
Snake Robot with Motion Based on Shape Memory Alloy Spring-Shaped Actuators

 , and
, and
Abstract
1. Introduction
2. Programming of the SMA Actuators
2.1. Nitinol Preprogramming
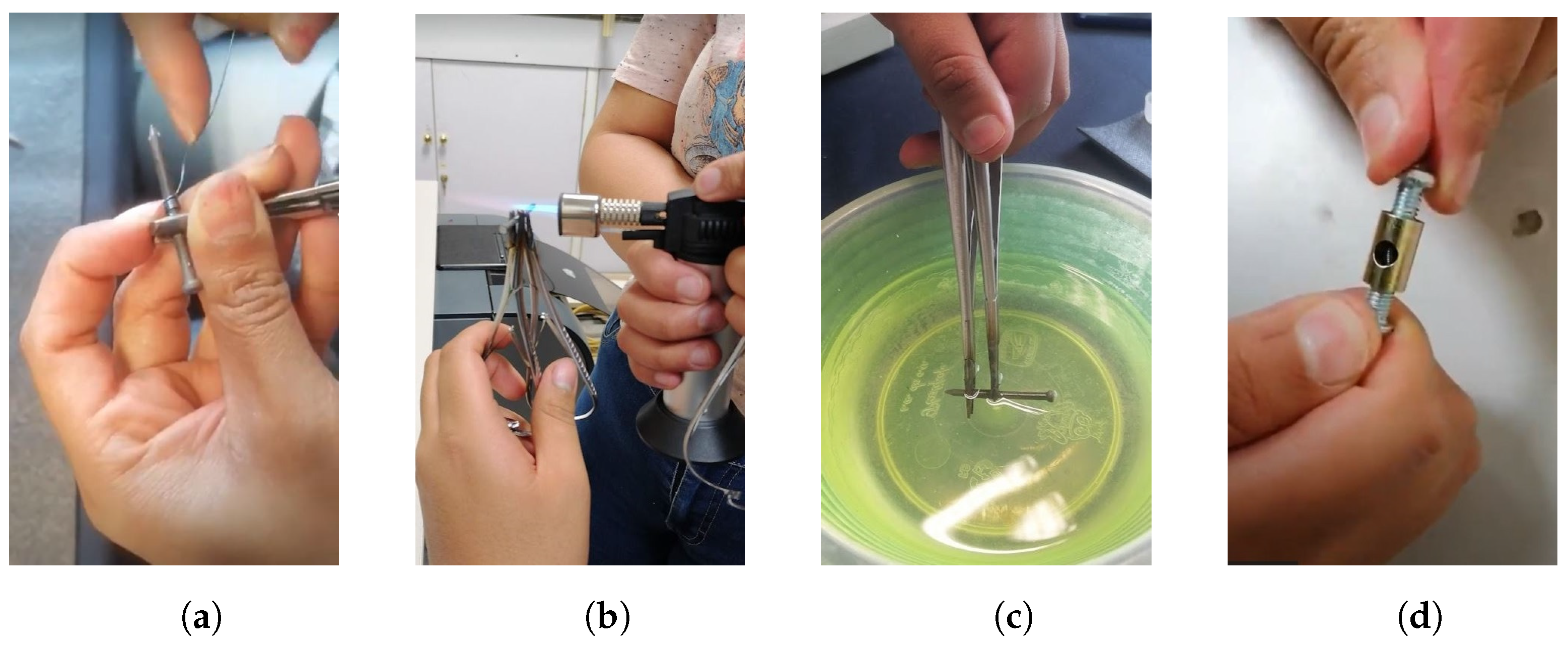
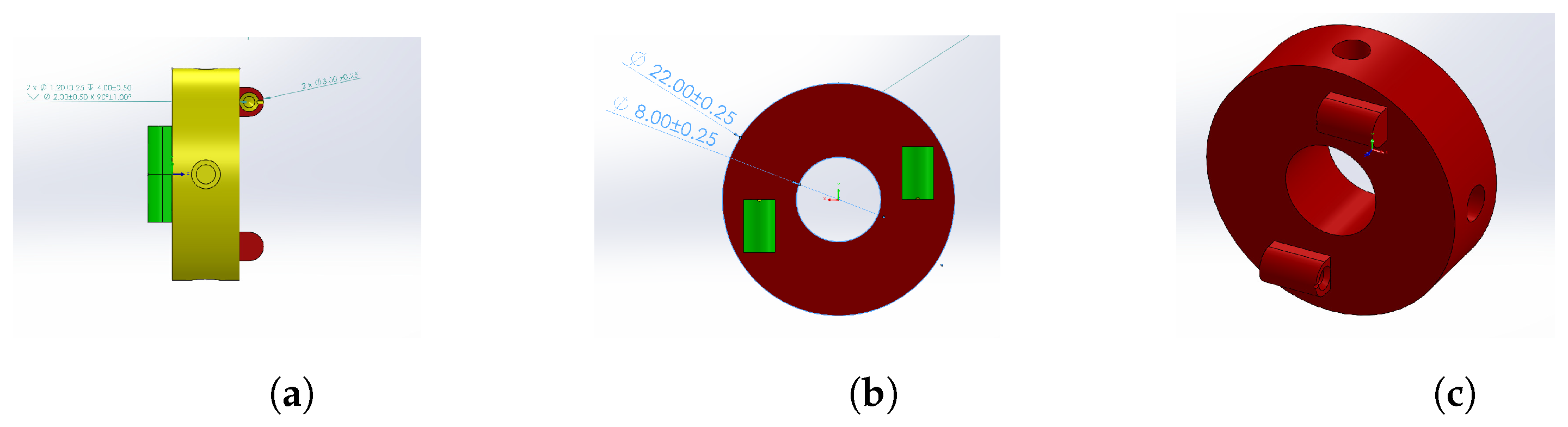
- Using a Matthews clamp, one end of approximately 1.5 cm of the proximal portion of a 20 cm long nitinol wire was attached to a 2.8 mm diameter cylindrical metal structure, thus verifying that it was firmly immobilized. The rest of the cable was wound up manually while taking care that the generated turns were aligned and without any space between them. Using another Matthews clamp, the distal end was grasped, and, thus, the shape of the spring was secured in the metal barrel (see Figure 1a).
- Heat was applied to the spring, which was generated in the metal cylinder using a torch. During the application of heat, it was visually validated at all times that the material did not denature, which occurs if the wire presents a color change to white. The application of heat was stopped once a homogeneous color change to a copper color throughout the entire length of the spring was observed, as depicted in Figure 1b.
- A tub of water was used to dissipate the heat from the clips and spring such that it could be removed from the cylindrical metal frame (see Figure 1c). The remaining water was then removed from the spring in order to avoid rust forming on the material during the following stages.
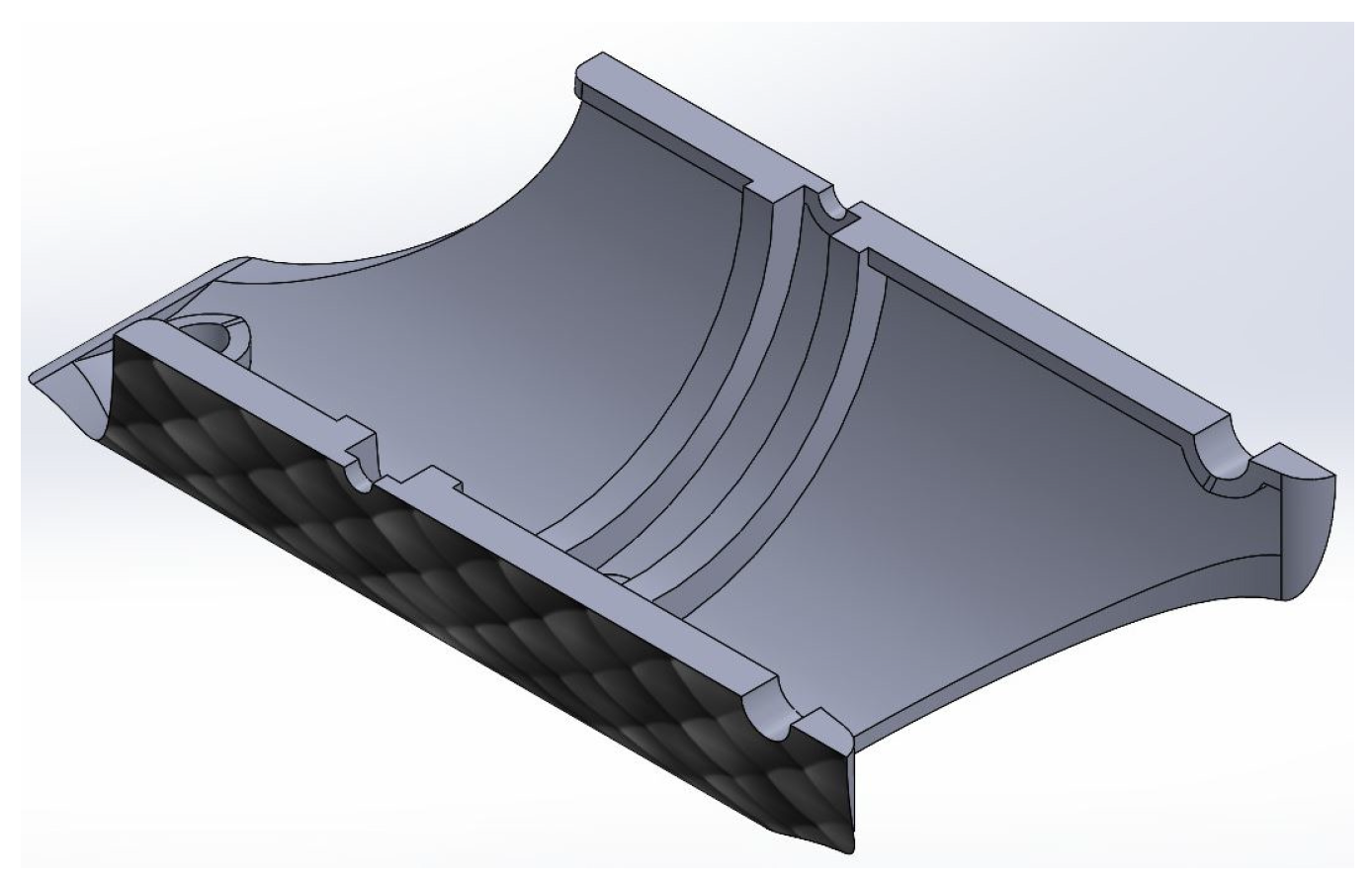
- Finally, the spring was placed inside a structure as a mechanical constraint in order to ensure the conservation of its shape in the annealing process (as shown in Figure 1d).
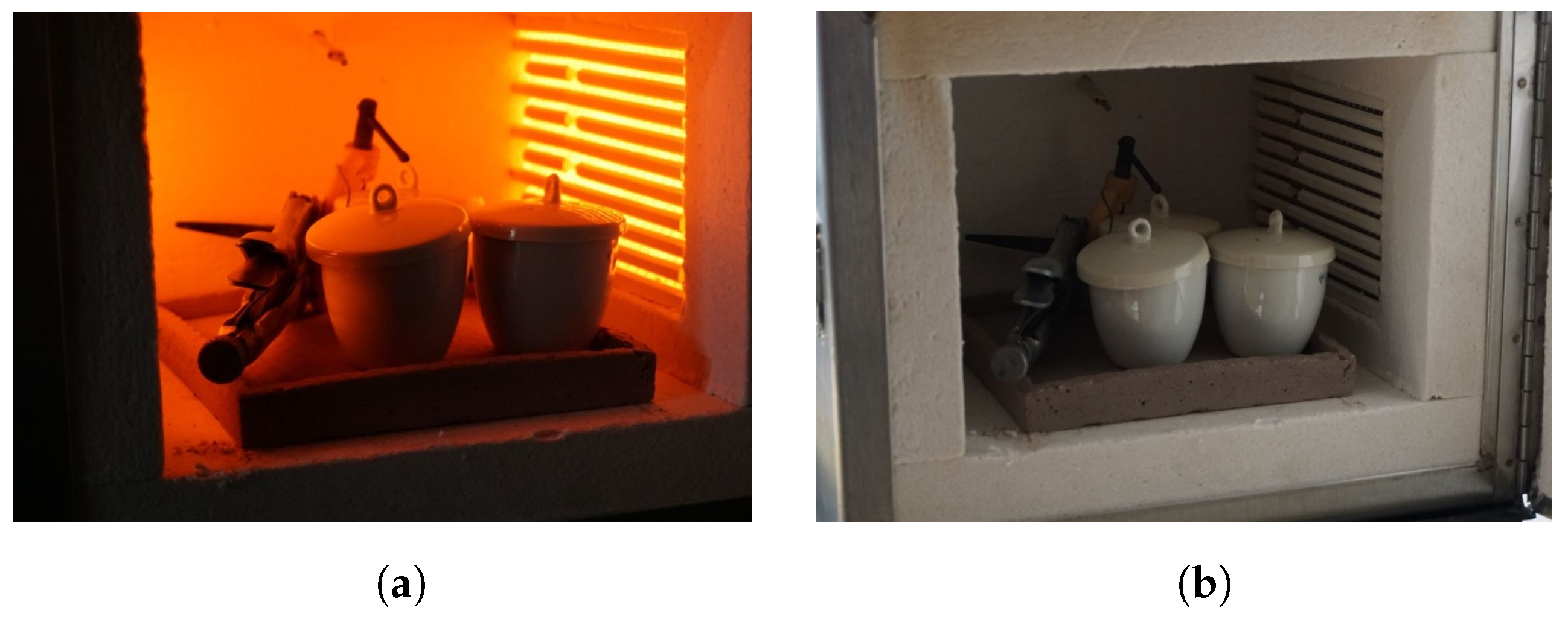
2.2. Annealing
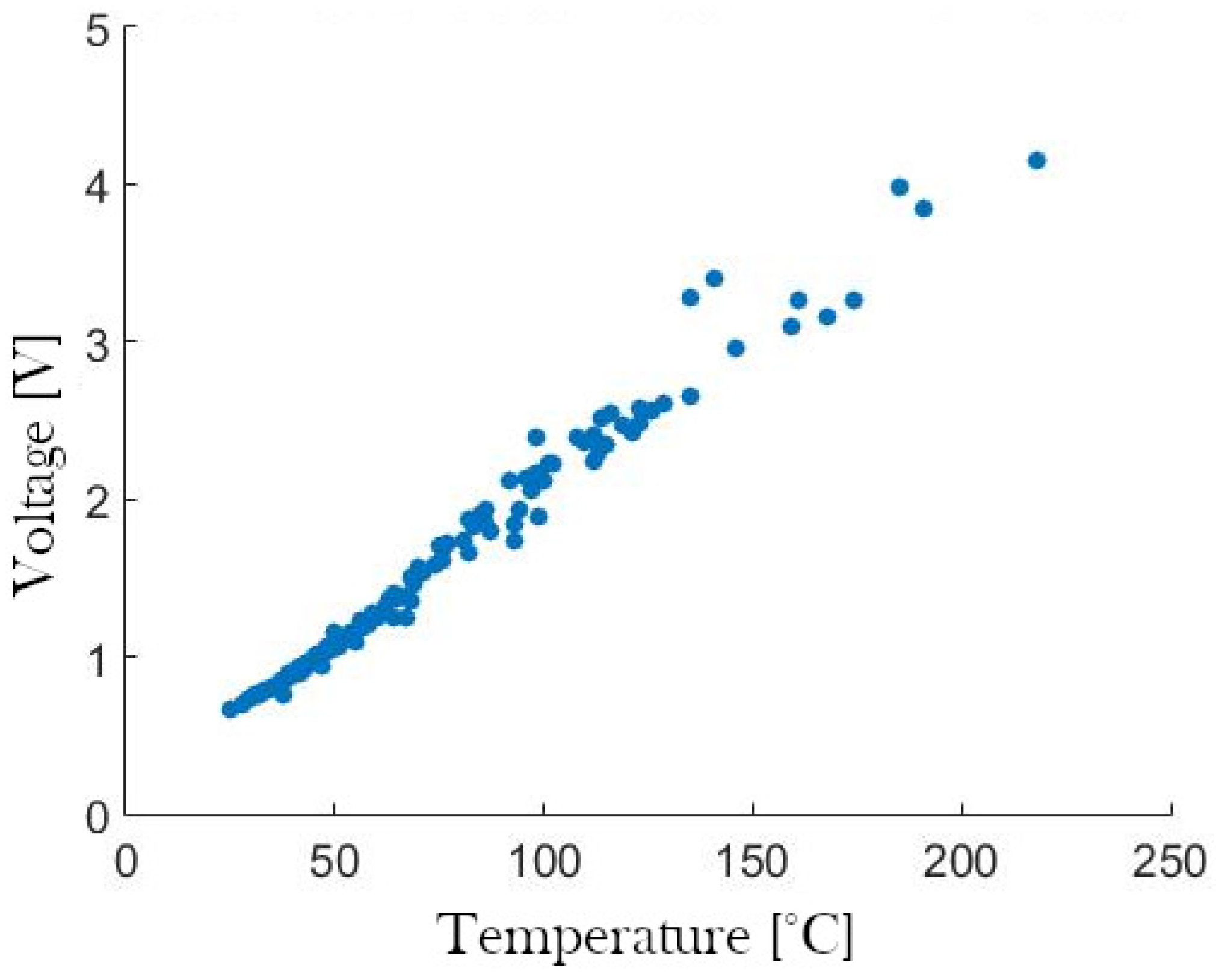
2.3. Sensors Associated with the SMA Actuators
3. Computer-Aided Preliminary Design
- It articulates the links with each other in order to allow the motion of the joint.
- It acts as an anchoring surface for the springs when installed in the median plane transversely in the links.
3.1. Mechanism Adaptations
- To facilitate assembly of the robot, the dimensions of the links were increased by 25%. The robot assembly approach was also modified by segmenting the proximal, modular, and distal links according to the median plane of its longitudinal axis, which was carried out in addition to reducing the weight of the mechanism derived from the increase in dimensions.
- For the new assembly approach, a distinction was considered between the rotational joints that interconnected the links from internal spring anchor joints.
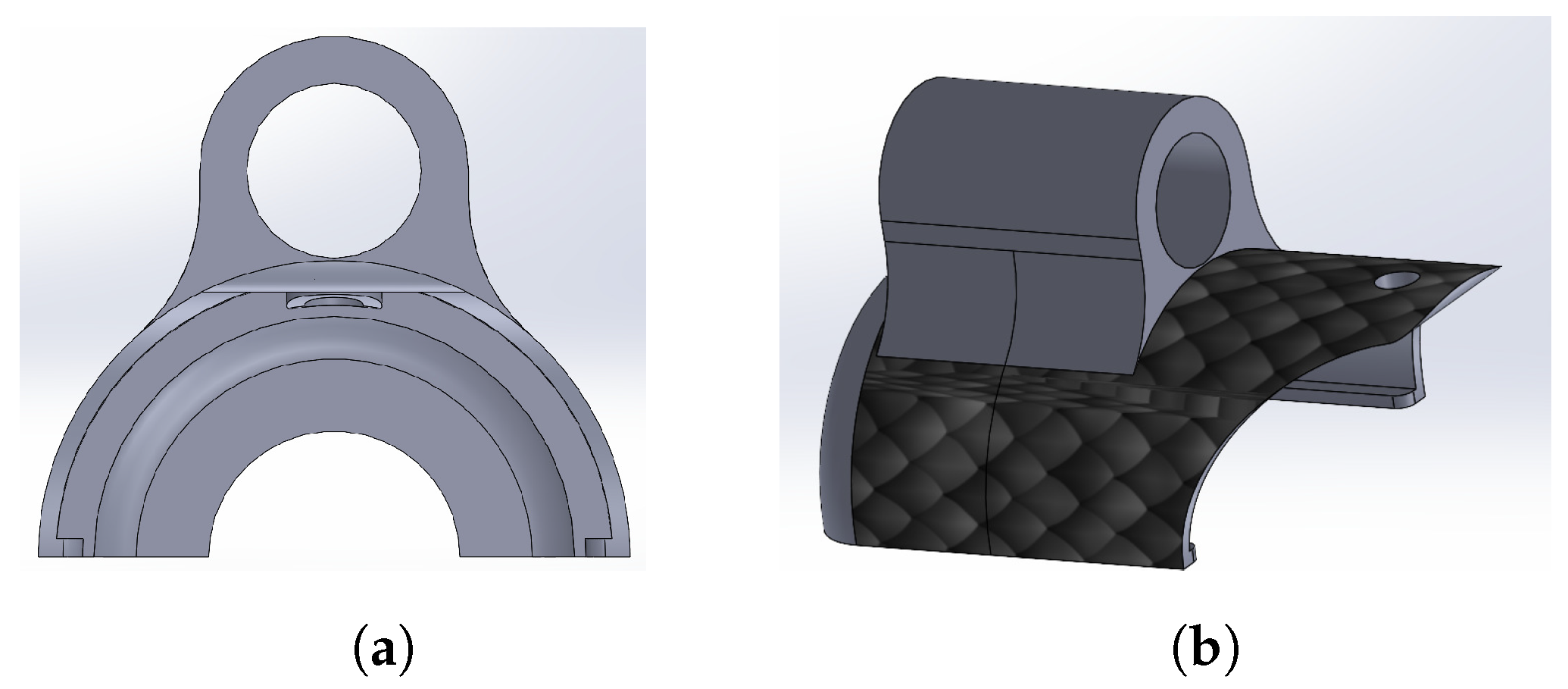
3.2. Modular Link
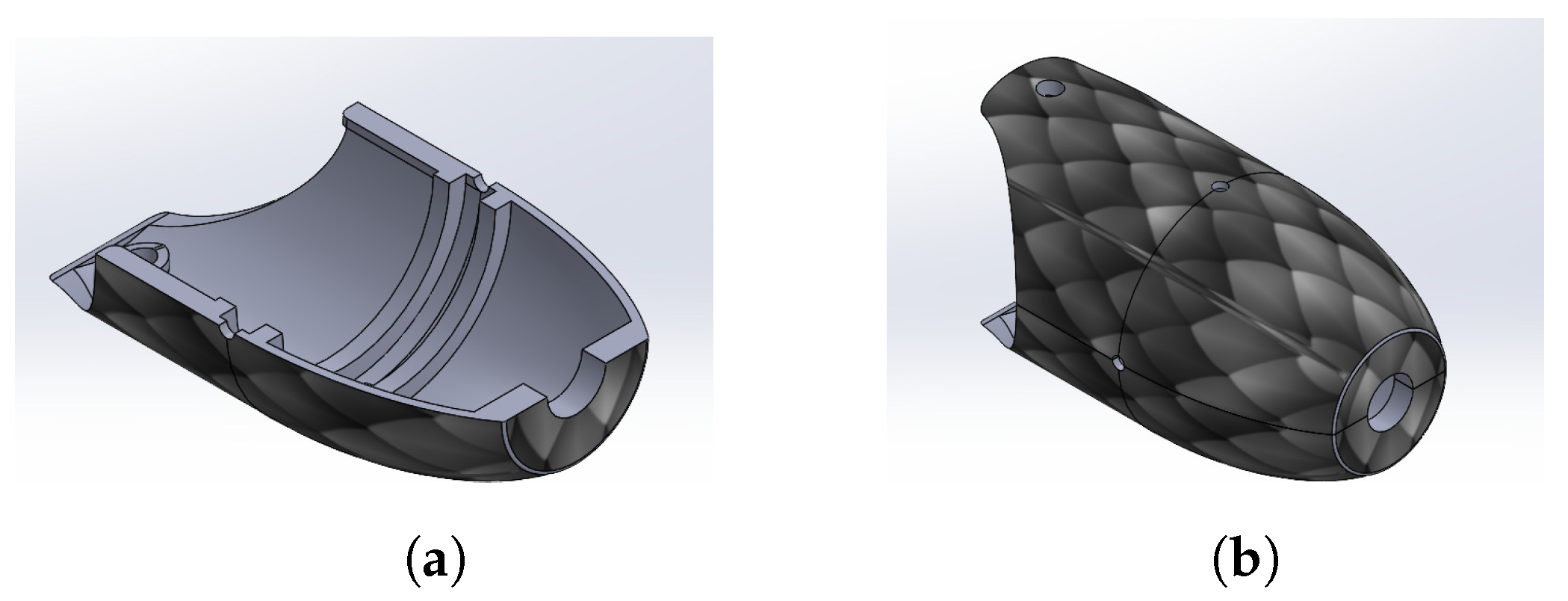
3.3. Proximal Link
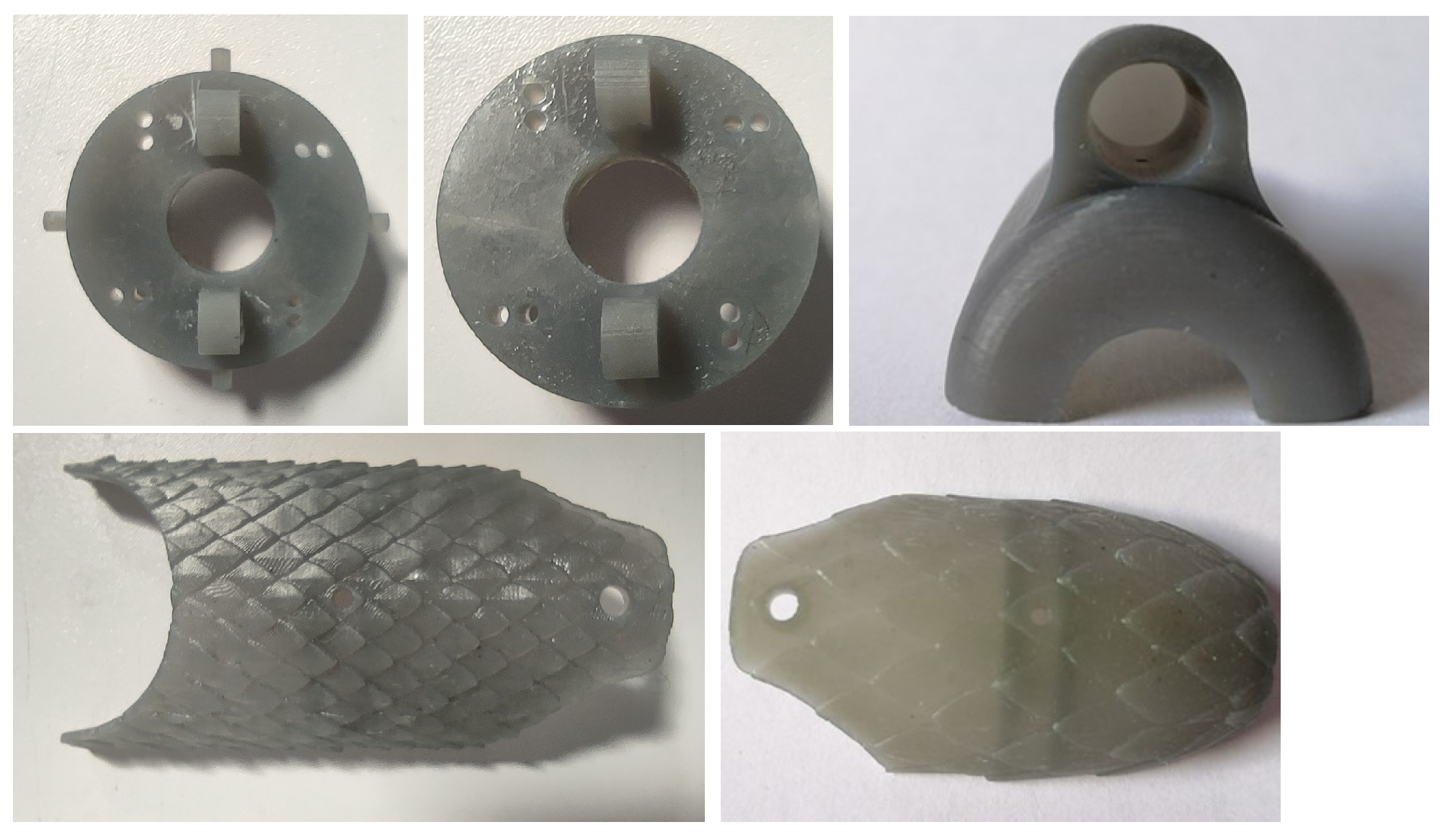
3.4. The 3D Printing of the CAD Proposals
4. Snake Robot Model
4.1. Kinematic Model
4.2. Dynamical Model
5. Snake Motion Implementation
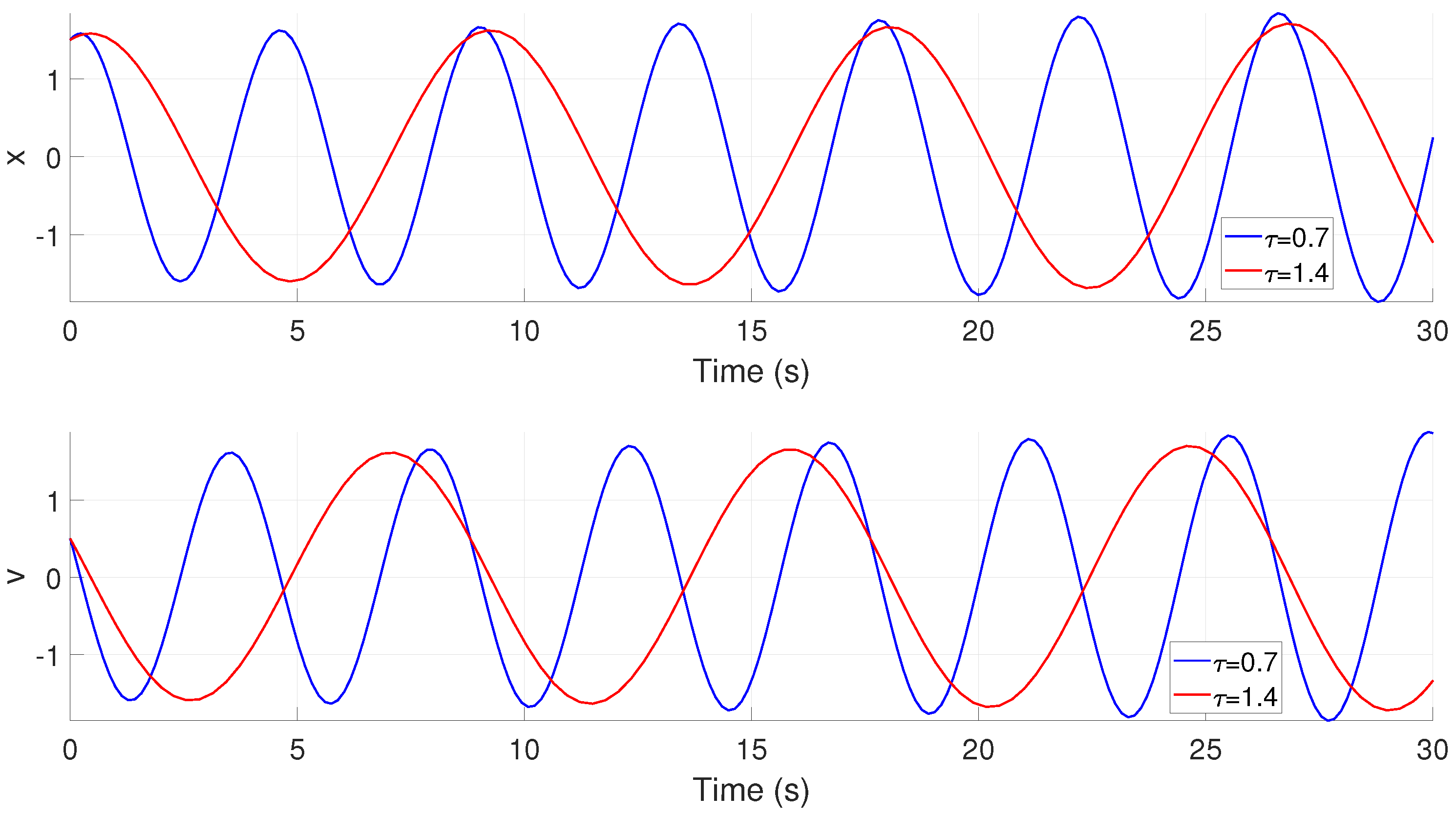
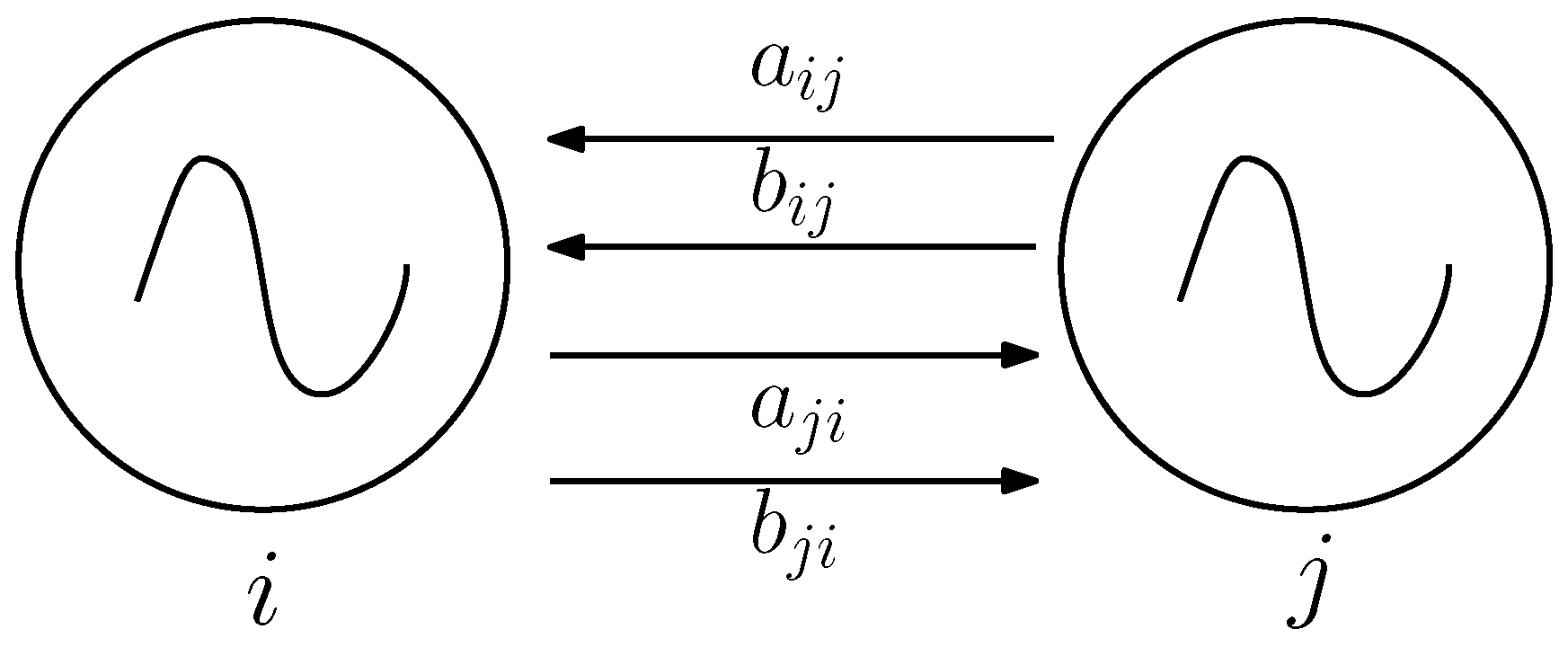
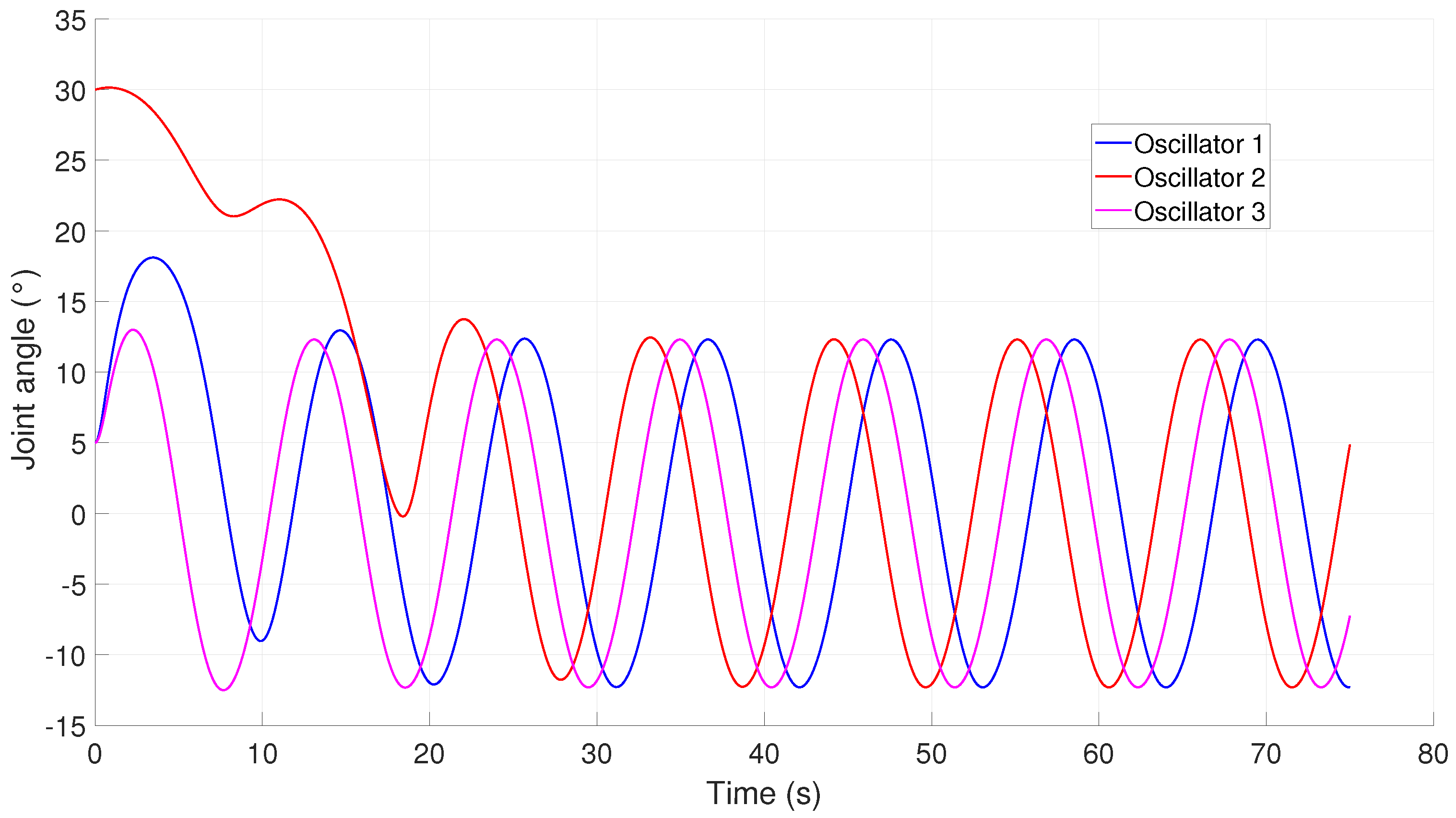
5.1. Central Pattern Generator for Snake Gait
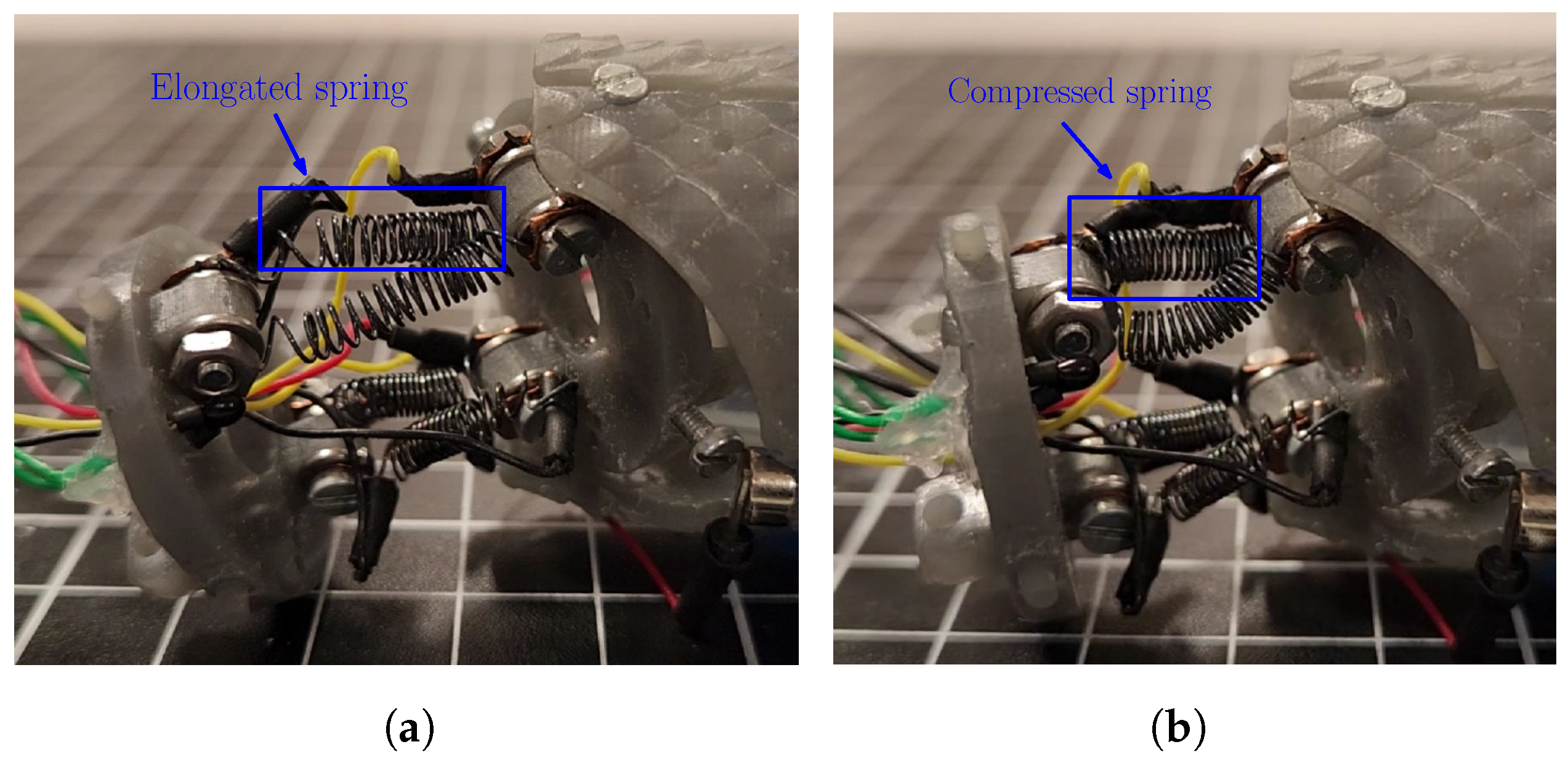
5.2. Agonist–Antagonist Control Scheme
6. Integration and Results
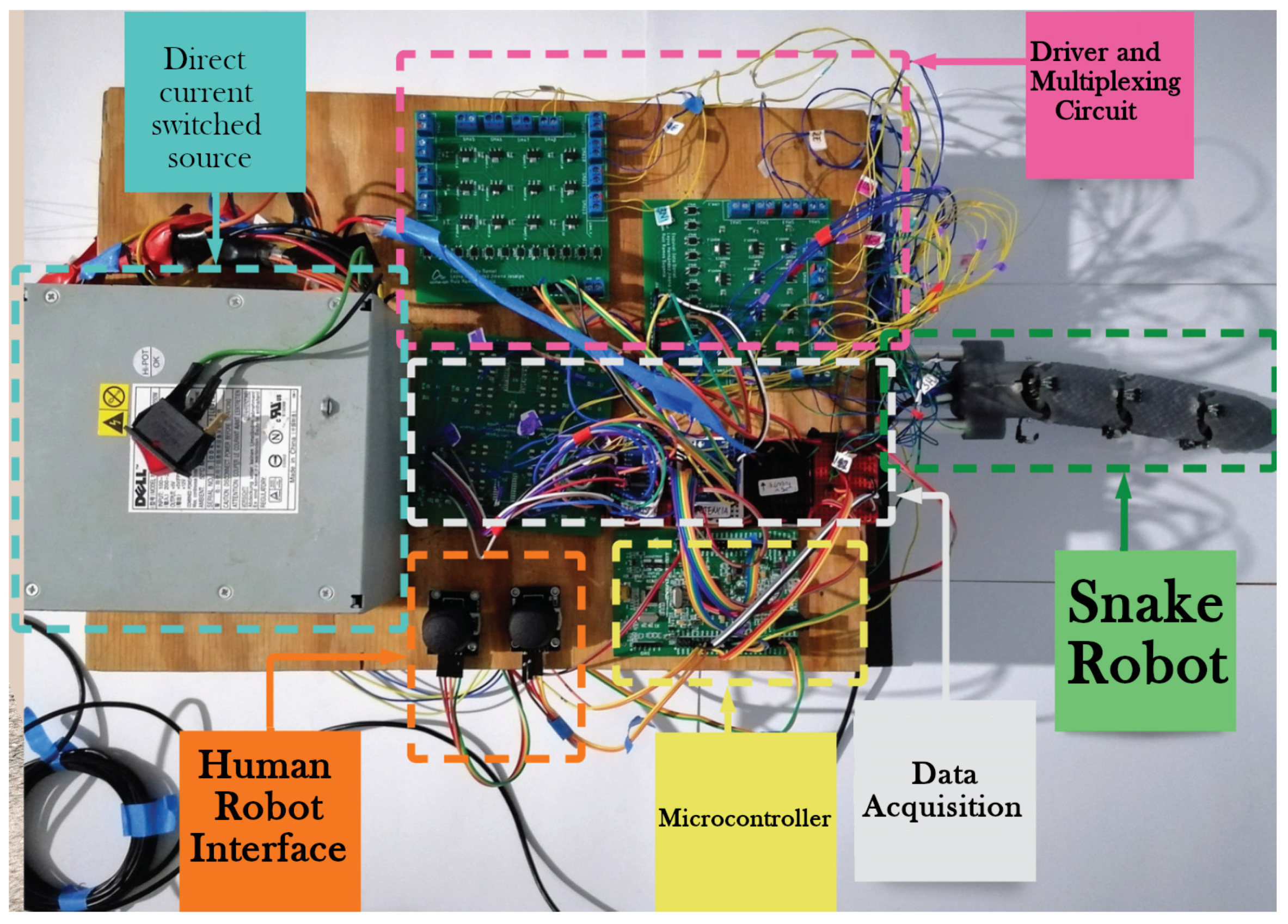
6.1. Mechanical and Instrumentation Implementation
- Direct current switched mode: This consists of a 12 V voltage source with a power of 120 Watts to provide sufficient current for the SMA actuators.
- Driver and multiplexing Circuit: This provides the implementation of the analog multiplexers to enable measurement of all the required signals by the sensors with a minimum number of analog channels.
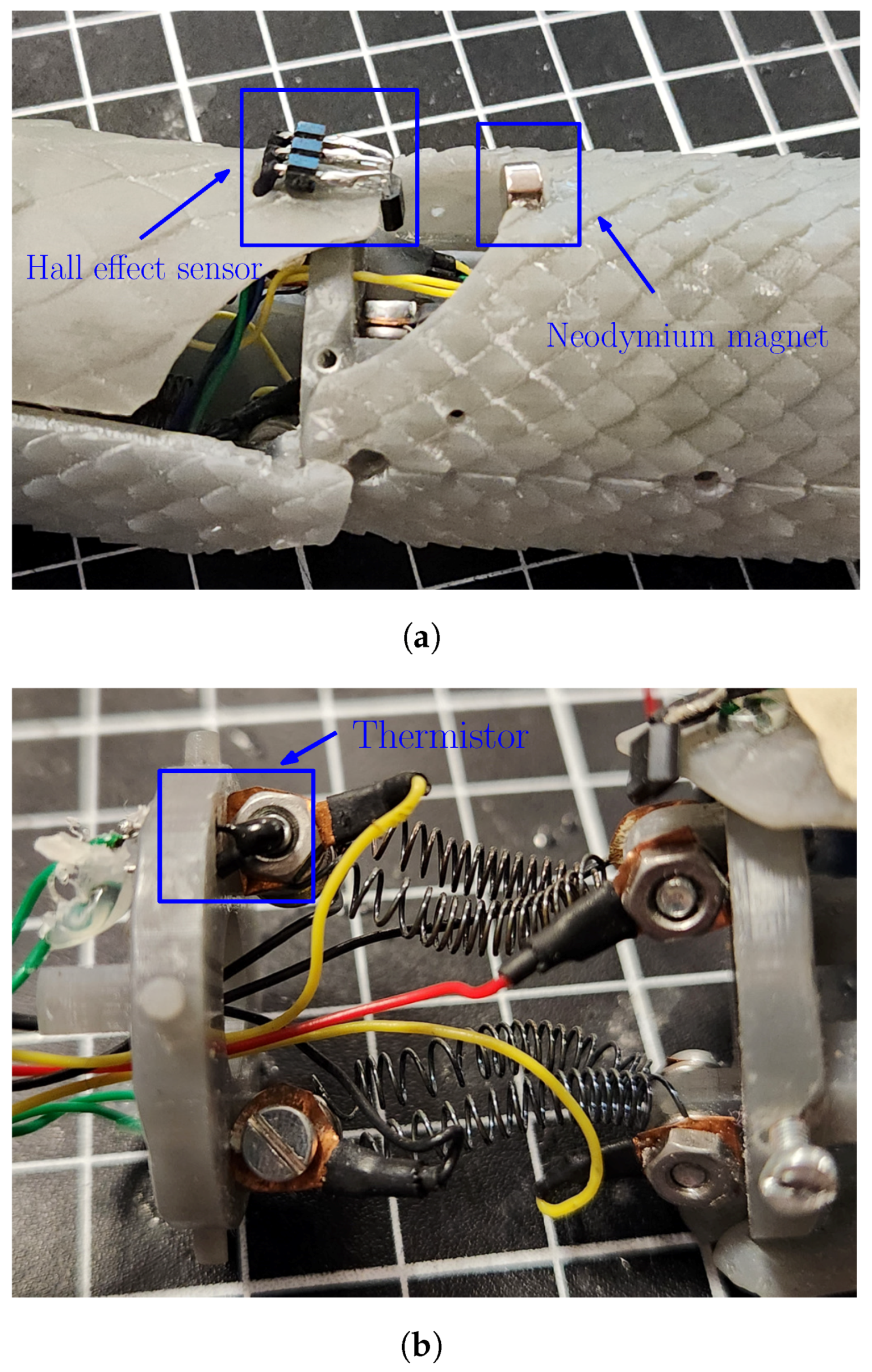
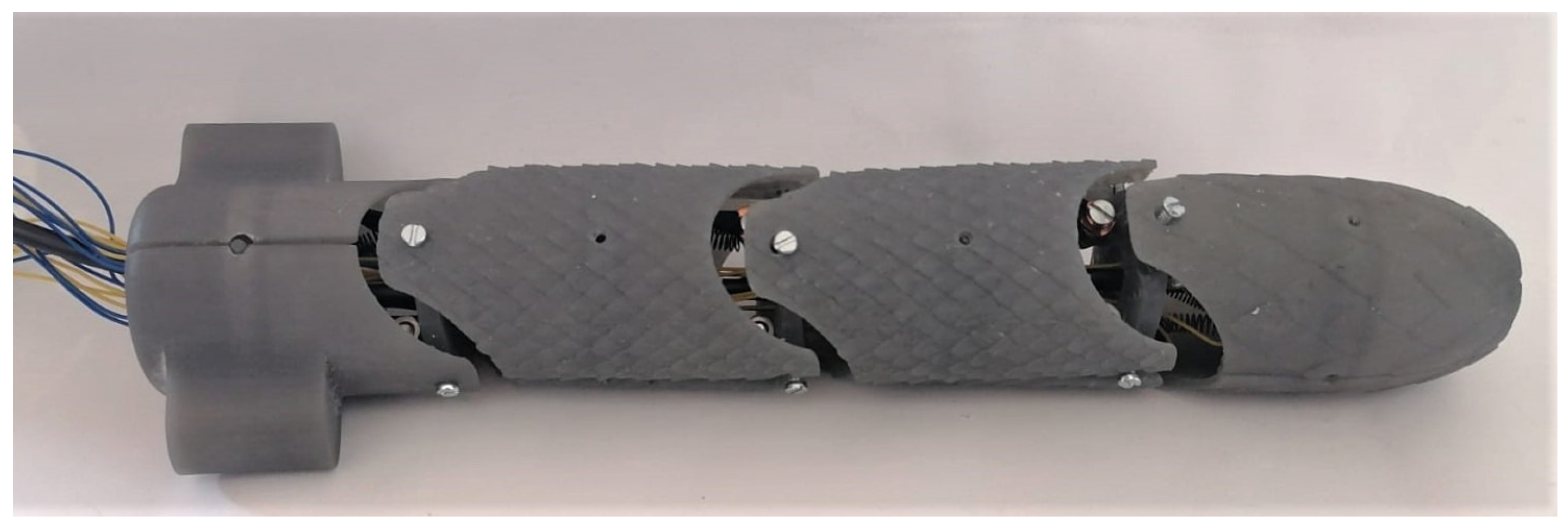
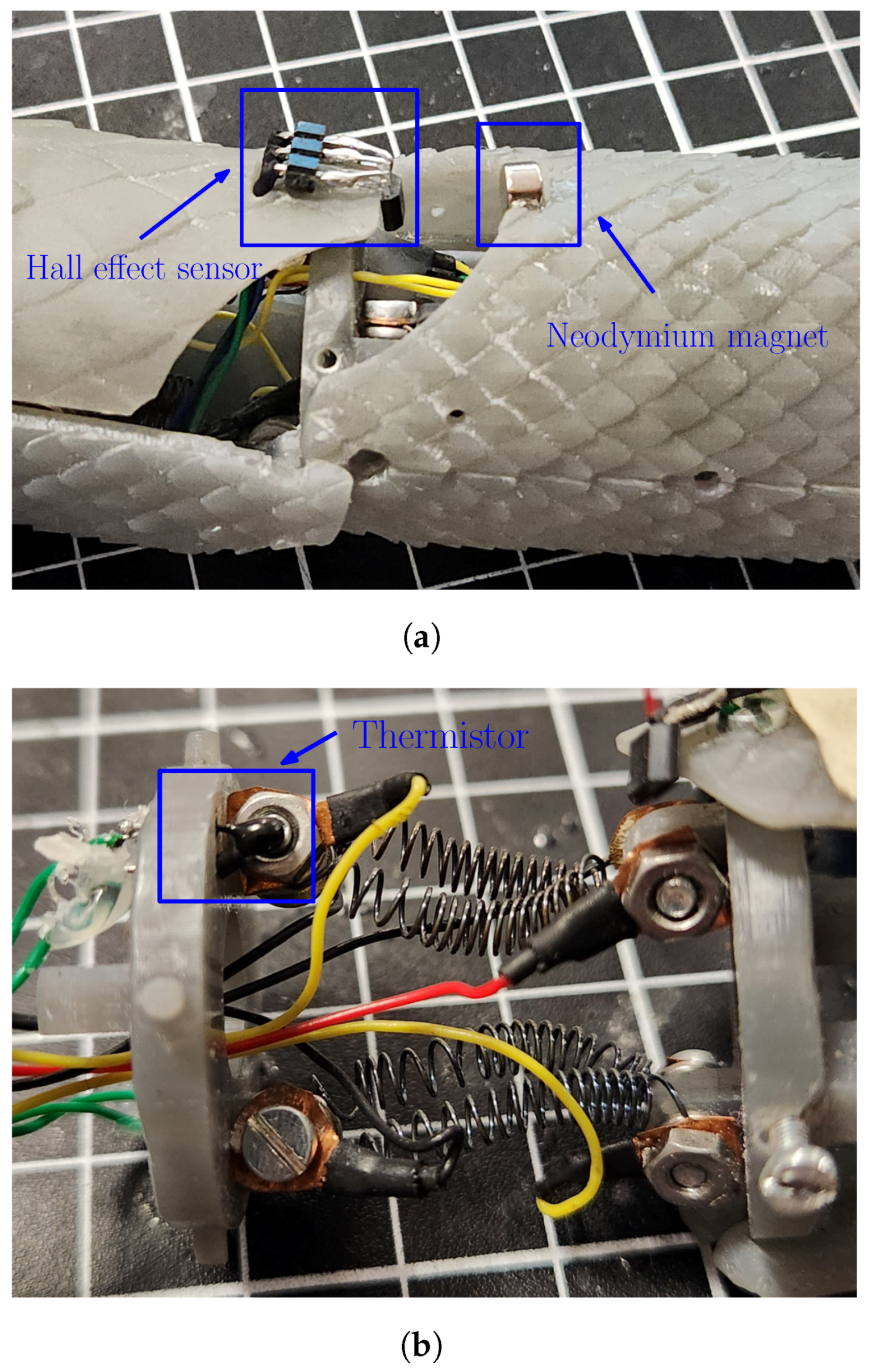
- Snake robot: This generates movements through the use of SMA spring actuators while at the same time retrieving information of their state using temperature sensors and Hall effect sensors to determine the angular position of the joints.
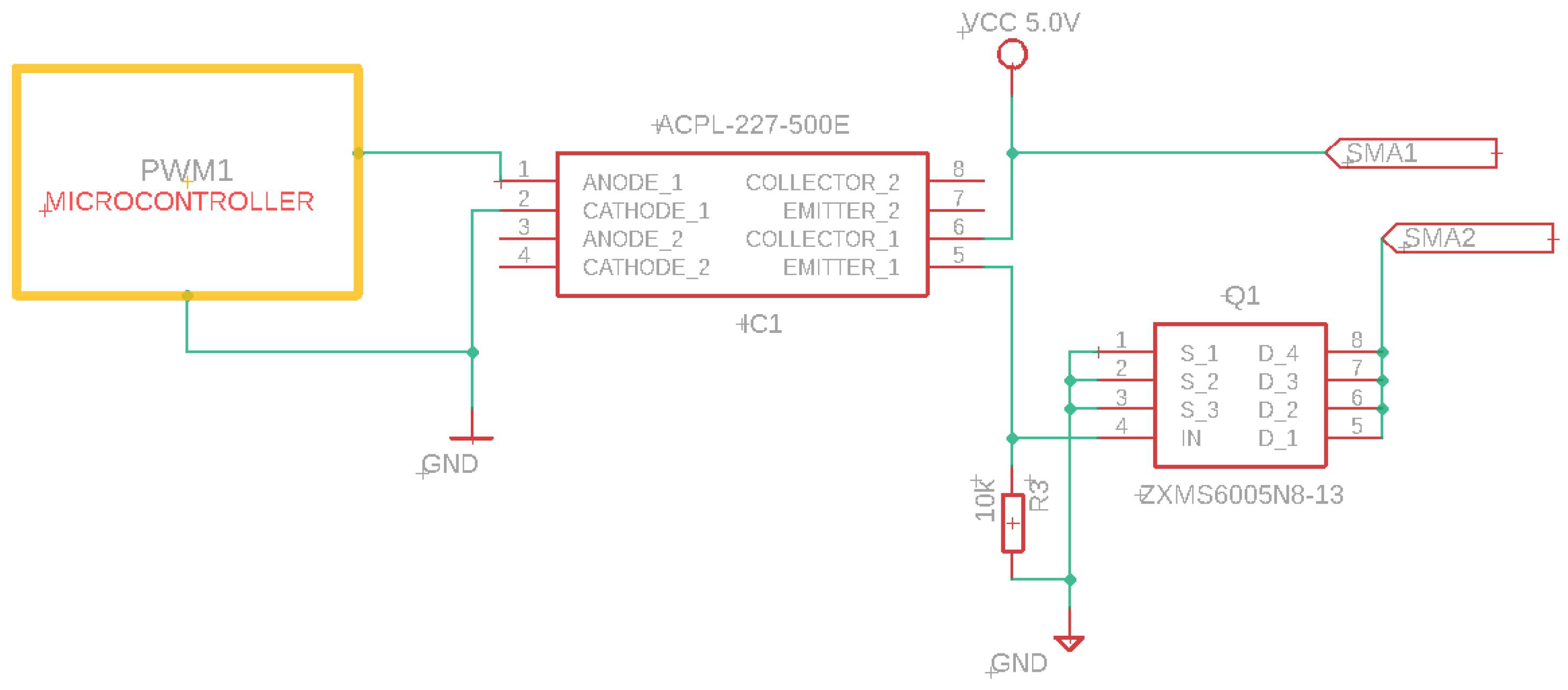
- Power stage: This allows for electronic activation of the SMA actuators via the implementation of PWM signals to regulate the current, which is provided through the use of a MOSFET switching configuration. This stage is optoelectronically isolated in order to avoid any damage produced by malfunctioning.
- Human–robot interface: This consists of two joysticks, one of which provides the user the capability to modify the positions of each joint of the snake robot, while the other allows for the control of the linear actuator mechanism.
- Microcontroller: Facilitates the data acquisition of the sensors and a communication channel with the PC, thereby allowing a graphical interface to generate corresponding computations. At the same time, it receives information from the PC to generate the PWM signals required to control the SMA actuators.
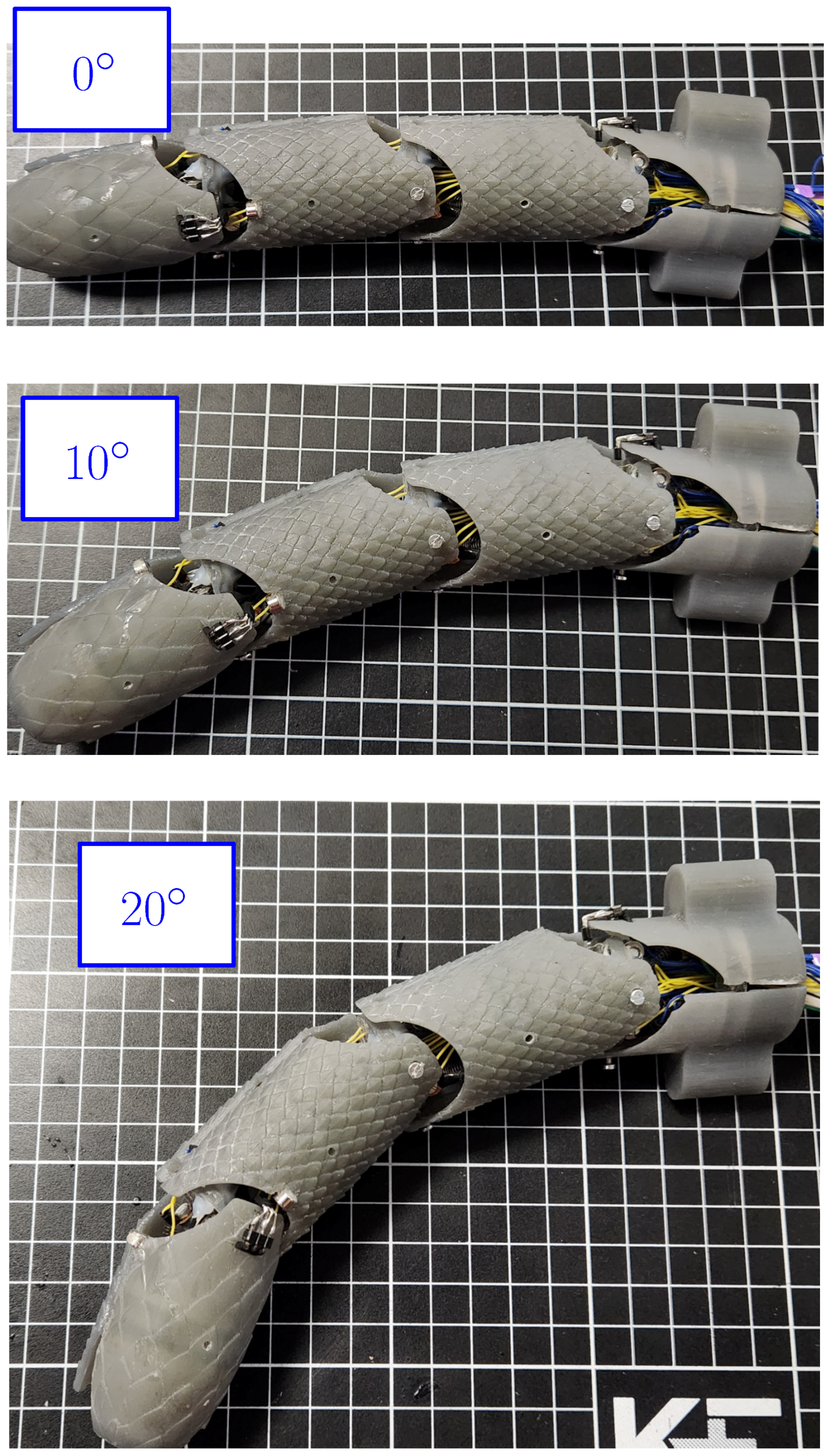
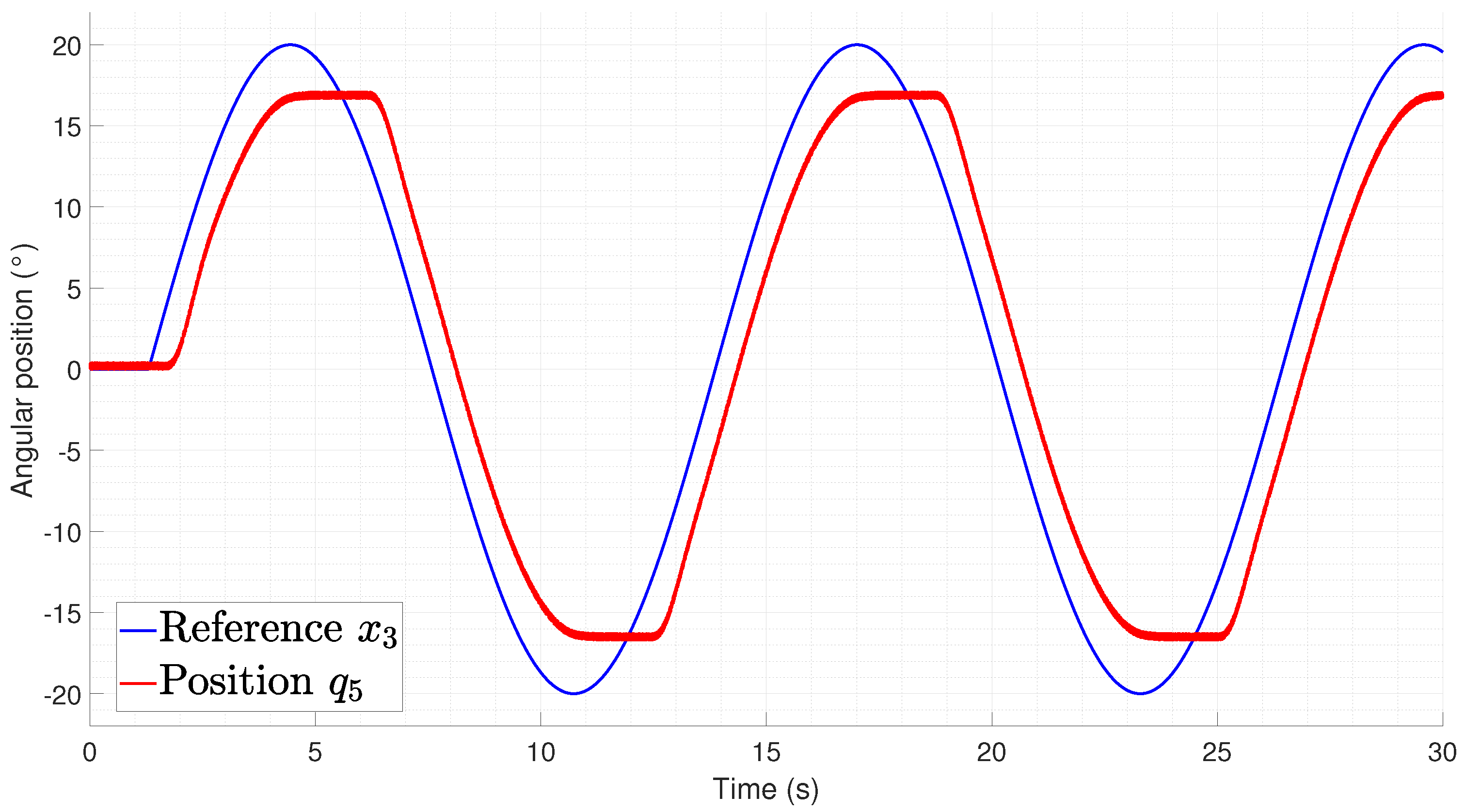
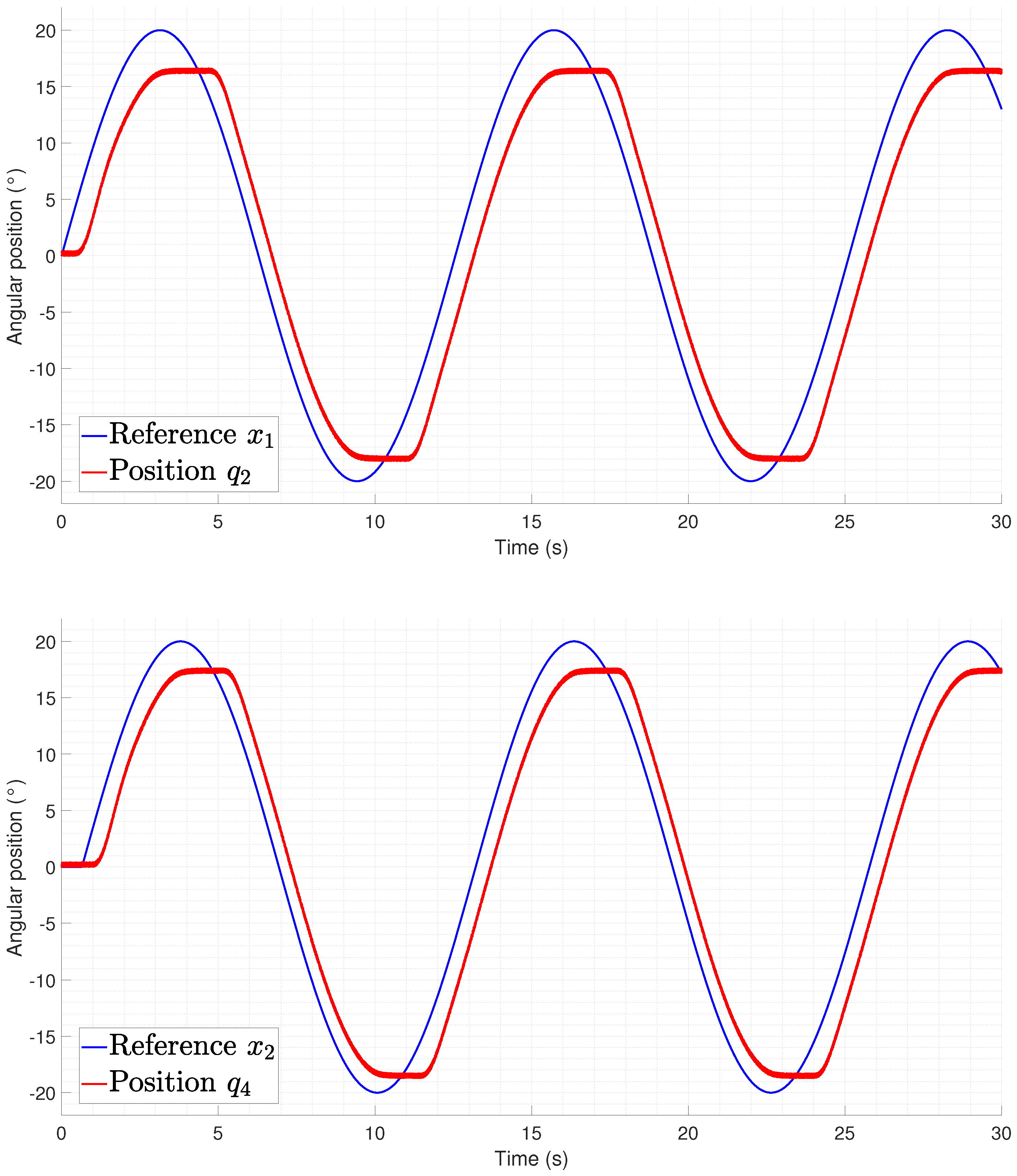
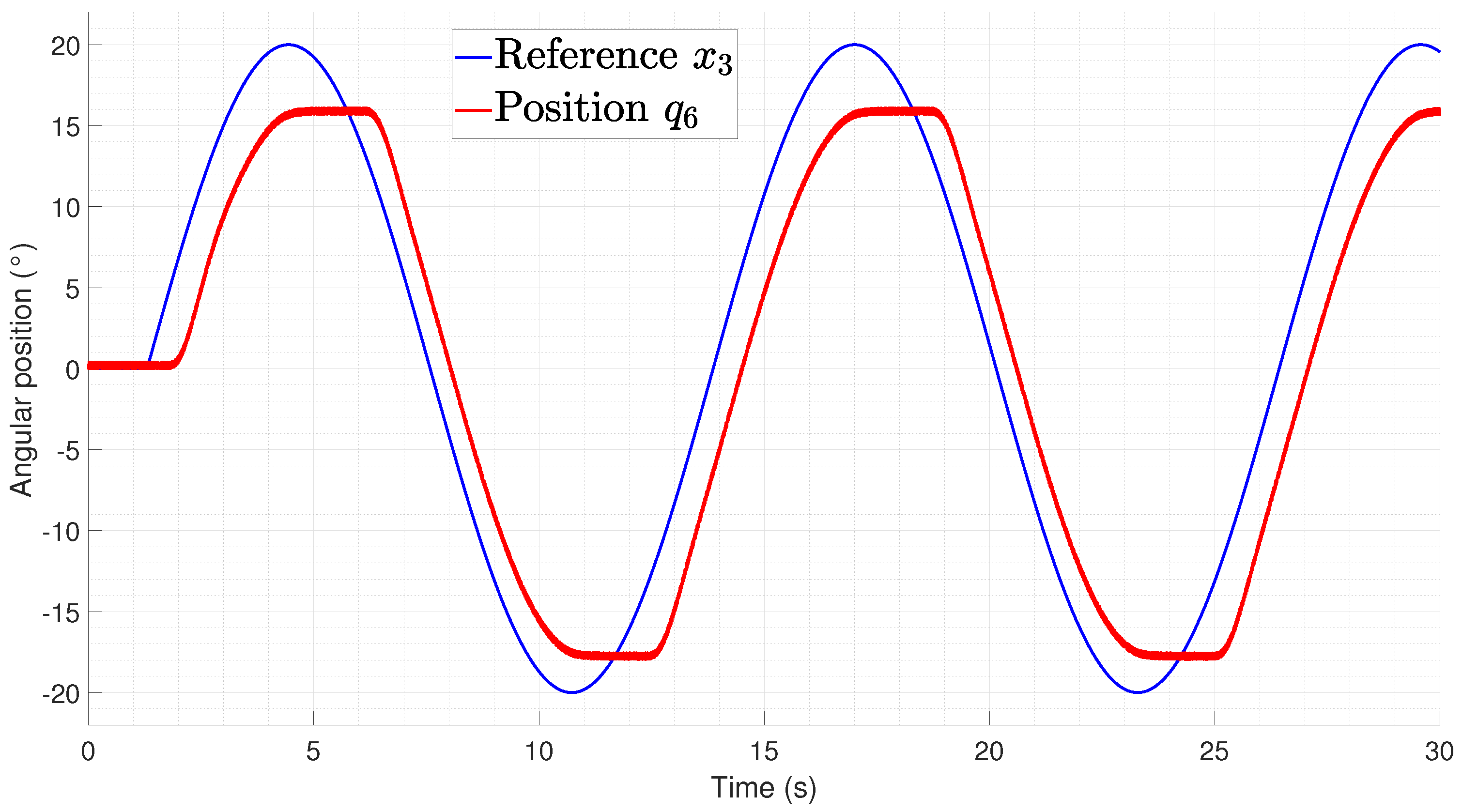
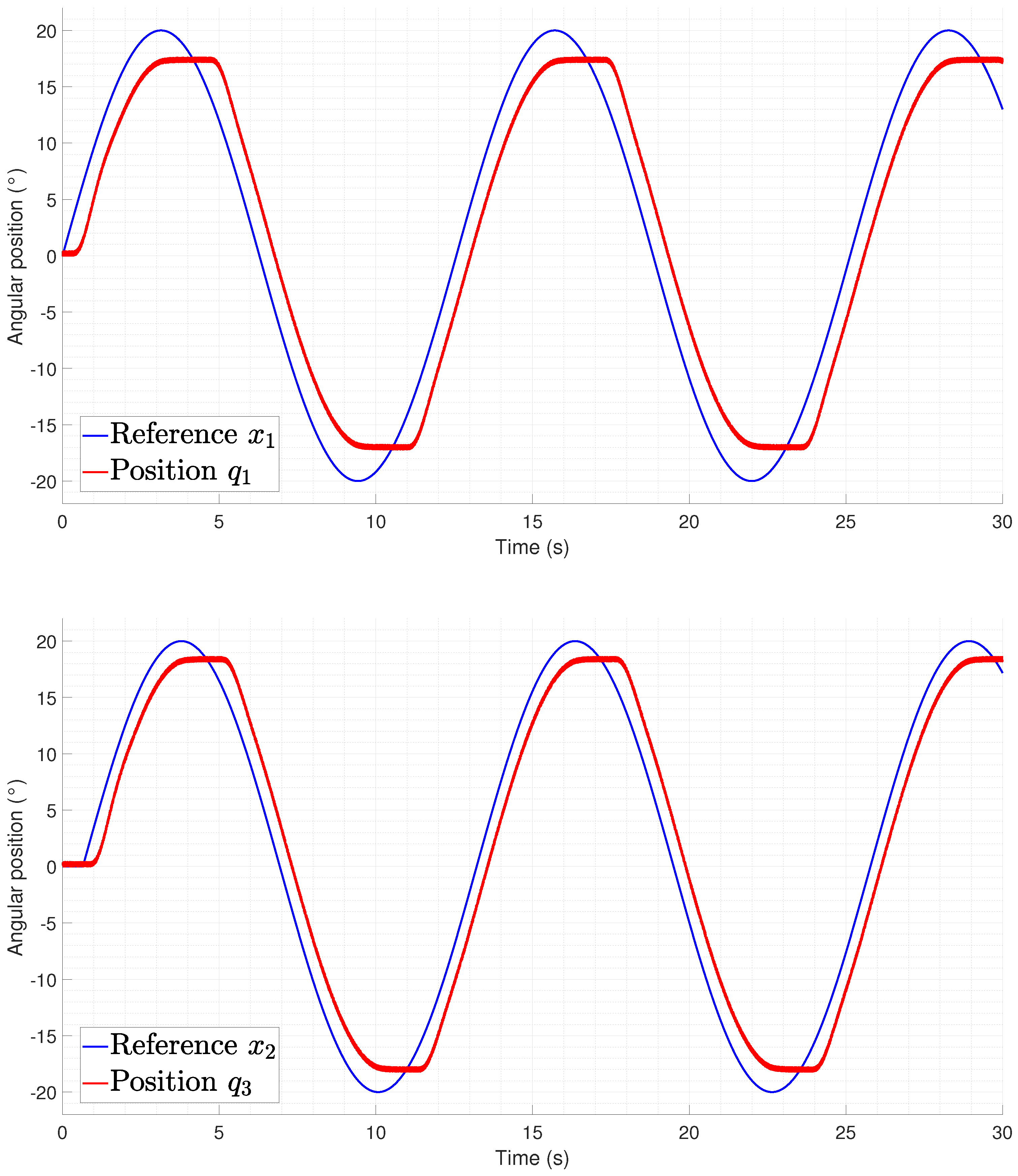
6.2. Angular Motion Test
6.3. Snake Gait Motion Test
7. Conclusions
- The use of SMA spring-shaped actuators is a feasible way to actuate a snake robot that requires a reduced structure without the necessity of implementing a mechanical transmitter system.
- The measurement of the temperature on the SMA actuators is an unavoidable necessity to ensure that they are maintained in the functioning range to avoid damage to the mechanical structure or modifications of their shape programming.
- The estimation of angular positions of the Cardan joint can be performed using an array of two Hall effect sensors in this kind of structure, thus ensuring that the motion of the joints is correctly performed.
- The problem related to the multiple measurements required for the sensing of the temperature and position on the robot can be solved through the implementation of analog multiplexers, thus reducing the number of data acquisition channels required.
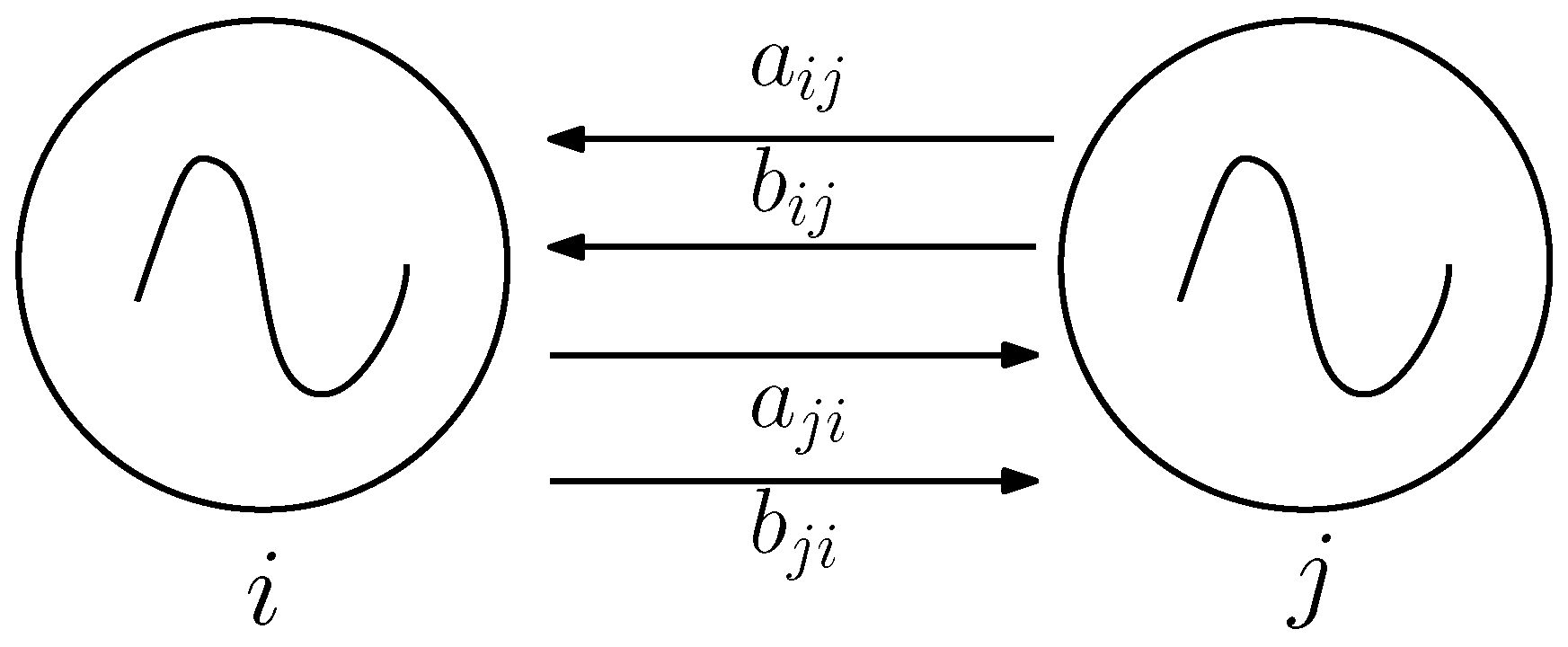
- The signal references required to perform motions such as rectilinear crawling or lateral undulation could be generated through the implementation of a CPG based on synchronized classical oscillators.
- The emulation of the change in snake shape could be performed using a mechanical structure based on Cardan joints; however, this requires increasing the number of links to improve the capacity to generate shapes with sufficient curvature.
- The way in which the Cardan joints are implemented allows for easy access to the SMA actuators, thereby enabling substitution once their degradation reduces the mobility of the robot.
- There exists a drawback related to the response time from the actuators with respect to the tracking of a continuous reference. As such, further research should be conducted to design an approach for compensation of the response speed.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jiang, N.; Chen, C.; He, J.; Meng, J.; Pan, L.; Su, S.; Zhu, X. Bio-robotics research for non-invasive myoelectric neural interfaces for upper-limb prosthetic control: A 10-year perspective review. Natl. Sci. Rev. 2023, 10, nwad048. [Google Scholar] [CrossRef]
- Ren, H. Flexible Robotics in Medicine: A Design Journey of Motion Generation Mechanisms and Biorobotic System Development; Academic Press: Cambridge, MA, USA, 2020. [Google Scholar]
- Li, D.; Pan, Z.; Deng, H.; Peng, T. 2D underwater obstacle avoidance control algorithm based on IB-LBM and APF method for a multi-joint snake-like robot. J. Intell. Robot. Syst. 2020, 98, 771–790. [Google Scholar] [CrossRef]
- Craddock, M.; Augustine, E.; Konerman, S.; Shin, M. Biorobotics: An overview of recent innovations in artificial muscles. Proc. Actuators 2022, 11, 168. [Google Scholar] [CrossRef]
- Liu, J.; Tong, Y.; Liu, J. Review of snake robots in constrained environments. Robot. Auton. Syst. 2021, 141, 103785. [Google Scholar] [CrossRef]
- Li, D.; Zhang, B.; Xiu, Y.; Deng, H.; Zhang, M.; Tong, W.; Law, R.; Zhu, G.; Wu, E.Q.; Zhu, L. Snake robots play an important role in social services and military needs. Innovation 2022, 3, 100333. [Google Scholar] [CrossRef]
- Gautreau, E.; Bonnet, X.; Fox, T.; Fosseries, G.; Valle, V.; Herrel, A.; Laribi, M.A. Complementary methods to acquire the kinematics of swimming snakes: A basis to design bio-inspired robots. J. Bionic Eng. 2023, 20, 668–682. [Google Scholar] [CrossRef]
- Menciassi, A.; Gorini, S.; Pernorio, G.; Dario, P. A SMA actuated artificial earthworm. In Proceedings of the IEEE International Conference on Robotics and Automation, 2004. Proceedings. ICRA’04, New Orleans, LA, USA, 26 April–1 May 2004; Volume 4, pp. 3282–3287. [Google Scholar]
- Menciassi, A.; Accoto, D.; Gorini, S.; Dario, P. Development of a biomimetic miniature robotic crawler. Auton. Robot. 2006, 21, 155–163. [Google Scholar] [CrossRef]
- La Spina, G.; Sfakiotakis, M.; Tsakiris, D.P.; Menciassi, A.; Dario, P. Polychaete-like undulatory robotic locomotion in unstructured substrates. IEEE Trans. Robot. 2007, 23, 1200–1212. [Google Scholar] [CrossRef]
- Duivon, A.; Kirsch, P.; Mauboussin, B.; Mougard, G.; Woszczyk, J.; Sanfilippo, F. The Redesigned Serpens, a Low-Cost, Highly Compliant Snake Robot. Robotics 2022, 11, 42. [Google Scholar] [CrossRef]
- Sanfilippo, F.; Azpiazu, J.; Marafioti, G.; Transeth, A.A.; Stavdahl, Ø.; Liljebäck, P. Perception-driven obstacle-aided locomotion for snake robots: The state of the art, challenges and possibilities. Appl. Sci. 2017, 7, 336. [Google Scholar] [CrossRef]
- Rollinson, D.; Choset, H. Pipe network locomotion with a snake robot. J. Field Robot. 2016, 33, 322–336. [Google Scholar] [CrossRef]
- Trebuňa, F.; Virgala, I.; Pástor, M.; Lipták, T.; Miková, L. An inspection of pipe by snake robot. Int. J. Adv. Robot. Syst. 2016, 13, 1729881416663668. [Google Scholar] [CrossRef]
- Fjerdingen, S.A.; Liljebäck, P.; Transeth, A.A. A snake-like robot for internal inspection of complex pipe structures (PIKo). In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 5665–5671. [Google Scholar]
- Virgala, I.; Kelemen, M.; Prada, E.; Sukop, M.; Kot, T.; Bobovskỳ, Z.; Varga, M.; Ferenčík, P. A snake robot for locomotion in a pipe using trapezium-like travelling wave. Mech. Mach. Theory 2021, 158, 104221. [Google Scholar] [CrossRef]
- Han, S.; Chon, S.; Kim, J.; Seo, J.; Shin, D.G.; Park, S.; Kim, J.T.; Kim, J.; Jin, M.; Cho, J. Snake robot gripper module for search and rescue in narrow spaces. IEEE Robot. Autom. Lett. 2022, 7, 1667–1673. [Google Scholar] [CrossRef]
- Erkmen, I.; Erkmen, A.M.; Matsuno, F.; Chatterjee, R.; Kamegawa, T. Snake robots to the rescue! IEEE Robot. Autom. Mag. 2002, 9, 17–25. [Google Scholar] [CrossRef]
- Chavan, P.; Murugan, M.; Unnikkannan, E.V.; Singh, A.; Phadatare, P. Modular snake robot with mapping and navigation: Urban search and rescue (USAR) robot. In Proceedings of the 2015 International Conference on Computing Communication Control and Automation, Pune, India, 26–27 February 2015; pp. 537–541. [Google Scholar]
- Sanfilippo, F.; Stavdahl, Ø.; Liljebäck, P. SnakeSIM: A ROS-based control and simulation framework for perception-driven obstacle-aided locomotion of snake robots. Artif. Life Robot. 2018, 23, 449–458. [Google Scholar] [CrossRef]
- Bing, Z.; Lemke, C.; Morin, F.O.; Jiang, Z.; Cheng, L.; Huang, K.; Knoll, A. Perception-action coupling target tracking control for a snake robot via reinforcement learning. Front. Neurorobot. 2020, 14, 591128. [Google Scholar] [CrossRef]
- Yang, W.; Wang, G.; Shen, Y. Perception-aware path finding and following of snake robot in unknown environment. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 5925–5930. [Google Scholar]
- Liu, W.; Menciassi, A.; Scapellato, S.; Dario, P.; Chen, Y. A biomimetic sensor for a crawling minirobot. Robot. Auton. Syst. 2006, 54, 513–528. [Google Scholar] [CrossRef]
- Kwok, K.W.; Tsoi, K.H.; Vitiello, V.; Clark, J.; Chow, G.C.; Luk, W.; Yang, G.Z. Dimensionality reduction in controlling articulated snake robot for endoscopy under dynamic active constraints. IEEE Trans. Robot. 2012, 29, 15–31. [Google Scholar] [CrossRef]
- Berthet-Rayne, P.; Gras, G.; Leibrandt, K.; Wisanuvej, P.; Schmitz, A.; Seneci, C.A.; Yang, G.Z. The i 2 snake robotic platform for endoscopic surgery. Ann. Biomed. Eng. 2018, 46, 1663–1675. [Google Scholar] [CrossRef]
- Wong, J.Y.; Ho, K.Y. Robotics for advanced therapeutic colonoscopy. Clin. Endosc. 2018, 51, 552–557. [Google Scholar] [CrossRef]
- Orekhov, A.; Abah, C.; Simaan, N. Snake-like robots for minimally invasive, single-port, and intraluminal surgeries. Encycl. Med. Robot. 2018, 1, 203–243. [Google Scholar]
- Seetohul, J.; Shafiee, M. Snake robots for surgical applications: A review. Robotics 2022, 11, 57. [Google Scholar] [CrossRef]
- Tortora, G.; Dario, P.; Menciassi, A. Array of robots augmenting the kinematics of endocavitary surgery. IEEE/ASME Trans. Mechatron. 2014, 19, 1821–1829. [Google Scholar] [CrossRef]
- Lafmejani, A.S.; Doroudchi, A.; Farivarnejad, H.; He, X.; Aukes, D.; Peet, M.M.; Marvi, H.; Fisher, R.E.; Berman, S. Kinematic modeling and trajectory tracking control of an octopus-inspired hyper-redundant robot. IEEE Robot. Autom. Lett. 2020, 5, 3460–3467. [Google Scholar] [CrossRef]
- Du, Z.; Fang, H.; Xu, J. Snake-worm: A Bi-modal locomotion robot. J. Bionic Eng. 2022, 19, 1272–1287. [Google Scholar] [CrossRef]
- Li, W.; Shen, M.; Gao, A.; Yang, G.Z.; Lo, B. Towards a snake-like flexible robot for endoscopic submucosal dissection. IEEE Trans. Med. Robot. Bionics 2020, 3, 257–260. [Google Scholar] [CrossRef]
- Lee, H.; Kim, K.G.; Seo, J.H.; Sohn, D.K. Natural orifice transluminal endoscopic surgery with a snake-mechanism using a movable pulley. Int. J. Med. Robot. Comput. Assist. Surg. 2017, 13, e1816. [Google Scholar] [CrossRef]
- Racioppo, P.; Ben-Tzvi, P. Design and control of a cable-driven articulated modular snake robot. IEEE/ASME Trans. Mechatron. 2019, 24, 893–901. [Google Scholar] [CrossRef]
- Gautreau, E.; Bonnet, X.; Sandoval, J.; Fosseries, G.; Herrel, A.; Arsicault, M.; Zeghloul, S.; Laribi, M.A. A biomimetic method to replicate the natural fluid movements of swimming snakes to design aquatic robots. Biomimetics 2022, 7, 223. [Google Scholar] [CrossRef]
- Seeja, G.; Doss, A.S.A.; Hency, V.B. A Survey on Snake Robot Locomotion. IEEE Access 2022, 10, 112100–112116. [Google Scholar] [CrossRef]
- Gautreau, E.; Sandoval, J.; Bonnet, X.; Arsicault, M.; Zeghloul, S.; Laribi, M. A new bio-inspired Hybrid Cable-Driven Robot (HCDR) to design more realistic snakebots. In Proceedings of the 2022 International Conference on Robotics and Automation (ICRA), Philadelphia, PA, USA, 23–27 May 2022; pp. 2134–2140. [Google Scholar]
- Qi, X.; Shi, H.; Pinto, T.; Tan, X. A novel pneumatic soft snake robot using traveling-wave locomotion in constrained environments. IEEE Robot. Autom. Lett. 2020, 5, 1610–1617. [Google Scholar] [CrossRef]
- Liao, B.; Zang, H.; Chen, M.; Wang, Y.; Lang, X.; Zhu, N.; Yang, Z.; Yi, Y. Soft rod-climbing robot inspired by winding locomotion of snake. Soft Robot. 2020, 7, 500–511. [Google Scholar] [CrossRef]
- Lopez, M.; Haghshenas-Jaryani, M. A Muscle-Driven Mechanism for Locomotion of Snake-Robots. Automation 2021, 3, 1–26. [Google Scholar] [CrossRef]
- Kakogawa, A.; Kawabata, T.; Ma, S. Plate-springed parallel elastic actuator for efficient snake robot movement. IEEE/ASME Trans. Mechatron. 2021, 26, 3051–3063. [Google Scholar] [CrossRef]
- Stuttaford-Fowler, A.; Samani, H.; Yang, C.Y. Biomimicry in soft robotics actuation and locomotion. In Proceedings of the 2022 International Conference on System Science and Engineering (ICSSE), Taichung, Taiwan, 26–29 May 2022; pp. 017–021. [Google Scholar]
- Cortez-Vega, R.; Chairez, I.; Luviano-Juarez, A.; Lozada-Castillo, N.; Feliu-Batlle, V. Multi-link endoscopic manipulator robot actuated by shape memory alloys spring actuators controlled by a sliding mode. ISA Trans. 2020, in press. [Google Scholar] [CrossRef]
- Salerno, M.; Zhang, K.; Menciassi, A.; Dai, J.S. A novel 4-DOF origami grasper with an SMA-actuation system for minimally invasive surgery. IEEE Trans. Robot. 2016, 32, 484–498. [Google Scholar] [CrossRef]
- Azizkhani, M.; Godage, I.S.; Chen, Y. Dynamic control of soft robotic arm: A simulation study. IEEE Robot. Autom. Lett. 2022, 7, 3584–3591. [Google Scholar] [CrossRef]
- Lu, Y.; Xie, Z.; Wang, J.; Yue, H.; Wu, M.; Liu, Y. A novel design of a parallel gripper actuated by a large-stroke shape memory alloy actuator. Int. J. Mech. Sci. 2019, 159, 74–80. [Google Scholar] [CrossRef]
- Ciuti, G.; Caliò, R.; Camboni, D.; Neri, L.; Bianchi, F.; Arezzo, A.; Koulaouzidis, A.; Schostek, S.; Stoyanov, D.; Oddo, C.M.; et al. Frontiers of robotic endoscopic capsules: A review. J. Micro-Bio Robot. 2016, 11, 1–18. [Google Scholar] [CrossRef]
- Ricotti, L.; Trimmer, B.; Feinberg, A.W.; Raman, R.; Parker, K.K.; Bashir, R.; Sitti, M.; Martel, S.; Dario, P.; Menciassi, A. Biohybrid actuators for robotics: A review of devices actuated by living cells. Sci. Robot. 2017, 2, eaaq0495. [Google Scholar] [CrossRef]
- Cianchetti, M.; Laschi, C.; Menciassi, A.; Dario, P. Biomedical applications of soft robotics. Nat. Rev. Mater. 2018, 3, 143–153. [Google Scholar] [CrossRef]
- Stroud, H.; Hartl, D. Shape memory alloy torsional actuators: A review of applications, experimental investigations, modeling, and design. Smart Mater. Struct. 2020, 29, 113001. [Google Scholar] [CrossRef]
- Ades, C.J.; Dilibal, S.; Engeberg, E.D. Shape memory alloy tube actuators inherently enable internal fluidic cooling for a robotic finger under force control. Smart Mater. Struct. 2020, 29, 115009. [Google Scholar] [CrossRef]
- Santosh, S.; Harris, W.J.; Srivatsan, T. Environment-Induced Degradation of shape Memory alloys: Role of alloying and nature of environment. Materials 2023, 16, 5660. [Google Scholar] [CrossRef]
- Song, D.; Yu, C.; Zhang, C.; Kang, G. Superelasticity degradation of NiTi shape memory alloy in wide ranges of temperature and loading level: Experimental observation and micromechanical constitutive model. Int. J. Plast. 2023, 161, 103487. [Google Scholar] [CrossRef]
- Cortez-Vega, R.; Chairez, I.; Luviano-Juárez, A.; Feliu-Batlle, V. A hybrid dynamic model of shape memory alloy spring actuators. Measurement 2018, 114, 340–353. [Google Scholar] [CrossRef]
- Marziale, L.; Lucarini, G.; Mazzocchi, T.; Gruppioni, E.; Castellano, S.; Davalli, A.; Sacchetti, R.; Pistolesi, D.; Ricotti, L.; Menciassi, A. Artificial sphincters to manage urinary incontinence: A review. Artif. Organs 2018, 42, E215–E233. [Google Scholar] [CrossRef]
- Kumari, S.; Abhishek, K. Study of machinability aspects of shape memory alloys: A critical review. Mater. Today Proc. 2021, 44, 1336–1343. [Google Scholar] [CrossRef]
- Wu, D.; Ha, X.T.; Zhang, Y.; Ourak, M.; Borghesan, G.; Niu, K.; Trauzettel, F.; Dankelman, J.; Menciassi, A.; Vander Poorten, E. Deep-learning-based compliant motion control of a pneumatically-driven robotic catheter. IEEE Robot. Autom. Lett. 2022, 7, 8853–8860. [Google Scholar] [CrossRef]
- Shukla, U.; Garg, K. Journey of smart material from composite to shape memory alloy (SMA), characterization and their applications-A review. Smart Mater. Med. 2023, 4, 227–242. [Google Scholar] [CrossRef]
- Otsuka, K.; Wayman, C.M. Shape Memory Materials; Cambridge University Press: Cambridge, UK, 1999. [Google Scholar]
- Cortez Vega, R.; Cubas, G.; Sandoval-Chileño, M.A.; Castañeda Briones, L.Á.; Lozada-Castillo, N.B.; Luviano-Juárez, A. Position Measurements Using Magnetic Sensors for a Shape Memory Alloy Linear Actuator. Sensors 2022, 22, 7460. [Google Scholar] [CrossRef]
- Ebrahimi-Darkhaneh, H. Measurement error caused by self-heating in NTC and PTC thermistors. Tex. Instrum. Analog. Des. J. Q 2019, 3, 001–007. [Google Scholar]
- Hoge, H.J. Comparison of circuits for linearizing the temperature indications of thermistors. Rev. Sci. Instrum. 1979, 50, 316–320. [Google Scholar] [CrossRef]
- Evangeliou, N.; Tzes, A. Development of an sma-actuated redundant robotic platform for minimally invasive surgery. In Proceedings of the 2016 6th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob), Singapore, 26–29 June 2016; pp. 353–358. [Google Scholar]
- Paez-Pidiache, I.Y.; Luviano-Juárez, A.; Lozada-Castillo, N.; Castillo-Castañeda, E.; Reyes-Torres, H. Design, characterization and construction of an actuator based on shape memory alloys. MRS Adv. 2021, 6, 907–912. [Google Scholar] [CrossRef]
- Liljebäck, P.; Pettersen, K.Y.; Stavdahl, Ø.; Gravdahl, J.T. Snake Robots: Modelling, Mechatronics, and Control; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Yu, H.; Gao, H.; Deng, Z. Enhancing adaptability with local reactive behaviors for hexapod walking robot via sensory feedback integrated central pattern generator. Robot. Auton. Syst. 2020, 124, 103401. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property | Value | Units |
|---|---|---|
| Resistance | 8.3 | [Ω/m] |
| Density | 6.45 | [g/cm3] |
| Specific heat coefficient | 0.2 | [cal/°·g] |
| Convection heat coefficient | 0.18 | [W/°·g] |
| i | ||||
|---|---|---|---|---|
| 1 | 0 | 0 | ||
| 2 | l | 0 | ||
| 3 | 0 | 0 | ||
| 4 | l | 0 | ||
| 5 | 0 | 0 | ||
| 6 | l | 0 |
| Motion | Joint | |
|---|---|---|
| Lateral undulation | 1 | |
| Lateral undulation | 3 | |
| Lateral undulation | 5 | |
| Rectilinear crawling | 2 | |
| Rectilinear crawling | 4 | |
| Rectilinear crawling | 6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cortez, R.; Sandoval-Chileño, M.A.; Lozada-Castillo, N.; Luviano-Juárez, A. Snake Robot with Motion Based on Shape Memory Alloy Spring-Shaped Actuators. Biomimetics 2024, 9, 180. https://doi.org/10.3390/biomimetics9030180
Cortez R, Sandoval-Chileño MA, Lozada-Castillo N, Luviano-Juárez A. Snake Robot with Motion Based on Shape Memory Alloy Spring-Shaped Actuators. Biomimetics. 2024; 9(3):180. https://doi.org/10.3390/biomimetics9030180
Chicago/Turabian StyleCortez, Ricardo, Marco Antonio Sandoval-Chileño, Norma Lozada-Castillo, and Alberto Luviano-Juárez. 2024. "Snake Robot with Motion Based on Shape Memory Alloy Spring-Shaped Actuators" Biomimetics 9, no. 3: 180. https://doi.org/10.3390/biomimetics9030180
APA StyleCortez, R., Sandoval-Chileño, M. A., Lozada-Castillo, N., & Luviano-Juárez, A. (2024). Snake Robot with Motion Based on Shape Memory Alloy Spring-Shaped Actuators. Biomimetics, 9(3), 180. https://doi.org/10.3390/biomimetics9030180