

An Improved Harris Hawks Optimization Algorithm and Its Application in Grid Map Path Planning

Abstract
:1. Introduction
2. Description of the Mathematical Problem
2.1. Path Length
2.2. Mathematical Model
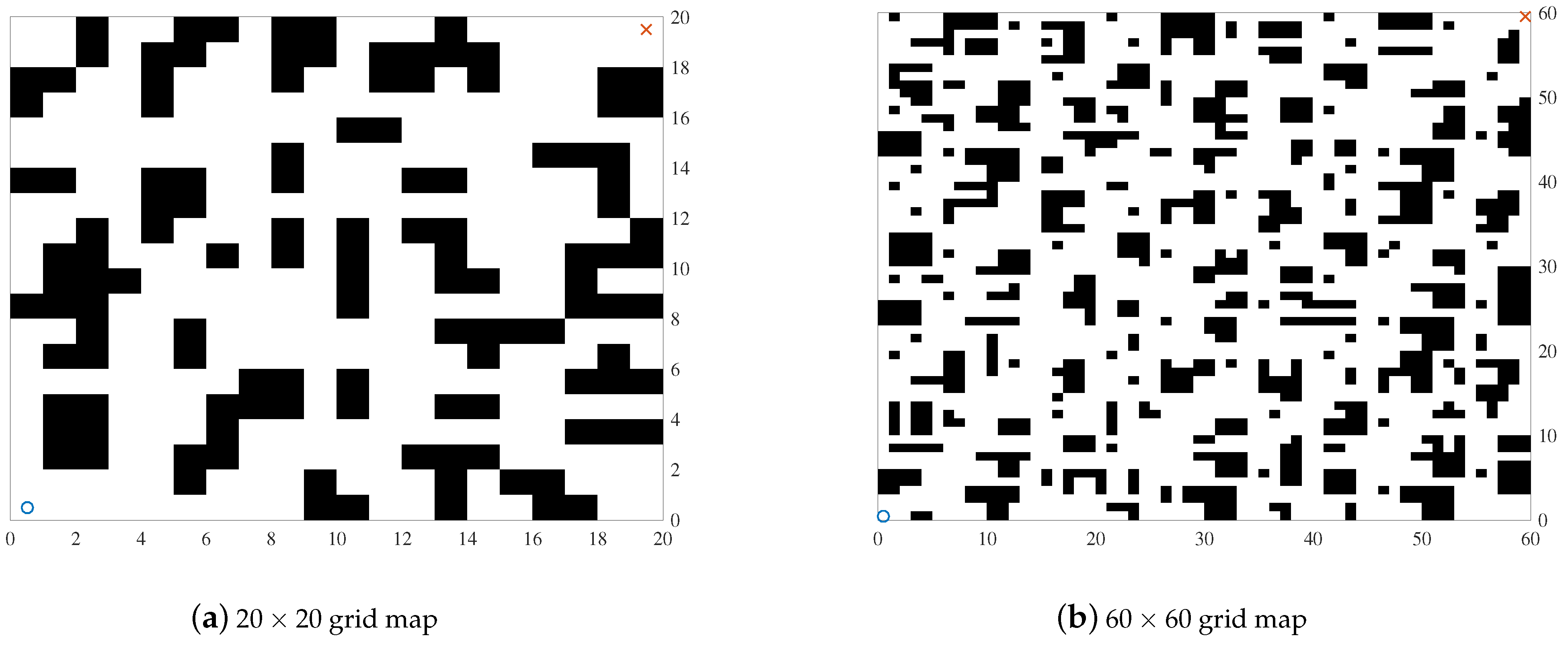
2.3. Grid Modeling
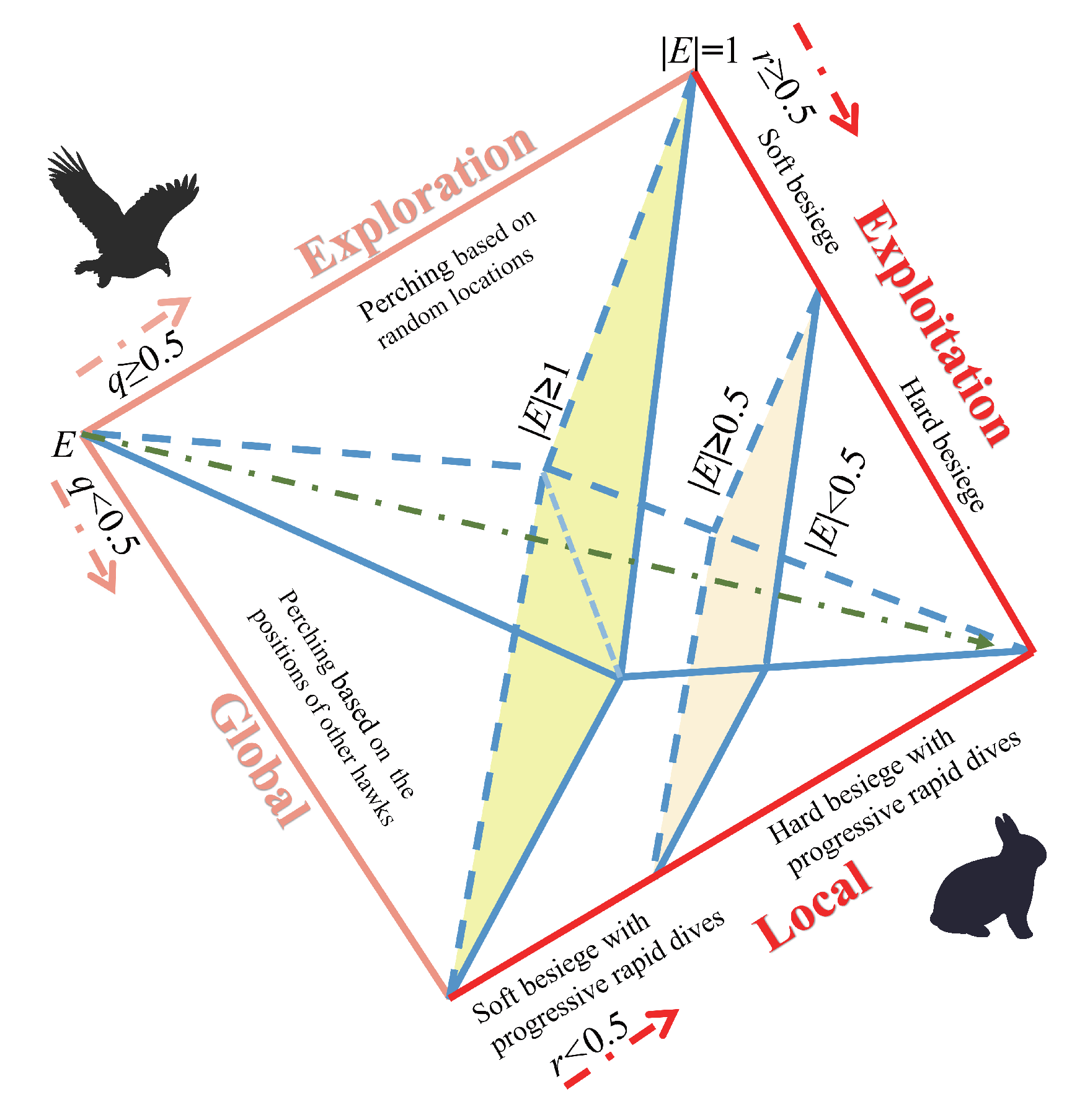
3. Standard Harris Hawks Optimization (HHO) Algorithm
3.1. Exploration Phase
3.2. Exploitation Phase
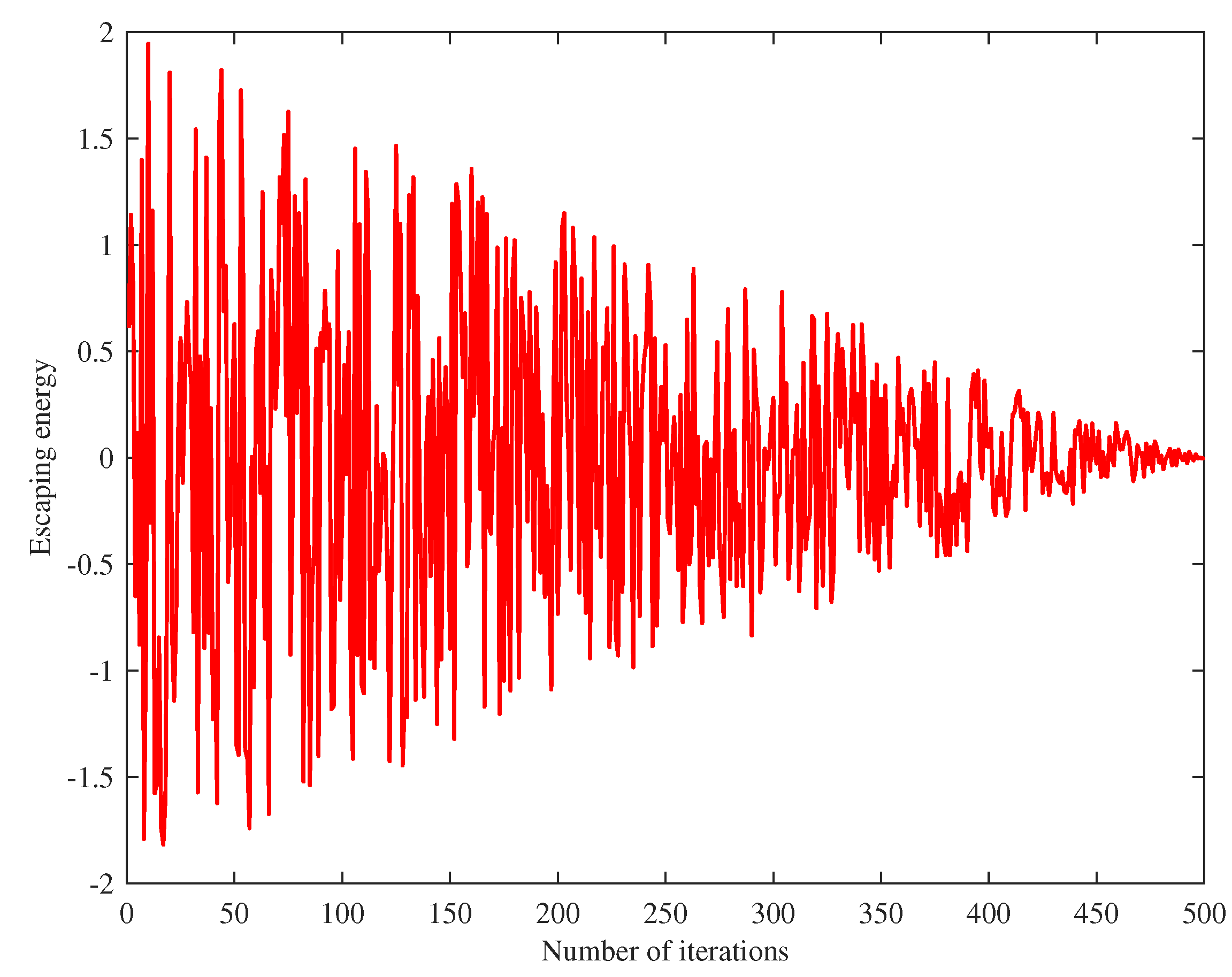
3.3. Escaping Energy
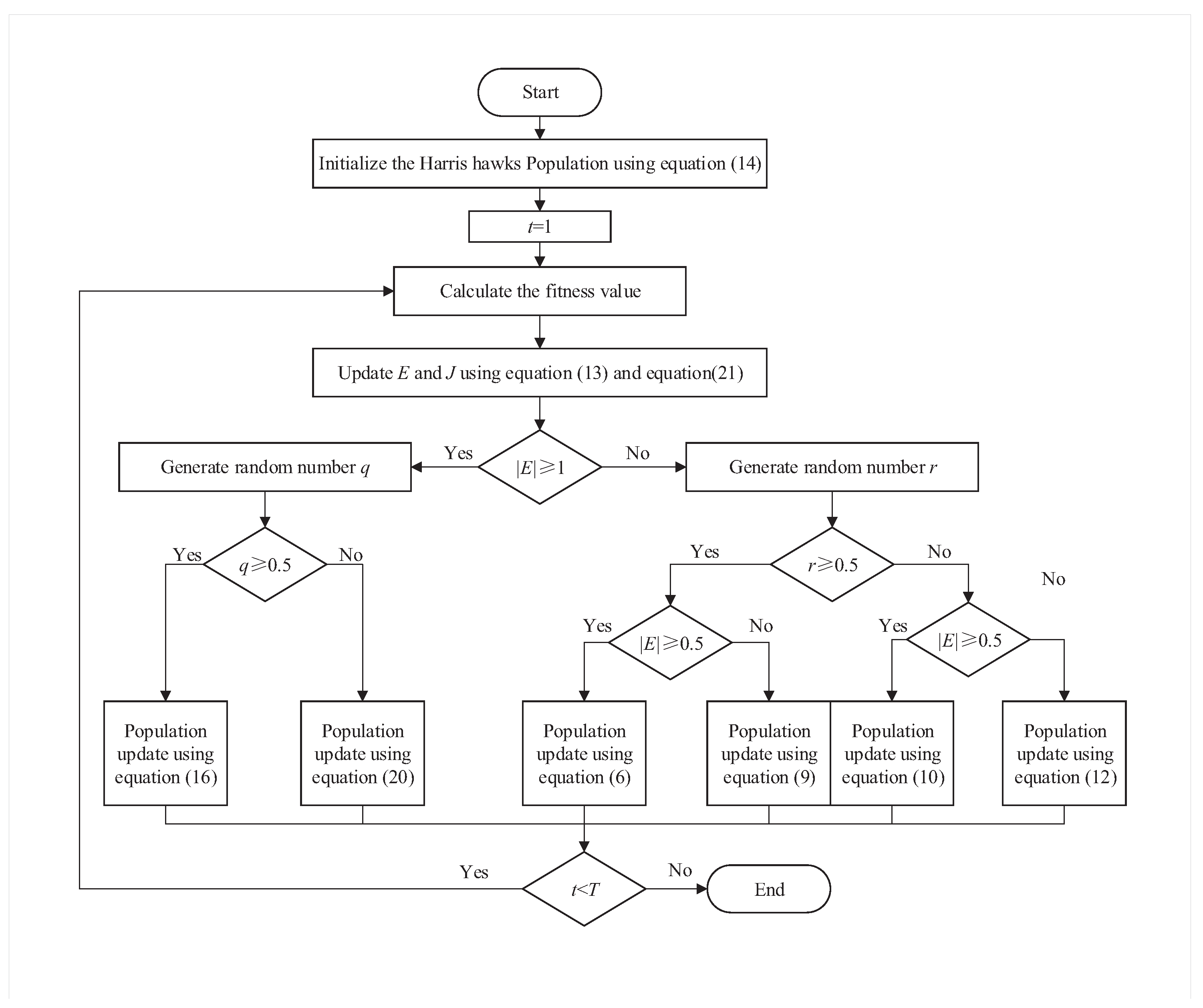
4. Improved Harris Hawks Optimization (IHHO) Algorithm
- 1.
- Using the circle map to initialize the population to reduce the number of initialization points on the boundary.
- 2.
- Introducing the random guidance strategy and improvement sine-trend search strategy to replace Formula (4), which increases the information exchange between populations, improves diversity, and reduces the step size and premature convergence to some extent, thus increasing the efficiency of the global search of the hawks. The improved sine-trend search strategy reduces the dependence of the population on the average position and guides the individual hawks to approach the prey, thus improving the convergence in the exploration stage.
- 3.
- Proposing the nonlinear jump strength convergence strategy, which combines the random jump strength with the prey’s escape energy to increase the convergence accuracy during a local search.
4.1. Circle Map
4.2. Random Guidance Strategy
4.3. Improved Sine-Trend Search
4.4. Nonlinear Jump Strength
4.5. Computational Complexity
4.5.1. Time Complexity Analysis
4.5.2. Performing Step Time Complexity Analysis
- Step 1: During the initial population calculation, the numbers need to be computed, with a computation complexity of .
- Step 2: The fitness value of the individuals in the population needs to be evaluated once, with a computation complexity of .
- Step 3: The escape energy needs to be calculated once, with a computation complexity of .
- Step 4: If the progressive encirclement approach is used, the position needs to be updated twice; otherwise, it only needs to be updated once, resulting in a computation complexity of . If the progressive encirclement approach is used then ; otherwise, .
- Step 5: The fitness value and the overall optimal value need to be updated twice, with a computation complexity of .
- The overall execution time complexity is .
| Algorithm 1 Pseudo-code of IHHO algorithm. |
| Input: The population size and maximum Output: The location of rabbit and its fitness value
|
5. Algorithm Simulation Experiment and Analysis
5.1. Out-of-Bounds Comparison
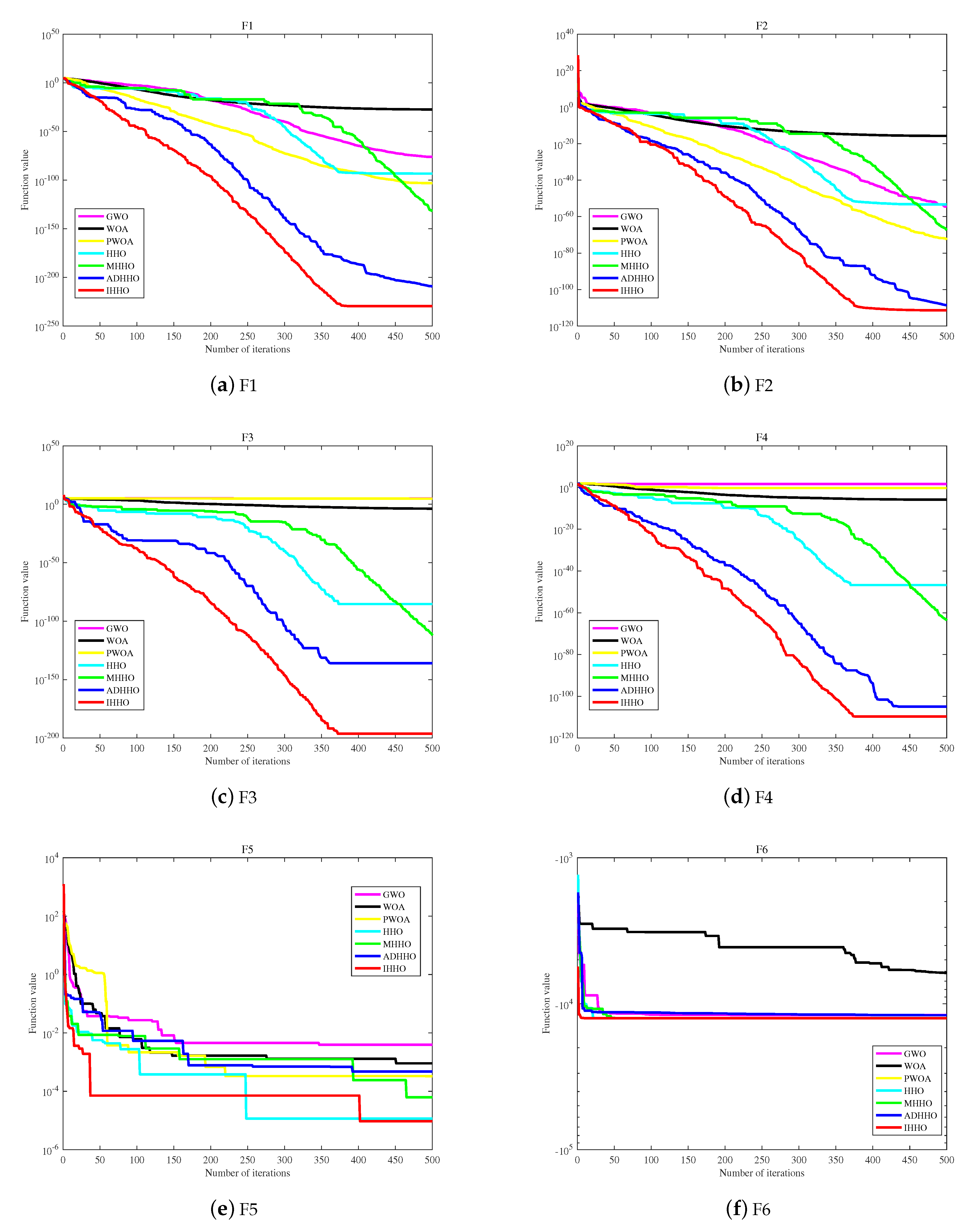
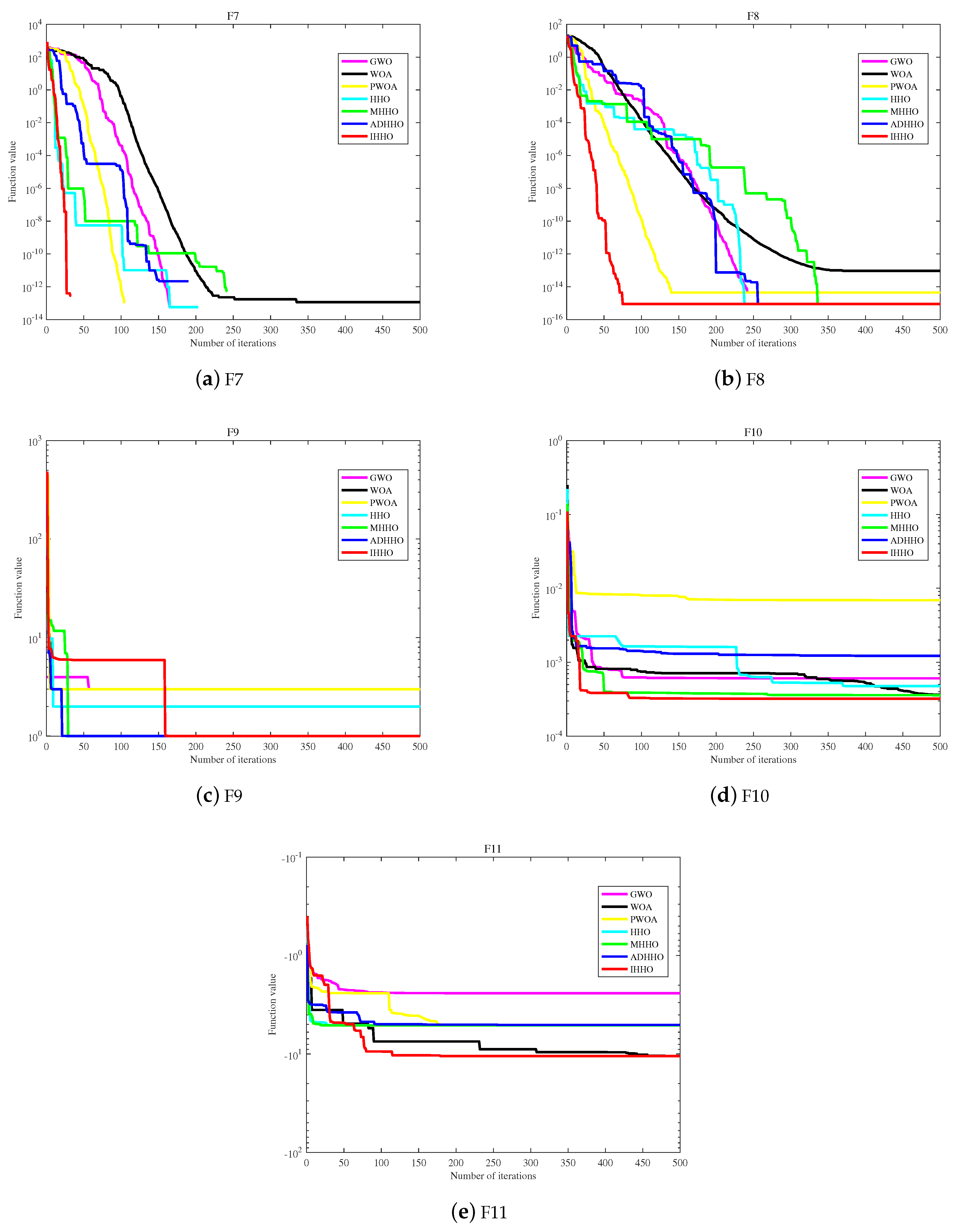
5.2. Test Function
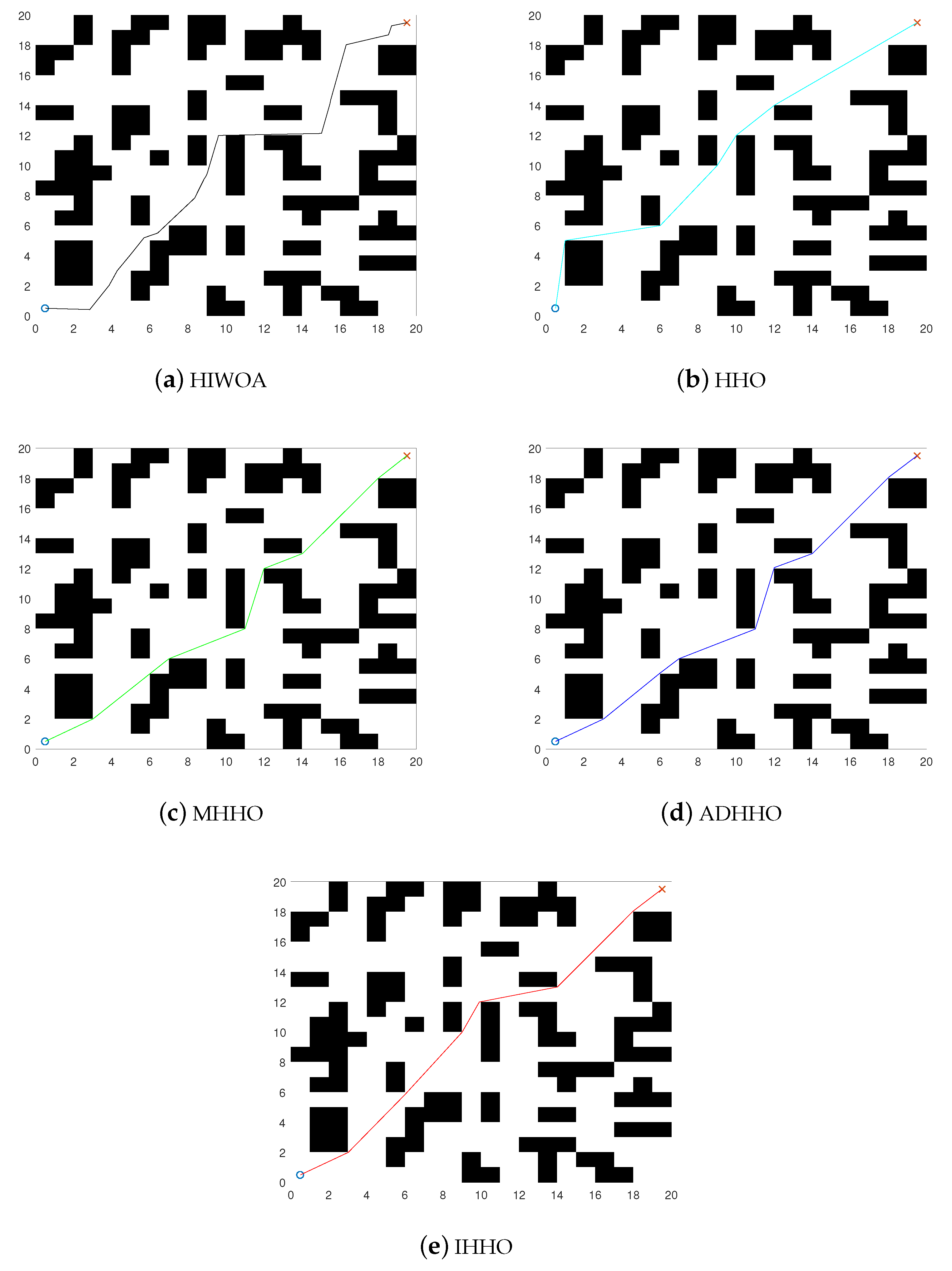
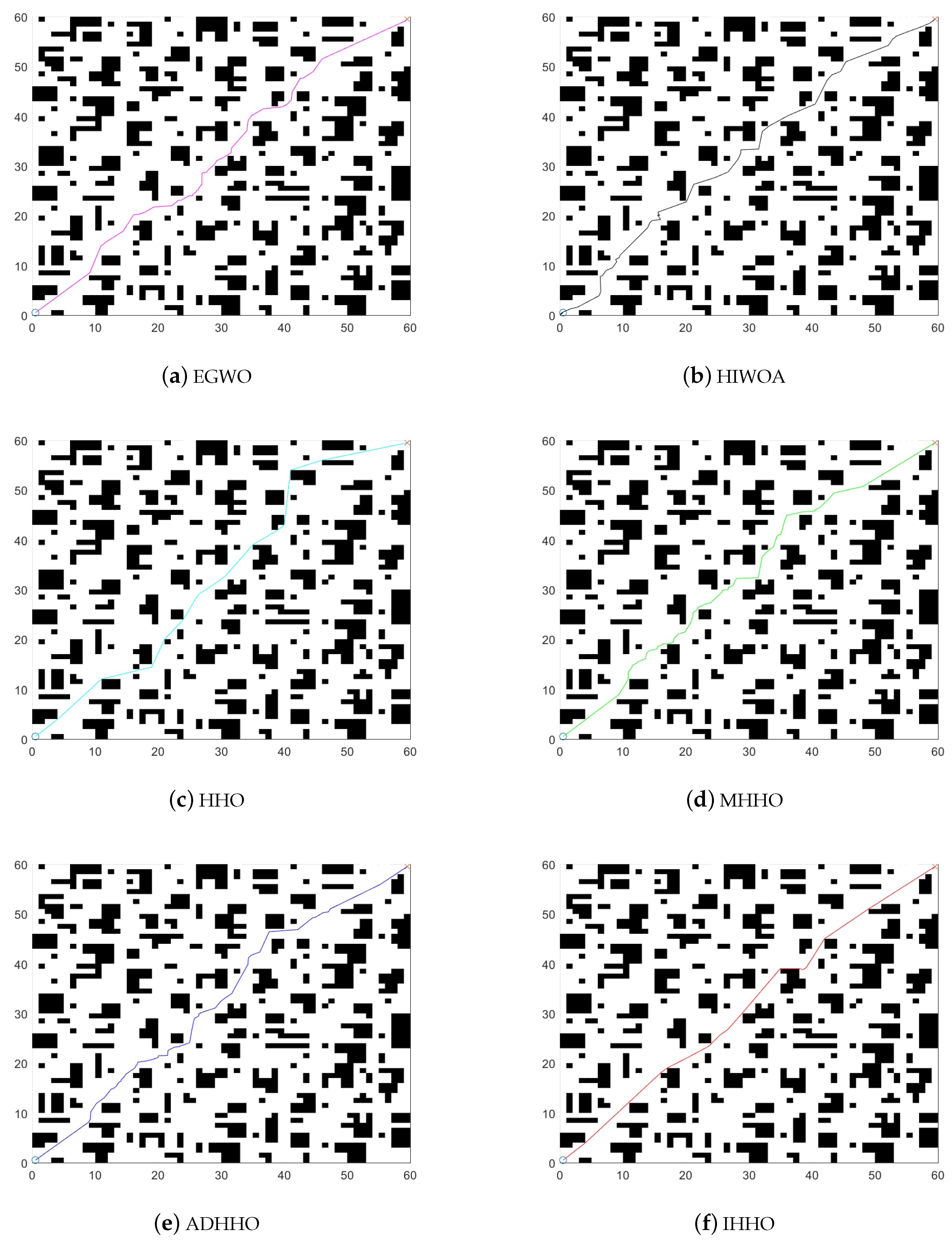
6. Grid Map Path Planning
6.1. Fusion of A* and IHHO Algorithm
6.2. Parameter Setting of Grid Map Path Planning
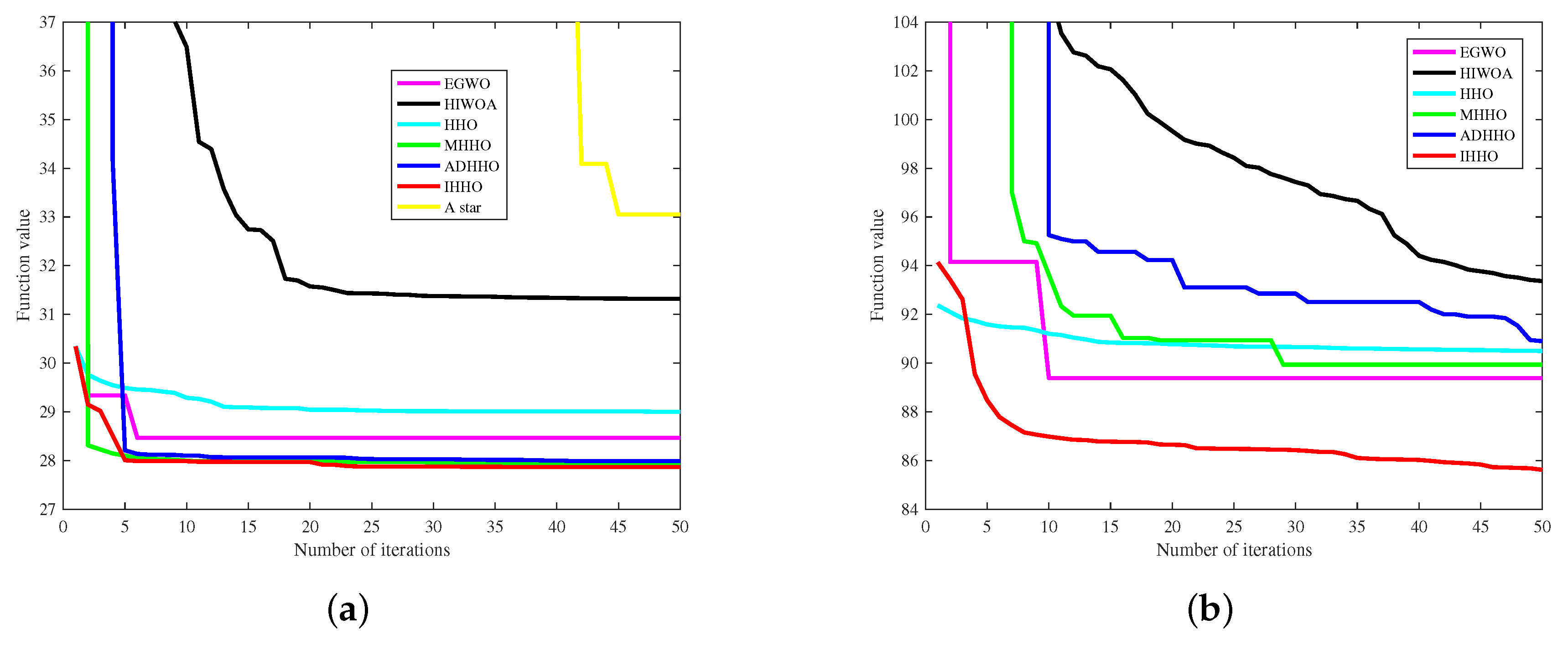
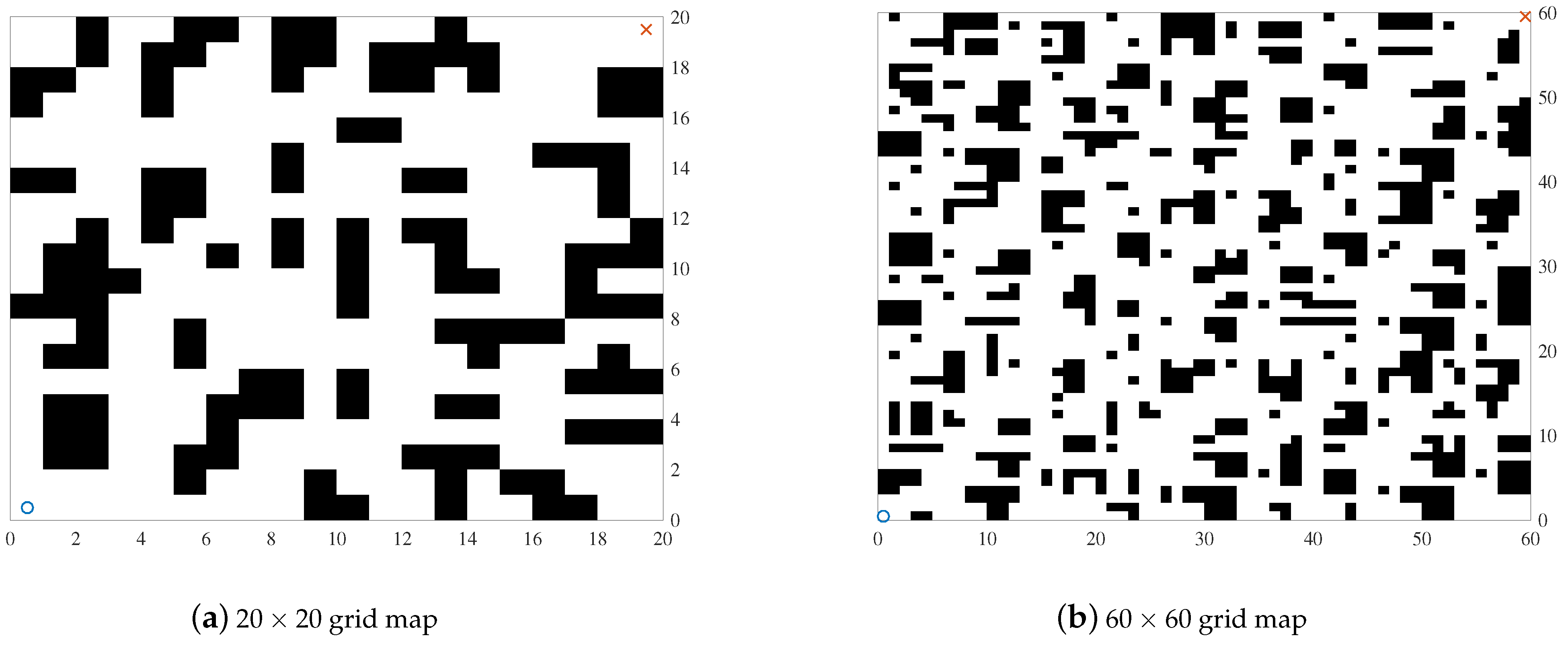
6.3. Experimental Results and Analysis of Path Planning
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| HHO | Harris Hawks Optimization |
| IHHO | Improved Harris Hawks Optimization |
| UAV | Unmanned Aerial Vehicle |
| PM | Particulate Matter |
| MHHO | Modified Harris Hawks optimization |
| ADHHO | Adaptive Cooperative Foraging and Dispersed Foraging Harris Hawks Optimization |
| NFL | No Free Lunch |
| GWO | Grey Wolf Optimization |
| WOA | Whale Optimization Algorithm |
| EGWO | Efficient Grey Wolf Optimization |
| PSO | Particle Swarm Optimization |
References
- Li, F.F.; Du, Y.; Jia, K.J. Path planning and smoothing of mobile robot based on improved artificial fish swarm algorithm. Sci. Rep. 2022, 12, 659. [Google Scholar] [CrossRef] [PubMed]
- Hou, Y.; Gao, H.; Wang, Z.; Du, C. Improved grey wolf optimization algorithm and application. Sensors 2022, 22, 3810. [Google Scholar] [CrossRef] [PubMed]
- Ou, Y.; Yin, P.; Mo, L. An Improved Grey Wolf Optimizer and Its Application in Robot Path Planning. Biomimetics 2023, 8, 84. [Google Scholar] [CrossRef] [PubMed]
- Yu, Z.; Si, Z.; Li, X.; Wang, D.; Song, H. A novel hybrid particle swarm optimization algorithm for path planning of UAVs. IEEE Internet Things J. 2022, 9, 22547–22558. [Google Scholar] [CrossRef]
- Rajamoorthy, R.; Arunachalam, G.; Kasinathan, P.; Devendiran, R.; Ahmadi, P.; Pandiyan, S.; Muthusamy, S.; Panchal, H.; Kazem, H.A.; Sharma, P. A novel intelligent transport system charging scheduling for electric vehicles using Grey Wolf Optimizer and Sail Fish Optimization algorithms. Energy Sources Part A Recover. Util. Environ. Eff. 2022, 44, 3555–3575. [Google Scholar] [CrossRef]
- Zhang, L.; Li, Y. Mobile robot path planning algorithm based on improved a star. Proc. J. Phys. Conf. Ser. 2021, 1848, 012013. [Google Scholar] [CrossRef]
- Gao, H.; Yan, L.; Shen, R.; Ma, W. Design and Implementation of Mobile Robot Path Planning Based on A-Star Algorithm. In Proceedings of the 2022 14th International Conference on Measuring Technology and Mechatronics Automation (ICMTMA), Changsha, China, 15–16 January 2022; pp. 467–470. [Google Scholar]
- Liu, L.S.; Lin, J.F.; Yao, J.X.; He, D.W.; Zheng, J.S.; Huang, J.; Shi, P. Path planning for smart car based on Dijkstra algorithm and dynamic window approach. Wirel. Commun. Mob. Comput. 2021, 2021, 8881684. [Google Scholar] [CrossRef]
- Lee, K.; Choi, D.; Kim, D. Incorporation of potential fields and motion primitives for the collision avoidance of unmanned aircraft. Appl. Sci. 2021, 11, 3103. [Google Scholar] [CrossRef]
- Yi, J.; Yuan, Q.; Sun, R.; Bai, H. Path planning of a manipulator based on an improved P_RRT* algorithm. Complex Intell. Syst. 2022, 8, 2227–2245. [Google Scholar] [CrossRef]
- Kang, J.G.; Lim, D.W.; Choi, Y.S.; Jang, W.J.; Jung, J.W. Improved RRT-connect algorithm based on triangular inequality for robot path planning. Sensors 2021, 21, 333. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95-International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Mirjalili, S.; Mirjalili, S. Genetic algorithm. Evol. Algorithms Neural Netw. Theory Appl. 2019, 780, 43–55. [Google Scholar]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Neshat, M.; Sepidnam, G.; Sargolzaei, M.; Toosi, A.N. Artificial fish swarm algorithm: A survey of the state-of-the-art, hybridization, combinatorial and indicative applications. Artif. Intell. Rev. 2014, 42, 965–997. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The whale optimization algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Tang, J.; Duan, H.; Lao, S. Swarm intelligence algorithms for multiple unmanned aerial vehicles collaboration: A comprehensive review. Artif. Intell. Rev. 2023, 56, 4295–4327. [Google Scholar] [CrossRef]
- Alizadehsani, R.; Roshanzamir, M.; Izadi, N.H.; Gravina, R.; Kabir, H.D.; Nahavandi, D.; Alinejad-Rokny, H.; Khosravi, A.; Acharya, U.R.; Nahavandi, S.; et al. Swarm intelligence in internet of medical things: A review. Sensors 2023, 23, 1466. [Google Scholar] [CrossRef]
- Wang, J.; Lin, D.; Zhang, Y.; Huang, S. An adaptively balanced grey wolf optimization algorithm for feature selection on high-dimensional classification. Eng. Appl. Artif. Intell. 2022, 114, 105088. [Google Scholar] [CrossRef]
- Liu, L.; Zhang, R. Multistrategy improved whale optimization algorithm and its application. Comput. Intell. Neurosci. 2022, 2022, 3418269. [Google Scholar] [CrossRef]
- Tajziehchi, K.; Ghabussi, A.; Alizadeh, H. Control and optimization against earthquake by using genetic algorithm. J. Appl. Eng. Sci. 2018, 8, 73–78. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, D.; Zhang, T.; Zhang, J.; Wang, J. A new path plan method based on hybrid algorithm of reinforcement learning and particle swarm optimization. Eng. Comput. 2022, 39, 993–1019. [Google Scholar] [CrossRef]
- Lan, X.; Lv, X.; Liu, W.; He, Y.; Zhang, X. Research on robot global path planning based on improved A-star ant colony algorithm. In Proceedings of the 2021 IEEE 5th Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 12–14 March 2021; Volume 5, pp. 613–617. [Google Scholar]
- Szczepanski, R.; Tarczewski, T. Global path planning for mobile robot based on Artificial Bee Colony and Dijkstra’s algorithms. In Proceedings of the 2021 IEEE 19th International Power Electronics and Motion Control Conference (PEMC), Gliwice, Poland, 25–29 April 2021; pp. 724–730. [Google Scholar]
- Xiang, D.; Lin, H.; Ouyang, J.; Huang, D. Combined improved A* and greedy algorithm for path planning of multi-objective mobile robot. Sci. Rep. 2022, 12, 13273. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z.; He, R.; Yang, K. A bioinspired path planning approach for mobile robots based on improved sparrow search algorithm. Adv. Manuf. 2022, 10, 114–130. [Google Scholar] [CrossRef]
- Liu, L.; Wang, X.; Yang, X.; Liu, H.; Li, J.; Wang, P. Path planning techniques for mobile robots: Review and prospect. Expert Syst. Appl. 2023, 227, 120254. [Google Scholar] [CrossRef]
- Heidari, A.A.; Mirjalili, S.; Faris, H.; Aljarah, I.; Mafarja, M.; Chen, H. Harris hawks optimization: Algorithm and applications. Future Gener. Comput. Syst. 2019, 97, 849–872. [Google Scholar] [CrossRef]
- Gezici, H.; Livatyalı, H. Chaotic Harris hawks optimization algorithm. J. Comput. Des. Eng. 2022, 9, 216–245. [Google Scholar] [CrossRef]
- Shehab, M.; Mashal, I.; Momani, Z.; Shambour, M.K.Y.; AL-Badareen, A.; Al-Dabet, S.; Bataina, N.; Alsoud, A.R.; Abualigah, L. Harris hawks optimization algorithm: Variants and applications. Arch. Comput. Methods Eng. 2022, 29, 5579–5603. [Google Scholar] [CrossRef]
- Hussien, A.G.; Abualigah, L.; Abu Zitar, R.; Hashim, F.A.; Amin, M.; Saber, A.; Almotairi, K.H.; Gandomi, A.H. Recent advances in harris hawks optimization: A comparative study and applications. Electronics 2022, 11, 1919. [Google Scholar] [CrossRef]
- Basha, J.; Bacanin, N.; Vukobrat, N.; Zivkovic, M.; Venkatachalam, K.; Hubálovskỳ, S.; Trojovskỳ, P. Chaotic harris hawks optimization with quasi-reflection-based learning: An application to enhance cnn design. Sensors 2021, 21, 6654. [Google Scholar] [CrossRef]
- Jia, H.; Lang, C.; Oliva, D.; Song, W.; Peng, X. Dynamic harris hawks optimization with mutation mechanism for satellite image segmentation. Remote Sens. 2019, 11, 1421. [Google Scholar] [CrossRef]
- Bao, X.; Jia, H.; Lang, C. A novel hybrid harris hawks optimization for color image multilevel thresholding segmentation. IEEE Access 2019, 7, 76529–76546. [Google Scholar] [CrossRef]
- Zhang, R.; Li, S.; Ding, Y.; Qin, X.; Xia, Q. UAV Path Planning Algorithm Based on Improved Harris Hawks Optimization. Sensors 2022, 22, 5232. [Google Scholar] [CrossRef] [PubMed]
- Du, P.; Wang, J.; Hao, Y.; Niu, T.; Yang, W. A novel hybrid model based on multi-objective Harris hawks optimization algorithm for daily PM2. 5 and PM10 forecasting. Appl. Soft Comput. 2020, 96, 106620. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhou, X.; Shih, P.C. Modified Harris Hawks optimization algorithm for global optimization problems. Arab. J. Sci. Eng. 2020, 45, 10949–10974. [Google Scholar] [CrossRef]
- Liu, X.; Liang, T. Harris hawk optimization algorithm based on square neighborhood and random array. Control. Decis 2021, 37, 2467–2476. [Google Scholar]
- Zhu, C.; Pan, X.; Zhang, Y. Harris hawks optimization algorithm based on chemotaxis correction. J. Comput. Appl. 2022, 42, 1186. [Google Scholar]
- Sihwail, R.; Omar, K.; Ariffin, K.A.Z.; Tubishat, M. Improved harris hawks optimization using elite opposition-based learning and novel search mechanism for feature selection. IEEE Access 2020, 8, 121127–121145. [Google Scholar] [CrossRef]
- Zhang, X.; Zhao, K.; Niu, Y. Improved Harris hawks optimization based on adaptive cooperative foraging and dispersed foraging strategies. IEEE Access 2020, 8, 160297–160314. [Google Scholar] [CrossRef]
- Wolpert, D.H.; Macready, W.G. No free lunch theorems for optimization. IEEE Trans. Evol. Comput. 1997, 1, 67–82. [Google Scholar] [CrossRef]
- Kennedy, J. Swarm Intelligence; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Li, C.; Huang, X.; Ding, J.; Song, K.; Lu, S. Global path planning based on a bidirectional alternating search A* algorithm for mobile robots. Comput. Ind. Eng. 2022, 168, 108123. [Google Scholar] [CrossRef]
- Yao, J.; Lin, C.; Xie, X.; Wang, A.J.; Hung, C.C. Path planning for virtual human motion using improved A* star algorithm. In Proceedings of the 2010 Seventh International Conference on Information Technology: New Generations, Las Vegas, NV, USA, 12–14 April 2010; pp. 1154–1158. [Google Scholar]
- Mirjalili, S. SCA: A sine cosine algorithm for solving optimization problems. Knowl.-Based Syst. 2016, 96, 120–133. [Google Scholar] [CrossRef]
- Tanyildizi, E.; Demir, G. Golden sine algorithm: A novel math-inspired algorithm. Adv. Electr. Comput. Eng. 2017, 17, 71–78. [Google Scholar] [CrossRef]
- Zhu, C.; Zhang, Y.; Pan, X.; Chen, Q.; Fu, Q. Improved Harris hawks optimization algorithm based on quantum correction and Nelder-Mead simplex method. Math. Biosci. Eng. 2022, 19, 7606–7648. [Google Scholar] [CrossRef] [PubMed]
- Kiani, F.; Nematzadeh, S.; Anka, F.A.; Findikli, M.A. Chaotic Sand Cat Swarm Optimization. Mathematics 2023, 11, 2340. [Google Scholar] [CrossRef]
- Li, Y.; Wang, H.; Fan, J.; Geng, Y. A novel Q-learning algorithm based on improved whale optimization algorithm for path planning. PLoS ONE 2022, 17, e0279438. [Google Scholar] [CrossRef] [PubMed]
- Long, W.; Cai, S.H.; Jiao, J.J.; Wu, T.B. An improved grey wolf optimization algorithm. ACTA Electonica Sin. 2019, 47, 169. [Google Scholar]
- Tang, C.; Sun, W.; Wu, W.; Xue, M. A hybrid improved whale optimization algorithm. In Proceedings of the 2019 IEEE 15th International Conference on Control and Automation (ICCA), Edinburgh, UK, 16–19 July 2019; pp. 362–367. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Parameter Name | Parameter Value |
|---|---|---|
| PWOA | Learning coefficient | 0.2 |
| Discount factor | 0.8 | |
| EGWO | Individual memory coefficient | 0.1 |
| Communication coefficient | 0.9 | |
| Control parameter initial value and | 2 and 0 | |
| ADHHO | Attenuation factor | 1.5 |
| IHHO | The number of random Harris hawks n | 3 |
| Vector weight |
| Algorithm | Min | Max | Mean | Out-of-Bound Probability |
|---|---|---|---|---|
| HHO | 36,607 | 40,777 | 38,067.00 | 8.459% |
| MHHO | 44,882 | 50,476 | 47,758.50 | 10.613% |
| ADHHO | 3796 | 25,201 | 12,726.75 | 2.828 % |
| IHHO | 56 | 638 | 351.00 | 0.078% |
| No | Function | Dimension | Interval | |
|---|---|---|---|---|
| F1 | 30 | [−100,100] | 0 | |
| F2 | 30 | [−10,10] | 0 | |
| F3 | 30 | [−100,100] | 0 | |
| F4 | 30 | [−100,100] | 0 | |
| F5 | 30 | [−1.28,1.28] | 0 | |
| F6 | 30 | [−500,500] | −418.9829 × n | |
| F7 | 30 | [−5.12,5.12] | 0 | |
| F8 | 30 | [−32,32] | 0 | |
| F9 | 2 | [−65.536,65.536] | 1 | |
| F10 | 4 | [−5,5] | 0.00030 | |
| F11 | 4 | [0,10] | −10.5363 |
| Function | Index | HHO | Circle Map | Improved Sine-Trend Search | Random Guidance Strategy | Nonlinear Jump Strength | IHHO |
|---|---|---|---|---|---|---|---|
| F1 | mean | 1.50 × | 6.31 | 4.64 | 3.15 | 1.97 | 3.25 |
| best | 1.28 | 1.39 | 3.38 | 2.55 | 2.53 | 1.62 | |
| worst | 3.63 | 1.86 | 1.39 | 9.44 | 5.86 | 4.20 | |
| std | 6.75 | 3.40 | 2.54 | 1.72 | 1.07 | 0.99 | |
| F2 | mean | 3.95 | 8.27 | 8.18 | 5.38 | 6.46 | 2.16 |
| best | 5.45 | 8.21 | 1.70 | 2.85 | 1.93 | 9.26 | |
| worst | 8.91 | 1.50 | 2.43 | 6.50 | 1.80 | 6.48 | |
| std | 1.64 | 2.99 | 4.43 | 1.54 | 3.28 | 1.18 | |
| F3 | mean | 5.54 | 3.33 | 6.52 | 7.81 | 7.56 | 3.85 |
| best | 5.14 | 5.40 | 2.56 | 3.43 | 7.08 | 3.39 | |
| worst | 1.65 | 9.97 | 1.74 | 2.06 | 2.27 | 1.15 | |
| std | 3.02 | 1.82 | 3.18 | 3.77 | 4.14 | 2.10 | |
| F4 | mean | 3.16 | 1.55 | 1.51 | 2.24 | 2.74 | 6.19 |
| best | 1.21 | 1.47 | 4.59 | 5.30 | 1.48 | 5.35 | |
| worst | 8.18 | 2.72 | 3.65 | 6.70 | 4.36 | 1.33 | |
| std | 1.49 | 5.42 | 6.76 | 1.22 | 9.36 | 2.44 | |
| F5 | mean | 1.58 | 1.44 | 9.00 | 1.46 | 1.35 | 3.74 |
| best | 9.70 | 4.00 | 4.08 | 1.41 | 6.13 | 2.33 | |
| worst | 5.82 | 7.22 | 2.73 | 6.68 | 4.15 | 9.57 | |
| std | 1.75 | 1.52 | 7.76 | 1.48 | 1.10 | 2.77 | |
| F6 | mean | −1.26 | −1.25 | −1.25 | −1.25 | −1.26 | −1.26 |
| best | −1.26 | −1.26 | −1.26 | −1.26 | −1.26 | −1.26 | |
| worst | −1.26 | −1.23 | −1.16 | −1.16 | − 1.26 | −1.26 | |
| std | 1.43 | 8.41 | 2.25 | 1.75 | 1.07 | 2.89 | |
| F7 | mean | 0 | 0 | 0 | 0 | 0 | 0 |
| best | 0 | 0 | 0 | 0 | 0 | 0 | |
| worst | 0 | 0 | 0 | 0 | 0 | 0 | |
| std | 0 | 0 | 0 | 0 | 0 | 0 | |
| F8 | mean | 8.88 | 8.88 | 8.88 | 8.88 | 8.88 | 8.88 |
| best | 8.88 | 8.88 | 8.88 | 8.88 | 8.88 | 8.88 | |
| worst | 8.88 | 8.88 | 8.88 | 8.88 | 8.88 | 8.88 | |
| std | 0 | 0 | 0 | 0 | 0 | 0 | |
| F9 | mean | 1.43 | 1.29 | 1.86 | 2.08 | 1.30 | 9.98 |
| best | 9.98 | 9.98 | 9.98 | 9.98 | 9.98 | 9.98 | |
| worst | 5.93 | 5.93 | 2.98 | 5.93 | 2.98 | 1.01 | |
| std | 1.26 | 9.40 | 9.30 | 1.80 | 5.30 | 1.57 | |
| F10 | mean | 3.89 | 7.04 | 5.32 | 3.41 | 3.45 | 3.40 |
| best | 3.09 | 3.16 | 3.37 | 3.08 | 3.10 | 3.02 | |
| worst | 1.51 | 1.79 | 1.33 | 3.99 | 4.51 | 4.00 | |
| std | 2.15 | 5.30 | 2.03 | 2.96 | 3.82 | 1.78 | |
| F11 | mean | −5.03 | −5.12 | −6.33 | −6.61 | −5.47 | −1.03 |
| best | −5.13 | −5.11 | −1.03 | −1.05 | −1.03 | −1.05 | |
| worst | −2.41 | −5.13 | −5.06 | −5.00 | −5.12 | −9.50 | |
| std | 4.94 | 4.49 | 1.79 | 2.38 | 1.30 | 2.25 |
| Function | Index | GWO | WOA | PWOA | HHO | MHHO | ADHHO | IHHO |
|---|---|---|---|---|---|---|---|---|
| F1 | mean | 3.59 | 1.60 | 8.71 | 1.50 | 1.88 | 5.93 | 3.25 |
| best | 1.97 | 2.58 | 1.48 | 1.28 | 1.44 | 3.57 | 1.62 | |
| worst | 9.37 | 3.04 | 2.61 | 3.63 | 5.64 | 3.35 | 4.20 | |
| std | 1.70 | 6.20 | 4.77 | 6.75 | 1.03 | 2.14 | 0.99 | |
| F2 | mean | 9.43 | 3.71 | 2.72 | 3.95 | 1.55 | 5.70 | 2.16 |
| best | 2.25 | 4.72 | 2.67 | 5.45 | 3.13 | 1.81 | 9.26 | |
| worst | 2.80 | 1.01 | 5.91 | 8.91 | 4.32 | 4.08 | 6.48 | |
| std | 6.09 | 1.84 | 1.08 | 1.64 | 7.86 | 9.43 | 1.18 | |
| F3 | mean | 1.72 | 4.95 | 5.25 | 5.54 | 1.72 | 8.91 | 3.85 |
| best | 9.62 | 1.35 | 2.73 | 5.14 | 1.34 | 4.21 | 3.39 | |
| worst | 2.11 | 7.34 | 9.07 | 1.65 | 4.10 | 1.21 | 1.15 | |
| std | 4.21 | 1.30 | 1.63 | 3.02 | 7.66 | 3.01 | 2.10 | |
| F4 | mean | 7.52 | 5.36 | 5.64 | 3.16 | 7.44 | 9.85 | 6.19 |
| best | 6.17 | 2.30 | 3.05 | 1.21 | 1.17 | 5.74 | 5.35 | |
| worst | 2.70 | 8.78 | 9.14 | 8.18 | 1.79 | 1.61 | 1.33 | |
| std | 6.33 | 2.64 | 2.73 | 1.49 | 3.33 | 1.68 | 2.44 | |
| F5 | mean | 1.96 | 5.06 | 2.30 | 1.58 | 1.42 | 1.01 | 3.74 |
| best | 4.54 | 1.86 | 1.04 | 9.70 | 7.34 | 2.79 | 2.33 | |
| worst | 4.20 | 1.69 | 8.45 | 5.82 | 6.07 | 2.63 | 9.57 | |
| std | 9.39 | 4.65 | 2.24 | 1.75 | 1.46 | 9.93 | 2.77 | |
| F6 | mean | −6.08 | −1.00 | −9.75 | −1.26 | −1.26 | −1.26 | −1.26 |
| best | −7.31 | −1.26 | −1.26 | −1.26 | −1.26 | −1.26 | −1.26 | |
| worst | −3.19 | −7.44 | −6.98 | −1.26 | −1.26 | −1.26 | −1.26 | |
| std | 9.71 | 1.79 | 1.77 | 1.43 | 5.77 | 3.91 | 2.89 | |
| F7 | mean | 3.18 | 0 | 0 | 0 | 0 | 0 | 0 |
| best | 5.68 | 0 | 0 | 0 | 0 | 0 | 0 | |
| worst | 1.02 | 0 | 0 | 0 | 0 | 0 | 0 | |
| std | 2.74 | 0 | 0 | 0 | 0 | 0 | 0 | |
| F8 | mean | 1.04 | 4.68 | 4.20 | 8.88 | 8.88 | 8.88 | 8.88 |
| best | 7.55 | 8.88 | 8.88 | 8.88 | 8.88 | 8.88 | 8.88 | |
| worst | 7.55 | 7.99 | 7.99 | 8.88 | 8.88 | 8.88 | 8.88 | |
| std | 1.69 | 2.46 | 2.63 | 0 | 0 | 0 | 0 | |
| F9 | mean | 5.17 | 3.90 | 6.34 | 1.43 | 1.33 | 1.32 | 9.98 |
| best | 9.98 | 9.98 | 9.98 | 9.98 | 9.98 | 9.98 | 9.98 | |
| worst | 1.27 | 1.08 | 1.27 | 5.93 | 5.93 | 1.92 | 1.01 | |
| std | 4.54 | 3.94 | 4.74 | 1.26 | 9.47 | 9.41 | 1.57 | |
| F10 | mean | 3.73 | 8.83 | 7.04 | 3.89 | 4.04 | 3.52 | 3.40 |
| best | 3.07 | 3.08 | 3.16 | 3.09 | 3.08 | 3.07 | 3.02 | |
| worst | 2.04 | 2.25 | 2.25 | 1.51 | 1.54 | 2.01 | 4.00 | |
| std | 7.57 | 5.25 | 4.18 | 2.15 | 2.75 | 0.24 | 1.78 | |
| F11 | mean | −1.04 | −6.97 | −5.87 | −5.03 | −5.26 | −6.35 | −1.03 |
| best | −1.05 | −1.05 | −1.05 | −5.13 | −1.04 | −1.04 | −1.05 | |
| worst | −5.17 | −2.42 | −1.67 | −2.41 | −3.77 | −4.98 | −9.50 | |
| std | 9.79 | 3.03 | 2.70 | 4.94 | 1.01 | 2.17 | 2.25 |
| Size | Parameter | Value |
|---|---|---|
| Number of population | 20 | |
| The number of iterations of the path | 50 | |
| Number of iterations of the population | 500 | |
| Number of population | 60 | |
| The number of iterations of the path | 50 | |
| Number of iterations of the population | 1000 |
| Size | Index | A-Star | EGWO | HIWOA | HHO | MHHO | ADHHO | IHHO |
|---|---|---|---|---|---|---|---|---|
| 20 × 20 | Mean | / | 29.00 | 31.20 | 28.86 | 34.09 | 30.25 | 28.00 |
| Best | 33.05 | 28.10 | 29.25 | 28.13 | 28.75 | 27.74 | 27.30 | |
| Worst | / | 31.06 | 34.18 | 30.14 | 44.91 | 35.12 | 29.32 | |
| 60 × 60 | Mean | / | 91.97 | 96.92 | 90.50 | 94.37 | 93.11 | 85.39 |
| Best | / | 89.39 | 92.71 | 88.16 | 87.82 | 88.73 | 84.47 | |
| Worst | / | 95.93 | 104.79 | 93.42 | 100.51 | 97.08 | 87.62 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, L.; Fu, Q.; Tong, N. An Improved Harris Hawks Optimization Algorithm and Its Application in Grid Map Path Planning. Biomimetics 2023, 8, 428. https://doi.org/10.3390/biomimetics8050428
Huang L, Fu Q, Tong N. An Improved Harris Hawks Optimization Algorithm and Its Application in Grid Map Path Planning. Biomimetics. 2023; 8(5):428. https://doi.org/10.3390/biomimetics8050428
Chicago/Turabian StyleHuang, Lin, Qiang Fu, and Nan Tong. 2023. "An Improved Harris Hawks Optimization Algorithm and Its Application in Grid Map Path Planning" Biomimetics 8, no. 5: 428. https://doi.org/10.3390/biomimetics8050428
APA StyleHuang, L., Fu, Q., & Tong, N. (2023). An Improved Harris Hawks Optimization Algorithm and Its Application in Grid Map Path Planning. Biomimetics, 8(5), 428. https://doi.org/10.3390/biomimetics8050428