


Kinematic Analysis of Bionic Elephant Trunk Robot Based on Flexible Series-Parallel Structure



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Modelling of Flexible Rod
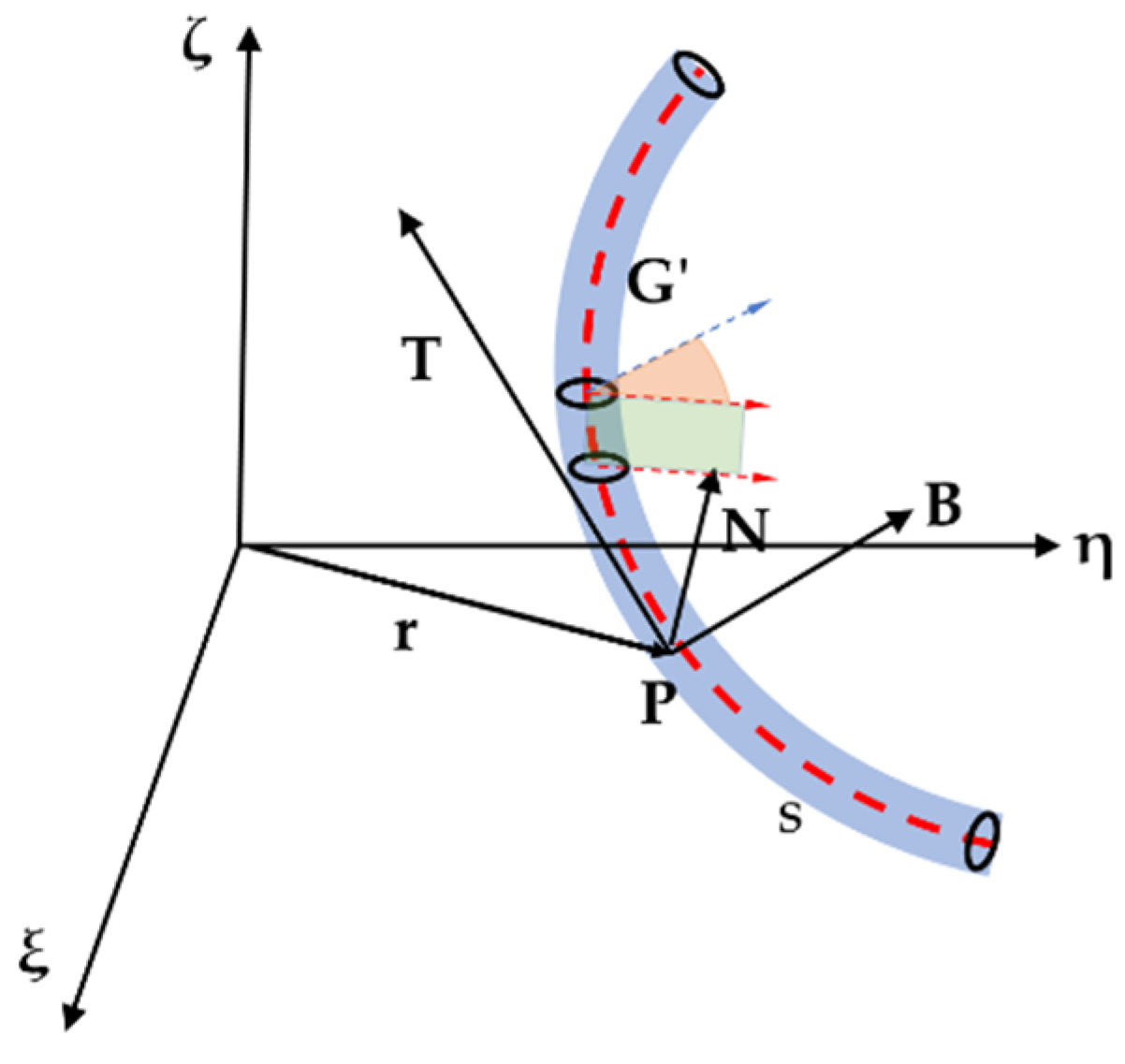
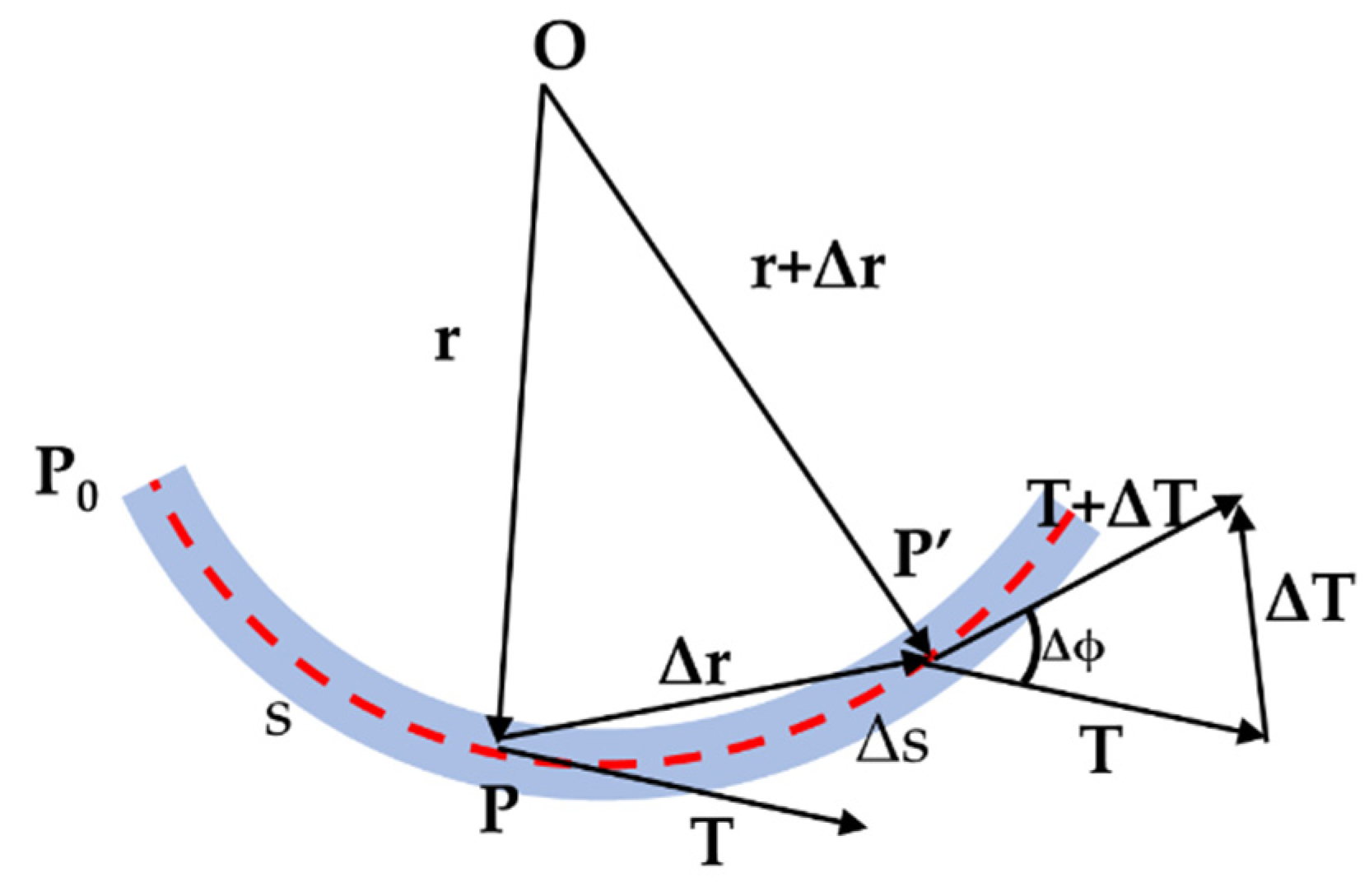
2.1. Geometric Description of The Flexible Rod
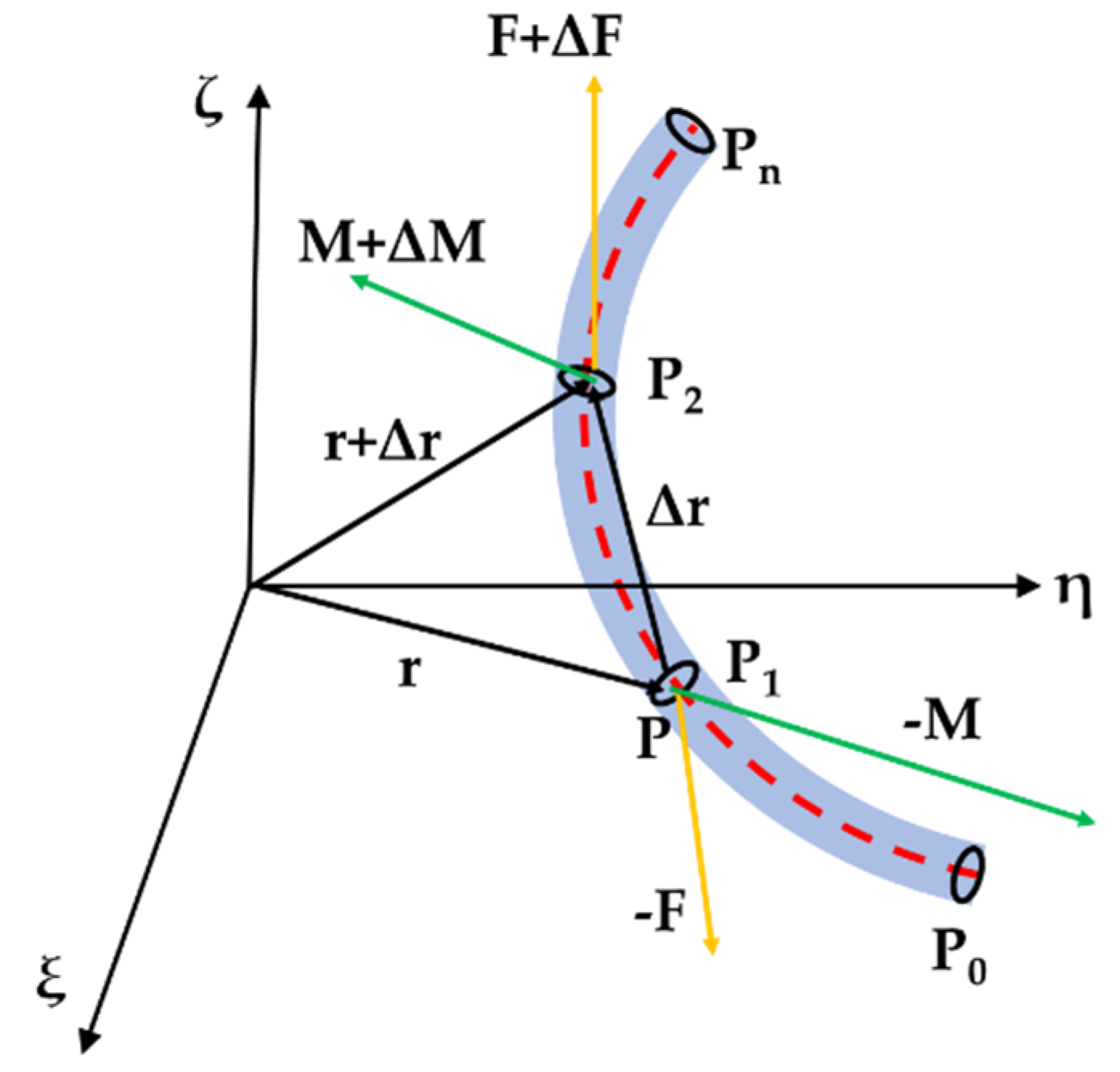
2.2. Static Equilibrium of Flexible Rod
3. Modelling of Single Flexible 6-Dof Parallel Module
3.1. The Boundary Conditions for Forward Kinematics
3.2. The Boundary Conditions for Inverse Kinematics
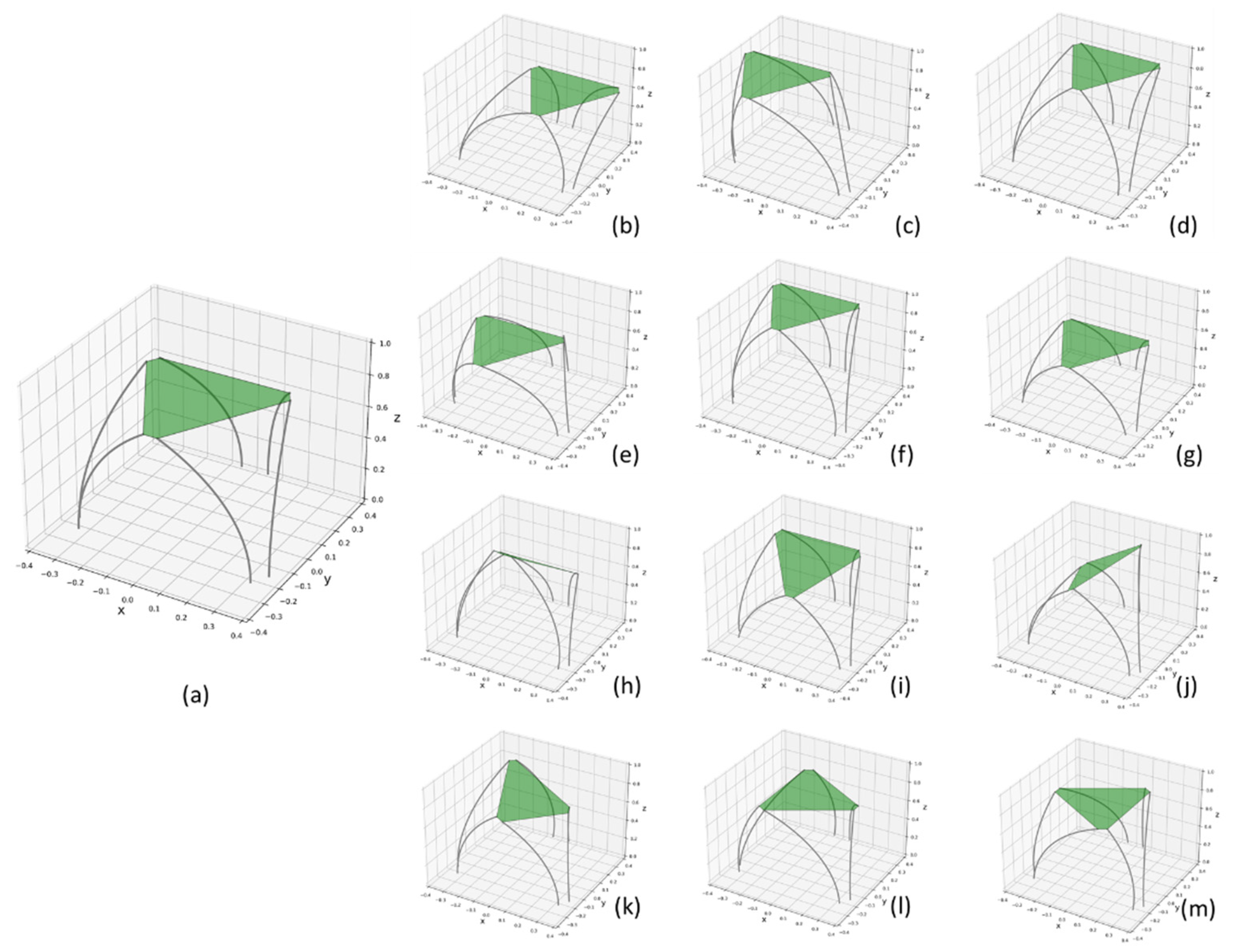
3.3. Smulation of Single Flexible 6-Dof Parallel Module
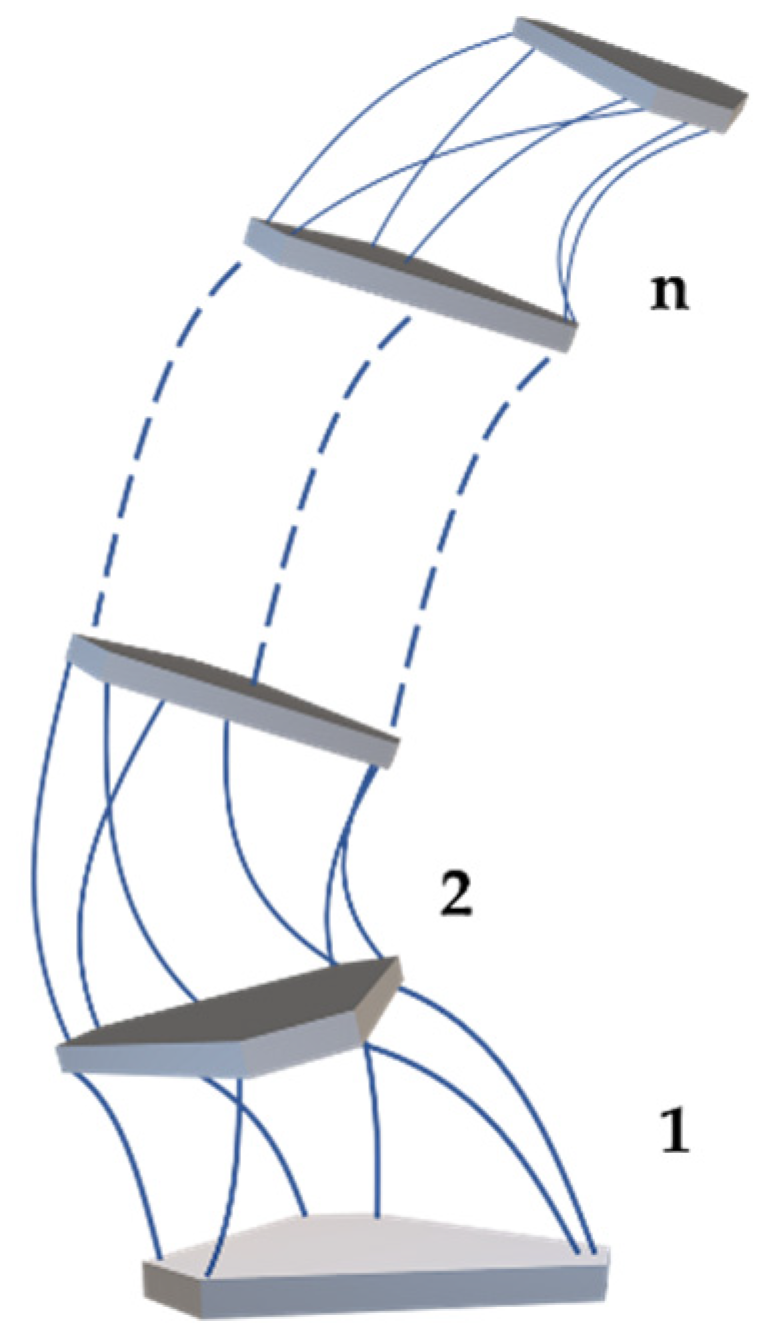
4. Kinematic Modeling of Flexible Series-Parallel Mechanism
- (1)
- Continuum Serial-Parallel Manipulator. A continuous series-parallel robot is composed of several parallel elements but does not contain discrete joints and rigid rods, so its shape is usually characterized by a curve. For the kinematic modeling of this kind of series-parallel robot, the shape curve should be described in space first, and then the pose of each unit on the curve should be determined according to the structural characteristics, and then the kinematic parameters of the mechanism should be derived.
- (2)
- Discrete Serial-Parallel Manipulator having less than or equal to 6-dof. For discrete series-parallel robots, if the joint degrees of freedom are less than or equal to 6, the transformation matrix relative to the root coordinate system or the world coordinate system can be derived according to the position and orientation of the end-effector. Then, the kinematic parameters can be determined according to the structure and geometric constraints of the robot. For the intermediate platforms, it is not necessary to know their specific position and orientation before the solution kinematic. Because of the series and parallel robots with degrees of freedom ≤6, once the position and orientation of the end-effector are determined, each intermediate platform can be uniquely determined. In other words, the transformation matrix of the end-effector contains the kinematic information of each intermediate platform, but these parameters need to be derived by using the structural and geometric constraints of the robot.
- (3)
- Discrete Serial-Parallel Manipulator having greater than 6-dof. For discrete series-parallel robots, if the joint degrees of freedom are greater than six, it means that the robot has redundant degrees of freedom, and the displacement of each joint cannot be completely determined according to the orientation of the end-effector. Therefore, for such discrete series-parallel robots, the inverse kinematics should be solved by giving or solving the orientation of intermediate platforms first. The forward kinematics also need to determine each intermediate platform in turn.
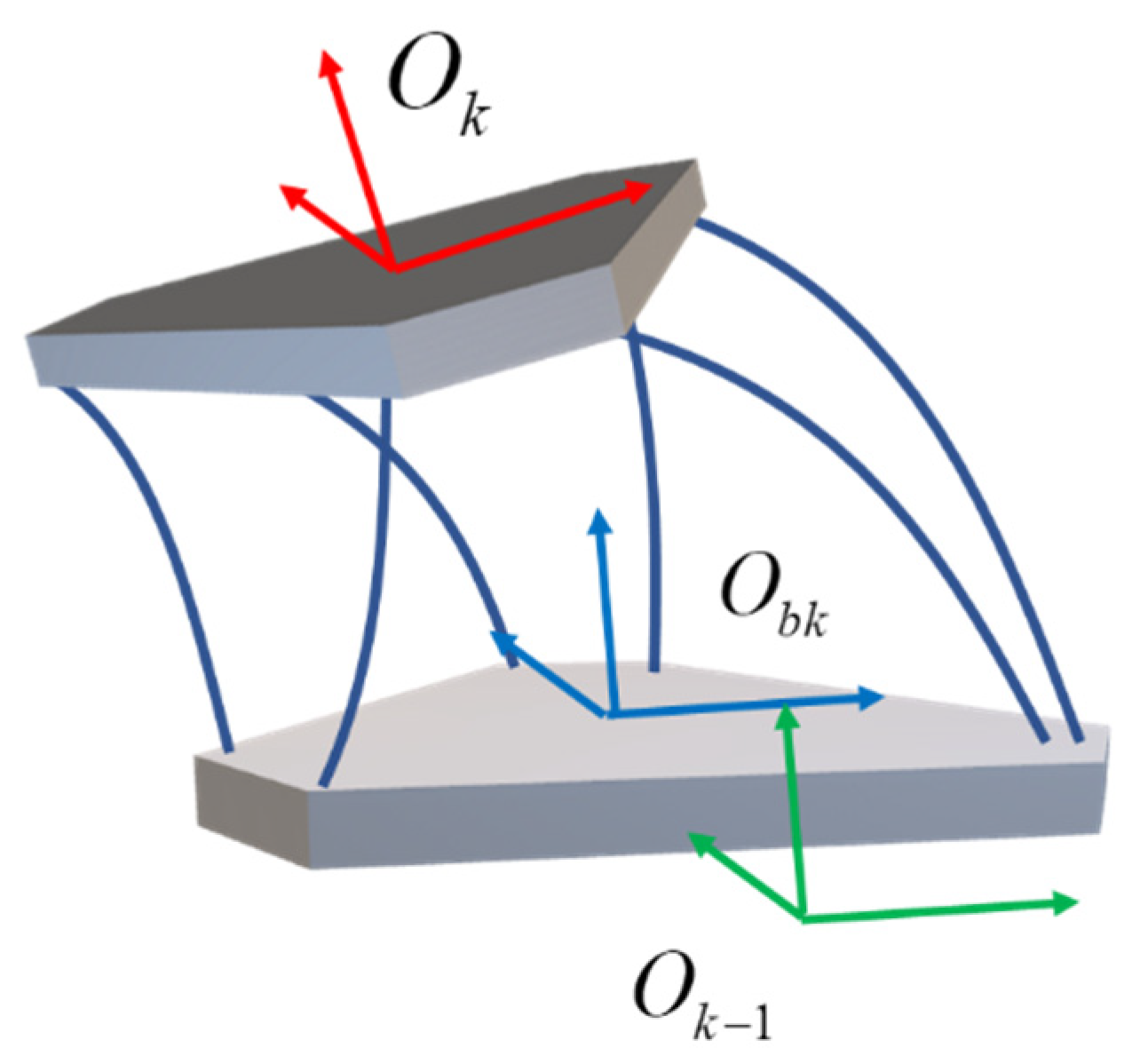
4.1. The Kinematic Model of The Module K
4.2. Forward Kinematics Analysis of Flexible Series-Parallel Robot
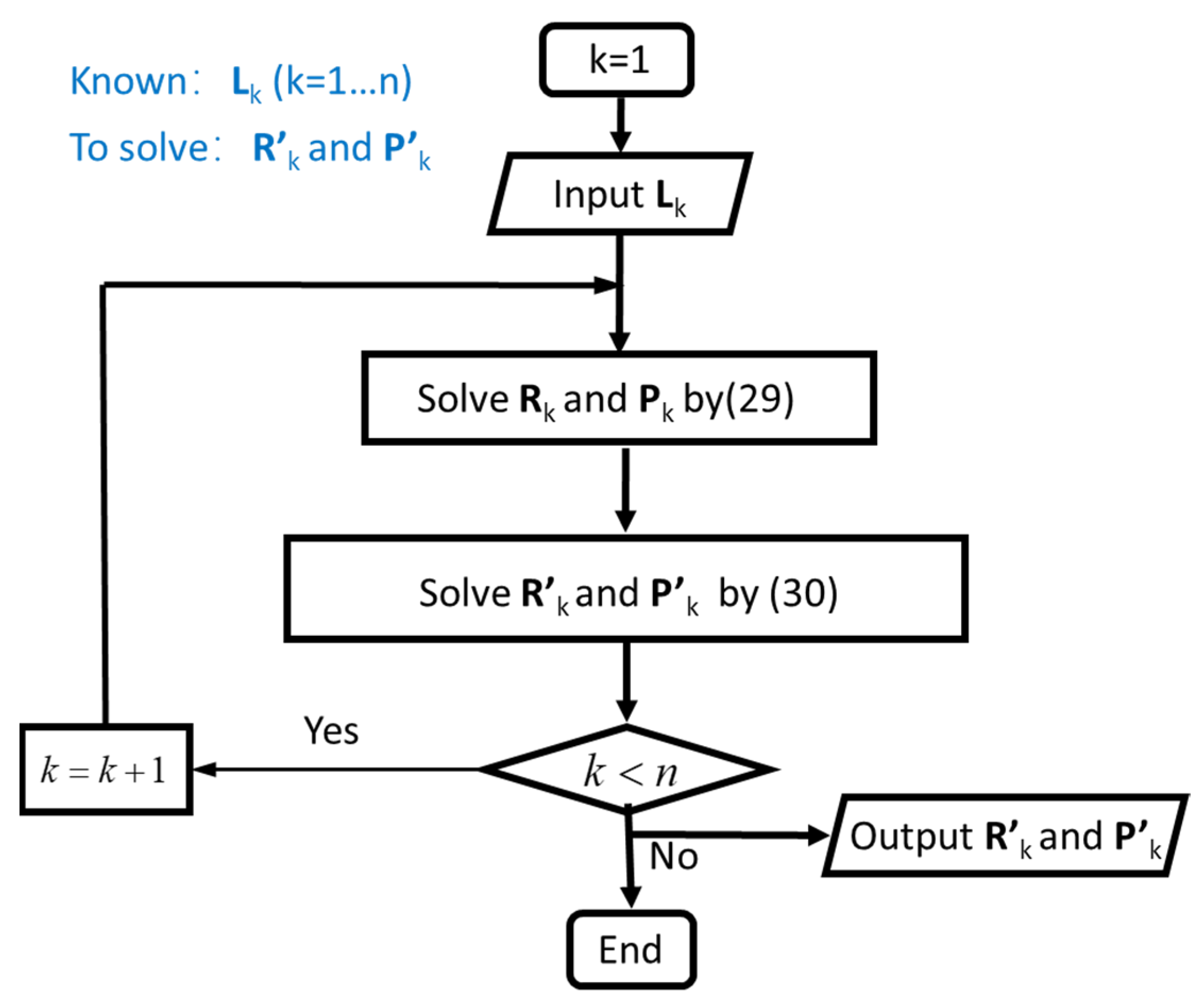
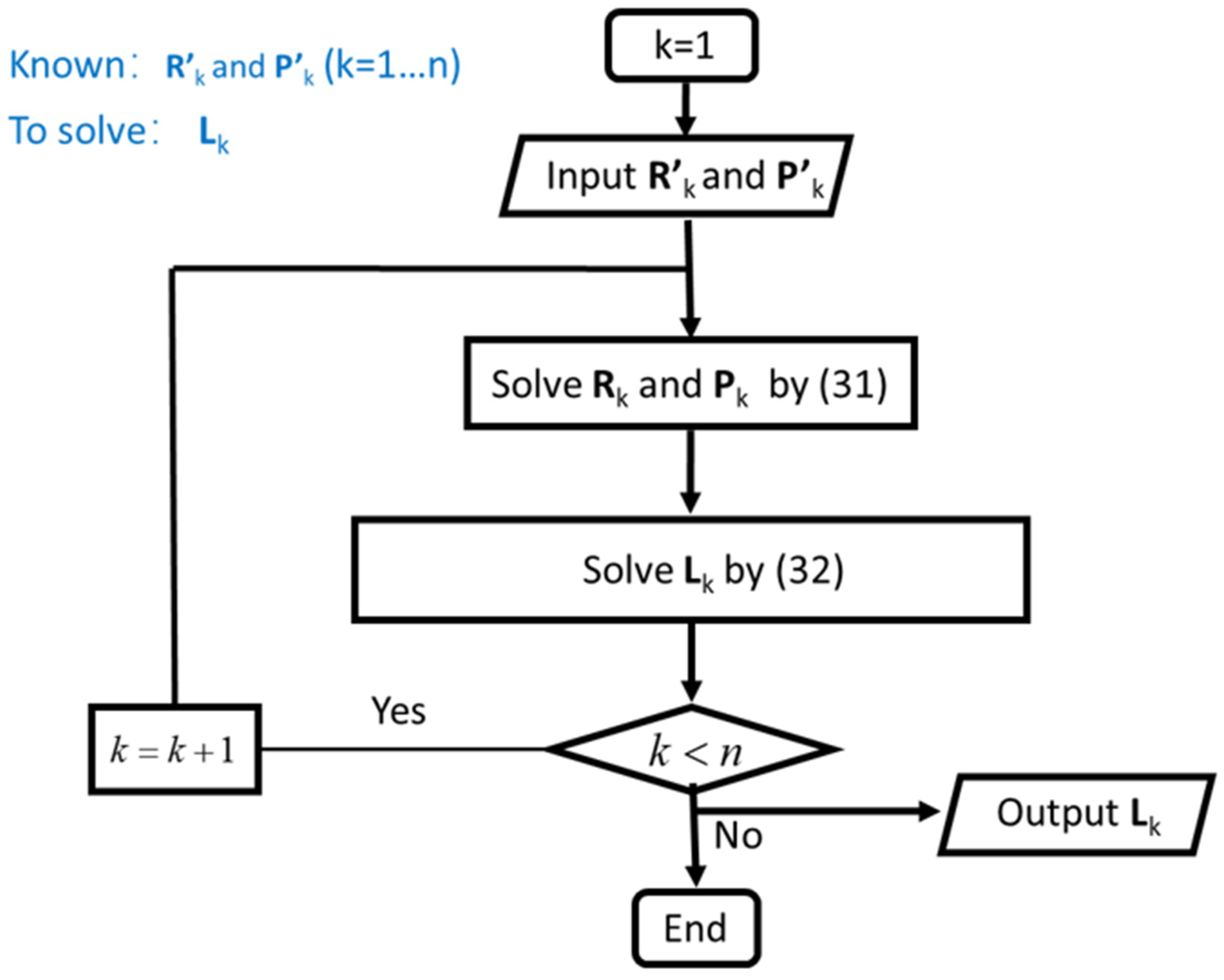
4.3. Inverse Kinematics Analysis of Flexible Series-Parallel Robot
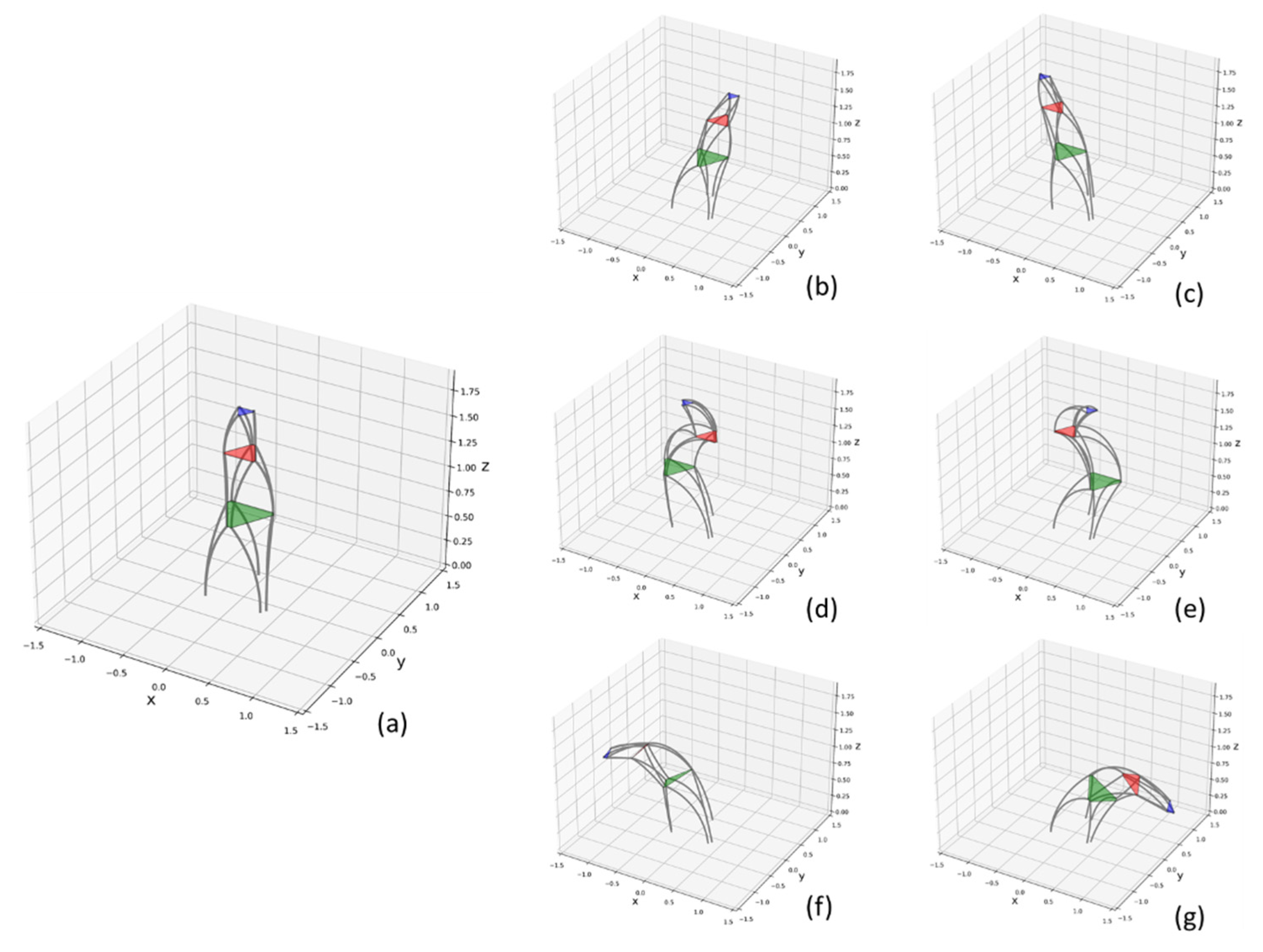
4.4. Simulation
5. Conclusions
- (1)
- A flexible rod works well in a flexible series-parallel structure as verified in simulation. In addition, Cosserat theory is an effective method in kinematic analysis of a flexible series-parallel structure and a bionic elephant trunk robot.
- (2)
- Finish the kinematic analysis of a flexible parallel module which makes it a reliable section to consist of a trunk robot.
- (3)
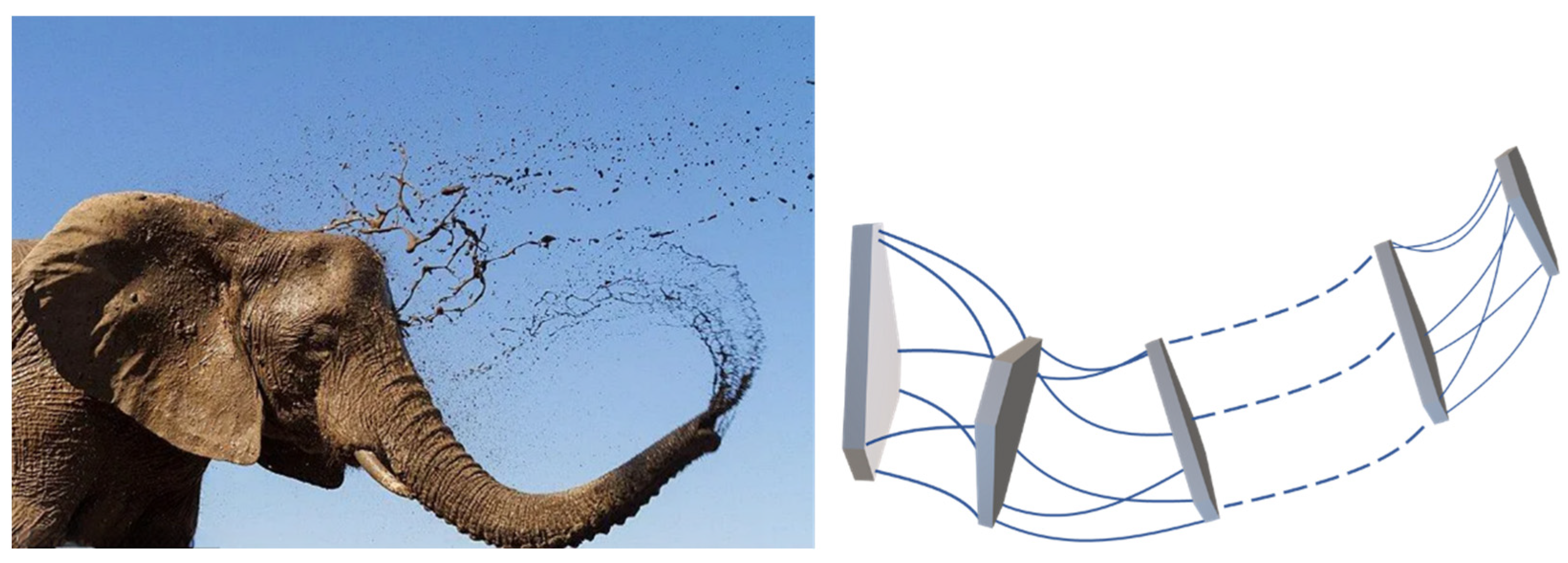
- The trunk robot proposed in this work could closely imitate an elephant’s behavior, such as translating, presenting s-shaped orientation, and bending.
- (4)
- To get better flexibility, more modules should be connected.
6. Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Pfeifer, R.; Lungarella, M.; Iida, F. Self-Organization, Embodiment, and Biologically Inspired Robotics. Science 2007, 318, 1088–1093. [Google Scholar] [CrossRef] [PubMed]
- Moran, M.E. Evolution of robotic arms. J. Robot. Surg. 2007, 1, 103–111. [Google Scholar] [CrossRef] [PubMed]
- Calamia, J. Artifacts from the first 2000 years of computing. IEEE Spectr. 2011, 48, 34–40. [Google Scholar] [CrossRef]
- Anderson, V.C.; Horn, R.C. Tensor arm manipulator design. ASME Trans. 67-DE-57. 1967, 1–12. [Google Scholar]
- Hannan, M.W.; Walker, I.D. The “elephant trunk” manipulator, design and implementation. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Como, Italy, 8–12 July 2001. [Google Scholar]
- Gravagne, I.A.; Walker, I.D. Manipulability, force, and compliance analysis for planar continuum manipulators. IEEE Trans. Robot. Autom. 2002, 18, 263–273. [Google Scholar] [CrossRef] [PubMed]
- Gravagne, I.A.; Rahn, C.D.; Walker, I.D. Large deflection dynamics and control for planar continuum robots. IEEE/ASME Trans. Mechatron. 2003, 8, 299–307. [Google Scholar] [CrossRef]
- Mcmahan, W.; Jones, B.A.; Walker, I.D. Design and implementation of a multi-section continuum robot: Air-Octor. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005. [Google Scholar]
- Jones, B.A.; Walker, I.D. Practical Kinematics for Real-Time Implementation of Continuum Robots. IEEE Trans. Robot. 2007, 22, 1087–1099. [Google Scholar] [CrossRef]
- Neppalli, S.; Jones, B.A. Design, construction, and analysis of a continuum robot. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October 2007–2 November 2007. [Google Scholar]
- Simaan, N.; Taylor, R.; Flint, P. A dexterous system for laryngeal surgery. In Proceedings of the IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April 2004–1 May 2004. [Google Scholar]
- Xu, K.; Zhao, J.; Fu, M. Development of the SJTU Unfoldable Robotic System (SURS) for Single Port Laparoscopy. IEEE/ASME Trans. Mechatron. 2015, 20, 2133–2145. [Google Scholar] [CrossRef]
- Xu, K.; Goldman, R.E.; Ding, J. System Design of an Insertable Robotic Effector Platform for Single Port Access (SPA) Surgery. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009. [Google Scholar]
- Simaan, N.; Xu, K.; Wei, W. Design and Integration of a Telerobotic System for Minimally Invasive Surgery of the Throat. Int. J. Robot. Res. 2009, 28, 1134–1153. [Google Scholar] [CrossRef] [PubMed]
- Choi, D.G.; Yi, B.J.; Kim, W.K. Design of a spring backbone micro endoscope. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots & Systems, San Diego, CA, USA, 29 October 2007–2 November 2007. [Google Scholar]
- Festo Rebot. Available online: https://www.festo.com.cn/group/zh/cms/10241.htm (accessed on 2 December 2022).
- Nguyen, T.D.; Burgner-Kahrs, J. A tendon-driven continuum robot with extensible sections. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Hamburg, Germany, 28 September 2015–2 October 2015. [Google Scholar]
- Li, L.; Ma, S.; Tokuda, I.; Asano, F.; Nokata, M.; Tian, Y.; Du, L. Generation of Efficient Rectilinear Gait Based on Dynamic Morphological Computation and Its Theoretical Analysis. IEEE Robot. Autom. Lett. 2021, 6, 841–848. [Google Scholar] [CrossRef]
- Jia, Y.; Ma, S. A Coach-Based Bayesian Reinforcement Learning Method for Snake Robot Control. IEEE Robot. Autom. Lett. 2021, 6, 2319–2326. [Google Scholar] [CrossRef]
- Ren, C.; Ding, Y.; Ma, S. A structure-improved extended state observer based control with application to an omnidirectional mobile robot. ISA Trans. 2020, 101, 335–345. [Google Scholar] [CrossRef] [PubMed]
- Zhang, A.; Ma, S.; Li, B.; Wang, M.; Chang, J.; Yu, H.; Liu, J.; Liu, L.; Ju, Z.; Liu, Y.; et al. Parameter Optimization of Eel Robot Based on NSGA-II Algorithm. In Proceedings of the Intelligent Robotics and Applications (ICIRA 2019), Shenyang, China, 8–11 August 2019; Volume 11742, pp. 3–15. [Google Scholar]
- Goodding, J.C.; Gregory, M.; Coombs, D.M. Dynamics of cable harnesses on large precision structures. In Proceedings of the 48th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Honolulu, HI, USA, 23–26 April 2007; pp. 1–4. [Google Scholar]
- Liu, Y. Nonlinear Mechanics of Thin Elastic Rod: Theoretical Basis of Mechanical; Tsinghua University Press: Beijing, China, 2008. [Google Scholar]
- Zhan, K. Research on Assembly Simulation Technology of Flexible Cable Harness Based on Cosserat Elastic Rod Model. Master’s Thesis, Nanjing University of Aeronautics and Astronautics, Nanjign, China, 2018. [Google Scholar]
- Zhang, X.; Chan, F.K.; Parthasarathy, T.; Gazzola, M. Modeling and simulation of complex dynamic musculoskeletal architectures. Nat. Commun. 2019, 10, 4825. [Google Scholar] [CrossRef] [PubMed]
- Gazzola, D.; McCormick, M. Forward and inverse problems in the mechanics of soft filaments. R. Soc. Open Sci. 2018, 5, 171628. [Google Scholar] [CrossRef]
- PyElastica: A Computational Framework for Cosserat Rod Assemblies. Available online: https://github.com/GazzolaLab/PyElastica (accessed on 2 December 2022).










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, Q.; Wang, P.; Wang, Y.; Xia, X.; Li, S. Kinematic Analysis of Bionic Elephant Trunk Robot Based on Flexible Series-Parallel Structure. Biomimetics 2022, 7, 228. https://doi.org/10.3390/biomimetics7040228
Huang Q, Wang P, Wang Y, Xia X, Li S. Kinematic Analysis of Bionic Elephant Trunk Robot Based on Flexible Series-Parallel Structure. Biomimetics. 2022; 7(4):228. https://doi.org/10.3390/biomimetics7040228
Chicago/Turabian StyleHuang, Qitao, Peng Wang, Yuhao Wang, Xiaohua Xia, and Songjing Li. 2022. "Kinematic Analysis of Bionic Elephant Trunk Robot Based on Flexible Series-Parallel Structure" Biomimetics 7, no. 4: 228. https://doi.org/10.3390/biomimetics7040228
APA StyleHuang, Q., Wang, P., Wang, Y., Xia, X., & Li, S. (2022). Kinematic Analysis of Bionic Elephant Trunk Robot Based on Flexible Series-Parallel Structure. Biomimetics, 7(4), 228. https://doi.org/10.3390/biomimetics7040228