
Aerodynamic/Hydrodynamic Investigation of Water Cross-Over for a Bionic Unmanned Aquatic–Aerial Amphibious Vehicle


Abstract
1. Introduction
2. Bionic Conceptual Design of Water Cross-Over
- During underwater diving, the pectoral fins and tail fins are folded against both sides of the body to reduce resistance and maintain stability;
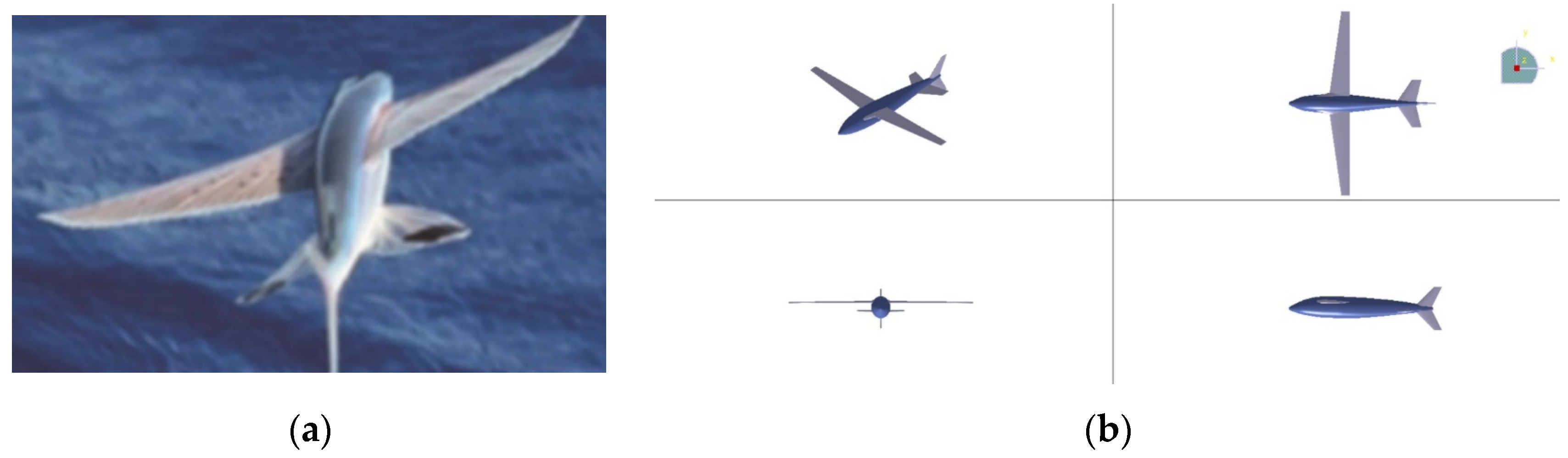
- While gliding in the air, the pectoral fins and tail fins are fully extended, resembling fixed-wing aircraft;
- When crossing over the water, the pectoral fins extend only while the tail fins deflect, creating a configuration similar to the acceleration process on the water of the seaplane.
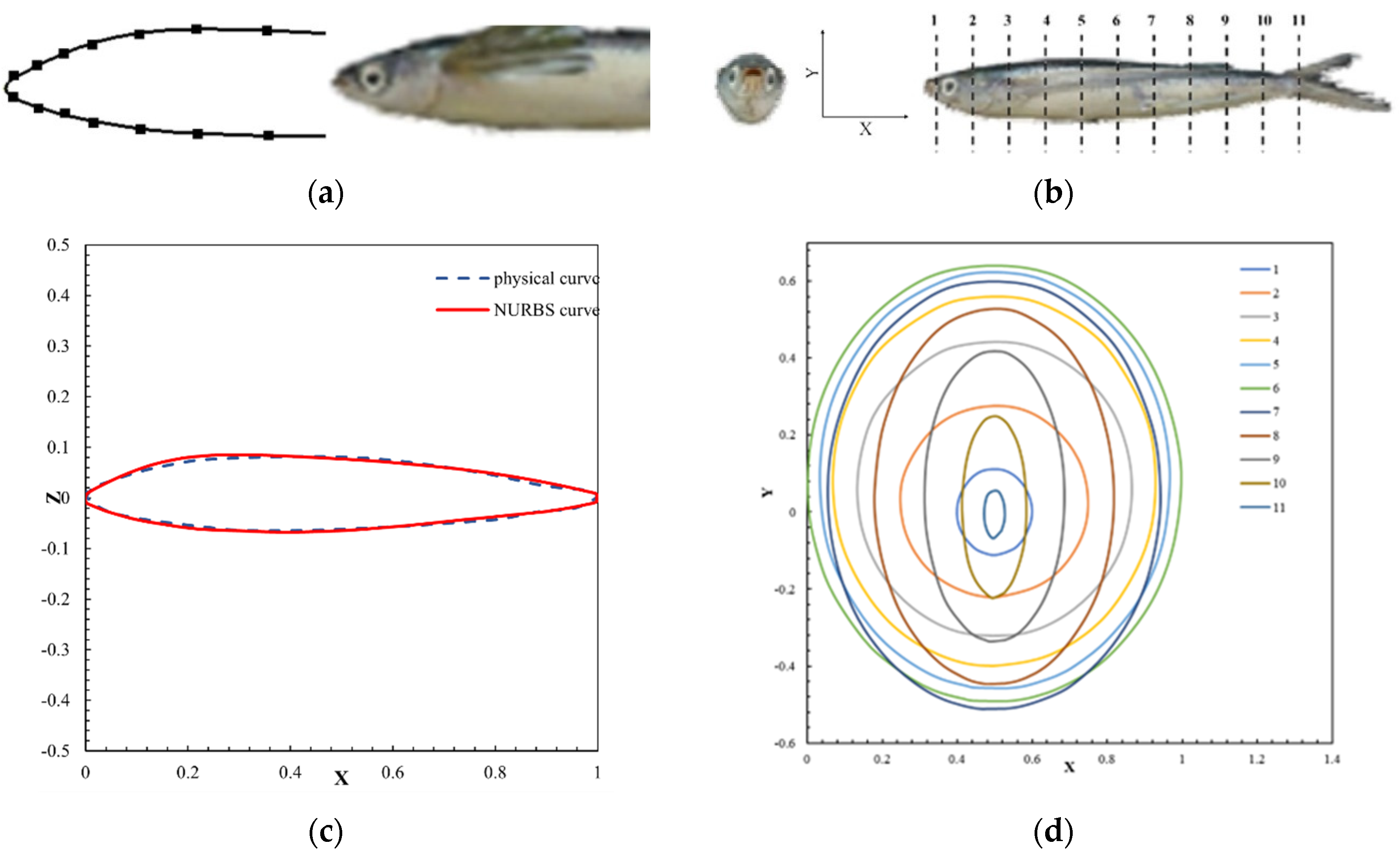
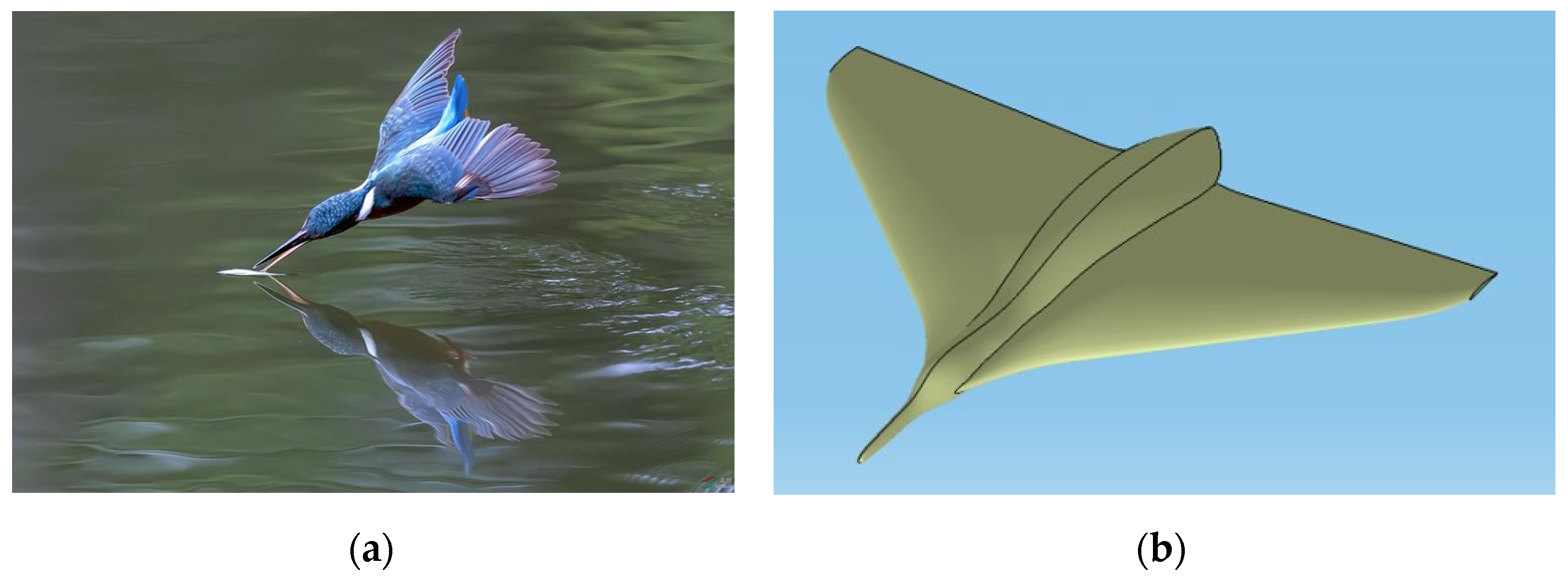
2.1. Bionic Fuselage Design and Modeling
2.2. Configuration of Underwater Diving and Water Cross-Over Process
2.3. Configuration of Acceleration Process on the Water
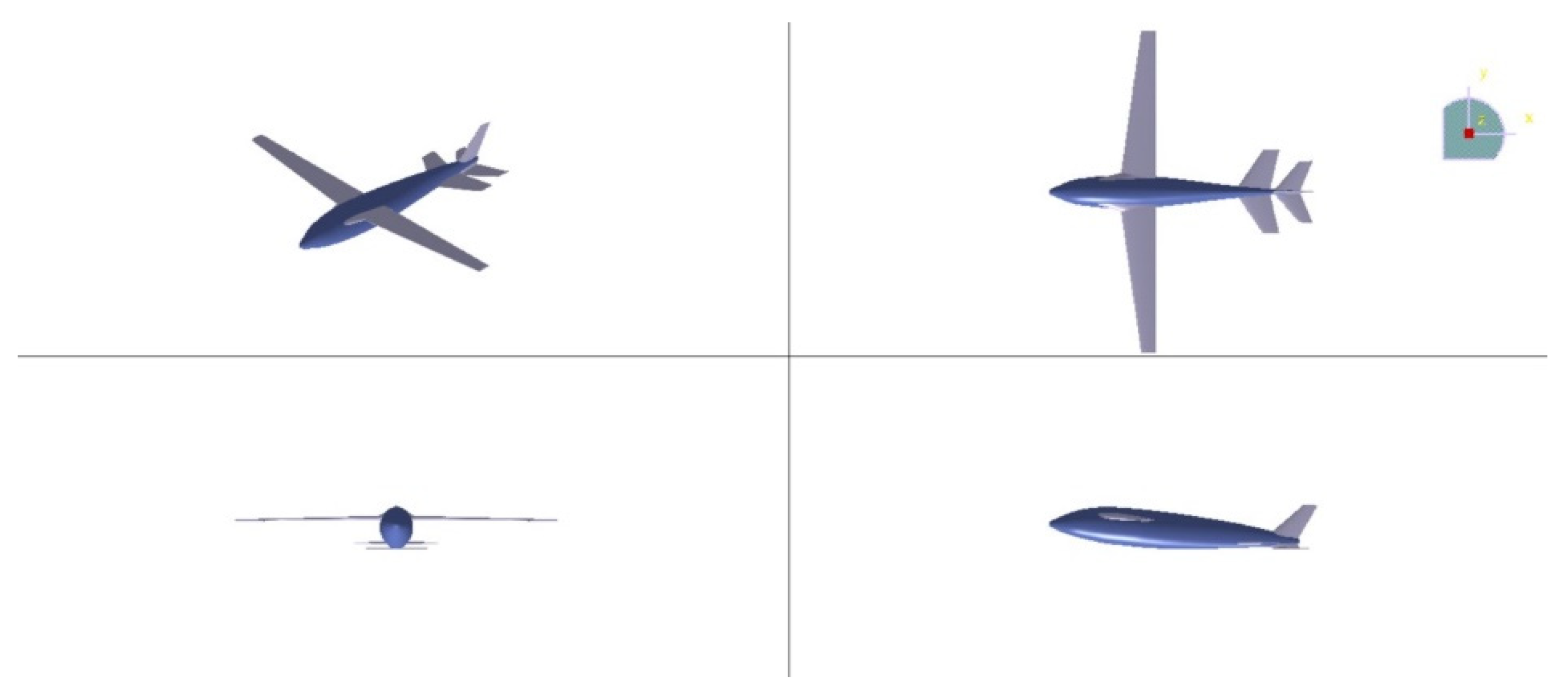
2.4. Configuration of Air-Balanced Flight
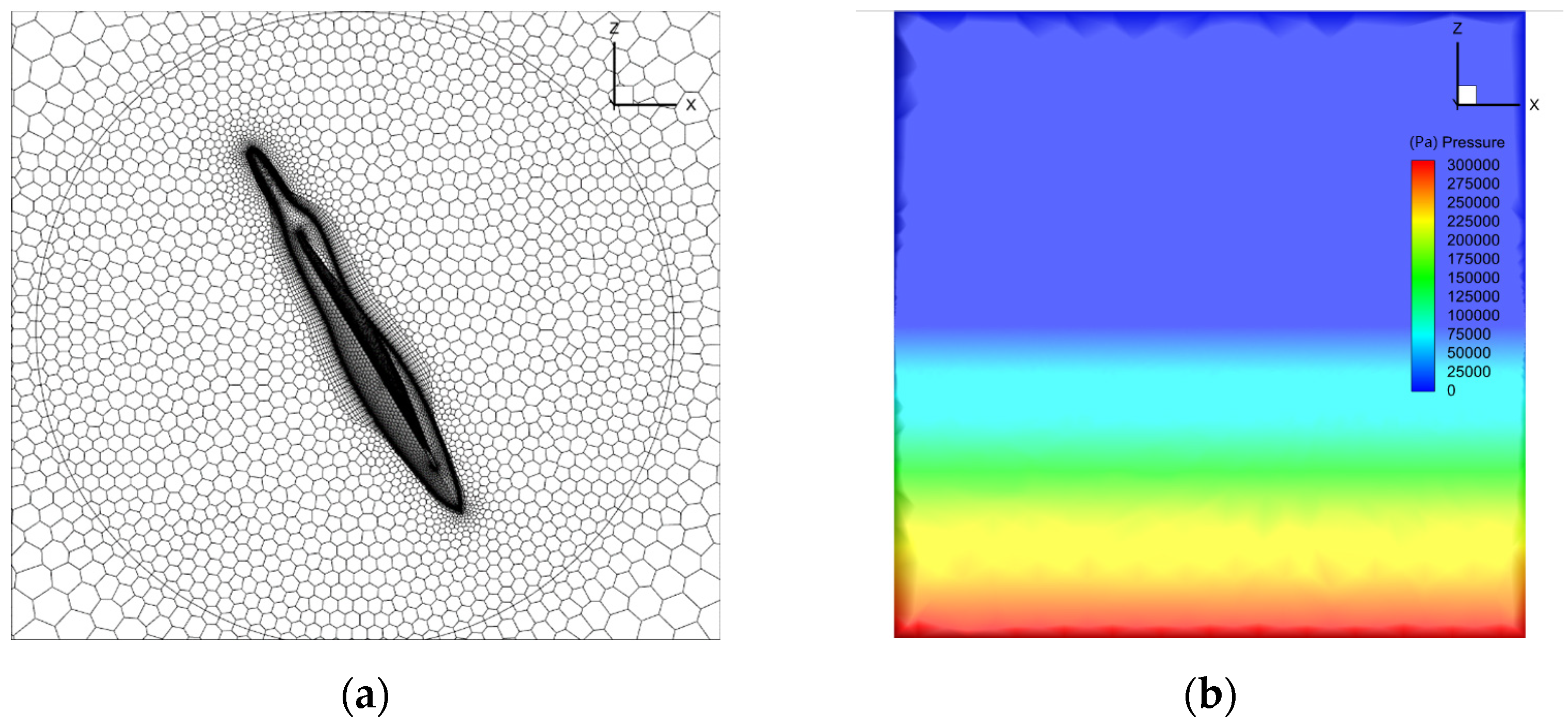
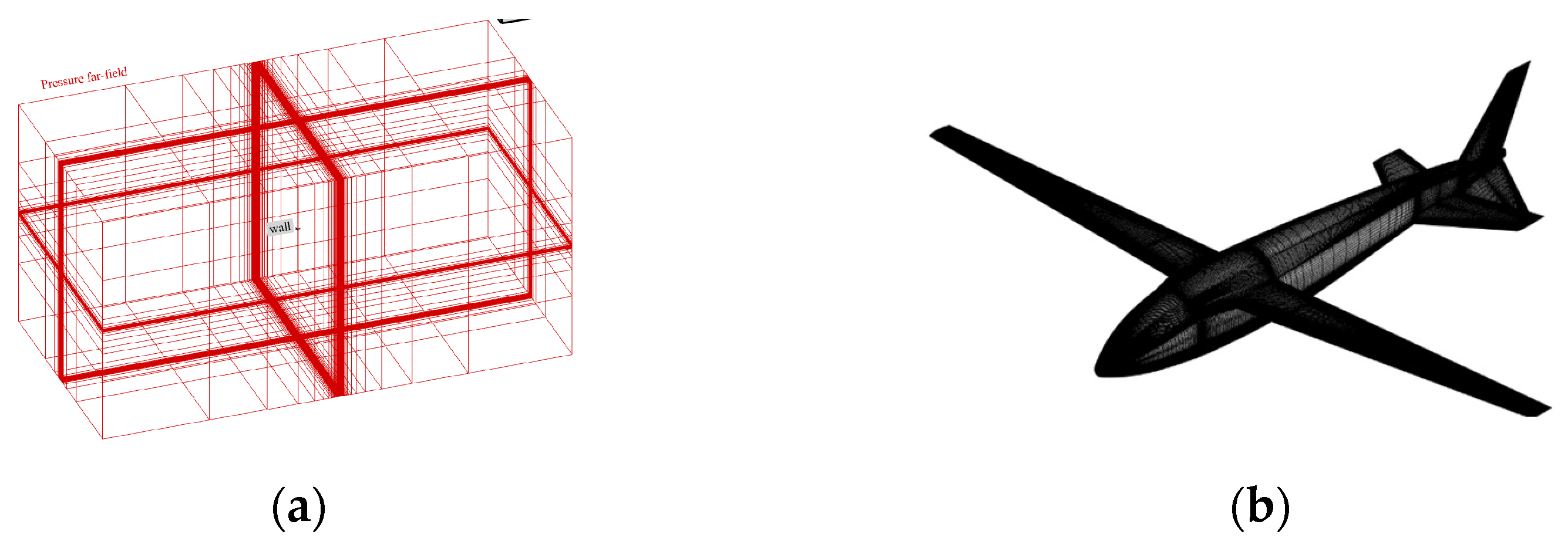
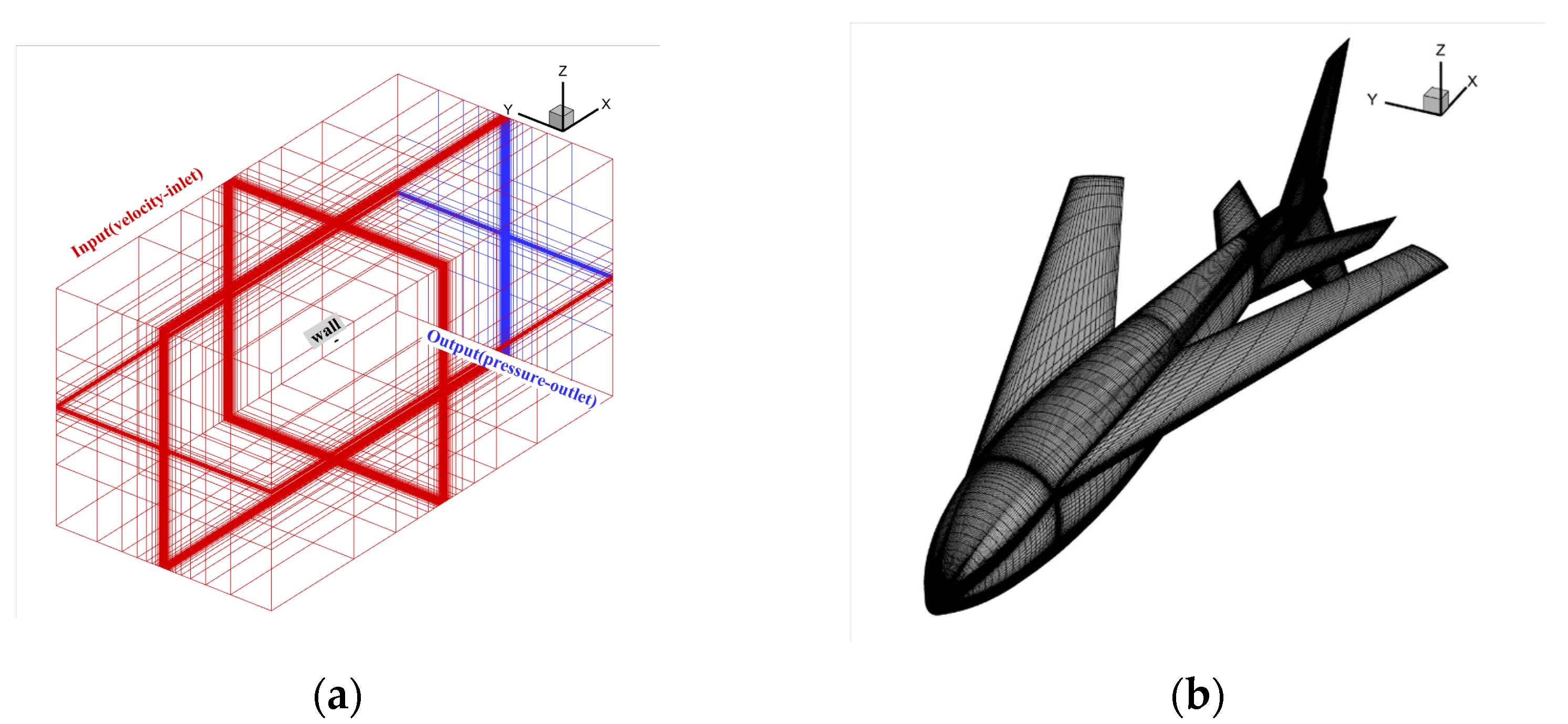
3. The Numerical Methods
3.1. The Modified SST Model
3.2. The VOF Model
3.3. Validation
4. Performance of Underwater Navigation and Air-Balanced Flight
4.1. Longitudinal Hydrodynamic Performance of Underwater Navigation
4.2. Lateral Heading Performance of Underwater Navigation
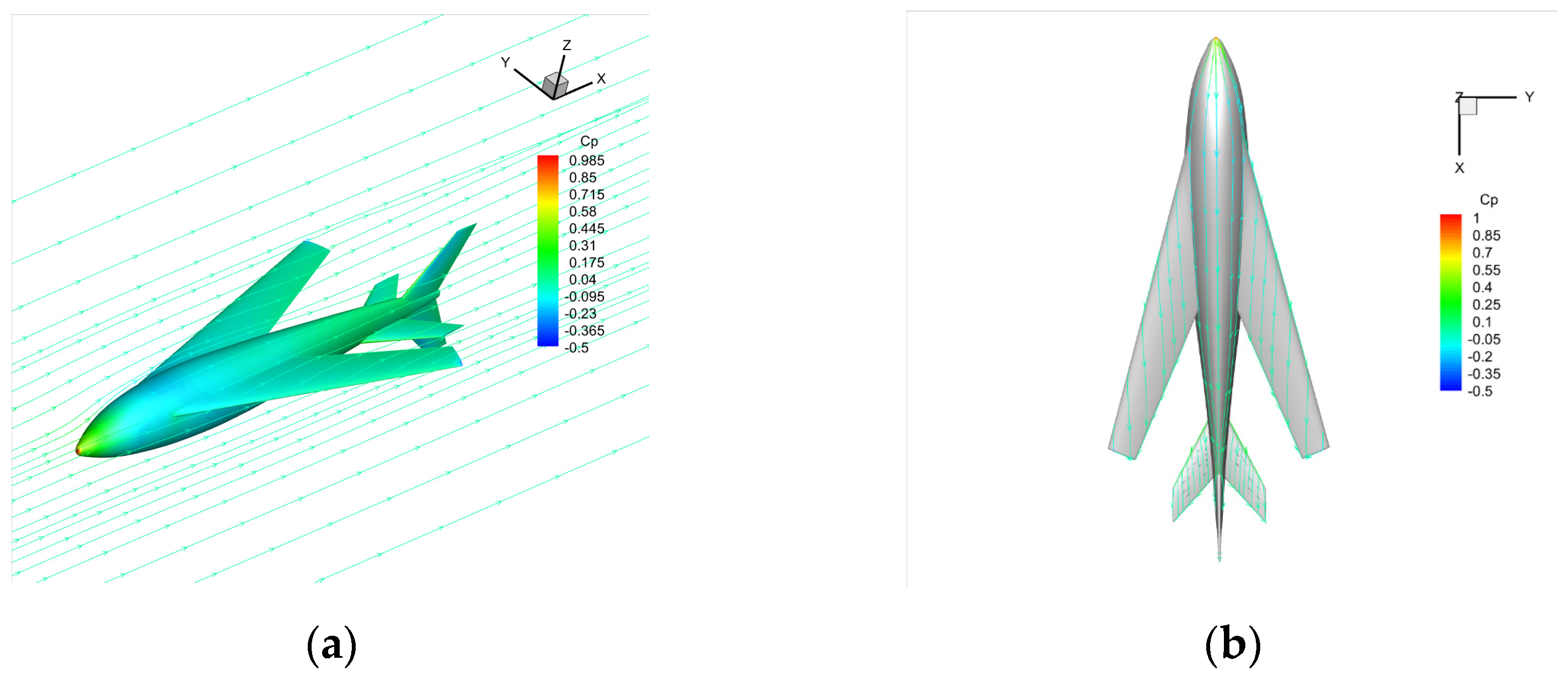
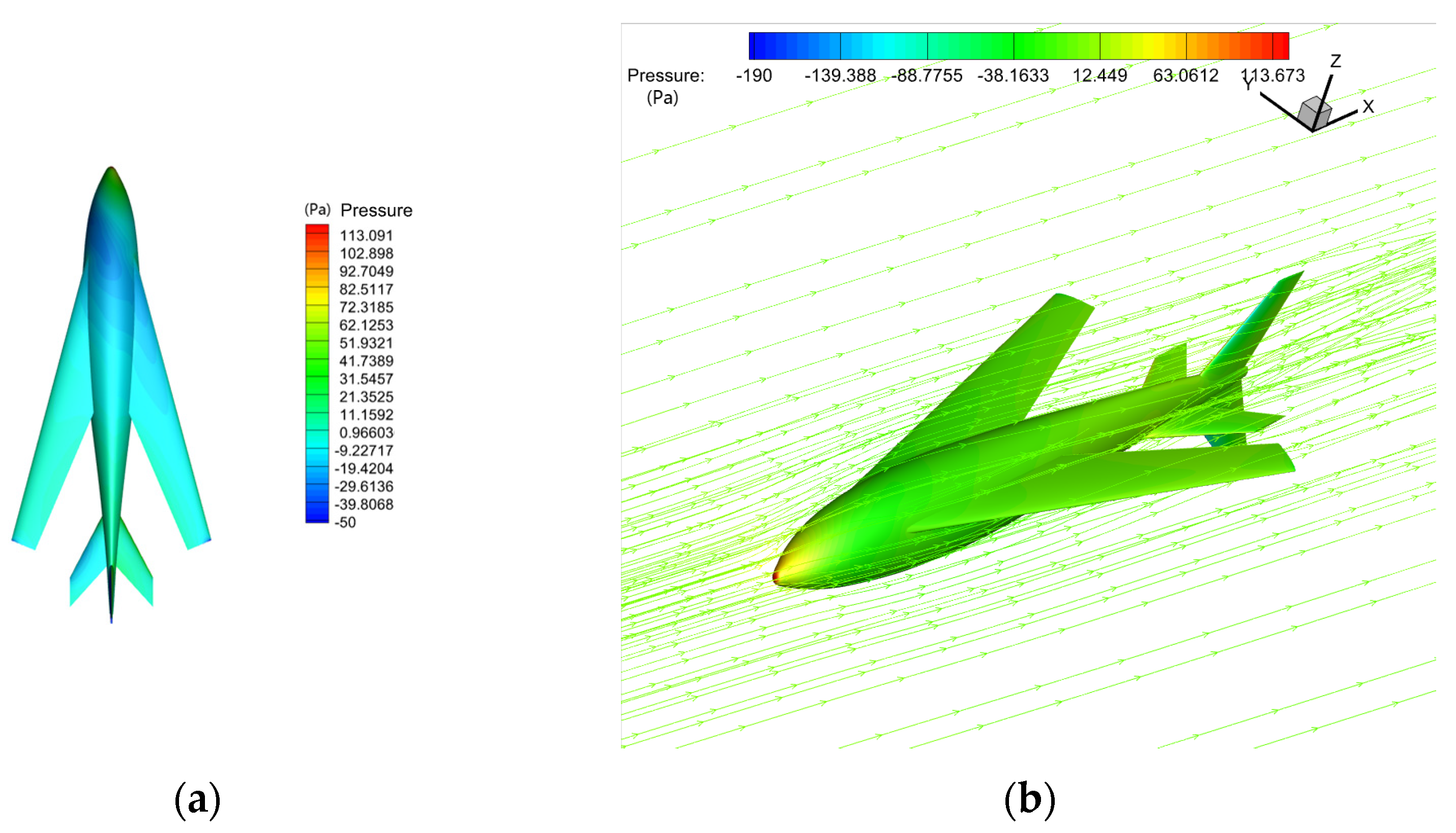
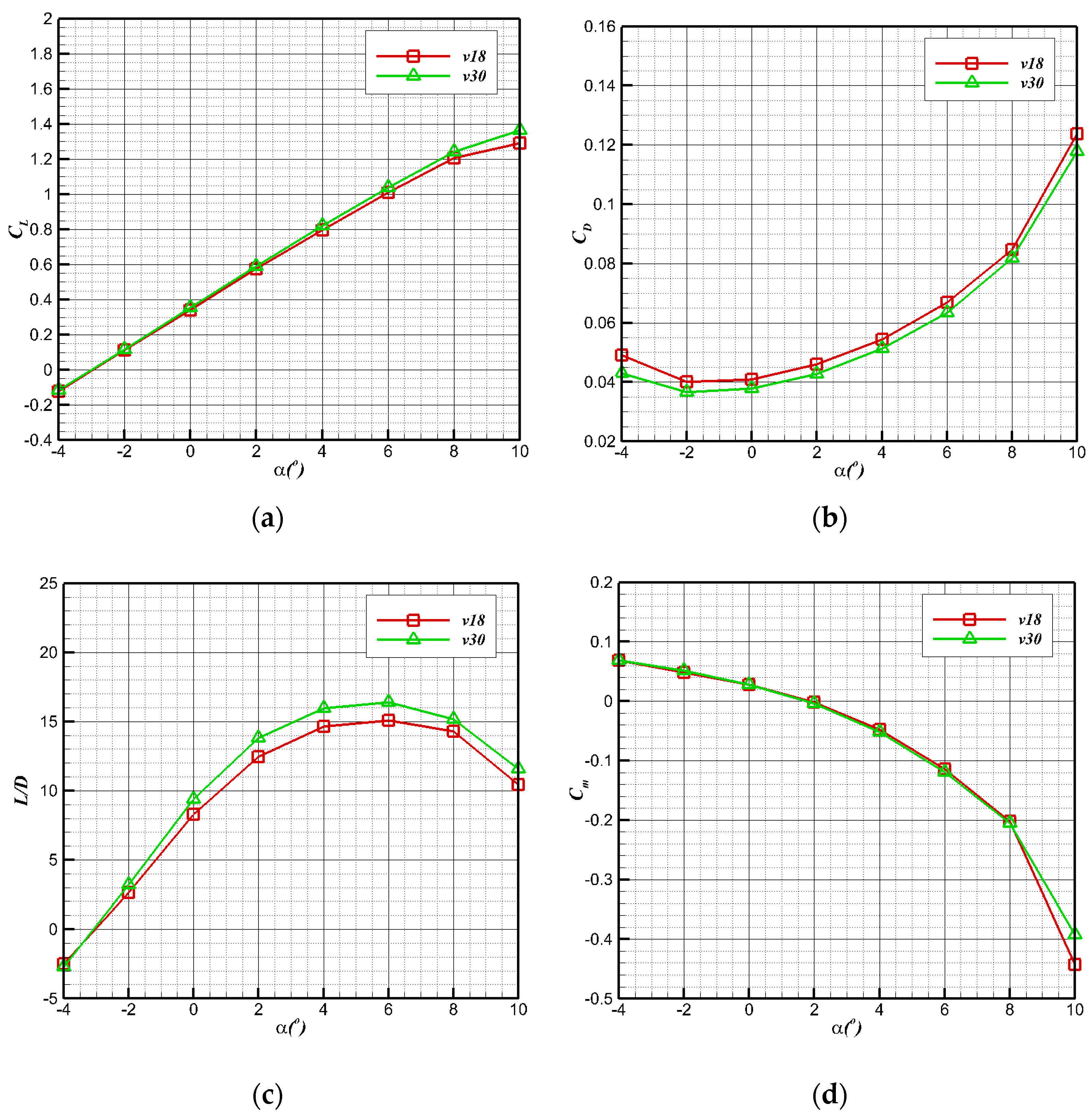
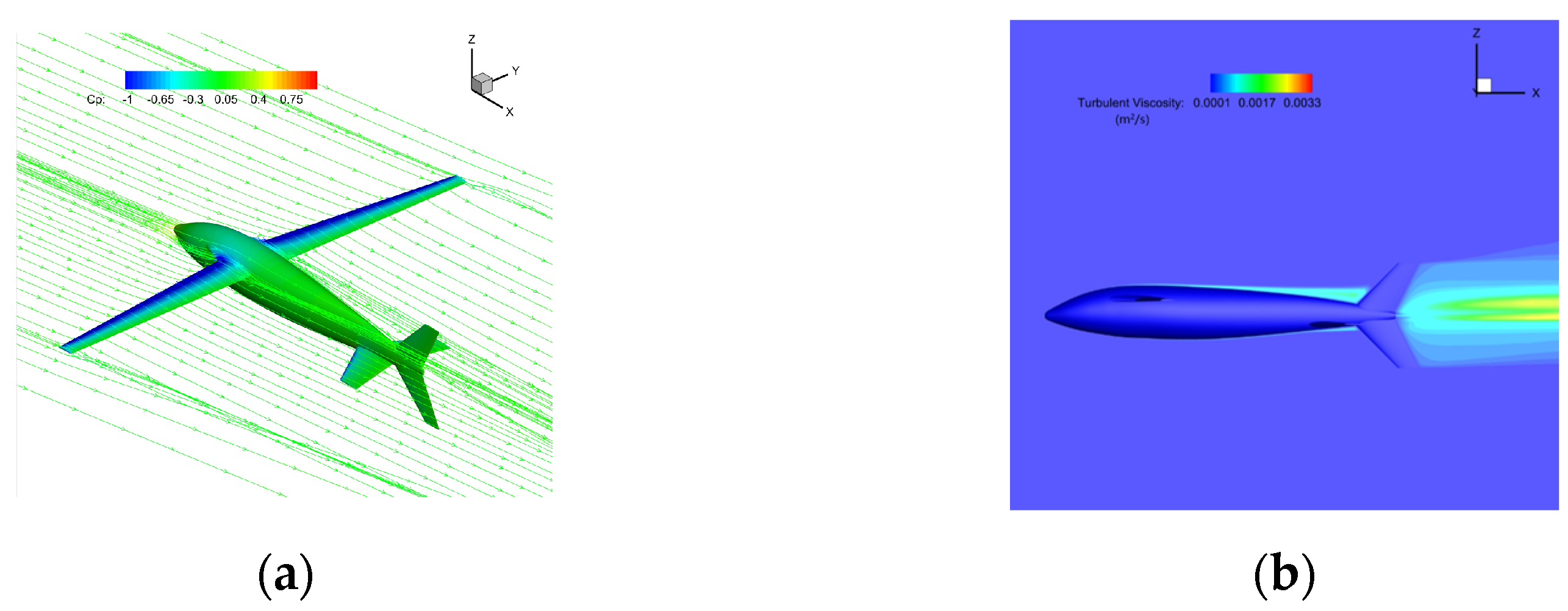
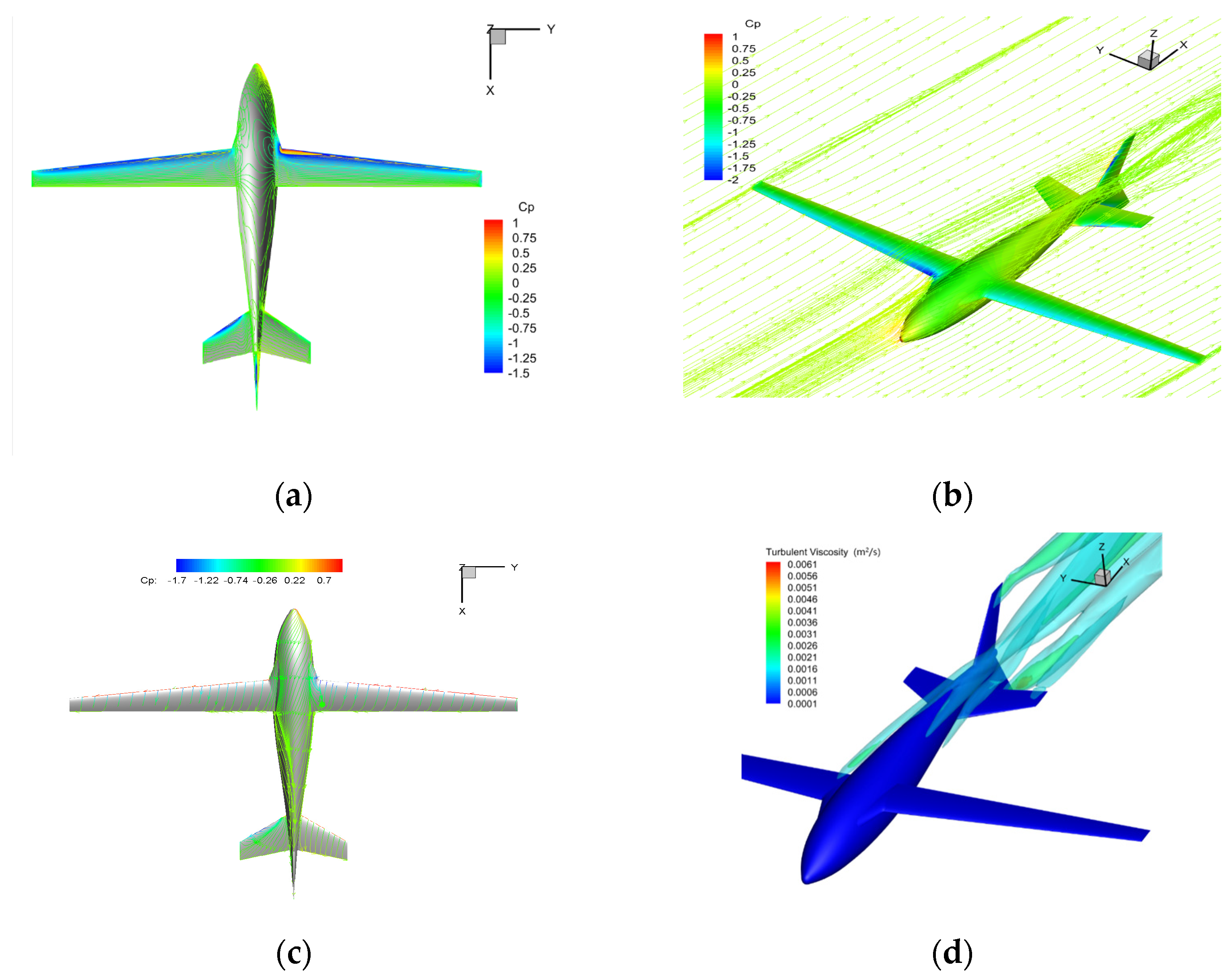
4.3. Longitudinal Aerodynamic Performance of Air-Balanced Flight
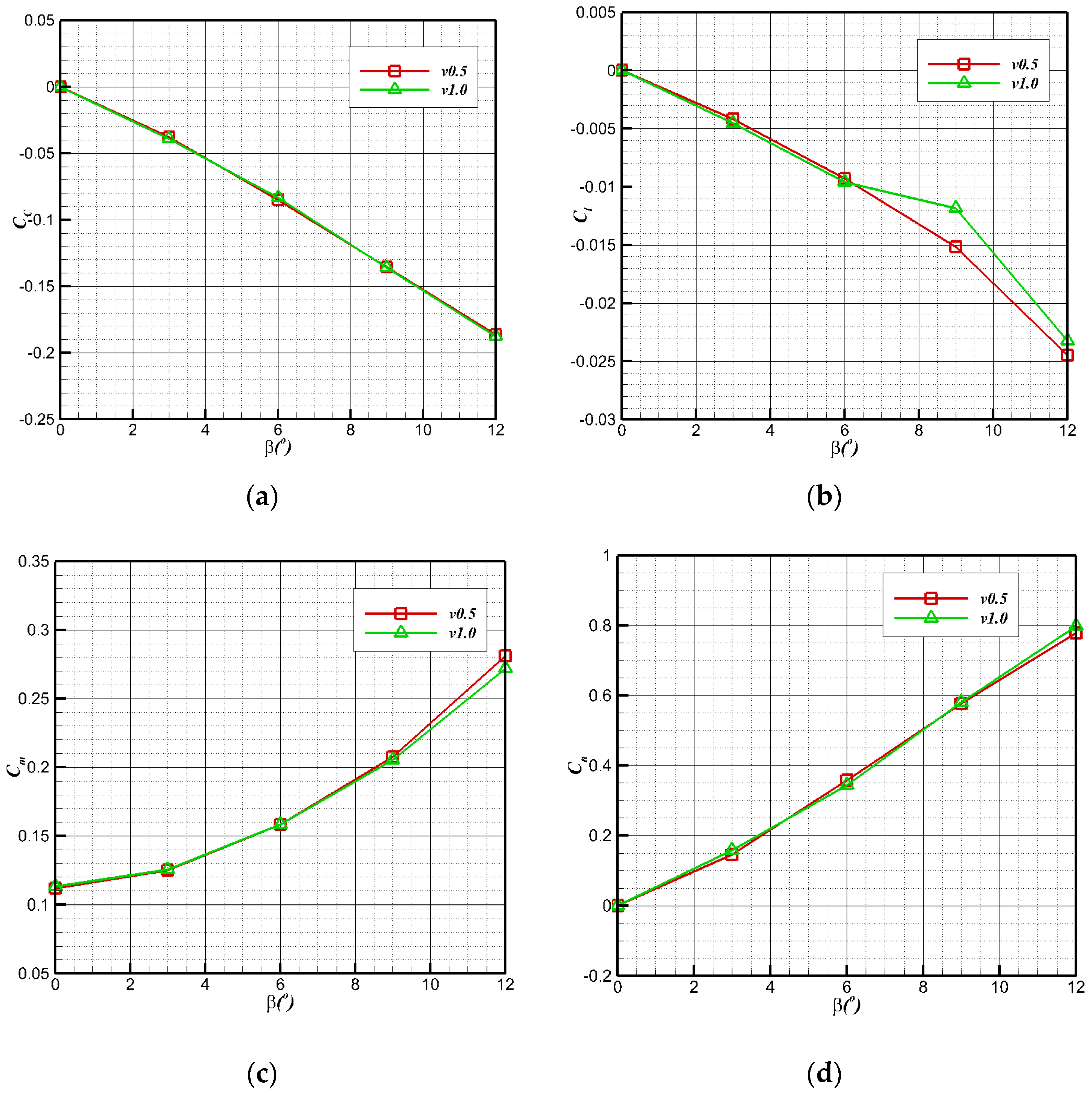
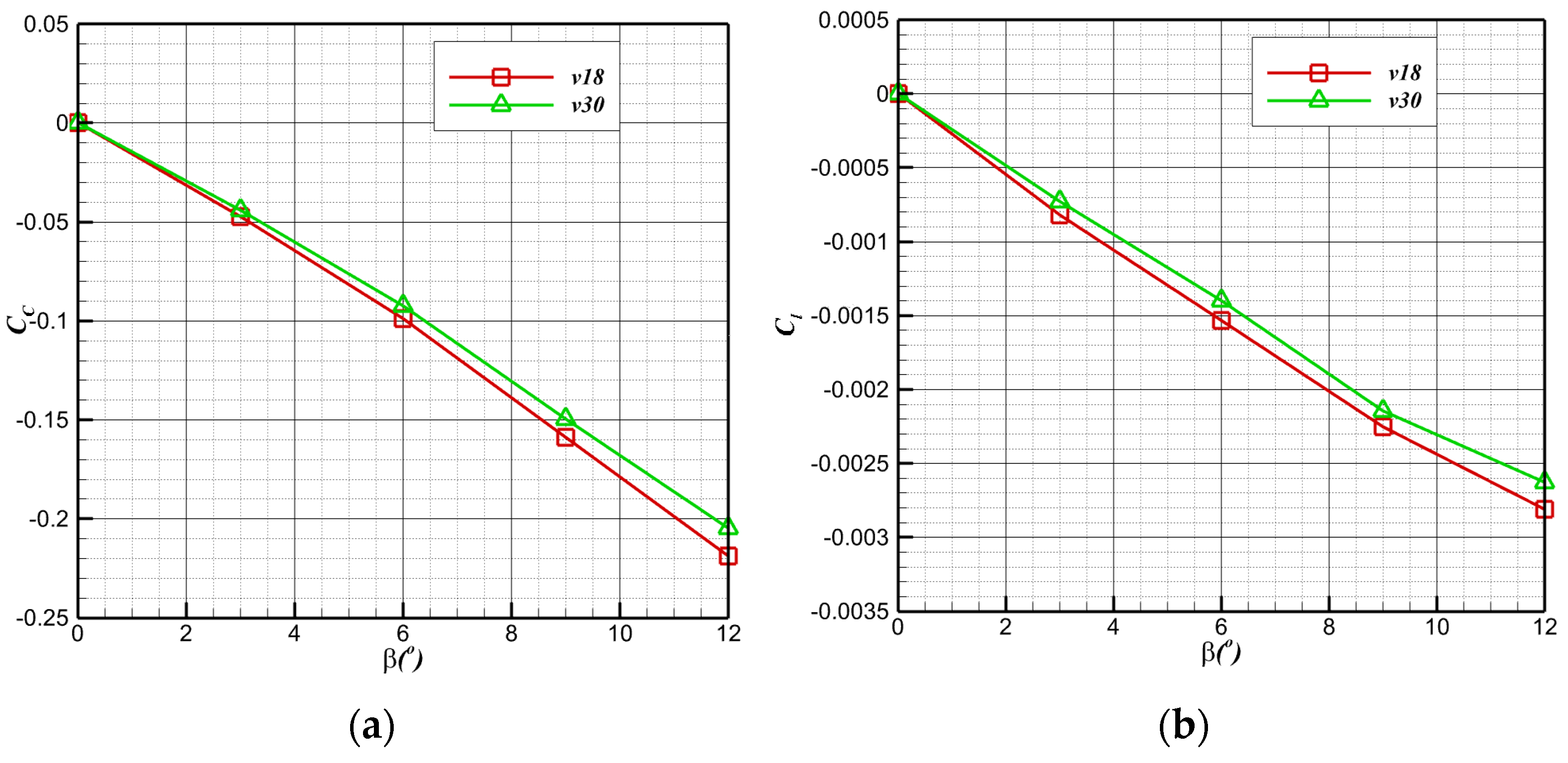
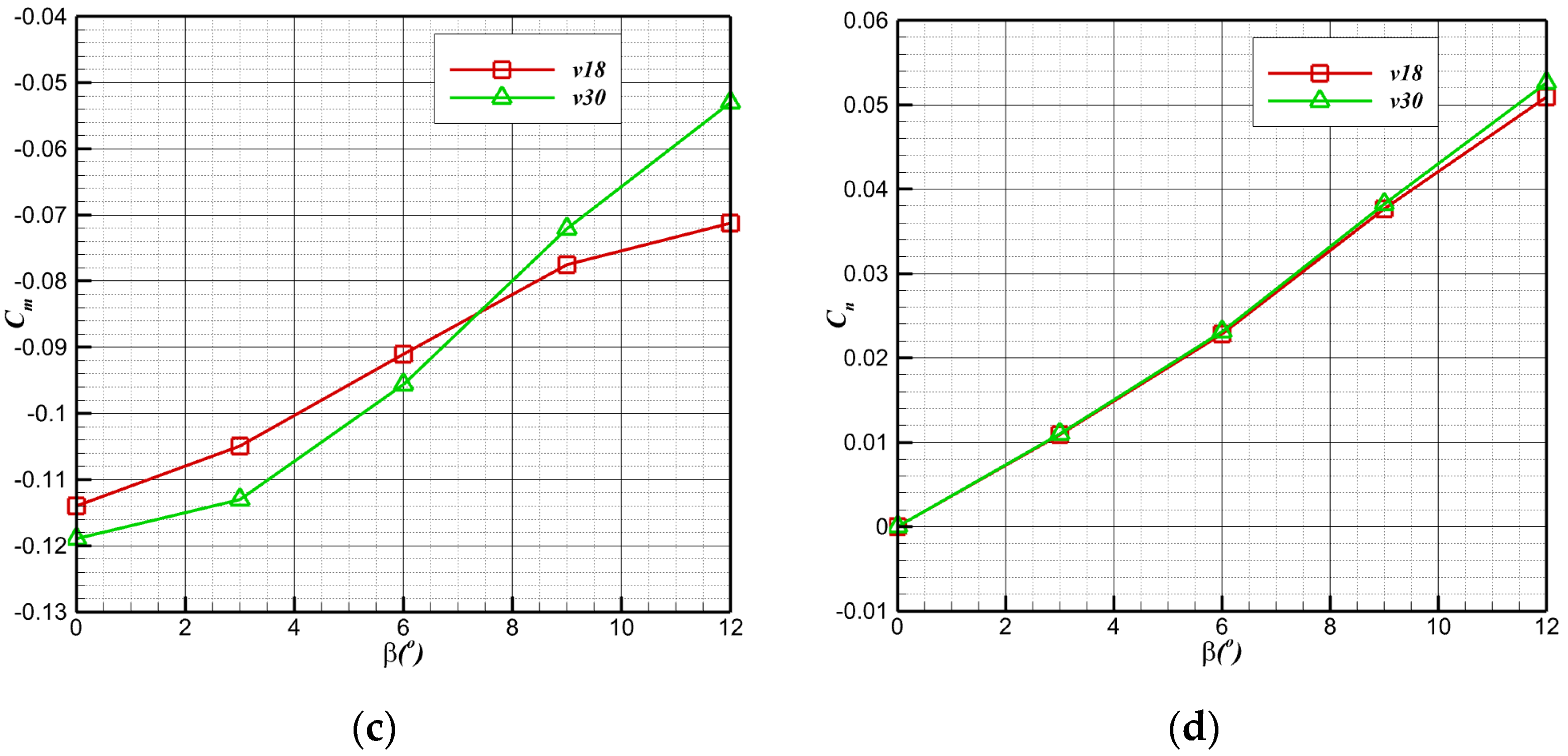
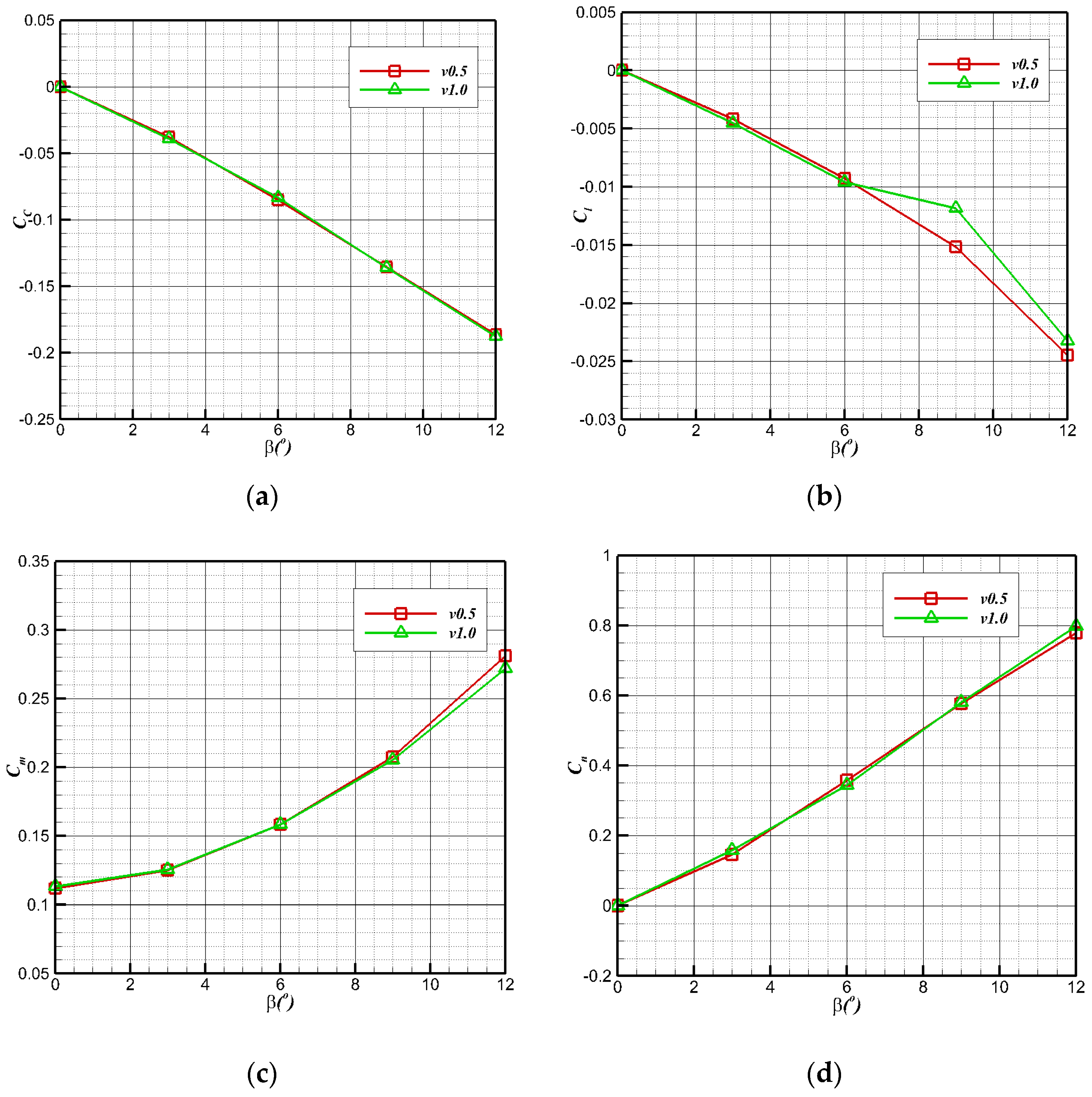
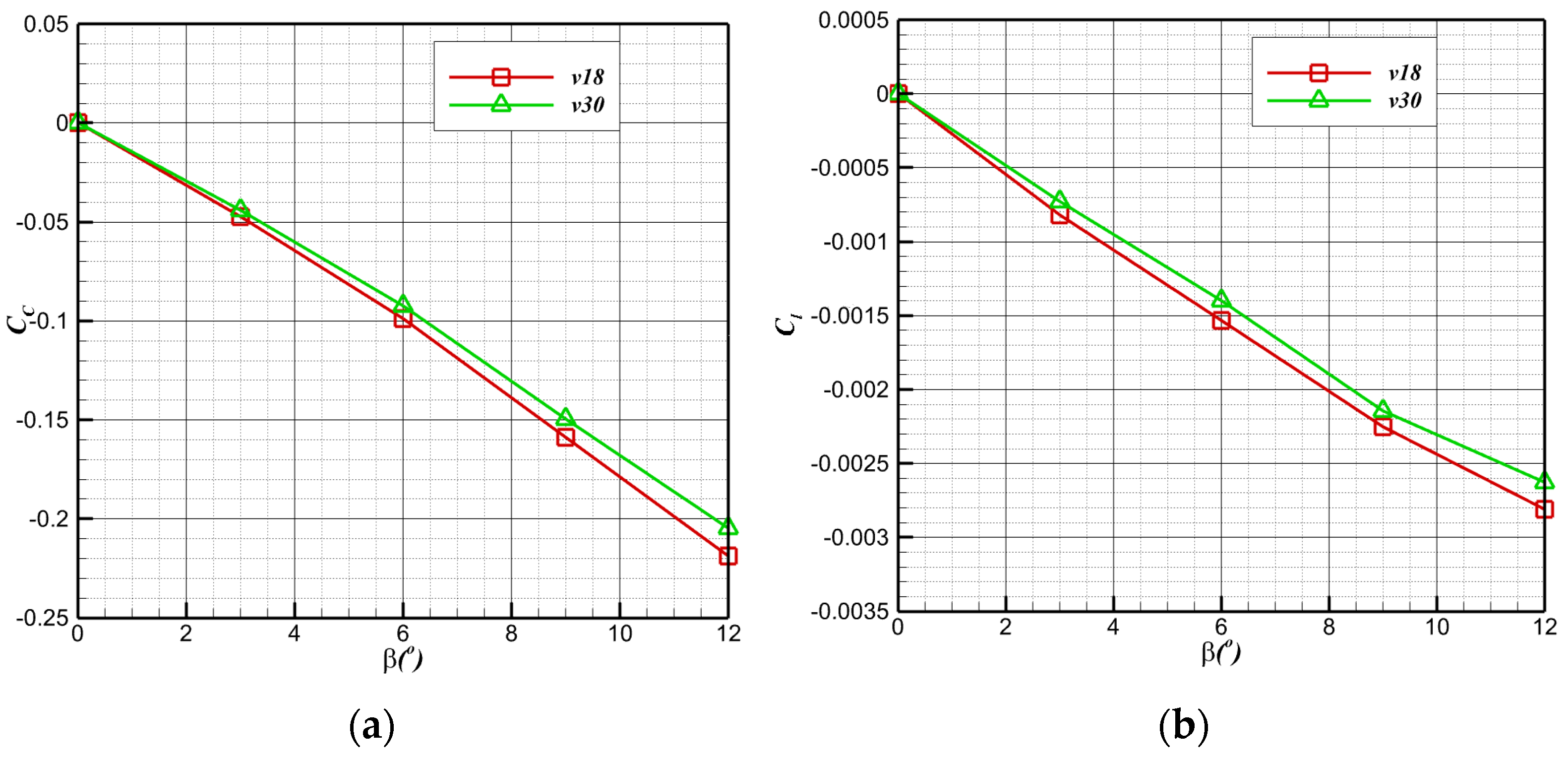
4.4. Transverse Aerodynamic Performance in Air Flight
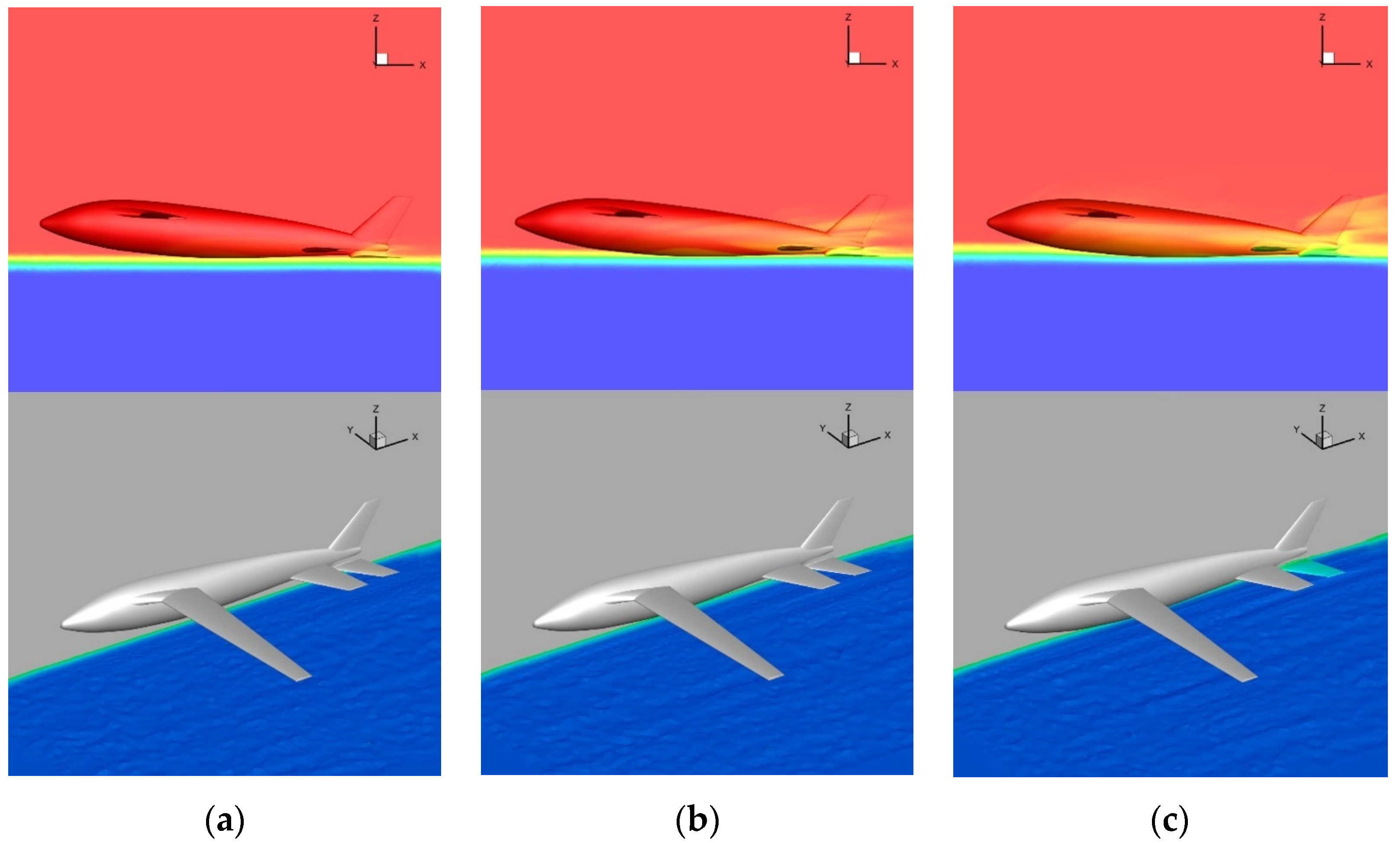
5. Performance of The Water Cross-Over Process and Acceleration Process on the Water
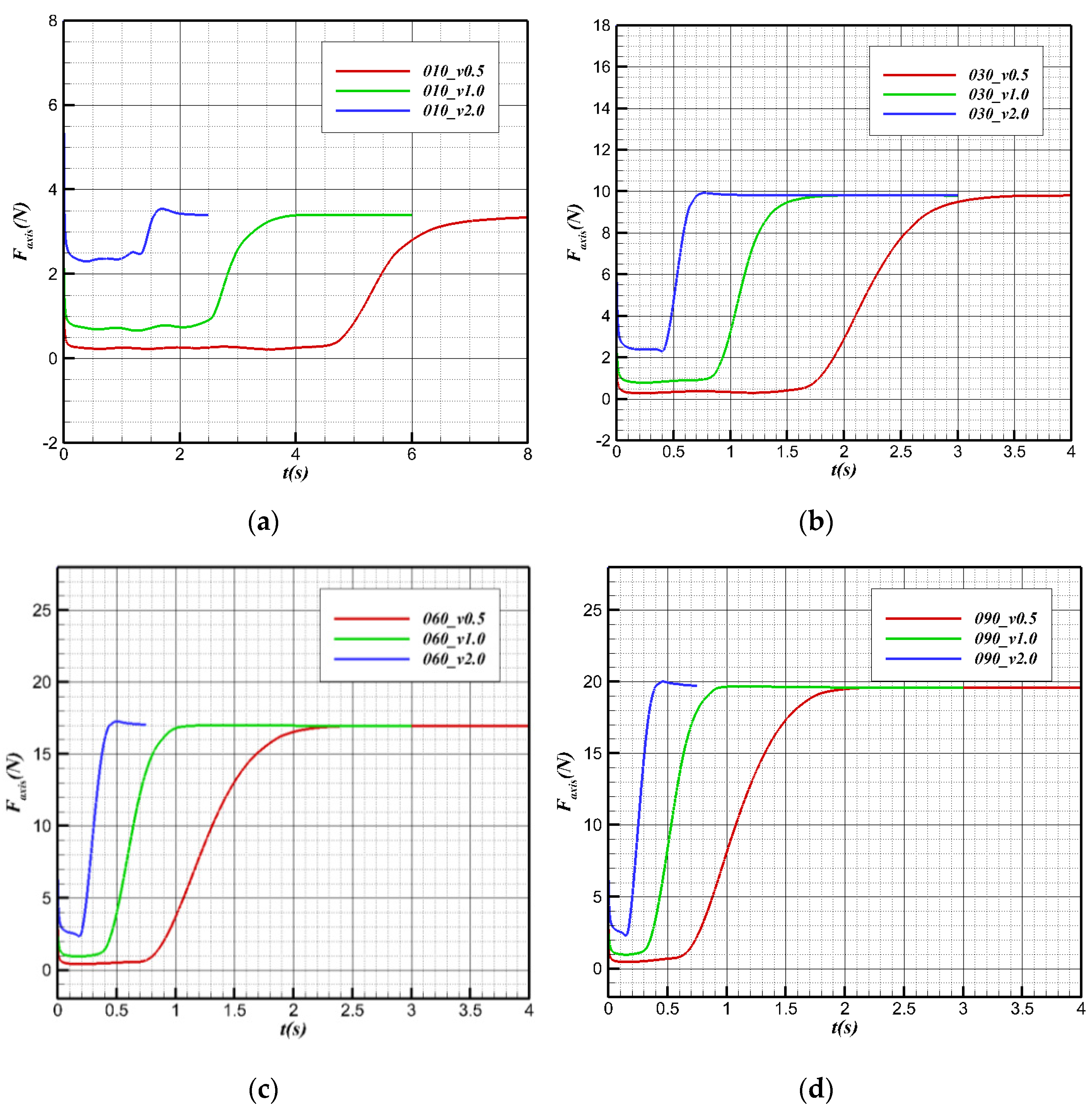
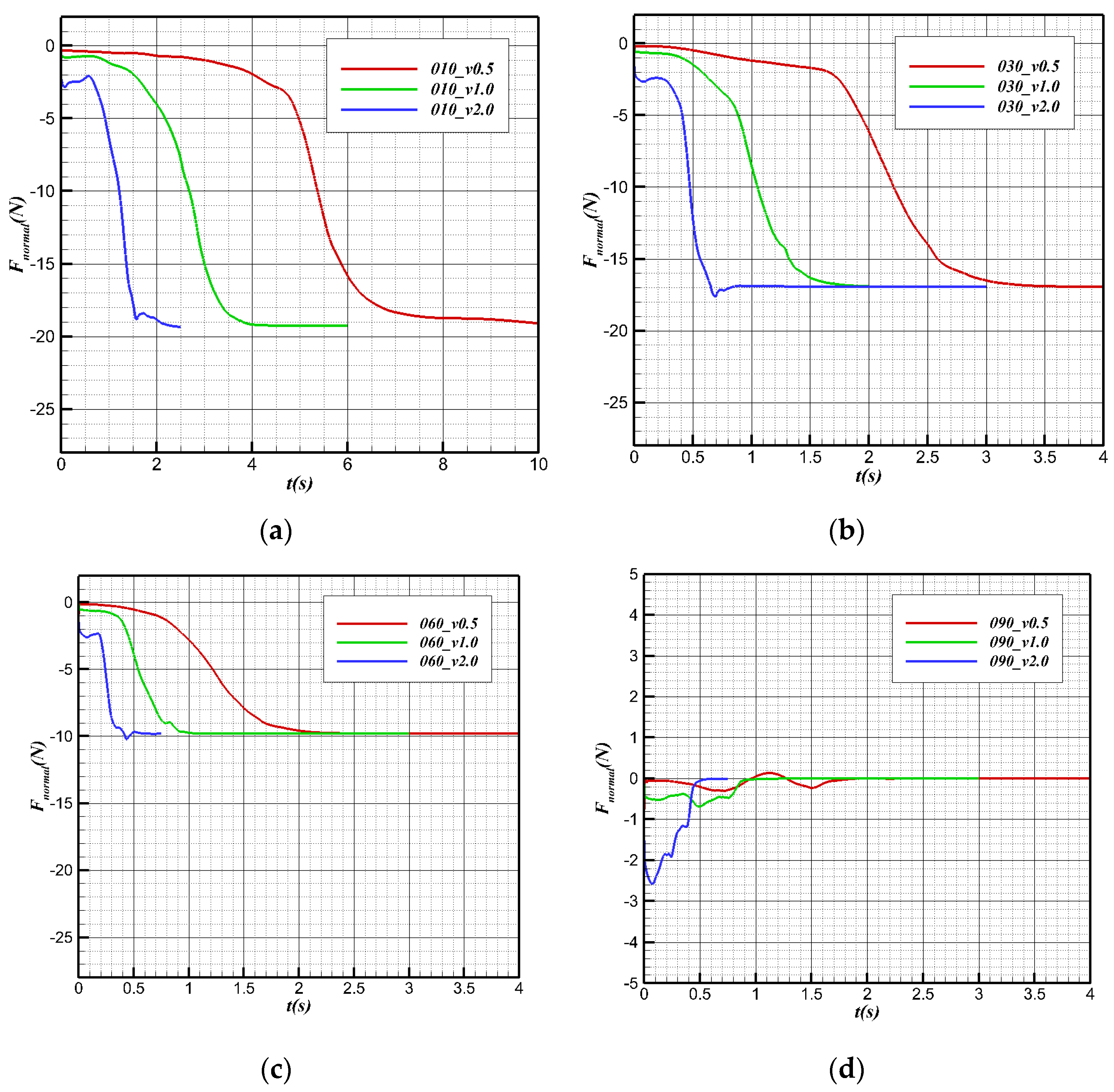
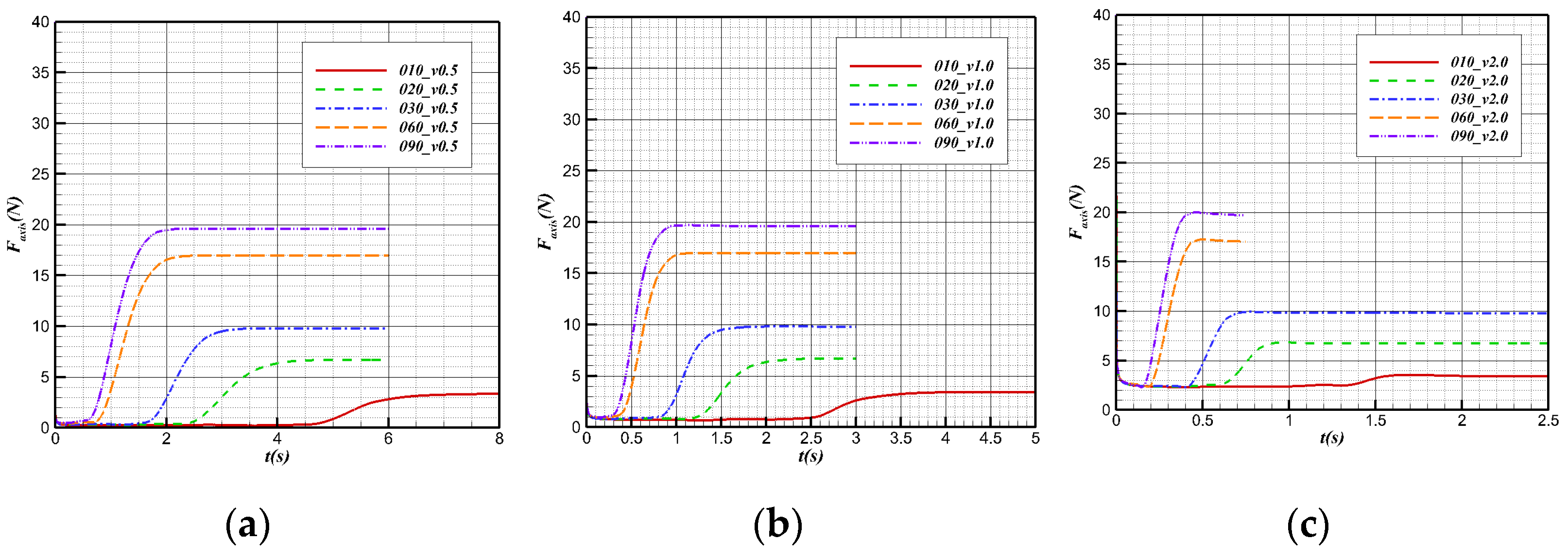
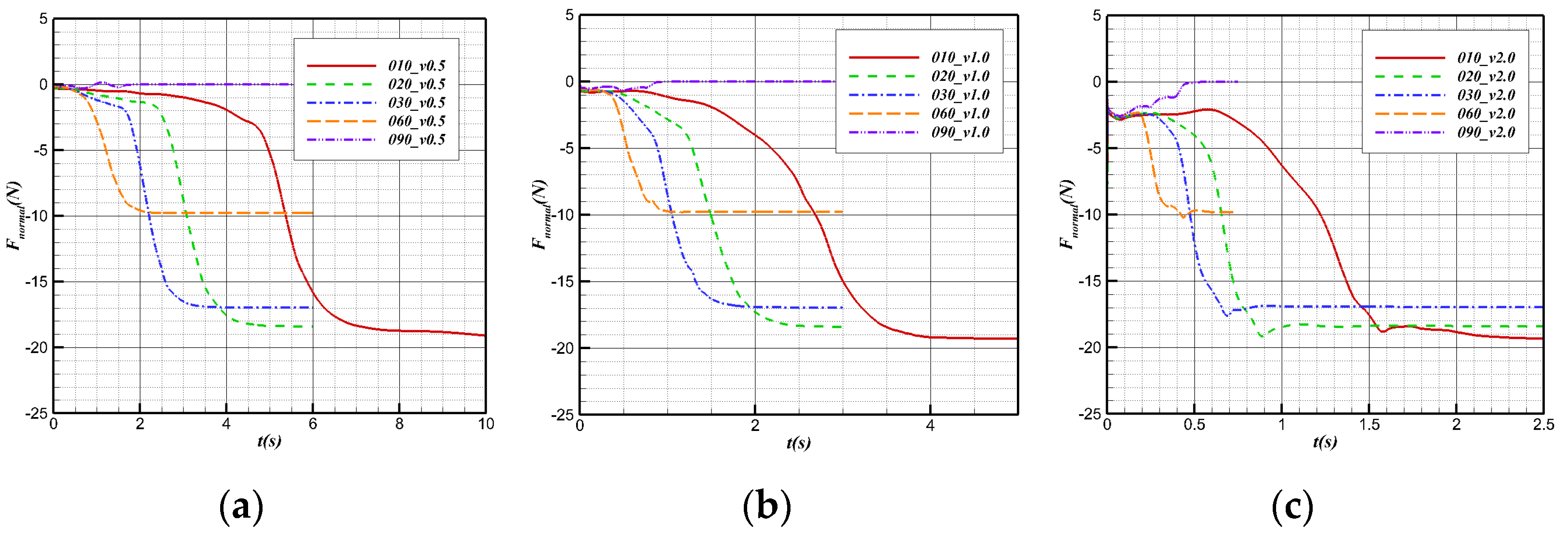
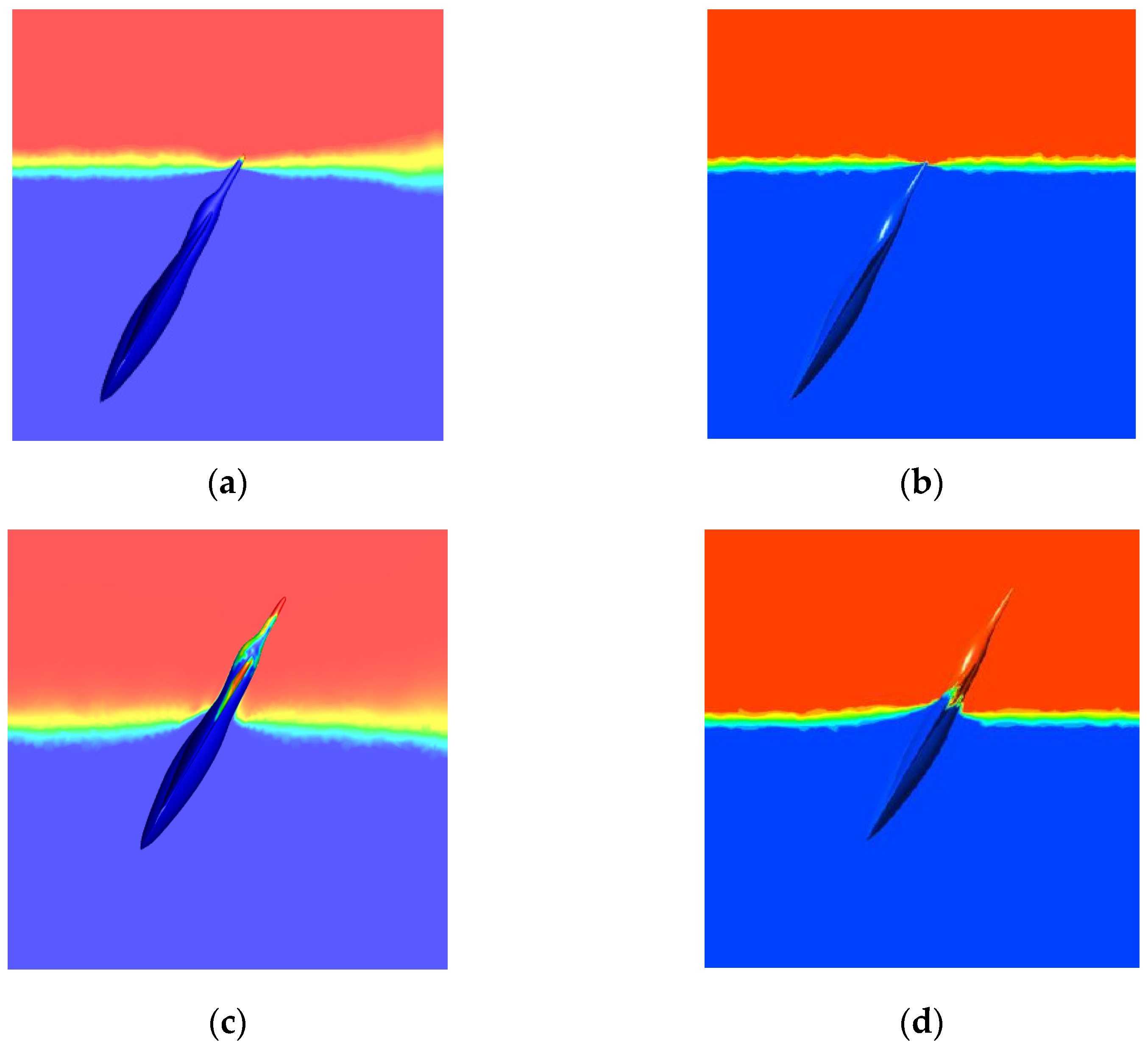
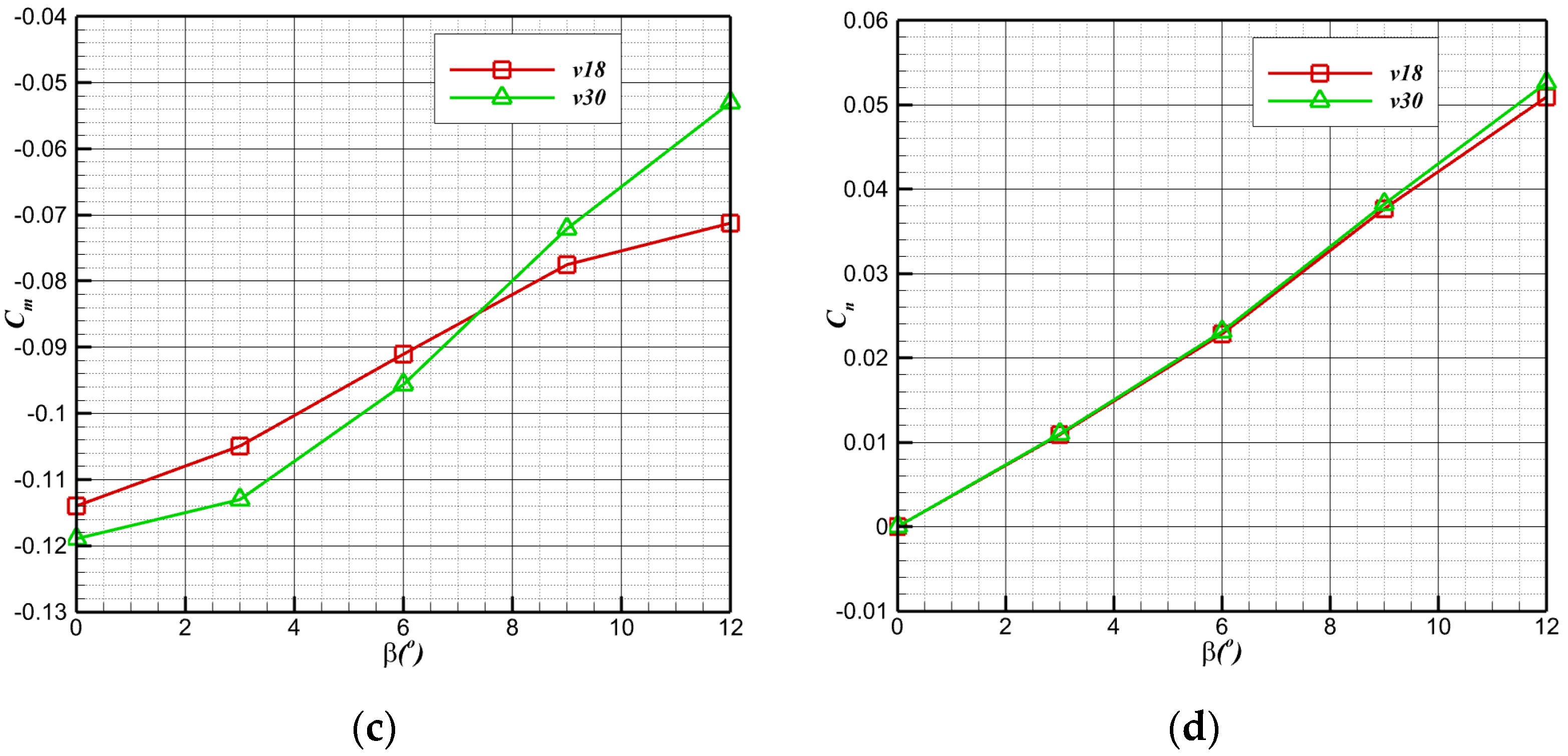
5.1. Load Characteristics of Water Cross-Over Process
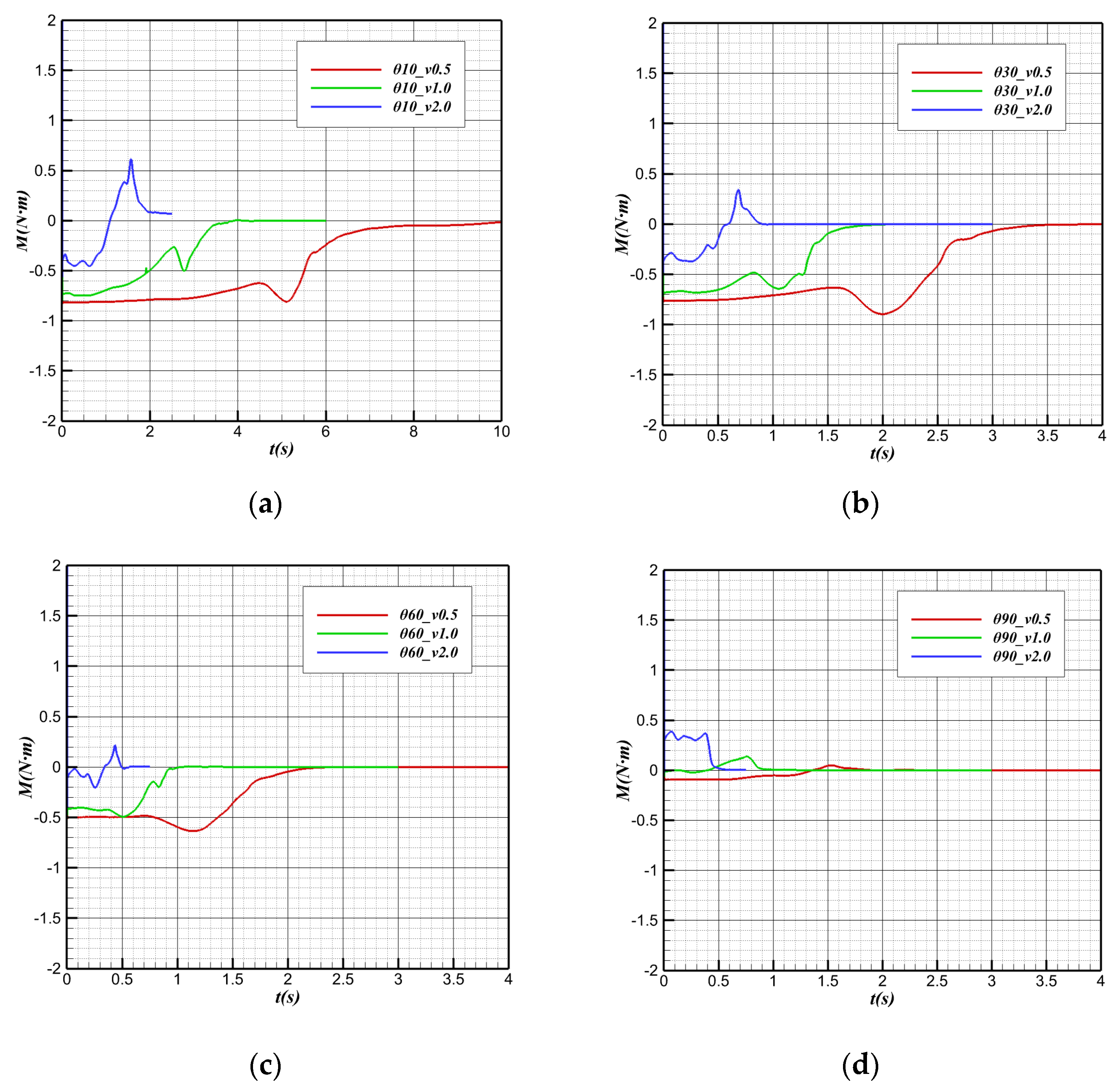
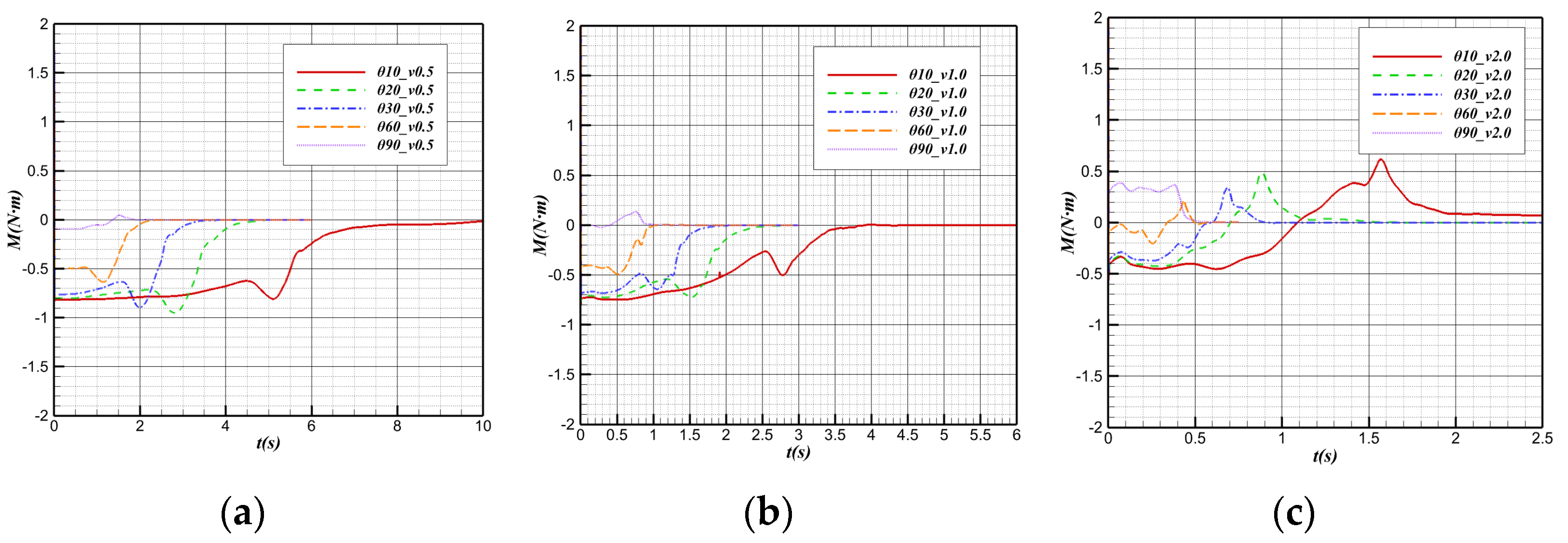
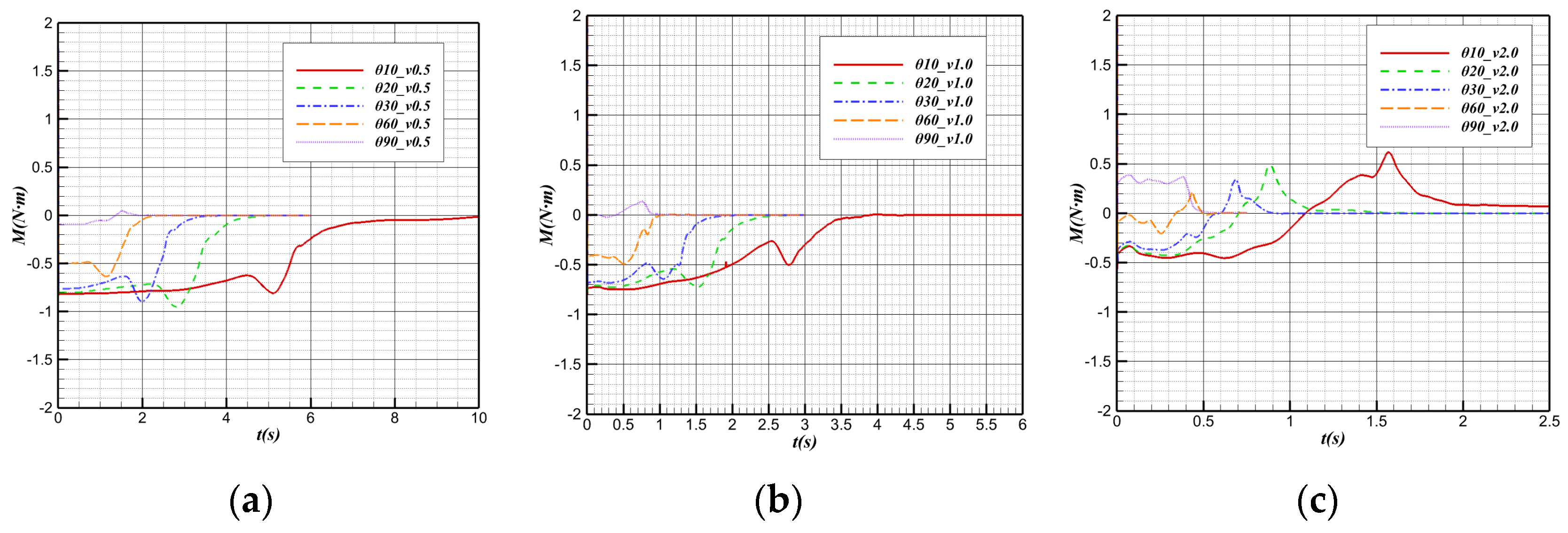
5.2. Pitching Characteristics of the Water Cross-Over Process
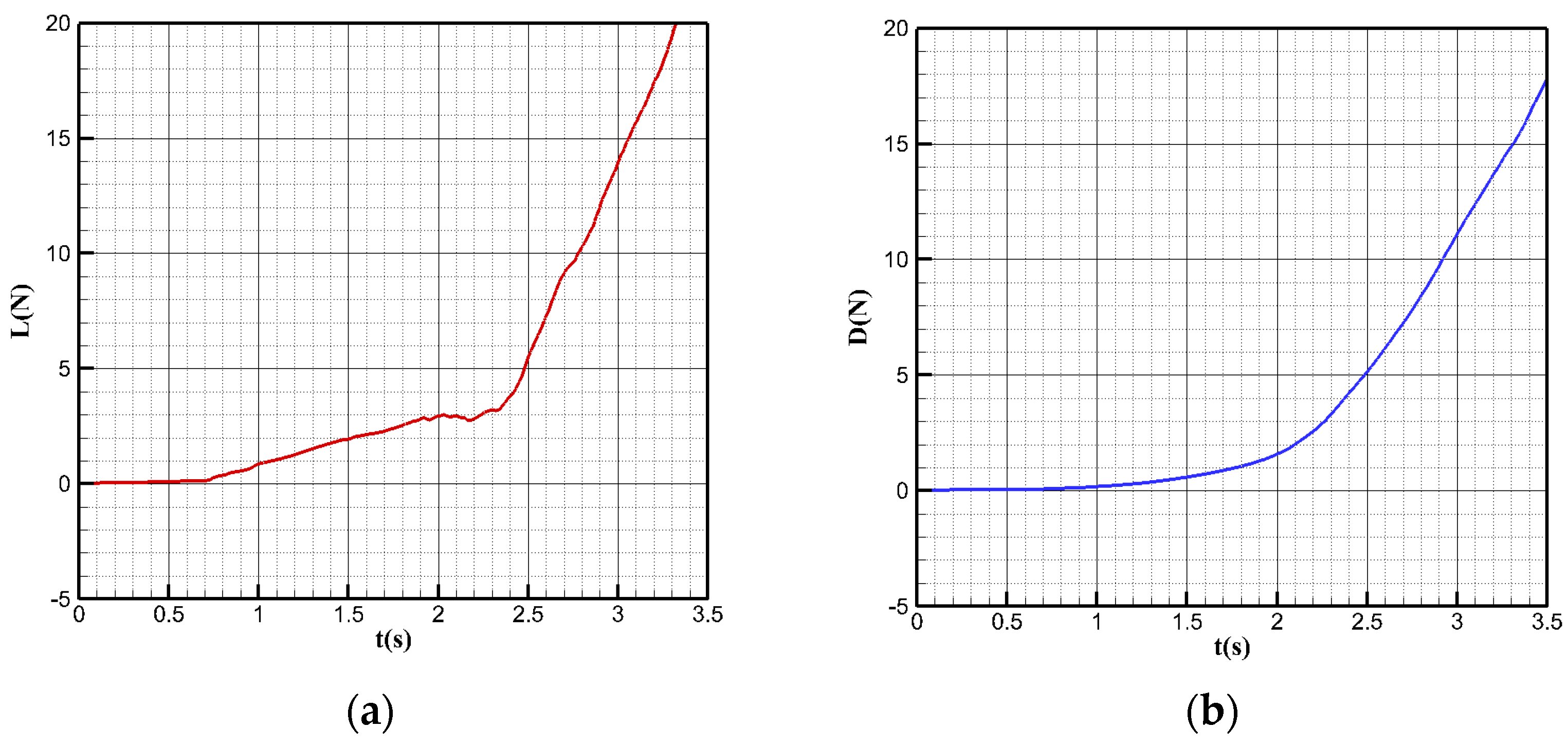
5.3. Acceleration Process on the Water
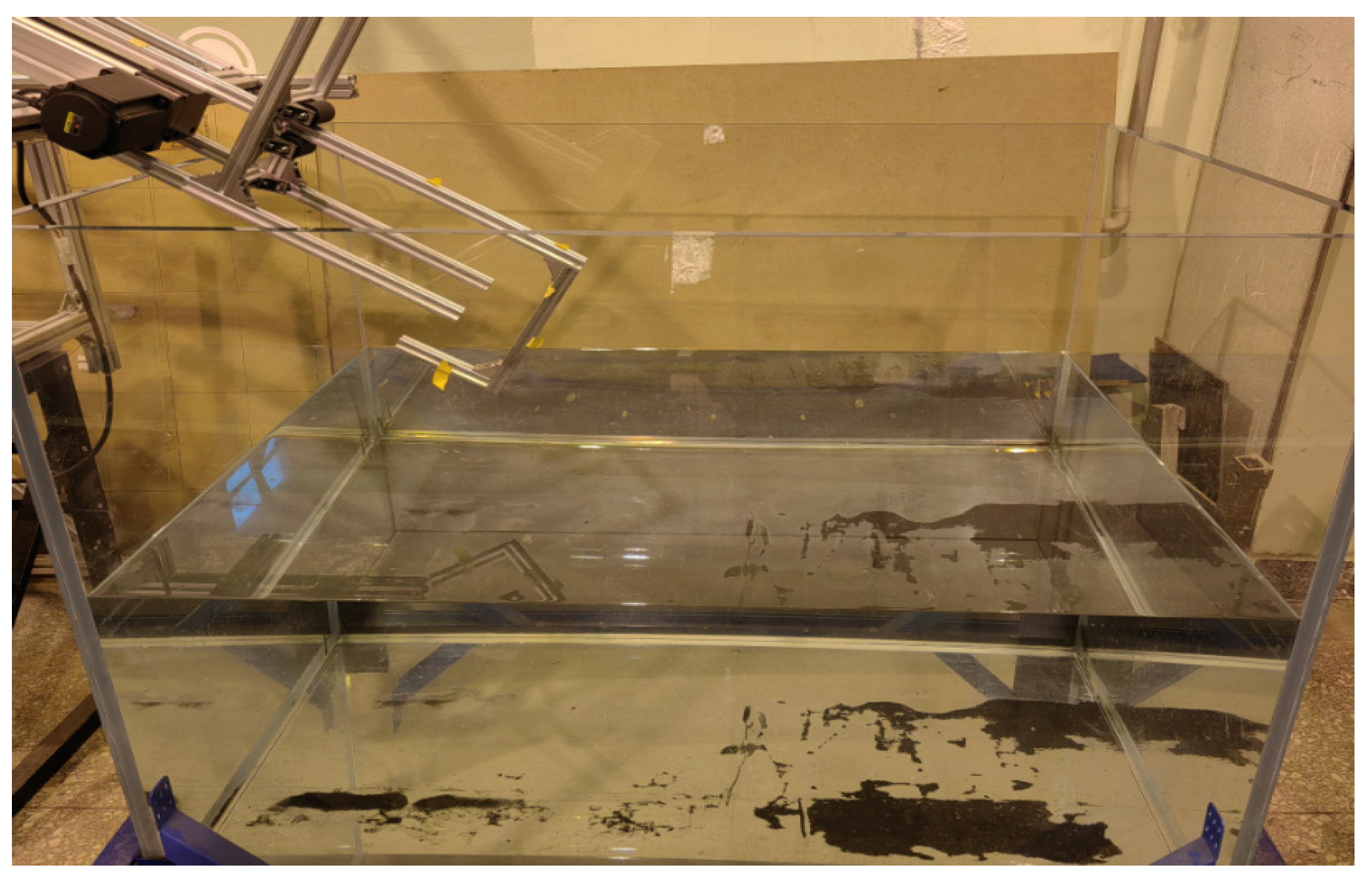
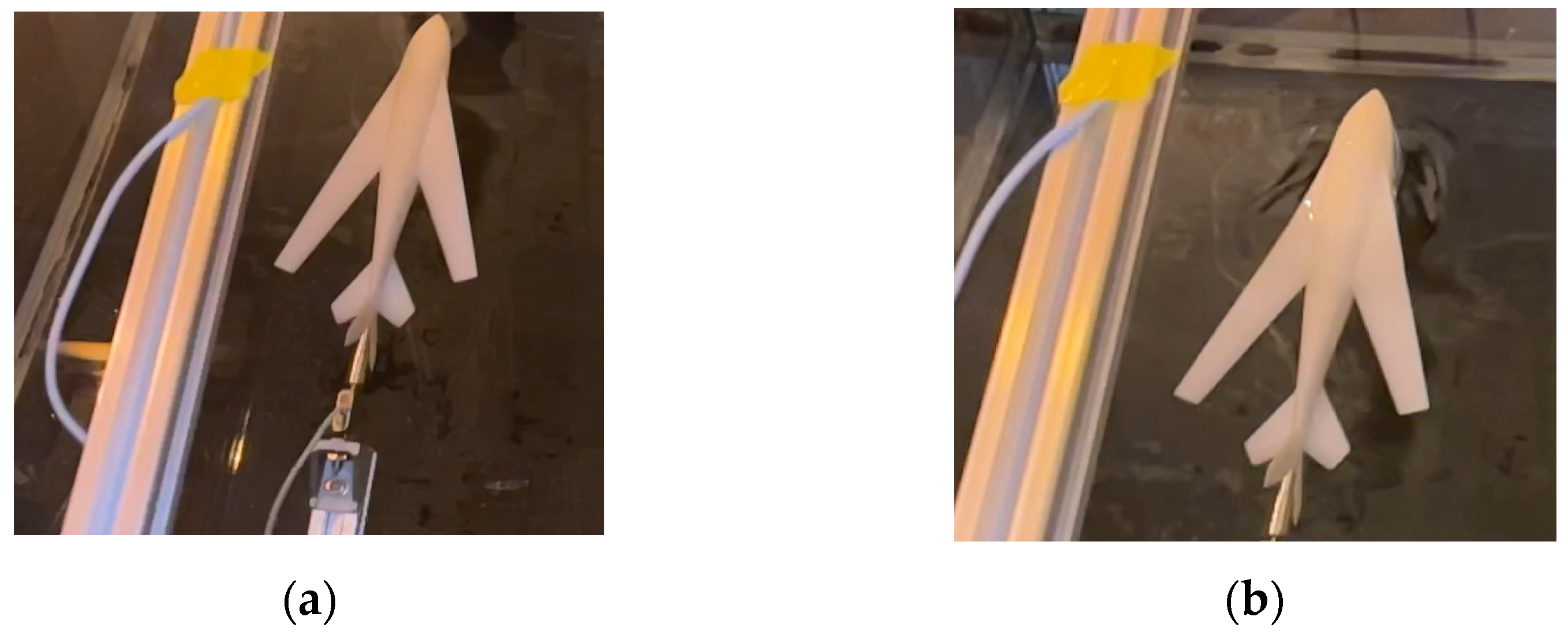
6. Water Cross-Over Test Verification
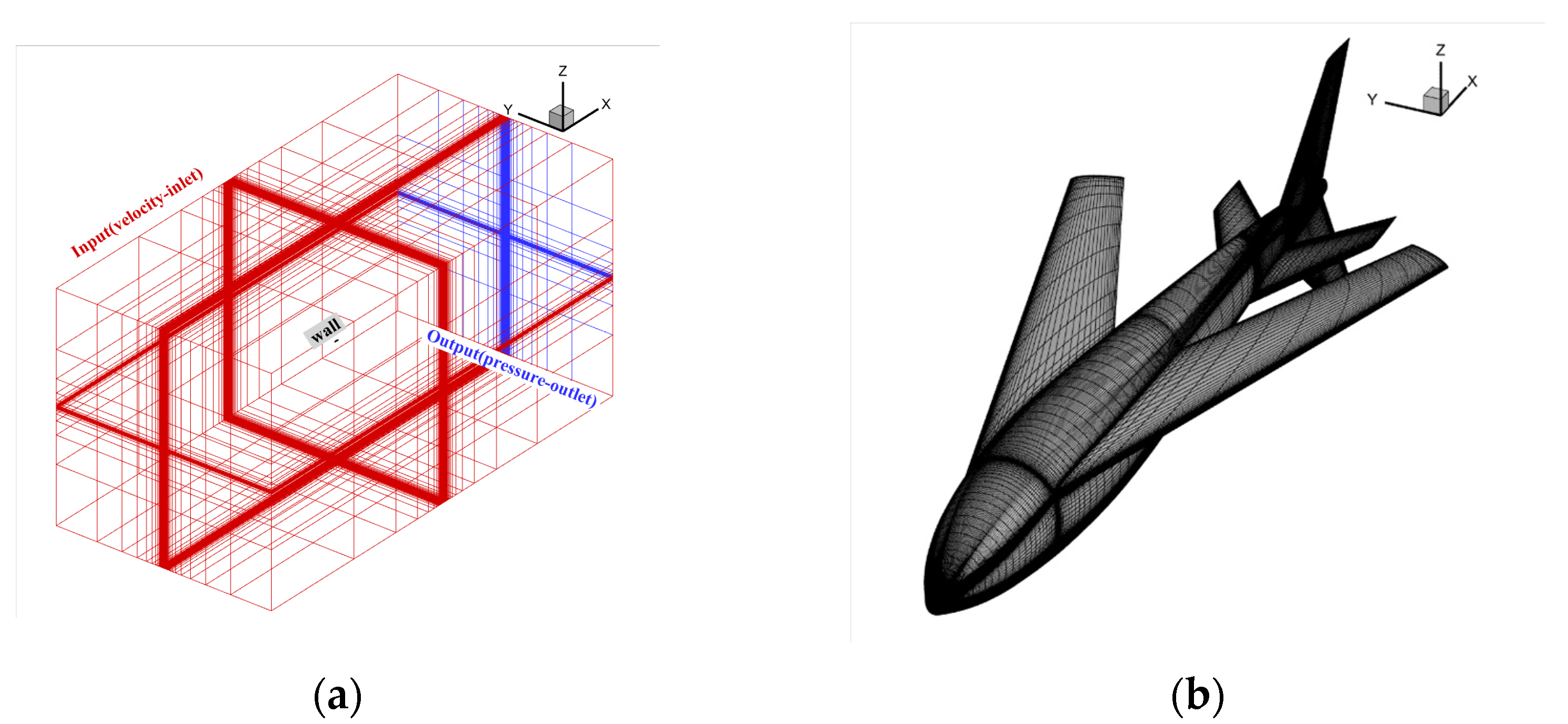
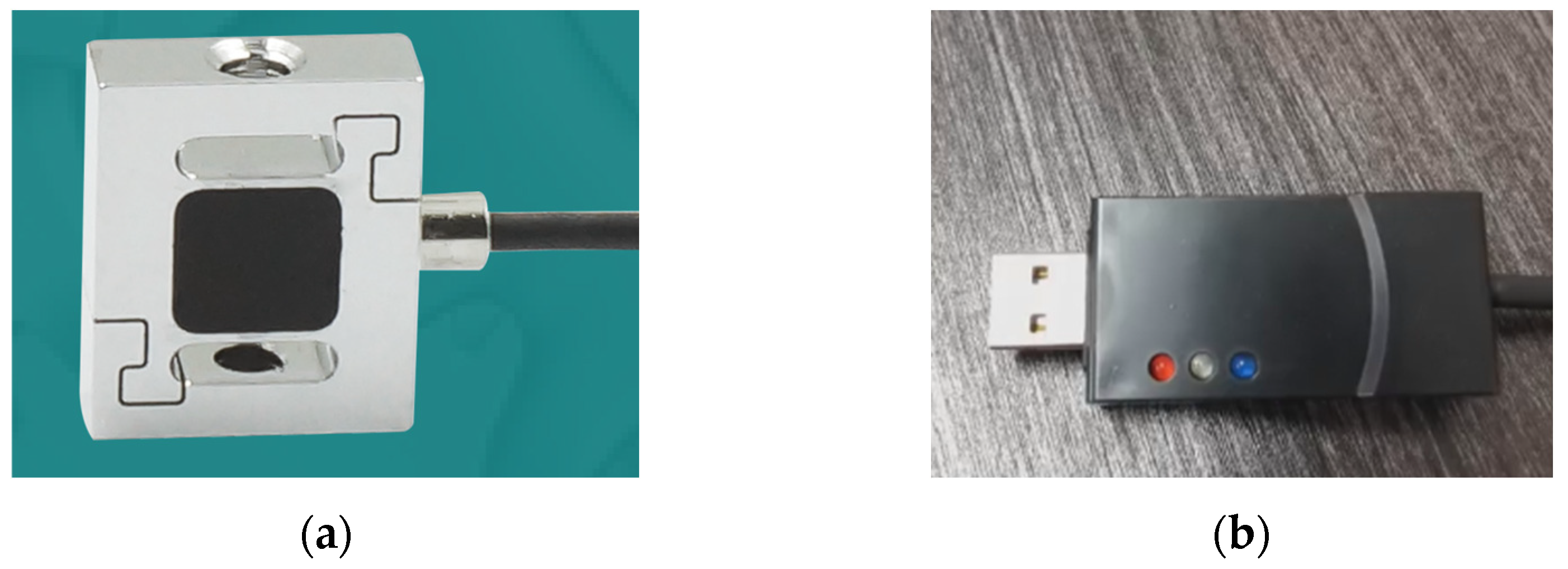
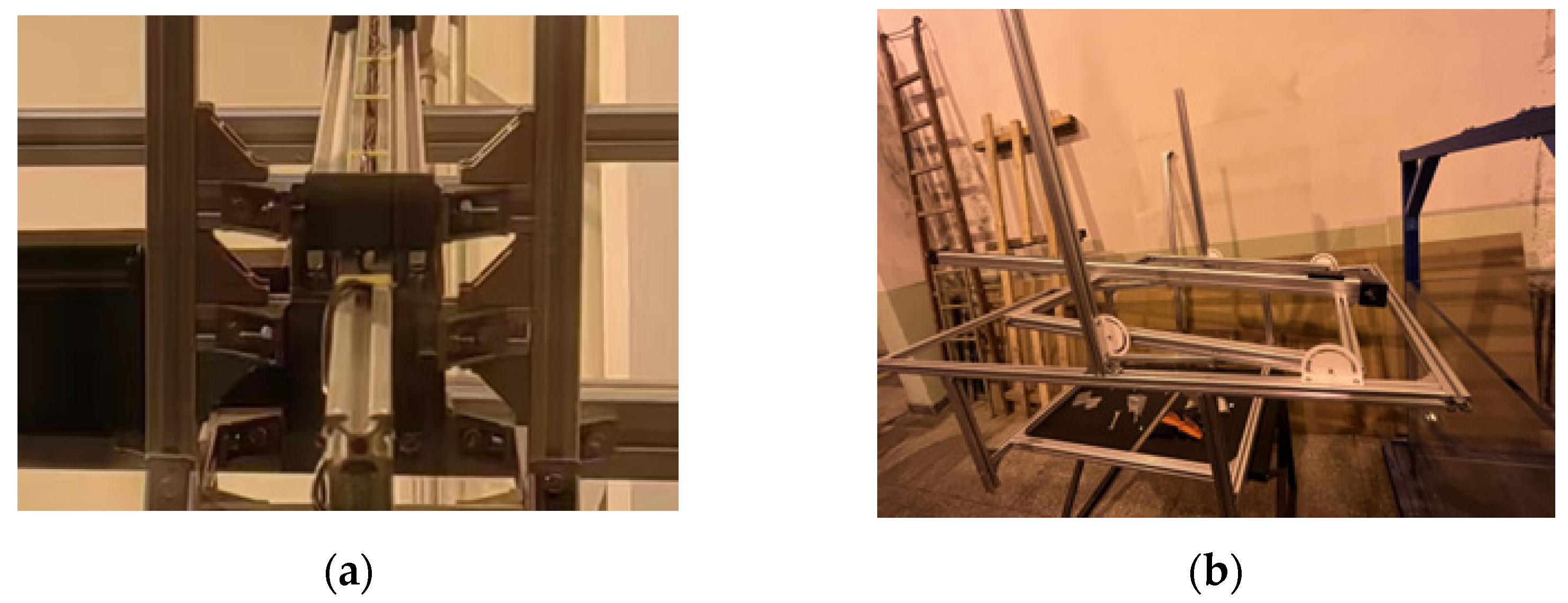
6.1. Experimental Device
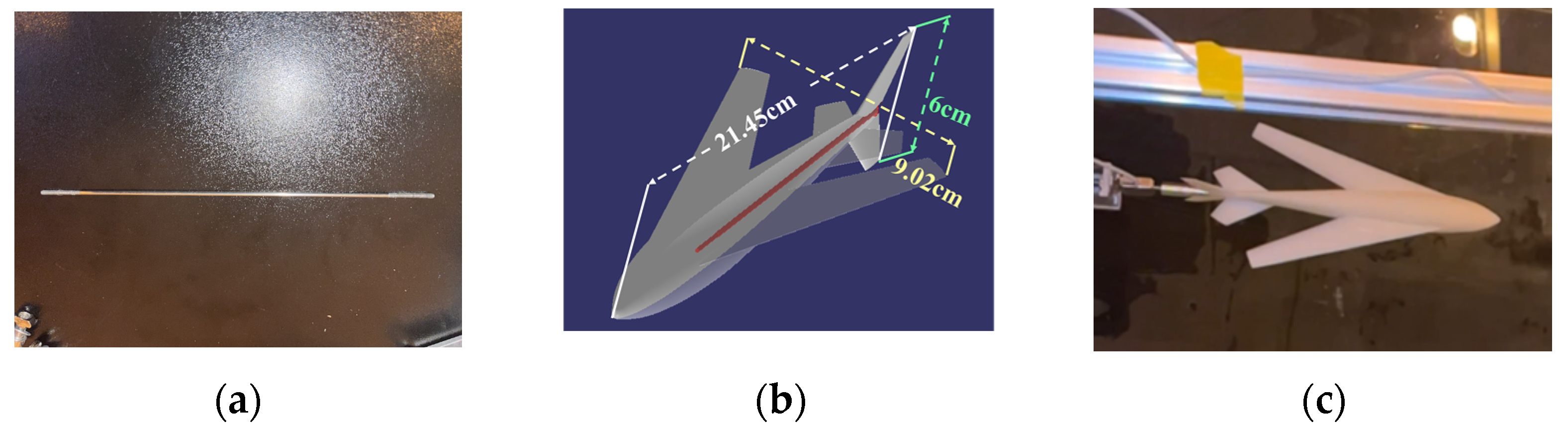
6.2. Design of Scale Model and Connection Mechanism
6.3. Experimental Results and Analysis
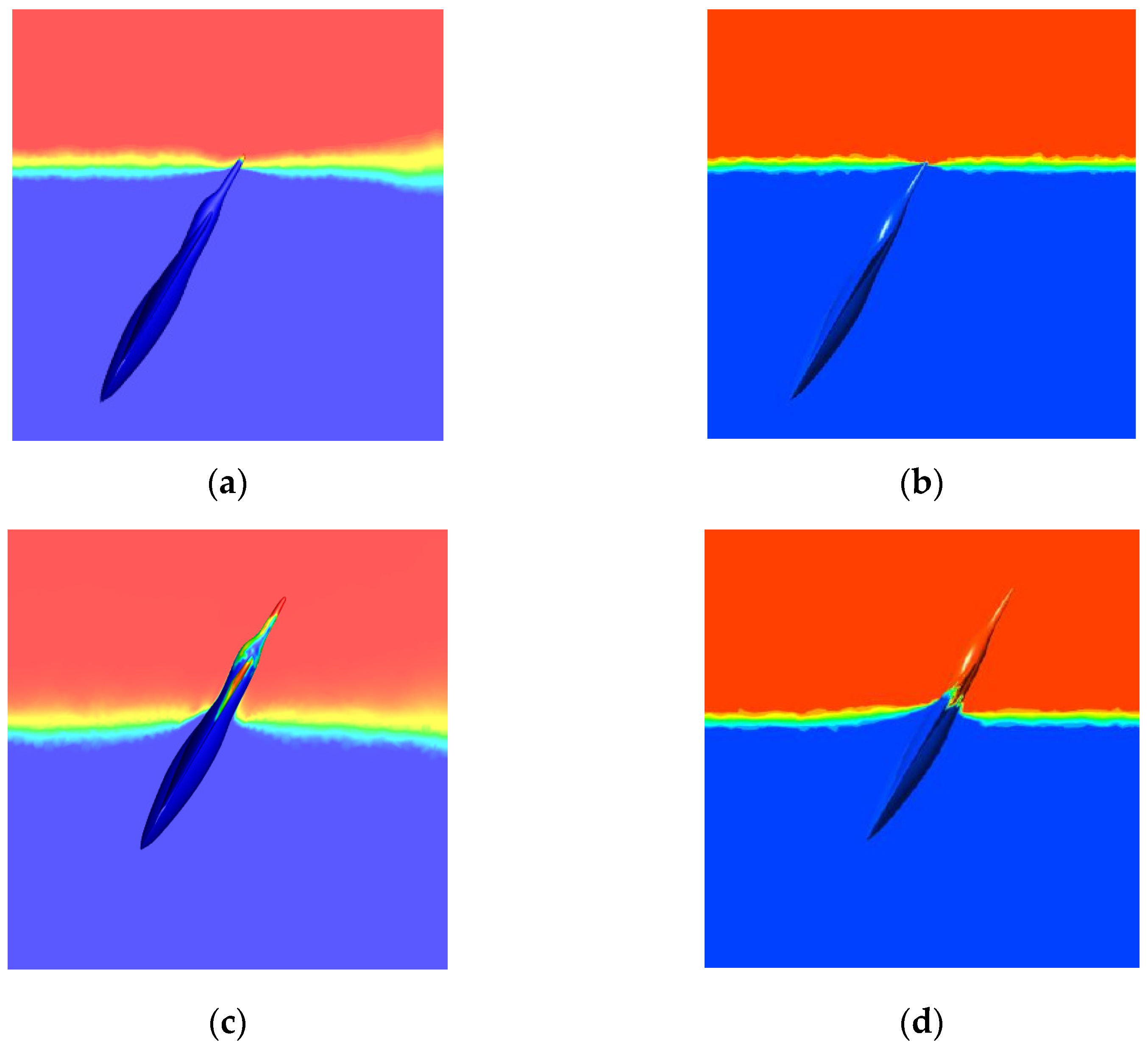
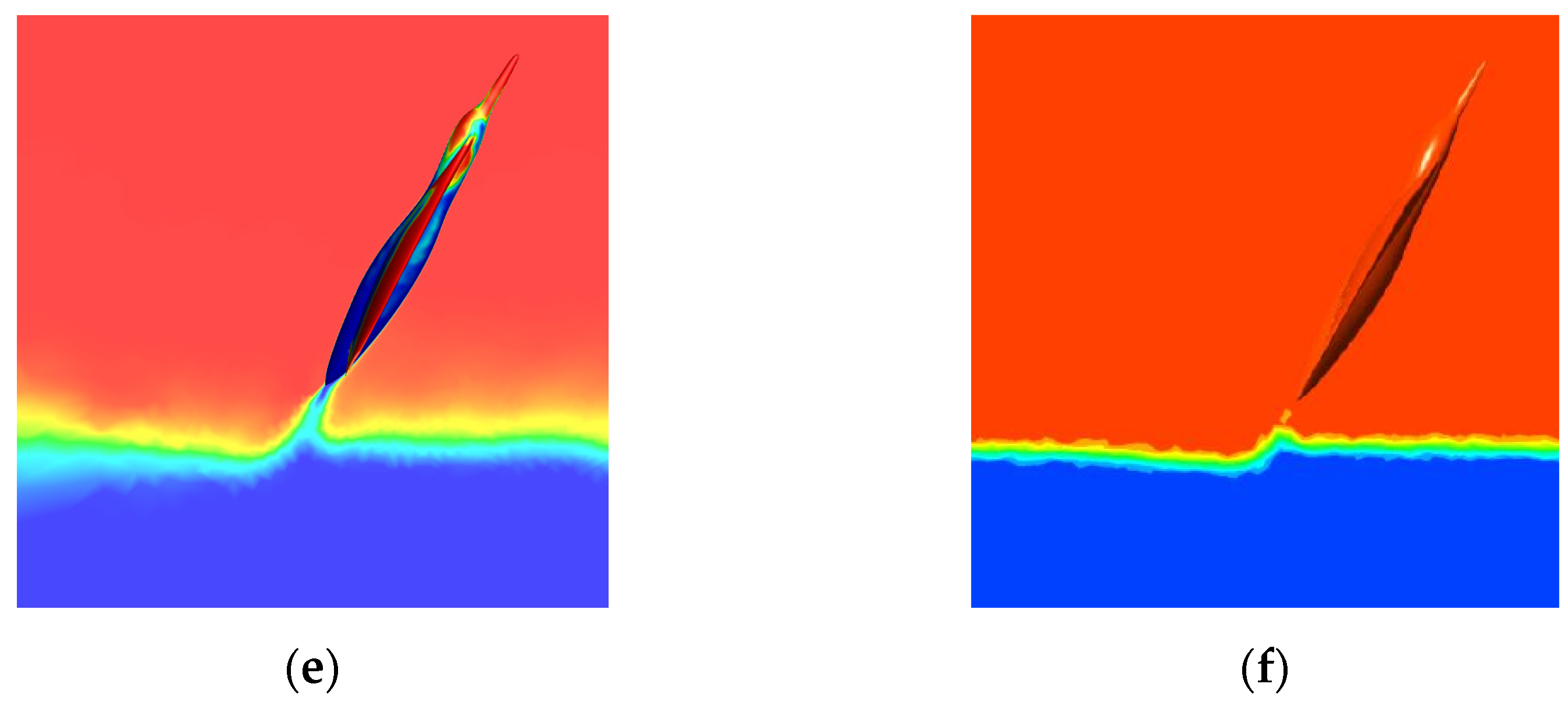
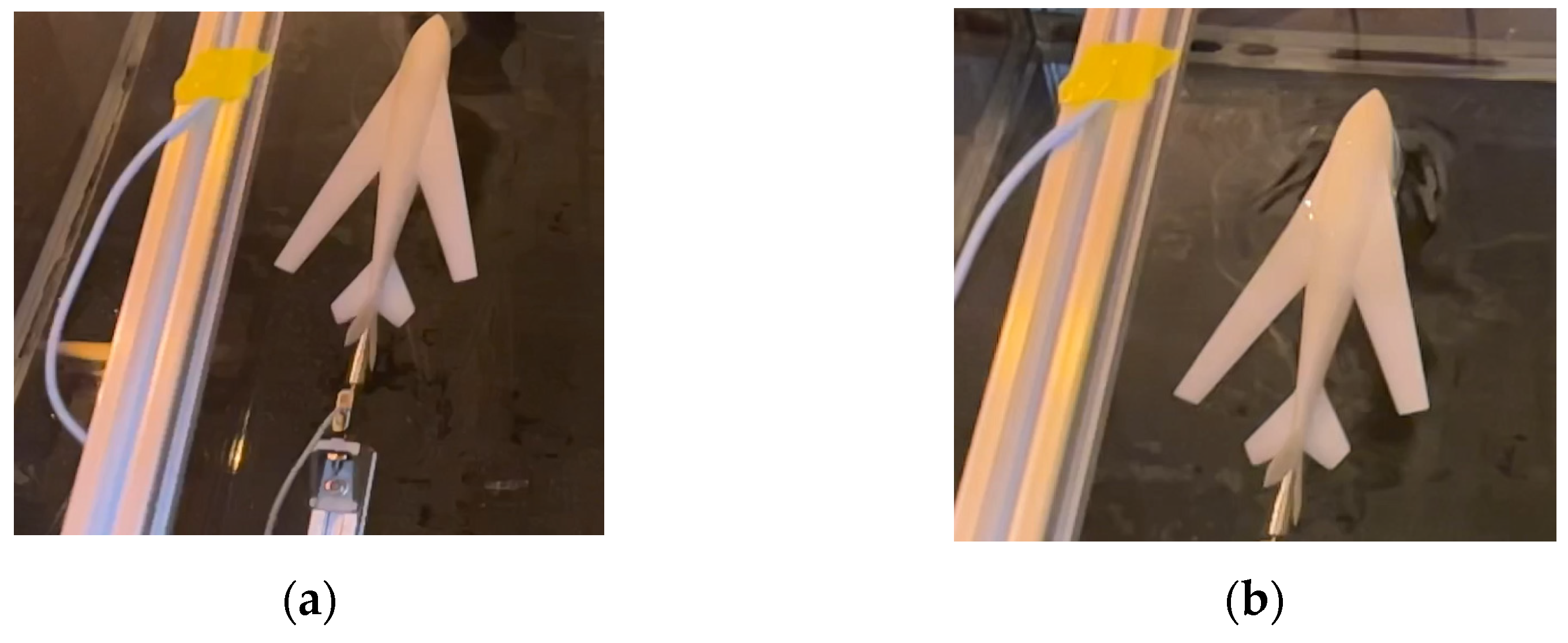
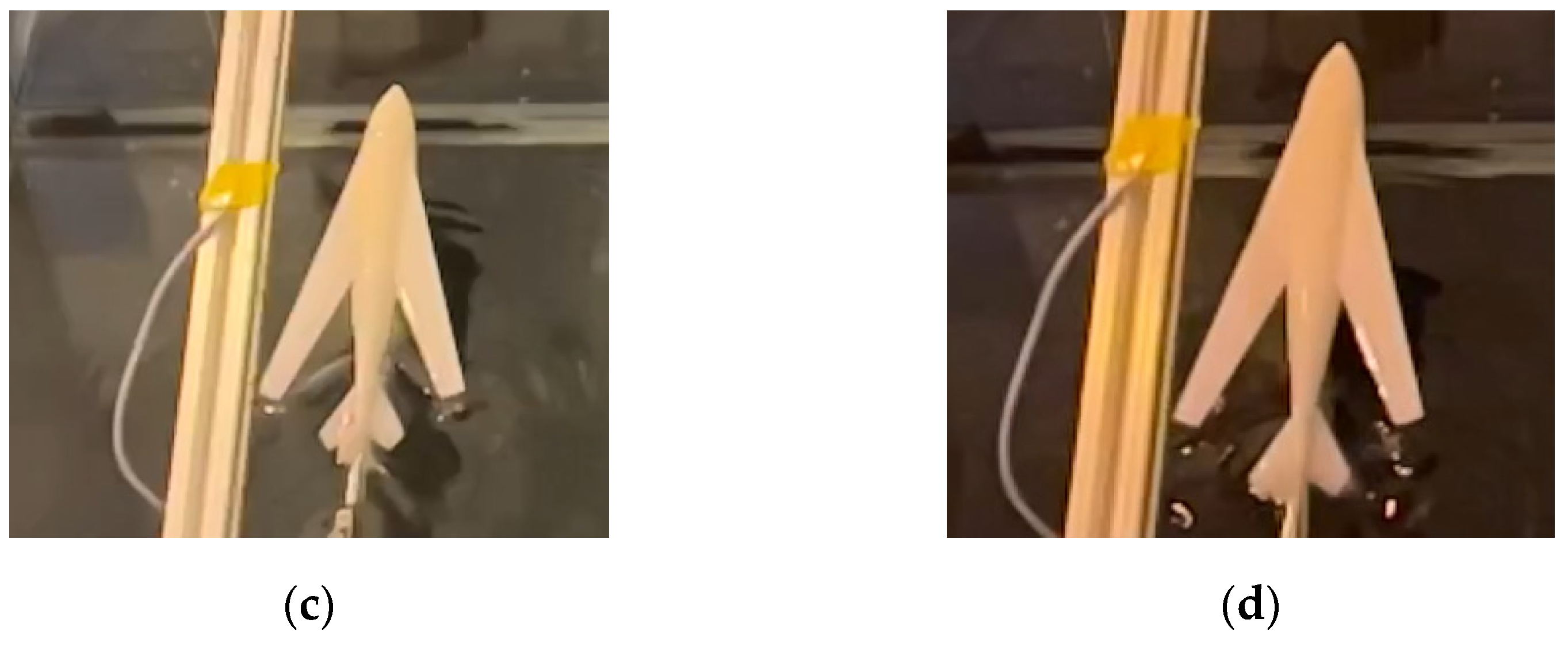
6.3.1. Water Cross-Over Phase Change of the Scale Model
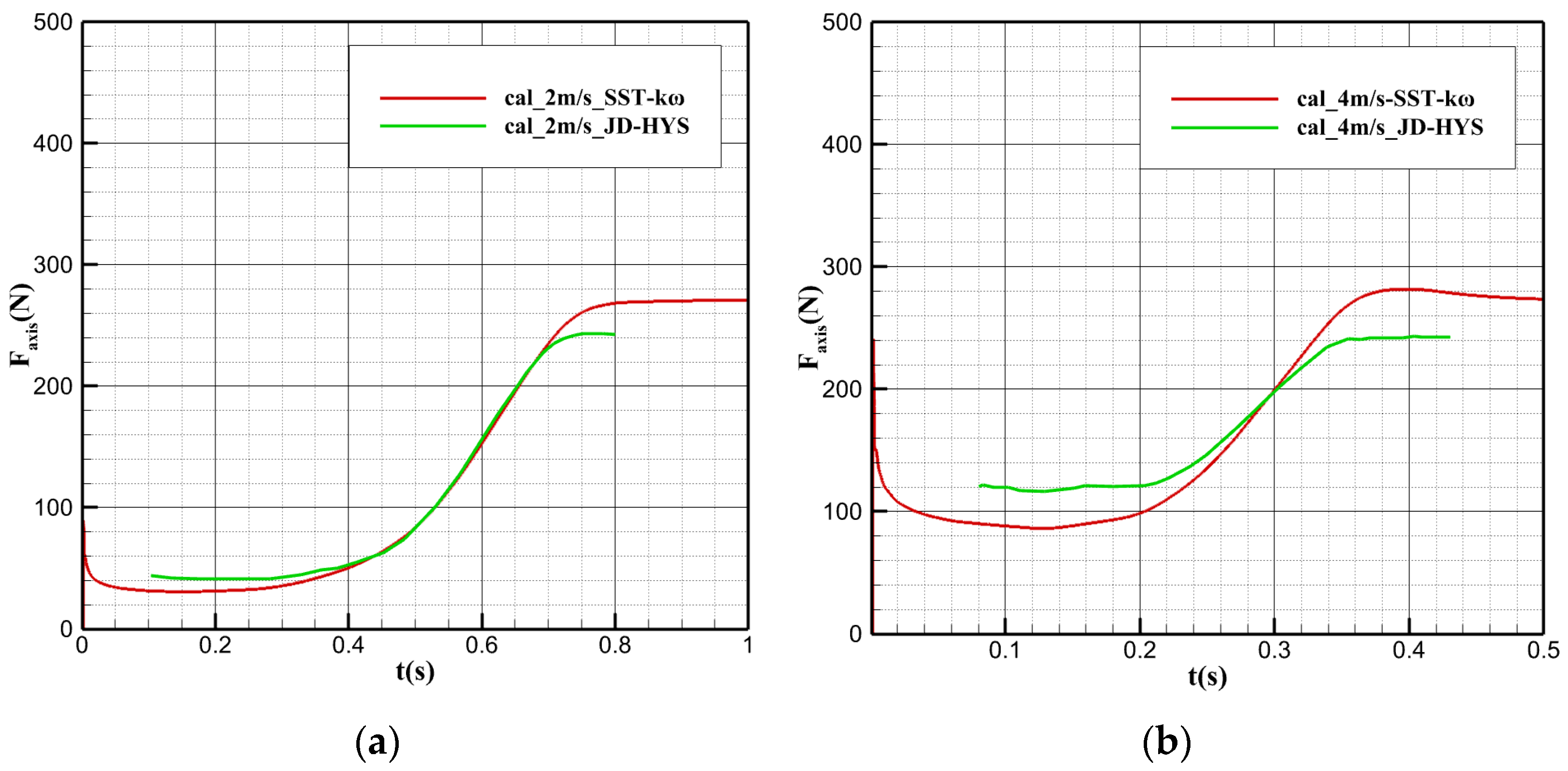
6.3.2. Changes in Axial Forces of the Scale Model
7. Conclusions
- (1)
- The bionic conceptual design of crossing over water is excellent by planning multiple stages and modes of motion. It can fully integrate flying fish features and bionic UAAV flight requirements of water cross-over.
- (2)
- The bionic UAAV, modeled as a flying fish, has an excellent variant configuration to adapt to water cross-over. It has a high essential aerodynamic and hydrodynamic performance. Its navigation stability is good, including longitudinal and lateral stability during water and air navigation. The cruise-flying lift–drag ratio is greater than 15 at a low Reynolds number.
- (3)
- The axial impact load of the bionic UAAV regularly increases with the angle and velocity. The pitching moment has a “water mound” forming and breaking when the bionic UAAV moves from the water–air interface to away from the water surface. These characteristics can work together with acceleration to fly near the water’s surface to achieve a normal process of outflowing water.
- (4)
- The phase and axial force of the water cross-over experiment and simulation can be agreed upon. The present method and the bionic variant configuration provide a feasible water cross-over design and analysis strategy for bionic UAAVs.
- (5)
- The present UAAV has bionic water cross-over and inverse kinematics characteristics of robotics. It is expected to have wide application in military and civilian fields, with the joint development of modern mechanical modeling and simulation methods related to Industry 4.0, multi-layer sensing systems, and airborne navigation systems.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Bardera, R.; Rodríguez-Sevillano, Á.A.; Barroso Barderas, E.; Matias Garcia, J.C. Computational Study of Aerodynamic Effects of the Dihedral and Angle of Attack of Biomimetic Grids Installed on a Mini UAV. Biomimetics 2024, 9, 12. [Google Scholar] [CrossRef] [PubMed]
- Guerrero, J.; Silvestri, P.; Canepa, A. Design of a Flapping Fins Mechanism for Roll Damping of Yachts at Anchor: Kinematic, Hydrodynamic and Structural Study. Biomimetics 2023, 8, 144. [Google Scholar] [CrossRef] [PubMed]
- Armanini, S.F.; Siddall, R.; Kovac, M. Correction: Modelling and simulation of a bioinspired aquatic micro aerial vehicle. In Proceedings of the AIAA Aviation 2019 Forum, Dallas, TX, USA, 17–21 June 2019. [Google Scholar]
- William, S.; Warren, W.; Marc, M.L.; Thomas, P.; Aaron, D.; Richard, G.; Mark, A.; Kara, P.; Ashok, G.; Matthew, B. Design and demonstration of a seabird-inspired fixed-wing hybrid UAV-UUV system. Bioinspir. Biomim. 2018, 13, 056013. [Google Scholar]
- Meadows, G.; Atkins, E.; Washabaugh, P.; Meadows, L.; Brown, J. The Flying Fish Persistent Ocean Surveillance Platform. In Proceedings of the AIAA Infotech@ Aerospace Conference, Seattle, WA, USA, 6–9 April 2009. [Google Scholar]
- Peña, I.; Billingsley, E.; Zimmerman, S.; Vasconcellos, R.; Abdelkefi, A. Comprehensive sizing process, actuation mechanism selection, and development of gannet-inspired amphibious drones. In Proceedings of the AIAA Aviation 2020 Forum, Virtual Event, 15–19 June 2020; pp. 1–10. [Google Scholar]
- Zhong, Y.; Meng, W.; Zizhong, L.; Long, C. Design and plunge-diving analysis of underwater-aerial transmedia vehicle of bionic kingfisher. Zhejiang Univ. (Eng. Sci.) 2020, 54, 407–415. [Google Scholar]
- Lu, Y.; Hu, J.; Chen, G.; Liu, A.; Feng, J. Optimization of water-entry and water-exit maneuver trajectory for morphing unmanned aerial-underwater vehicle. Ocean Eng. 2022, 261. [Google Scholar] [CrossRef]
- Geder, J.D.; Ramamurti, R.; Edwards, D.; Young, T.; Pruessner, M. Development of a robotic fin for hydrodynamic propulsion and aerodynamic control. In Proceedings of the 2014 Oceans-St. John’s, St. John’s, NL, Canada, 14–19 September 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 1–7. [Google Scholar]
- Geder, J.D.; Ramamurti, R.; Edwards, D.; Young, T.; Pruessner, M. Swimming performance of a hybrid unmanned air-underwater vehicle. In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, USA, 19–23 September 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1–5. [Google Scholar]
- Hou, T.; Su, H.; Jiang, B.; Chen, L.; Wang, T.; Liang, J.; Yang, X. Design and experiments of a squid-like aquatic-aerial vehicle with soft morphing fins and arms. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 4681–4687. [Google Scholar]
- Wick, A.T.; Zink, G.A.; Ruszkowski, R.A.; Shih, T.I.P. Computational simulation of an unmanned air vehicle impacting water. In Proceedings of the 45th AIAA Aerospace Sciences Meeting and Exhibit, Reno, Nevada, 8–11 January 2007. [Google Scholar]
- Yang, X.; Liang, J.; Wang, T.; Yao, G.; Han, C. Computational simulation of a submersible uncrewed aerial vehicle impacting with water. In Proceedings of the 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO), Shenzhen, China, 12–14 December 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1138–1143. [Google Scholar]
- Yang, X.; Wang, T.; Liang, J.; Yao, G.; Chen, Y.; Shen, Q. Numerical analysis of biomimetic gannet impacting with water during plunge-diving. In Proceedings of the 2012 IEEE International Conference on Robotics and Biomimetics (ROBIO), Guangzhou, China, 11–14 December 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 569–574. [Google Scholar]
- Backer, D.G.; Vantorre, M.; Beels, C.; De Pré, J.; Victor, S.; De Rouck, J.; Blommaert, C.; Van Paepegem, W. Experimental investigation of water impact on axisymmetric bodies. Appl. Ocean Res. 2009, 31, 143–156. [Google Scholar] [CrossRef]
- Lock, R.J.; Burgess, S.C.; Vaidyanathan, R. Impact of marine locomotion constraints on a bio-inspired aerial-aquatic wing: Experimental Performance Verification. J. Mech. Robot. 2013, 6, 011001. [Google Scholar] [CrossRef]
- Yang, X.; Wang, T.; Liang, J.; Yao, G.; Zhao, W. Submersible Unmanned Aerial Vehicle Concept Design Study. In Proceedings of the 2013 Aviation Technology, Integration, and Operations Conference, Los Angeles, CA, USA, 12–14 August 2013. [Google Scholar]
- Crouse, G. Conceptual Design of a Submersible Airplane. In Proceedings of the 48th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 4–7 January 2015. [Google Scholar]
- Davenport, J. How and why do flying fish fly? Rev. Fish Biol. Fish. 1994, 4, 184–214. [Google Scholar] [CrossRef]
- Yao, G.; Liang, J.; Wang, T.; Yang, X.; Zhang, Y. Submersible unmanned flying boat: Design and experiment. In Proceedings of the 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014), Bali, Indonesia, 5–10 December 2014. [Google Scholar]
- Liang, J.; Yao, G.; Wang, T.; Yang, X.; Zhao, W.; Song, G.; Zhang, Y. Wing load investigation of the plunge-diving locomotion of a gannet Morus inspired submersible aircraft. Sci. Sin. Technol. 2014, 57, 390–402. [Google Scholar] [CrossRef]
- Wang, T.M.; Yang, X.B.; Liang, J.H.; Yao, G.C.; Zhao, W.D. CFD based investigation on the impact acceleration when a gannet impacts with water during plunge diving. Bioinspir. Biomim. 2013, 8, 036006. [Google Scholar] [CrossRef] [PubMed]
- Liang, J.; Yang, X.; Wang, T.; Yao, G.; Zhao, W. Design and Experiment of a Bionic Gannet for Plunge-Diving. J. Bionic Eng. 2013, 10, 282–291. [Google Scholar] [CrossRef]
- Yang, X.; Wang, T.; Liang, J.; Yao, G.; Liu, M. Survey on the novel hybrid aquatic–aerial amphibious aircraft: Aquatic unmanned aerial vehicle (AquaUAV). Prog. Aerosp. Sci. 2015, 74, 131–151. [Google Scholar] [CrossRef]
- Weisshaar, T.A. Morphing Aircraft Systems: Historical Perspectives and Future Challenges. J. Aircr. 2013, 50, 337–353. [Google Scholar] [CrossRef]
- Eubank, R.D.; Atkins, E.M. Autonomous Guidance and Control of the Flying Fish Ocean Surveillance Platform. In Proceedings of the AIAA Infotech@ Aerospace Conference, Seattle, WA, USA, 6–9 April 2009. [Google Scholar]
- Atkins, E.M.; Eubank, R.D.; Klesh, A.T. Reconfigurable Flight Management System for Small-Scale Unmanned Air Systems. In Proceedings of the AIAA Infotech@ Aerospace Conference, Seattle, WA, USA, 6–9 April 2009. [Google Scholar]
- Siddall, R.; Kovač, M. Launching the AquaMAV: Bioinspired design for aerial–aquatic robotic platforms. Bioinspir. Biomim. 2014, 9, 031001. [Google Scholar] [CrossRef] [PubMed]
- Ma, K.Y.; Chirarattananon, P.; Fuller, S.B.; Wood, R.J. Controlled Flight of a Biologically Inspired, Insect-Scale Robot. Am. Assoc. Adv. Sci. 2013, 340, 603–607. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.; Helbling, E.F.; Gravish, N.; Ma, K. Hybrid aerial and aquatic locomotion in an at-scale robotic insect. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; IEEE: Piscataway, NJ, USA, 2015. [Google Scholar]
- Lu, D.; Xiong, C.; Zeng, Z.; Lian, L. A Multimodal Aerial Underwater Vehicle with Extended Endurance and Capabilities. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019. [Google Scholar]
- Yao, R.; Zhao, X.; Wang, Q.; Zheng, Y.; Li, H. Research on Aerodynamic and Hydrodynamic Performance and Exiting Water Process of a Morphing AquaUAV. In Proceedings of the AIAA Propulsion and Energy 2021 Forum, Virtual Event, 9–11 August 2021. [Google Scholar]
- Park, H.; Choi, H. Aerodynamic characteristics of flying fish in gliding flight. J. Exp. Biol. 2010, 213, 3269–3279. [Google Scholar] [CrossRef] [PubMed]
- Howell, S.N.G. The Amazing World of Flyingfish; Princeton University Press: Princeton, NJ, USA, 2014. [Google Scholar]
- Zimmerman, C.H. Characteristics of Clark Y airfoils of small aspect ratios. NACA Rep. 1932, 12. Available online: http://naca.central.cranfield.ac.uk/reports/1933/naca-report-431.pdf (accessed on 10 March 2023).
- Wilcox, D.C. Turbulence Modeling for CFD; DCW Industries: La Canada, CA, USA, 2006. [Google Scholar]
- Van Doormaal, J.P.; Raithby, G.D. Enhancements of the simple method for predicting incompressible fluid flows. Numer. Heat Transf. Appl. 1984, 7, 147–163. [Google Scholar]
- Shih, T.H.; Liou, W.W.; Shabbir, A.; Yang, Z.; Zhu, J. A New κ-ε Eddy Viscosity Model for High Reynolds Number Turbulent Flows. Comput. Fluids 1995, 24, 227–238. [Google Scholar] [CrossRef]
- Launder, B.E.; Spalding, D.B. Lectures in Mathematical Model of Turbulence; Academic Press: Cambridge, MA, USA, 1972. [Google Scholar]
- Gan, W.B. Research on Aerodynamic Numerical Simulation and Design of Near Space Low-Reynolds Unmanned Aerial Vehicles; Northwestern Polytechnical University: Xi’an, China, 2014. [Google Scholar]
- He, Y.S. Fusion Design of Hydrodynamic and Aerodynamic Layout and Analysis of Characteristics of Cross-Over Water for the Bionic Cross-Medium Aircraft; Jilin University: Changchun, China, 2021. [Google Scholar]
- Guo, H.; Lian, Q.X. Simultaneous dynamic force measurements and flow visualization techniques in water tunnel. Exp. Meas. Fluid Mech. 2004, 18, 75–79. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Type Value | Parameter Type Value |
|---|---|
| Length/m | 0.606 |
| Width/m | 0.041 |
| Height/m | 0.091 |
| Part | Parameter Type | Value |
|---|---|---|
| Wing | Span/m | 0.239 |
| Exposed area/m2 | 0.0326 | |
| Chord length/m | 0.212 | |
| Horizontal tail | Span/m | 0.09439 |
| Exposed area/m2 | 0.0067 | |
| Vertical fin | Span/m | 0.18 |
| Exposed area/m2 | 0.009 |
| Part | Parameter Type | Value |
|---|---|---|
| Wing | Span/m | 0.834 |
| Exposed area/m2 | 0.037 | |
| Chord length/m | 0.07 | |
| Horizontal tail | Span/m | 0.2 |
| Exposed area/m2 | 0.011 | |
| Upper vertical fin | Span/m | 0.09 |
| Exposed area/m2 | 0.0045 | |
| Lower vertical fin | Span/m | 0.145 |
| Exposed area/m2 | 0.0072 |
| Part | Parameter Type | Value |
|---|---|---|
| Wing | Span/m | 0.834 |
| Exposed area/m2 | 0.037 | |
| Chord length/m | 0.07 | |
| Horizontal tail | Span/m | 0.2 |
| Exposed area/m2 | 0.011 | |
| Vertical fin | Span/m | 0.18 |
| Exposed area/m2 | 0.009 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gan, W.; Zuo, Z.; Zhuang, J.; Bie, D.; Xiang, J. Aerodynamic/Hydrodynamic Investigation of Water Cross-Over for a Bionic Unmanned Aquatic–Aerial Amphibious Vehicle. Biomimetics 2024, 9, 181. https://doi.org/10.3390/biomimetics9030181
Gan W, Zuo Z, Zhuang J, Bie D, Xiang J. Aerodynamic/Hydrodynamic Investigation of Water Cross-Over for a Bionic Unmanned Aquatic–Aerial Amphibious Vehicle. Biomimetics. 2024; 9(3):181. https://doi.org/10.3390/biomimetics9030181
Chicago/Turabian StyleGan, Wenbiao, Zhenjie Zuo, Junjie Zhuang, Dawei Bie, and Jinwu Xiang. 2024. "Aerodynamic/Hydrodynamic Investigation of Water Cross-Over for a Bionic Unmanned Aquatic–Aerial Amphibious Vehicle" Biomimetics 9, no. 3: 181. https://doi.org/10.3390/biomimetics9030181
APA StyleGan, W., Zuo, Z., Zhuang, J., Bie, D., & Xiang, J. (2024). Aerodynamic/Hydrodynamic Investigation of Water Cross-Over for a Bionic Unmanned Aquatic–Aerial Amphibious Vehicle. Biomimetics, 9(3), 181. https://doi.org/10.3390/biomimetics9030181