1. Introduction
In recent years, unmanned aerial vehicles (UAVs) have gained significant popularity owing to their portability [
1], cost-effectiveness [
2], and maneuverability [
3]. These characteristics render UAVs particularly suitable for specialized missions including reconnaissance [
4], search and rescue operations [
5,
6], aerial mapping [
7], and military precision strikes [
8]. Target localization [
9], key to these tasks, primarily involves estimating target positions through onboard sensors. However, UAV operational capabilities are constrained by limited payload capacity and endurance, restricting the deployment of heavy or high-power sensors [
10]. Consequently, lightweight sensors have become the predominant solution for such scenarios.
While lightweight sensors demonstrate distinct advantages in specific scenarios, they are typically limited to measuring the bearing or line-of-sight angle. These measurements are frequently compromised by sensor bias [
11] and measurement noise [
12], constituting the typical bearing-only target localization problem [
13]. Doğançay and Kutluyıl [
14] proposed a total least-squares algorithm for the bearing-only target localization problem. Frew and Eric [
15] established the necessary conditions for bearing-only target localization, providing a rigorous theoretical foundation. The target position is estimated via a filtering approach that incorporates bearing information. The Kalman filter, in particular, offers significant advantages in handling white noise [
16]. In [
17], a novel ensemble Kalman filter was proposed for target localization with bearing-only measurement.
Given that the relative position relationship between the UAV and the target directly influences the performance of state estimation [
18], optimizing the UAV trajectory is essential to improve the accuracy of target localization. Nardone, Aidala [
19], and Hammel [
20] derived the observability conditions for two-dimensional target localization, demonstrating that UAV acceleration must satisfy particular requirements to guarantee sufficient observability. This seminal work established the theoretical foundation for subsequent advancements in bearing-only target localization research. To enhance two-spacecraft observability, Zhou [
21] proposed adding a third spacecraft, with an extended Kalman filter validating the improved observability convergence relationship through numerical simulations. In [
22], a reinforcement learning-based guidance system was developed for angles-only rendezvous and proximity operation missions while guaranteeing observability and safety through optimized trajectory planning and robust constraint satisfaction. An expanding corpus of scholarly work has emerged, focusing on enhancing state estimation accuracy through improved observability analysis techniques. Anjaly and Ratnoo [
23] derived an observability metric based on the Fisher information matrix and the Cramér–Rao lower bound to quantitatively assess UAV maneuver effectiveness. A notable advantage is the practical application to UAV rendezvous scenarios, where a cooperative leader maneuver is designed to maximize observability, supported by error ellipsoid plots that validate the analytical findings. Fujiwara [
24] extended this approach by integrating a quantitative observability metric derived from the Fisher information matrix, which was optimized as a cost function to enhance system observability. Its key innovative contributions include integrating the Fisher information matrix into the cost function to quantify observability and deriving semi-analytic gradients and Hessians for efficient convergence under impulsive maneuvers. Yang [
25] formulated a constrained framework for UAV trajectory optimization that maximizes the determinant of the observability Gramian matrix to enhance system observability. The main advantages over conventional calibration techniques are the systematic optimization of observability and real-time applicability, supported by numerical and experimental validation. He [
26] developed a geometric approach for UAV trajectory optimization with bearing-only measurements, employing the relative distance and separation angle as the cost function.
Existing approaches frequently disregard system process noise and assume ideal control conditions where a UAV can perfectly execute optimized trajectories through high-performance controllers. In practice, target observability is fundamentally governed by the UAV–target relative geometry [
27,
28], a relationship frequently compromised by process noise. Consequently, an observability analysis method that incorporates process noise is essential for UAV trajectory optimization. Ugrinovskii [
29] proposed an observability metric for stochastic systems based on the relative entropy functional. This metric quantifies the difference between two probability distributions and provides a theoretical foundation for evaluating system observability under uncertainty. In [
30], a method based on generalized polynomial chaos was employed for the observability analysis of stochastic systems. In [
31], a method based on the empirical observability Gramian was proposed for the observability analysis of stochastic nonlinear systems. The aforementioned methods characterize the impact of process noise on observability via the observability matrix. However, the approaches remain constrained by the observability matrix, resulting in diminished robustness against process noise disturbances. Consequently, it is unsuitable for UAV trajectory optimization in bearing-only target localization scenarios.
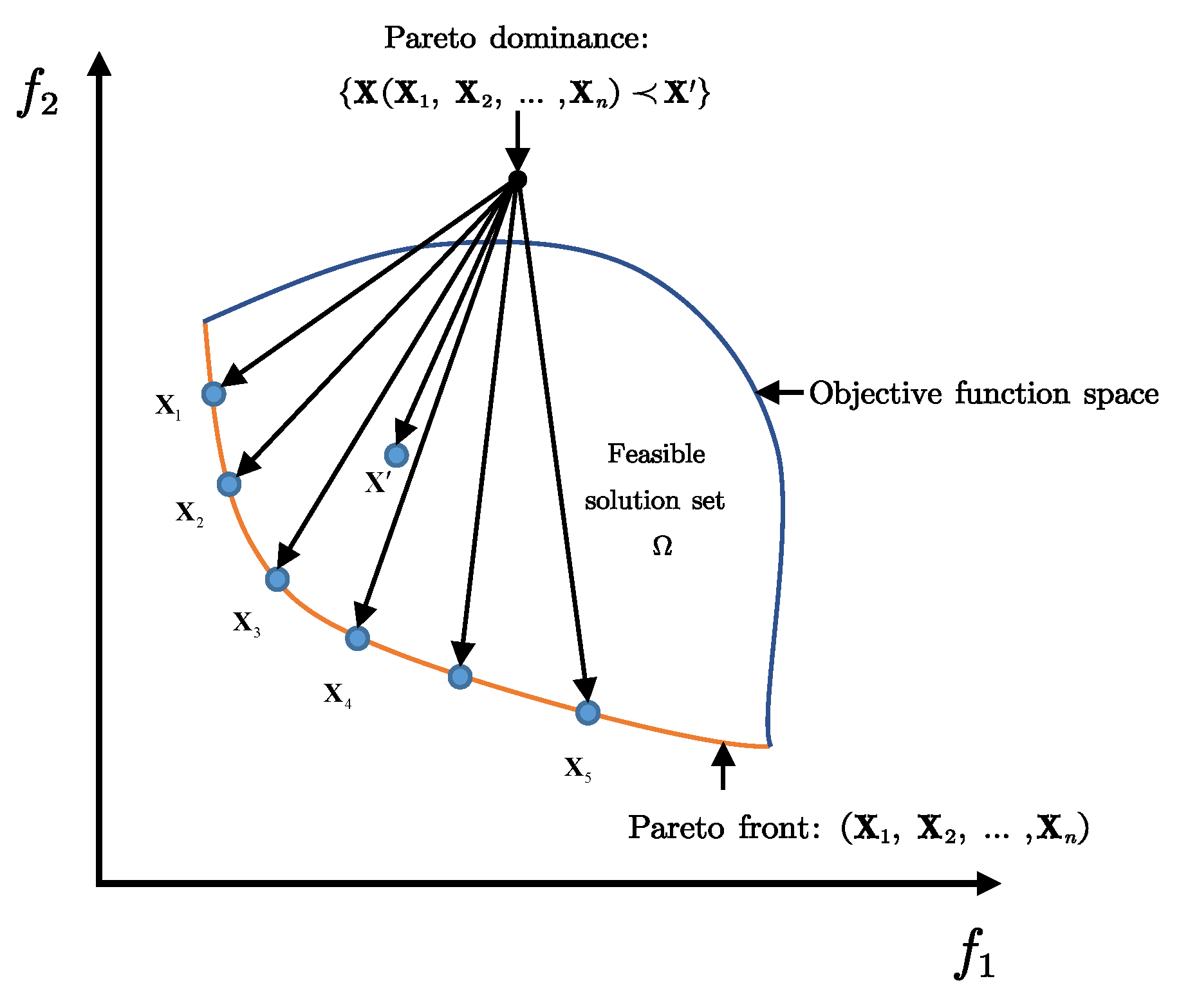
Additionally, trajectory optimization frequently requires a trade-off between observability and other performance metrics. These multi-objective optimization problems can be effectively addressed through metaheuristic algorithms (MHAs) [
32,
33,
34]. Nature-inspired MHAs address optimization problems by emulating biological behaviors or physical phenomena [
35]. These algorithms typically initialize with randomly generated populations, which then undergo iterative evolutionary processes. Through this approach, the population gradually converges [
36], ultimately yielding an approximate global optimum solution [
37]. Karimi and Pourtakdoust [
38] proposed a dynamic hybrid particle swarm optimization algorithm for real-time motion planning of UAVs in complex terrains with stochastic threats. Akopov [
39] developed a parallel biobjective real-coded genetic algorithm to address maneuverability challenges in multiagent fuzzy transportation systems with conflicting objectives: minimizing traffic accidents and maximizing traffic flow. Coleman [
40] developed a UAV trajectory optimization method employing control barrier functions to enhance target observability, where unobservable regions are modeled as constraints.
Inspired by the compound eye vision [
41,
42], this study presents a bio-inspired trajectory optimization method, that incorporates process noise, for bearing-only target localization. The contributions of this work are summarized as follows:
- (1)
Inspired by [
26,
43], we first derive the observability condition for a deterministic system through the geometric observability analysis method. The concept is subsequently extended to stochastic systems to establish the distributional observability condition. Finally, leveraging a data-driven approach, distributional observability is quantitatively analyzed through maximum mean discrepancy (MME). Based on the quantitative metrics of distributional observability, an optimization model for bearing-only target localization is proposed. The superiority of the proposed method is demonstrated through a comprehensive comparison with a traditional optimization model. The results demonstrate the performance and effectiveness of our approach in addressing the bearing-only target localization problem.
- (2)
We transform trajectory optimization into a multi-objective nonlinear programming problem, where the quantitative metric of distributional observability and the distance of the UAV relative to the target are utilized as the set of objective functions. The optimal set of decision variables (the UAV’s speed and turn rate), that satisfy the platform’s performance constraints, is determined by minimizing the defined objective functions. Drawing on the methodology proposed in [
44], a control barrier function is constructed as a nonlinear constraint to ensure the UAV remains outside unobservable regions.
- (3)
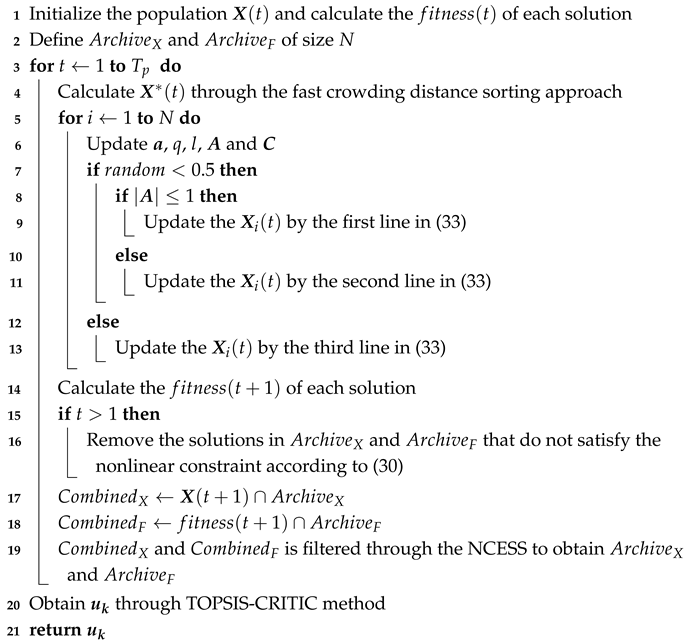
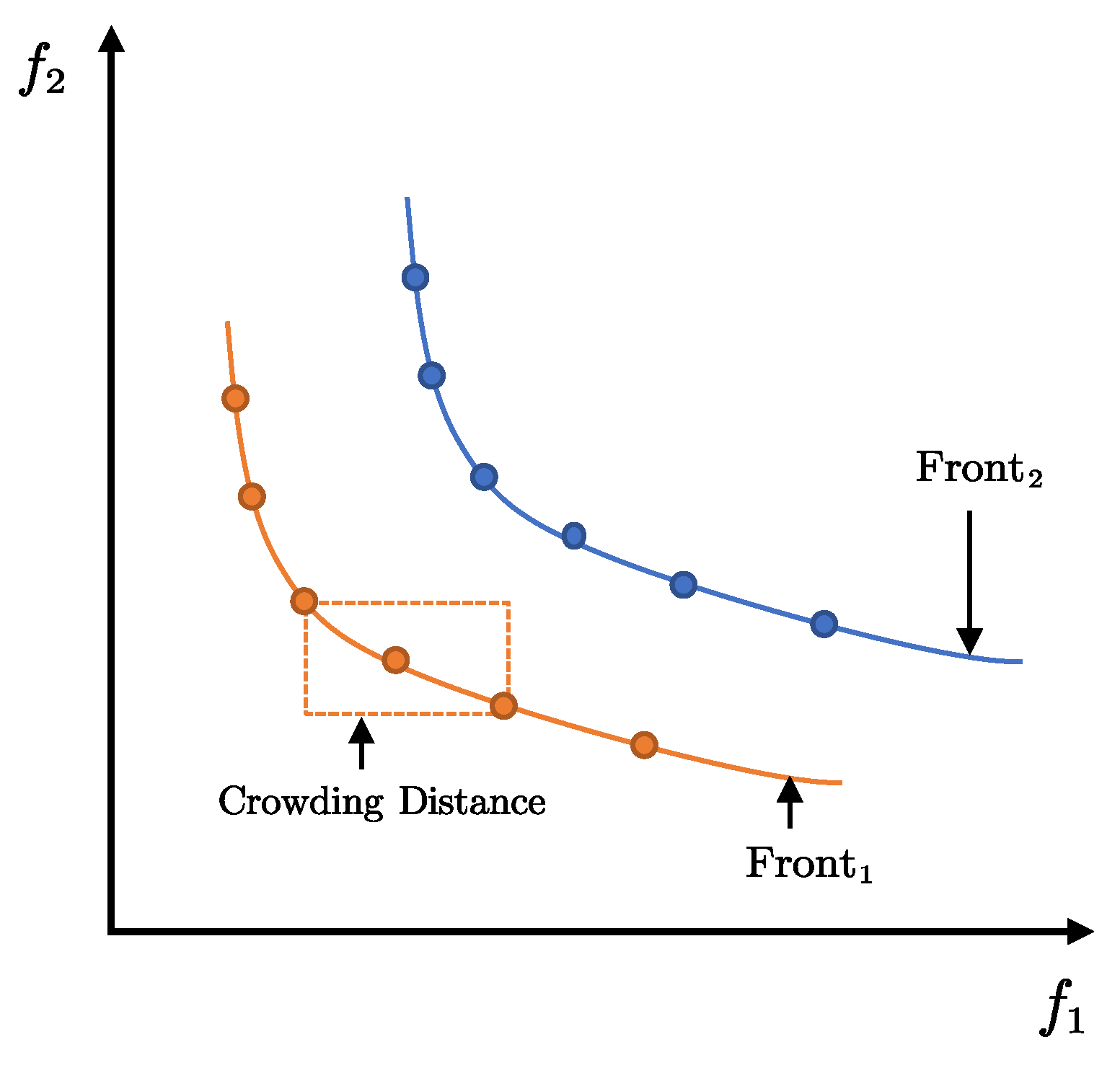
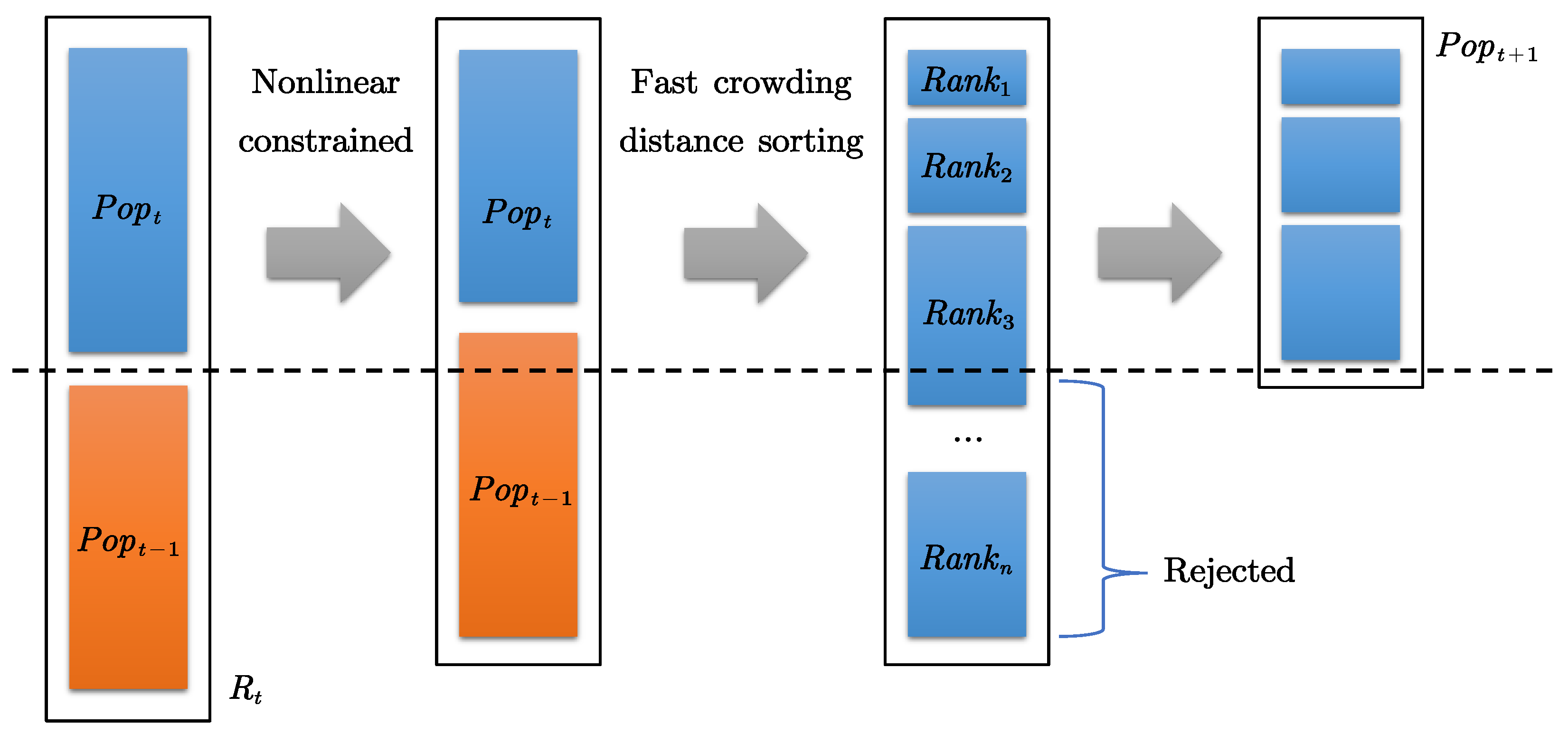
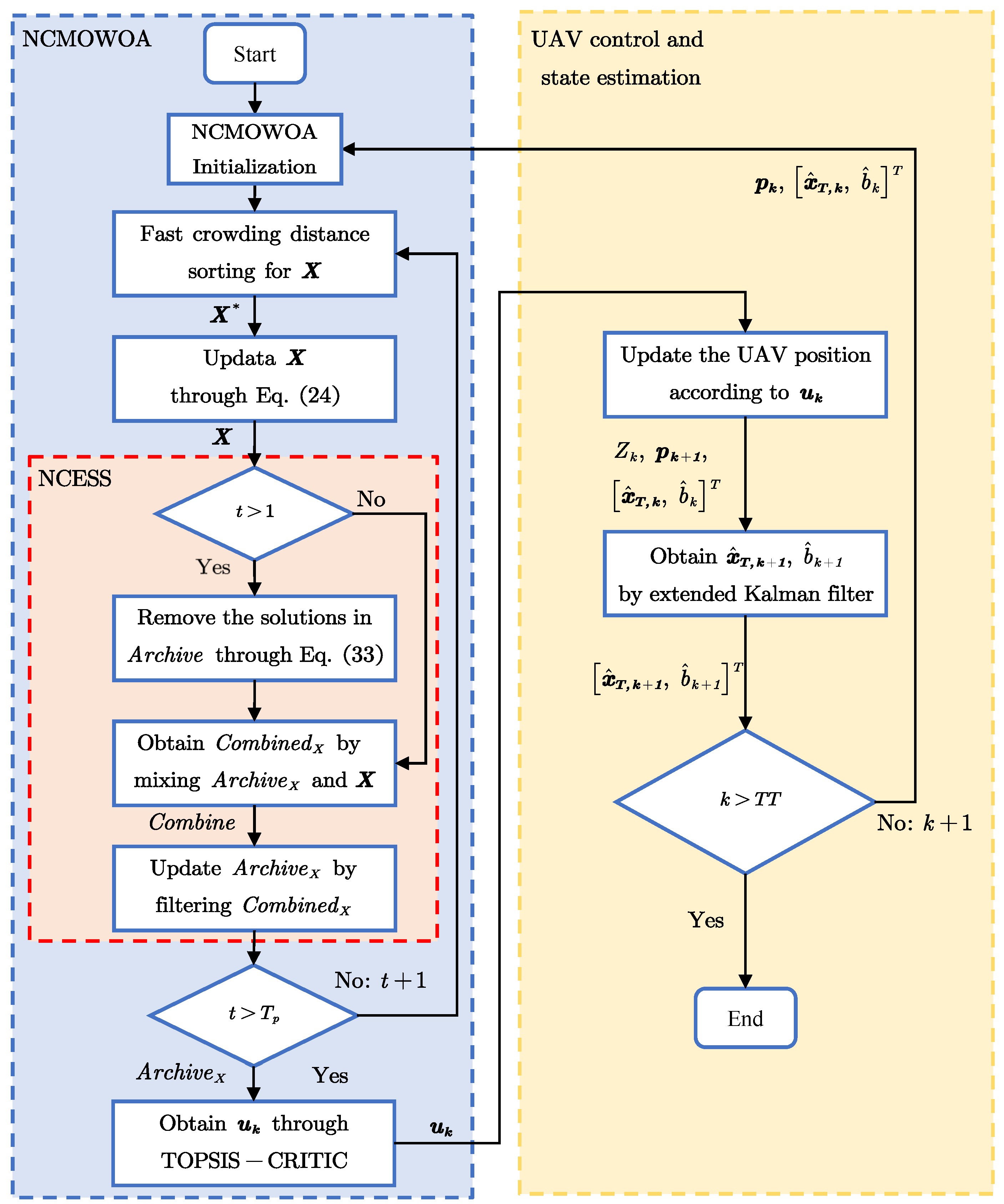
A nonlinear constrained multi-objective whale optimization algorithm (NCMOWOA) is proposed to address the multi-objective nonlinear programming problem. This algorithm improves the multi-objective whale optimization algorithm [
45] by incorporating a nonlinear constraint into the optimization model. Specifically, the nonlinear constrained elitist selection strategy (NCESS) is utilized to select solutions at each iteration, ensuring that the solutions satisfy the nonlinear constraint. In this study, the NCMOWOA is compared with several metaheuristic algorithms, including the multi-objective particle swarm optimization algorithm (MOPSOA) [
46], nondominated sorting genetic algorithm II (NSGA-II) [
47], multi-objective exponential distribution optimization algorithm (MOEDOA) [
48], and nondominated sorting genetic algorithm III (NSGA-III) [
49]. The comparative analysis demonstrates the performance of NCMOWOA in addressing bearing-only target localization problems.
The remainder of the paper is organized as follows:
Section 2 presents the kinematics and the measurement model for the UAV.
Section 3 improves the bio-inspired distributional observability analysis method and proposes a performance metric. In
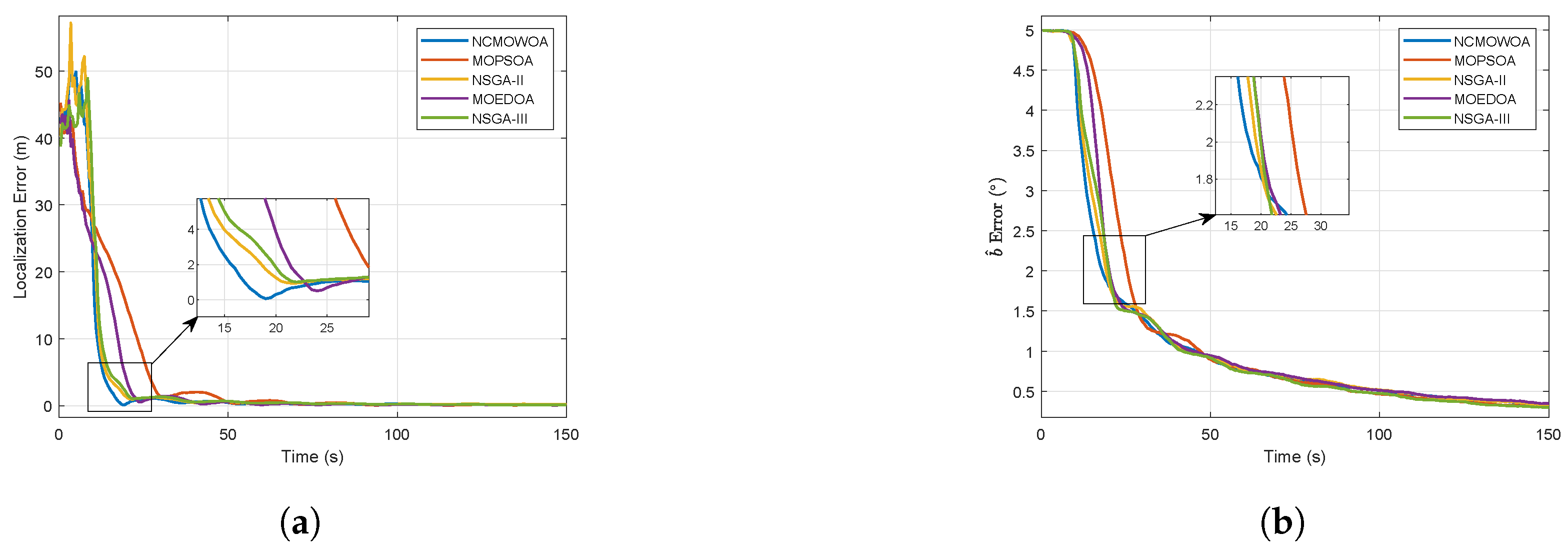
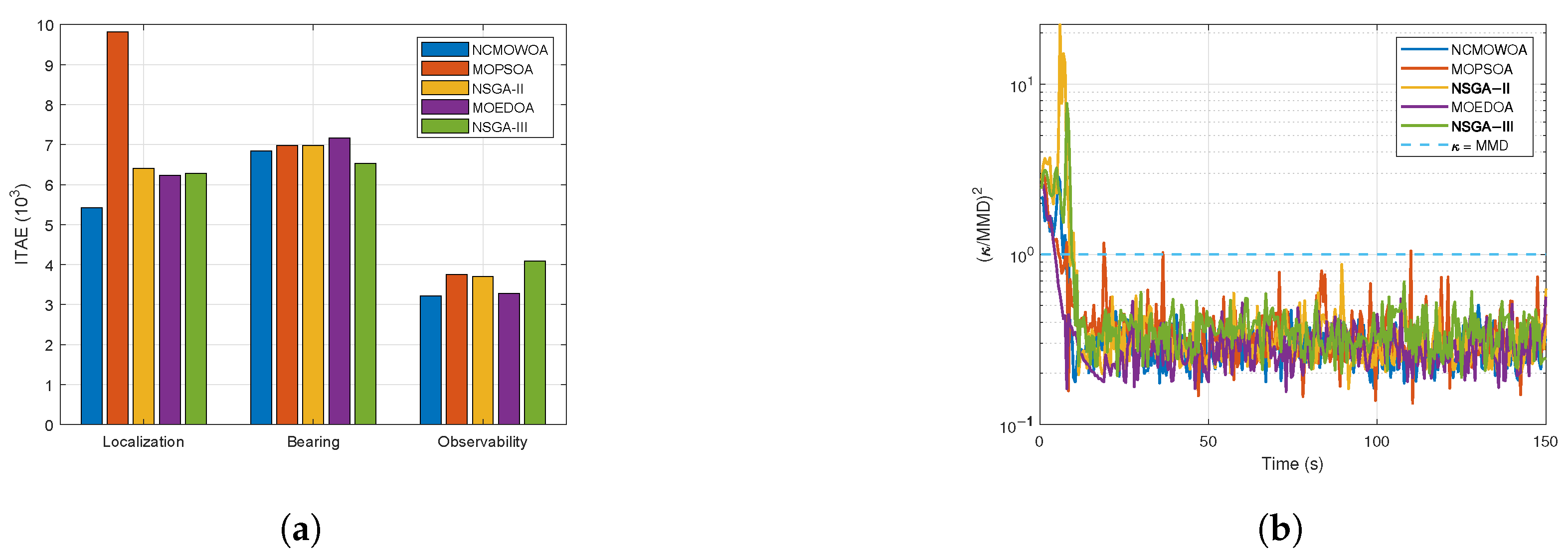
Section 4, the UAV trajectory optimization problem is formulated as a multi-objective nonlinear programming problem and subsequently resolved by the NCMOWOA. Finally, the numerical simulations and conclusions presented herein demonstrate that: (1) the proposed method exhibits superior convergence in both target localization and sensor bias estimation tasks, and (2) the NCMOWOA achieves optimal performance with minimal generational distance (GD) and inverted generational distance (IGD) values, confirming its outstanding convergence and diversity characteristics.
3. Bio-Inspired Distributional Observability Analysis
This section begins by analyzing the observability condition of a deterministic system. Subsequently, deterministic observability is extended to distributional observability, and the quantitative metric of distributional observability is established.
3.1. Observability Analysis for Deterministic System
Disregarding process noise, the discrete-time deterministic UAV kinematics and output are constructed as follows
where
is the UAV position at time step
k,
represents UAV kinematics,
indicates the output, which is the bearing angle of the UAV relative to the target at time step
k, and
denotes the output map.
The UAV performs the maneuver at time step
k under the control input. The maneuver
can be expressed as
where
is the sample time and
denotes the control input at time step
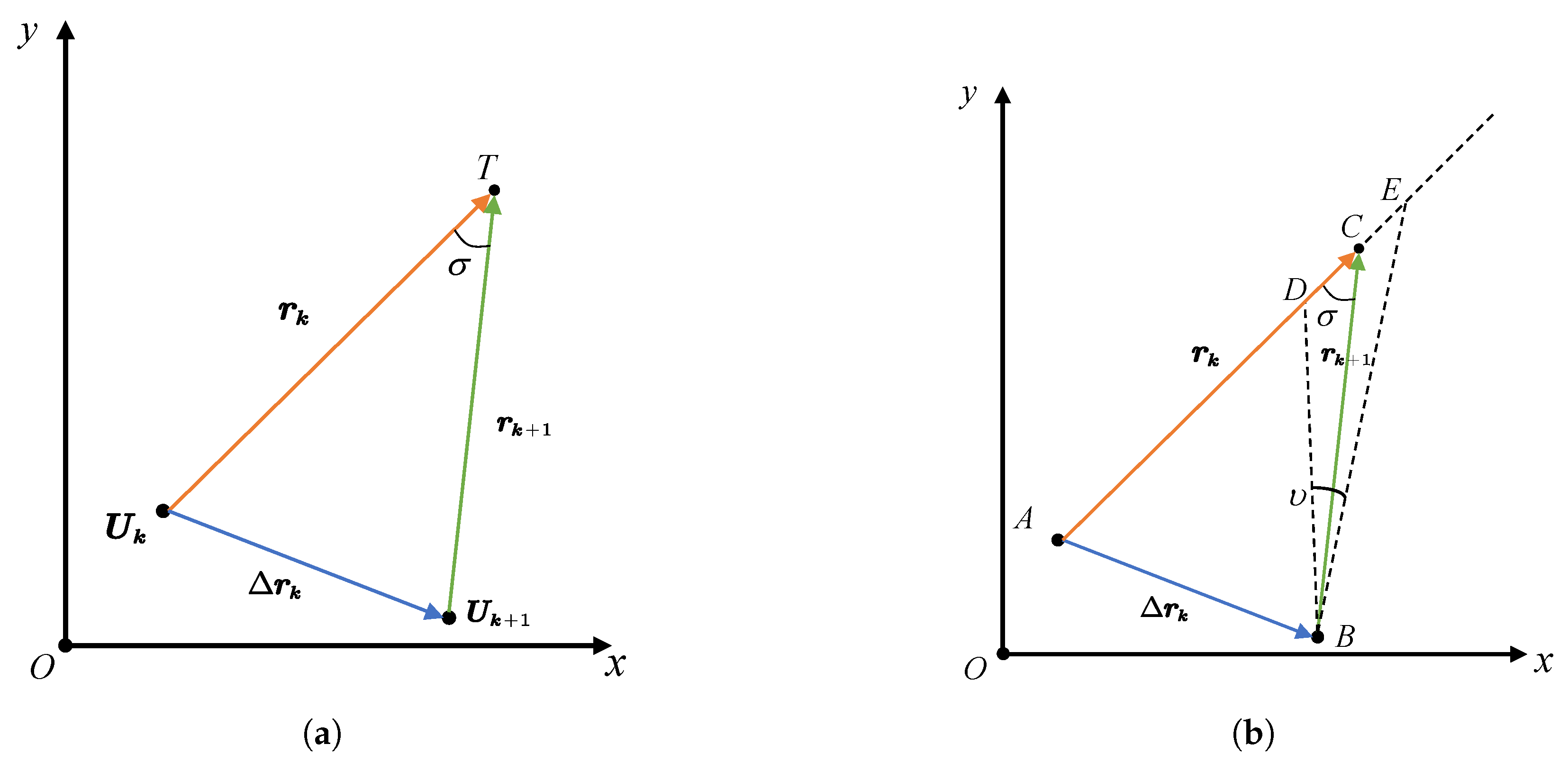
k. As shown in
Figure 2a, the UAV moves from position
to position
under the maneuver
, where
denotes the separation angle and
denotes the displacement vector.
When and given a fixed value of , the target position can be accurately determined by triangulating the relative position vector . When , the measurements at time steps k and are nearly identical. In this case, only when the UAV maneuvers between two consecutive time steps such that the separation angle can effective target localization be achieved.
Considering the influence of measurement noise, the geometric relationship between the UAV and the target is illustrated in
Figure 2b, and the target localization error is denoted as
. The trajectory optimization problem can be reformulated as an optimal control problem, where the goal is to find the optimal controller inputs at each time step to minimize the target localization error
. The objective function for optimization is expressed as follows
Remark 3. Analysis of the geometric relationship between the UAV and the target reveals that maximizing and minimizing are a pair of conflicting objectives. Owing to the relatively large distance between the UAV and the target, the change in between two consecutive time steps is not significant, and the value of remains approximately constant. Therefore, (15) can be simplified as Based on (
16), the observability condition for the system over two consecutive time steps is derived, requiring the UAV to perform a maneuver
such that the separation angle is greater than zero, that is
where
represents the Euclidean norm, retaining the same meaning throughout the context below.
To provide a clearer description of distributional observability, we sample the system
times at positions
and
, obtaining the output trajectories of the system at these two positions as
where
represents the result of the
t-th sampling at position
. Since process noise is not considered, the sampling results at the same position remain identical regardless of the number of samples, i.e., all the results are equal. Equation (
18) is equivalent to
Importantly, according to (
19), the deterministic observability condition can be obtained by output trajectories as follows
Definition 1. At time step k, the UAV transitions from to under the maneuver . We state that the target is observable, and is considered an effective maneuver if .
The effective maneuver is defined as a controlled motion that improves target observability. The distributional observability condition for a stochastic system will be presented later.
3.2. Bio-Inspired Distributional Observability Analysis for Stochastic System
In stochastic systems, observability follows a certain distribution. Distributional observability, as the expanded notion of observability, can be effectively computed in a data-driven manner. First, the discrete-time stochastic UAV kinematics and output are constructed as follows
where
represents the position of the UAV at time step
k and
is the distributional maneuver.
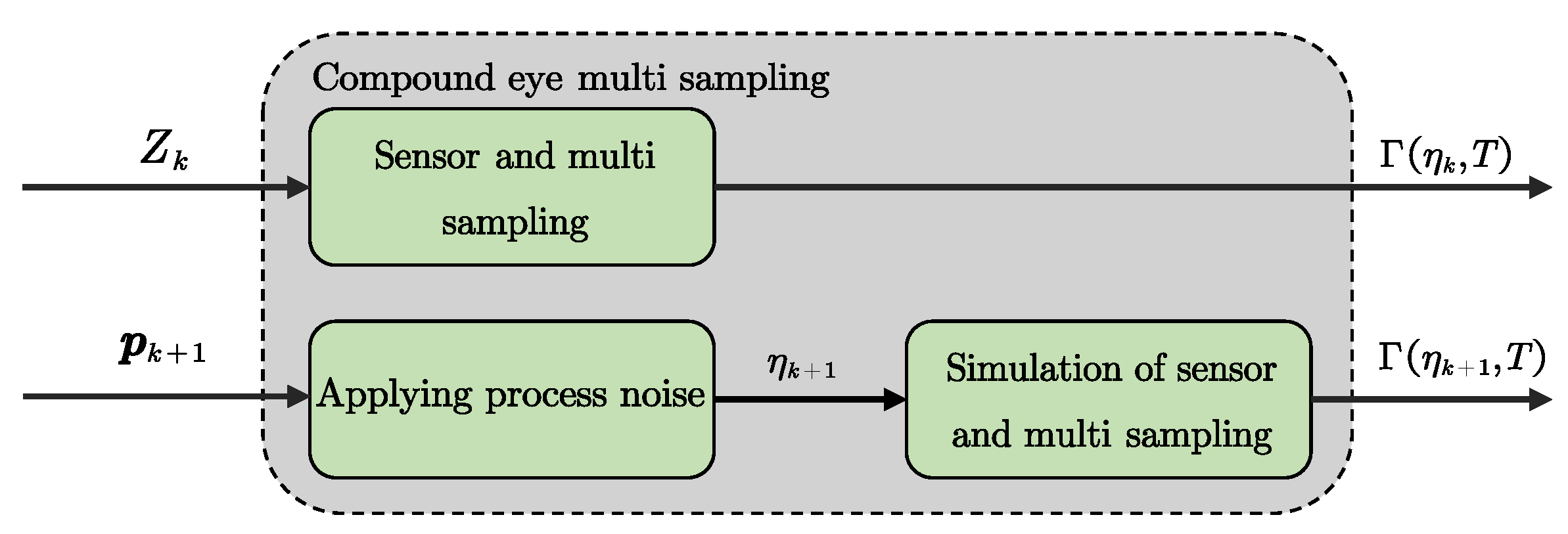
The UAV cannot execute deterministic maneuvers due to the process noise, which implies the existence of distributional positions
defined on
,
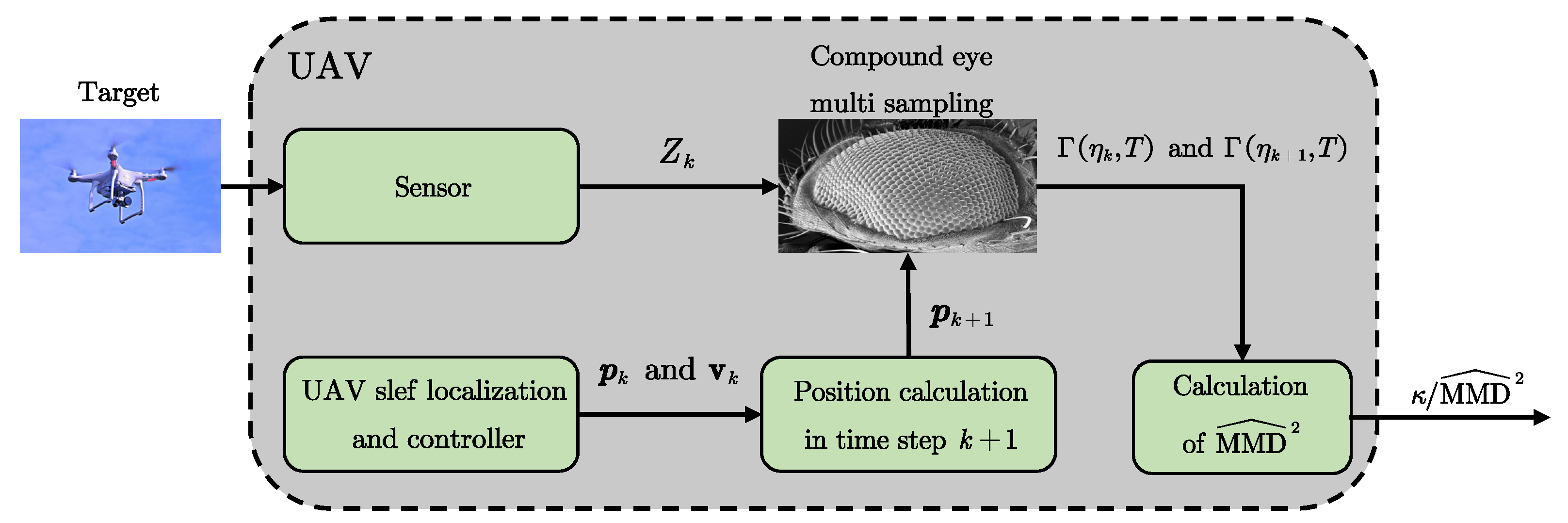
. Stochastic behaviors cannot be adequately characterized by individual measurements. Drawing inspiration from the compound eye vision in insects. A novel data acquisition approach inspired by the compound eye is proposed, which is illustrated in
Figure 3.
As shown in
Figure 3,
denotes the position derived from the control input
. We perform multiple samples at position
, with
denoting the result of the
t-th sampling at the distributional position
. Then, the output trajectories of the system at time steps
can be expressed as follows
The output trajectories and up to time are random variables, making it ineffective to compare their similarities. We define as the distribution law followed by the elements in . The distributional observability condition for a stochastic system can be obtained as follows
Definition 2. At time step k, the UAV transitions from to under the maneuver . We state that the target is distributionally observable, and is considered an effective maneuver if .
Once the UAV maneuver is determined, the distributional observability depends solely on and . Distributional observability can be viewed as a generalized extension of deterministic observability. When all noise is ignored, the position of the UAV can be precisely determined, implying that and follow the Dirac distribution. In this case, Definition 2 reduces to deterministic observability, as described in Definition 1. Our focus is to determine whether these positions retain distributional observability when process noise and measurement noise are introduced. The relevant notation for the measure space is defined. The Borel -algebra is , which is defined in an open set , and indicates probability measures on . The probability is expressed as .
According to (
4), UAV measurements are corrupted by
b and
. These can be treated as a specialized form of additive noise, denoted as
, which follows a Gaussian distribution with mean
b. The UAV measurement model can thus be expressed as
To represent the influence of
, the function
,
is defined.
denotes the output before it is corrupted by
, and
states the output trajectory before it is corrupted by
and
. As demonstrated in [
43], additive noise does not affect the equivalence of the two distributions. In other words, for any
with
, there exists a measurable set
such that
It indicates that the two different distributions, and , where represents the output trajectory before it is corrupted by measurement noise, remain distinguishable even after being corrupted by . In subsequent sections, we quantitatively analyze distributional observability via a data-driven approach.
3.3. MMD and Quantitative Analysis
In this section, distributional observability is quantified through the MMD algorithm. First, a nonnegative function
is defined as a kernel function, which generates the underlying Hilbert space
defined over
. It is known as the reproducing kernel Hilbert space (RKHS). We assume that at time step
k, the elements
in
follow the distribution
, which is mapped to the RKHS via the kernel mean embedding
k as
. Similarly,
is mapped to
. The MMD aims to compute the distance between
and
in the RKHS, which is expressed as follows
where
is the norm in the RKHS space. The Gaussian kernel is used as the kernel function as follows
where
is the scalar width of the Gaussian kernel. Assuming that
T tends to infinity, if
,
and
are identically distributed, then
and
exhibit distributional unobservability.
Owing to finite sample constraints (
), the value of the MMD is computationally approximated through discrete sampling, with the approximated
given by
where
and
are abbreviated as
and
, respectively. Let the upper bound of the kernel function
k be
with the concentration bound
. Inspired by [
54], (
26) converges in probability to
By applying the concentration bounds in (
27), an acceptable error rate
c is defined, and the lower bound value
for MMD is established as follows
According to (
28), the definition of distributional observability under finite sampling can be derived as follows
Definition 3. At time step k, the UAV transitions from to under the control of the maneuver . We state that the target is distributionally observable, and is considered to be an effective maneuver if .
As shown in Definition 3, the ratio
is considered to be a quantitative metric of distributional observability. The flowchart of the bio-inspired distributional observability analysis method is shown in
Figure 4.
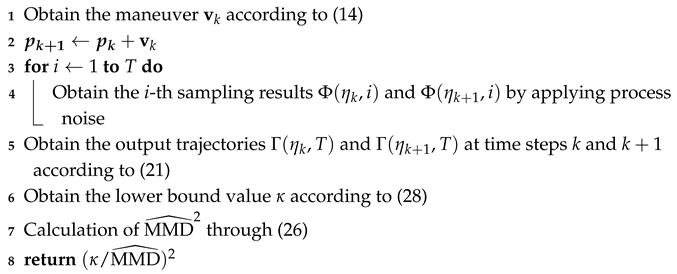
Based on the preceding analysis, the performance metric for observability enhancement can be formally derived as
When
, the system exhibits the strongest degree of observability. When
, the system exhibits the weakest degree of observability, which is regarded as the distributional unobservability line. The algorithmic pseudocode is presented in Algorithm 1.
| Algorithm 1: Distributional Observability Quantifying Algorithm |
![Biomimetics 10 00336 i001]() |







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}