Design, Manufacturing, and Testing of a New Concept for a Morphing Leading Edge using a Subsonic Blow Down Wind Tunnel


Abstract
:1. Introduction
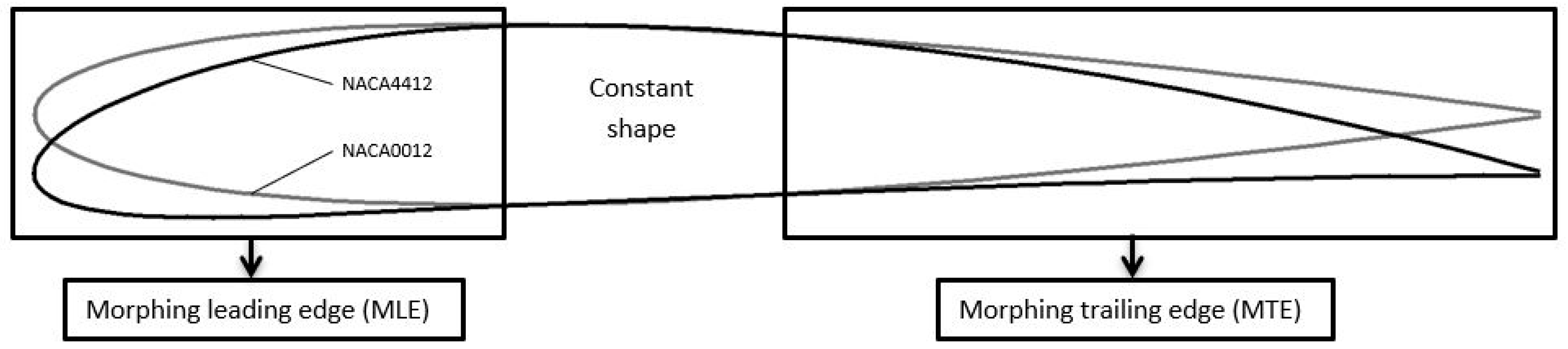
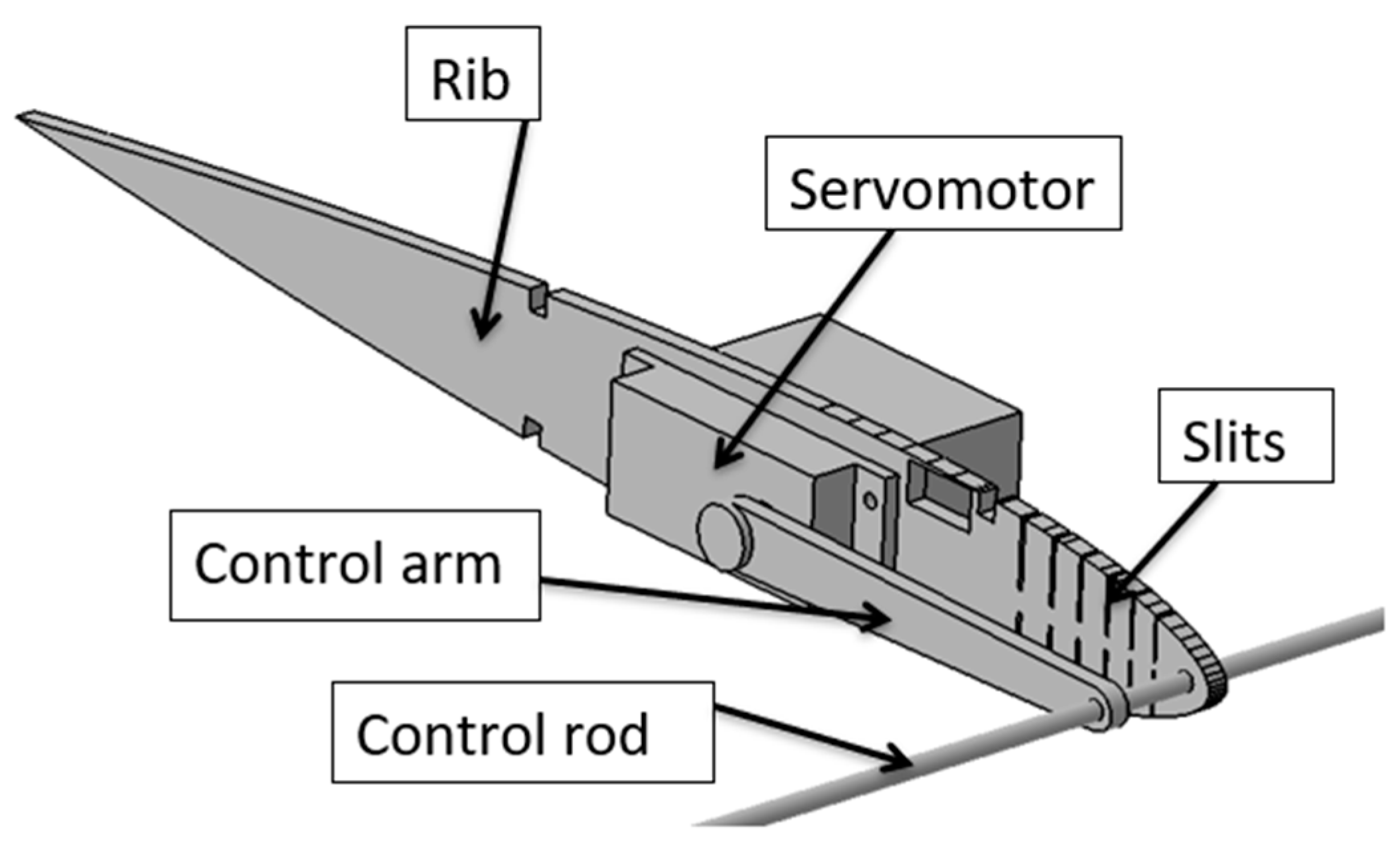
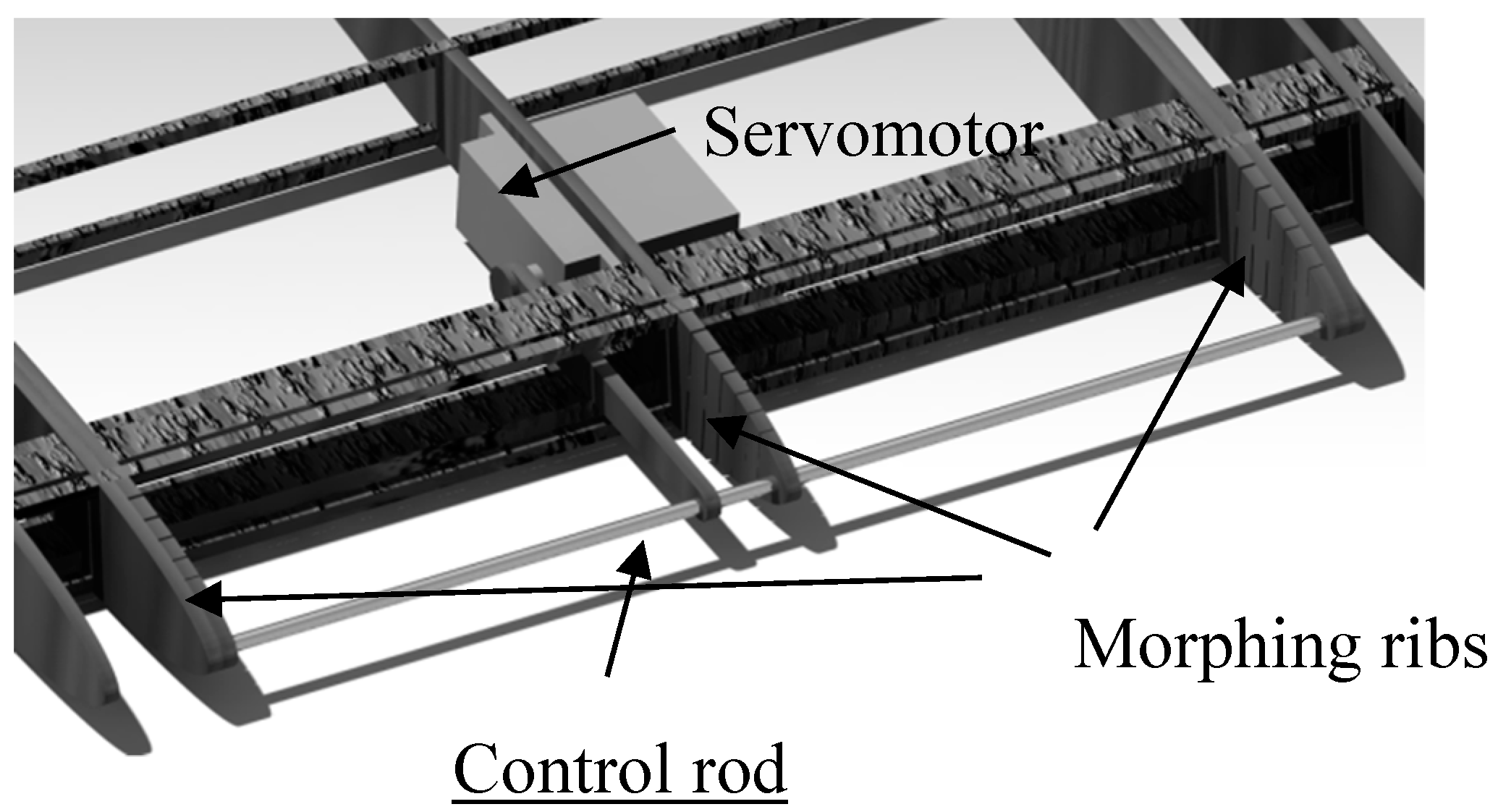
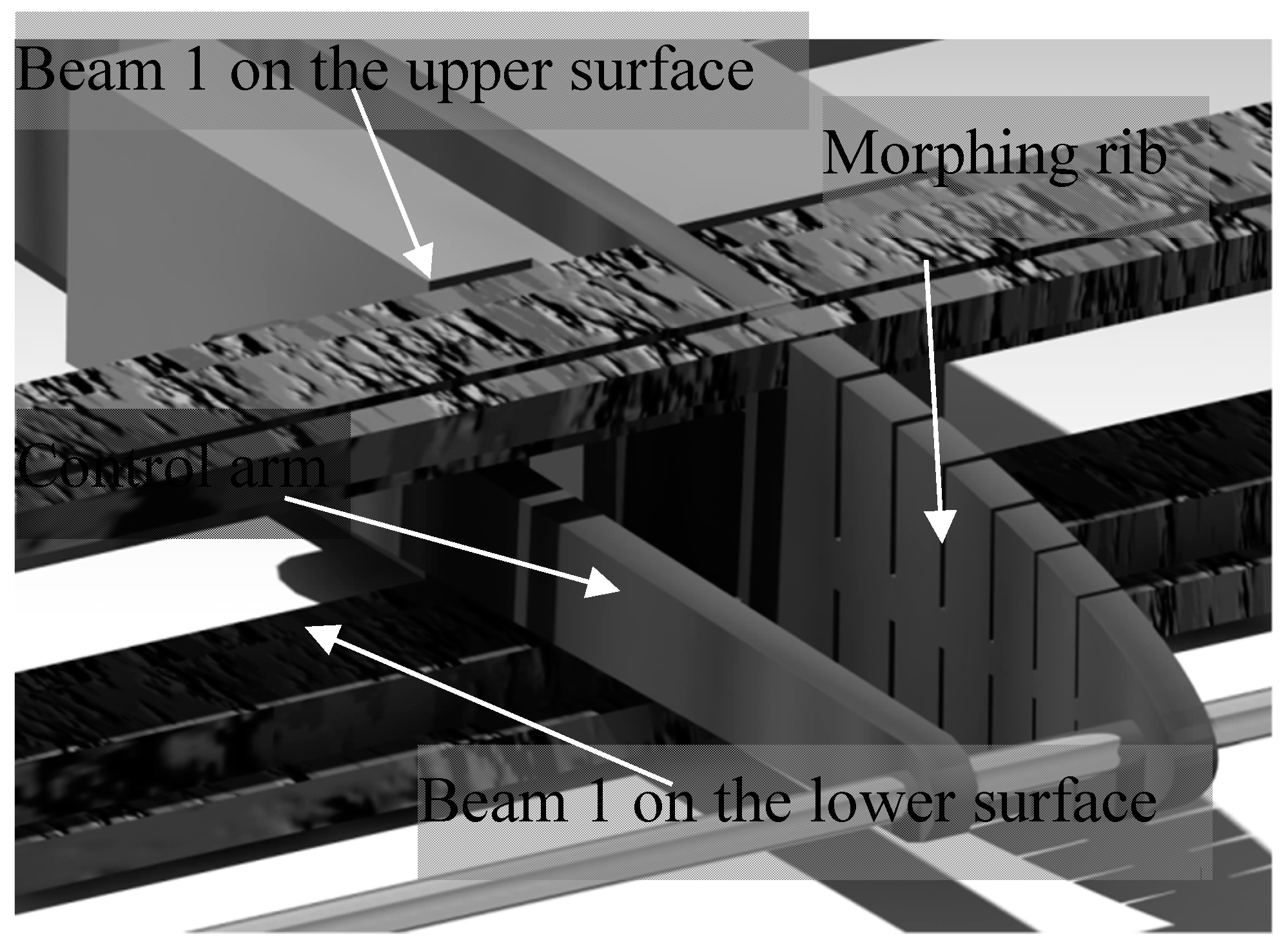
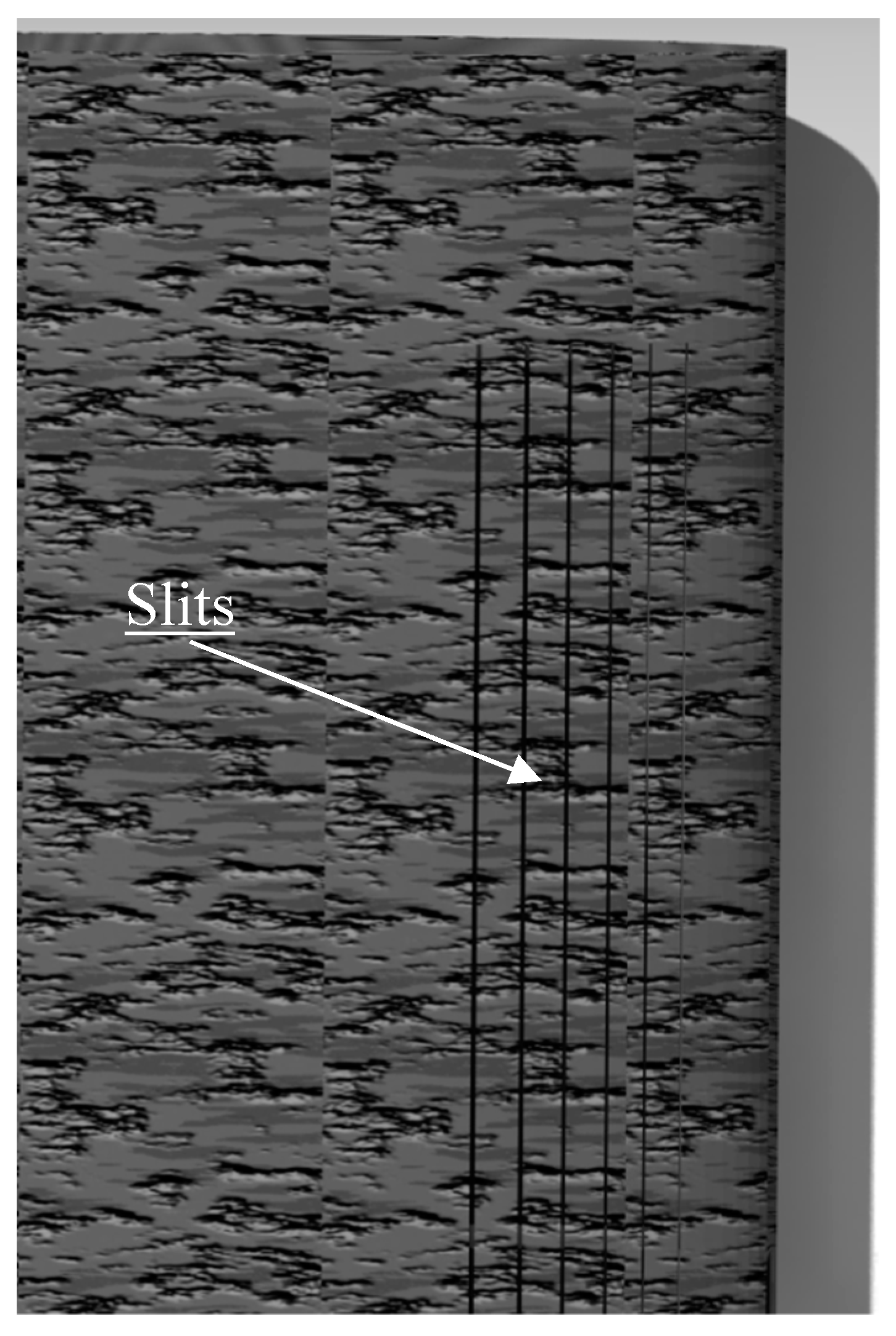
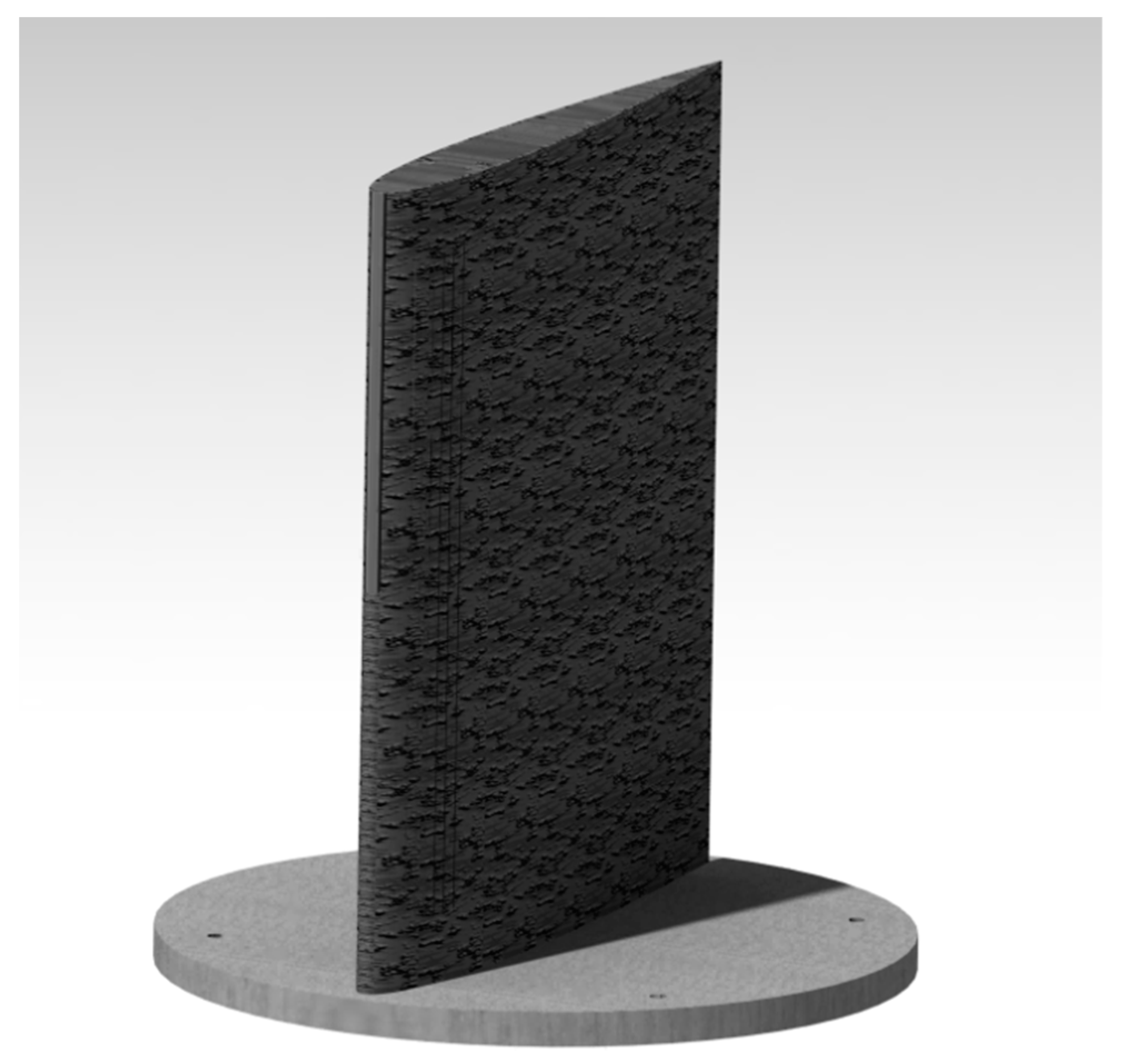
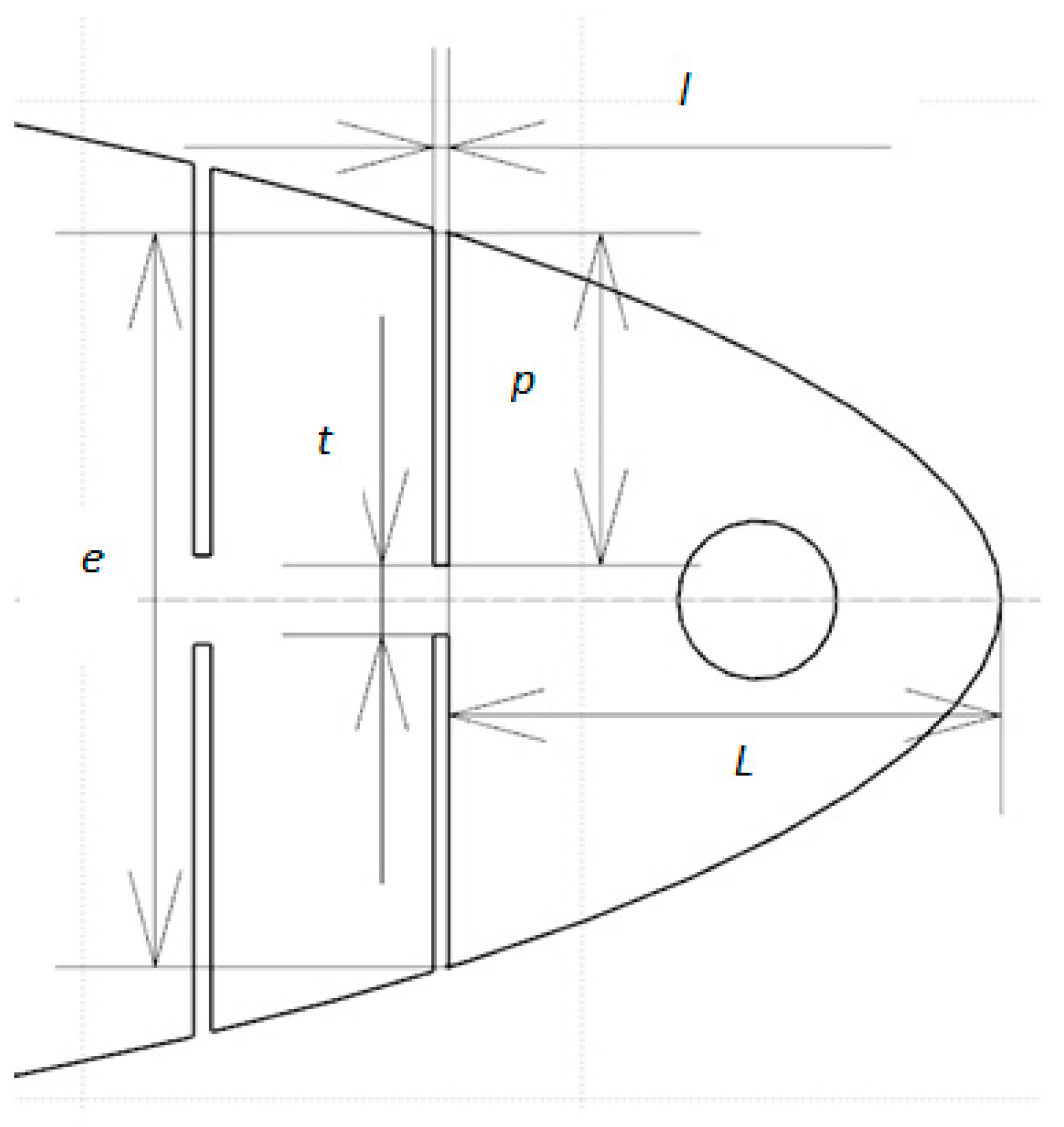
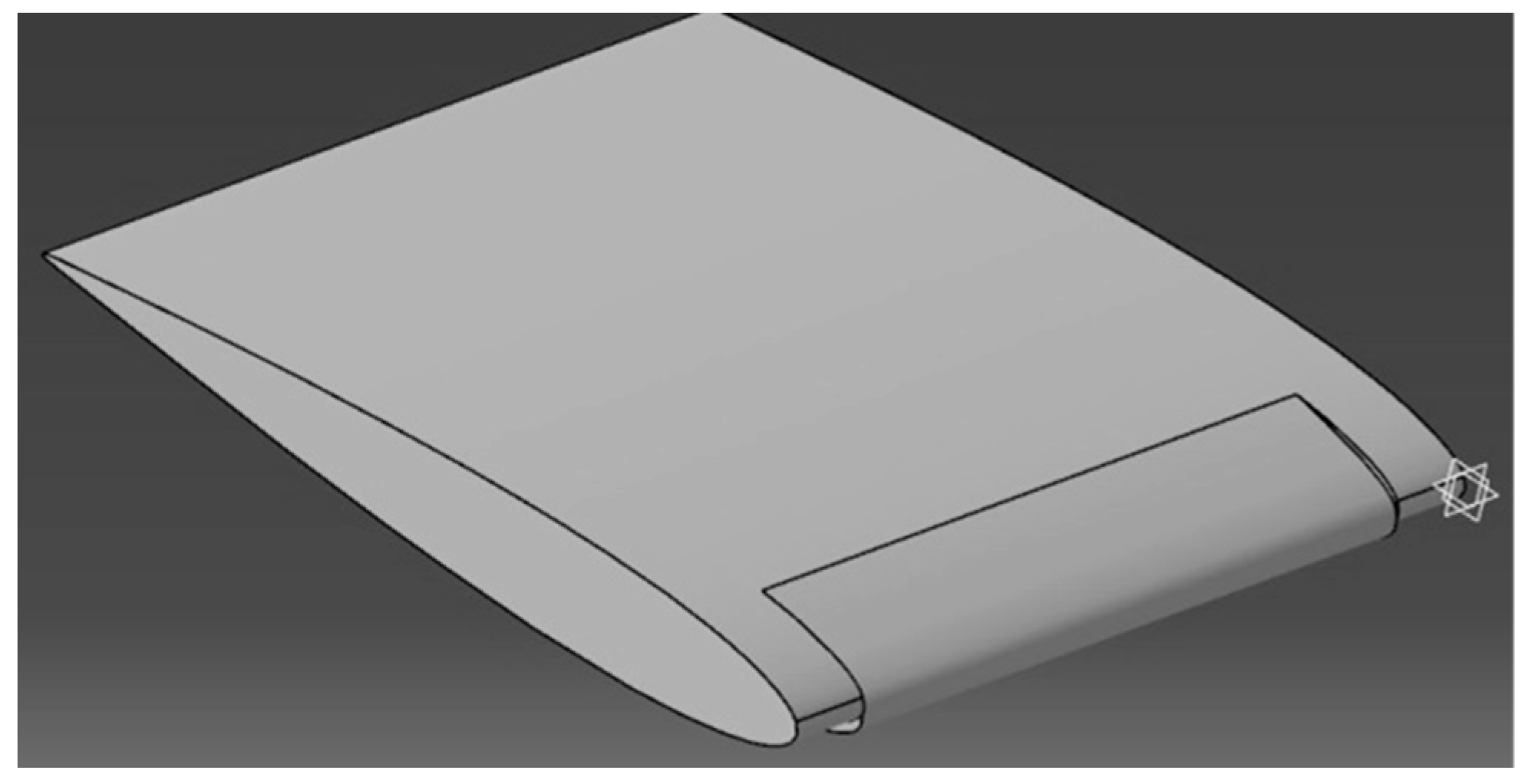
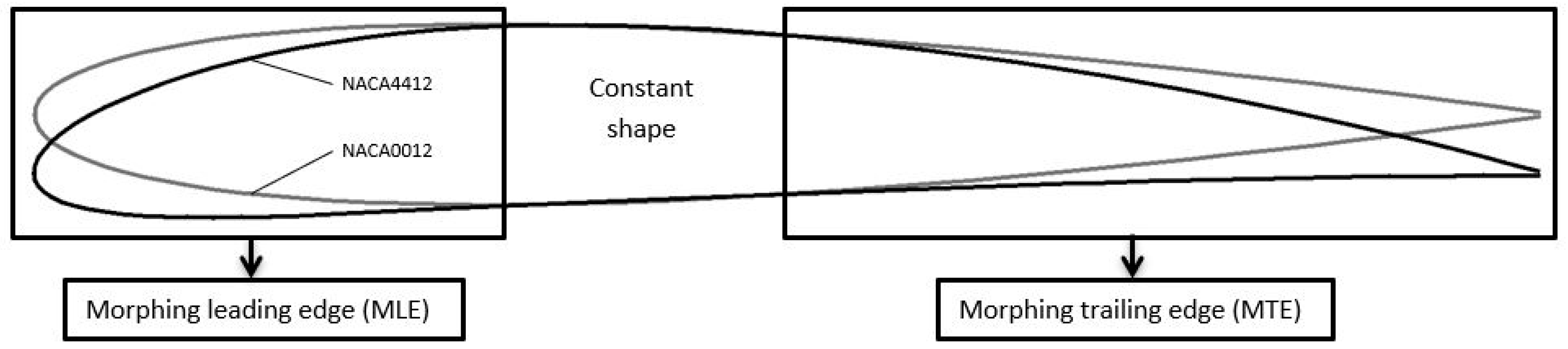
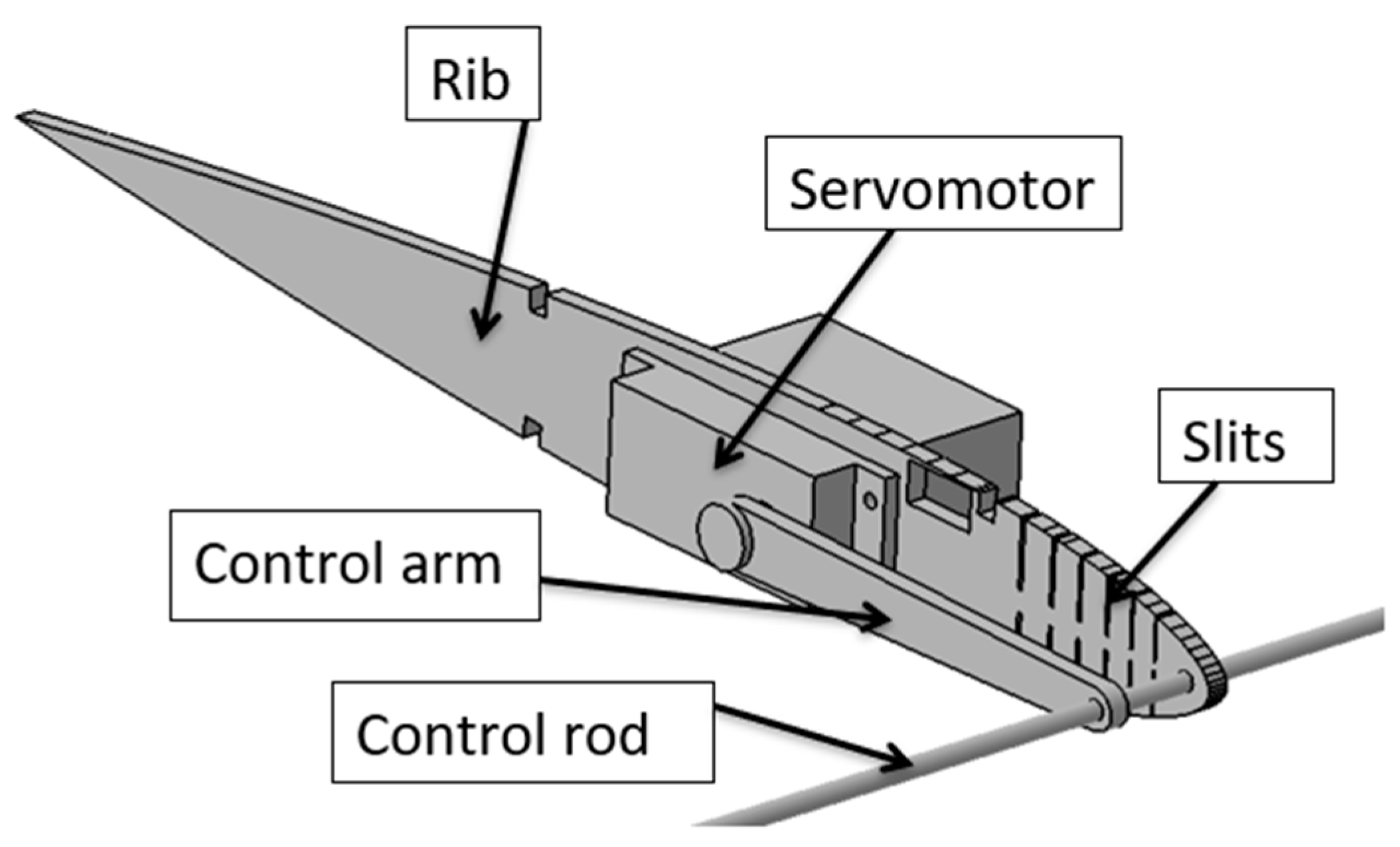
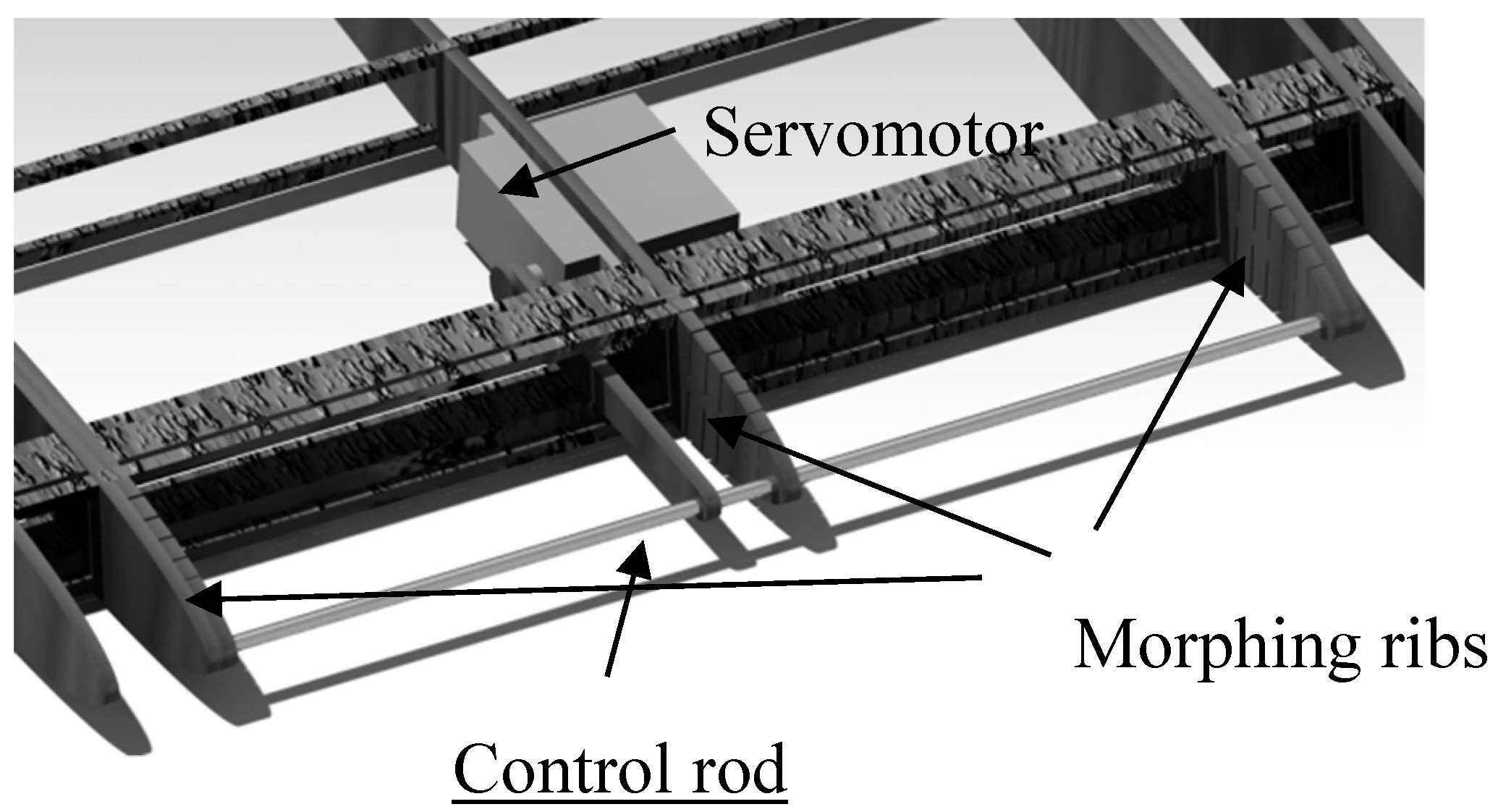
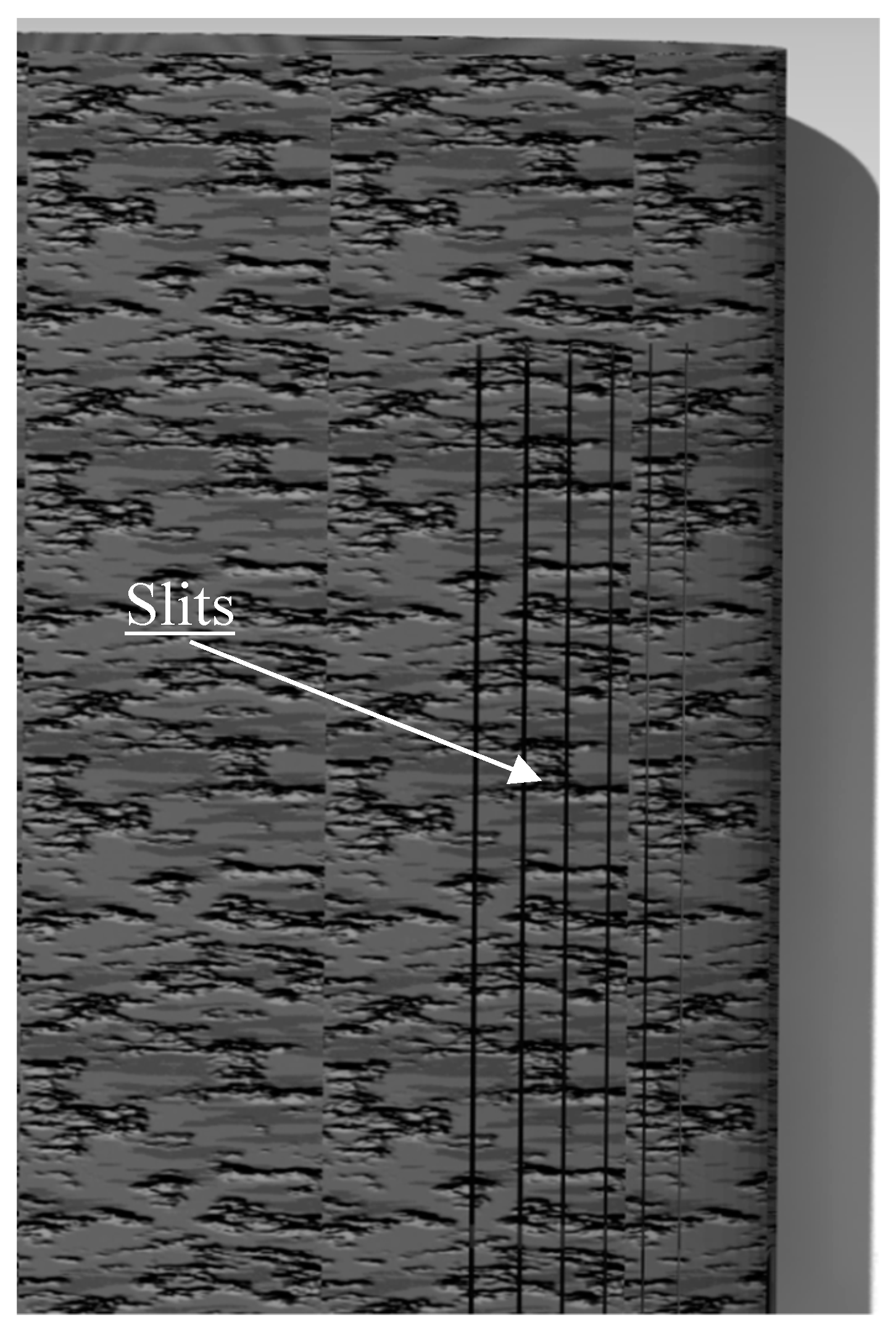
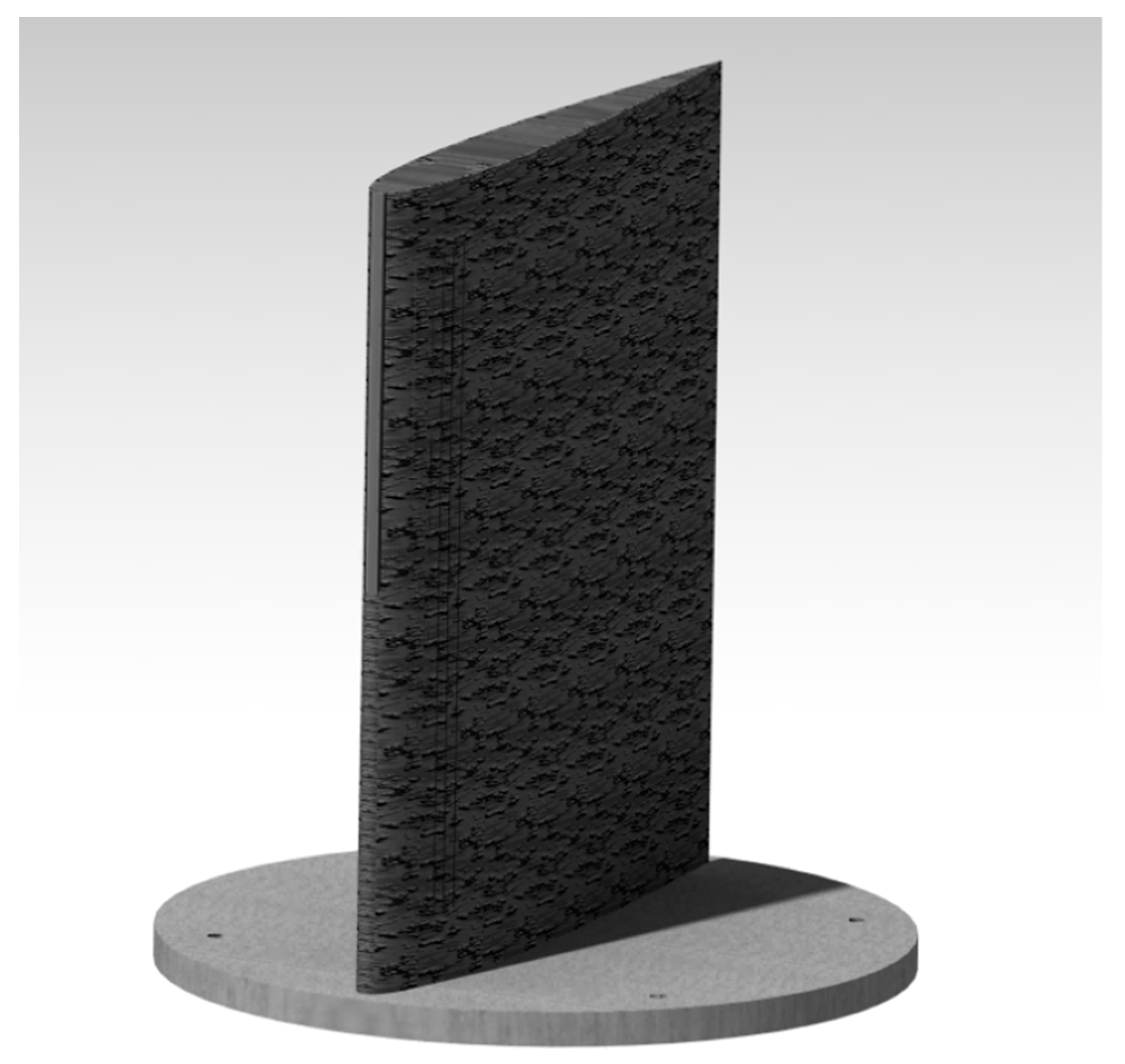
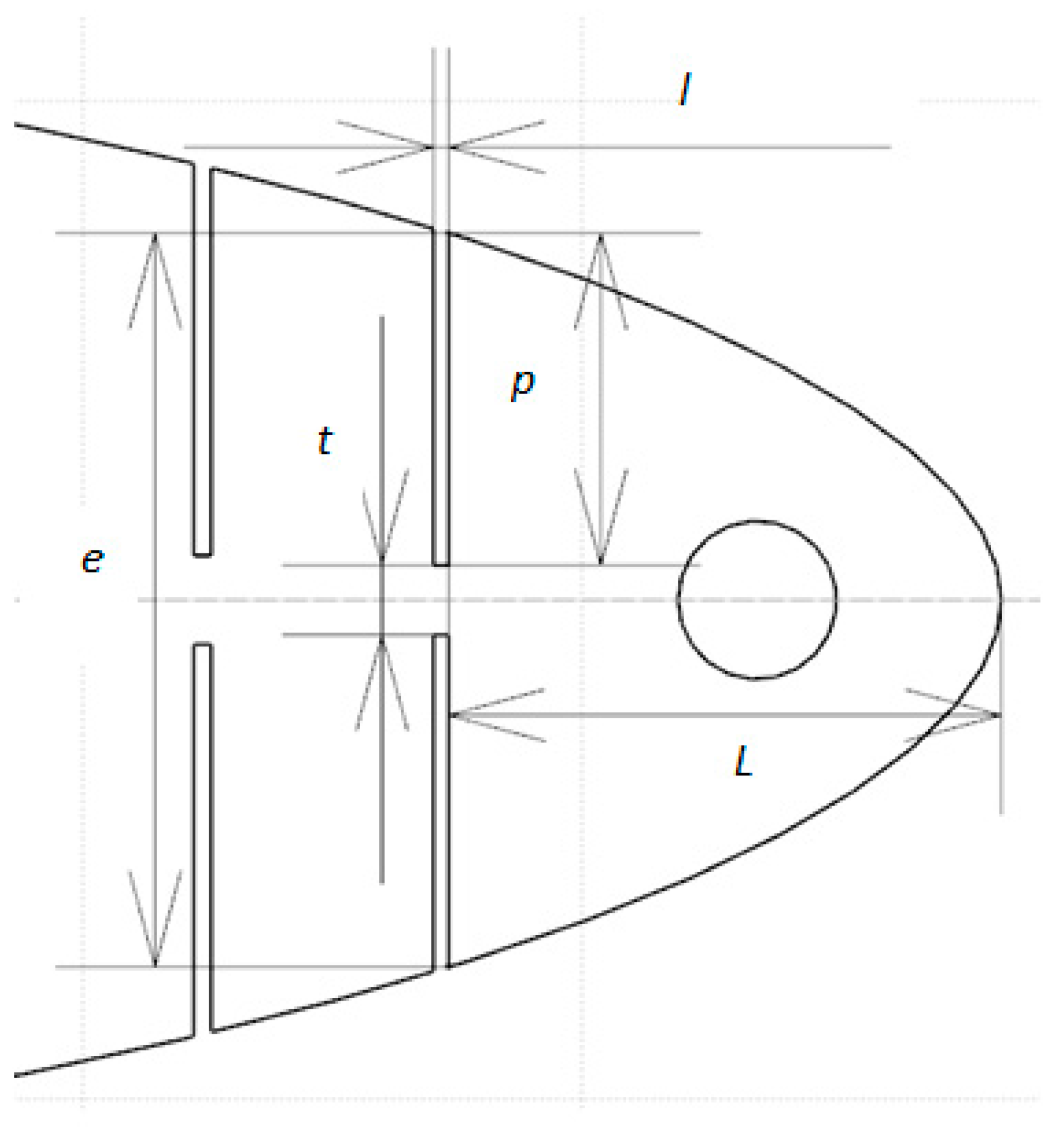
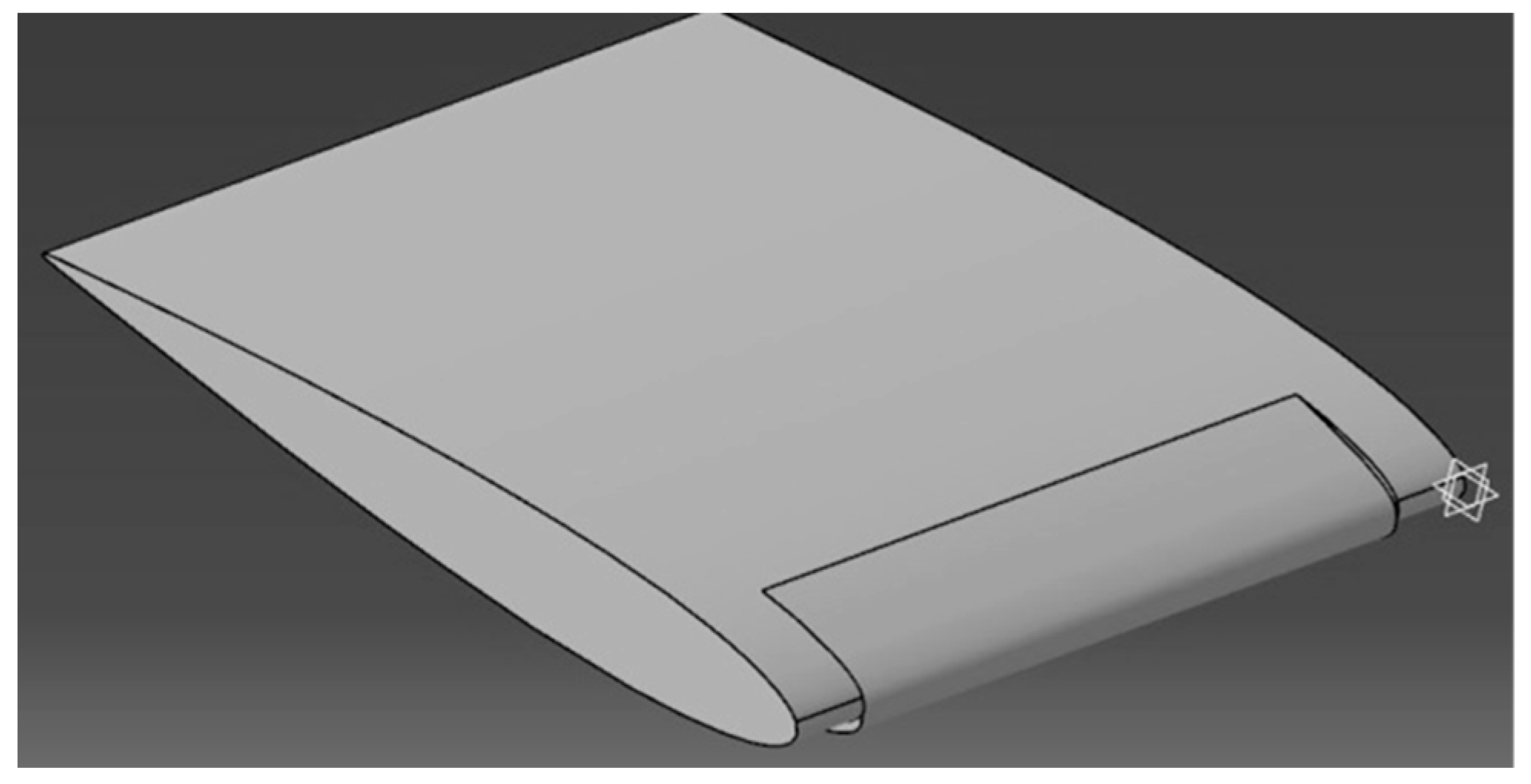
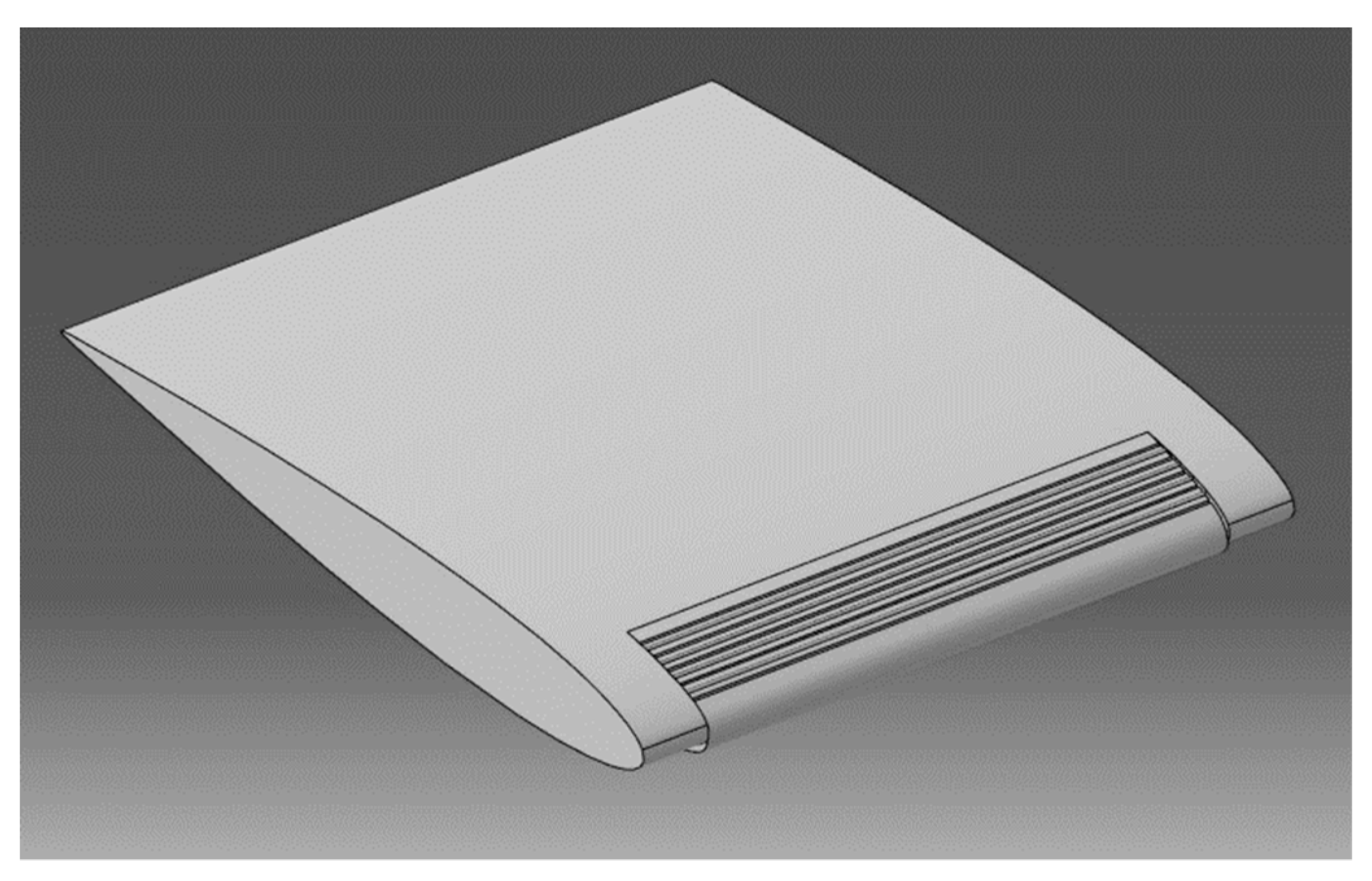
2. Design of the MLE
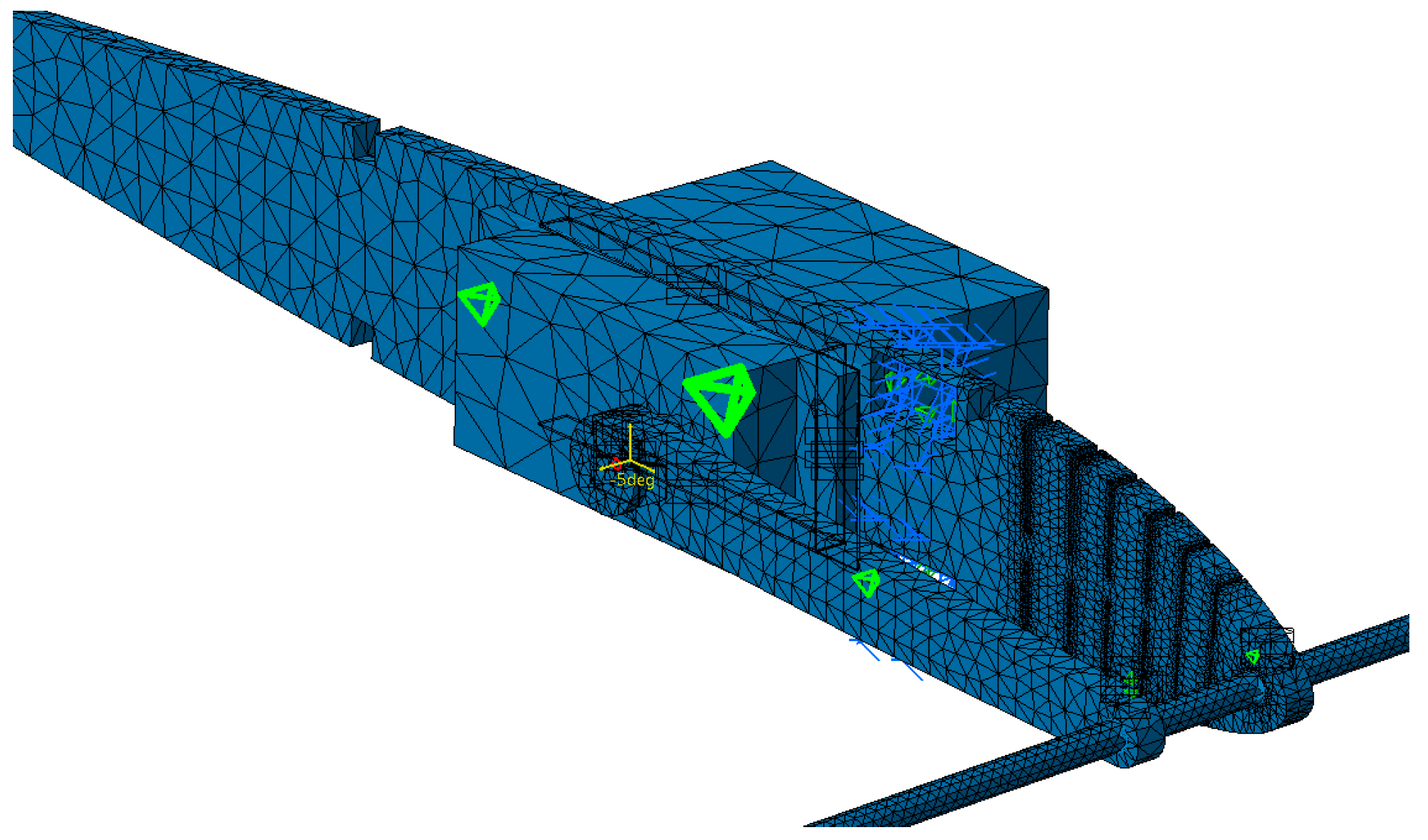
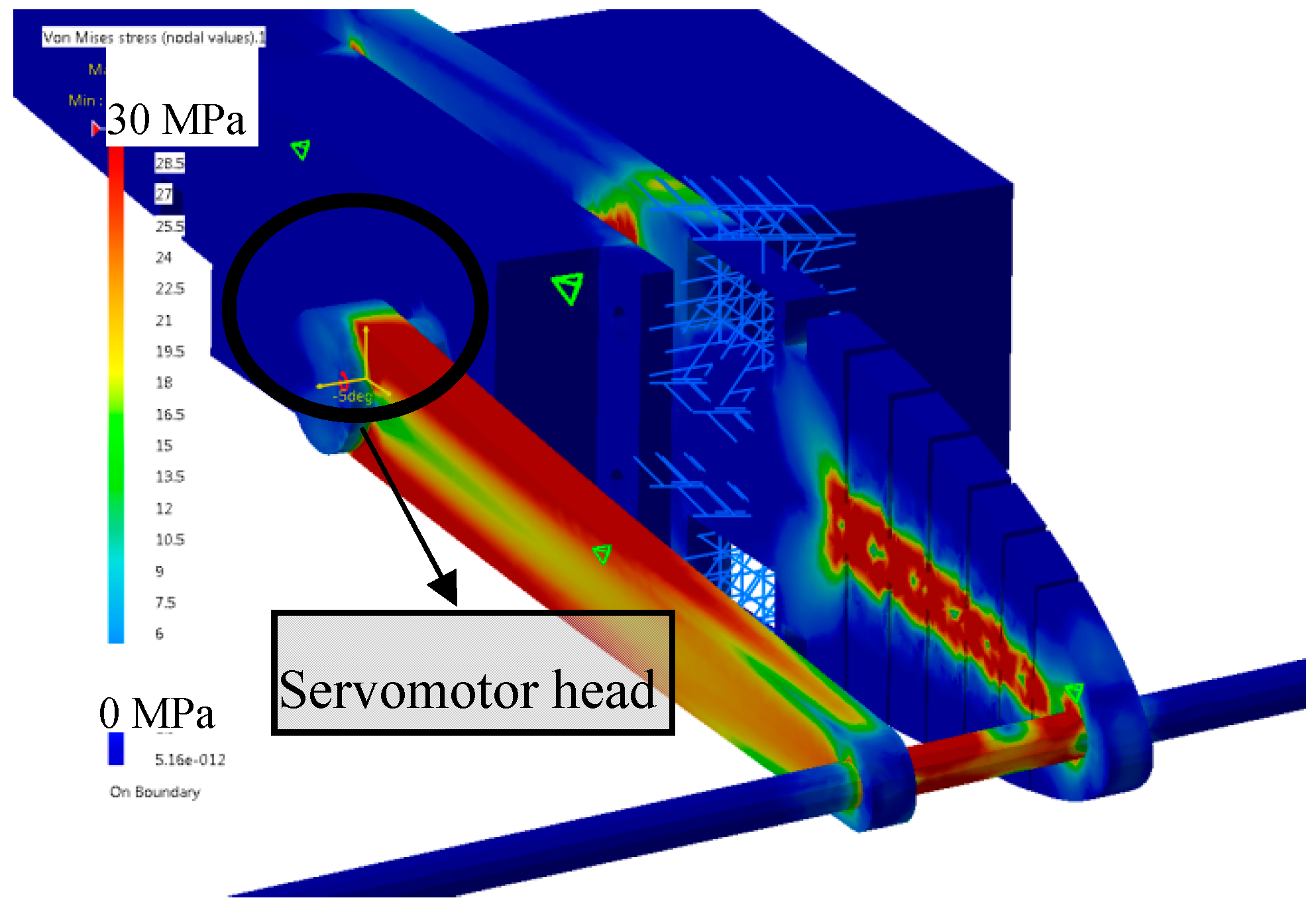
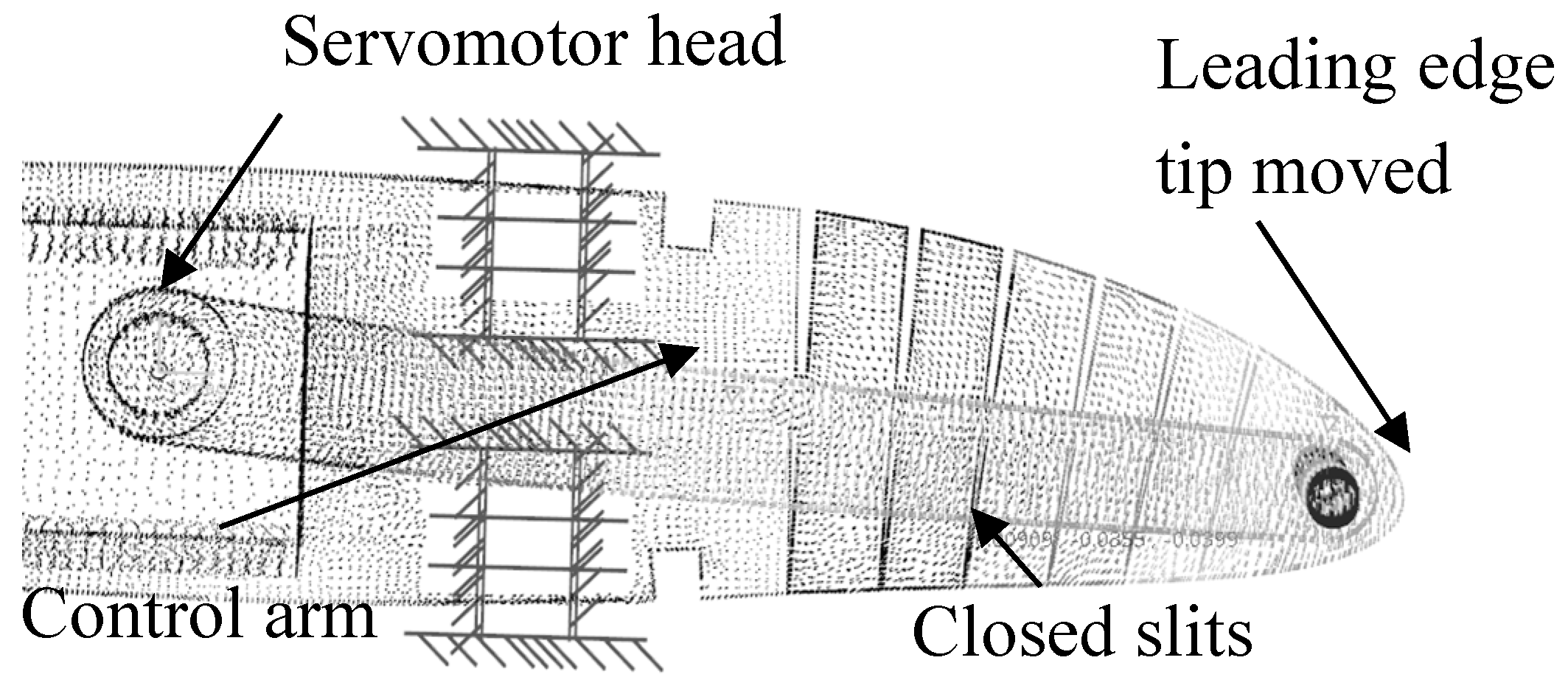
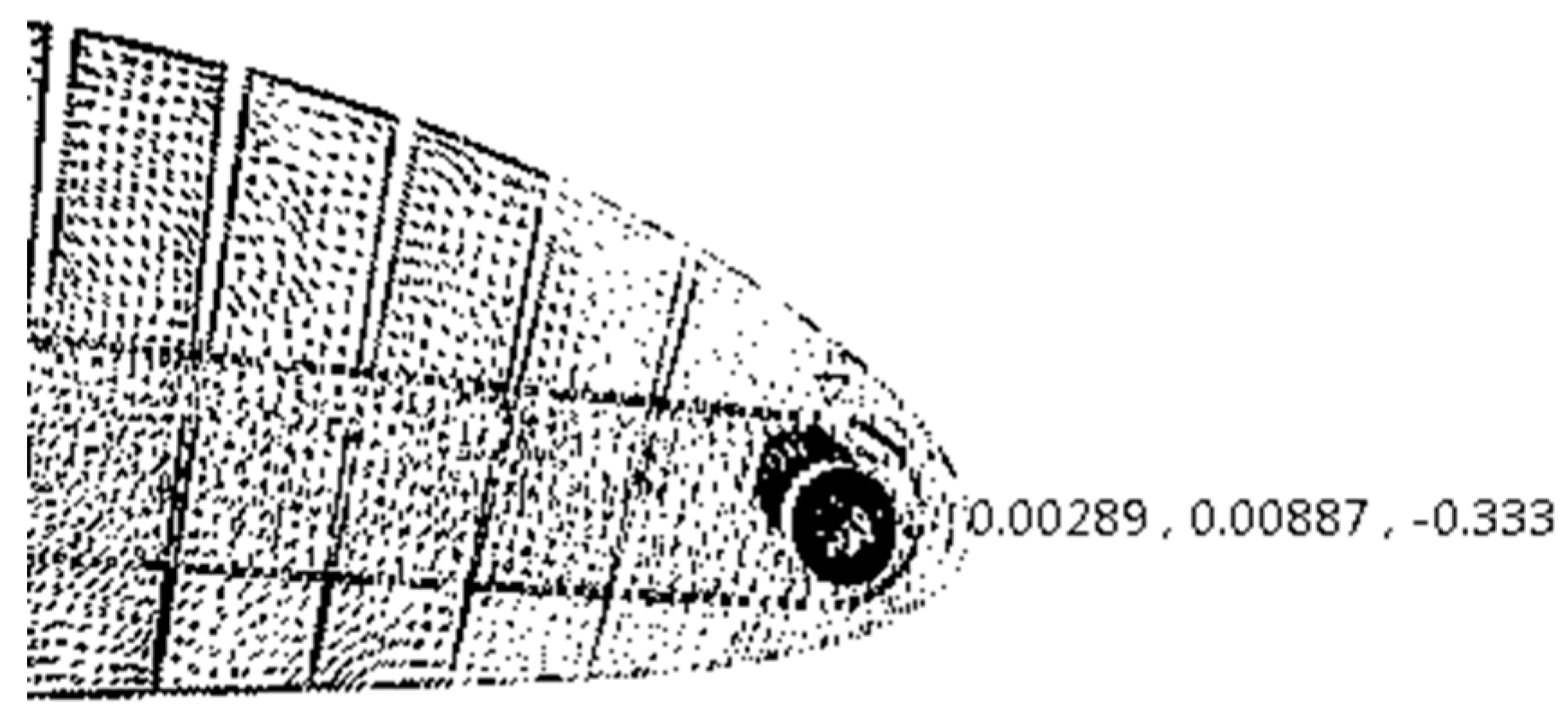
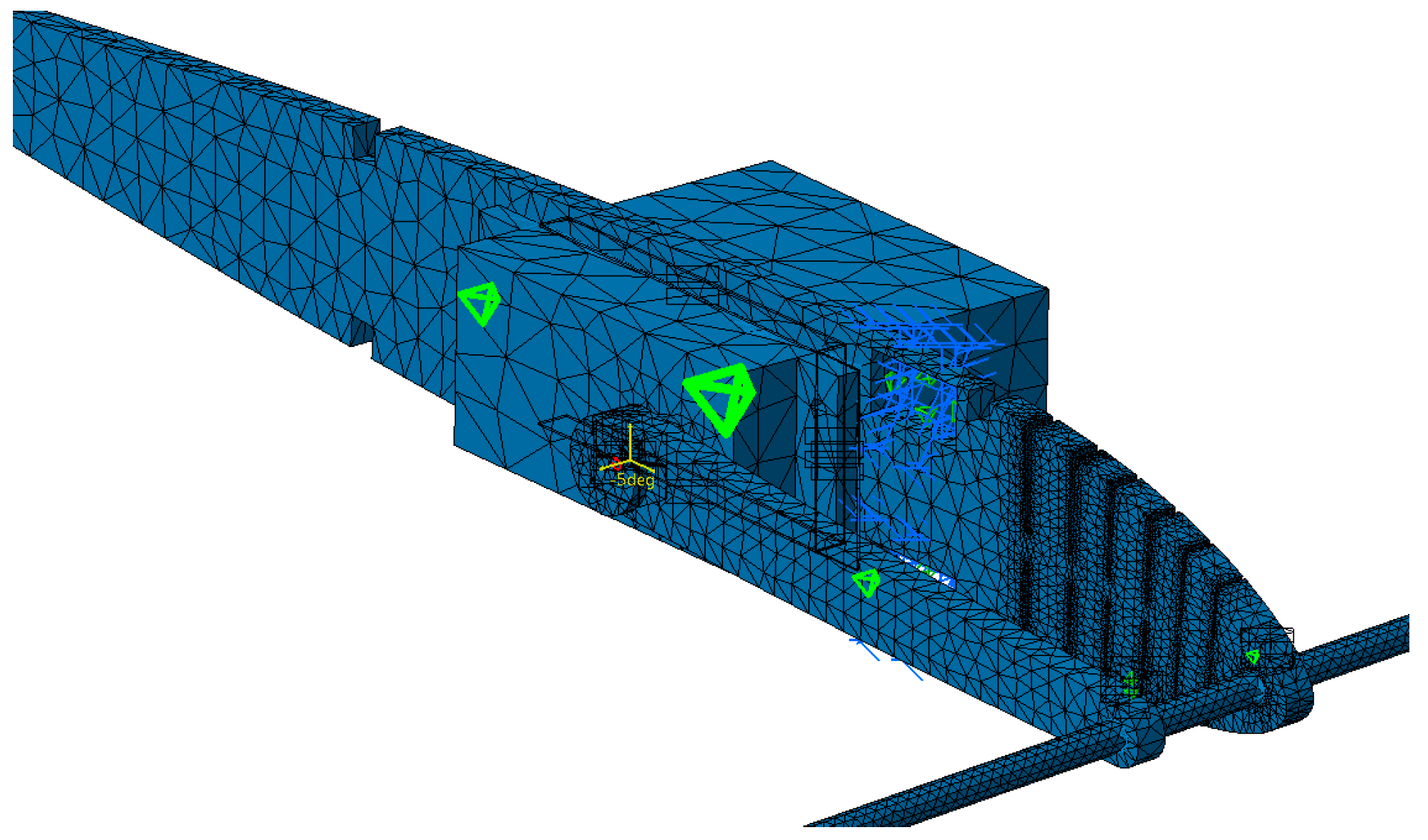
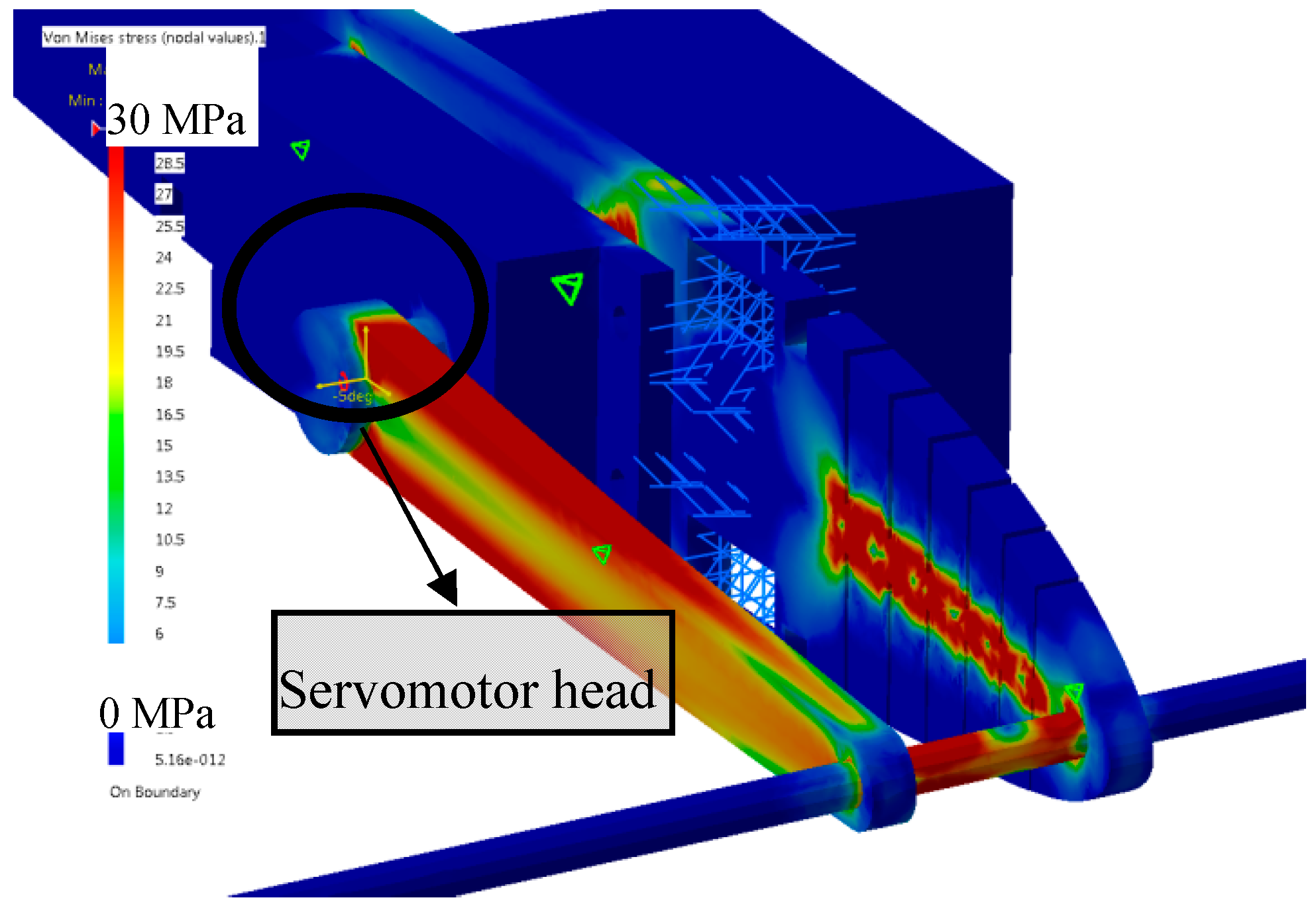
3. Structural Analysis of the MLE System
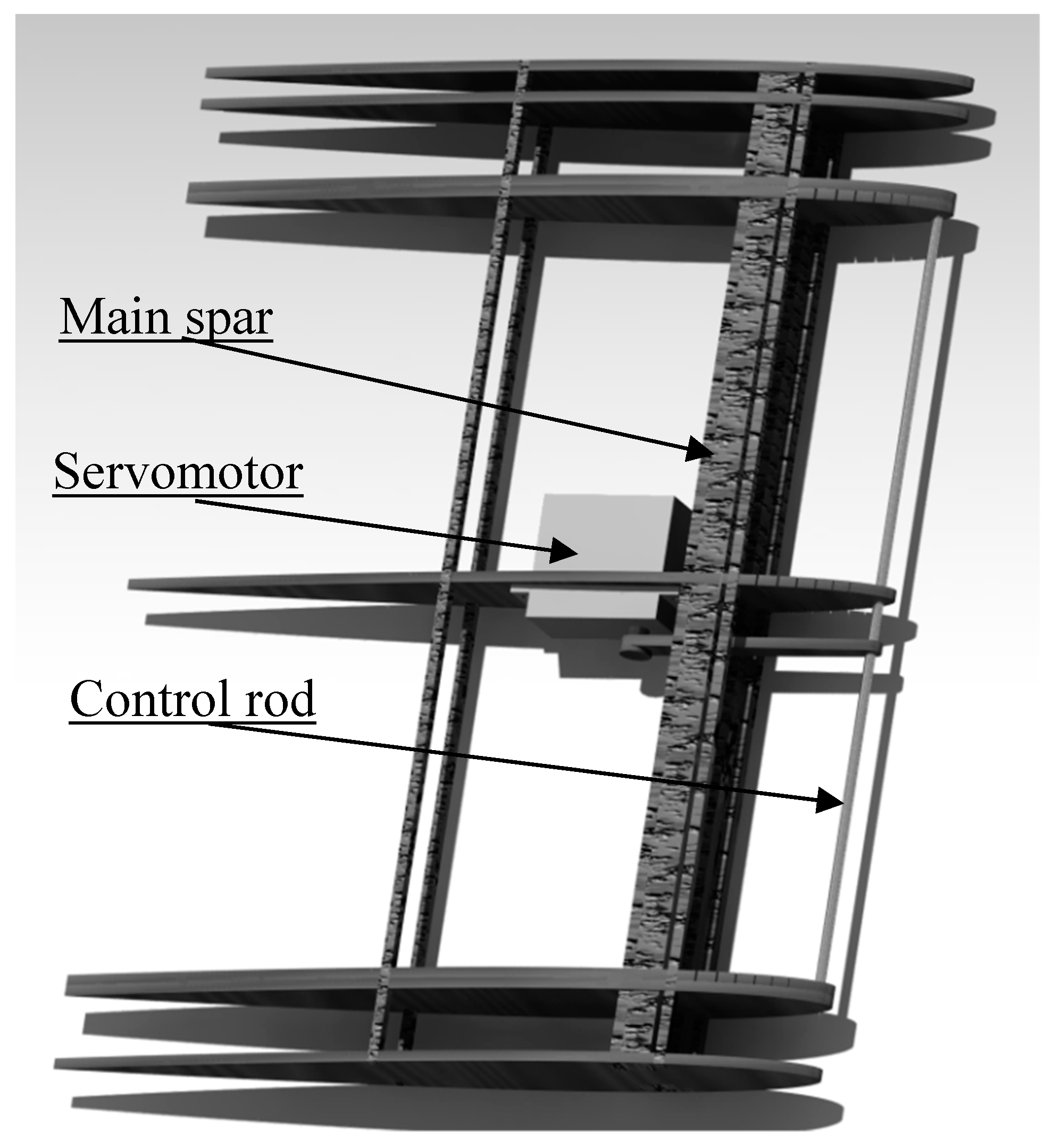
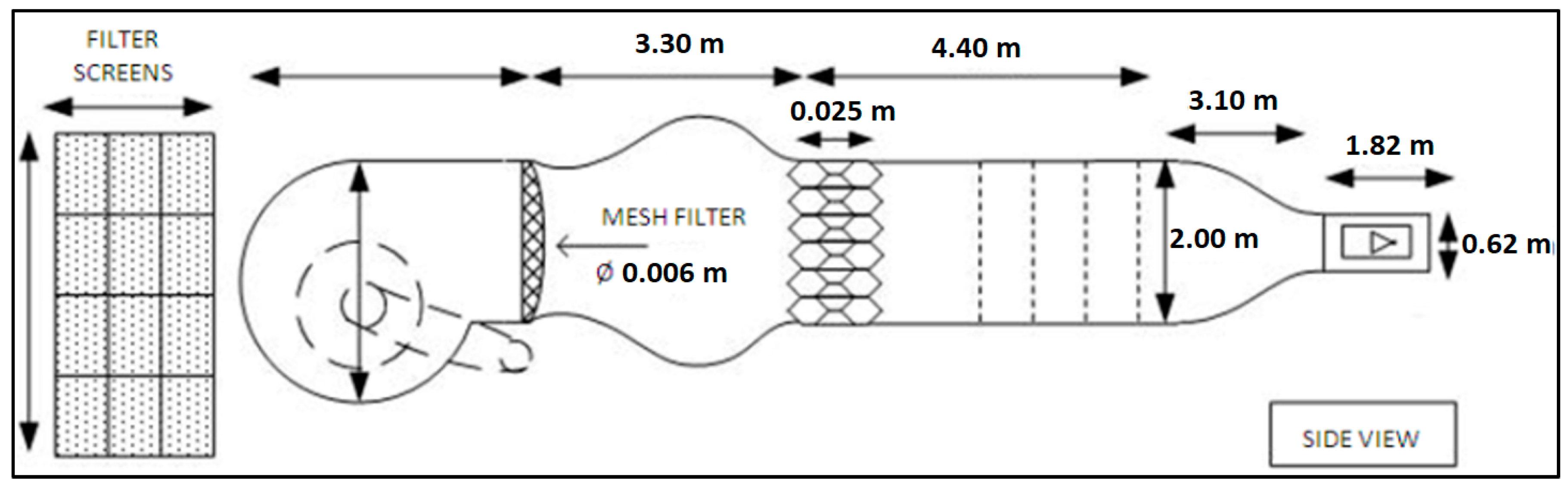
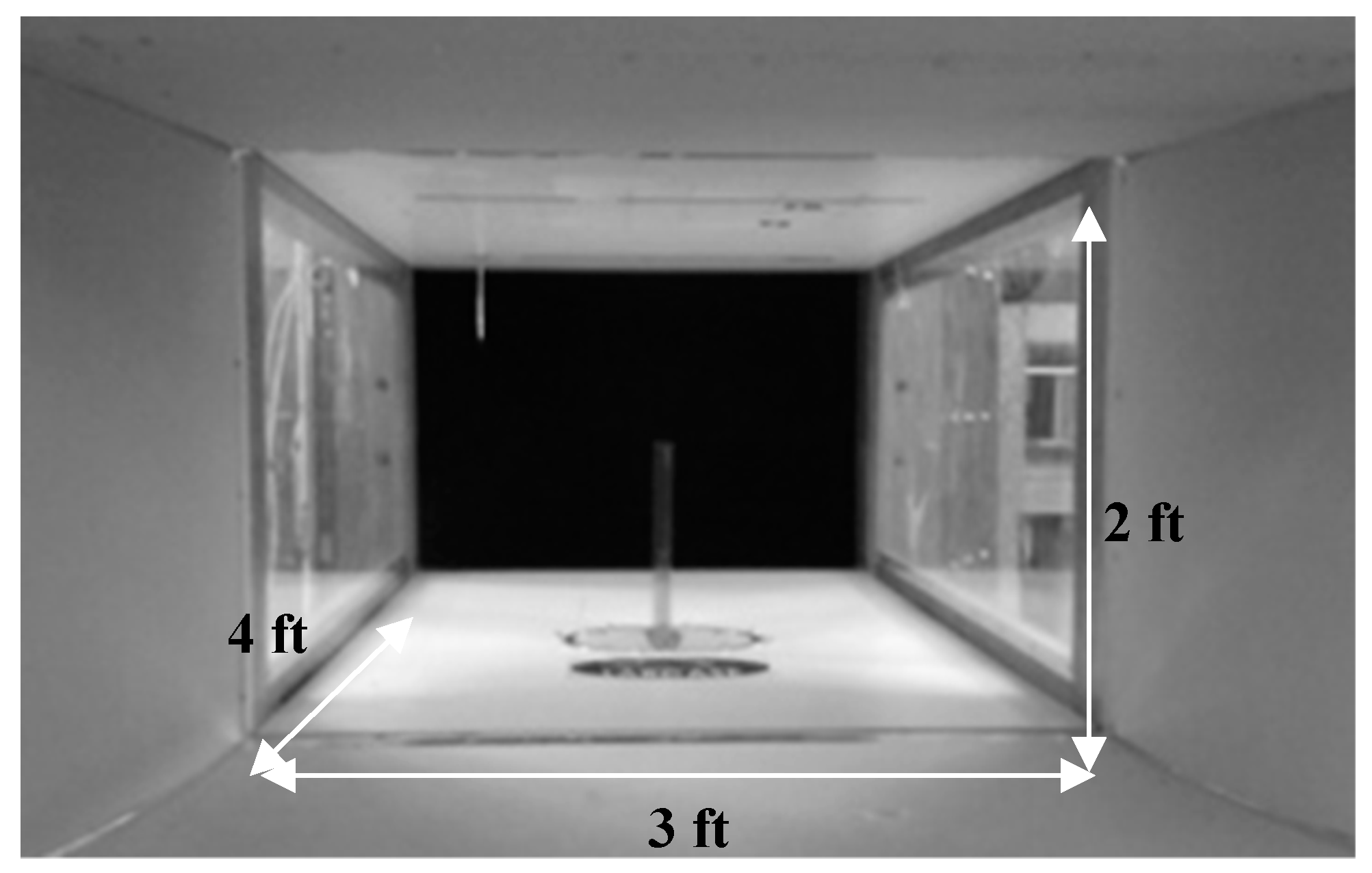
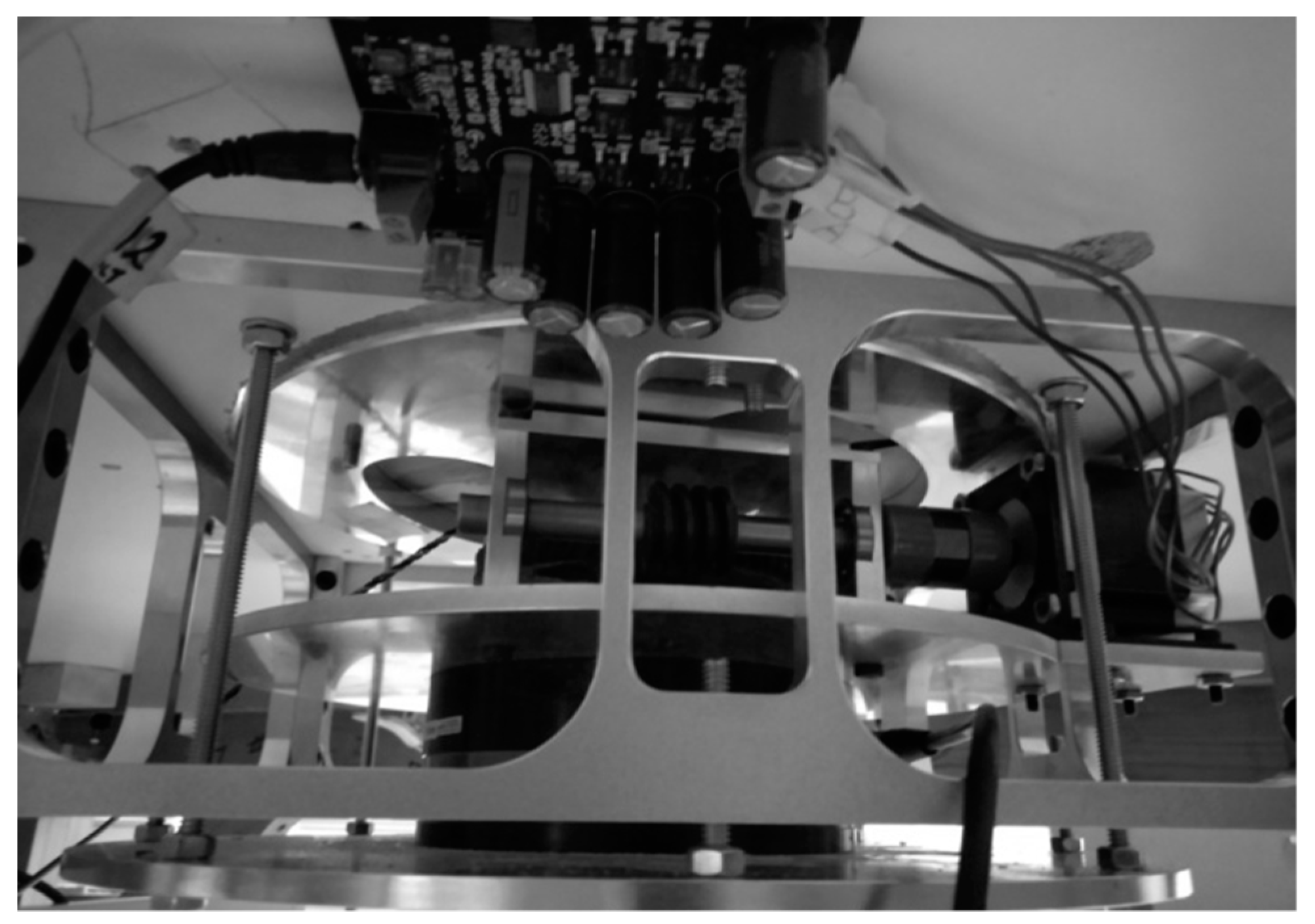
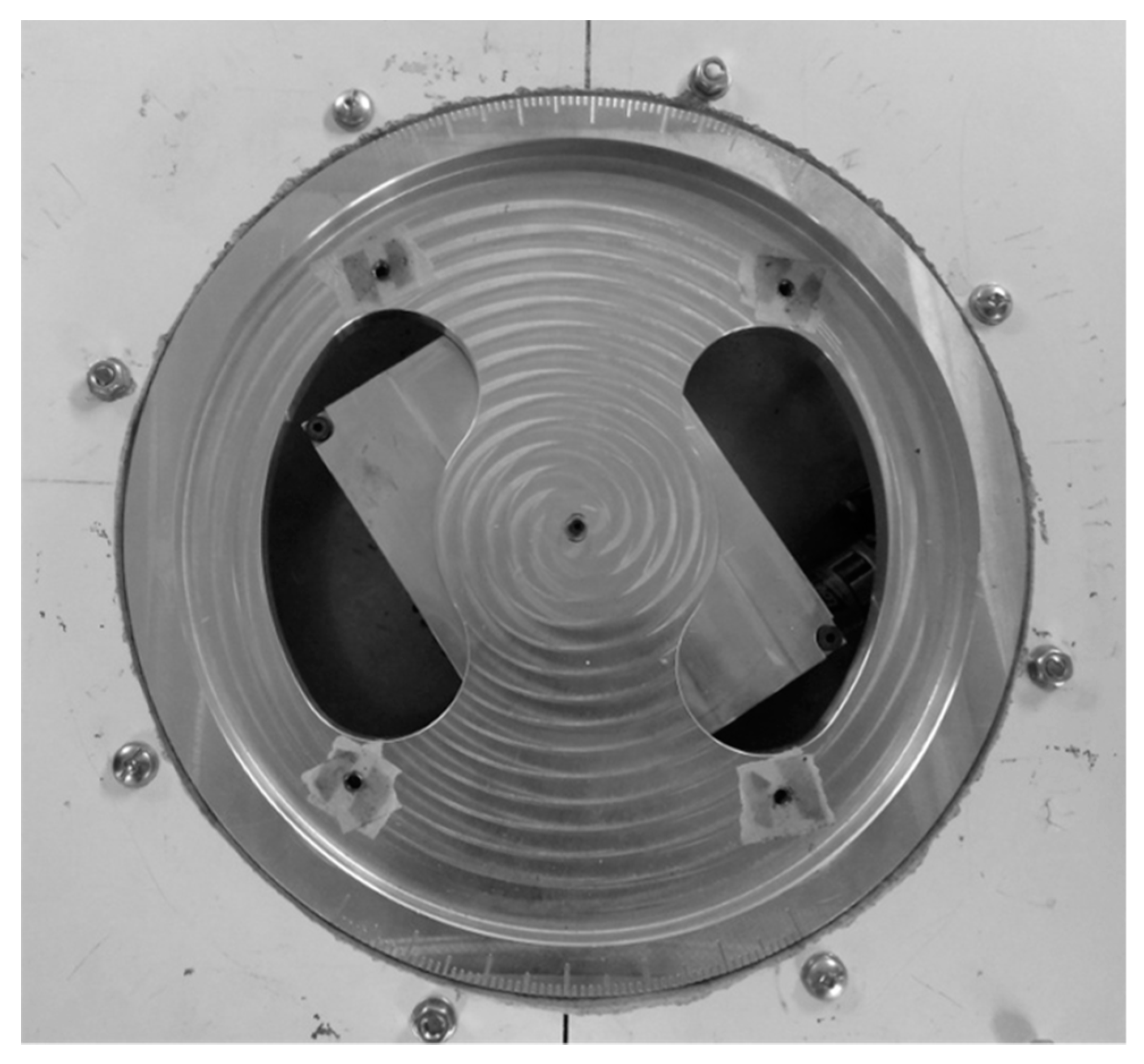
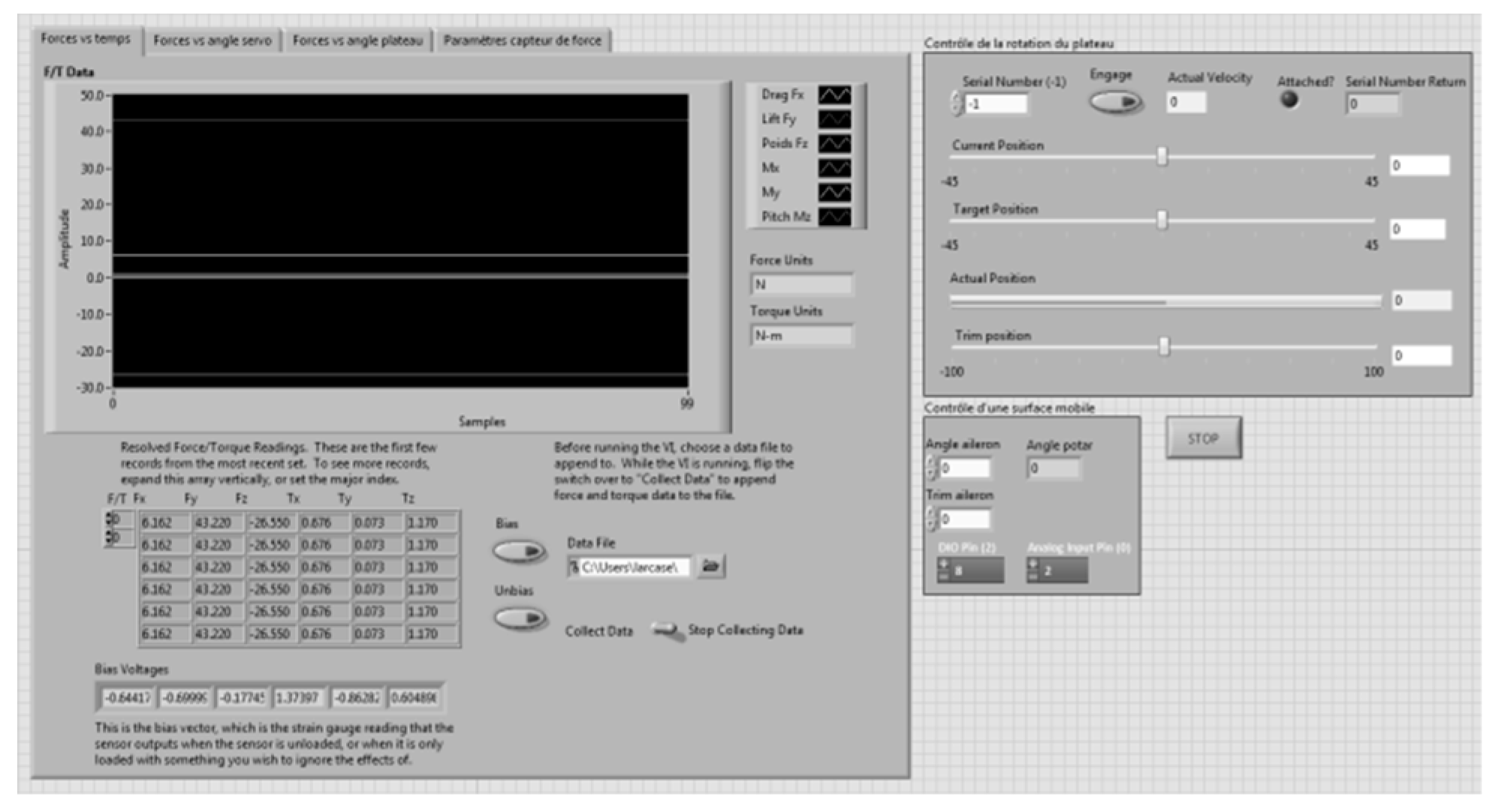
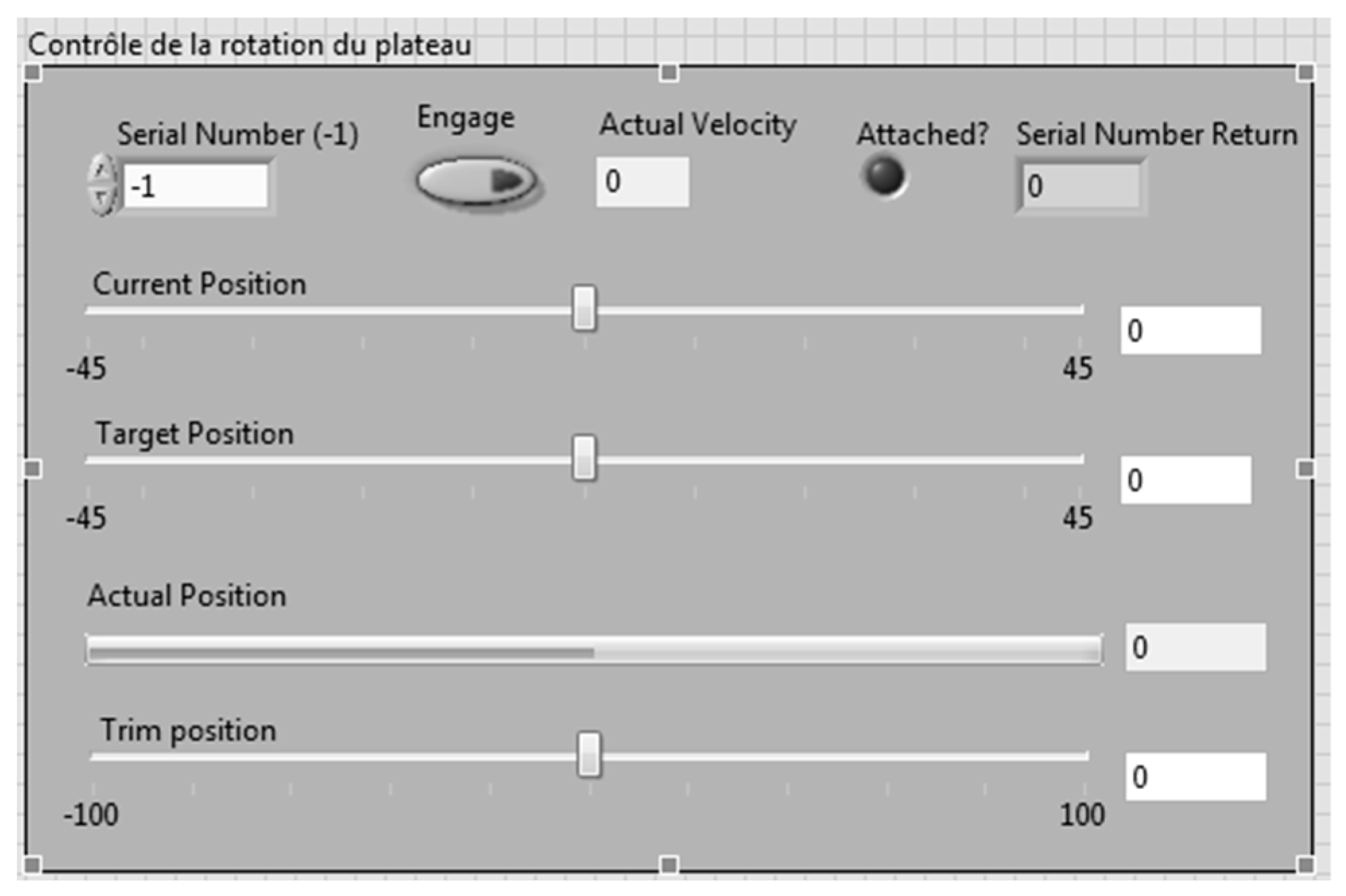
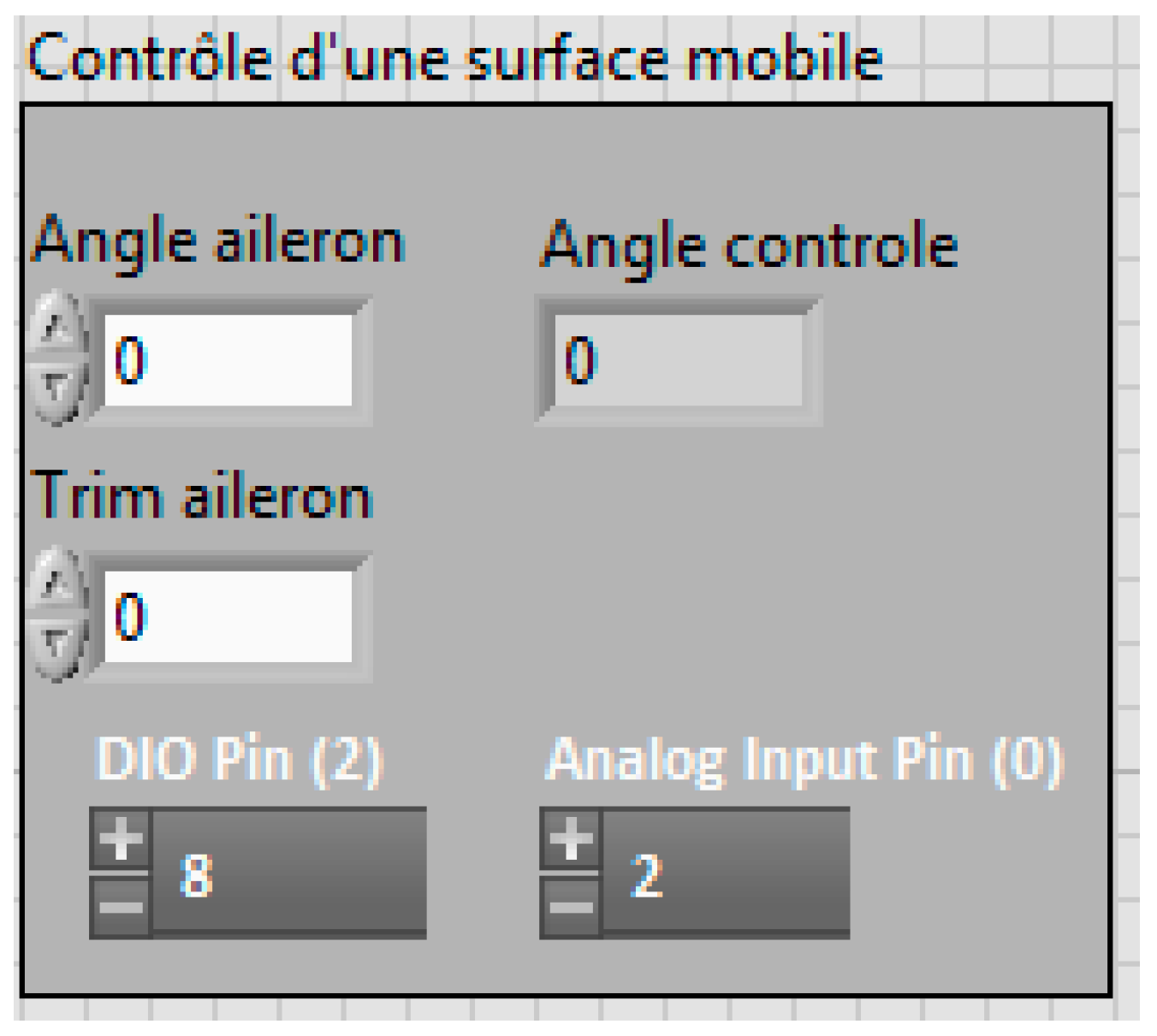
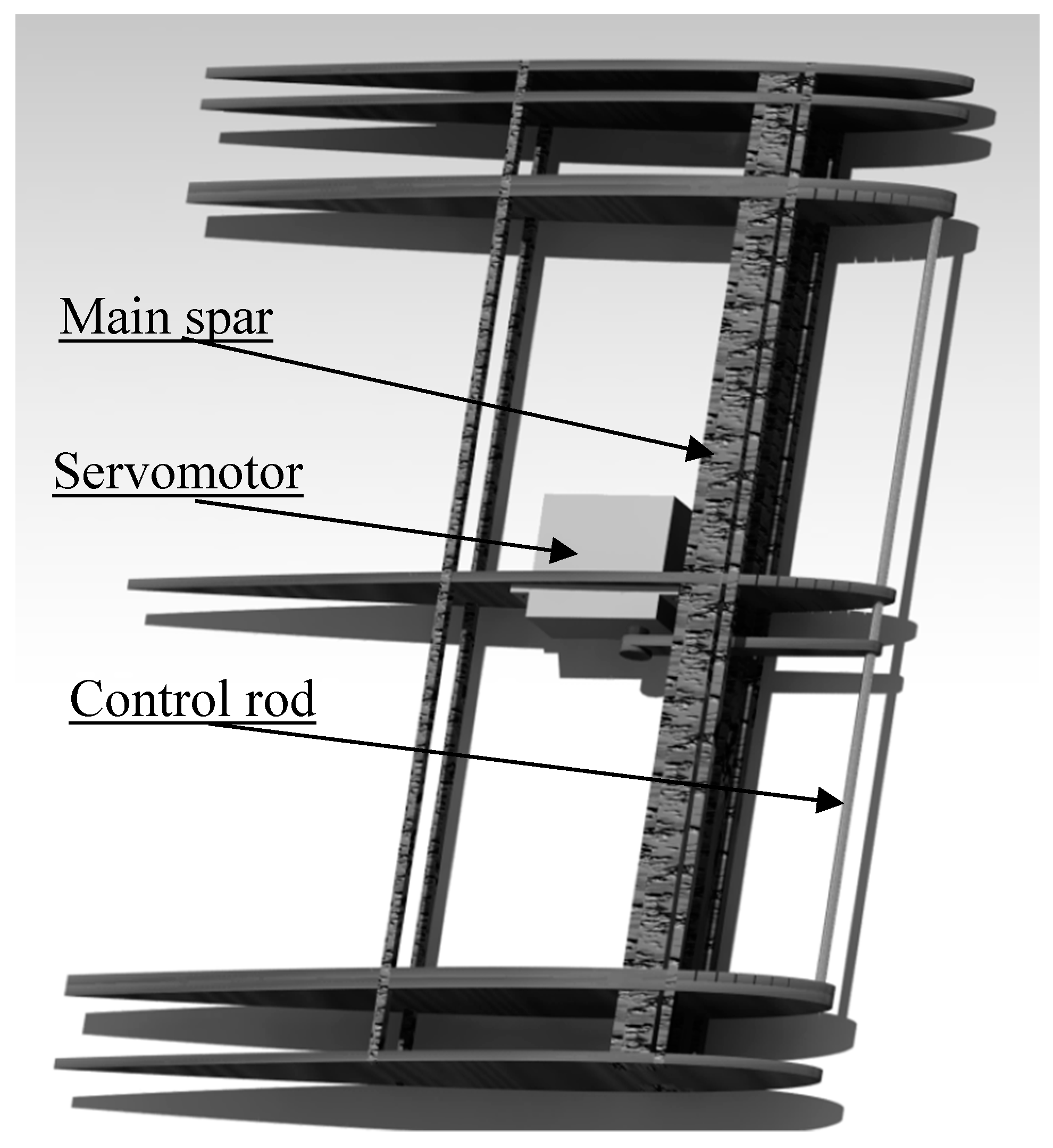
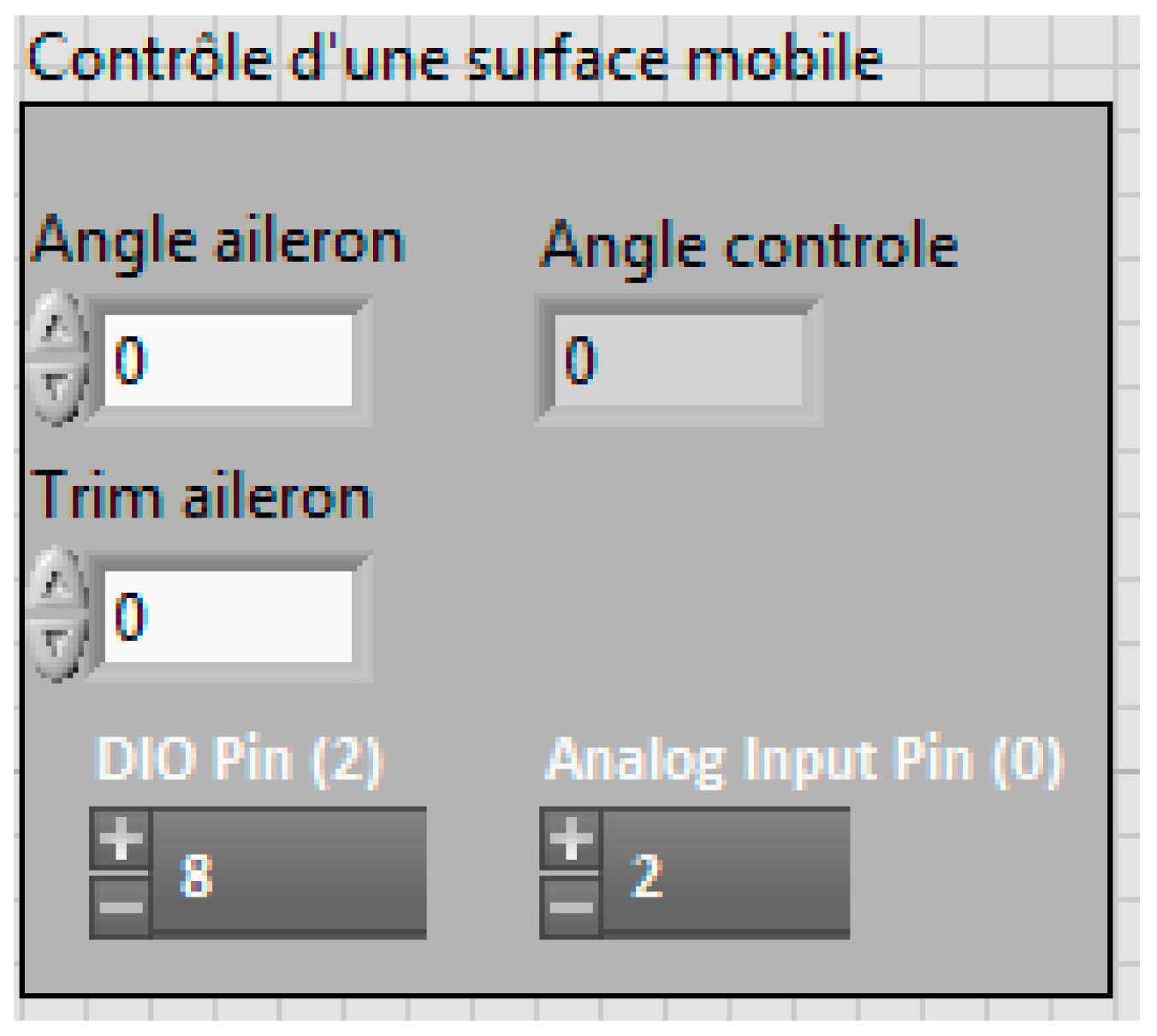
4. Experimental Setup of the MLE System
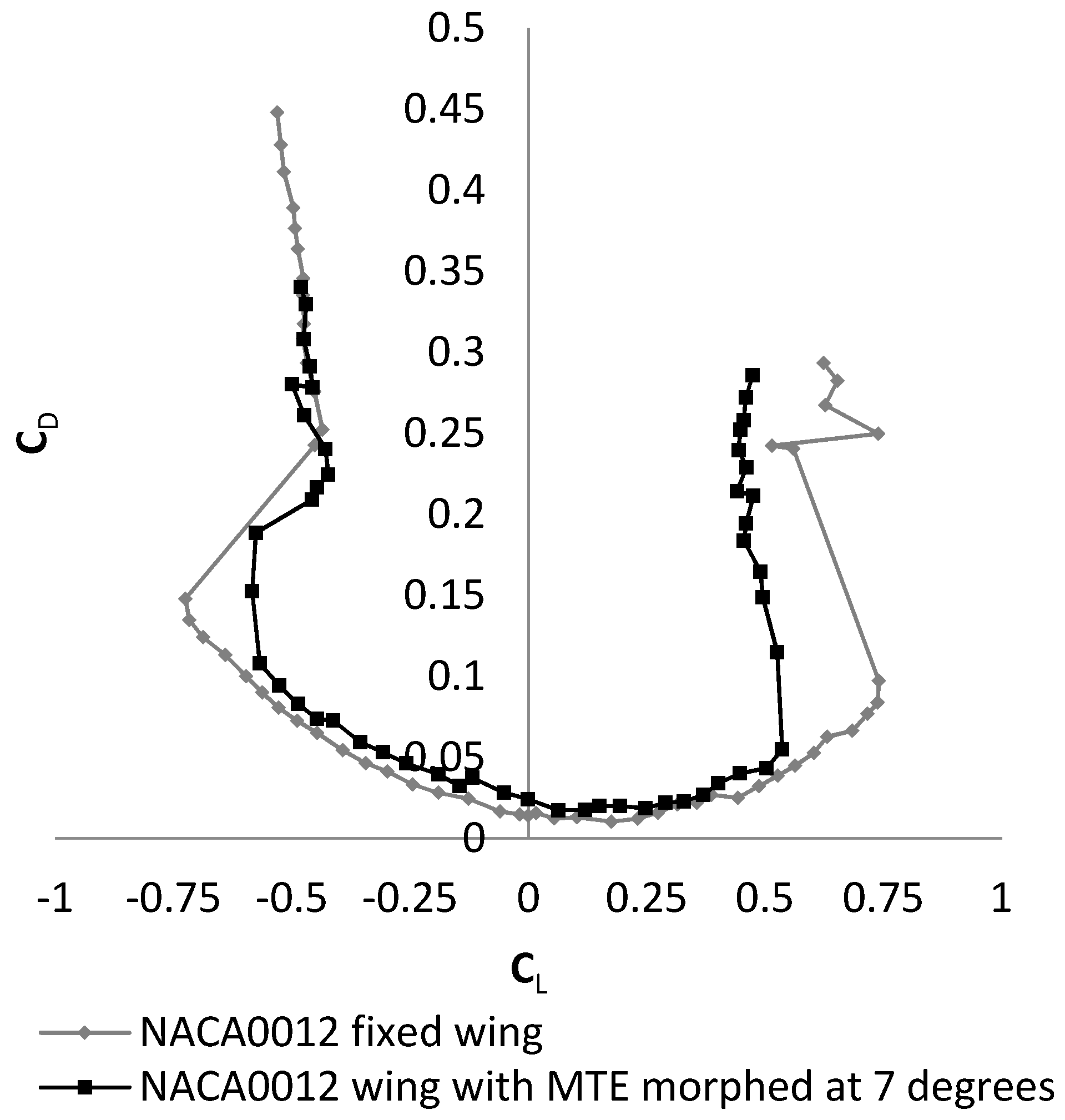
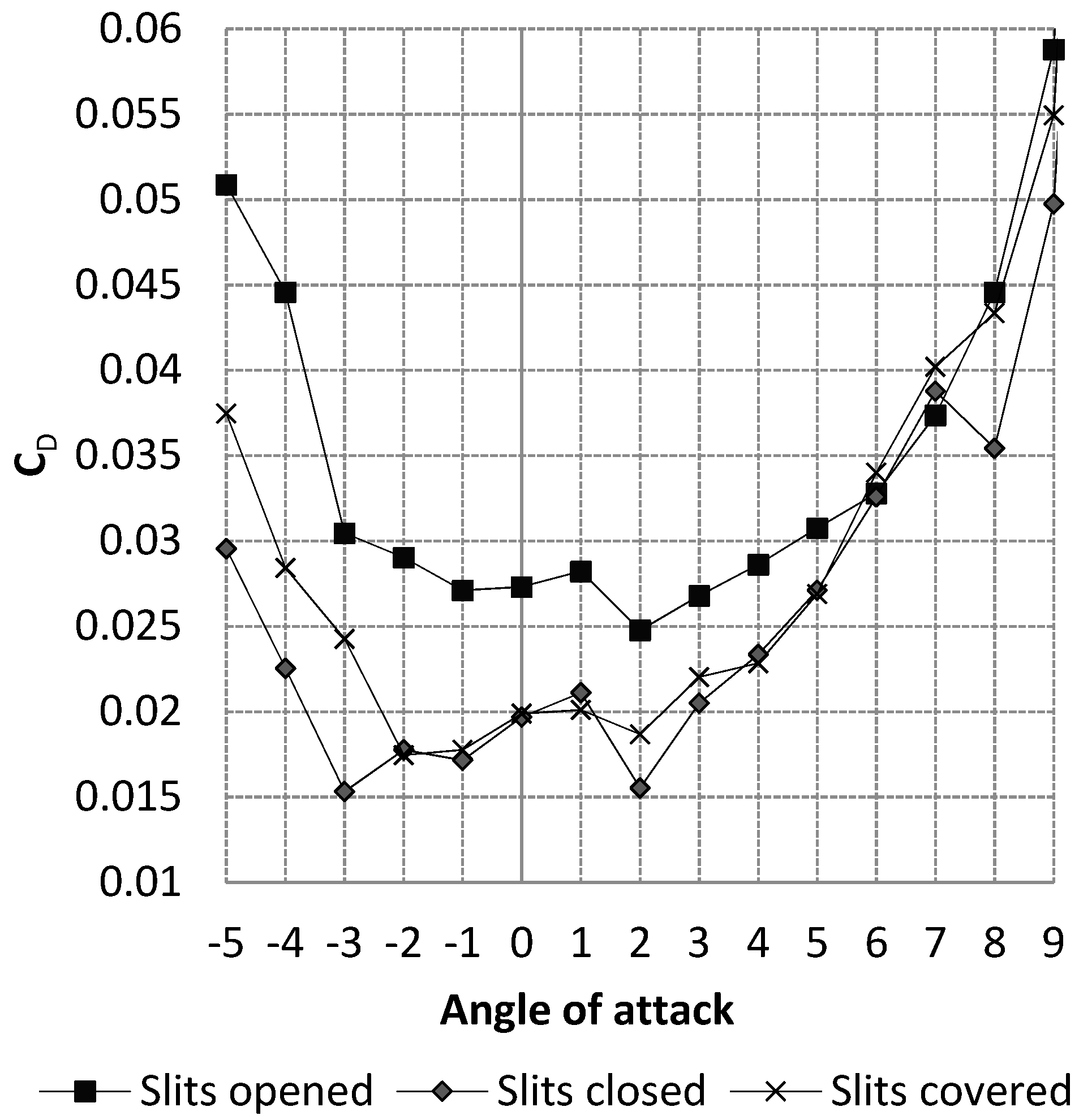
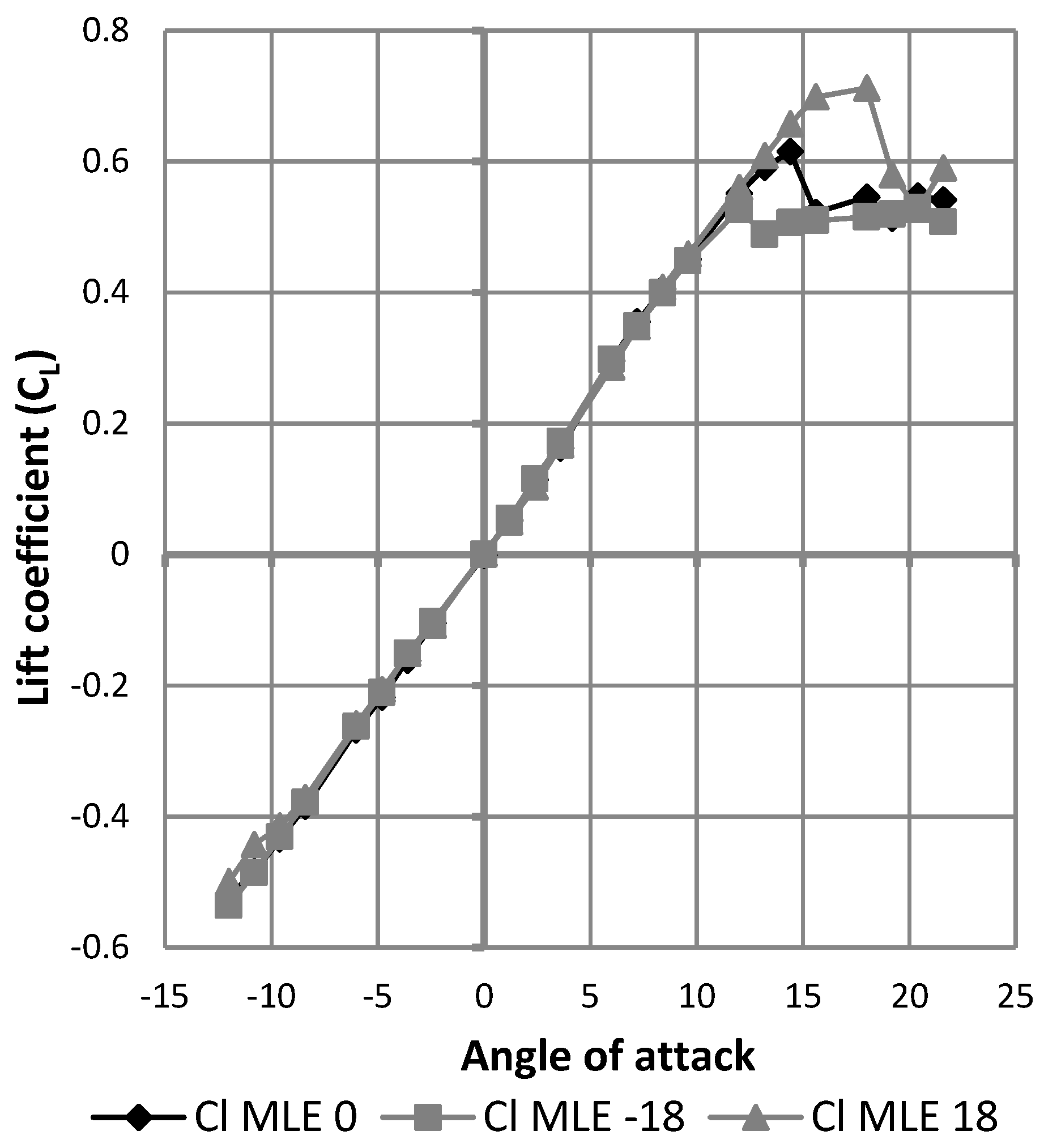
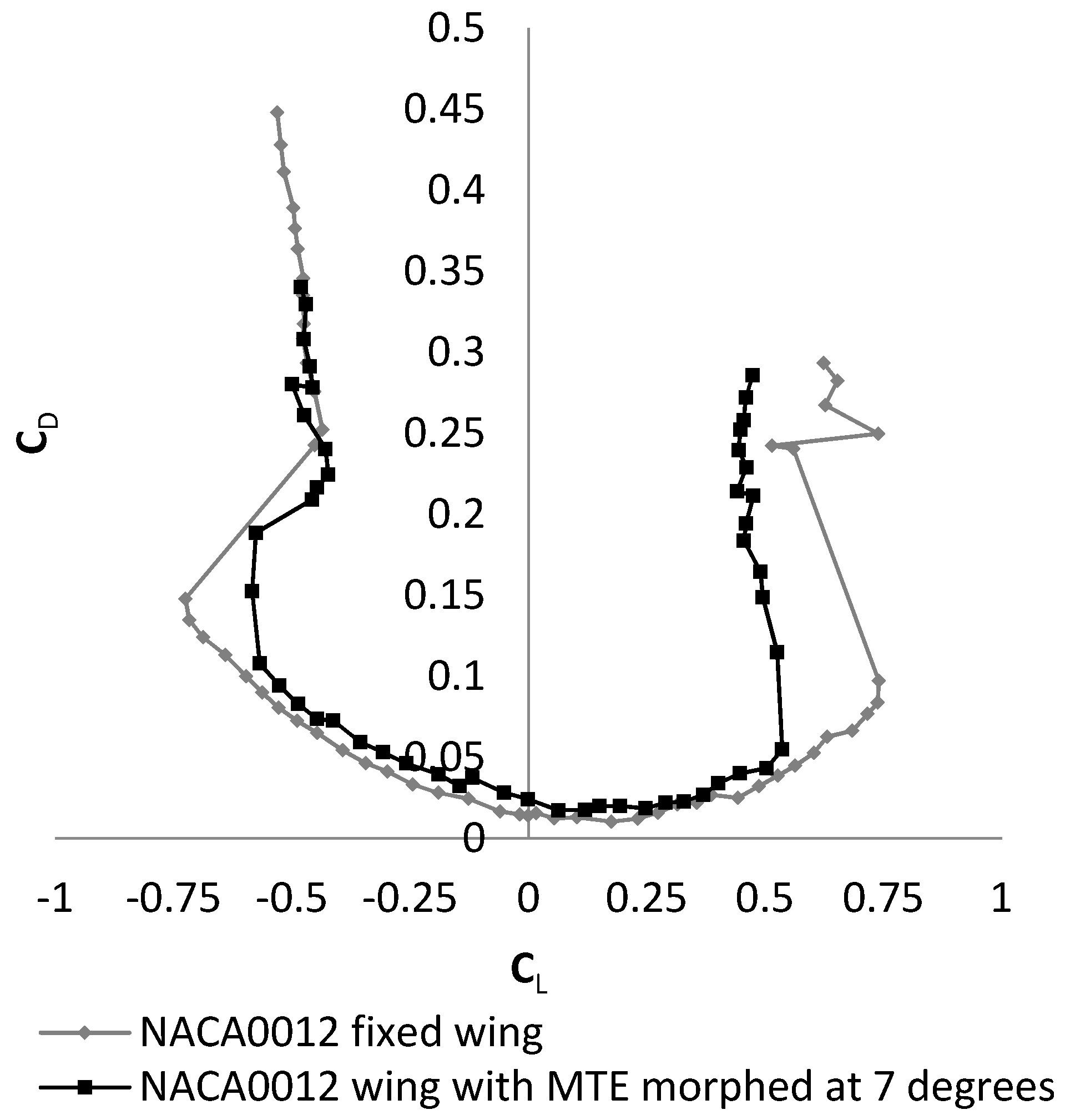
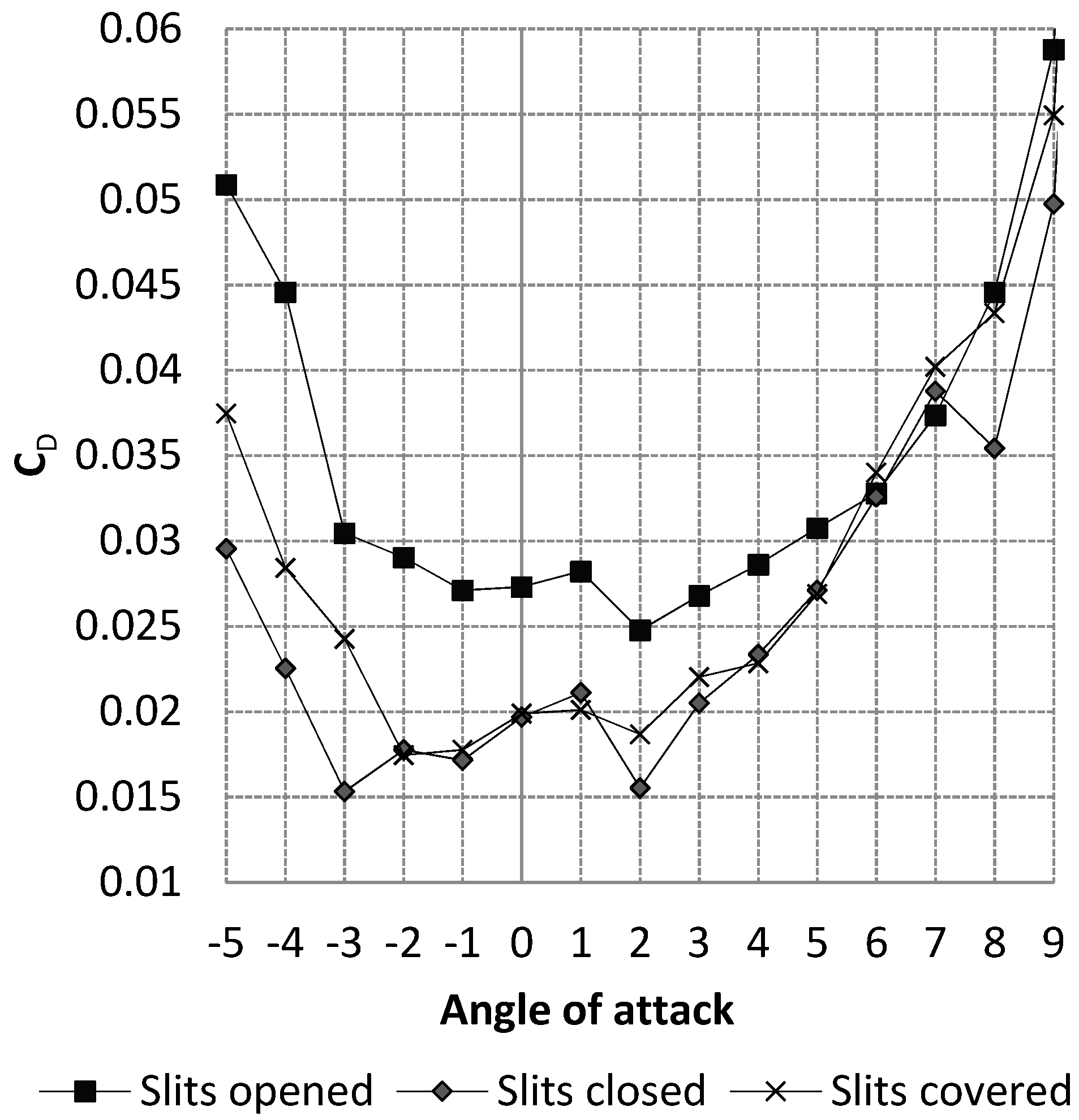
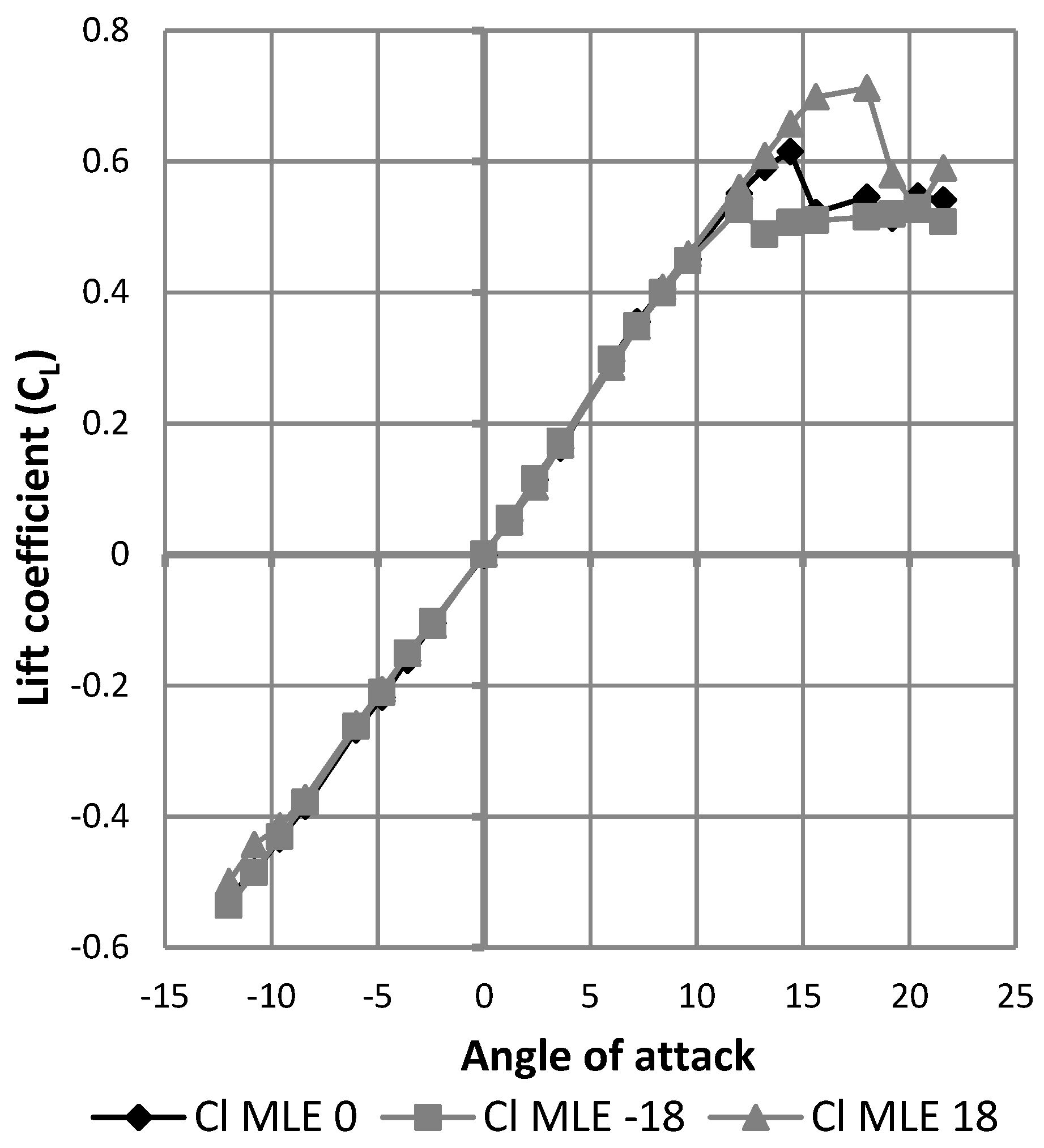
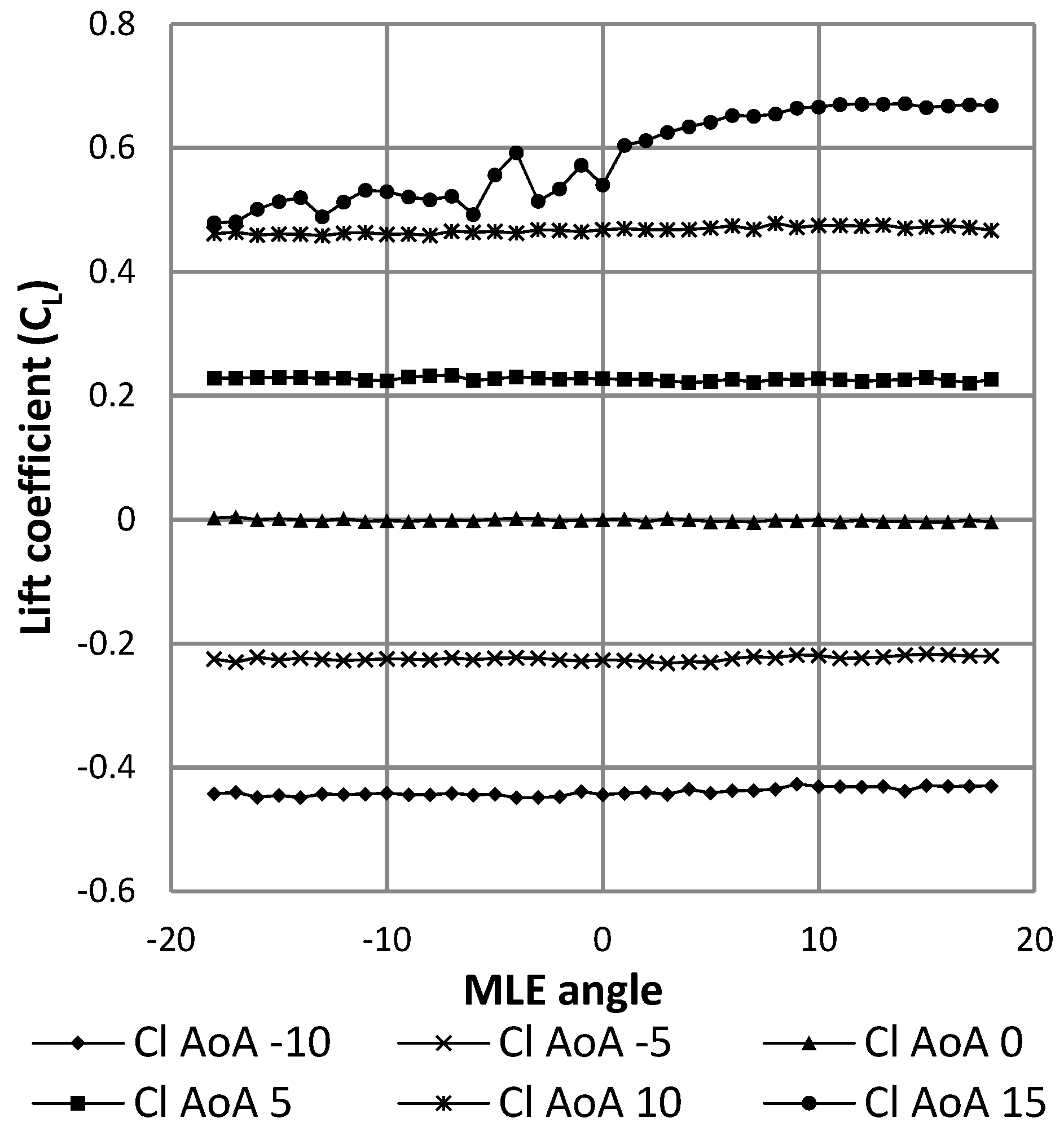
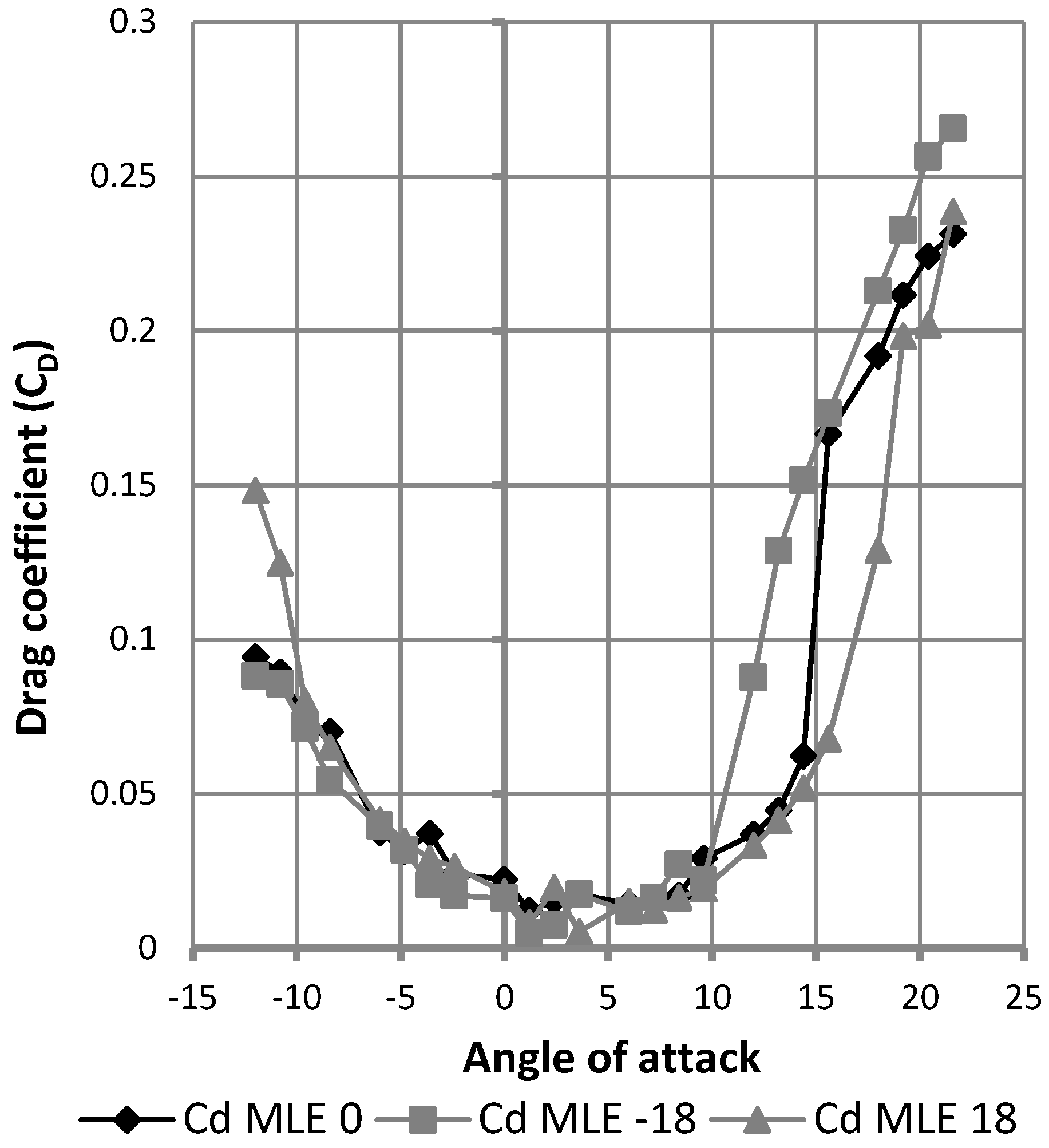
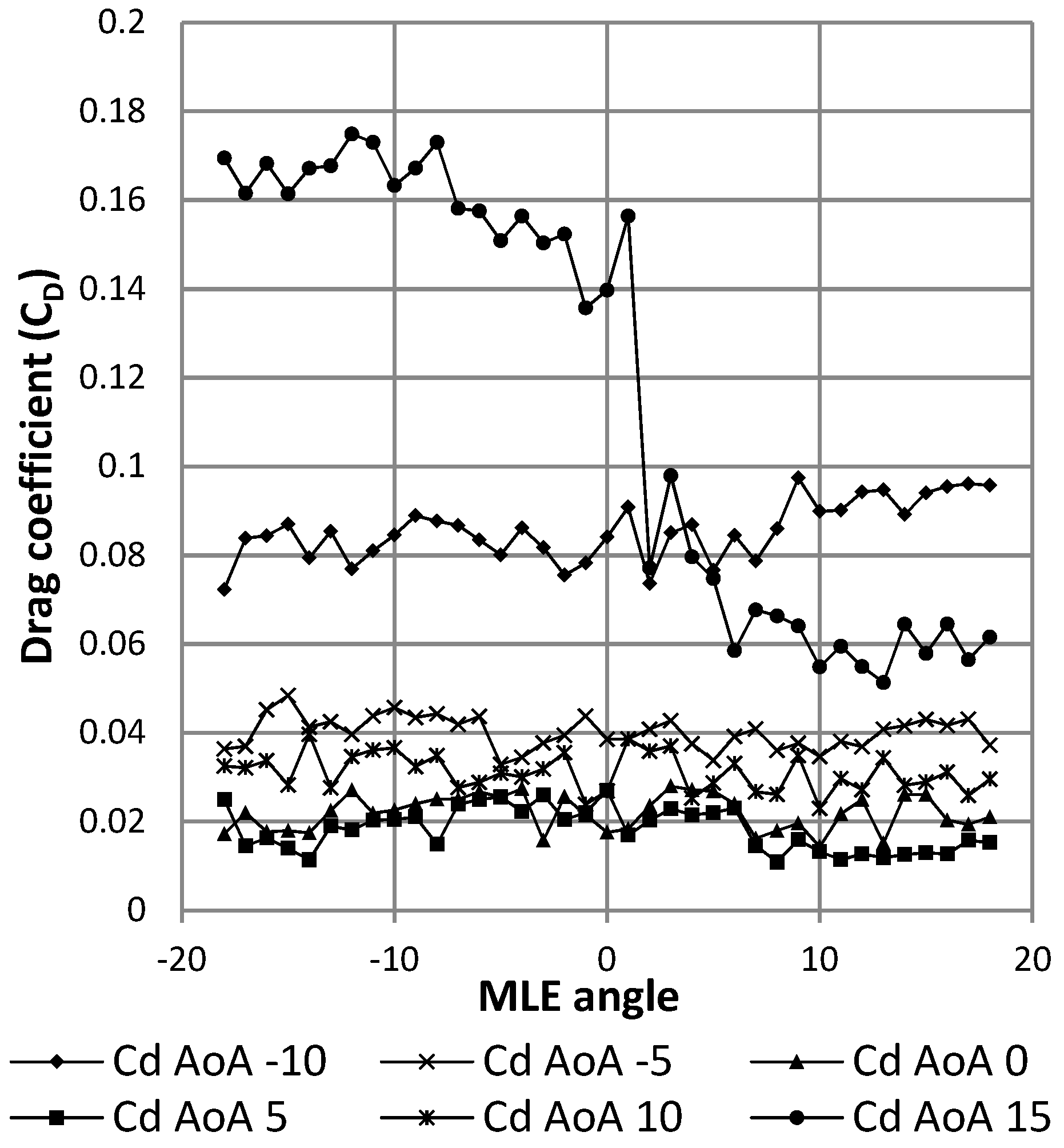
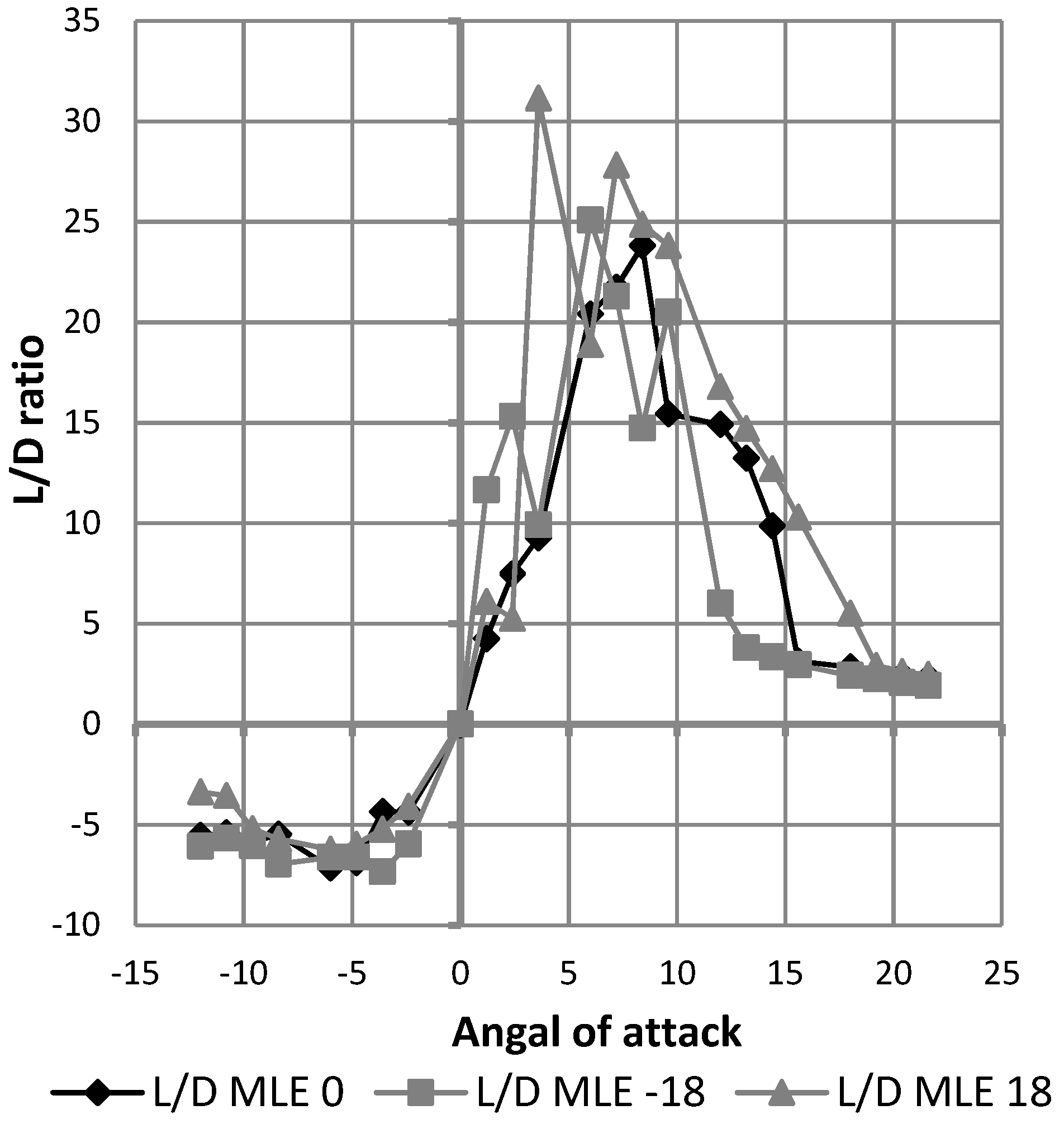
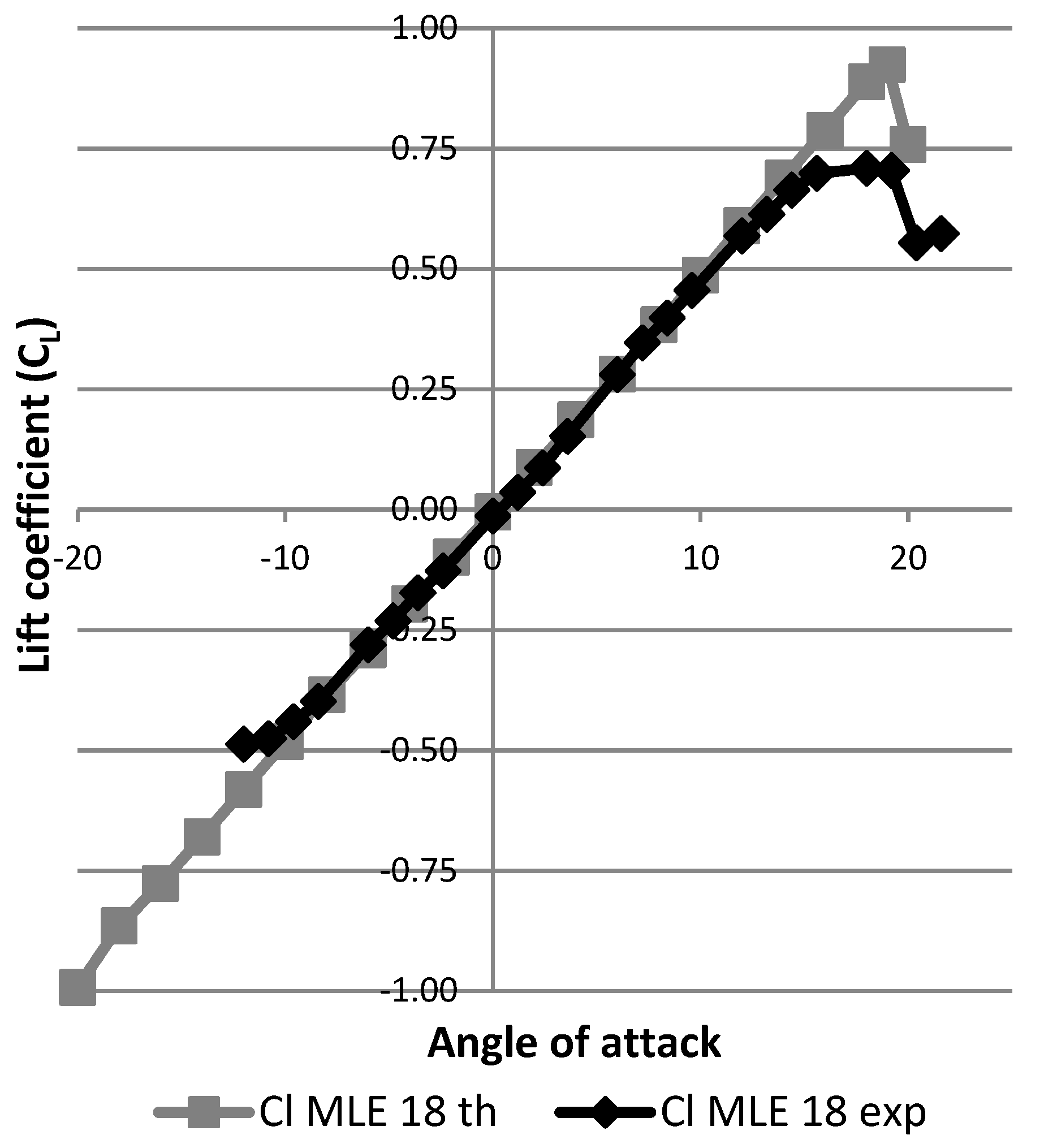
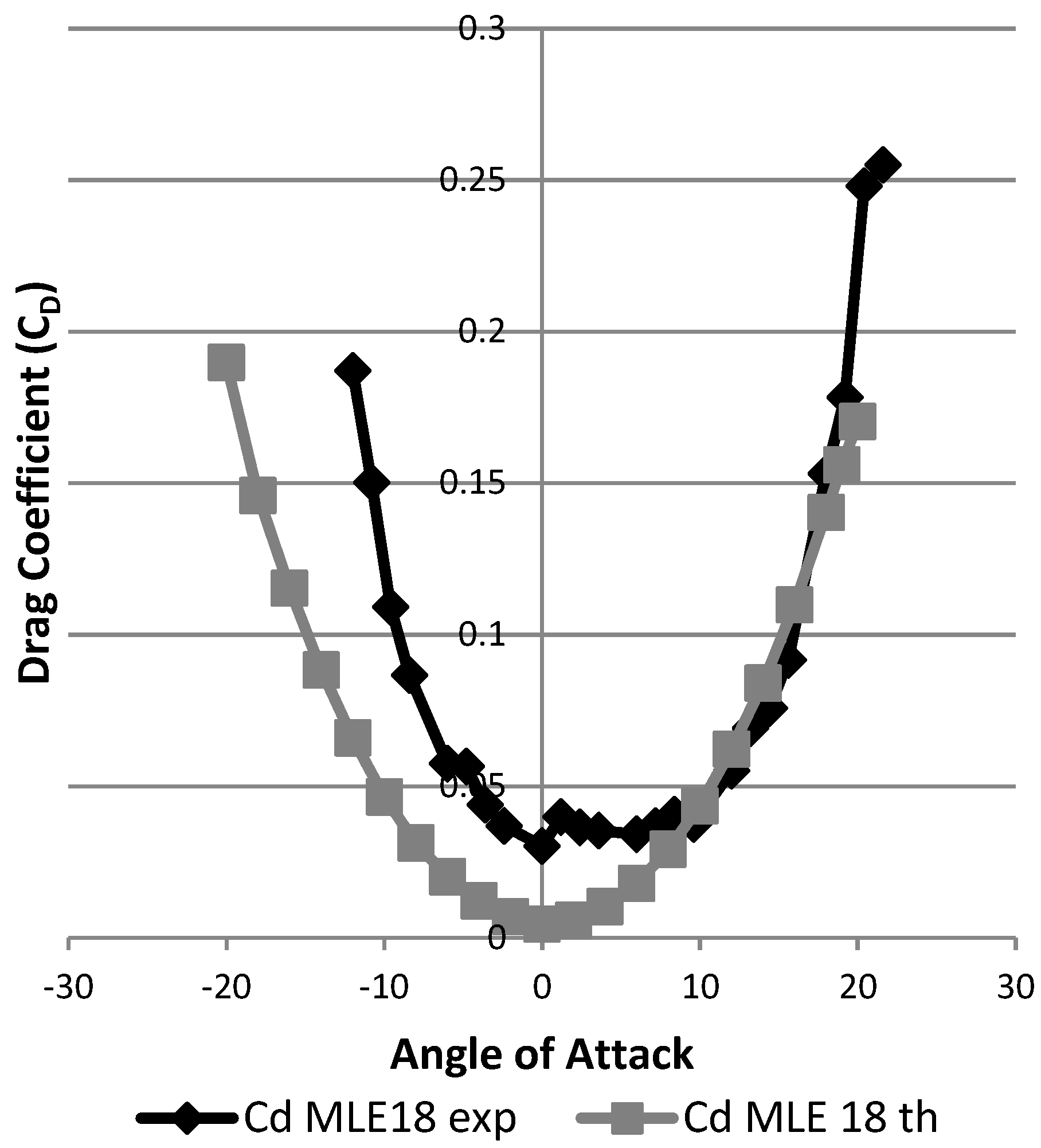
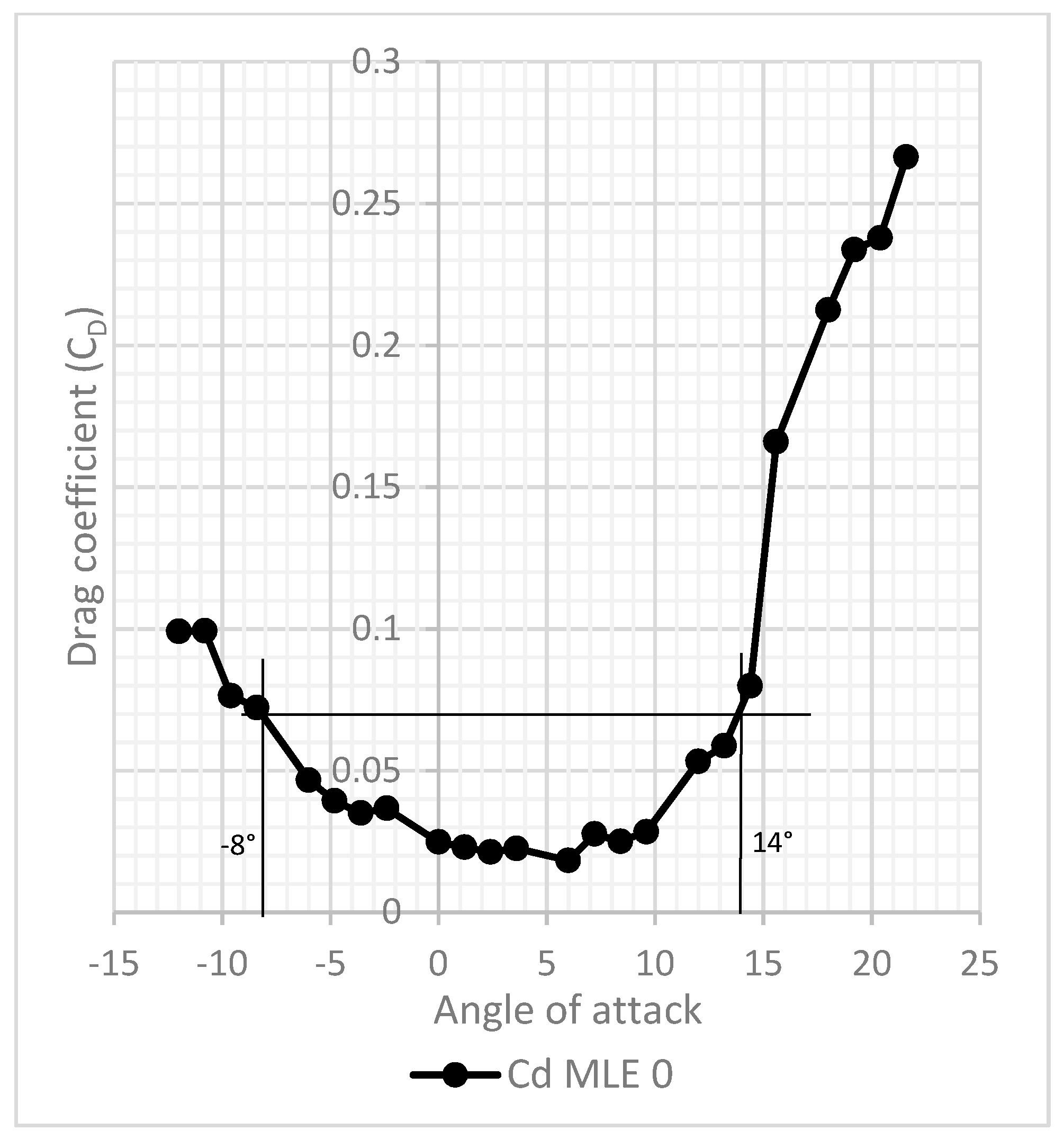
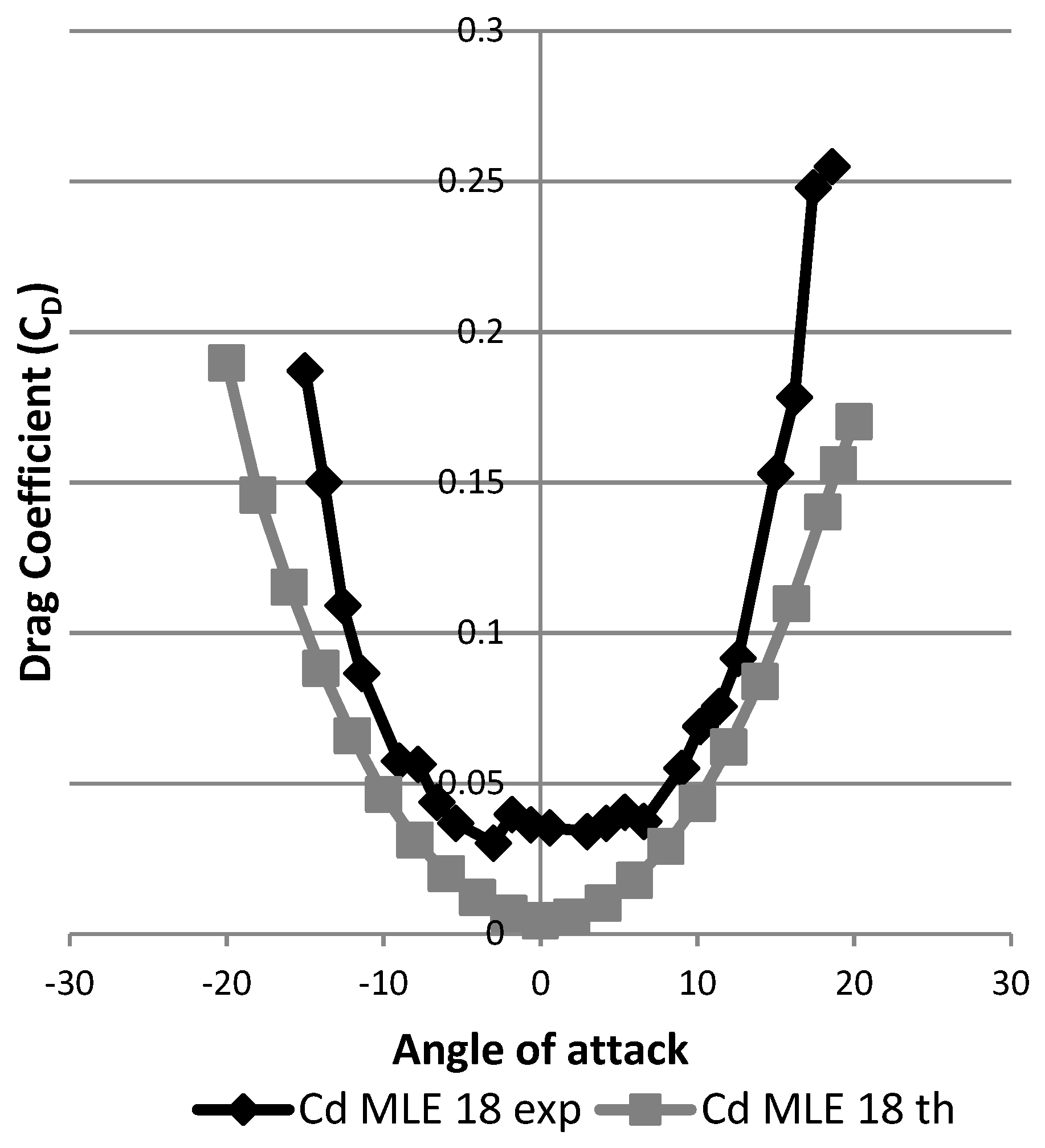
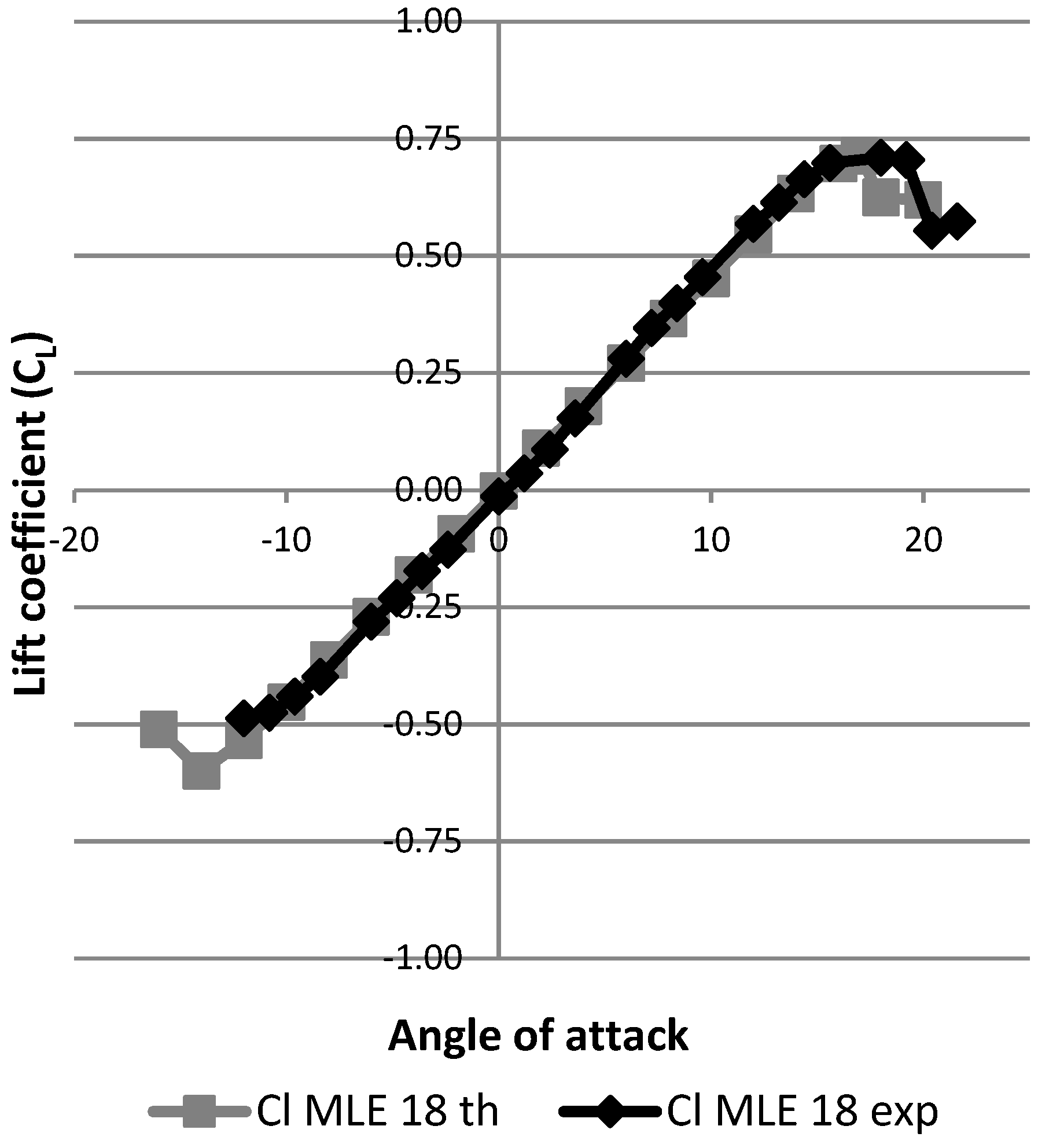
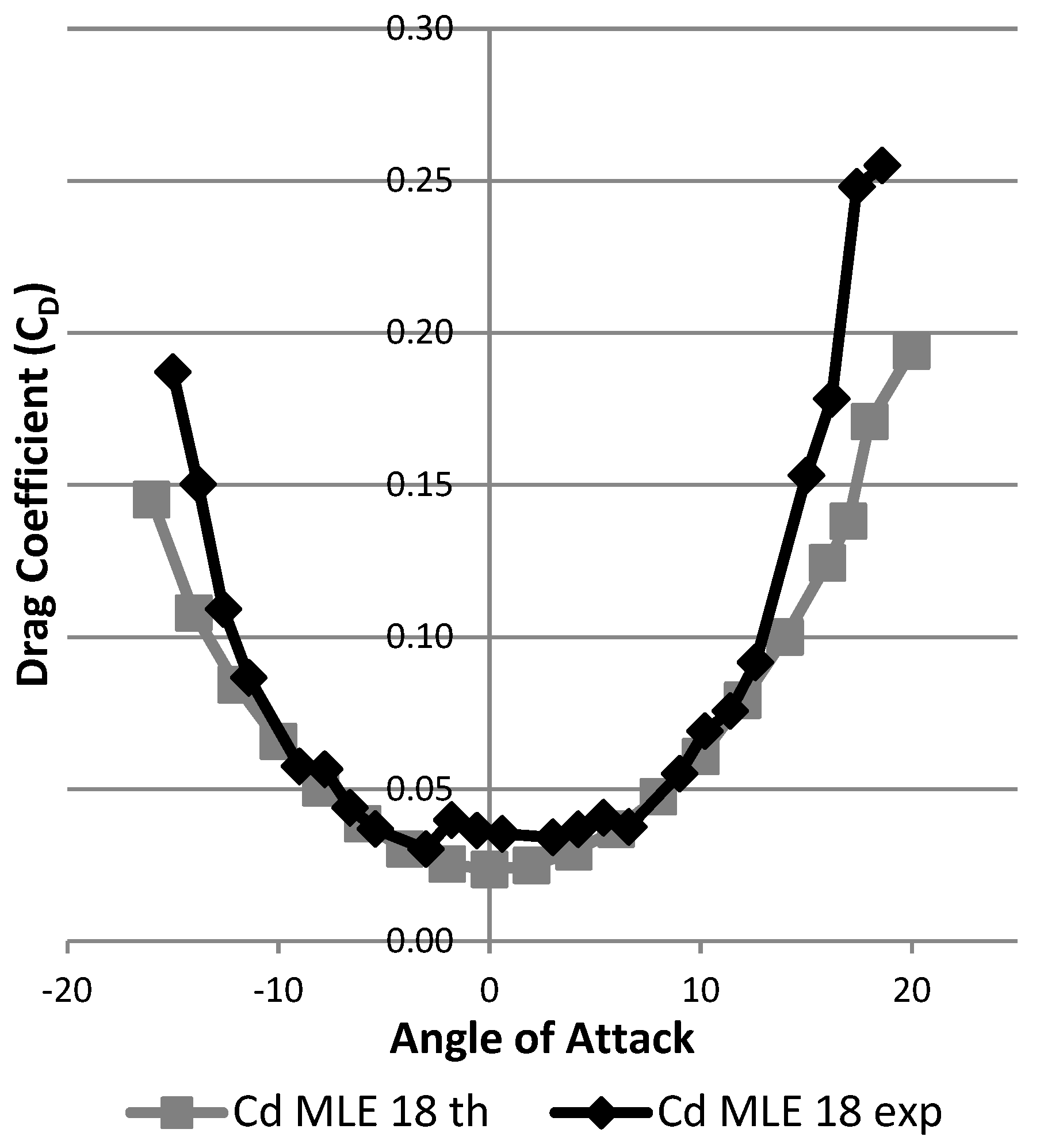
5. Wind Tunnel Test Results
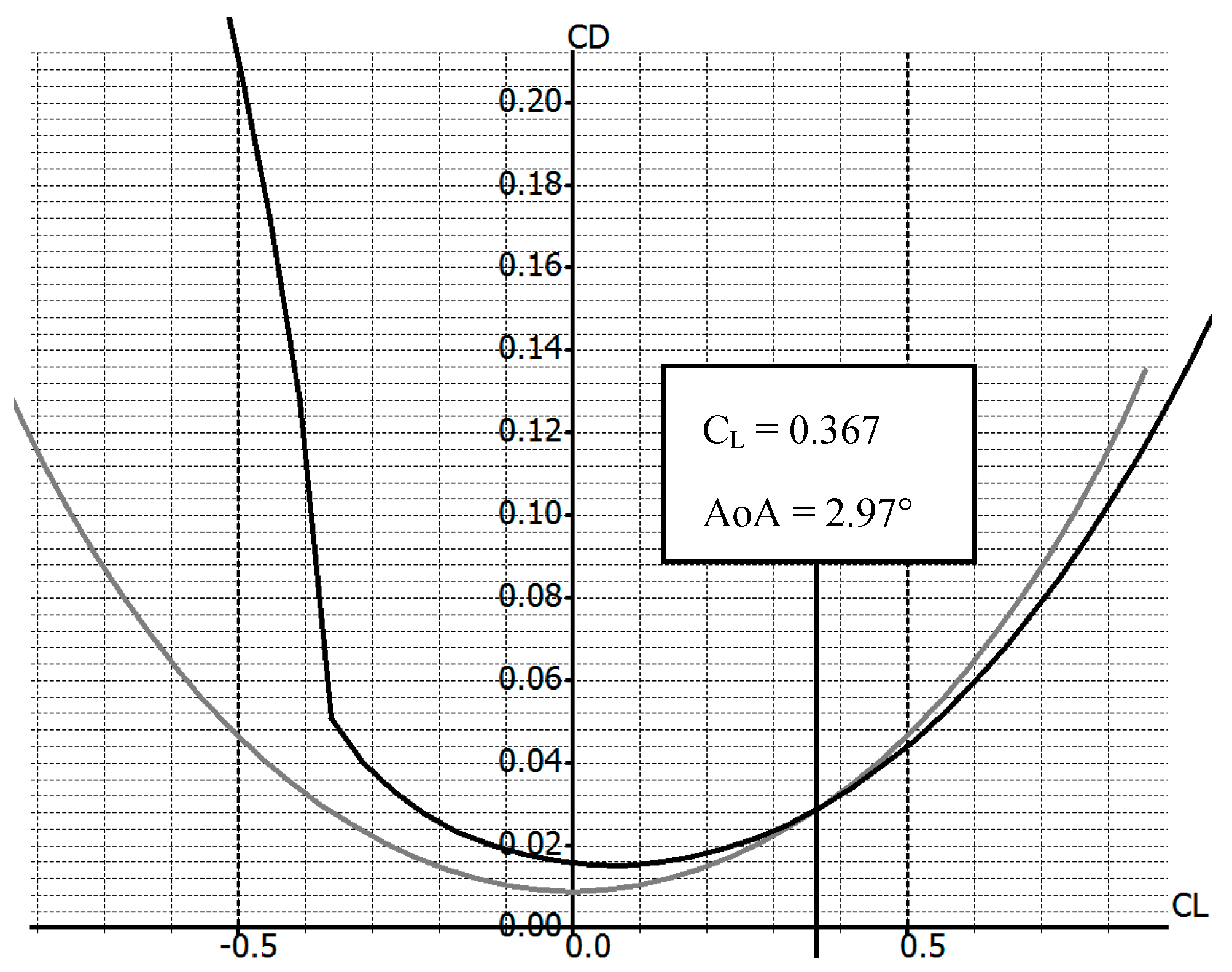
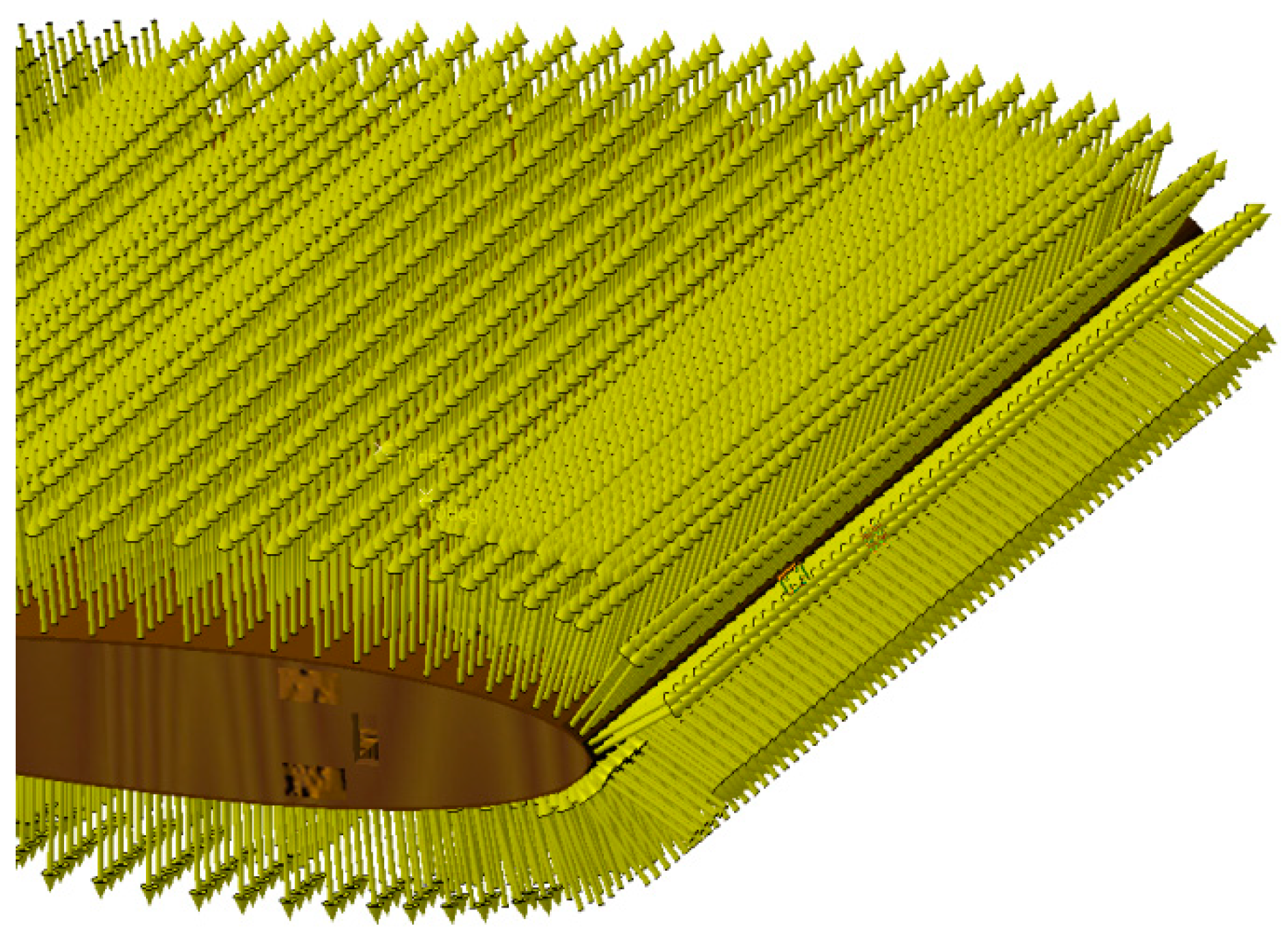
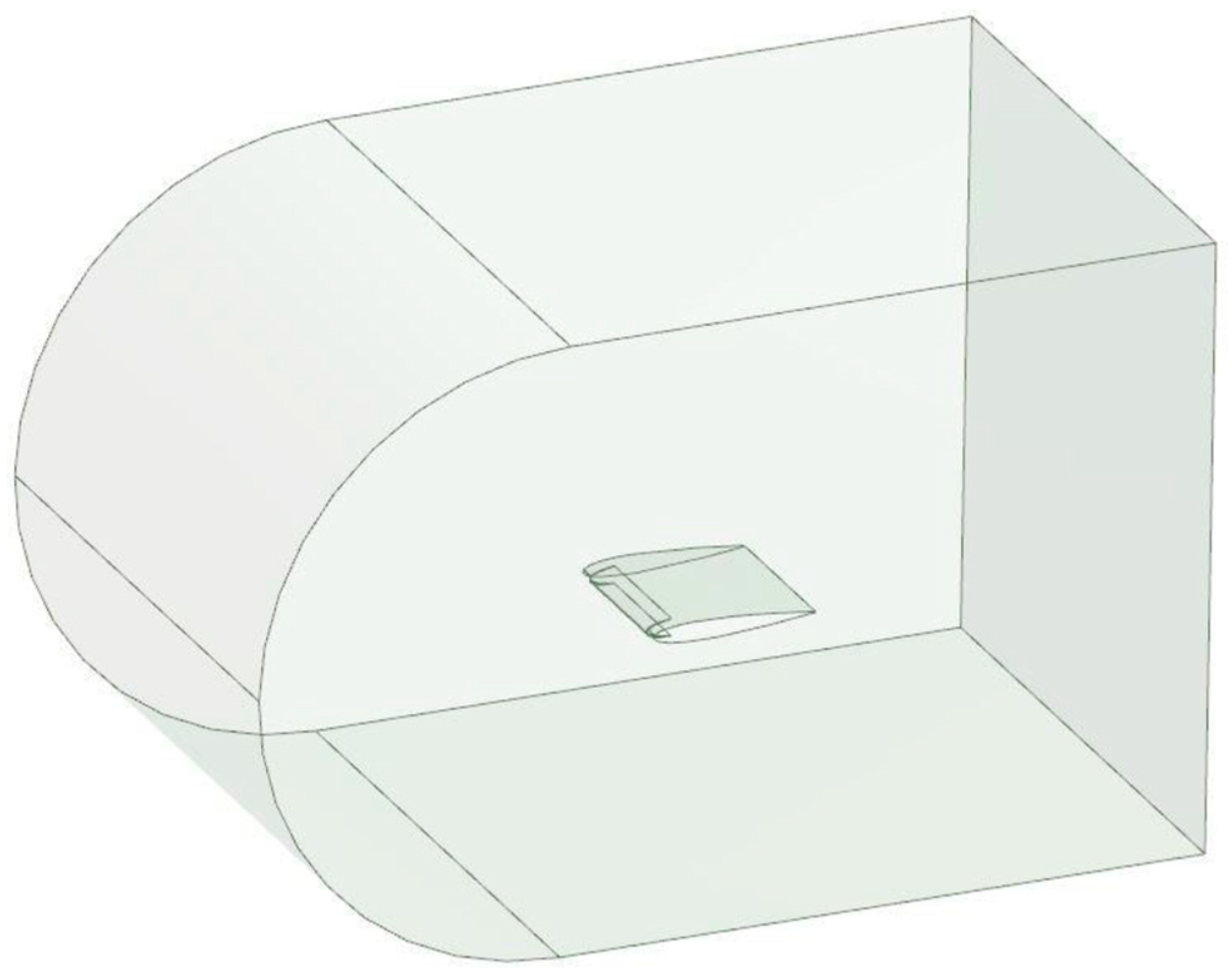
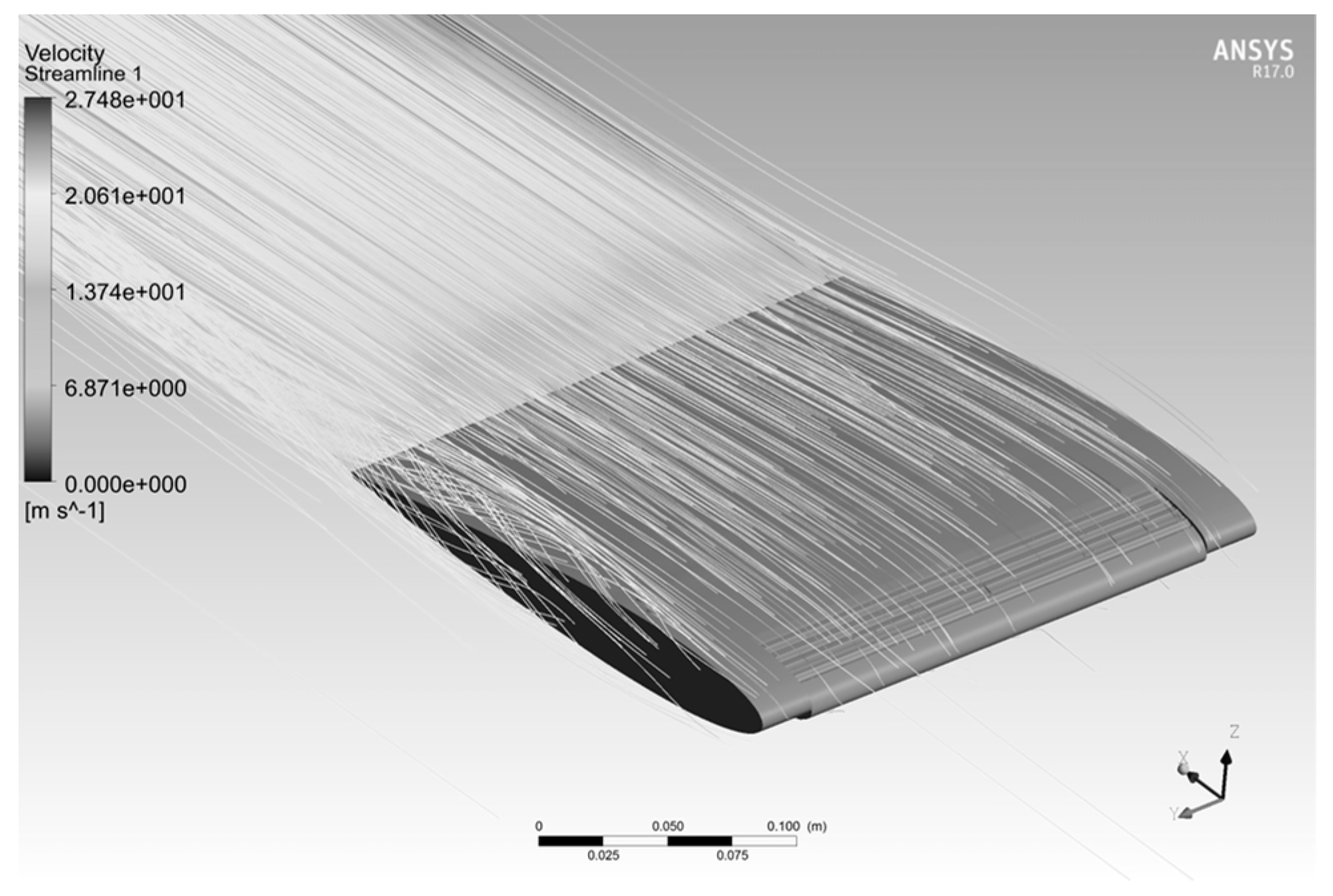
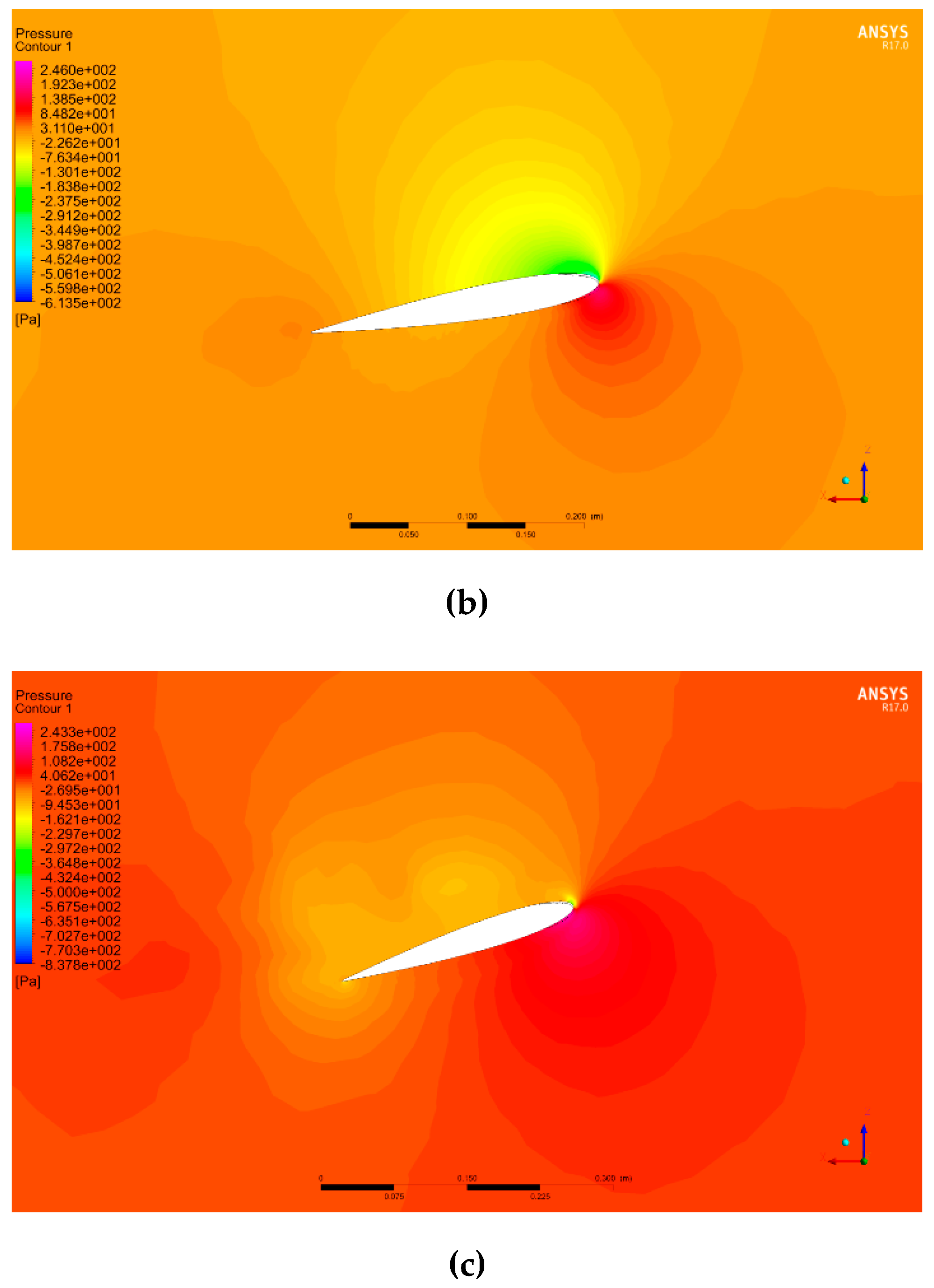
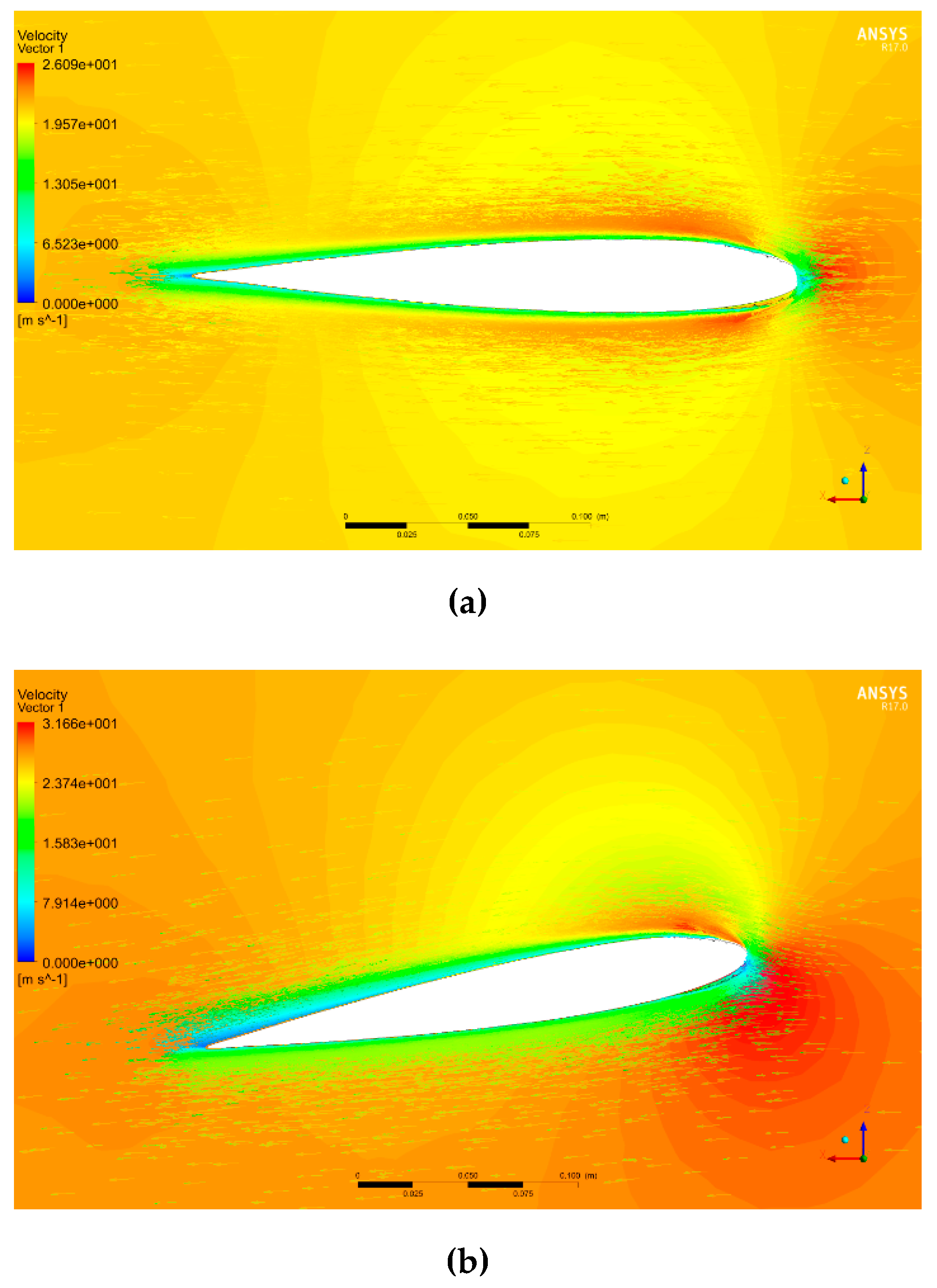
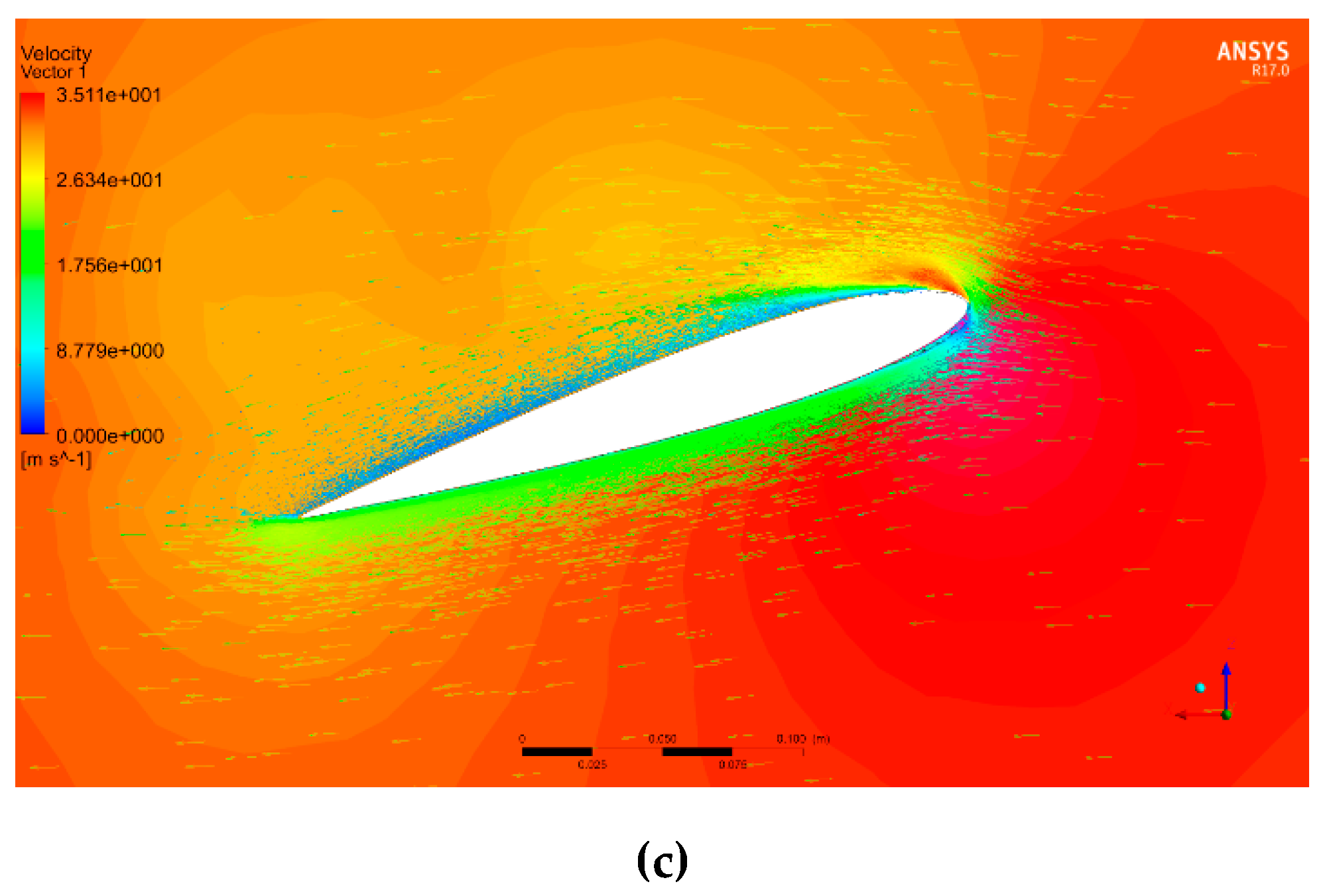
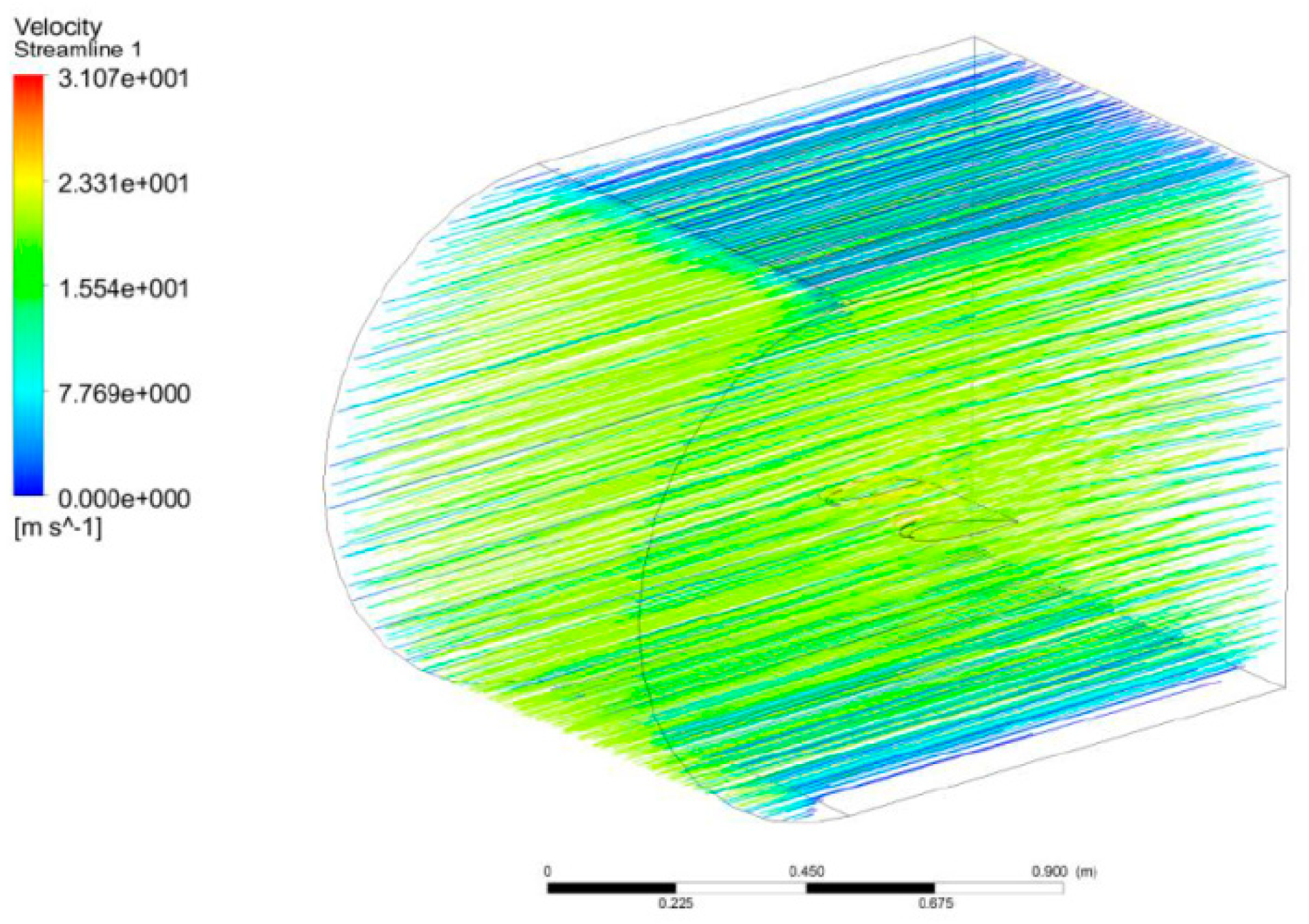
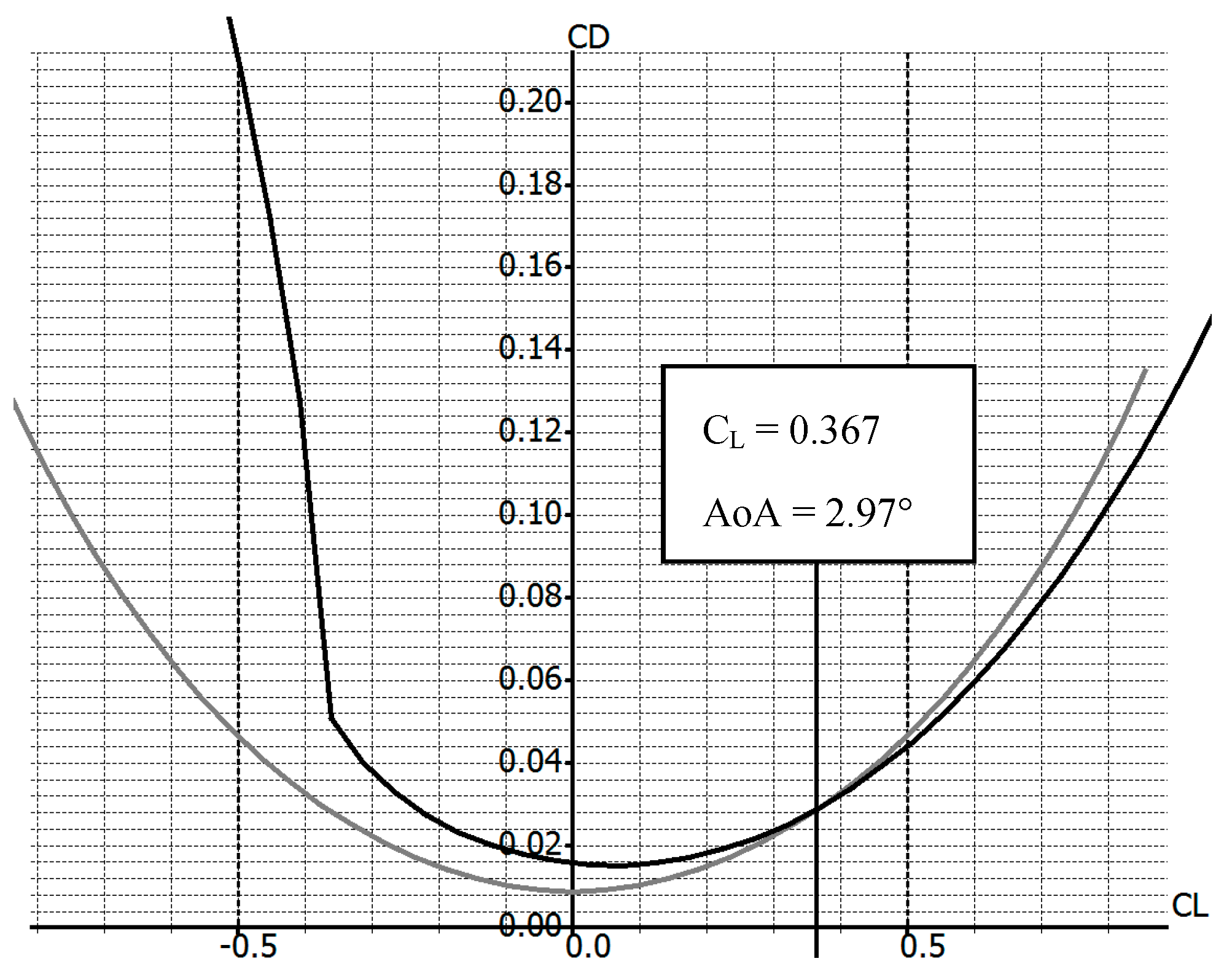
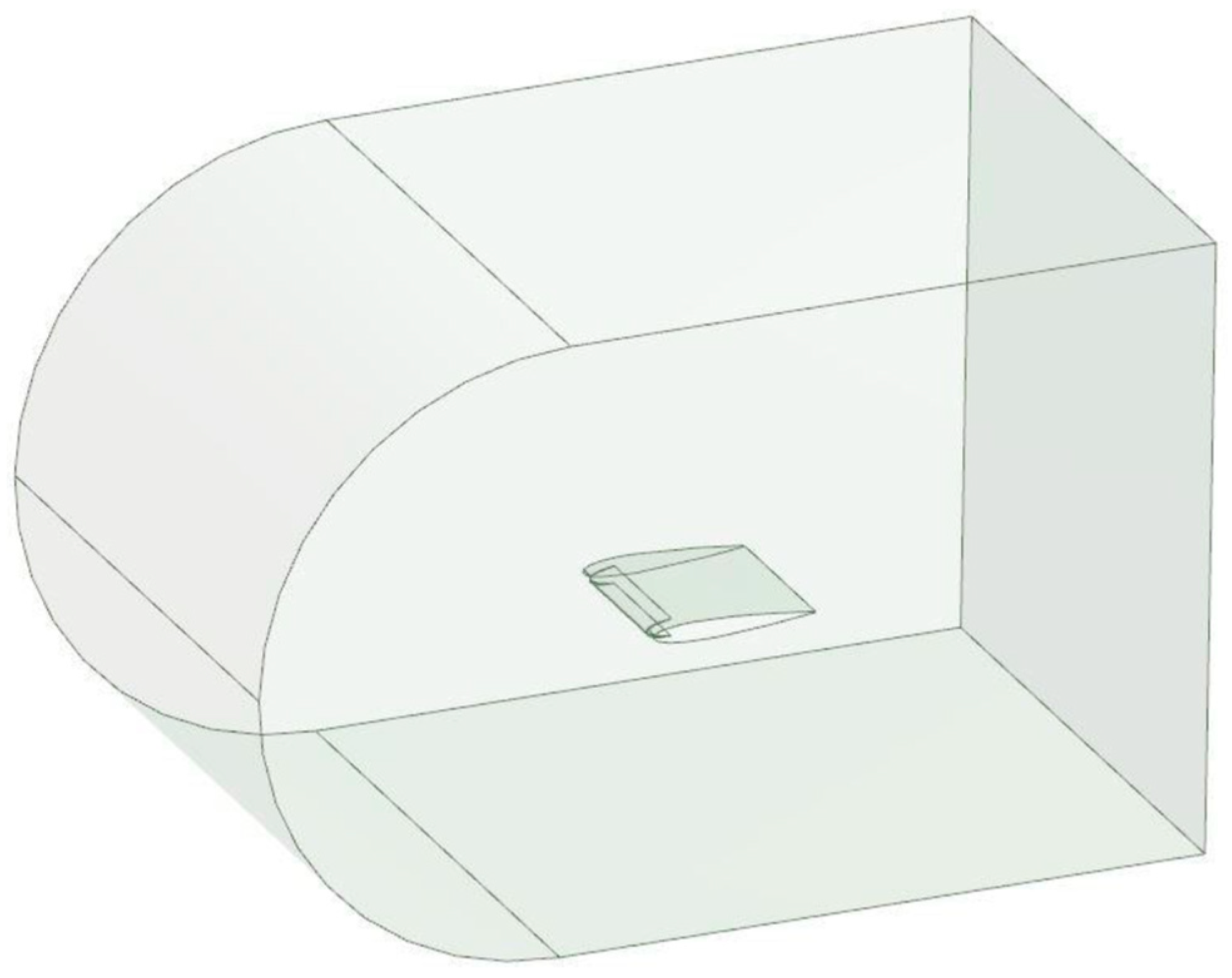
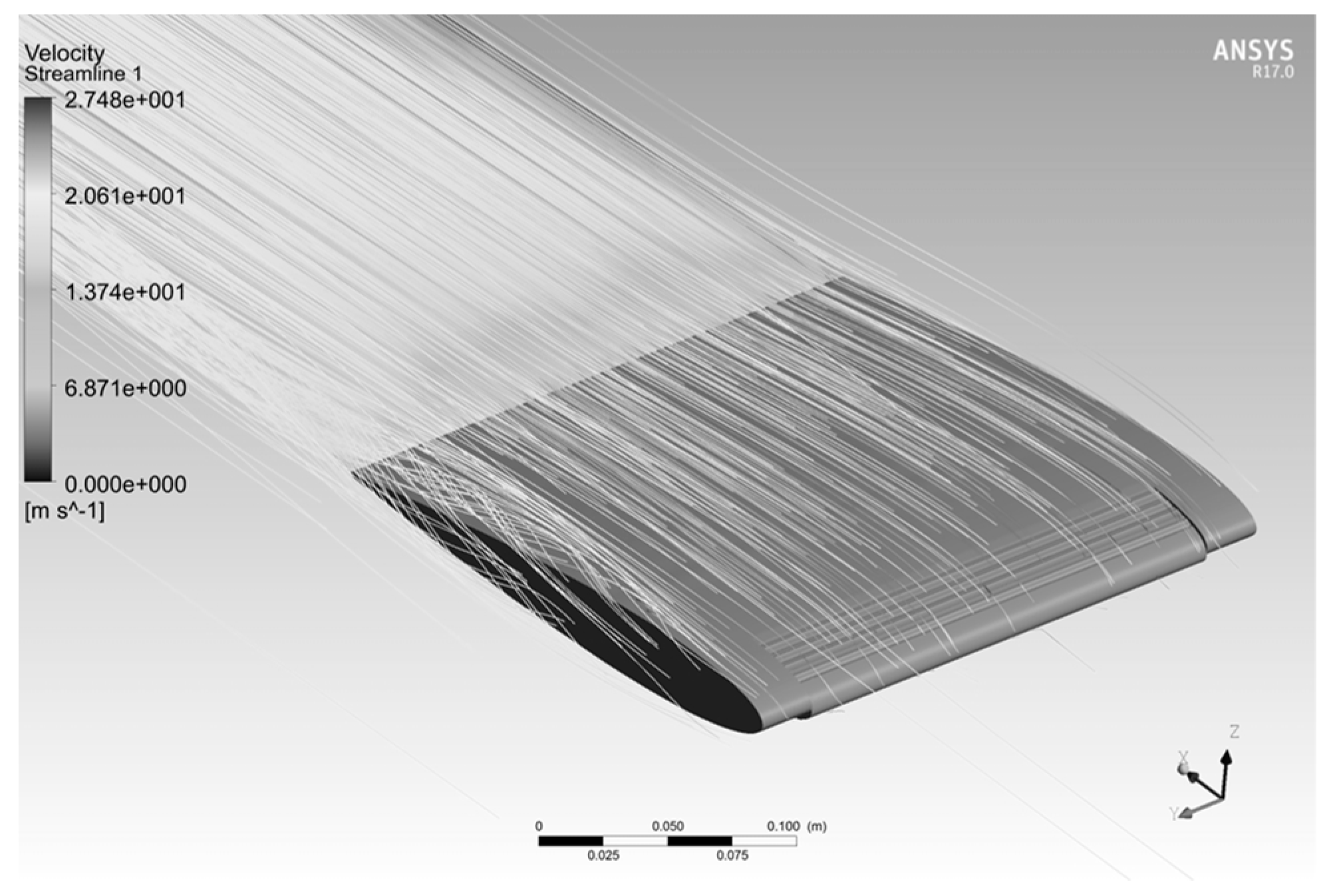
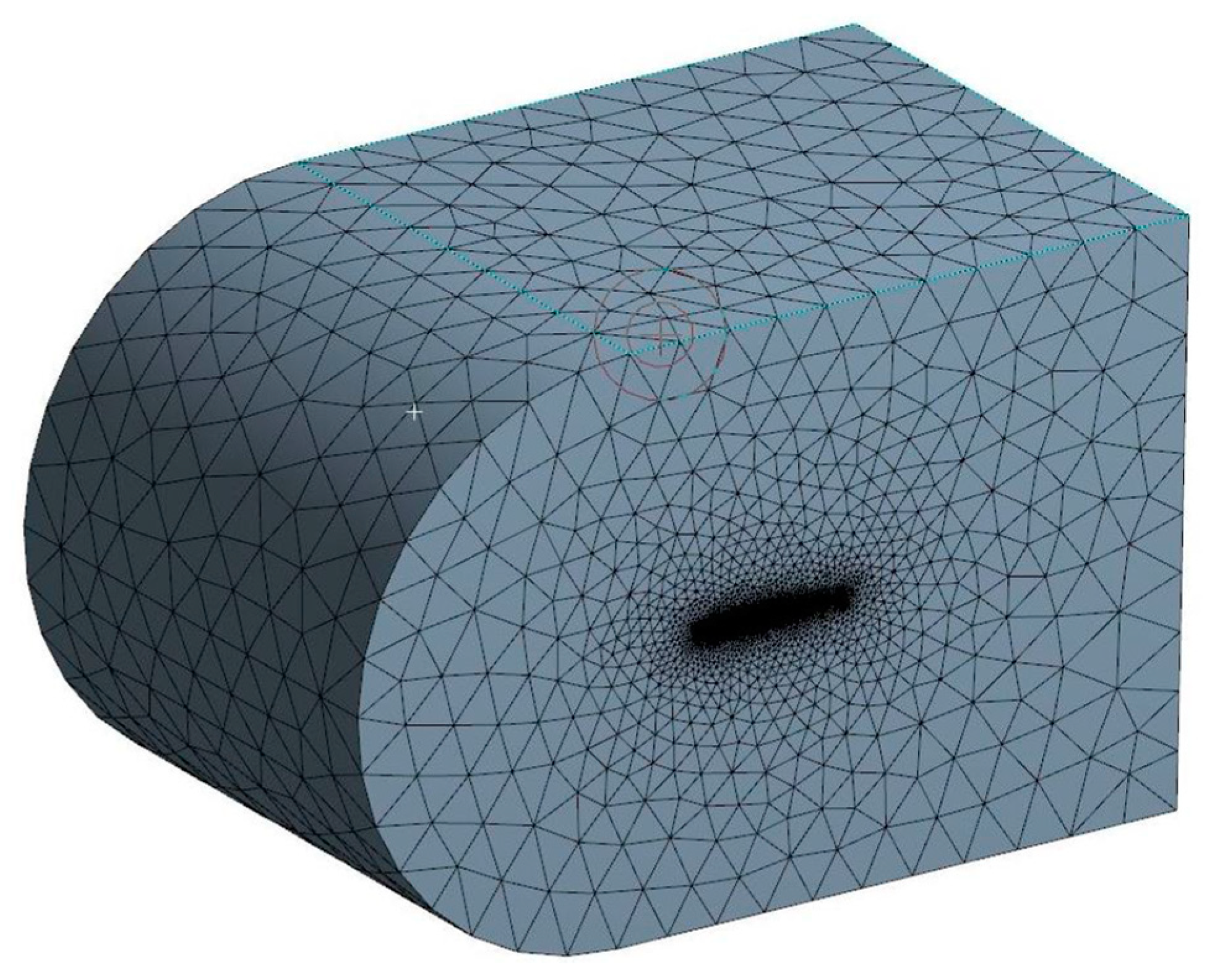
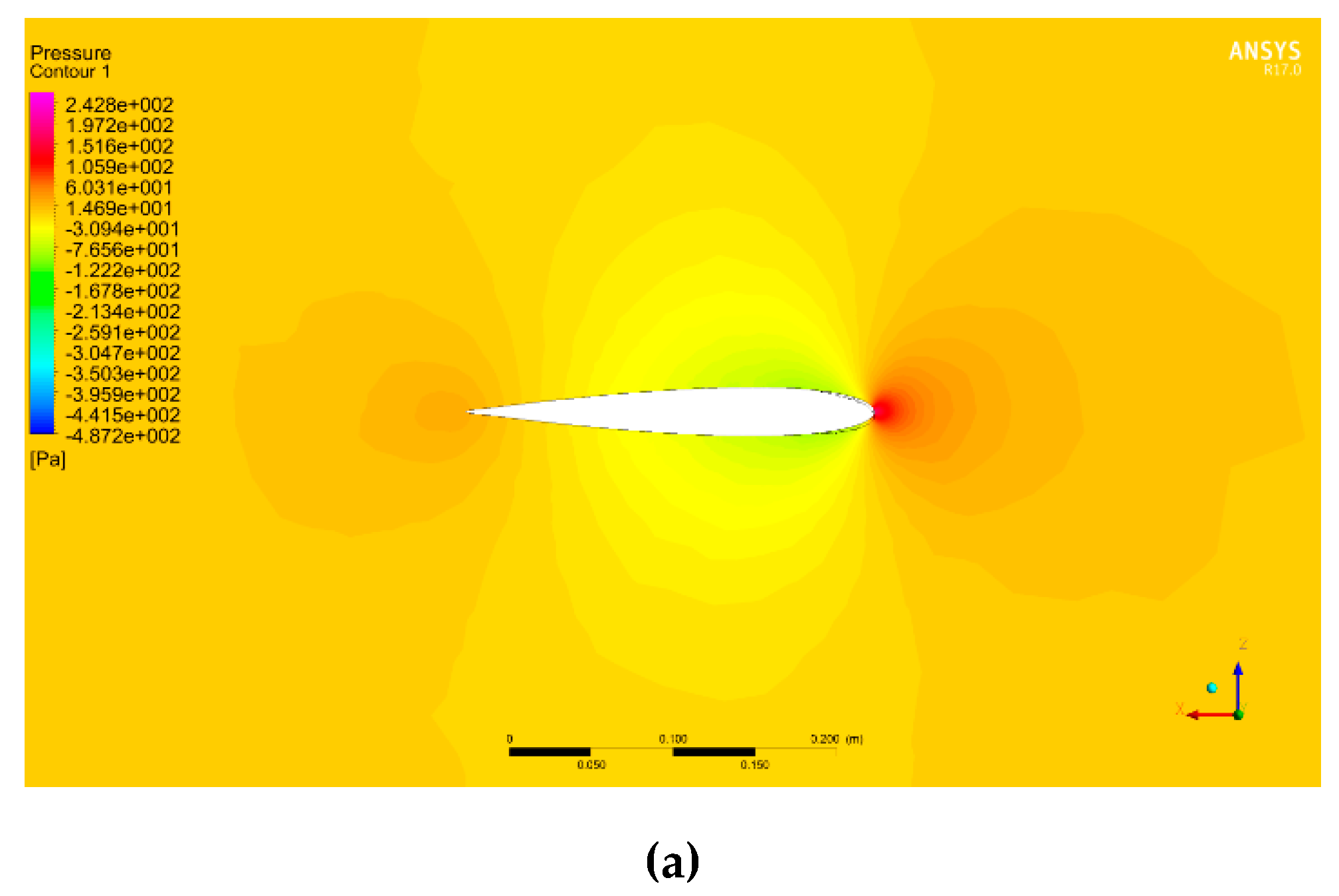
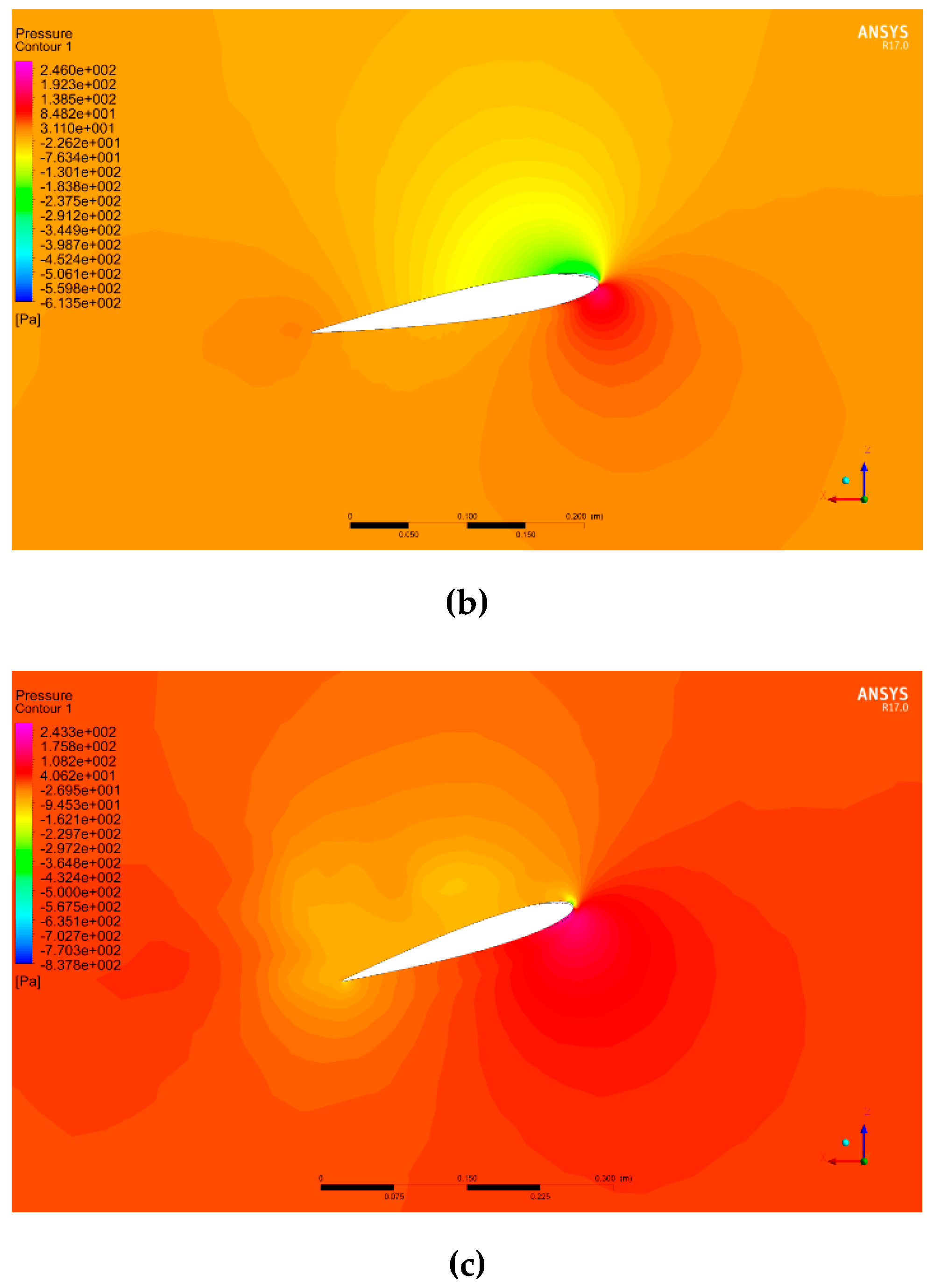
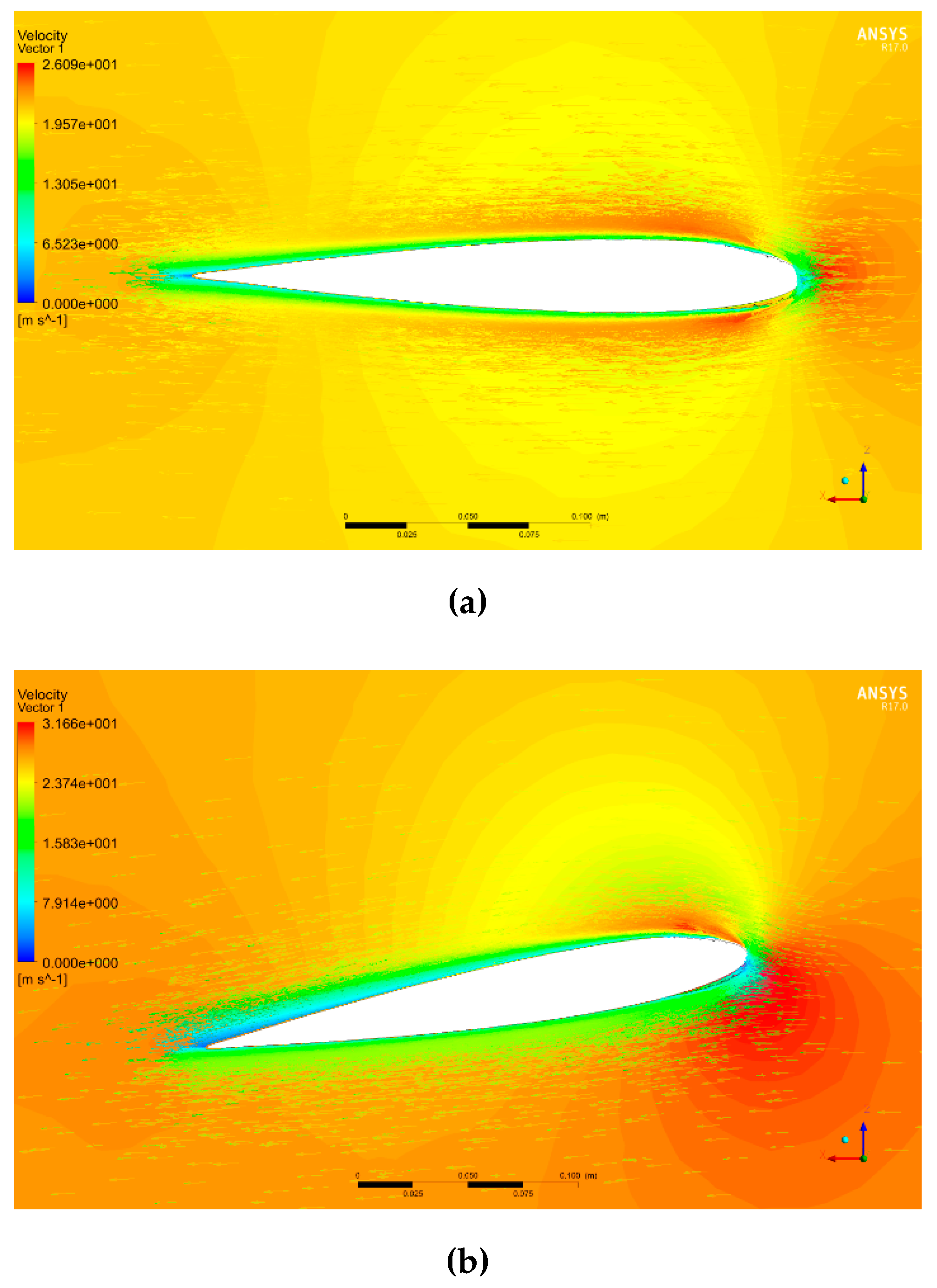
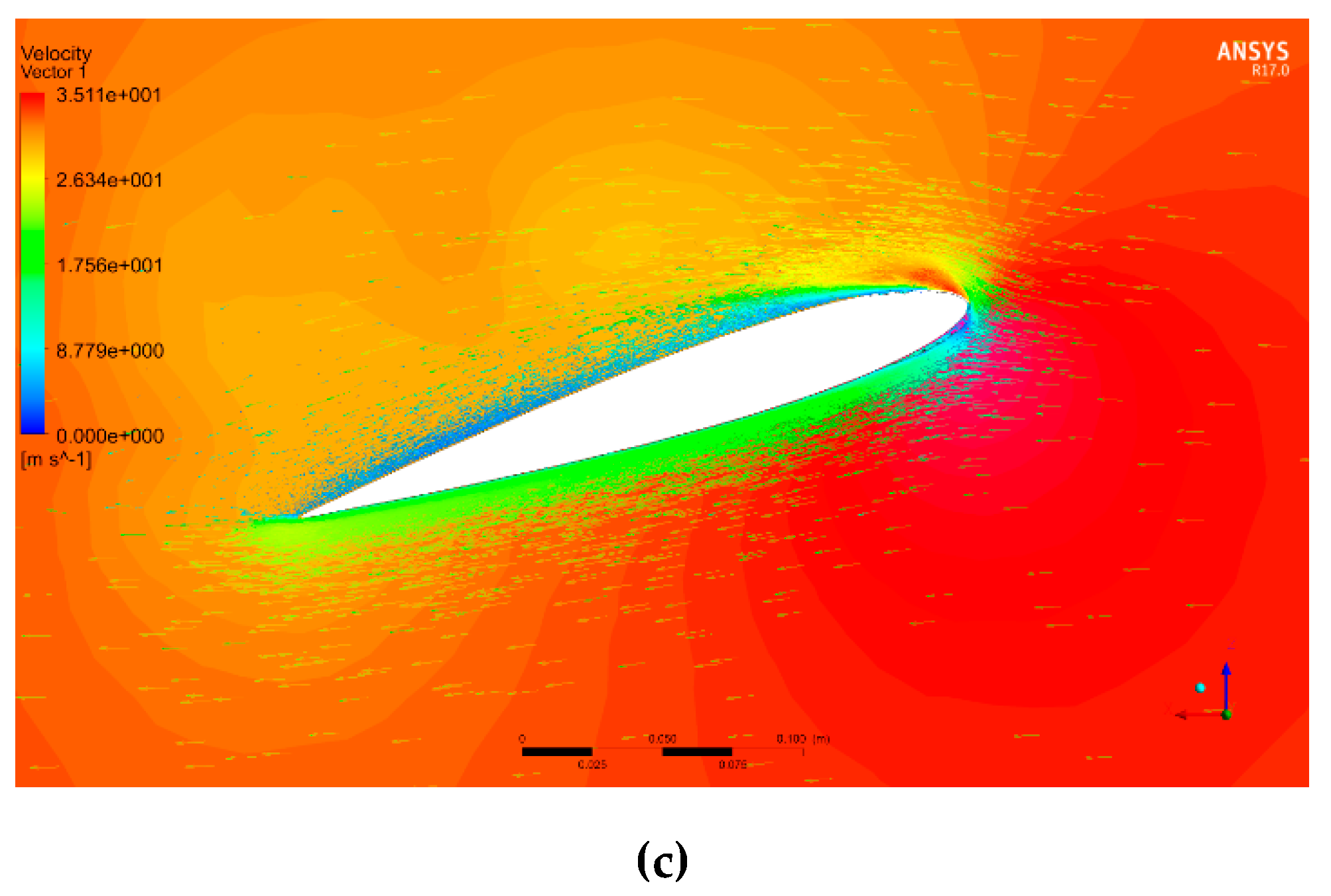
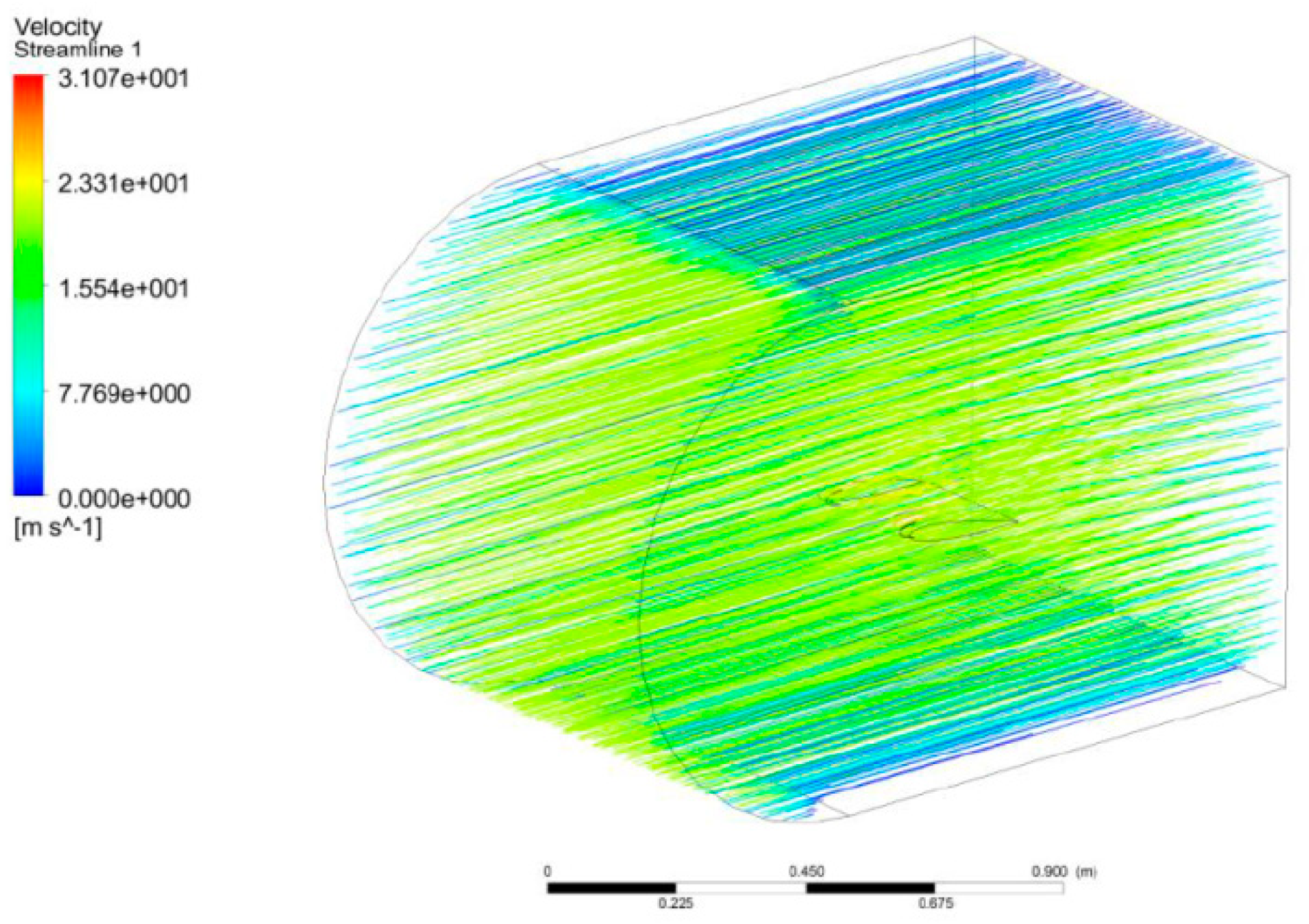
6. Aerodynamic Simulation of the Wing
7. Conclusion and Further Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Communier, D.; Botez, R.; Wong, T. Experimental Validation of a New Morphing Trailing Edge System using Price - Païdoussis Wind Tunel Tests. Chin. J. Aeronaut. 2019, 32, 1353–1366. [Google Scholar] [CrossRef]
- Andre, T.; Communier, D.; Flores, M.; Botez, R.; Moyao, O.C.; Wong, T.; Gauthier, G. Mesure de l′influence d′un aileron sur le comportement aérodynamique en soufflerie. Substance ÉTS. 2017. Available online: https://substance.etsmtl.ca/influence-aileron-comportement-aerodynamique-soufflerie (accessed on 7 October 2019).
- Sodja, J.; Martinez, M.J.; Simpson, J.C.; de Breuker, R. Experimental evaluation of the morphing leading edge concept. In Proceedings of the 23rd AIAA/AHS Adaptive Structures Conference, Kissimmee, FL, USA, 5–9 January 2015. [Google Scholar]
- Rudenko, A.; Radestock, M.; Monner, H.P. Optimization, Design and Structural Testing of a High Deformable Adaptive Wing Leading Edge. In Proceedings of the 24th AIAA/AHS Adaptive Structures Conference, San Diego, CA, USA, 4–8 January 2016. [Google Scholar]
- Radestock, M.; Riemenschneider, J.; Monner, H.P.; Huxdorf, O.; Werter, N.P.; de Breuker, R. Deformation Measurement in the Wind Tunnel for an UAV Leading Edge with a Morphing Mechanism. In Proceedings of the 30th Congress of International Council of the Aeronautical Sciences, Daejeon, Korea, 26–30 September 2016. [Google Scholar]
- Takahashi, H.; Yokozeki, T.; Hirano, Y. Development of Variable Camber Wing with Morphing Leading and Trailing Sections using Corrugated Structures. J. Intell. Mater. Syst. Struct. 2016, 27, 2827–2836. [Google Scholar] [CrossRef]
- Popov, A.V.; Grigorie, L.T.; Botez, R.M.; Mamou, M.; Mebarki, Y. Closed-Loop Control Validation of a Morphing Wing using Wind Tunnel Tests. J. Aircr. 2010, 47, 1309–1317. [Google Scholar] [CrossRef]
- Kammegne, M.J.T.; Grigorie, L.T.; Botez, R.M.; Koreanschi, A. Design and wind tunnel experimental validation of a controlled new rotary actuation system for a morphing wing application. Proc. Inst. Mech. Eng. Part G J. Aerosp. 2016, 230, 132–145. [Google Scholar] [CrossRef]
- Koreanschi, A.; Gabor, O.Ş.; Ayrault, T.; Botez, R.M.; Mamou, M.; Mebarki, Y. Numerical Optimization and Experimental Testing of a Morphing Wing with Aileron System. In Proceedings of the 24th AIAA/AHS Adaptive Structures Conference, San Diego, CA, USA, 4–8 January 2016. [Google Scholar]
- Koreanschi, A.; Sugar-Gabor, O.; Botez, R.M. Drag Optimisation of a Wing equipped with a Morphing Upper Surface. Aeronaut. J. 2016, 120, 473–493. [Google Scholar] [CrossRef]
- Botez, R.M.; Koreanschi, A.; Gabor, O.S.; Mebarki, Y.; Mamou, M.; Tondji, Y.; Amoroso, F.; Pecora, R.; Lecce, L.; Amendola, G.; et al. Numerical and experimental testing of a morphing upper surface wing equipped with conventional and morphing ailerons. In Proceedings of the 55th AIAA Aerospace Sciences Meeting, Grapevine, TX, USA, 9–13 January 2017. [Google Scholar]
- Concilio, A.; Dimino, I.; Pecora, R.; Ciminello, M. Structural Design of an Adaptive Wing Trailing Edge for Enhanced Cruise Performance. In Proceedings of the 24th AIAA/AHS Adaptive Structures Conference, San Diego, CA, USA, 4–8 January 2016. [Google Scholar]
- Pecora, R.; Barbarino, S.; Concilio, A.; Lecce, L.; Russo, S. Design and Functional Test of a Morphing High-Lift Device for a Regional Aircraft. J. Intell. Mater. Syst. Struct. 2011, 22, 1005–1023. [Google Scholar] [CrossRef]
- Michaud, F.; Joncas, S.; Botez, R.M. Design, Manufacturing and Testing of a Small-Scale Composite Morphing Wing. In Proceedings of the 19th International Conference on Composite Materials, Montreal, QC, Canada, 28 July–2 August 2013. [Google Scholar]
- Gabor, O.S.; Koreanschi, A.; Botez, R.M. Low-Speed Aerodynamic Characteristics Improvement of ATR 42 Airfoil using a Morphing Wing Approach. In Proceedings of the IECON 2012-38th Annual Conference on IEEE Industrial Electronics Society, Montreal, QC, Canada, 25–28 October 2012. [Google Scholar]
- Howell, L.L. Compliant Mechanisms; John Wiley & Sons, Inc.: New York, NY, USA, 2001. [Google Scholar]
- Communier, D.; Salinas, M.F.; Moyao, O.C.; Botez, R.M. Aero Structural Modeling of a Wing using CATIA V5 and XFLR5 Software and Experimental Validation using the Price-Païdoussis Wing Tunnel. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference, Dallas, TX, USA, 22–26 June 2015. [Google Scholar]
- Communier, D.; Botez, R.M.; Tony, W. Aero-structural analysis - Creation of a wing assembly with non-linear aerodynamic pressure distribution on its surface. In Proceedings of the CASI AERO 2017, Toronto, ON, USA, 16–18 May 2017. [Google Scholar]
- Kammegne, M.J.T.; Grigorie, T.L.; Botez, R.M.; Koreanschi, A. Design and Validation of a Position Controller in the Price-Païdoussis Wind Tunnel. In Proceeding of Modelling, Simulation and Control IASTED Conference, Banff, AB, Canada, 16–17 July 2014. [Google Scholar]
- Koreanschi, A.; Sugar-Gabor, O.; Botez, R.M. Numerical and Experimental Validation of a Morphed Wing Geometry using Price-Païdoussis Wind-Tunnel Testing. Aeronaut. J. 2016, 120, 757–795. [Google Scholar] [CrossRef]
- Mosbah, A.B.; Salinas, M.F.; Botez, R.M.; Dao, T.-M. New Methodology for Wind Tunnel Calibration using Neural Networks-EGD Approch. SAE Int. J. Aerosp. 2013, 6, 761–766. [Google Scholar] [CrossRef]
- Machetto, A.; Communier, D.; Botez, R.; Moyao, O.C.; Wong, T. Automatisation du changement d′angle d′une aile dans la soufflerie Price--Païdoussis du LARCASE. Substance ÉTS. 2017. Available online: http://substance.etsmtl.ca/balance-aerodynamique (accessed on 7 October 2019).
- Renukumar, B.; Bramkamp, F.D.; Hesse, M.; Ballmann, J. Effect of Flap and Slat Riggings on 2-D High-Lift Aerodynamics. J. Aircr. 2006, 43, 1259–1271. [Google Scholar]
- Triet, N.M.; Ngoc, V.N.; Thang, P.M. Aerodynamic Analysis of Aircraft Wing. VNU J. Sci. Math.-Phys. 2015, 31, 68–75. [Google Scholar]
- Noor, M.; Wandel, A.P.; Yusaf, T. Detail Guide for CFD on the Simulation of Biogas Combustion in Bluff-Body Mild Burner. In Proceedings of the 2nd International Conference of Mechanical Engineering Research (ICMER 2013): Green Technology for Sustainable Environment, Pahang, Malaysia, 1–3 July 2013. [Google Scholar]
- Launder, B.E.; Spalding, D.B. The Numerical Computation of Turbulent Flows. Comput. Methods Appl. Mech. Eng. 1994, 3, 269–289. [Google Scholar] [CrossRef]
- Grisval, J.-P.; Liauzun, C.; Johan, Z. Aeroelasticity Simulations in Turbulent Flows. In Proceedings of the CEAS/AIAA/ICASE/NASA Langley International Forum on Aeroelasticity and Structural Dynamics 1999, Williamsburg, VA, USA, 22–25 June 1999. [Google Scholar]
- Liauzun, C. Assessment of CFD Techniques for Wind Turbine Aeroelasticity. In Proceedings of the ASME 2006 Pressure Vessels and Piping/ICPVT-11, Vancouvert, BC, Canada, 23–27 July 2006. [Google Scholar]
- Grisval, J.P.; Liauzun, C. Application of the Finite Element Method to Aeroelasticity. Rev. Eur. Des Éléments Finis 1999, 8, 553–579. [Google Scholar] [CrossRef]
- Patankar, S.V.; Spalding, D.B. Heat and Mass Transfer in Boundary Layers. Morgan-Grampian, Great Britain. 1968. [Google Scholar]
- Wolfshtein, M. The Velocity and Temperature Distribution in One-Dimensional Flow with Turbulence Augmentation and Pressure Gradient. Int. J. Heat Mass Transf. 1969, 12, 301–318. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Slit Number | e (in) | t (in) | l (in) | p (in) | L (in) | MLE Angle (rad) | y (in) |
|---|---|---|---|---|---|---|---|
| 1 | 0.579 | 0.055 | 0.012 | 0.262 | 0.436 | 0.046 | 0.020 |
| 2 | 0.682 | 0.070 | 0.014 | 0.306 | 0.623 | 0.046 | 0.029 |
| 3 | 0.765 | 0.085 | 0.018 | 0.340 | 0.817 | 0.053 | 0.043 |
| 4 | 0.842 | 0.100 | 0.021 | 0.371 | 1.037 | 0.057 | 0.059 |
| 5 | 0.902 | 0.115 | 0.024 | 0.394 | 1.258 | 0.061 | 0.077 |
| 6 | 0.957 | 0.130 | 0.026 | 0.413 | 1.507 | 0.063 | 0.095 |
| Motor Type | Bipolar Stepper | Recommended Voltage | 12 V DC |
|---|---|---|---|
| Manufacturer Part Number | 57STH56-2804MB | Rated Current | 2.8 A |
| Step Angle | 0.9° | Coil Resistance | 900 mΩ |
| Step Accuracy | ±5% | Phase Inductance | 4.5 mH |
| Holding Torque | 12 kg cm | Shaft Diameter | 1/4” |
| Rated Torque | 11.2 kg cm | Rear Shaft Diameter | 3.9 mm |
| Maximum Motor Speed | 2150 RPM | Mounting Plate Size | NEMA23 |
| Acceleration at Max Speed | 80 0001/16 steps/sec² | Weight | 695 g |
| Number of Leads | 4 | Wire Length | 300 mm |
| SI-1000-120 US-200-1000 | Fx, Fy | Fz | Tx, Ty | Tz |
|---|---|---|---|---|
| Sensing Ranges | 1000 N (200 lbf) | 2500 N (500 lbf) | 120 Nm 1000 lbf-in | 120 Nm 1000 lbf-in |
| Resolution | 1/4 N 1/32 lbf | 1/4 N 1/16 lbf-in | 1/40 Nm 1/8 lbf-in | 1/80 Nm 1/8 lbf-in |
| Motor Type | Bipolar Stepper | Available Current per Coil Max | 4 A |
|---|---|---|---|
| Number of Motor Ports | 1 | Supply Voltage Min | 10 V DC |
| Motor Position Resolution | 1/16 Step (40-Bit Signed) | Supply Voltage Max | 30 V DC |
| Position Max | ±1E+15 1/16 steps | Current Consumption Min | 25 mA |
| Stepper Velocity Resolution | 1 1/16 steps/sec | Power Jack | 5.5 × 2.1 mm Center Positive |
| Stepper Velocity Max | 250,000 1/16 steps/sec | Recommended Wire Size (Motor Terminal) | 12 to 26 AWG |
| Stepper Acceleration Resolution | 1 1/16 steps/sec² | Recommended Wire Size (Power Terminal) | 12 to 26 AWG |
| Stepper Acceleration Min | 2 1/16 steps/sec² | Operating Temperature Min | −20 °C |
| Stepper Acceleration Max | 1E+07 1/16 steps/sec² | Operating Temperature Max | 85 °C |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Communier, D.; Le Besnerais, F.; Botez, R.M.; Wong, T. Design, Manufacturing, and Testing of a New Concept for a Morphing Leading Edge using a Subsonic Blow Down Wind Tunnel. Biomimetics 2019, 4, 76. https://doi.org/10.3390/biomimetics4040076
Communier D, Le Besnerais F, Botez RM, Wong T. Design, Manufacturing, and Testing of a New Concept for a Morphing Leading Edge using a Subsonic Blow Down Wind Tunnel. Biomimetics. 2019; 4(4):76. https://doi.org/10.3390/biomimetics4040076
Chicago/Turabian StyleCommunier, David, Franck Le Besnerais, Ruxandra Mihaela Botez, and Tony Wong. 2019. "Design, Manufacturing, and Testing of a New Concept for a Morphing Leading Edge using a Subsonic Blow Down Wind Tunnel" Biomimetics 4, no. 4: 76. https://doi.org/10.3390/biomimetics4040076