
Bidirectional Underwater Drag Reduction on Bionic Flounder Two-Tier Structural Surfaces

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Bionic Sample Preparation
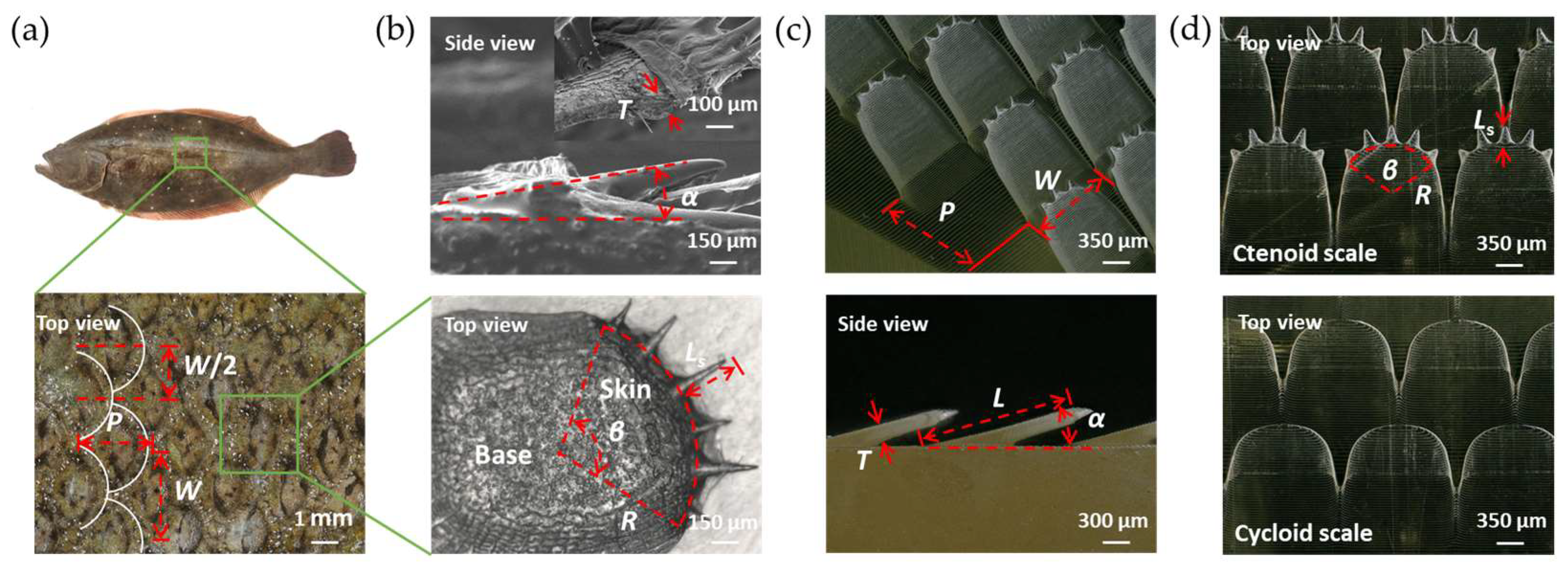
2.1. Bionic Prototype Analysis
2.2. Sample Fabrication
3. Methods and Results
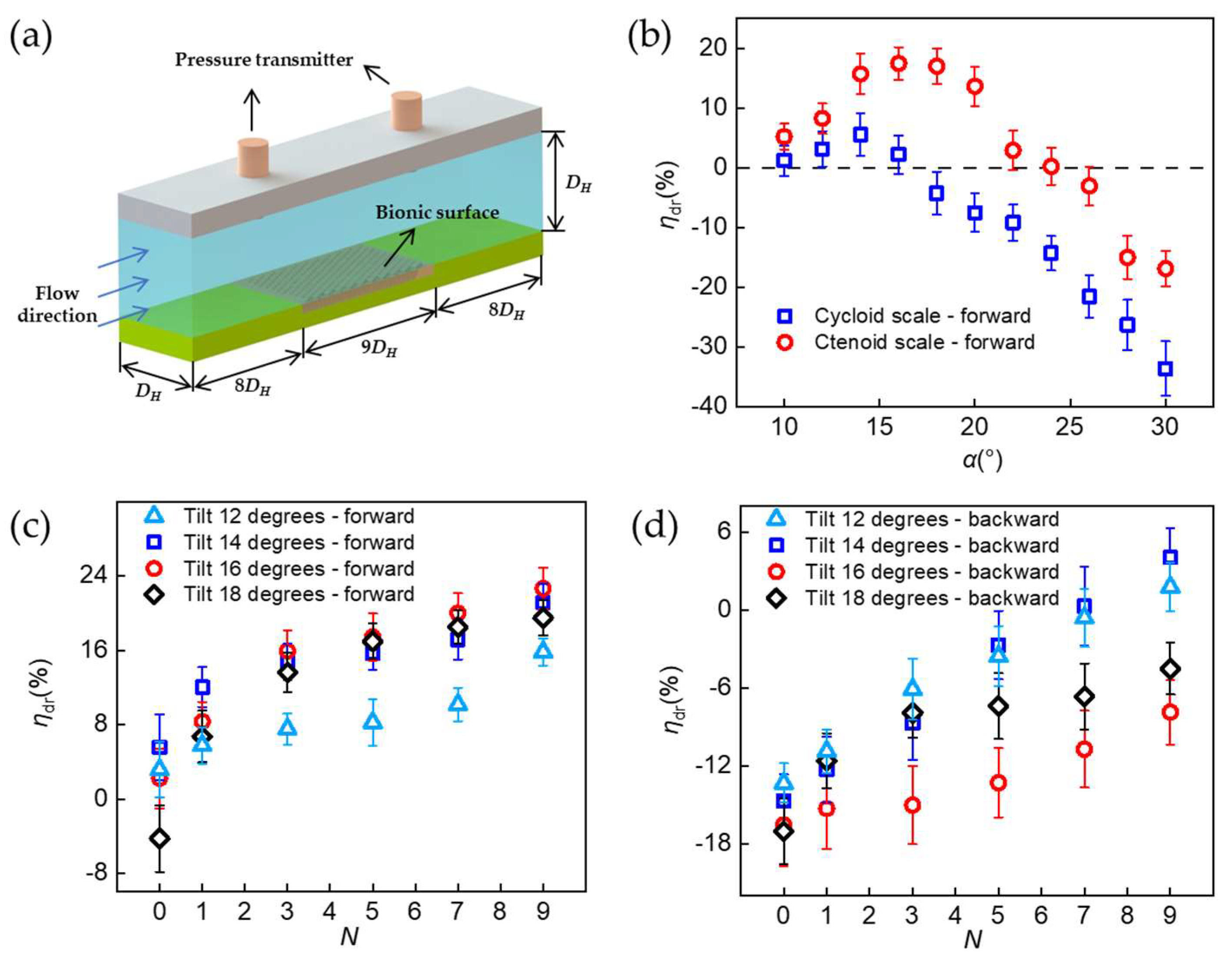
3.1. Drag Reduction Measurements
3.2. Drag Reduction Performance of BFTSS
3.3. Bidirectional Drag Reduction of BFTSS
4. Discussion
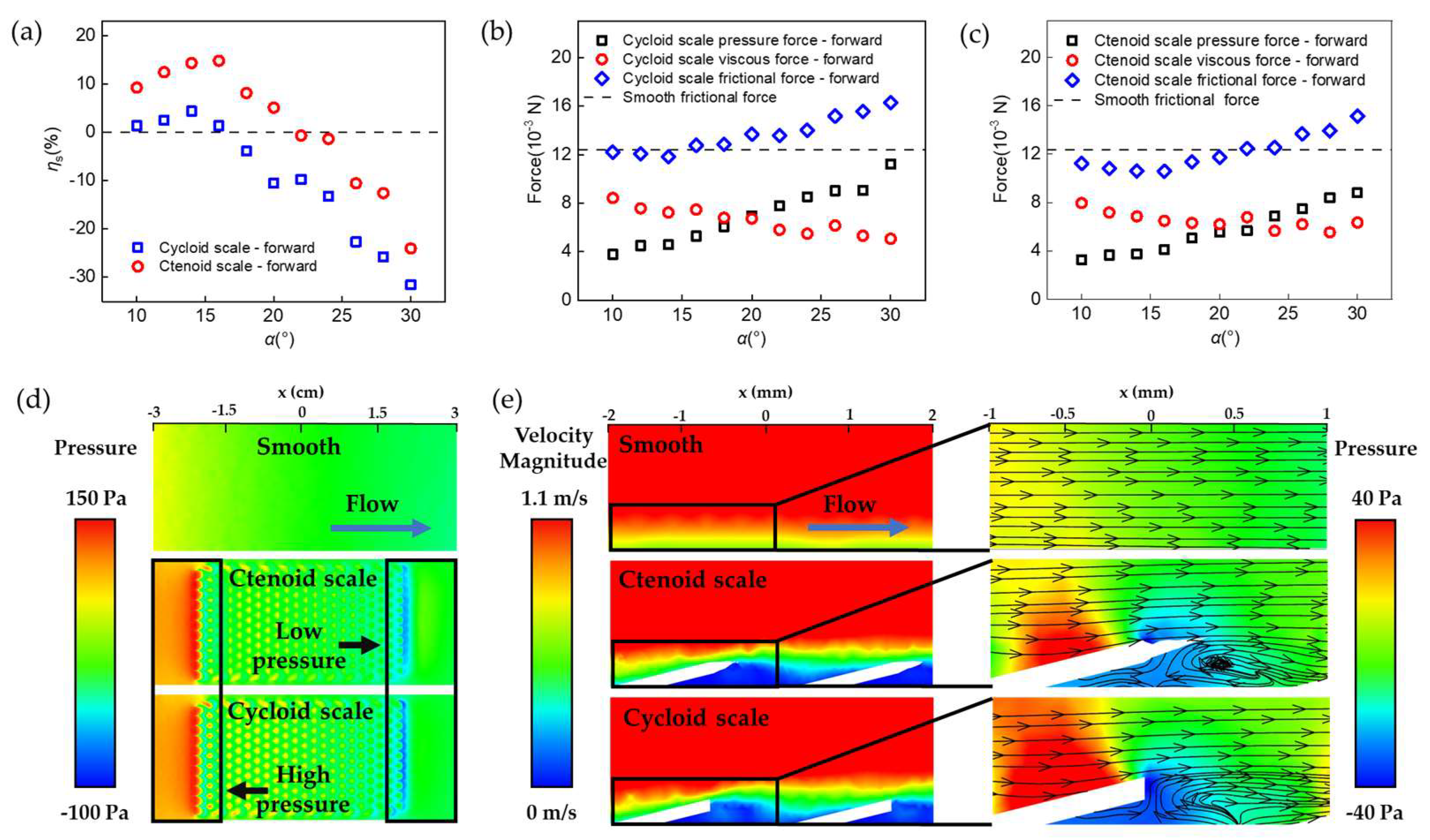
4.1. Numerical Simulations
4.2. Drag Reduction Mechanisms of BFTSS
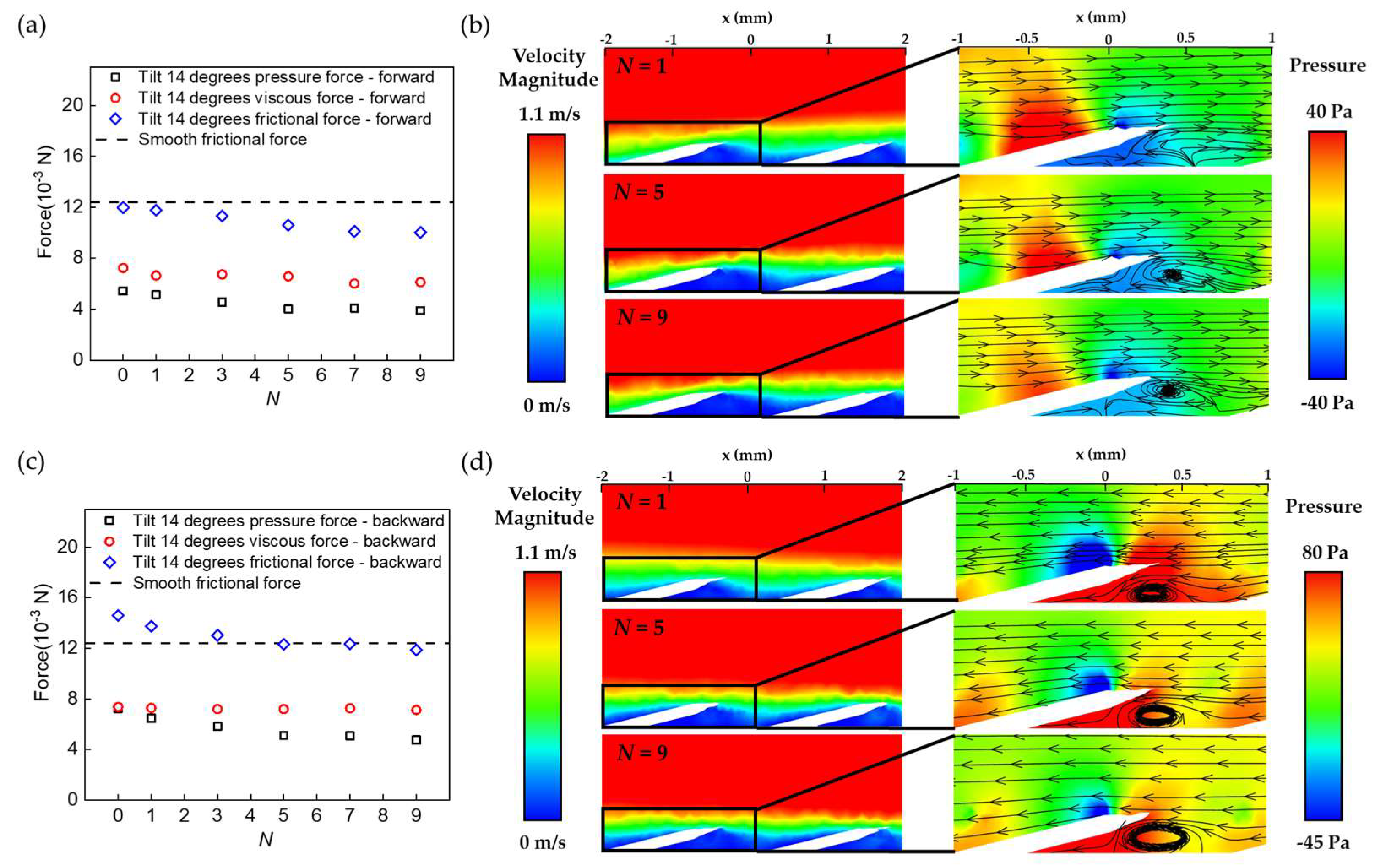
4.3. Effect of Second-Tier Spikes
4.4. Origin of Bidirectional Drag Reduction
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Martouzet, G.; Lee, C.; Pirat, C.; Ybert, C.; Biance, A.L. Drag reduction on drop during impact on multiscale superhydrophobic surfaces. J. Fluid Mech. 2020, 892, R2. [Google Scholar] [CrossRef]
- Rong, W.; Zhang, H.; Zhang, T.; Mao, Z.; Liu, X.; Song, K. Drag Reduction Using Lubricant-Impregnated Anisotropic Slippery Surfaces In-spired by Bionic Fish Scale Surfaces Containing Micro-/Nanostructured Arrays. Adv. Eng. Mater. 2021, 23, 2000821. [Google Scholar] [CrossRef]
- Wang, Z.; Liu, X.; Ji, J.; Zhang, T.; Xu, J.; Jiao, Y.; Liu, K. Underwater Drag Reduction and Buoyancy Enhancement on Biomimetic Antiabrasive Superhydrophobic Coatings. ACS Appl. Mater. Interfaces 2021, 13, 48270–48280. [Google Scholar] [CrossRef] [PubMed]
- Xu, M.; Yu, N.; Kim, J.; Kim, C.J. Superhydrophobic drag reduction in high-speed towing tank. J. Fluid Mech. 2020, 908, A6. [Google Scholar] [CrossRef]
- Dilip, D.; Bobji, M.S.; Govardhan, R.N. Effect of absolute pressure on flow through a textured hydrophobic microchannel. Microfluid. Nanofluidics 2015, 19, 1409–1427. [Google Scholar] [CrossRef]
- Chen, K.; Wei, Z.G.; Lin, Y.S.; Zhao, X.F.; Qi, X.; Huang, C.H.; Yang, X.H.; Zhou, H.K.; Ke, H.B. Research on Drag Reduction Mechanism and Optimization Design of Bionic Jet Flow. IOP Conf. Ser. Earth Environ. Sci. 2021, 701, 012056. [Google Scholar] [CrossRef]
- Gu, Y.; Zhao, G.; Zheng, J.; Li, Z.; Liu, W.; Muhammad, F. Experimental and numerical investigation on drag reduction of non-smooth bionic jet surface. Ocean Eng. 2014, 81, 50–57. [Google Scholar] [CrossRef]
- Teng, H.; Liu, N.; Lu, X.; Khomami, B. Turbulent drag reduction in plane Couette flow with polymer additives: A direct numerical simulation study. J. Fluid Mech. 2018, 846, 482–507. [Google Scholar] [CrossRef]
- Al-Sarkhi, A. Effect of mixing on frictional loss reduction by drag reducing polymer in annular horizontal two-phase flows. Int. J. Multiph. Flow 2012, 39, 186–192. [Google Scholar] [CrossRef]
- Wu, L.; Luo, G.; He, F.; Chen, L.; Wang, S.; Fan, X. Bionic research on Paramisgurnus dabryanus scales for drag reduction. RSC Adv. 2022, 12, 22226–22235. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Su, Y.; Hou, X.; Hong, M. Directional sliding of water: Biomimetic snake scale surfaces. Opto-Electron. Adv. 2021, 4, 210008. [Google Scholar] [CrossRef]
- Wu, W.; Yu, S.; Schreiber, P.; Dollmann, A.; Lutz, C.; Gomard, G.; Greiner, C.; Hölscher, H. Variation of the frictional anisotropy on ventral scales of snakes caused by nanoscale steps. Bioinspiration Biomim. 2020, 15, 056014. [Google Scholar] [CrossRef]
- Aljallis, E.; Sarshar, M.; Datla, R.; Sikka, V.; Jones, A.; Choi, C.H. Experimental study of skin friction drag reduction on superhydrophobic flat plates in high Reynolds number boundary layer flow. Phys. Fluids 2013, 25, 25103. [Google Scholar] [CrossRef]
- Truesdell, R.; Mammoli, A.; Vorobieff, P.; van Swol, F.; Brinker, C.J. Drag Reduction on a Patterned Superhydrophobic Surface. Phys. Rev. Lett. 2006, 97, 044504. [Google Scholar] [CrossRef] [PubMed]
- Gu, Y.Q.; Yu, S.W.; Mou, J.G.; Fan, T.X.; Zheng, S.H.; Zhao, G. Experimental study of drag reduction characteristics related to the multifactor coupling of a bionic jet surface. J. Hydrodyn. 2019, 31, 186–194. [Google Scholar] [CrossRef]
- Baghele, P.; Pachghare, P. Review on methods of drag reduction for two-phase horizontal flows. In AIP Conference Proceedings; AIP Publishing LLC: Melville, NY, USA, 2022; Volume 2421, p. 060009. [Google Scholar] [CrossRef]
- Abdulbari, H.A.; Amir, R. Drag Reduction Performance and Stability of an Organic Polymer, Surfactant, and Their Complexes. Chem. Eng. Technol. 2021, 44, 2333–2340. [Google Scholar] [CrossRef]
- Gasljevic, K.; Hall, K.; Chapman, D.; Matthys, E.F. Invariant Type-B characteristics of drag-reducing microalgal biopolymer solutions. Exp. Fluids 2017, 58, 54. [Google Scholar] [CrossRef]
- Nesyn, G.V.; Manzhai, V.N.; Suleimanova, Y.V.; Stankevich, V.S.; Konovalov, K.B. Polymer drag-reducing agents for transportation of hydrocarbon liquids: Mechanism of action, estimation of efficiency, and features of production. Polym. Sci. Ser. A 2012, 54, 61–67. [Google Scholar] [CrossRef]
- Liu, K.; Jiang, L. Bio-inspired design of multiscale structures for function integration. Nano Today 2011, 6, 155–175. [Google Scholar] [CrossRef]
- Yun, G.; Tao, L.; Jie, M.; Zhengzan, S.; Peijian, Z. Analysis of Drag Reduction Methods and Mechanisms of Turbulent. Appl. Bionics Biomech. 2017, 2017, 6858720. [Google Scholar]
- Han, Z.; Mu, Z.; Yin, W.; Li, W.; Niu, S.; Zhang, J.; Ren, L. Biomimetic multifunctional surfaces inspired from animals. Adv. Colloid Interface Sci. 2016, 234, 27–50. [Google Scholar] [CrossRef] [PubMed]
- Tian, G.; Fan, D.; Feng, X.; Honggen, Z. Thriving artificial underwater drag-reduction materials inspired from aquatic animals: Progresses and challenges. RSC Adv. 2021, 11, 3399–3428. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Deng, J.; Yue, H.; Ge, D.; Zou, X. Wear performance of electrohydrodynamically atomized WS2 coatings deposited on bio-mimetic shark-skin textured surfaces. Tribol. Int. 2019, 134, 240–251. [Google Scholar] [CrossRef]
- Bixler, G.D.; Bhushan, B. Shark skin inspired low-drag microstructured surfaces in closed channel flow. J. Colloid Interface Sci. 2013, 393, 384–396. [Google Scholar] [CrossRef] [PubMed]
- Pu, X.; Li, G.; Liu, Y. Progress and Perspective of Studies on Biomimetic Shark Skin Drag Reduction. ChemBioEng Rev. 2016, 3, 26–40. [Google Scholar] [CrossRef]
- Singh, A.V.; Rahman, A.; Kumar, N.S.; Aditi, A.; Galluzzi, M.; Bovio, S.; Barozzi, S.; Montani, E.; Parazzoli, D. Bio-inspired approaches to design smart fabrics. Mater. Des. 2012, 36, 829–839. [Google Scholar] [CrossRef]
- Li, L.; Li, G.; Li, R.; Xiao, Q.; Liu, H. Multi-fin kinematics and hydrodynamics in pufferfish steady swimming. Ocean Eng. 2018, 158, 111–122. [Google Scholar] [CrossRef]
- Yamauchi, Y.; Tenjimbayashi, M.; Samitsu, S.; Naito, M. Durable and Flexible Superhydrophobic Materials: Abra-sion/Scratching/Slicing/Droplet Impacting/Bending/Twisting-Tolerant Composite with Porcupinefish-Like Structure. ACS Appl. Mater. Interfaces 2019, 11, 32381–32389. [Google Scholar] [CrossRef]
- Wu, L.; Jiao, Z.; Song, Y.; Ren, W.; Niu, S.; Han, Z. Water-trapping and drag-reduction effects of fish Ctenopharyngodon idellus scales and their simulations. Sci. China Technol. Sci. 2017, 60, 1111–1117. [Google Scholar] [CrossRef]
- Nishimoto, S.; Bhushan, B. Bioinspired self-cleaning surfaces with superhydrophobicity, superoleophobicity, and superhydrophilicity. RSC Adv. 2012, 3, 671–690. [Google Scholar] [CrossRef]
- Liu, M.; Wang, S.; Wei, Z.; Song, Y.; Jiang, L. Bioinspired Design of a Superoleophobic and Low Adhesive Water/Solid Interface. Adv. Mater. 2009, 21, 665–669. [Google Scholar] [CrossRef]
- Zhang, K.; Ma, C.; Zhang, B.; Zhao, B.; Wang, Q. Drag Reduction Characteristics of Bionic Mucous Membrane Acting on the Turbulent Boundary Layer. J. Appl. Fluid Mech. 2021, 14, 1317–1327. [Google Scholar]
- Wang, Y.; Zhang, Z.; Xu, J.; Yu, H. One-step method using laser for large-scale preparation of bionic superhydrophobic & drag-reducing fish-scale surface. Surf. Coat. Technol. 2021, 409, 126801. [Google Scholar] [CrossRef]
- Zhang, D.Y.; Luo, Y.H.; Li, X.; Chen, H.W. Numerical Simulation and Experimental Study of Drag-Reducing Surface of a Real Shark Skin. J. Hydrodyn. 2011, 23, 204–211. [Google Scholar] [CrossRef]
- Wen, L.; Weaver, J.C.; Lauder, G.V. Biomimetic shark skin: Design, fabrication and hydrodynamic function. J. Exp. Biol. 2014, 217, 1656–1666. [Google Scholar] [CrossRef]
- Wu, T.; Chen, W.; Zhao, A.; He, P.; Chen, H. A comprehensive investigation on micro-structured surfaces for underwater drag re-duction. Ocean Eng. 2020, 218, 107902. [Google Scholar] [CrossRef]
- Ibrahim, M.; Philip, S.; Lam, S.S.; Sunami, Y. Evaluation of an Antifouling Surface Inspired by Malaysian Sharks Negaprion Brevi-rostris and Carcharhinus Leucas Riblets. Tribol. Online 2021, 16, 70–80. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, X.; Liu, Y.; Zhan, H.; Liu, Y.; Zhao, L.; Feng, S. Bidirectional Underwater Drag Reduction on Bionic Flounder Two-Tier Structural Surfaces. Biomimetics 2023, 8, 116. https://doi.org/10.3390/biomimetics8010116
He X, Liu Y, Zhan H, Liu Y, Zhao L, Feng S. Bidirectional Underwater Drag Reduction on Bionic Flounder Two-Tier Structural Surfaces. Biomimetics. 2023; 8(1):116. https://doi.org/10.3390/biomimetics8010116
Chicago/Turabian StyleHe, Xixing, Yihe Liu, Haiyang Zhan, Yahua Liu, Lei Zhao, and Shile Feng. 2023. "Bidirectional Underwater Drag Reduction on Bionic Flounder Two-Tier Structural Surfaces" Biomimetics 8, no. 1: 116. https://doi.org/10.3390/biomimetics8010116
APA StyleHe, X., Liu, Y., Zhan, H., Liu, Y., Zhao, L., & Feng, S. (2023). Bidirectional Underwater Drag Reduction on Bionic Flounder Two-Tier Structural Surfaces. Biomimetics, 8(1), 116. https://doi.org/10.3390/biomimetics8010116