
Virtual-Integrated Admittance Control Method of Continuum Robot for Capturing Non-Cooperative Space Targets

Abstract
1. Introduction
2. Modeling
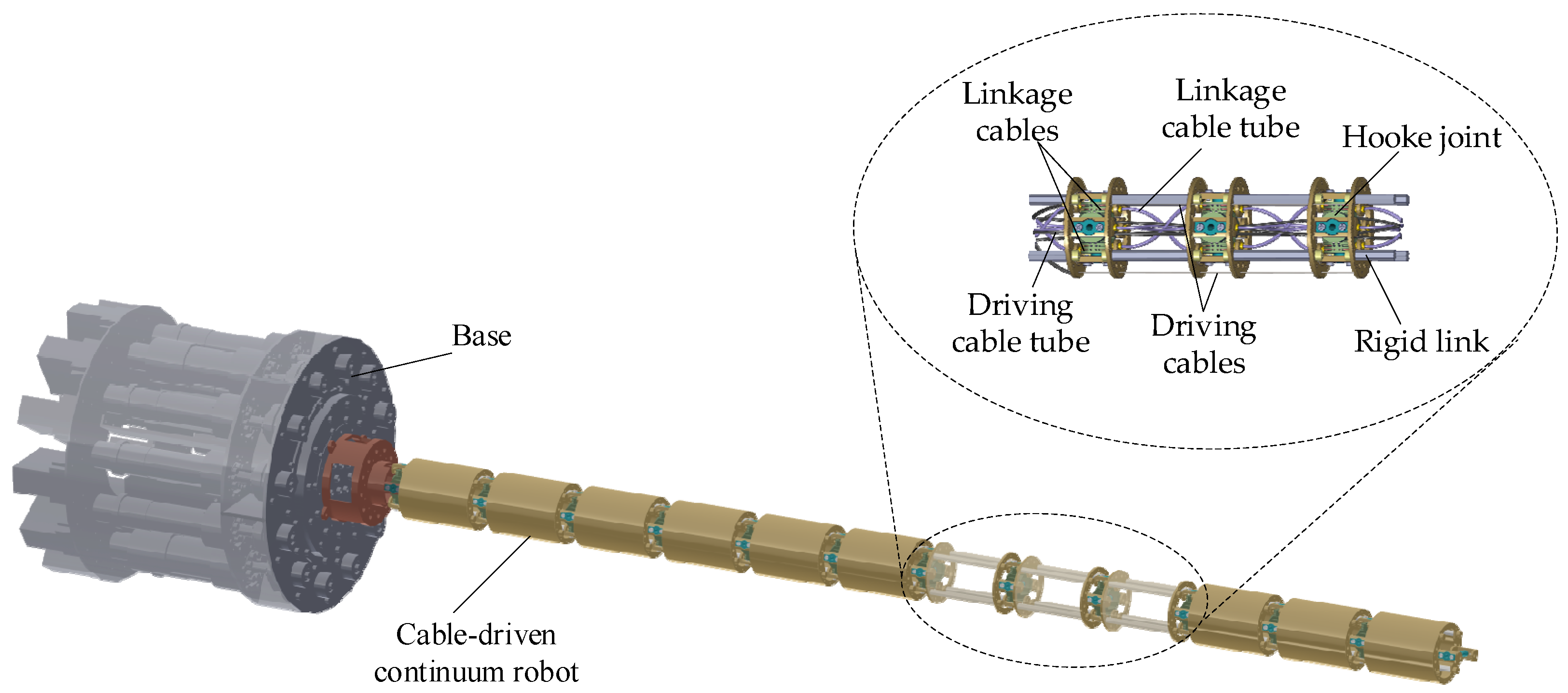
2.1. Mechanism Design
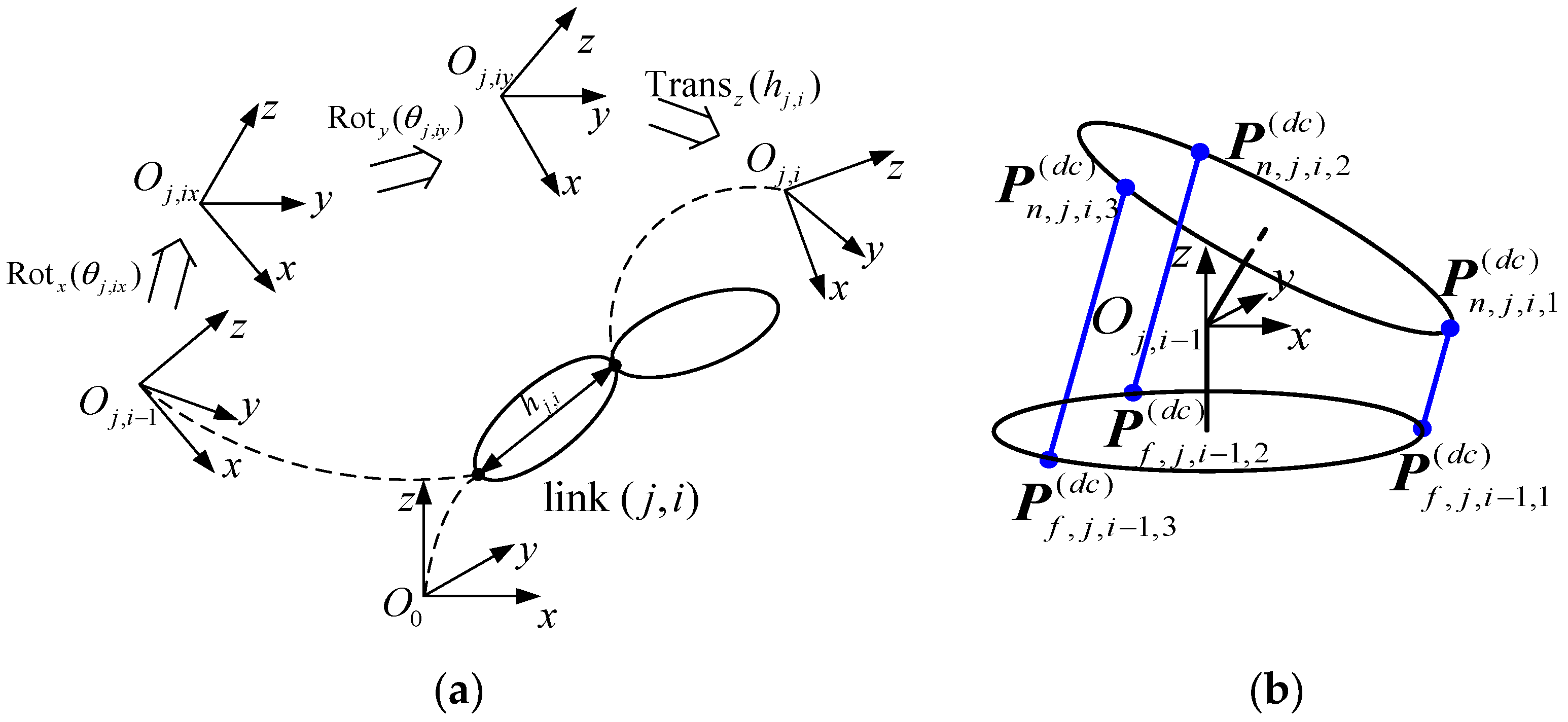
2.2. Kinematic Modeling
2.2.1. Joint-Task Space
2.2.2. Joint-Driving Space
2.3. Differential Kinematics
2.3.1. Joint-Task Space
2.3.2. Joint-Driving Space
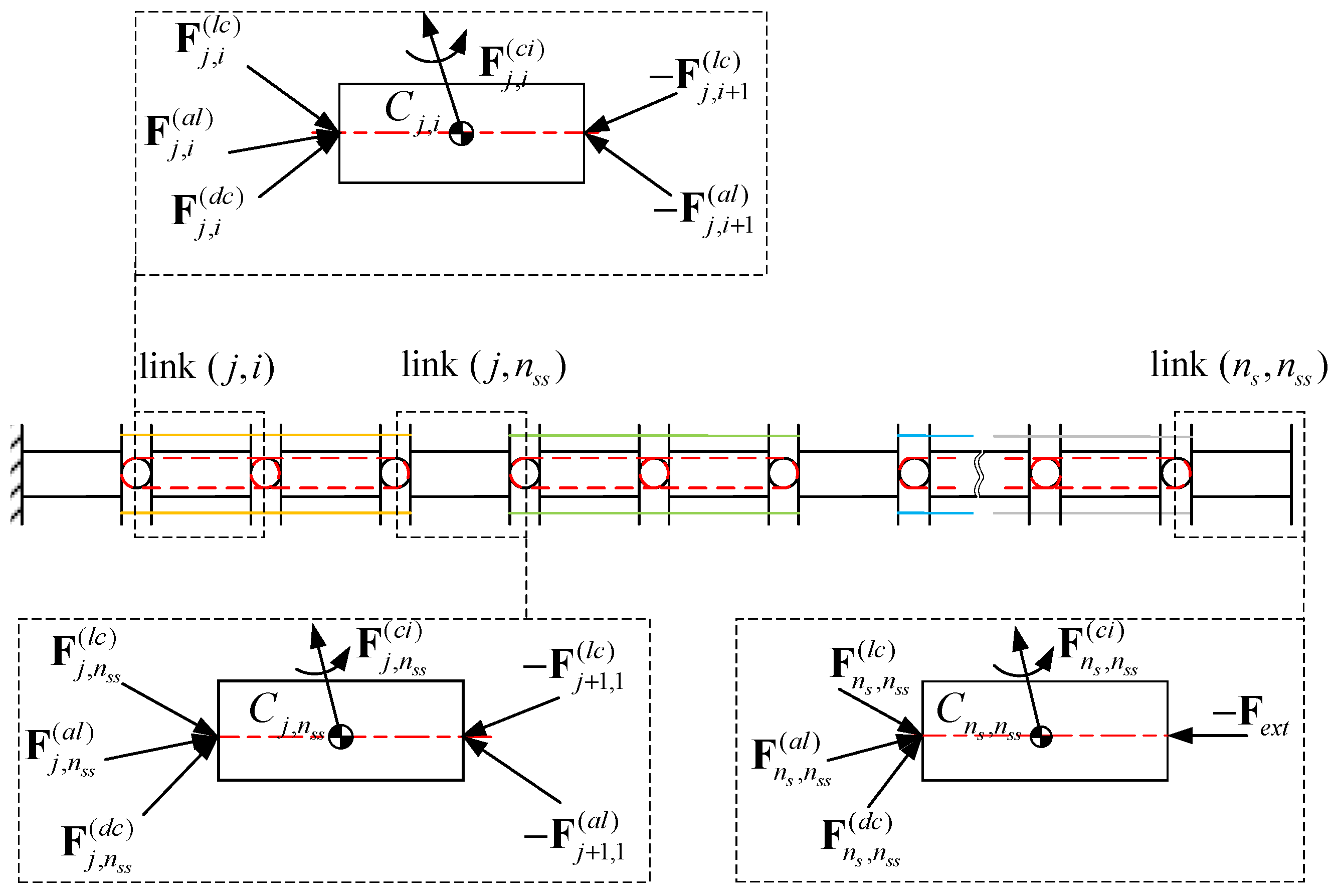
2.4. Dynamic Modeling
- (1)
- The friction between the driving cable tubes and driving cables, as well as between the linkage cable tubes and linkage cables, is negligible;
- (2)
- The resistance of the driving cable tubes to backbone bending is negligible;
- (3)
- The fit between the driving cables and the cable holes is seamless, and the linkage cables do not slip;
- (4)
- The cables are considered non-deformable.
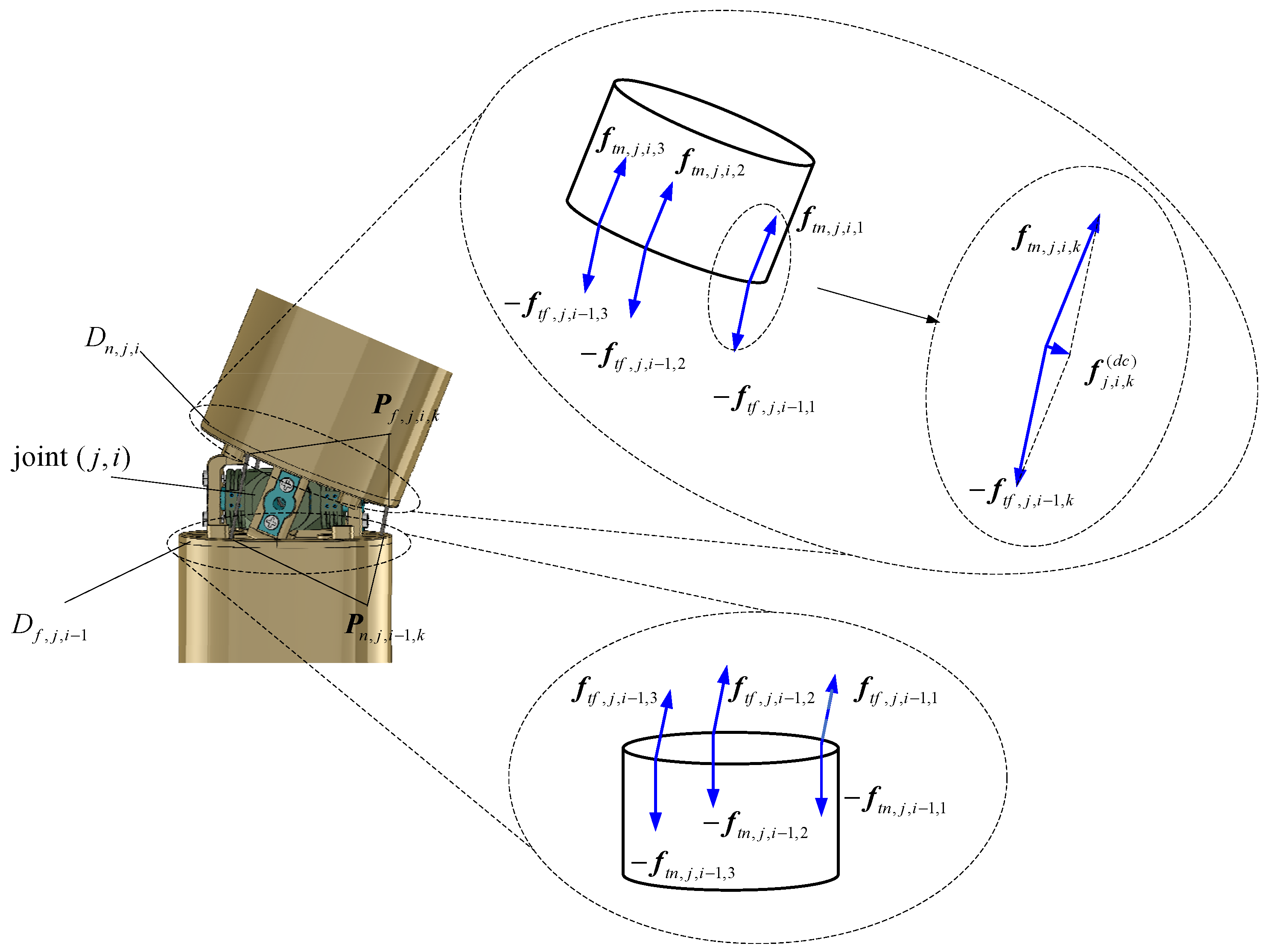
2.4.1. Driving Cable Force
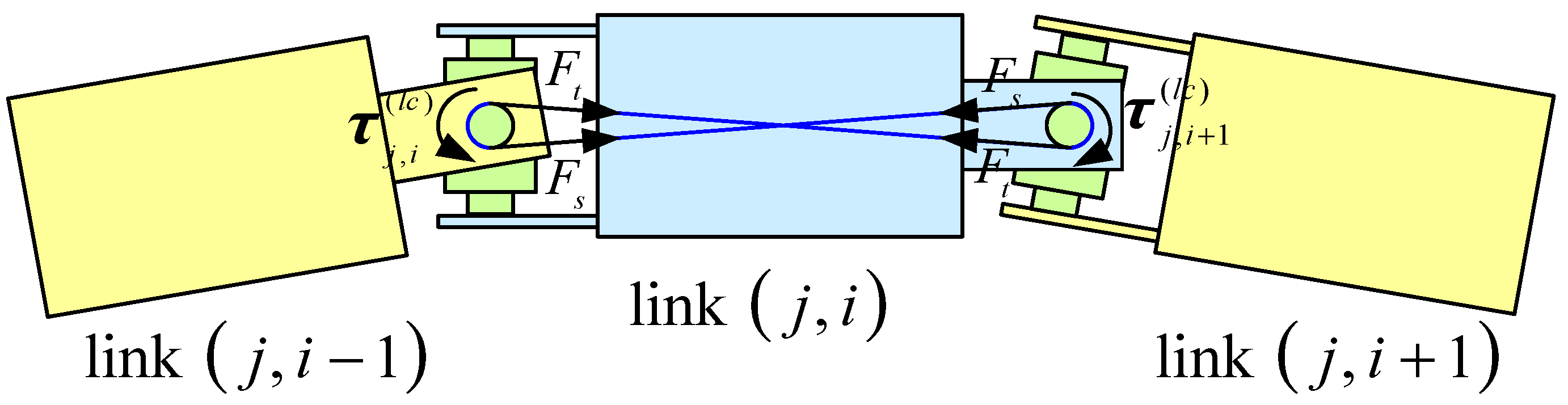
2.4.2. Linkage Cable Force
2.4.3. Inertial Force
2.4.4. Recursive Dynamics
2.5. Target Contact Dynamics
3. Compliant Grasping Method
3.1. Process of Grasping
3.2. Virtual Force
3.2.1. Virtual Repulsive Force
3.2.2. Virtual Guiding Force
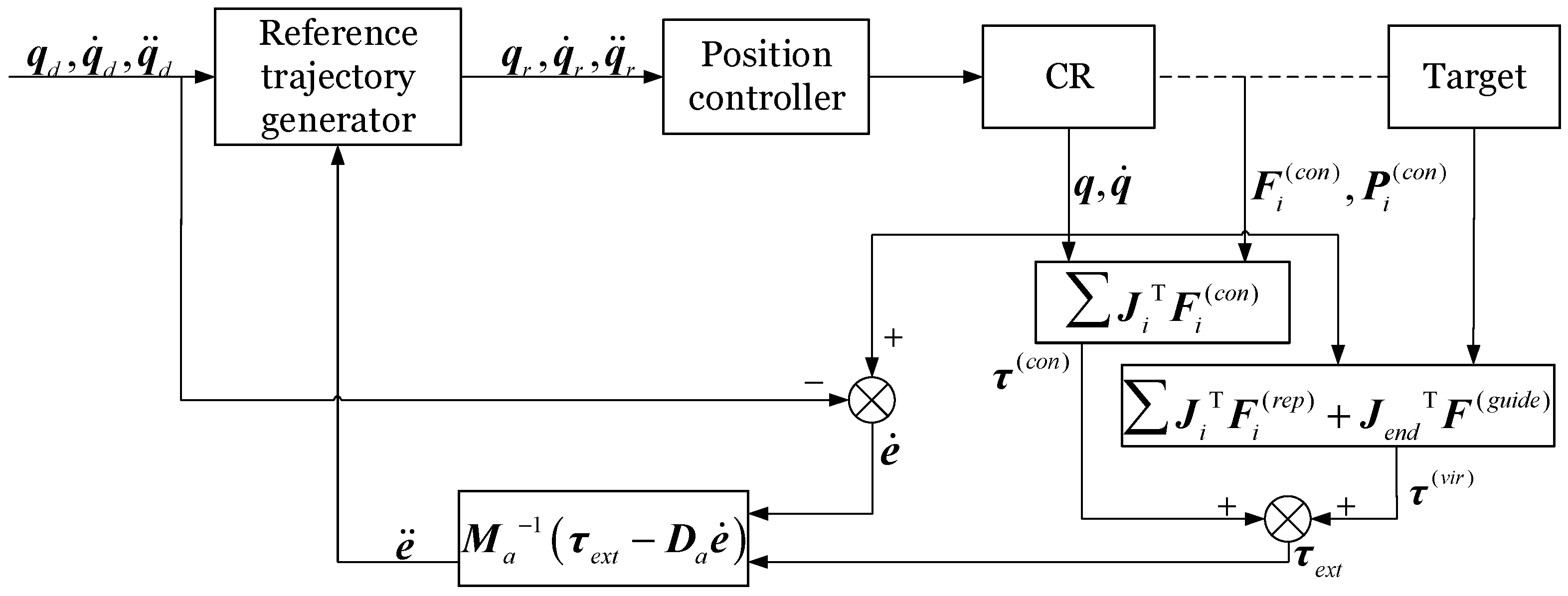
3.3. Admittance Controller
3.4. Position Control
4. Simulation and Discussion
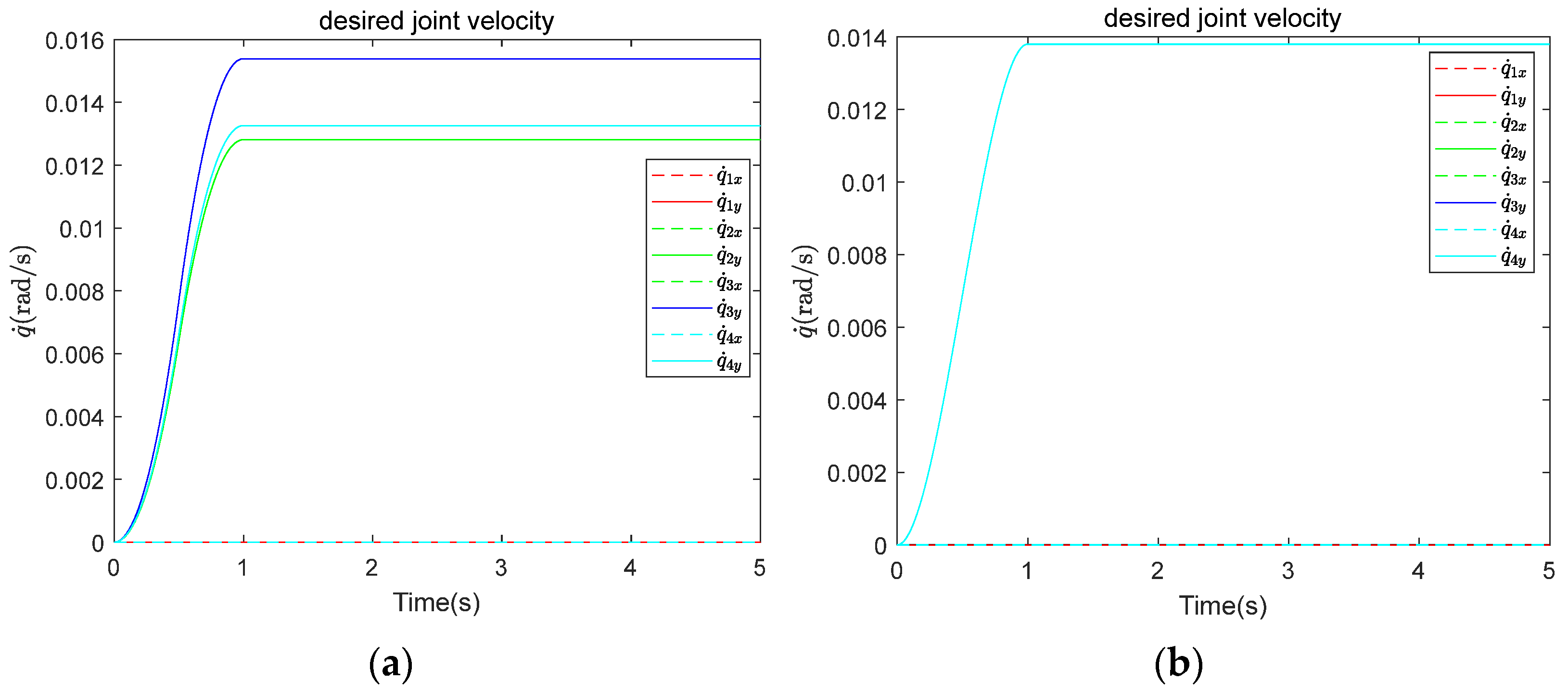
4.1. Simulation Settings
4.2. Simulation Experiment 1
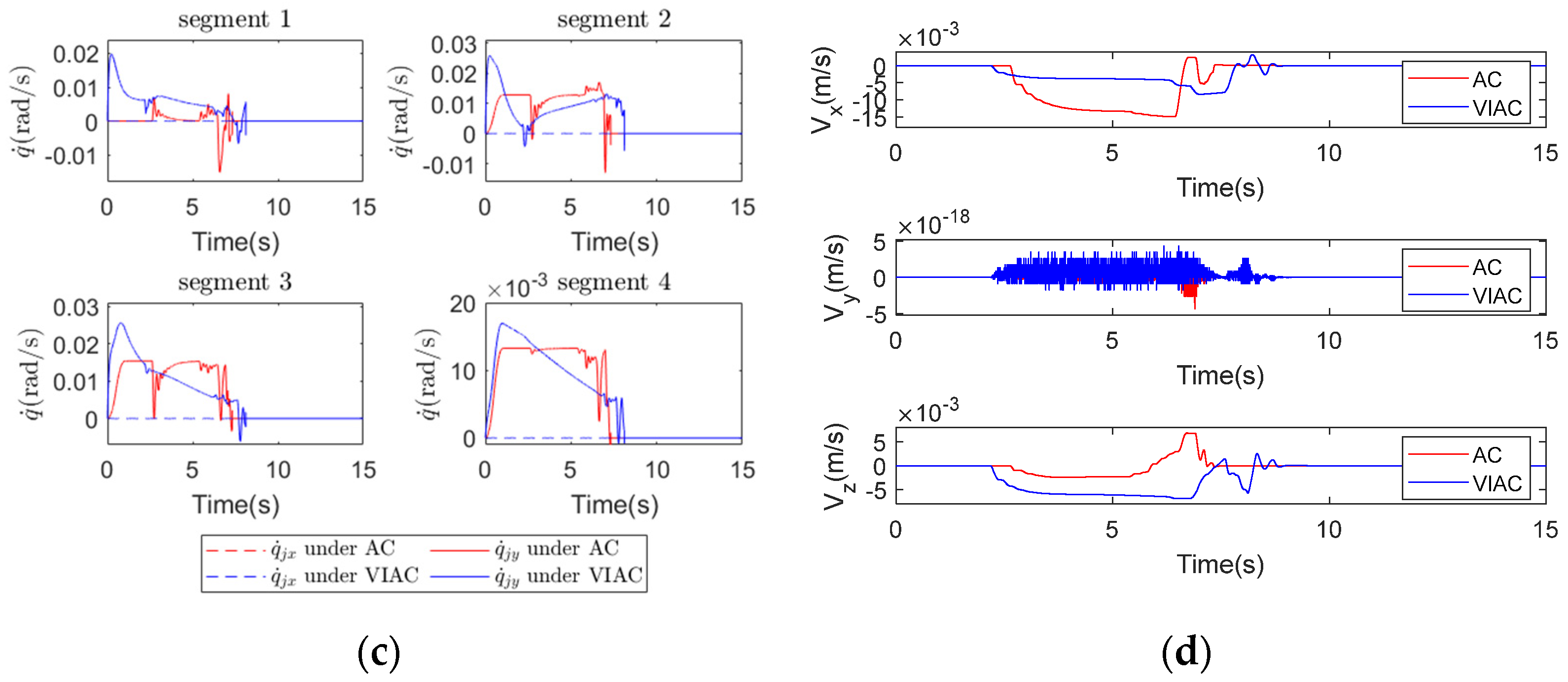
4.2.1. Comparison and Analysis of Kinematic Simulation Results
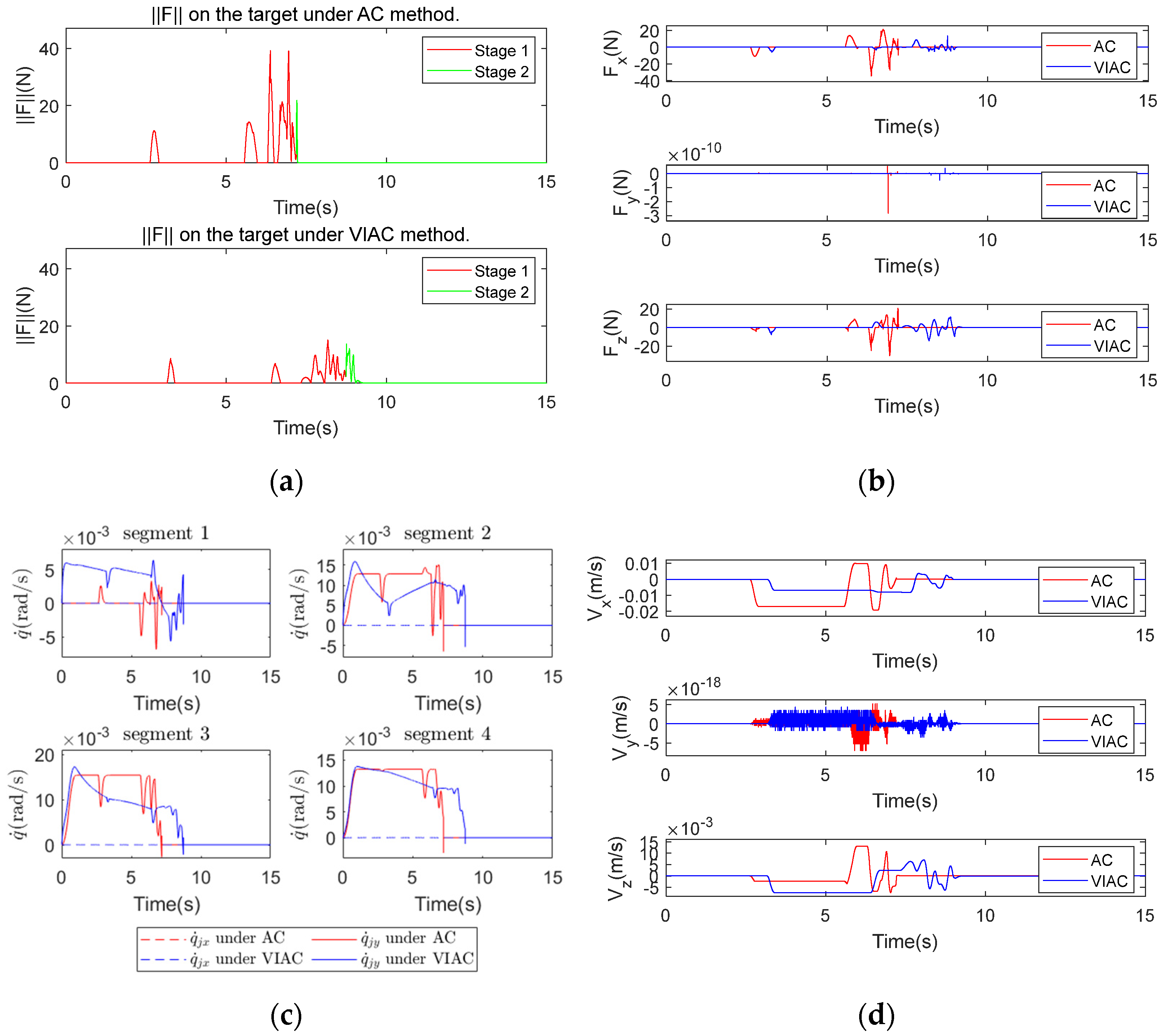
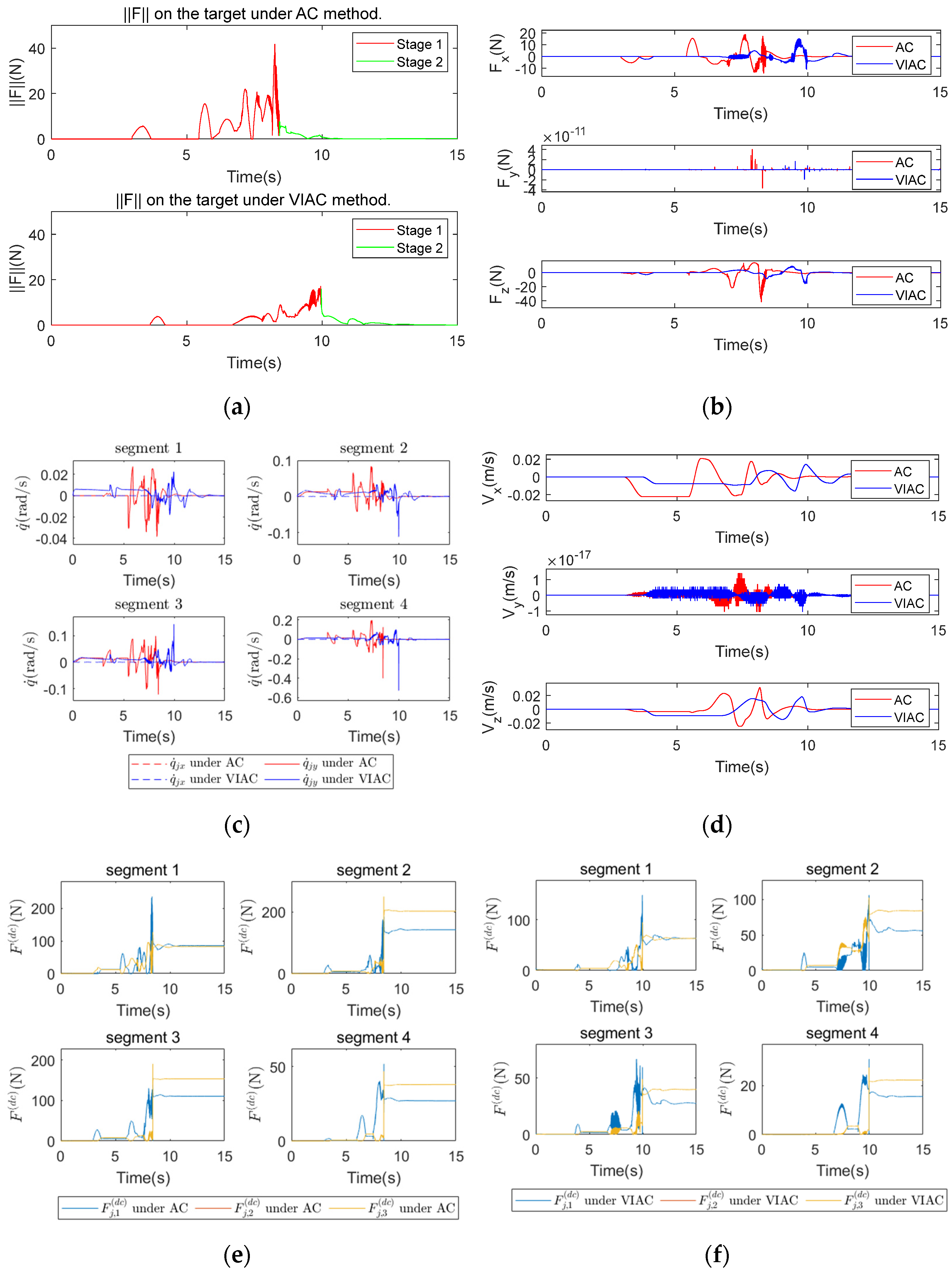
4.2.2. Comparison and Analysis of Dynamic Simulation Results
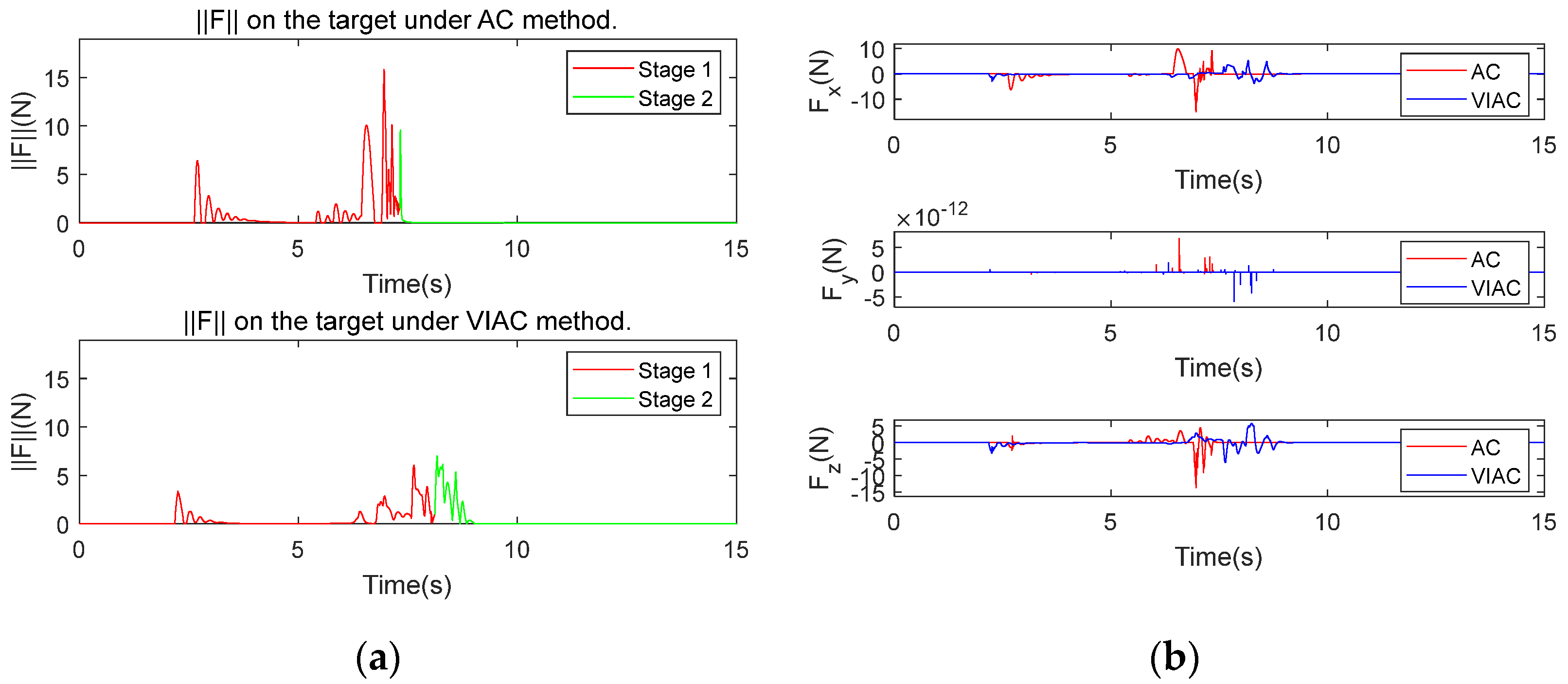
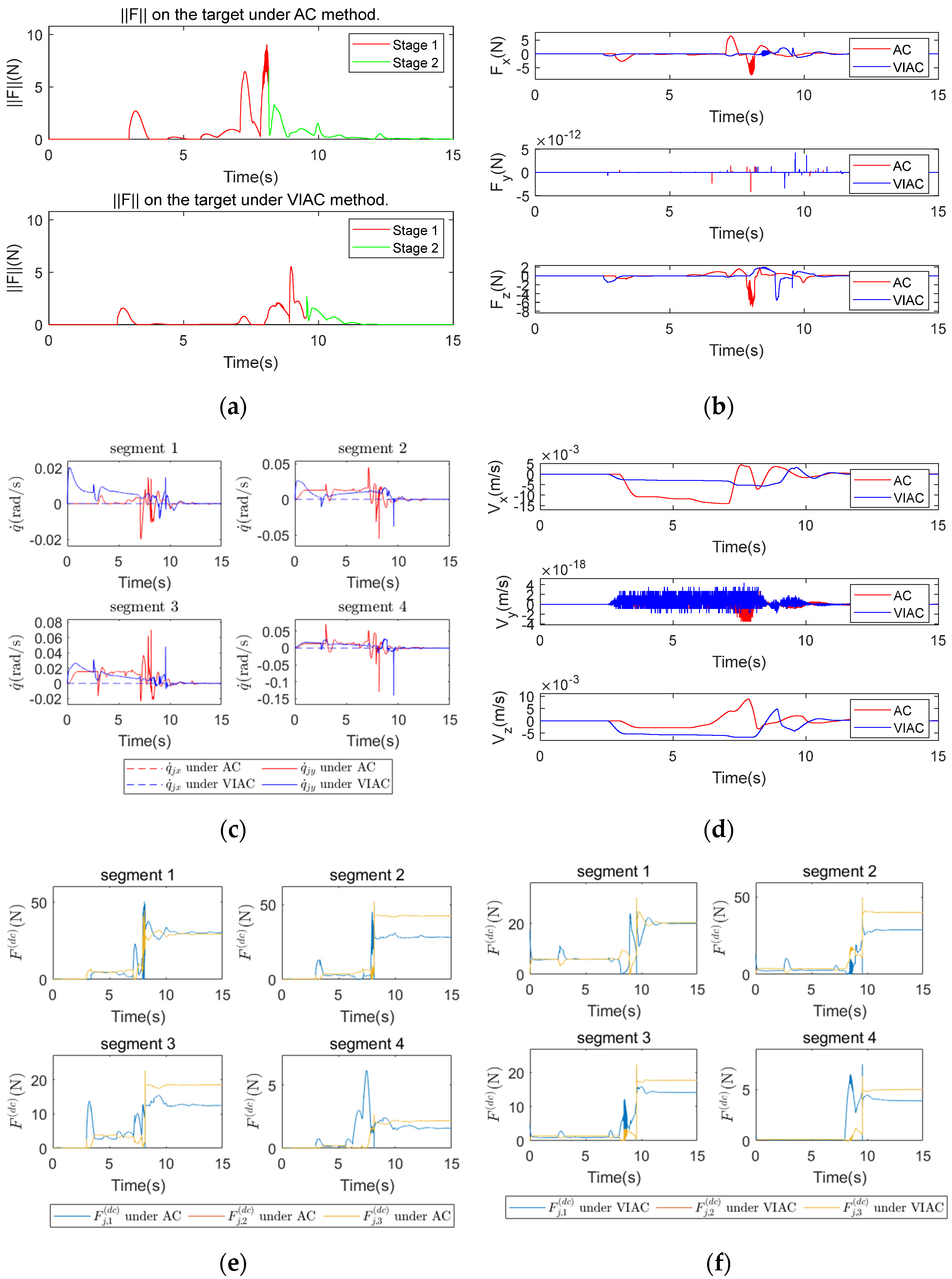
4.3. Simulation Experiment 2
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, D.; Huang, P.; Cai, J.; Meng, Z.; Svotina, V.V.; Cherkasova, M.V.; Carambia, A.; Frazelle, C.G.; Kapadia, A.D.; Walker, I.D. Space Debris Removal—Review of Technologies and Techniques. Flexible or Virtual Connection between Space Debris and Service Spacecraft. Acta Astronaut. 2023, 204, 840–853. [Google Scholar] [CrossRef]
- Zhang, W.; Li, F.; Li, J.; Cheng, Q. Review of On-Orbit Robotic Arm Active Debris Capture Removal Methods. Aerospace 2023, 10, 13. [Google Scholar] [CrossRef]
- Yang, S.; Quan, L.; Yu, L.; Lei, W. A Trajectory Planning Method for Capture Operation of Space Robotic Arm Based on Deep Reinforcement Learning. J. Comput. Inf. Sci. Eng. 2024, 24, 091003. [Google Scholar] [CrossRef]
- Tomasz, R.; Karol, S. Application of Impedance Control of the Free Floating Space Manipulator for Removal of Space Debris. PAR 2023, 27, 95–106. [Google Scholar] [CrossRef]
- Akiyoshi, U.; Kentaro, U.; Kazuya, Y. Space Debris Reliable Capturing by a Dual-Arm Orbital Robot: Detumbling and Caging. In Proceedings of the 2024 International Conference on Space Robotics (iSpaRo), Luxembourg, 24 June 2024; pp. 194–201. [Google Scholar]
- Yuan, H.; Huang, Y.; Zheng, H.; Xia, X. Motion Analysis of Robotic Arm Capture Mechanism for Space Tumbling Target Capture. In Proceedings of the 2024 43rd Chinese Control Conference (CCC), Kunming, China, 28 July 2024; pp. 4729–4735. [Google Scholar]
- Zhu, W.; Pang, Z.; Du, Z.; Gao, G.; Zhu, Z.H. Multi-Debris Capture by Tethered Space Net Robot via Redeployment and Assembly. J. Guid. Control. Dyn. 2024, 47, 1359–1376. [Google Scholar] [CrossRef]
- Michal, C.-G.; Eberhard, G. Generation of Secondary Space Debris Risks from Net Capturing in Active Space Debris Removal Missions. Aerospace 2024, 11, 236. [Google Scholar] [CrossRef]
- Huang, W.; Zou, H.; Pan, Y.; Zhang, K.; Zheng, J.; Li, J.; Mao, S. Numerical Simulation and Behavior Prediction of a Space Net System throughout the Capture Process: Spread, Contact, and Close. Int. J. Mech. Syst. Dyn. 2023, 3, 265–273. [Google Scholar] [CrossRef]
- Boonrath, A.; Liu, F.; Botta, E.M.; Chowdhury, S. Learning-Aided Control of Robotic Tether-Net with Maneuverable Nodes to Capture Large Space Debris. In Proceedings of the 2024 IEEE International Conference on Robotics and Automation (ICRA), Yokohama, Japan, 13 May 2024; pp. 11737–11743. [Google Scholar]
- Zhao, W.; Pang, Z.; Wang, M.; Li, P.; Du, Z. Experimental and Numerical Investigations of Damage and Ballistic Limit Velocity of CFRP Laminates Subject to Harpoon Impact. Thin-Walled Struct. 2024, 198, 111732. [Google Scholar] [CrossRef]
- Mao, L.; Zhao, W.; Pang, Z.; Gao, J.; Du, Z. Study on the Penetration Characteristics of Conical Harpoon on Rotating Space Debris. Adv. Space Res. 2024, 74, 4109–4122. [Google Scholar] [CrossRef]
- Zhao, W.; Pang, Z.; Zhao, Z.; Du, Z.; Zhu, W. A Simulation and an Experimental Study of Space Harpoon Low-Velocity Impact, Anchored Debris. Materials 2022, 15, 5041. [Google Scholar] [CrossRef]
- Wu, C.; Yue, S.; Shi, W.; Li, M.; Du, Z.; Liu, Z. Dynamic Simulation and Parameter Analysis of Harpoon Capturing Space Debris. Materials 2022, 15, 8859. [Google Scholar] [CrossRef] [PubMed]
- Nohmi, M.; Matsuo, K.; Kawamoto, S.; Ohkawa, Y. EDT Demonstration for Keeping Low Altitude Orbit Using Carbon Nanotube Tether. Acta Astronaut. 2024, 225, 881–890. [Google Scholar] [CrossRef]
- Zabolotnov, Y.M.; Wang, C.; Zheng, M. Method of Rapprochement of a Tether System with an Uncontrolled Space Object. J. Comput. Syst. Sci. Int. 2024, 63, 871–884. [Google Scholar] [CrossRef]
- Jang, W.; Yoon, Y.; Go, M.; Chung, J. Dynamic Behavior and Libration Control of an Electrodynamic Tether System for Space Debris Capture. Appl. Sci. 2025, 15, 1844. [Google Scholar] [CrossRef]
- Yang, C.; Walker, I.D.; Branson, D.T.; Dai, J.S.; Sun, T.; Kang, R. A Multitentacle Gripper for Dynamic Capture. IEEE Trans. Robot. 2024, 40, 4284–4300. [Google Scholar] [CrossRef]
- Zhang, Y.; Quan, J.; Li, P.; Song, W.; Zhang, G.; Li, L.; Zhou, D. A Flytrap-Inspired Bistable Origami-Based Gripper for Rapid Active Debris Removal. Adv. Intell. Syst. 2023, 5, 2200468. [Google Scholar] [CrossRef]
- Hubert Delisle, M.; Christidi-Loumpasefski, O.-O.; Yalçın, B.C.; Li, X.; Olivares-Mendez, M.; Martinez, C. Hybrid-Compliant System for Soft Capture of Uncooperative Space Debris. Appl. Sci. 2023, 13, 7968. [Google Scholar] [CrossRef]
- Chu, M.; Lin, S.; Xu, S.; Wang, G.; Jia, J.; Chang, R. An Omnidirectional Compliant Docking Strategy for Non-Cooperative On-Orbit Targets: Principle, Design, Modeling, and Experiment. IEEE Trans. Aerosp. Electron. Syst. 2024, 60, 8364–8379. [Google Scholar] [CrossRef]
- Khomich, V.Y.; Shakhmatov, E.V.; Sviridov, K.N. Laser-Optical Technologies for Space Debris Removal. Acta Astronaut. 2025, 226, 78–85. [Google Scholar] [CrossRef]
- Scharring, S.; Kästel, J. Can the Orbital Debris Disease Be Cured Using Lasers? Aerospace 2023, 10, 633. [Google Scholar] [CrossRef]
- Huang, L.; Qu, Y.; Wang, J. Space Debris Removal Ground-Based Laser Nudge De-Orbiting System and Modeling Process. In Proceedings of the 2022 IEEE 10th Joint International Information Technology and Artificial Intelligence Conference (ITAIC), Chongqing, China, 17 June 2022; Volume 10, pp. 478–483. [Google Scholar]
- Yang, W.; Chen, C.; Yu, Q.; Li, M.; Gong, Z. Research and development of simulation platform for orbital debris removal with space based laser system. Chin. Space Sci. Technol. 2019, 39, 59–66. [Google Scholar]
- Ledkov, A.S. Determining the Effective Space Debris Attitude Motion Modes for Ion-Beam-Assisted Transportation. J. Spacecr. Rocket. 2024, 61, 104–113. [Google Scholar] [CrossRef]
- Melnikov, A.V.; Abgaryan, V.K.; Mogulkin, A.I.; Peysakhovich, O.D.; Svotina, V.V. Experimental Study of Ion Beam Interaction with Target Surface Aimed at Developing a Contactless Method for Space Debris Removal by an Ion Beam. Acta Astronaut. 2024, 216, 120–128. [Google Scholar] [CrossRef]
- Aslanov, V.S.; Ledkov, A.S. Dynamics and Control of Space Debris during Its Contactless Ion Beam Assisted Removal. J. Phys. Conf. Ser. 2020, 1705, 012006. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, X.; Wang, X.; Zhou, X.; An, J.; Li, Y. TDE-Based Adaptive Integral Sliding Mode Control of Space Manipulator for Space-Debris Active Removal. Aerospace 2022, 9, 105. [Google Scholar] [CrossRef]
- Russo, M.; Sadati, S.M.H.; Dong, X.; Mohammad, A.; Walker, I.D.; Bergeles, C.; Xu, K.; Axinte, D.A. Continuum Robots: An Overview. Adv. Intell. Syst. 2023, 5, 2200367. [Google Scholar] [CrossRef]
- Peng, J.; Wu, H.; Zhang, C.; Chen, Q.; Meng, D.; Wang, X. Modeling, Cooperative Planning and Compliant Control of Multi-Arm Space Continuous Robot for Target Manipulation. Appl. Math. Model. 2023, 121, 690–713. [Google Scholar] [CrossRef]
- Li, X.; Tian, J.; Wei, C.; Cao, X. Force-Position Collaborative Optimization of Rope-Driven Snake Manipulator for Capturing Non-Cooperative Space Targets. Chin. J. Aeronaut. 2024, 37, 369–384. [Google Scholar] [CrossRef]
- Jiang, D.; Cai, Z.; Peng, H.; Wu, Z. Coordinated Control Based on Reinforcement Learning for Dual-Arm Continuum Manipulators in Space Capture Missions. J. Aerosp. Eng. 2021, 34, 04021087. [Google Scholar] [CrossRef]
- Li, J.; Xiao, J. Determining “Grasping” Configurations for a Spatial Continuum Manipulator. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 4207–4214. [Google Scholar]
- Li, J.; Teng, Z.; Xiao, J.; Kapadia, A.; Bartow, A.; Walker, I. Autonomous Continuum Grasping. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 4569–4576. [Google Scholar]
- Mao, H.; Teng, Z.; Xiao, J. Progressive Object Modeling with a Continuum Manipulator in Unknown Environments. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 5674–5681. [Google Scholar]
- Wilde, M.; Walker, I.; Choon, S.K.; Near, J. Using Tentacle Robots for Capturing Non-Cooperative Space Debris—A Proof of Concept. In Proceedings of the AIAA SPACE and Astronautics Forum and Exposition, Orlando, FL, USA, 12 September 2017; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2017. [Google Scholar]
- Liu, Y.; Ge, Z.; Yang, S.; Walker, I.D.; Ju, Z. Elephant’s Trunk Robot: An Extremely Versatile Under-Actuated Continuum Robot Driven by a Single Motor. J. Mech. Robot. 2019, 11, 051008. [Google Scholar] [CrossRef]
- Li, X.; Chen, Z.; Wang, Y. Detumbling a Space Target Using Soft Robotic Manipulators. In Proceedings of the 2022 IEEE International Conference on Mechatronics and Automation (ICMA), Guilin, China, 7 August 2022; pp. 1807–1812. [Google Scholar]
- Agabiti, C.; Ménager, E.; Falotico, E. Whole-Arm Grasping Strategy for Soft Arms to Capture Space Debris. In Proceedings of the 2023 IEEE International Conference on Soft Robotics (RoboSoft), Singapore, 3 April 2023; pp. 1–6. [Google Scholar]
- Feng, X.; Wu, Z.; Wang, Z.; Luo, J.; Xu, X.; Qiu, Z. Design and Experiments of a Bio-Inspired Tensegrity Spine Robot for Active Space Debris Capturing. J. Phys. Conf. Ser. 2021, 1885, 052024. [Google Scholar] [CrossRef]
- Matsuda, R.; Mavinkurve, U.; Kanada, A.; Honda, K.; Nakashima, Y.; Yamamoto, M. A Woodpecker’s Tongue-Inspired, Bendable and Extendable Robot Manipulator With Structural Stiffness. IEEE Robot. Autom. Lett. 2022, 7, 3334–3341. [Google Scholar] [CrossRef]
- Jiang, X.; Li, S.; Ma, C.; Kuang, X.; Zhang, W.; Zhao, H. Design and Analysis of Bionic Continuum Robot with Helical Winding Grasping Function. J. Mech. Robot. 2024, 16, 071013. [Google Scholar] [CrossRef]
- Wang, R.; Huang, H.; Li, X. Self-Adaptive Grasping Analysis of a Simulated “Soft” Mechanical Grasper Capable of Self-Locking. J. Mech. Robot. 2023, 15, 061006. [Google Scholar] [CrossRef]
- Taylor, I.H.; Bawa, M.; Rodriguez, A. A Tactile-Enabled Hybrid Rigid-Soft Continuum Manipulator for Forceful Enveloping Grasps via Scale Invariant Design. In Proceedings of the 2023 IEEE International Conference on Robotics and Automation (ICRA), London, UK, 29 May 2023; pp. 10331–10337. [Google Scholar]
- Li, W.; Huang, X.; Yan, L.; Cheng, H.; Liang, B.; Xu, W. Force Sensing and Compliance Control for a Cable-Driven Redundant Manipulator. IEEE/ASME Trans. Mechatron. 2024, 29, 777–788. [Google Scholar] [CrossRef]
- Xia, R.; Li, J.; Hao, R.; Wang, J.; Wang, C. Adaptive Impedance Control of Continuum Robots. In Proceedings of the 2024 43rd Chinese Control Conference (CCC), Kunming, China, 28 July 2024; pp. 4302–4307. [Google Scholar]
- Su, T.; Niu, L.; He, G.; Liang, X.; Zhao, L.; Zhao, Q. Coordinated Variable Impedance Control for Multi-Segment Cable-Driven Continuum Manipulators. Mech. Mach. Theory 2020, 153, 103969. [Google Scholar] [CrossRef]
- Ding, S.; Peng, J.; Xin, J.; Zhang, H.; Wang, Y. Vision-Based Virtual Impedance Control for Robotic System Without Prespecified Task Trajectory. IEEE Trans. Ind. Electron. 2023, 70, 6046–6056. [Google Scholar] [CrossRef]
- Arita, H.; Nakamura, H.; Fujiki, T.; Tahara, K. Smoothly Connected Preemptive Impact Reduction and Contact Impedance Control. IEEE Trans. Robot. 2023, 39, 3536–3548. [Google Scholar] [CrossRef]
- Wang, L.; Sun, Z.; Wang, Y.; Wang, J.; Zhao, Z.; Yang, C.; Yan, C. A Pre-Grasping Motion Planning Method Based on Improved Artificial Potential Field for Continuum Robots. Sensors 2023, 23, 9105. [Google Scholar] [CrossRef]
- Lin, B.; Xu, W.; Li, W.; Yuan, H.; Liang, B. Ex Situ Sensing Method for the End-Effector’s Six-Dimensional Force and Link’s Contact Force of Cable-Driven Redundant Manipulators. IEEE Trans. Ind. Inf. 2024, 20, 7995–8006. [Google Scholar] [CrossRef]
- Dingley, G.; Cox, M.; Soleimani, M. EM-Skin: An Artificial Robotic Skin Using Magnetic Inductance Tomography. IEEE Trans. Instrum. Meas. 2023, 72, 1–9. [Google Scholar] [CrossRef]
- Teyssier, M.; Parilusyan, B.; Roudaut, A.; Steimle, J. Human-Like Artificial Skin Sensor for Physical Human-Robot Interaction. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi′an, China, 30 May 2021; pp. 3626–3633. [Google Scholar]
- Bae, J.-H.; Park, S.-W.; Kim, D.; Baeg, M.-H.; Oh, S.-R. A Grasp Strategy with the Geometric Centroid of a Groped Object Shape Derived from Contact Spots. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, St Paul, MN, USA, 14–18 May 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 3798–3804. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Value |
|---|---|
| Geometric shape | Cylinder |
| Parameter Name | Quality | Main Dimensions | ||
|---|---|---|---|---|
| Base | mm | |||
| Hooke joint | mm | |||
| Rigid link | mm |
| Parameter Name | Value | |
|---|---|---|
| CP1 | AC parameters | |
| Virtual force coefficients | ||
| CP2 | AC parameters | |
| Virtual force coefficients | ||
| Position control parameters | ||
| Parameter Benchmark | Stationary | ||||||
|---|---|---|---|---|---|---|---|
| AC | VIAC | AC | VIAC | AC | VIAC | ||
| CP1 | 41.7439 | 14.8340 | 35.3336 | 16.9801 | 37.0986 | 21.3826 | |
| 0.0795 | 0.1640 | 0.0163 | 0.2493 | 0.0414 | 0.1322 | ||
| (%) | 21.77 | 27.08 | 2.99 | 37.22 | 11.57 | 28.88 | |
| (%) | 64.51 | 51.88 | 42.22 | ||||
| 0.0770 | 0.2350 | 0.1942 | |||||
| CP2 | 15.7919 | 5.5727 | 17.0967 | 8.3274 | 15.7424 | 5.8160 | |
| 0.0323 | 0.2491 | 0.0278 | 0.1368 | 0.0370 | 0.0389 | ||
| (%) | 6.56 | 38.07 | 5.21 | 39.94 | 7.40 | 8.75 | |
| (%) | 64.85 | 51.35 | 63.05 | ||||
| 0.1234 | 0.1143 | 0.0071 | |||||
| Parameter Benchmark | Stationary | ||||||
|---|---|---|---|---|---|---|---|
| AC | VIAC | AC | VIAC | AC | VIAC | ||
| CP1 | 34.9408 | 12.5451 | 42.0974 | 14.3157 | 43.2579 | 15.5694 | |
| 0.0721 | 0.3482 | 0.0322 | 0.2765 | 0.0549 | 0.0909 | ||
| (%) | 16.97 | 66.09 | 7.05 | 54.85 | 9.53 | 24.24 | |
| (%) | 63.96 | 66.11 | 63.99 | ||||
| 0.1990 | 0.1338 | 0.0458 | |||||
| CP2 | 12.2118 | 4.6223 | 15.4770 | 4.3394 | 13.2079 | 6.0358 | |
| 0.0545 | 0.0711 | 0.0242 | 0.3020 | 0.0290 | 0.0372 | ||
| (%) | 14.77 | 12.64 | 4.59 | 148.45 | 5.14 | 8.38 | |
| (%) | 62.16 | 72.04 | 54.30 | ||||
| 0.0251 | 0.1089 | 0.0233 | |||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Sun, Z.; Wang, Y.; Wang, J.; Yan, C. Virtual-Integrated Admittance Control Method of Continuum Robot for Capturing Non-Cooperative Space Targets. Biomimetics 2025, 10, 281. https://doi.org/10.3390/biomimetics10050281
Wang L, Sun Z, Wang Y, Wang J, Yan C. Virtual-Integrated Admittance Control Method of Continuum Robot for Capturing Non-Cooperative Space Targets. Biomimetics. 2025; 10(5):281. https://doi.org/10.3390/biomimetics10050281
Chicago/Turabian StyleWang, Lihua, Zezhou Sun, Yaobing Wang, Jie Wang, and Chuliang Yan. 2025. "Virtual-Integrated Admittance Control Method of Continuum Robot for Capturing Non-Cooperative Space Targets" Biomimetics 10, no. 5: 281. https://doi.org/10.3390/biomimetics10050281
APA StyleWang, L., Sun, Z., Wang, Y., Wang, J., & Yan, C. (2025). Virtual-Integrated Admittance Control Method of Continuum Robot for Capturing Non-Cooperative Space Targets. Biomimetics, 10(5), 281. https://doi.org/10.3390/biomimetics10050281