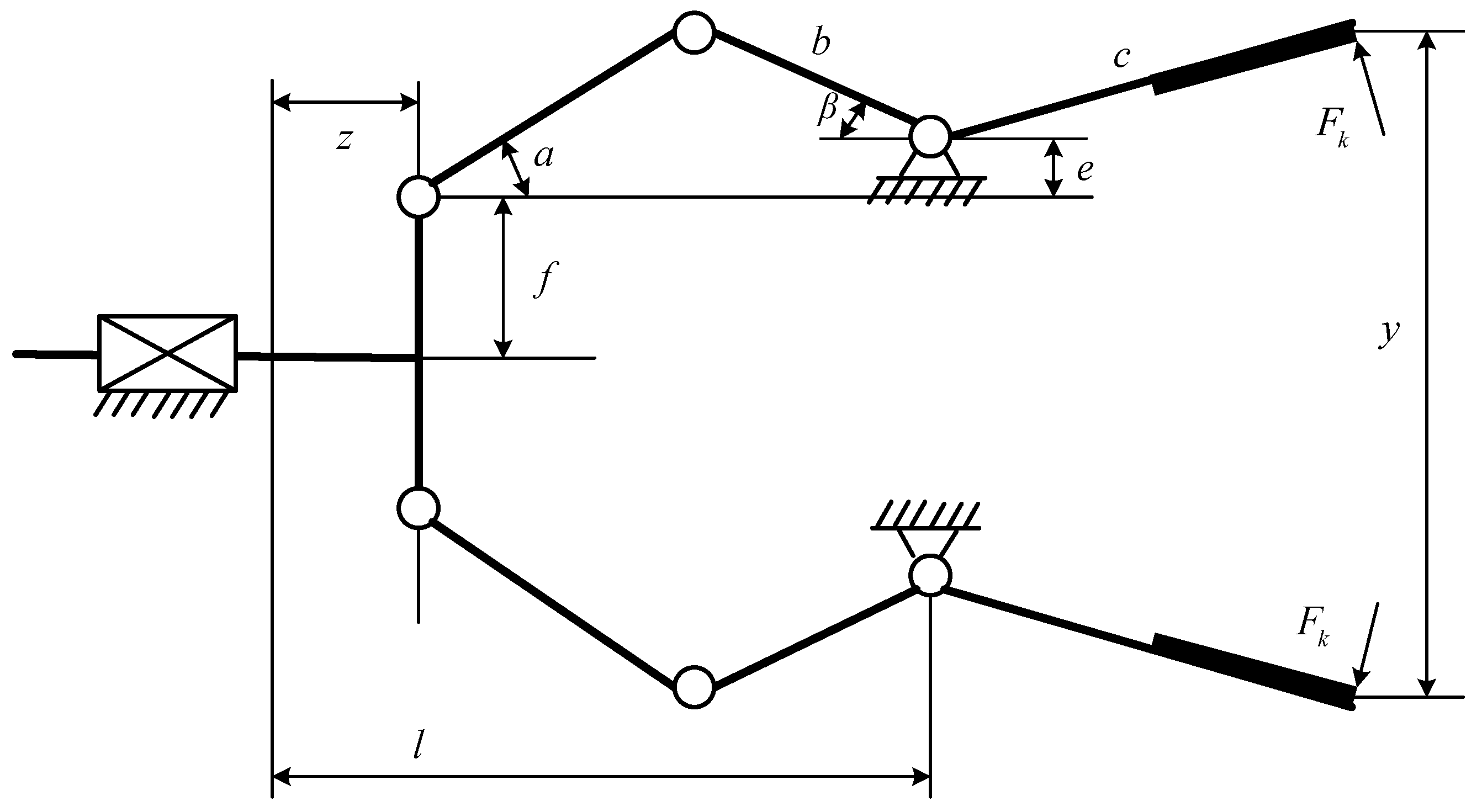
4.1.3. Robot Gripper Design Problem
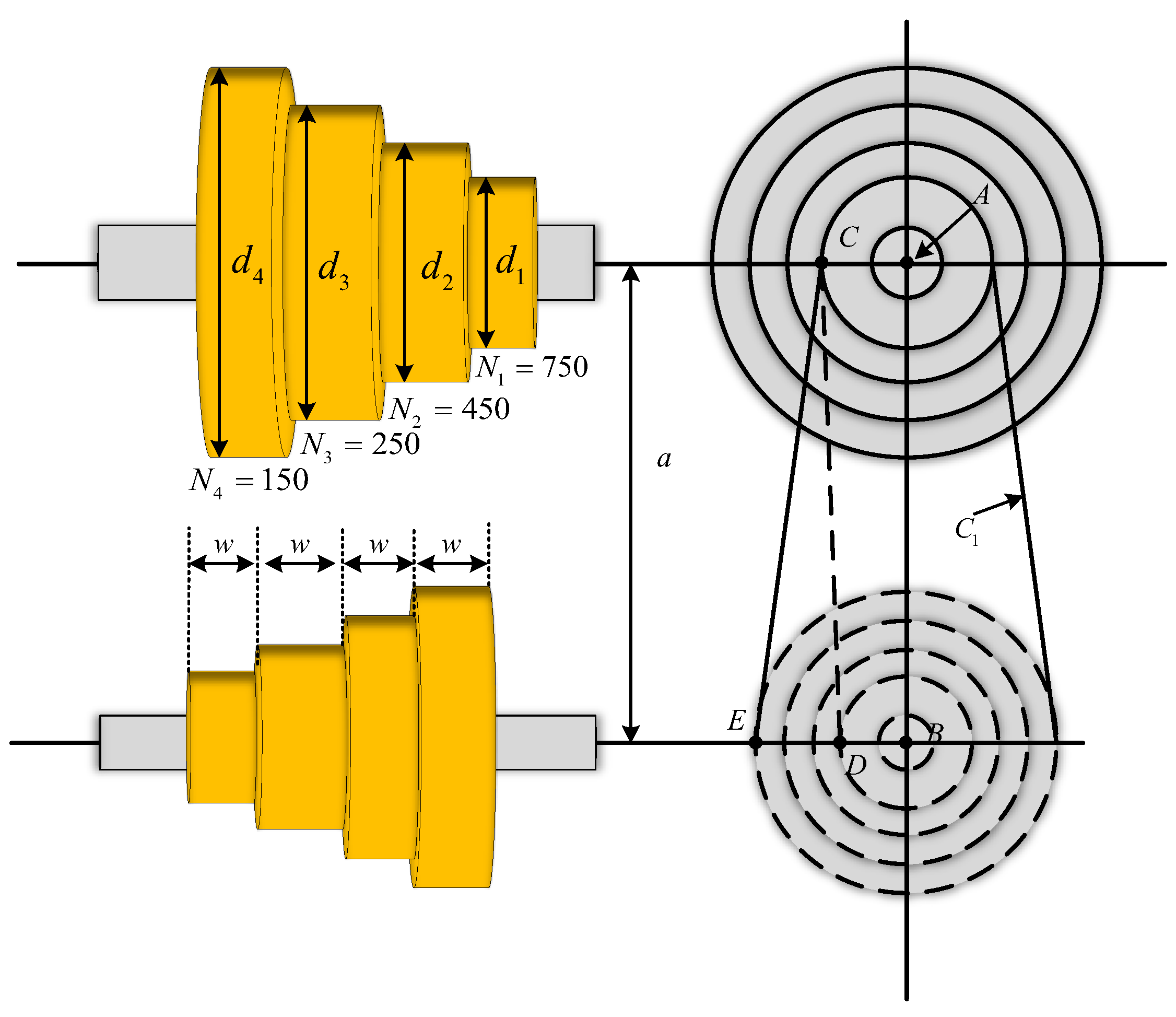
4.1.4. Four-Stage Gearbox Design Problem
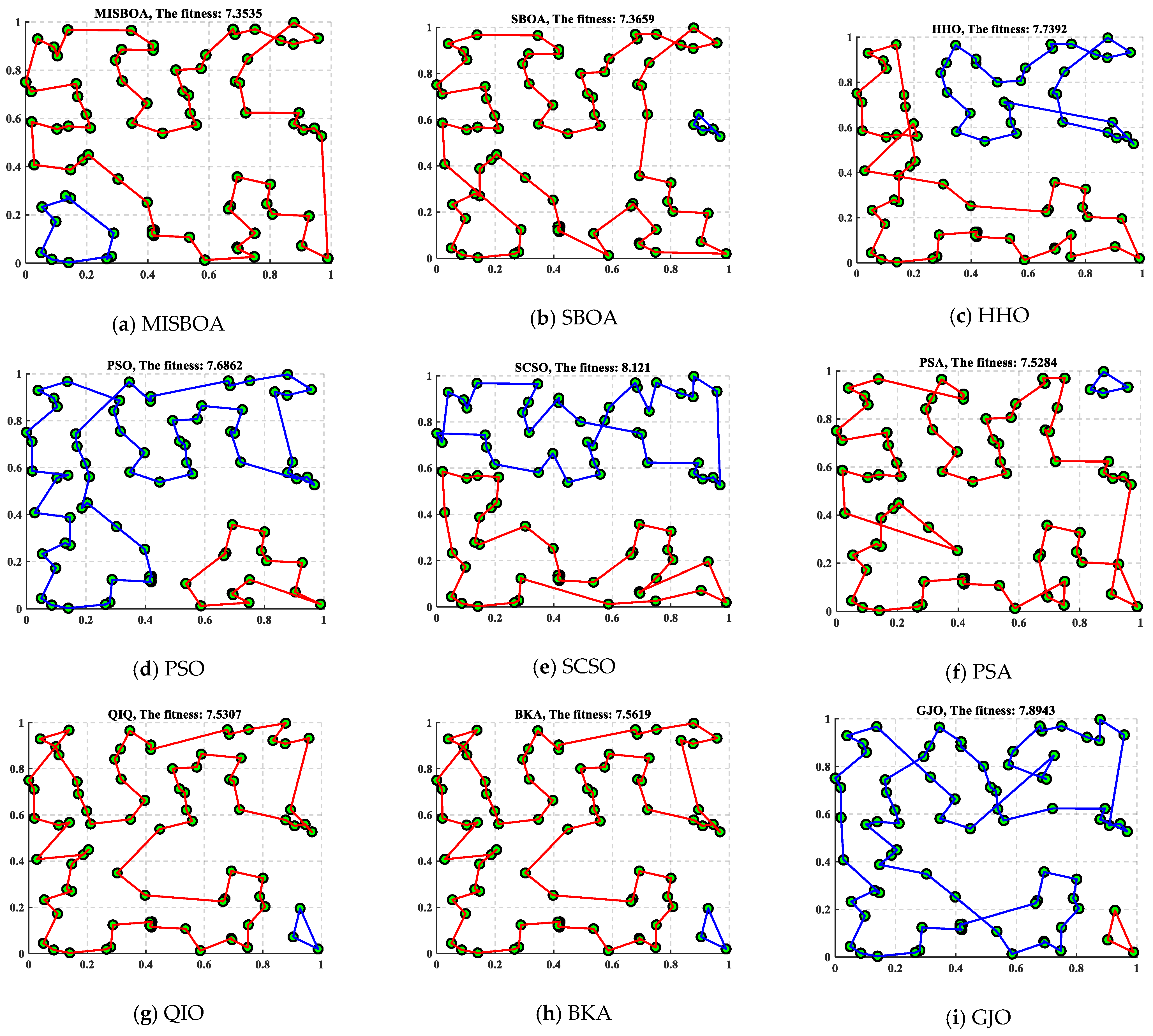
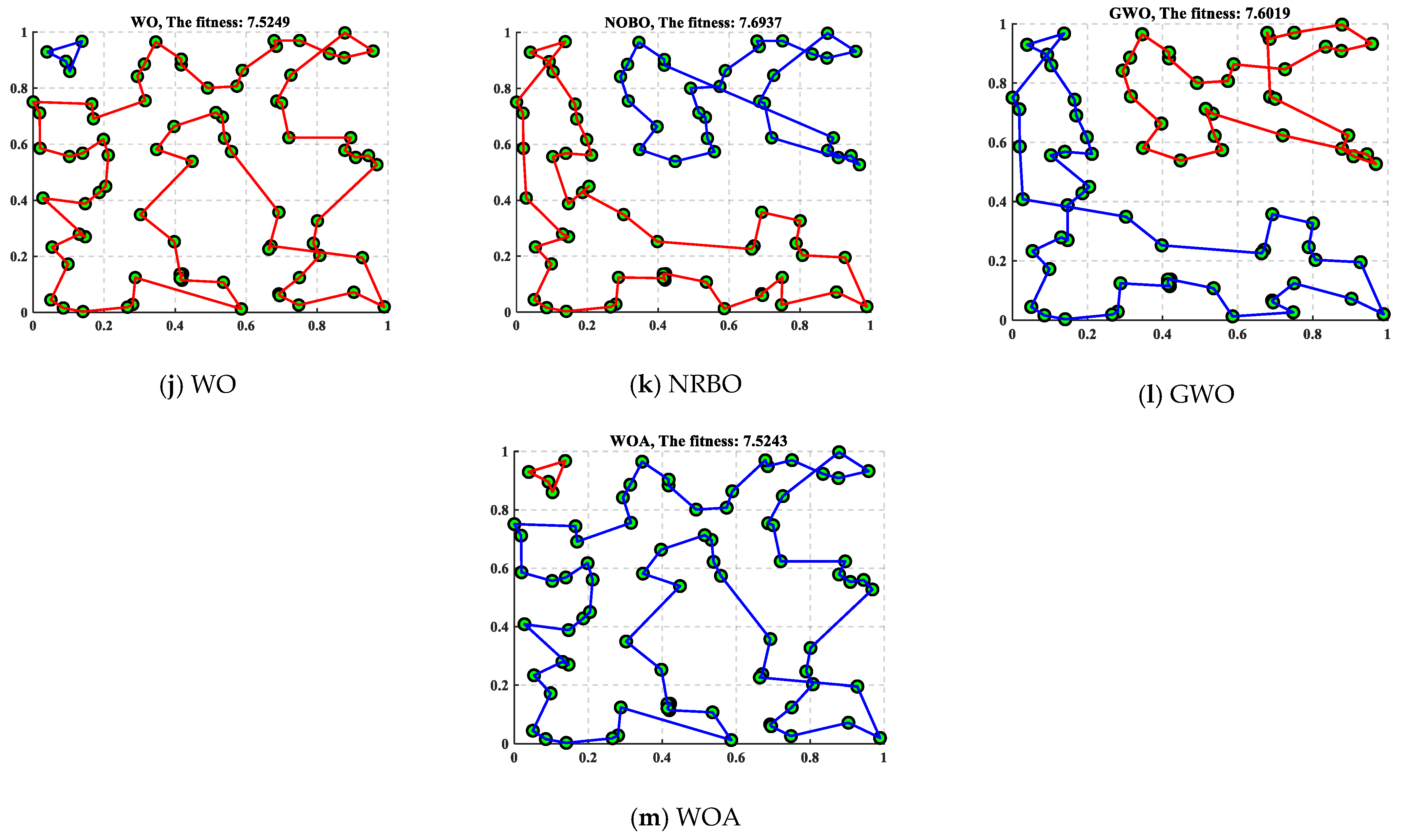
4.1.5. Traveling Salesman Problem
4.2. Shape Optimization Problems of Combined Curves
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Li, W.; Wang, G.-G.; Gandomi, A.H. A survey of learning-based intelligent optimization algorithms. Arch. Comput. Methods Eng. 2021, 28, 3781–3799. [Google Scholar] [CrossRef]
- Tsai, S.C.; Yeh, Y.; Wang, H.; Chou, T.C. Efficient optimization in stochastic production planning problems with product substitution. Comput. Oper. Res. 2024, 164, 106544. [Google Scholar] [CrossRef]
- Li, Q.; Guo, L. Nature-inspired metaheuristic optimization algorithms for urban transit routing problem. Eng. Res. Express 2023, 5, 015040. [Google Scholar] [CrossRef]
- Hu, G.; Gong, C.; Li, X.; Xu, Z. CGKOA: An enhanced Kepler optimization algorithm for multi-domain optimization problems. Comput. Methods Appl. Mech. Eng. 2024, 425, 116964. [Google Scholar] [CrossRef]
- Truong, D.-N.; Chou, J.-S. Fuzzy adaptive forensic-based investigation algorithm for optimizing frequency-constrained structural dome design. Math. Comput. Simul. 2023, 210, 473–531. [Google Scholar] [CrossRef]
- Hu, G.; Huang, F.; Seyyedabbasi, A.; Wei, G. Enhanced multi-strategy bottlenose dolphin optimizer for UAVs path planning. Appl. Math. Model. 2024, 130, 243–271. [Google Scholar] [CrossRef]
- Younis, H.B.; Moosavi, S.K.; Zafar, M.H.; Hadi, S.F.; Mansoor, M. Feature selection based on dataset variance optimization using Whale Optimization Algorithm (WOA). In Handbook of Whale Optimization Algorithm; Academic Press: Cambridge, MA, USA, 2024; pp. 547–565. [Google Scholar]
- Hu, G.; Guo, Y.; Wei, G.; Abualigah, L. Genghis Khan shark optimizer: A novel nature-inspired algorithm for engineering optimization. Adv. Eng. Inform. 2023, 58, 102210. [Google Scholar] [CrossRef]
- Hu, G.; Zhong, J.; Wei, G. SaCHBA_PDN: Modified honey badger algorithm with multi-strategy for UAV path planning. Expert Syst. Appl. 2023, 223, 119941. [Google Scholar] [CrossRef]
- Hu, G.; Zheng, Y.; Houssein, E.H.; Wei, G. DRPSO:A multi-strategy fusion particle swarm optimization algorithm with a replacement mechanisms for colon cancer pathology image segmentation. Comput. Biol. Med. 2024, 108780. [Google Scholar] [CrossRef]
- Raza Moosavi, S.K.; Zafar, M.H.; Mirjalili, S.; Sanfilippo, F. Improved barnacles movement optimizer (ibmo) algorithm for engineering design problems. In International Conference on Artificial Intelligence and Soft Computing; Springer Nature: Cham, Switzerland, 2023; pp. 427–438. [Google Scholar] [CrossRef]
- Song, B.Y.; Wang, Z.D.; Zou, L. An improved PSO algorithm for smooth path planning of mobile robots using continuous high-degree Bezier curve. Appl. Soft Comput. 2021, 100, 106960. [Google Scholar] [CrossRef]
- Morin, M.; Abi-Zeid, I.; Quimper, C.G. Ant colony optimization for path planning in search and rescue operations. Eur. J. Oper. Res. 2023, 305, 53–63. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Ghasemi, M.; Rahimnejad, A.; Hemmati, R.; Akbari, E.; Gadsden, S.A. Wild Geese Algorithm: A novel algorithm for large scale optimization based on the natural life and death of wild geese. Array 2021, 11, 100074. [Google Scholar] [CrossRef]
- Slowik, A.; Kwasnicka, H. Evolutionary algorithms and their applications to engineering problems. Neural Comput. Appl. 2020, 32, 12363–12379. [Google Scholar] [CrossRef]
- Bhattacharjee, A.K.; Mukhopadhyay, A. An improved genetic algorithm with local refinement for solving hierarchical single-allocation hub median facility location problem. Soft Comput. 2023, 27, 1493–1509. [Google Scholar] [CrossRef]
- Li, J.; Soradi-Zeid, S.; Yousefpour, A.; Pan, D. Improved differential evolution algorithm based convolutional neural network for emotional analysis of music data. Appl. Soft Comput. 2024, 153, 111262. [Google Scholar] [CrossRef]
- Lian, J.; Hui, G. Human Evolutionary Optimization Algorithm. Expert Syst. Appl. 2024, 241, 122638. [Google Scholar] [CrossRef]
- Hu, G.; Huang, F.; Chen, K.; Wei, G. MNEARO: A meta swarm intelligence optimization algorithm for engineering applications. Comput. Methods Appl. Mech. Eng. 2024, 419, 116664. [Google Scholar] [CrossRef]
- Su, H.; Zhao, D.; Heidari, A.A.; Liu, L.; Zhang, X.; Mafarja, M.; Chen, H. RIME: A physics-based optimization. Neurocomputing 2023, 532, 183–214. [Google Scholar] [CrossRef]
- Deng, L.; Liu, S. Snow ablation optimizer: A novel metaheuristic technique for numerical optimization and engineering design. Expert Syst. Appl. 2023, 225, 120069. [Google Scholar] [CrossRef]
- Abdel-Basset, M.; Mohamed, R.; Azeem, S.A.A.; Jameel, M.; Abouhawwash, M. Kepler optimization algorithm: A new metaheuristic algorithm inspired by Kepler’s laws of planetary motion. Knowl.-Based Syst. 2023, 268, 110454. [Google Scholar] [CrossRef]
- Mirjalili, S. SCA: A Sine Cosine Algorithm for solving optimization problems. Knowl.-Based Syst. 2016, 96, 120–133. [Google Scholar] [CrossRef]
- Daoud, M.S.; Shehab, M.; Al-Mimi, H.M.; Abualigah, L.; Zitar, R.A.; Shambour, M.K.Y. Gradient-Based Optimizer (GBO): A Review, Theory, Variants, and Applications. Arch. Comput. Methods Eng. 2020, 540, 131–159. [Google Scholar] [CrossRef]
- Ahmadianfar, I.; Heidari, A.A.; Gandomi, A.H.; Chu, X.F.; Chen, H.L. RUN beyond the metaphor: An efficient optimization algorithm based on Runge Kutta method. Expert Syst. Appl. 2021, 181, 115079. [Google Scholar] [CrossRef]
- Hu, G.; Du, B.; Chen, K.; Wei, G. Super eagle optimization algorithm based three-dimensional ball security corridor planning method for fixed-wing UAVs. Adv. Eng. Inform. 2024, 59, 102354. [Google Scholar] [CrossRef]
- Kar, A.K. Bio inspired computing—A review of algorithms and scope of applications. Expert Syst. Appl. 2016, 59, 20–32. [Google Scholar] [CrossRef]
- Aydilek, I.B. A hybrid firefly and particle swarm optimization algorithm for computationally expensive numerical problems. Appl. Soft Comput. 2018, 66, 232–249. [Google Scholar] [CrossRef]
- Garg, H. A hybrid PSO-GA algorithm for constrained optimization problems. Appl. Math. Comput. 2016, 274, 292–305. [Google Scholar] [CrossRef]
- Hu, G.; Du, B.; Wang, X.F.; Wei, G. An enhanced black widow optimization algorithm for feature selection. Knowl.-Based Syst. 2022, 235, 107638. [Google Scholar] [CrossRef]
- Liu, X.; Li, G.; Yang, H.; Zhang, N.; Wang, L.; Shao, P. Agricultural UAV trajectory planning by incorporating multi-mechanism improved grey wolf optimization algorithm. Expert Syst. Appl. 2023, 233, 120946. [Google Scholar] [CrossRef]
- Fu, Y.; Liu, D.; Chen, J.; He, L. Secretary bird optimization algorithm: A new metaheuristic for solving global optimization problems. Artif. Intell. Rev. 2024, 57, 123. [Google Scholar] [CrossRef]
- Zafar, M.H.; Younus, H.B.; Moosavi, S.K.; Mansoor, M.; Sanfilippo, F. Online PID Tuning of a 3-DoF Robotic Arm Using a Metaheuristic Optimisation Algorithm: A Comparative Analysis. In International Conference on Information and Software Technologies; Springer Nature: Cham, Switzerland, 2023; pp. 25–37. [Google Scholar] [CrossRef]
- Gao, Y. PID-based search algorithm: A novel metaheuristic algorithm based on PID algorithm. Expert Syst. Appl. 2023, 232, 120886. [Google Scholar] [CrossRef]
- Li, Z. A local opposition-learning golden-sine grey wolf optimization algorithm for feature selection in data classification. Appl. Soft Comput. 2023, 142, 110319. [Google Scholar] [CrossRef]
- Chopra, N.; Mohsin Ansari, M. Golden jackal optimization: A novel nature-inspired optimizer for engineering applications. Expert Syst. Appl. 2022, 198, 116924. [Google Scholar] [CrossRef]
- Gad, A.G. Particle Swarm Optimization Algorithm and Its Applications: A Systematic Review. Arch. Comput. Methods Eng. 2022, 29, 2531–2561. [Google Scholar] [CrossRef]
- Zhao, W.; Wang, L.; Zhang, Z.; Mirjalili, S.; Khodadadi, N.; Ge, Q. Quadratic Interpolation Optimization (QIO): A new optimization algorithm based on generalized quadratic interpolation and its applications to real-world engineering problems. Comput. Methods Appl. Mech. Eng. 2023, 417, 116446. [Google Scholar] [CrossRef]
- Sowmya, R.; Premkumar, M.; Jangir, P. Newton-Raphson-based optimizer: A new population-based metaheuristic algorithm for continuous optimization problems. Eng. Appl. Artif. Intell. 2024, 128, 107532. [Google Scholar] [CrossRef]
- Seyyedabbasi, A.; Kiani, F. Sand Cat swarm optimization: A nature-inspired algorithm to solve global optimization problems. Eng. Comput. 2023, 39, 2627–2651. [Google Scholar] [CrossRef]
- Abdel-Basset, M.; Mohamed, R.; Sallam, K.M.; Chakrabortty, R.K. Light Spectrum Optimizer: A Novel Physics-Inspired Metaheuristic Optimization Algorithm. Mathematics 2022, 10, 3466. [Google Scholar] [CrossRef]
- Zhao, W.; Zhang, Z.; Wang, L. Manta ray foraging optimization: An effective bio-inspired optimizer for engineering applications. Eng. Appl. Artif. Intell. 2020, 87, 103300. [Google Scholar] [CrossRef]
- Moosavi, S.K.; Akhter, M.N.; Zafar, M.H.; Mansoor, M. Constraint optimization: Solving engineering design problems using Whale Optimization Algorithm (WOA). In Handbook of Whale Optimization Algorithm; Academic Press: Cambridge, MA, USA, 2024; pp. 193–216. [Google Scholar]
- Heidari, A.A.; Mirjalili, S.; Faris, H.; Aljarah, I.; Mafarja, M.; Chen, H. Harris hawks optimization: Algorithm and applications. Future Gener. Comp. Syst. 2019, 97, 849–872. [Google Scholar] [CrossRef]
- Han, M.; Du, Z.; Yuen, K.F.; Zhu, H.; Li, Y.; Yuan, Q. Walrus optimizer: A novel nature-inspired metaheuristic algorithm. Expert Syst. Appl. 2024, 239, 122413. [Google Scholar] [CrossRef]
- Woods, B.K.S.; Friswell, M.I. Multi-objective geometry optimization of the Fish Bone Active Camber morphing airfoil. J. Intell. Mater. Syst. Struct. 2016, 27, 808–819. [Google Scholar] [CrossRef]
- Hu, G.; Zhu, X.; Wei, G.; Chang, C.T. An improved marine predators algorithm for shape optimization of developable Ball surfaces. Eng. Appl. Artif. Intell. 2021, 105, 104417. [Google Scholar] [CrossRef]
- Qin, X.; Lv, D.; Hu, G.; Wu, J. Subdivision Algorithm of Quartic Q-Ball Curves with Shape Parameters. In Proceedings of the 2018 IEEE 3rd International Conference on Image, Vision and Computing (ICIVC), Chongqing, China, 27–29 June 2018; pp. 711–715. [Google Scholar] [CrossRef]
- Lu, L.; Jiang, C.; Hu, Q. Planar cubic G1 and quintic G2 Hermite interpolations via curvature variation minimization. Comput. Graph. 2018, 70, 92–98. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithms | Proposed Time | Parameters |
|---|---|---|
| BKA | 2024 | Parameter P = 0.9. |
| GJO | 2022 | The constant c1 = 1.5. |
| PSO | 1995 | Cognitive factor c1 = 2, social factor c2 = 2.5, acceleration weight w = 2. |
| PSA | 2024 | Proportion factor Kp = 1, integral factor Ki = 0.5, differential factor Kd = 1.2, levy flight factor of β = 1.5. |
| QIO | 2023 | None |
| NRBO | 2024 | Deciding factor for trap avoidance operator DF = 0.6; |
| SCSO | 2022 | The maximum sensitivity S = 2. |
| SBOA | 2024 | Levy flight factor β = 1.5. |
| MISBOA | — | Levy flight factor β = 1.5, proportion factor Kp = 1, integral factor Ki = 0.5, differential factor Kd = 1.2. |
| Index | BKA | GJO | PSO | PSA | QIO | NRBO | SCSO | SBOA | MISBOA | |
|---|---|---|---|---|---|---|---|---|---|---|
| CEC01 | Ave | 320.52 | 1437.41 | 322.74 | 300.00 | 300.00 | 424.69 | 629.84 | 300.00 | 300.00 |
| Std | 9.79E+01 | 1.26E+03 | 2.05E+01 | 4.09E-14 | 4.78E-08 | 1.31E+02 | 7.70E+02 | 4.48E-14 | 2.59E-14 | |
| Rank | 5 | 9 | 6 | 2 | 4 | 7 | 8 | 3 | 1 | |
| Time | 0.99 | 0.79 | 0.36 | 0.45 | 3.09 | 2.75 | 4.16 | 1.03 | 2.75 | |
| CEC02 | Ave | 411.45 | 438.50 | 405.57 | 410.41 | 406.65 | 424.36 | 431.70 | 404.92 | 402.98 |
| Std | 20.67 | 24.18 | 5.16 | 20.73 | 17.63 | 25.31 | 31.50 | 3.54 | 3.49 | |
| Rank | 6 | 9 | 3 | 5 | 4 | 7 | 8 | 2 | 1 | |
| Time | 1.21 | 0.93 | 0.40 | 0.58 | 3.54 | 2.64 | 4.84 | 1.03 | 3.72 | |
| CEC03 | Ave | 615.80 | 603.44 | 600.01 | 600.00 | 600.00 | 617.38 | 611.65 | 600.00 | 600.00 |
| Std | 8.88E+00 | 2.55E+00 | 8.79E-03 | 1.84E-05 | 4.61E-05 | 6.18E+00 | 7.01E+00 | 3.45E-06 | 0.00E+00 | |
| Rank | 8 | 6 | 5 | 3 | 4 | 9 | 7 | 2 | 1 | |
| Time | 1.50 | 1.04 | 0.60 | 0.77 | 3.37 | 2.28 | 4.01 | 1.33 | 3.42 | |
| CEC04 | Ave | 813.63 | 825.17 | 814.03 | 822.84 | 810.61 | 820.18 | 826.31 | 809.59 | 807.33 |
| Std | 4.95 | 7.31 | 5.95 | 13.24 | 4.00 | 7.80 | 5.86 | 4.55 | 3.26 | |
| Rank | 4 | 8 | 5 | 7 | 3 | 6 | 9 | 2 | 1 | |
| Time | 1.50 | 1.04 | 0.60 | 0.77 | 3.37 | 2.28 | 4.01 | 1.33 | 3.42 | |
| CEC05 | Ave | 995.50 | 936.73 | 900.19 | 915.27 | 900.18 | 968.53 | 1009.84 | 900.00 | 900.00 |
| Std | 6.85E+01 | 3.62E+01 | 2.33E-01 | 2.80E+01 | 4.52E-01 | 7.16E+01 | 1.35E+02 | 2.70E-13 | 0.00E+00 | |
| Rank | 8 | 6 | 4 | 5 | 3 | 7 | 9 | 2 | 1 | |
| Time | 1.06 | 0.85 | 0.41 | 0.59 | 3.50 | 3.64 | 4.74 | 1.05 | 2.71 | |
| CEC06 | Ave | 2086.69 | 7083.45 | 3478.84 | 3362.98 | 1801.11 | 1991.39 | 4725.88 | 3282.25 | 1825.88 |
| Std | 1118.41 | 1627.54 | 2632.62 | 1543.53 | 0.76 | 328.28 | 1984.53 | 1436.34 | 16.18 | |
| Rank | 4 | 9 | 7 | 6 | 1 | 3 | 8 | 5 | 2 | |
| Time | 1.16 | 1.02 | 0.46 | 0.65 | 3.51 | 5.10 | 5.95 | 1.01 | 3.09 | |
| CEC07 | Ave | 2035.31 | 2037.73 | 2013.24 | 2018.92 | 2002.84 | 2044.48 | 2037.13 | 2006.41 | 2003.56 |
| Std | 10.63 | 14.08 | 9.75 | 5.38 | 3.79 | 15.56 | 12.63 | 8.91 | 6.71 | |
| Rank | 6 | 8 | 4 | 5 | 1 | 9 | 7 | 3 | 2 | |
| Time | 2.35 | 1.66 | 1.07 | 1.18 | 4.91 | 10.88 | 7.22 | 2.02 | 5.90 | |
| CEC08 | Ave | 2221.96 | 2225.92 | 2214.48 | 2222.14 | 2211.81 | 2229.52 | 2226.38 | 2211.36 | 2206.67 |
| Std | 8.03 | 4.32 | 9.79 | 20.97 | 10.54 | 4.98 | 4.35 | 10.26 | 9.24 | |
| Rank | 5 | 7 | 4 | 6 | 3 | 9 | 8 | 2 | 1 | |
| Time | 1.86 | 1.20 | 0.80 | 1.01 | 3.38 | 3.51 | 4.18 | 1.84 | 4.63 | |
| CEC09 | Ave | 2543.42 | 2558.71 | 2533.31 | 2529.28 | 2529.28 | 2531.31 | 2549.56 | 2529.28 | 2529.28 |
| Std | 43.08 | 22.24 | 1.06 | 0.00 | 0.00 | 3.15 | 23.20 | 0.00 | 0.00 | |
| Rank | 7 | 9 | 6 | 1 | 4 | 5 | 8 | 2 | 3 | |
| Time | 1.57 | 1.05 | 0.63 | 0.81 | 3.41 | 3.25 | 4.18 | 1.47 | 3.55 | |
| CEC10 | Ave | 2543.71 | 2553.59 | 2542.78 | 2528.25 | 2500.35 | 2556.39 | 2533.86 | 2525.53 | 2507.38 |
| Std | 57.93 | 62.08 | 56.88 | 51.23 | 0.07 | 64.70 | 56.12 | 46.63 | 27.46 | |
| Rank | 7 | 8 | 6 | 4 | 1 | 9 | 5 | 3 | 2 | |
| Time | 1.48 | 1.00 | 0.58 | 0.76 | 3.25 | 3.39 | 4.09 | 1.34 | 3.68 | |
| CEC11 | Ave | 2659.40 | 2822.80 | 2713.43 | 2727.86 | 2600.00 | 2816.16 | 2731.96 | 2638.35 | 2623.33 |
| Std | 124.56 | 179.32 | 160.75 | 173.53 | 0.00 | 159.55 | 158.19 | 104.80 | 89.76 | |
| Rank | 4 | 9 | 5 | 6 | 1 | 8 | 7 | 3 | 2 | |
| Time | 2.27 | 1.47 | 1.04 | 1.17 | 4.47 | 3.97 | 5.15 | 2.20 | 5.52 | |
| CEC12 | Ave | 2864.74 | 2865.07 | 2868.81 | 2865.27 | 2866.15 | 2865.21 | 2865.38 | 2860.36 | 2862.03 |
| Std | 1.80 | 2.36 | 1.12 | 1.96 | 1.83 | 1.28 | 1.92 | 1.60 | 1.67 | |
| Rank | 3 | 4 | 9 | 6 | 8 | 5 | 7 | 1 | 2 | |
| Time | 3.16 | 1.99 | 1.34 | 1.69 | 6.36 | 12.41 | 7.26 | 3.43 | 7.26 | |
| Average rank | 5.58 | 7.67 | 5.33 | 4.67 | 3.08 | 7.00 | 7.58 | 2.50 | 1.58 | |
| Finial rank | 6 | 9 | 5 | 4 | 3 | 7 | 8 | 2 | 1 | |
| Average time | 1.68 | 1.17 | 0.69 | 0.87 | 3.85 | 4.68 | 4.98 | 1.59 | 4.14 | |
| BKA | GJO | PSO | PSA | QIO | NRBO | SCSO | SBOA | |
|---|---|---|---|---|---|---|---|---|
| CEC01 | 6.32E-12/+ | 6.32E-12/+ | 6.32E-12/+ | 8.42E-09/+ | 6.32E-12/+ | 6.32E-12/+ | 6.32E-12/+ | 1.43E-02/+ |
| CEC02 | 2.82E-04/+ | 3.10E-10/+ | 1.67E-03/+ | 1.64E-03/+ | 5.18E-02/= | 1.41E-08/+ | 1.37E-06/+ | 3.66E-04/+ |
| CEC03 | 3.15E-12/+ | 3.15E-12/+ | 3.15E-12/+ | 9.18E-08/+ | 3.15E-12/+ | 3.15E-12/+ | 3.15E-12/+ | 1.58E-02/+ |
| CEC04 | 6.88E-07/+ | 4.78E-11/+ | 4.04E-06/+ | 2.28E-08/+ | 4.17E-04/+ | 1.36E-09/+ | 3.21E-11/+ | 4.24E-02/+ |
| CEC05 | 1.21E-12/+ | 1.21E-12/+ | 1.21E-12/+ | 1.21E-12/+ | 1.21E-12/+ | 1.21E-12/+ | 1.21E-12/+ | 9.04E-13/+ |
| CEC06 | 3.82E-09/+ | 3.02E-11/+ | 7.39E-11/+ | 5.07E-10/+ | 3.02E-11/− | 1.78E-10/+ | 3.02E-11/+ | 3.34E-11/+ |
| CEC07 | 5.49E-11/+ | 3.02E-11/+ | 1.58E-04/+ | 2.19E-08/+ | 5.87E-04/− | 4.50E-11/+ | 4.50E-11/+ | 2.71E-02/+ |
| CEC08 | 2.67E-09/+ | 7.39E-11/+ | 1.43E-05/+ | 5.09E-06/+ | 5.83E-03/+ | 3.02E-11/+ | 7.39E-11/+ | 5.94E-02/+ |
| CEC09 | 5.73E-11/+ | 1.21E-12/+ | 1.21E-12/+ | 2.78E-05/− | 1.21E-12/+ | 1.21E-12/+ | 1.21E-12/+ | 3.34E-01/= |
| CEC10 | 3.50E-09/+ | 1.07E-09/+ | 2.67E-09/+ | 2.67E-09/+ | 1.43E-08/− | 8.10E-10/+ | 2.03E-09/+ | 2.00E-06/= |
| CEC11 | 1.16E-09/+ | 4.85E-10/+ | 5.35E-10/+ | 1.29E-08/+ | 1.88E-09/− | 3.98E-10/+ | 8.71E-10/+ | 8.32E-03/+ |
| CEC12 | 4.62E-08/+ | 4.62E-08/+ | 2.96E-11/+ | 1.14E-07/+ | 2.11E-10/+ | 1.26E-09/+ | 4.92E-09/+ | 2.25E-03/− |
| +/=/− | 12/0/0 | 12/0//0 | 12/0/0 | 11/0/1 | 7/1/4 | 12/0/0 | 12/0/0 | 9/2/1 |
| Index | BKA | GJO | PSO | PSA | QIO | NRBO | SCSO | SBOA | MISBOA | |
|---|---|---|---|---|---|---|---|---|---|---|
| CEC01 | Ave | 791.30 | 11,801.49 | 4525.72 | 300.00 | 473.69 | 6355.33 | 7879.45 | 333.17 | 300.00 |
| Std | 1562.25 | 3673.44 | 1114.88 | 0.00 | 178.77 | 1754.62 | 3915.38 | 33.94 | 0.00 | |
| Rank | 5 | 9 | 6 | 2 | 4 | 7 | 8 | 3 | 1 | |
| Time | 1.01 | 1.00 | 0.43 | 0.69 | 4.89 | 4.55 | 6.98 | 1.05 | 3.29 | |
| CEC02 | Ave | 462.82 | 557.79 | 480.78 | 449.38 | 451.37 | 588.88 | 518.37 | 452.92 | 440.93 |
| Std | 11.70 | 88.91 | 12.19 | 19.88 | 19.27 | 60.80 | 40.44 | 8.68 | 18.84 | |
| Rank | 5 | 8 | 6 | 2.00 | 3 | 9 | 7 | 4 | 1 | |
| Time | 1.09 | 0.99 | 0.42 | 0.68 | 4.99 | 3.87 | 7.14 | 1.12 | 2.93 | |
| CEC03 | Ave | 641.17 | 620.69 | 602.05 | 602.12 | 600.05 | 647.93 | 641.33 | 600.01 | 600.00 |
| Std | 10.43 | 10.60 | 0.73 | 2.74 | 0.15 | 9.47 | 11.23 | 0.04 | 0.00 | |
| Rank | 7 | 6 | 4 | 5 | 3 | 9 | 8 | 2 | 1 | |
| Time | 2.59 | 1.91 | 1.25 | 1.54 | 6.88 | 6.27 | 10.11 | 2.53 | 6.26 | |
| CEC04 | Ave | 859.76 | 887.60 | 902.92 | 855.63 | 836.68 | 900.91 | 884.70 | 827.14 | 831.58 |
| Std | 12.65 | 26.30 | 11.33 | 17.21 | 9.00 | 19.41 | 14.25 | 8.67 | 12.25 | |
| Rank | 5 | 7 | 9 | 4 | 3 | 8 | 6 | 1 | 2 | |
| Time | 1.69 | 1.33 | 0.74 | 1.07 | 6.43 | 6.94 | 21.32 | 1.79 | 4.55 | |
| CEC05 | Ave | 1885.84 | 1623.36 | 1006.72 | 1513.93 | 913.97 | 2078.83 | 2109.87 | 900.03 | 900.02 |
| Std | 392.09 | 321.74 | 98.38 | 393.05 | 11.00 | 437.03 | 359.83 | 0.06 | 0.08 | |
| Rank | 7 | 6 | 4 | 5 | 3 | 8 | 9 | 2 | 1 | |
| Time | 1.62 | 1.36 | 0.73 | 1.10 | 6.09 | 8.25 | 23.38 | 1.41 | 3.90 | |
| CEC06 | Ave | 4933.37 | 4,852,799.47 | 75,196.95 | 4601.02 | 4301.75 | 10,967.32 | 125,429.45 | 7540.34 | 2350.78 |
| Std | 4780.87 | 11,904,051.13 | 200,057.18 | 3400.84 | 2503.06 | 18,029.84 | 386,929.93 | 7325.22 | 881.48 | |
| Rank | 4 | 9 | 7 | 3 | 2 | 6 | 8 | 5 | 1 | |
| Time | 2.44 | 2.06 | 0.99 | 1.44 | 11.43 | 8.47 | 27.42 | 2.48 | 6.87 | |
| CEC07 | Ave | 2094.99 | 2096.21 | 2045.75 | 2074.80 | 2034.29 | 2130.26 | 2118.64 | 2031.69 | 2026.00 |
| Std | 20.09 | 37.95 | 11.40 | 51.21 | 13.09 | 39.39 | 28.80 | 9.82 | 5.86 | |
| Rank | 6 | 7 | 4 | 5 | 3 | 9 | 8 | 2 | 1 | |
| Time | 3.08 | 1.94 | 1.35 | 1.68 | 6.81 | 12.40 | 26.72 | 2.65 | 6.89 | |
| CEC08 | Ave | 2249.56 | 2247.94 | 2246.59 | 2254.94 | 2222.84 | 2292.85 | 2247.05 | 2222.79 | 2221.58 |
| Std | 45.64 | 41.35 | 36.40 | 52.01 | 4.84 | 58.32 | 34.71 | 1.65 | 0.92 | |
| Rank | 7 | 6 | 4 | 8 | 3 | 9 | 5 | 2 | 1 | |
| Time | 3.39 | 2.15 | 1.63 | 1.99 | 7.02 | 13.45 | 27.18 | 3.04 | 7.67 | |
| CEC09 | Ave | 2506.20 | 2551.08 | 2488.33 | 2480.78 | 2480.78 | 2552.55 | 2527.15 | 2480.78 | 2480.78 |
| Std | 63.53 | 39.97 | 1.86 | 0.00 | 0.00 | 39.51 | 37.19 | 0.00 | 0.00 | |
| Rank | 6 | 8 | 5 | 3 | 4 | 9 | 7 | 2 | 1 | |
| Time | 2.84 | 1.94 | 1.36 | 1.78 | 6.86 | 11.80 | 26.20 | 2.59 | 6.31 | |
| CEC10 | Ave | 3521.79 | 3610.37 | 2944.78 | 2669.55 | 2507.00 | 3380.06 | 3176.59 | 2530.12 | 2522.89 |
| Std | 1013.07 | 1469.48 | 465.33 | 183.17 | 34.71 | 1308.25 | 1051.78 | 54.78 | 51.38 | |
| Rank | 8 | 9 | 5 | 4 | 1 | 7 | 6 | 3 | 2 | |
| Time | 2.42 | 1.68 | 1.10 | 1.45 | 6.45 | 10.67 | 22.19 | 2.11 | 5.53 | |
| CEC11 | Ave | 3380.09 | 4052.40 | 2982.61 | 2916.67 | 2935.35 | 3940.42 | 3483.37 | 2952.02 | 2906.67 |
| Std | 724.80 | 390.72 | 126.19 | 74.66 | 110.57 | 290.98 | 386.07 | 111.55 | 94.44 | |
| Rank | 6 | 9 | 5 | 2 | 3 | 8 | 7 | 4 | 1 | |
| Time | 3.48 | 2.35 | 1.78 | 2.22 | 7.20 | 13.48 | 23.89 | 7.53 | 3.18 | |
| CEC12 | Ave | 3017.43 | 2993.92 | 3016.04 | 2969.80 | 2978.36 | 3009.53 | 3019.32 | 2939.76 | 2900.00 |
| Std | 58.80 | 37.88 | 18.18 | 27.28 | 20.94 | 47.79 | 61.23 | 4.98 | 0.00 | |
| Rank | 8 | 5 | 7 | 3 | 4 | 6 | 9 | 2 | 1 | |
| Time | 3.95 | 2.61 | 1.97 | 2.46 | 8.31 | 14.44 | 23.61 | 3.51 | 8.39 | |
| Average rank | 6.17 | 7.42 | 5.50 | 3.83 | 3.00 | 7.92 | 7.33 | 2.67 | 1.17 | |
| Finial rank | 6 | 8 | 5 | 4 | 3 | 9 | 7 | 2 | 1 | |
| Average time | 2.47 | 1.78 | 1.15 | 1.51 | 6.95 | 9.55 | 20.51 | 2.65 | 5.48 | |
| BKA | GJO | PSO | PSA | QIO | NRBO | SCSO | SBOA | |
|---|---|---|---|---|---|---|---|---|
| CEC01 | 3.02E-11/+ | 3.02E-11/+ | 3.02E-11/+ | 1.60E-07/+ | 3.02E-11/+ | 3.02E-11/+ | 3.02E-11/+ | 3.02E-11/+ |
| CEC02 | 1.84E-07/+ | 3.24E-11/+ | 3.96E-11/+ | 8.96E-04/+ | 1.51E-05/+ | 2.93E-11/+ | 3.96E-11/+ | 1.53E-08/+ |
| CEC03 | 2.27E-11/+ | 2.27E-11/+ | 2.27E-11/+ | 2.27E-11/+ | 2.27E-11/+ | 2.27E-11/+ | 2.27E-11/+ | 7.47E-09/+ |
| CEC04 | 7.12E-09/+ | 1.21E-10/+ | 3.02E-11/+ | 2.67E-07/+ | 3.39E-02/+ | 3.02E-11/+ | 3.69E-11/+ | 1.76E-01/= |
| CEC05 | 2.66E-11/+ | 2.66E-11/+ | 2.66E-11/+ | 2.66E-11/+ | 3.60E-11/+ | 2.66E-11/+ | 2.66E-11/+ | 2.19E-08/+ |
| CEC06 | 4.42E-06/+ | 3.69E-11/+ | 4.57E-09/+ | 6.38E-03/+ | 5.87E-04/+ | 7.74E-06/+ | 1.20E-08/+ | 1.49E-06/+ |
| CEC07 | 3.02E-11/+ | 3.34E-11/+ | 1.07E-09/+ | 2.15E-10/+ | 2.84E-04/+ | 3.02E-11/+ | 3.02E-11/+ | 1.33E-02/+ |
| CEC08 | 3.34E-11/+ | 3.02E-11/+ | 3.34E-11/+ | 8.88E-06/+ | 2.28E-01/= | 3.02E-11/+ | 3.02E-11/+ | 5.26E-04/+ |
| CEC09 | 8.87E-12/+ | 8.87E-12/+ | 8.87E-12/+ | 8.87E-12/+ | 8.87E-12/+ | 8.87E-12/+ | 8.87E-12/+ | 8.86E-12/+ |
| CEC10 | 8.48E-09/+ | 1.31E-08/+ | 1.01E-08/+ | 3.08E-08/+ | 6.74E-06/− | 7.09E-08/+ | 2.38E-07/+ | 8.56E-04/+ |
| CEC11 | 2.36E-04/+ | 2.02E-11/+ | 9.63E-02/= | 1.46E-01/= | 5.92E-02/= | 2.02E-11/+ | 2.67E-10/+ | 2.13E-01/= |
| CEC12 | 3.02E-11/+ | 3.02E-11/+ | 3.02E-11/+ | 3.02E-11/+ | 3.02E-11/+ | 3.02E-11/+ | 3.02E-11/+ | 3.02E-11/+ |
| +/=/− | 12/0/0 | 12/0/0 | 11/1/0 | 11/1/0 | 9/2/1 | 12/0/0 | 12/0/0 | 10/2/0 |
| Algorithms | The Best | The Average | The Worst | The Std | Rank |
|---|---|---|---|---|---|
| MISBOA | 9.80015 | 9.80015 | 9.80015 | 8.64E-11 | 1 |
| SBOA | 9.80015 | 9.80016 | 9.80019 | 1.48E-05 | 2 |
| HHO | 9.82369 | 9.98223 | 10.30760 | 1.50E-01 | 8 |
| PSO | 10.05302 | 10.32013 | 10.59591 | 1.82E-01 | 10 |
| SCSO | 10.38607 | 12.60736 | 15.24964 | 1.69E+00 | 13 |
| PSA | 9.80095 | 9.90024 | 10.02584 | 9.08E-02 | 6 |
| QIO | 9.80028 | 9.80087 | 9.80183 | 5.40E-04 | 3 |
| BKA | 9.80709 | 10.15584 | 11.20607 | 5.61E-01 | 9 |
| GJO | 9.85004 | 9.90851 | 9.99557 | 4.78E-02 | 7 |
| WO | 9.80062 | 9.80902 | 9.83530 | 1.09E-02 | 4 |
| NRBO | 9.93519 | 10.35455 | 10.83489 | 2.89E-01 | 11 |
| GWO | 9.81930 | 9.83887 | 9.87625 | 2.37E-02 | 5 |
| WOA | 10.43362 | 11.85415 | 14.78914 | 1.50E+00 | 12 |
| Algorithms | x1 (d1) | x2 (d2) | x3 (d3) | x4 (d4) | x5 (w) |
|---|---|---|---|---|---|
| MISBOA | 20.5427 | 28.2575 | 50.7967 | 84.4957 | 90.0000 |
| SBOA | 20.5427 | 28.2575 | 50.7967 | 84.4957 | 90.0000 |
| HHO | 20.5671 | 28.4052 | 50.8662 | 84.5135 | 89.9810 |
| PSO | 20.0943 | 29.7522 | 51.2044 | 85.2100 | 89.3350 |
| SCSO | 18.6324 | 30.8902 | 52.2056 | 86.8985 | 87.5718 |
| PSA | 20.5424 | 28.2597 | 50.8006 | 84.5021 | 89.9932 |
| QIO | 20.5428 | 28.2577 | 50.7974 | 84.4962 | 89.9998 |
| BKA | 20.5745 | 28.2576 | 50.8071 | 84.5254 | 90.0000 |
| GJO | 20.7429 | 28.3120 | 50.9868 | 84.6088 | 90.0000 |
| WO | 20.5445 | 28.2606 | 50.7974 | 84.4975 | 89.9988 |
| NRBO | 22.3892 | 28.2576 | 50.7968 | 84.5012 | 89.9998 |
| GWO | 20.5880 | 28.3594 | 50.8323 | 84.5390 | 90.0000 |
| WOA | 24.8581 | 29.2136 | 53.0311 | 85.2885 | 89.1611 |
| Algorithms | The Best | The Average | The Worst | The Std | Rank |
|---|---|---|---|---|---|
| MISBOA | 0.5269 | 0.5348 | 0.5438 | 0.0070 | 1 |
| SBOA | 0.5332 | 0.5367 | 0.5371 | 0.0012 | 3 |
| HHO | 0.5264 | 0.5363 | 0.5590 | 0.0091 | 2 |
| PSO | 0.5300 | 0.5410 | 0.5567 | 0.0084 | 5 |
| SCSO | 0.5371 | 0.9698 | 1.6232 | 0.3639 | 13 |
| PSA | 0.5273 | 0.5639 | 0.7066 | 0.0533 | 9 |
| QIO | 0.5296 | 0.5378 | 0.5565 | 0.0082 | 4 |
| BKA | 0.5258 | 0.5841 | 0.9832 | 0.1415 | 10 |
| GJO | 0.5263 | 0.5412 | 0.5546 | 0.0083 | 6 |
| WO | 0.5371 | 0.5531 | 0.6004 | 0.0210 | 8 |
| NRBO | 0.5371 | 0.5991 | 0.8486 | 0.1109 | 12 |
| GWO | 0.5305 | 0.5428 | 0.5555 | 0.0086 | 7 |
| WOA | 0.5258 | 0.5988 | 1.1248 | 0.1851 | 11 |
| Algorithms | x1 (N1) | x2 (N2) | x3 (N3) | x4 (N4) | x5 (N5) | x6 (N6) | x7 (p) | x8 (m1) | x9 (m2) |
|---|---|---|---|---|---|---|---|---|---|
| MISBOA | 37.97 | 26.22 | 22.80 | 24.27 | 23.54 | 87.44 | 3 | 2.00 | 2.00 |
| SBOA | 29.65 | 14.44 | 15.14 | 23.42 | 17.38 | 83.43 | 3 | 3.00 | 2.00 |
| HHO | 45.30 | 36.27 | 36.79 | 32.61 | 38.78 | 120.10 | 3 | 1.75 | 1.75 |
| PSO | 34.79 | 21.30 | 21.17 | 25.22 | 21.31 | 91.40 | 3 | 2.25 | 1.75 |
| SCSO | 29.13 | 16.91 | 14.33 | 16.51 | 19.09 | 61.85 | 3 | 1.75 | 1.75 |
| PSA | 41.53 | 30.21 | 23.72 | 23.51 | 13.51 | 86.87 | 3 | 2.00 | 2.25 |
| QIO | 32.24 | 20.60 | 22.03 | 23.53 | 14.39 | 86.52 | 3 | 2.50 | 2.00 |
| BKA | 34.82 | 25.65 | 25.32 | 23.51 | 21.77 | 87.33 | 3 | 1.75 | 1.75 |
| GJO | 36.84 | 22.21 | 20.38 | 23.60 | 15.43 | 86.79 | 3 | 2.00 | 1.75 |
| WO | 28.55 | 17.30 | 14.05 | 16.51 | 13.51 | 61.64 | 5 | 1.75 | 1.75 |
| NRBO | 28.02 | 19.14 | 15.93 | 16.51 | 16.92 | 62.24 | 3 | 1.75 | 1.75 |
| GWO | 52.65 | 22.10 | 14.28 | 23.91 | 19.59 | 86.97 | 3 | 1.75 | 1.75 |
| WOA | 34.52 | 25.60 | 24.57 | 24.28 | 19.87 | 87.06 | 3 | 1.75 | 1.75 |
| Algorithms | The Best | The Average | The Worst | The Std | Rank |
|---|---|---|---|---|---|
| MISBOA | 2.5596 | 2.9459 | 3.3890 | 0.2267 | 1 |
| SBOA | 2.6154 | 3.0286 | 3.4375 | 0.3525 | 2 |
| HHO | 3.7227 | 14.7582 | 79.5867 | 23.7816 | 12 |
| PSO | 3.3858 | 4.4163 | 5.2854 | 0.6725 | 8 |
| SCSO | 6.8012 | 254.0620 | 1417.0476 | 462.3691 | 13 |
| PSA | 2.8181 | 3.7524 | 5.5934 | 0.8160 | 6 |
| QIO | 3.2198 | 3.7341 | 4.6100 | 0.4506 | 5 |
| BKA | 2.6099 | 3.3315 | 4.3028 | 0.5159 | 3 |
| GJO | 2.8372 | 3.8936 | 4.9890 | 0.6637 | 7 |
| WO | 3.0550 | 4.5285 | 5.9751 | 0.9301 | 9 |
| NRBO | 2.5948 | 5.8424 | 15.3426 | 3.6253 | 10 |
| GWO | 3.4269 | 3.7197 | 4.0471 | 0.2179 | 4 |
| WOA | 3.0753 | 6.1437 | 9.8143 | 2.0333 | 11 |
| Algorithms | x1 (a) | x2 (b) | x3 (c) | x4 (e) | x5 (f) | x6 (l) | x7 (d) |
|---|---|---|---|---|---|---|---|
| MISBOA | 149.78 | 149.48 | 200.00 | 0.17 | 147.82 | 101.50 | 2.32 |
| SBOA | 150.00 | 149.84 | 200.00 | 0.00 | 10.10 | 105.01 | 1.60 |
| HHO | 149.99 | 149.17 | 160.93 | 0.04 | 27.52 | 129.18 | 1.77 |
| PSO | 136.95 | 130.70 | 180.44 | 5.97 | 134.17 | 107.89 | 2.42 |
| SCSO | 120.55 | 108.47 | 109.46 | 11.36 | 10.00 | 113.75 | 1.68 |
| PSA | 146.24 | 137.89 | 200.00 | 8.09 | 126.20 | 108.51 | 2.29 |
| QIO | 134.48 | 132.96 | 197.78 | 1.03 | 147.67 | 115.51 | 2.44 |
| BKA | 149.97 | 149.83 | 198.44 | 0.00 | 148.88 | 103.50 | 2.39 |
| GJO | 150.00 | 149.81 | 195.32 | 0.00 | 46.06 | 108.24 | 1.80 |
| WO | 150.00 | 148.54 | 200.00 | 0.50 | 92.26 | 132.93 | 2.12 |
| NRBO | 150.00 | 149.76 | 199.99 | 0.09 | 11.80 | 103.79 | 1.60 |
| GWO | 148.03 | 145.10 | 197.54 | 0.49 | 150.00 | 151.07 | 2.53 |
| WOA | 145.91 | 145.51 | 187.74 | 0.00 | 10.73 | 116.18 | 1.66 |
| Algorithms | The Best | The Average | The Worst | The Std | Rank |
|---|---|---|---|---|---|
| MISBOA | 49.80 | 35,629.56 | 137,738.51 | 42,104.67 | 1 |
| SBOA | 43.50 | 53,388.20 | 250,878.33 | 100,100.08 | 2 |
| HHO | 168,279.45 | 350,597.52 | 464,185.35 | 93,312.90 | 7 |
| PSO | 15,548.11 | 106,639.29 | 399,268.03 | 118,788.06 | 4 |
| SCSO | 567,902.76 | 1,171,784.84 | 2,793,481.23 | 623,190.16 | 13 |
| PSA | 12,274.68 | 162,340.57 | 717,276.47 | 213,572.86 | 5 |
| QIO | 46.52 | 60,161.92 | 256,594.48 | 98,071.12 | 3 |
| BKA | 9839.23 | 374,880.35 | 607,695.76 | 231,737.41 | 9 |
| GJO | 68,095.24 | 364,278.70 | 644,579.00 | 192,960.40 | 8 |
| WO | 154,445.43 | 403,588.62 | 581,976.98 | 156,748.27 | 10 |
| NRBO | 117,747.19 | 884,329.98 | 2,232,288.75 | 662,328.94 | 11 |
| GWO | 51.09 | 213,894.36 | 415,612.84 | 140,816.71 | 6 |
| WOA | 714,462.55 | 1,112,066.60 | 1,640,079.66 | 322,925.94 | 12 |
| Algorithms | x1 (Np1) | x2 (Np2) | x3 (Np3) | x4 (Np4) | x5 (Ng1) | x6 (Ng2) | x7 (Ng3) | x8 (Ng4) |
|---|---|---|---|---|---|---|---|---|
| MISBOA | 21 | 15 | 23 | 25 | 51 | 36 | 54 | 37 |
| SBOA | 20 | 15 | 20 | 22 | 43 | 35 | 40 | 43 |
| HHO | 10 | 14 | 40 | 14 | 43 | 23 | 41 | 38 |
| PSO | 25 | 21 | 23 | 40 | 56 | 59 | 50 | 58 |
| SCSO | 13 | 7 | 7 | 17 | 27 | 17 | 21 | 22 |
| PSA | 21 | 39 | 20 | 34 | 73 | 51 | 64 | 46 |
| QIO | 21 | 23 | 18 | 23 | 53 | 49 | 36 | 42 |
| BKA | 18 | 18 | 8 | 16 | 25 | 40 | 22 | 37 |
| GJO | 17 | 16 | 22 | 11 | 40 | 52 | 57 | 11 |
| WO | 7 | 46 | 12 | 13 | 25 | 49 | 30 | 27 |
| NRBO | 25 | 17 | 12 | 13 | 47 | 48 | 12 | 48 |
| GWO | 16 | 25 | 21 | 17 | 35 | 54 | 38 | 39 |
| WOA | 12 | 15 | 7 | 7 | 12 | 18 | 37 | 22 |
| Algorithms | x9 (b1) | x10 (b2) | x11 (b3) | x12 (b4) | x13 (xp1) | x14 (xg1) | x15 (xg2) | x16 (xg3) |
| MISBOA | 3.175 | 3.175 | 3.175 | 3.175 | 88.9 | 38.1 | 50.8 | 38.1 |
| SBOA | 3.175 | 3.175 | 3.175 | 3.175 | 38.1 | 50.8 | 63.5 | 38.1 |
| HHO | 3.175 | 3.175 | 3.175 | 3.175 | 25.4 | 50.8 | 50.8 | 38.1 |
| PSO | 3.175 | 3.175 | 3.175 | 3.175 | 25.4 | 76.2 | 76.2 | 50.8 |
| SCSO | 3.175 | 3.175 | 3.175 | 3.175 | 38.1 | 12.7 | 63.5 | 25.4 |
| PSA | 3.175 | 3.175 | 3.175 | 3.175 | 50.8 | 76.2 | 88.9 | 50.8 |
| QIO | 3.175 | 3.175 | 3.175 | 3.175 | 76.2 | 50.8 | 50.8 | 38.1 |
| BKA | 3.175 | 3.175 | 5.715 | 3.175 | 63.5 | 25.4 | 38.1 | 38.1 |
| GJO | 3.175 | 3.175 | 3.175 | 5.715 | 25.4 | 38.1 | 63.5 | 50.8 |
| WO | 5.715 | 3.175 | 3.175 | 3.175 | 50.8 | 88.9 | 50.8 | 25.4 |
| NRBO | 3.175 | 3.175 | 8.255 | 3.175 | 38.1 | 50.8 | 76.2 | 76.2 |
| GWO | 3.175 | 3.175 | 3.175 | 3.175 | 50.8 | 50.8 | 50.8 | 25.4 |
| WOA | 5.715 | 3.175 | 3.175 | 3.175 | 38.1 | 12.7 | 38.1 | 12.7 |
| Algorithms | x17 (xg4) | x18 (yp1) | x19 (yg1) | x20 (yg2) | x21 (yg3) | x22 (yg4) | ||
| MISBOA | 50.8 | 50.8 | 50.8 | 76.2 | 50.8 | 50.8 | ||
| SBOA | 38.1 | 101.6 | 63.5 | 63.5 | 63.5 | 50.8 | ||
| HHO | 38.1 | 76.2 | 38.1 | 50.8 | 25.4 | 38.1 | ||
| PSO | 88.9 | 88.9 | 50.8 | 76.2 | 50.8 | 76.2 | ||
| SCSO | 12.7 | 12.7 | 12.7 | 12.7 | 38.1 | 25.4 | ||
| PSA | 63.5 | 12.7 | 63.5 | 50.8 | 76.2 | 63.5 | ||
| QIO | 50.8 | 25.4 | 63.5 | 76.2 | 38.1 | 50.8 | ||
| BKA | 38.1 | 25.4 | 38.1 | 63.5 | 63.5 | 63.5 | ||
| GJO | 50.8 | 12.7 | 50.8 | 50.8 | 50.8 | 12.7 | ||
| WO | 25.4 | 101.6 | 76.2 | 38.1 | 76.2 | 76.2 | ||
| NRBO | 76.2 | 63.5 | 25.4 | 38.1 | 38.1 | 76.2 | ||
| GWO | 50.8 | 25.4 | 76.2 | 76.2 | 50.8 | 76.2 | ||
| WOA | 63.5 | 38.1 | 38.1 | 12.7 | 12.7 | 25.4 |
| Algorithms | The Best | The Average | The Worst | The Std | Rank |
|---|---|---|---|---|---|
| MISBOA | 7.3535 | 7.4945 | 7.6473 | 0.0829 | 1 |
| SBOA | 7.3659 | 7.5073 | 7.6431 | 0.0941 | 2 |
| HHO | 7.7392 | 8.2628 | 8.9568 | 0.3604 | 11 |
| PSO | 7.6862 | 7.9092 | 8.1677 | 0.1372 | 8 |
| SCSO | 8.1210 | 8.5124 | 8.9007 | 0.2366 | 13 |
| PSA | 7.5284 | 7.8043 | 8.2786 | 0.2163 | 7 |
| QIO | 7.5307 | 7.6551 | 7.7299 | 0.0653 | 3 |
| BKA | 7.5619 | 7.7585 | 8.0241 | 0.1609 | 5 |
| GJO | 7.8943 | 8.2646 | 8.5822 | 0.2020 | 12 |
| WO | 7.5249 | 7.7156 | 7.8352 | 0.1005 | 4 |
| NRBO | 7.6937 | 7.9233 | 8.2097 | 0.1570 | 9 |
| GWO | 7.6019 | 8.0283 | 8.6042 | 0.3257 | 10 |
| WOA | 7.5243 | 7.7743 | 7.9464 | 0.1348 | 6 |
| Algorithms | The Best | The Average | The Worst | The Std | Rank |
|---|---|---|---|---|---|
| MISBOA | 25,999.74440 | 25,999.74440 | 25,999.74442 | 5.3021E-06 | 1 |
| SBOA | 25,999.76483 | 26,000.06963 | 26,000.85249 | 3.6657E-01 | 5 |
| HHO | 25,999.74440 | 25,999.74494 | 25,999.74760 | 1.0275E-03 | 2 |
| PSO | 26,025.83962 | 26,044.24748 | 26,074.01958 | 1.2059E+01 | 13 |
| SCSO | 25,999.74463 | 25,999.78421 | 25,999.94426 | 6.3569E-02 | 4 |
| PSA | 26,018.82949 | 26,028.23579 | 26,040.48786 | 7.5703E+00 | 12 |
| QIO | 25,999.74440 | 26,000.12618 | 26,001.97965 | 6.8187E-01 | 7 |
| BKA | 25,999.74534 | 26,001.61971 | 26,004.55399 | 1.9536E+00 | 8 |
| GJO | 26,003.03461 | 26,009.58403 | 26,016.95296 | 5.5396E+00 | 10 |
| WO | 25,999.74441 | 26,000.11604 | 26,001.53414 | 7.1334E-01 | 6 |
| NRBO | 25,999.74441 | 25,999.76224 | 25,999.87262 | 4.0222E-02 | 3 |
| GWO | 26,016.19124 | 26,026.47146 | 26,061.95977 | 1.3641E+01 | 11 |
| WOA | 25,999.76399 | 26,006.30961 | 26,018.65573 | 6.5048E+00 | 9 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qin, S.; Liu, J.; Bai, X.; Hu, G. A Multi-Strategy Improvement Secretary Bird Optimization Algorithm for Engineering Optimization Problems. Biomimetics 2024, 9, 478. https://doi.org/10.3390/biomimetics9080478
Qin S, Liu J, Bai X, Hu G. A Multi-Strategy Improvement Secretary Bird Optimization Algorithm for Engineering Optimization Problems. Biomimetics. 2024; 9(8):478. https://doi.org/10.3390/biomimetics9080478
Chicago/Turabian StyleQin, Song, Junling Liu, Xiaobo Bai, and Gang Hu. 2024. "A Multi-Strategy Improvement Secretary Bird Optimization Algorithm for Engineering Optimization Problems" Biomimetics 9, no. 8: 478. https://doi.org/10.3390/biomimetics9080478
APA StyleQin, S., Liu, J., Bai, X., & Hu, G. (2024). A Multi-Strategy Improvement Secretary Bird Optimization Algorithm for Engineering Optimization Problems. Biomimetics, 9(8), 478. https://doi.org/10.3390/biomimetics9080478