Abstract
The ISO Standard 10819:2013 defines the method for evaluating the performances of antivibration (AV) gloves, but when used in real fields, the protection can be dissimilar to that labeled. This paper investigates the transmissibility, at the palm level, of three different types of AV gloves (air, gel, neoprene) and an ordinary leather glove, during the use of four similar electric hammers (average weight of 10 kg, and average impact energy of 18 J), in a limestone quarry plant. As the average triaxial transmissibility for all the hammers, results show very limited benefits in reducing the vibration (6%), with no significative differences among the different gloves. The working leather glove, instead, shows a transmissibility quite equal to the unit. Anyway, results can be different for the same glove when used among the different hammers, providing in some cases 19% of protection. Some differences can be found regarding the transmissibility through the three main axes for the same type of glove: the glove in gel seems to perform better in shear than in compression. The transmissibility in compression is around 20% higher than that provided by the manufacturers of the certified gloves. The usage of specific excitation curves during laboratory tests could help in providing a more accurate estimation of the transmissibility of the gloves when used with a specific tool.
1. Introduction
Pneumatic and electric hammers are widely used among many industrial and construction sectors, including mining activities, because of their versatility in drilling or splitting rocks and concrete, such for producing holes or little demolitions, often required for placing anchor bolts that support infrastructures, conduit, pipes, machinery, setting rebar, seismic upgrades. In developing countries, they are still commonly used in extraction activities of little quarries and mines, and moreover, they remain worldwide preferred in many secondary processes, such as small rock scaling activities or block shape redefinition.
These kinds of tools are known to produce high levels of vibration [1,2,3,4] that can be at the origin of several illnesses, better known as hand–arm vibration syndromes (HAVS) [5,6,7], moreover, they can generate high levels of vibration in low frequencies (around 31.5 Hz or lower), which are very hard to dissipate using mechanical devices directly applied to the hammers [8].
One of the recommended solutions is to reduce the exposure time, but this strategy does not appear suitable in many of the most common work situations, mainly because of organizational difficulties, and the increment of costs.
Wearing personal protection equipment (PPE), such as antivibration (AV) or vibration-reducing (VR) gloves, can provide a solution for reducing the vibration. For this reason, in the last years, we assisted in an increase in the production and distribution of this equipment, facilitated also by their relatively low cost, and the labeled promising performance. Anyway, the capability of these solutions to protect workers is not always proven, especially when used with percussive tools [9,10,11].
The ISO Standard 10819:2013 [12], defines the method for testing and evaluating the performance of the gloves, specifying the properties that gloves must have in terms of transmissibility, evaluated as the ratio between the vibration measured at the palm level inside the glove and that measured in the same conditions in a bare adaptor test. The standard specifies the minimum protection required for the glove for being labeled as antivibration: at least 10% of protection in the middle range of frequencies (25–200 Hz), and at least 40% in the high frequencies (200–1250 Hz).
Some researchers pointed out that the standardized tests cannot be considered representative of what happens when the gloves are used in real fields, with tools producing vibrations different from those reproduced on the instrumented handle during laboratory tests [10,13,14,15]. Furthermore, the ISO Standard protocol provides to measure the acceleration only along the forearm axis (in compression) and applies a fixed level of push and grip forces. In the real field, the accelerations are three-axials, so the gloves should be able to reduce the vibration not only in compression but also in shear. This means that laboratory tests should measure also the properties of the gloves along the x and y axes, in order to avoid errors in the estimation of the provided protection [10,16]. Moreover, the force applied by workers varies according to the job and the tool used, resulting in possible variations of the transmissibility provided by the gloves [17,18].
Additionally, since antivibration gloves are often thicker and stiffener than ordinary working gloves, the force applied by the workers may intensify, resulting in a possible reduction of dexterity, increasing the risk of musculoskeletal disorders, and affecting the safe use of the tool [19,20]. This must be considered, especially in all the cases in which the protection provided by the gloves is little, and an intensive force is required to manage the tools.
Users should also be aware that using certified AV gloves does not always mean having some benefit, even if different from that labeled, since in some cases the reduction of the vibration provided by AV gloves resulted similar to that provided by normal working gloves [10,21].
In light of the previous considerations, this paper aims to investigates the properties of three different kinds of antivibration (AV)/vibration-reducing (VR) gloves, when used in the real field for chiseling limestone rocks, using four types of electro-pneumatic hammers in a quarry plant. Results are also compared with the transmissibility provided by an ordinary working leather glove, similar to those normally used by workers for this kind of job.
2. Materials and Methods
2.1. Materials
Since electro-pneumatic hammers are of different weights and average impact energy, in the present study we limited the investigation to similar tools, choosing hammers of around 10 kg and with the energy of each pulse during chiseling in the range 12–23 J. The technical specifications of the hammers and the chisels used are reported in Table 1.

Table 1.
Technical specifications of the used hammers and chisels.
A 3-D printed modified hand-held adaptor was used for helping the subjects to maintain the accelerometer inside the glove in a fixed position during the trials. It was previously specifically designed and tested for measurements of the transmissibility of AV gloves [22]. Both the dimensions and the weight of the adaptor meet those reported in the standard ISO 10819:2013 [12], with a little variation (1.45 mm higher), since we needed to insert a 10 mm cube accelerometer (Larson & Davis three-axial SEN 040F (Larson & Davis, Provo, UT, USA), 5 g weight).
The adaptor was printed using an FDM (fused deposition modeling) printer, with a 1.75 mm filament of polylactide (PLA) and 0.4 mm nozzle at 70% of infill. An indicator (landmark) was drawn along the longitudinal axis of the adaptor, so users could easily check the correct position of the accelerometer during the measurements, reducing misalignments inside the gloves, Figure 1a,b. The landmark comes out through a little slit in the seam of the glove, made between the thumb and index finger.
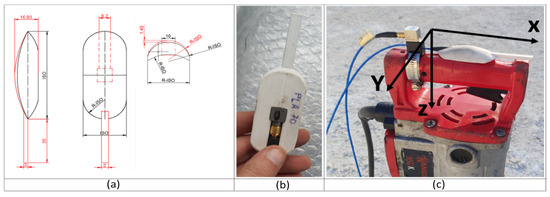
Figure 1.
(a) Dimensions of the adaptor (mm) (b) 3-D printed adaptor; (c) position and orientation of the accelerometers.
A second accelerometer (Larson & Davis three-axial SEN 020 040F (Larson & Davis, Provo, UT, USA), 14 mm × 20.3 mm × 14 mm, 10.5 g weight) was fixed on the rear handle of the hammers, as close as possible to the hand position, with the same orientation of the accelerometer inside the adaptor, Figure 1c. This accelerometer was firmly secured using a hose metal clamp.
A multi-channel data acquisition system (Sinus Apollo Light Box_LT_8Ch, SINUS. Messtechnik GmbH, Leipzig, Germany) was used for collecting data. Measurements of the accelerations were analyzed by the software Samurai (Version 2.10.3.368, SINUS. Messtechnik GmbH, Leipzig, Germany), while both the software SPSS (Version 29.0, IBM, New York, NY, USA) and Excel (Version 2303, Microsoft, Redmond, WA, USA) were used for statistical analysis. The accelerometers were checked using the calibrator PCB 394C06 before and after each set of measurements.
Four types of gloves were analyzed, three of them with anti-vibration properties, and a normal working leather glove as reported in Figure 2. Table 2 reports the specifications of the gloves, those in air and neoprene are both certified as antivibration according to the ISO Standard 10819:2013.
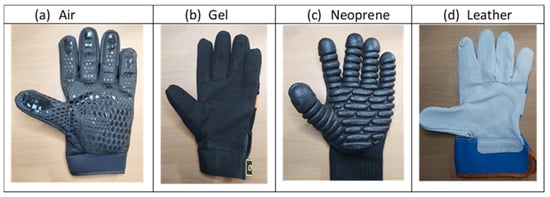
Figure 2.
Photos of the tested gloves: (a) glove in air; (b) glove in gel; (c) glove in neoprene; (d) glove in leather.
Table 2.
Technical specifications of the tested gloves.
2.2. Experimental Activity
All the tests were performed on the same kind of rock, in a limestone quarry plant, with the chisel perpendicular to the ground. The subjects recruited for the tests were three healthy male workers, with at least 1 year of experience in the use of electro-pneumatic hammers. Subjects’ data are reported in Table 3. For each measurement, the subjects maintained approximately the same body and hand–arm posture, holding the tools with both the hands on the rear and lateral handles, Figure 3.
Table 3.
Anthropometry data of the subjects recruited for the measurements (hand length = tip of middle finger to crease at the wrist; hand circumference measured at the metacarpals).

Figure 3.
Measurement campaign.
Measurements were taken only on the right hand, positioned on the rear handle of the tools. Since our purpose was to measure the transmissibility of the gloves during their real usage, we did not control the applied forces. Thus, the subjects were asked to use the tools as workers do in real jobs, letting them be free to vary the grip and push forces as needed.
Four trials for each subject were performed using the same glove and hammer. Each subject used all the tested gloves and all the hammers, performing a total of 64 trials. More trials than those reported in the analysis were performed, choosing only those considered “good”: no breaks during the measurement, no movement of the hand, and no problems of the inconsistency of the rock. Every trial lasted around 15 s, without moving the hammer after the beginning of the penetration. All the tests were randomized for each of the used hammers, following the scheme reported in Figure 4. The scheme reports a single session of measurements, each session was repeated four times for each hammer. A total of 192 measurements were collected for the analysis. A break of around 20–30 min was made after each session for checking the data and letting subjects rest. Measurement recordings started approximately 5 s after the tool was in function, lasting for 10 s, and ended before the tool stopped functioning. The average 15 s duration of the trials was considered adequate both to ensure uninterrupted chiseling during each measurement cycle and to provide the stabilization of vibration data, other than to allow removal of the chisel from the rock. A different penetration point was chosen for each trial.
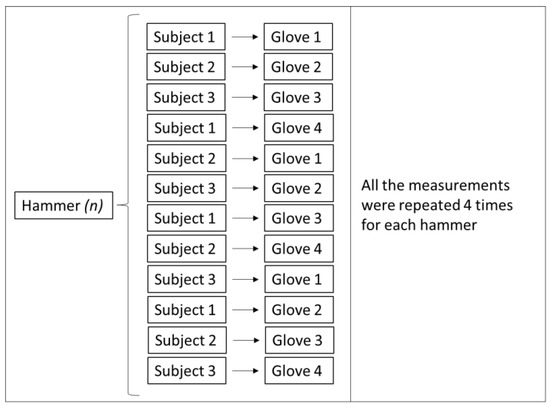
Figure 4.
Typical single session of measurements. Four sessions were repeated for each hammer.
2.3. Data Analysis
The corrected hand–arm weighted (Wh) vibration transmissibility was calculated, starting from the one-third octave frequency analysis (i-th) of the measured accelerations, according to the following formulas based on the method provided by the ISO Standard 10819:2013, using the bare hand adaptor acceleration instead of the bare adaptor acceleration.
where
- Tb(T)–Tb(M)–Tb(H) are the total–medium–high “bare-hand” transmissibility measured when iL = 6.3 Hz and iU = 1250 Hz; iL = 25 Hz and iU = 200 Hz; iL = 200 Hz and iU = 1250 Hz, respectively;
- Abxi–abyi–abzi are the accelerations measured at i-th frequency on the bare hand for x-y-z-axis, respectively;
- Whi is the hand-arm weighted value for i-th frequency;
- aRxi–aRyi–aRzi are the accelerations measured at i-th frequency on the handle of the tool for x-y-z-axis, respectively;
- Td(T)–Td(M)–Td(H) are the total–medium–high “direct” transmissibility measured when iL = 6.3 Hz and iU = 1250 Hz; iL = 25 Hz and iU = 200 Hz; iL = 200 Hz and iU = 1250 Hz, respectively;
- agxi–agyi–agzi are the accelerations measured at i-th frequency on the gloved hand for x-y-z axis, respectively;
- Tc(T)–Tc(M)–Tc(H) are the total–medium–high “corrected” transmissibility measured when iL = 6.3 Hz and iU = 1250 Hz; iL = 25 Hz and iU = 200 Hz; iL = 200 Hz and iU = 1250 Hz, respectively.
Statistical analysis was performed using ANOVA one-way test for multiple comparisons and Tukey test for pair comparisons, in all cases in which data were normally distributed. In case of not normally distributed data, or when samples were limited, we preferred not parametric tests: Friedman test for multiple comparisons and Wilcoxon signed-rank tests for pair comparisons in case of data collected from the same subject and the same hammer on different gloves; while the Kruskal–Wallis test for multiple comparisons and Mann–Whitney U test for pair comparisons were used for independent data set, such in case of the same subject using different hammers and different gloves.
3. Results
3.1. Hammers’ Vibration
The average weighted triaxial acceleration spectra, measured both on the handle (aR(x,y,z)) and inside the adaptor (bare hand) (ab(x,y,z)), are reported in Figure 5. These two vibrations show some differences due to the different locations of the accelerometers, other than to the variation of the force applied, and to the biodynamic response of the hand [23]. The value of the triaxial acceleration directly measured on the handle is generally higher, especially in the high frequencies range, while the opposite can happen at the percussion frequencies. In our measurements, the average difference for the Wh-weighted acceleration is around 1 m/s2, except for the hammer Metabo (Metabowerke GmbH, Nuertingen Germany), which resulted in 3.4 m/s2 (standard deviation 0.2 m/s2).
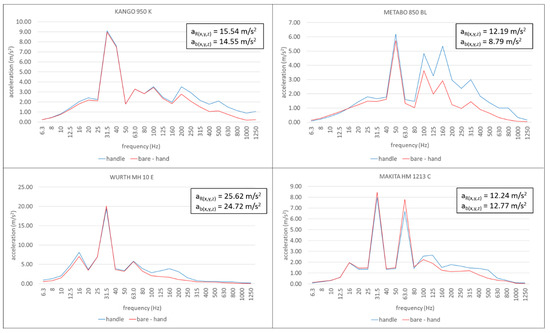
Figure 5.
Wh-weighted triaxial vibration on the handle (aR) and bare hand adaptor (ab).
One of the possible reasons is that the hammer Metabo 845 BL (Metabowerke GmbH, Nuertingen Germany) is equipped with a vibration-reducing system consisting of a spring—or some other damping material—connected to one side of the handle, close to the trigger, while the other side is fixed with a hinge. For this type of configuration, it is expected to have higher reduction of the vibration in the upper part of the handle, as shown in Figure 6. The same vibration-reduction system is actually assembled also on the hammer Makita (Makita Corporation, Aichi, Japan), but in this case, it did not show the same capability to reduce the vibration. This could be due to the different magnitude of the accelerations at the high frequencies between the two hammers. Additionally, it must be considered that the hammer Metabo was at its first usage, while the hammer Makita had several years of work, and this could have affected the efficiency of the vibration-reducing system.
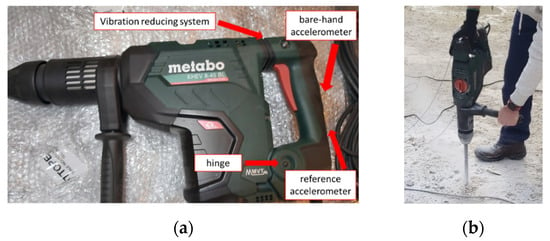
Figure 6.
(a) Vibration reducing system for the hammer METABO and position of the accelerometers; (b) the hammer during the measurements.
3.2. Vibration Spectra Comparisons and Transmissibility
Figure 7 reports the triaxial Wh weighted accelerations measured both on the bare hand adaptor (ab(x,y,z)) and wearing the gloves (ag(x,y,z)). These two measurements cannot be conducted at the same time, and in our case of real field investigations, the acceleration produced by the hammers varies at any trial.
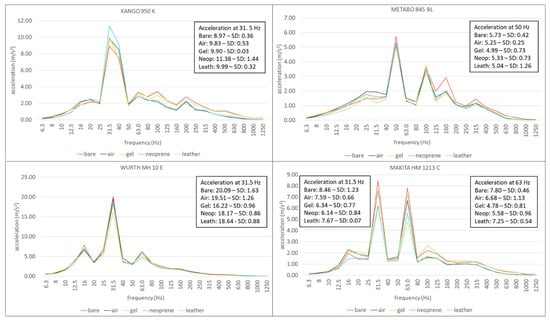
Figure 7.
Triaxial Wh-weighted accelerations measured on the bare hand and inside the gloves as the average for all the subjects. SD = standard deviations among the subjects.
For this reason, data reported in Figure 7 are not the real capability of the gloves to reduce the vibration, but only a comparison of the average vibration measured using the adaptor inside and outside the gloves. An estimation of the capability to reduce vibrations is calculated hereinafter using also the data measured by the reference accelerometer.
Comparing the values, at the main percussion frequencies (variable from 31.5 Hz to 63 Hz depending on the hammer) measured using the adaptor, the acceleration inside the gloves is smaller than that on the bare hand for almost all the used hammers, except for the hammer Kango 950 K (Milwaukee Electric Tool Corporation, Brookfield, WI, USA).
In low frequencies (below 25 Hz), for almost all the hammers, the vibration measured inside the gloves results are similar to that measured on the bare hand, while at high frequencies, over 200 Hz, the opposite happens, except for the hammer Wurth (Wurth, Künzelsau, Germany) in which both the data are very similar.
Table 4 and Table 5 report the average (48 and 12 trials, respectively), Wh-weighted transmissibility for each used hammer and glove, calculated using the corrected method, both as triaxial Tc(T) and for each single axis Tc(x), Tc(y), Tc(z) in the entire frequency range 6.3–1250 Hz. In the same tables are also reported the Wh weighted transmissibility measured only along the z-axis, both in the middle frequencies Tc(M-z) (25–200 Hz) and in the high frequencies Tc(H-z) (200–1250 Hz), as indicated by the ISO Standard 10819:2013. Table 6 reported the triaxial transmissibility among the different hammers and subjects.
Table 4.
Transmissibility and standard deviation for the different gloves as the average of all the tested hammers.
Table 5.
Average transmissibility, median, and standard deviation for each single hammer.
Table 6.
Triaxial transmissibility among the subjects and hammers.
Considering the transmissibility within the entire frequency range (6.3–1250 Hz) reported in Table 4, the range of protection results is very limited and similar for all the tested AV/VR gloves, varying from 4% (Tc(T) = 0.96) for the air glove, to around 8% (Tc(T) = 0.92/0.93) for the gloves in neoprene and gel. In any case, the statistical analyses (ANOVA alpha = 0.05) do not confirm the differences among the three AV/VR gloves (p-value = 0.0872). So, in this case, an average protection of around 6% can be considered representative of all the tested AV/VR gloves. The transmissibility of the leather glove differs from the others and is quite equal to one (Tc(T) = 1.02; Tukey p-value = 0.0017), showing absence of protection.
Statistical analysis generally confirms the differences in transmissibility for the same type of glove among the different axes, except for the glove in air (ANOVA p-value = 0.5829). In particular, the glove in neoprene performs better along the x-axis compared to the y-axis (Tukey p-value = 0.0029), the glove in leather performs better along both the x and z axes compared to the y-axis (Tukey p-value = 0.003) and the glove in gel performs better in shear along the x-axes (Tc(x) = 0.82), than in compression along the z-axis (Tc(z) = 0.94) (Wilcoxon p-value < 0.00001).
To compare the results to the method of calculation used by the ISO Standard 10819:2013, the transmissibility along the z-axis, both in the middle frequencies Tc(Mz) (25–200 Hz) and in the high frequencies Tc(H-z) (200–1250 Hz), is also reported. In the middle frequencies, the protection provided by the AV/VR gloves is very limited and varies from 5% (gel glove) to 7% (neoprene glove), without statistical differences (ANOVA p-value = 0.5826), so an average transmissibility of Tc(M-z) = 0.94 (6% of protection) can be considered representative for this range of frequencies.
In the high frequencies, the protection provided by the AV/VR gloves is higher. For the gloves in air and neoprene, the transmissibility is similar (Tukey p-value = 0.7841), so an average protection of 34% can be considered representative. Minor protection (19%) is provided by the glove in gel (Tukey p-value = 0.001). The leather glove does not provide protection both in the middle (Tc(M-z) = 1.01) and in the high (Tc(H-z) = 0.98) frequency range.
Both the gloves in air and neoprene are classified by the manufacturers as antivibration (AV) according to the ISO Standard 10819:2013, but as shown above, the protection measured in our investigation results is lower than that label. As reported in Table 2, the declared transmissibility in the middle frequencies range is Tc(M-z) = 0.75 for the air glove and Tc(M-z) = 0.86 for the neoprene glove, while when used with our hammers both result higher: Tc(M-z) = 0.94 and Tc(M-z) = 0.93, respectively. The declared transmissibility in the high frequencies is Tc(H-z) = 0.45 for the air glove and Tc(H-z) = 0.59 for the neoprene, these too, resulting differently from those measured in our measurements campaign: Tc(H-z) = 0.65 for the air glove and Tc(H-z) = 0.68 for the neoprene glove.
Table 5 examines the transmissibility within the entire frequency range (6.3–1250 Hz) for each type of the used hammer. The air glove shows a triaxial transmissibility very similar when used with the hammers Wurth, Metabo, and Makita, providing protection around 6% (Tc(T) = 0.93–0.94), while when used with the hammer Kango 950 K, it is not able to provide protection Tc(T) =1.02. For the glove in gel, the Kruskal–Wallis test confirms some differences among the different types of hammers, in particular when used with the hammer Wurth MH 10 E, this kind of glove provides protection of around 20% (Tc(T) = 0.81) (Mann–Whitney U Test p-value < 0.0002), while, when used with the hammer Kango 950 K, it does not provide protection (Tc(T) = 1.01; p-value < 0.0285). No statistical differences are found when the gel glove is used with the other two hammers, showing an average protection of around 7%.
Regarding the glove in neoprene, statistical analysis shows that the only difference in transmissibility is when it is used with the hammer Kango 950 K (Tc(T) = 1.05; p-value < 0.002), while for the rest of the hammers, the triaxial transmissibility can be considered as the average of those reported in Table 5: Tc(T) = 0.88 (p-value > 0.47). Regarding the leather glove, the statistical analysis does not show differences in the vibration reduction among the hammers, so the transmissibility can be considered equal to 1.
When AV/VR gloves are used with the hammer Kango 950 K, the average triaxial transmissibility results are similar to that measured using the working leather glove. The reason could be due to the fact that at the peak percussion frequency of 31.5 Hz, all the tested gloves amplify the vibration. There are no deep differences in terms of weight and average impact energy comparing this hammer to the others.
The standard deviation of the transmissibility along y-axis is larger across all types of gloves and hammers (Table 5), especially in the middle frequencies range (25–200 Hz). In our measurements, this trend is always confirmed across the hammers and gloves. We did not notice differences in S.D. among the subjects, so we exclude something related to the different morphology of the hand, posture, or force applied by one of them. As far as we know, in the literature, there is a lack of data reporting the S.D. of the transmissibility on electro-pneumatic hammers among the different axes when used in real field. These data would have been useful for comparison. We checked for possible variability of the acceleration along the y-axis among the different trials, but we did not find evidence of that. Maybe the orientation of the chisel, in our case parallel to the y-axis, other than the posture of the subjects (similar for everyone) could have induced variability of the force applied by the subjects along y-axis. Further investigations, also changing the orientation of the chisel, are needed for better evaluating these findings.
3.3. Transmissibility Spectra Analysis
The frequency analysis of the transmissibility, for each single axis and for the triaxial vector, is reported in Figure 8 as the average of all the used hammers, while Figure 9, Figure 10, Figure 11 and Figure 12 reported the transmissibilities measured for each single hammer.
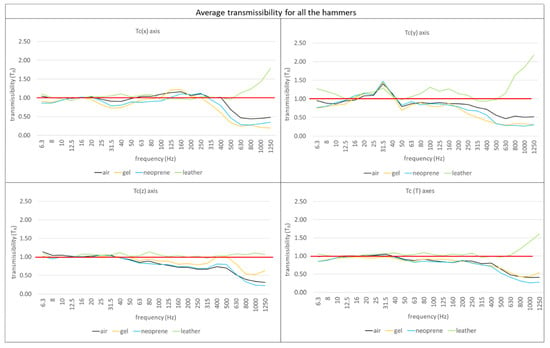
Figure 8.
Total triaxial transmissibility, and along every single axis as the average for all the tested hammers.
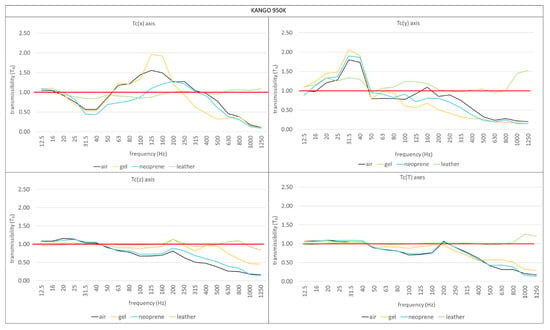
Figure 9.
Total triaxial transmissibility, and along every single axis for the hammer Kango 950 K.
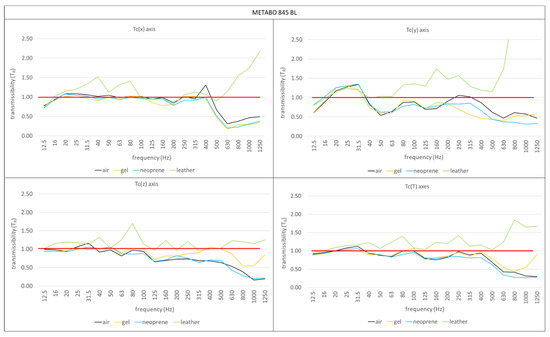
Figure 10.
Total triaxial transmissibility, and along every single axis for the hammer Metabo 845 BL.
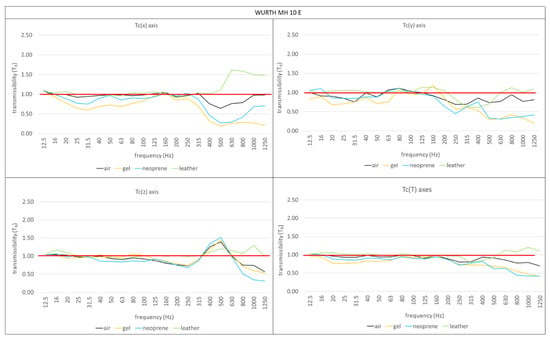
Figure 11.
Total triaxial transmissibility, and along every single axis for the hammer Wurth MH 10 E.
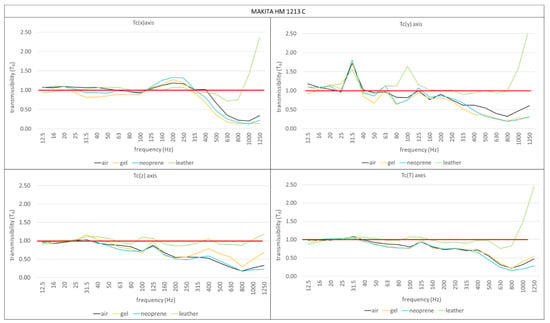
Figure 12.
Total triaxial transmissibility, and along every single axis for the hammer Makita HM 1213 C.
3.3.1. Triaxial Spectra Analysis
Triaxial transmissibility (Tc(T)) reported in Figure 8, shows that all the tested gloves have very similar behavior, and are not, in general, able to reduce vibrations in frequencies lower than 40 Hz. Considering that the hammers used for our investigations have a typical peak of vibration at 31.5 Hz, can be explained why the tested AV/VR gloves are not, in general, able to provide good protection with these kinds of tools.
Examining the differences among every single hammer in the low frequencies (6.3–50 Hz), the gloves in gel and neoprene can reduce some vibration when used with the hammer Wurth MH 10 E (Figure 11). The average value of the triaxial transmissibility in this range of frequencies is Tc(T) = 0.80 for the gel glove and Tc(T) = 0.88 for the glove in neoprene. When used with the rest of the hammers, the transmissibility results are higher: Tc(T) = 0.96 for the gel glove and Tc(T) = 0.97 for the neoprene glove. The glove in the air is less capable to reduce the triaxial vibration in this range of frequencies (6.3–50 Hz), showing an average transmissibility quite flat and equal to the unit, similar to that provided by the working leather glove. In some cases, both previous gloves produce a little increment of vibration (Figure 9 and Figure 10).
Over 50 Hz, all the tested gloves are in general able to reduce some vibration. Examining the overall average triaxial transmissibility (Figure 8), the behavior of the tested AV/VR gloves in the range of 50–400 Hz is similar, providing a protection variable in the range of 11%–17%, while the leather glove is not able to provide protection. In this range of frequencies, we find more marked differences among the different hammers. As reported in Figure 11 for example, for the hammer Wurth MH 10 E, the transmissibility in the range 50–400 Hz results are similar to that in the low-frequency range, while when using the Makita HM 1213 C (Figure 12), it results lower.
Regarding the differences among the different types of AV/VR gloves, again the transmissibility results are different among the hammers used. For example, in the case of the hammer Makita HM 1213 C, the triaxial transmissibility among the AV/VR gloves results are similar in the entire range of frequencies (Figure 12), while using the hammer Kango 950 K (Figure 9), only the gloves in air and neoprene show similar behavior, while the glove in gel provides lower protection in the range 50–200 Hz and higher protection in the range 200–400 Hz. A similar behavior was found with the hammer Metabo 845 BL (Figure 10), but in this case, the glove in neoprene performs a little better reduction of transmissibility, while both the gloves in gel and air show the same protection.
Over 400 Hz, the capability to reduce vibrations is much more marked for all the tested AV/VR gloves, without notable differences among the different hammers, while on the contrary, the leather glove tends to increase the transmissibility. As reported in Figure 8, the glove in neoprene performs the lower transmissibility (from 0.53 at 500 Hz to 0.26 at 1000 Hz), while the behavior of the other two AV/VR gloves results are similar (from 0.66 at 500 Hz to 0.44 at 1000 Hz).
3.3.2. Spectra Analysis among the Different Axes
More marked differences are found among the gloves and the used hammers, along the different axes.
In compression (z-axis), the average transmissibility for all the hammers (Figure 8), shows similar behavior to that revealed for the triaxial transmissibility, showing for the AV/VR gloves no protection in the frequencies below 40 Hz, and progressive reduction of the transmissibility over 50 Hz. In this case, the glove in the gel has higher transmissibility, while the gloves in air and neoprene are very similar. The leather glove shows quite linear behavior, having transmissibility close to the unit in the entire frequency range. Considering every single hammer, the previously reported behavior remains, in general, the same for the hammers Kango, Metabo, and Makita reported in Figure 9, Figure 10 and Figure 12, while for the hammer Wurth all the tested gloves show a similar behavior, providing an increment of the transmissibility at 500 Hz. The leather glove increases the transmissibility in almost all the frequency ranges when used with the hammer Metabo (Figure 10), while it shows an average transmissibility equal to one when used with the hammers Kango and Makita (Figure 9 and Figure 12). With the hammer Wurth, the behavior of the leather glove results is similar to that provided by AV/VR gloves, except at the high frequencies, over 400 Hz.
Along the x-axis, considering the average transmissibility for all the hammers (Figure 8), all the AV/VR gloves perform a significant reduction of the transmissibility of only over 400 Hz. The glove in gel seems to reduce more vibration compared to the others, both in the range of 20–50 Hz, including the main percussion frequency for these kinds of hammers, and over 250 Hz. The glove in leather is not able to reduce vibration in almost all the range of frequencies, showing an increment of transmissibility over 630 Hz. Regarding every single hammer, the behavior of the AV/VR gloves is, in general, similar to that observed as the average for all the hammers. The only exception concerns the hammer Kango, where the glove in neoprene performs the best reduction at the low frequencies, while the glove in the gel is more able to reduce vibrations over 200 Hz. The leather glove has quite linear transmissibility equal to one in quite all the frequencies range when used with the hammer Kango (Figure 9), and until 500 Hz when used with the hammers Wurth and Makita (Figure 11 and Figure 12), while when used with the hammer Metabo it generally increases the transmissibility in almost all the range of frequencies.
Along the y-axis, examining the average transmissibility for all the hammers (Figure 8), the AV/VR gloves are not able to reduce the vibration at the main percussion frequency of 31.5 Hz, while, for the rest of the frequencies, they perform good protection, similar to that reported in compression (z-axis). The gloves in gel and neoprene have the lowest transmissibility compared to that in air.
The glove in leather shows an increment of the transmissibility in almost all the ranges of frequency. Examining every single hammer, the only case in which the gloves, including the leather one, can reduce the transmissibility in almost all the range of frequencies is when used with the hammer Wurth. For the rest of the hammers, the AV/VR gloves are not able to reduce the vibration at the peak frequency of 31.5 Hz, while, in general, they are able to reduce some vibration over 63 Hz. When used with the hammer Metabo, the leather glove increments the vibration in almost all the frequency ranges.
4. Discussion
This paper investigates three different types of AV/VR gloves and a normal working leather glove in terms of transmissibility at the palm level during the use of four similar electric hammers (average weight of 10 kg, and average impact energy of 18 J), when chiseling in vertical position in a limestone quarry plant.
The overall results show that the tested AV/VR gloves have limited benefits in vibration reduction when these types of tools are used, probably because they are not, in general, able to reduce the peaks of vibrations that these hammers produce in the low frequencies range. In terms of triaxial transmissibility, our measurements show an average reduction of 6%, without statistical differences among the AV/VR gloves. The working leather glove, instead, shows a transmissibility quite equal to the unit. These results fit within the average protection generally provided by AV/VR gloves when measured with percussive tools in other investigations [10,14].
Anyway, it must be considered that real field investigations differ from those performed in laboratory tests using the shaker according to the ISO Standard 10819:2013 and have some limits concerning the reliability of the results [15].
In laboratory tests, the accelerometers used for measuring vibrations inside and outside the gloves are positioned very close to each other, both in line along the z-axis. Moreover, the measurements are performed at the same time. In this way, errors resulting from accelerometers’ misalignments and different conditions among the trials are very limited.
In real field investigations, such situations cannot be reproduced, since the reference accelerometer cannot be positioned inside the handle of the hammer and both the measurements, inside and outside the glove, cannot be performed simultaneously. Moreover, because many other factors may affect glove performances, such as the grip and push forces applied and the different postures, substantial variations among measurement data are often reported, resulting in more difficulty in the reliable assessment of the glove's transmissibility. As reported by Dong et al. 2014 [11] this is mainly the reason because laboratory tests, such as those using the transfer function method [24,25], are often preferred to measure tool-specific performances of gloves.
In order to limit the above-reported errors, we used the corrected method for assessing the transmissibility, instead of the direct one, because the linear offset between the reference accelerometer and that positioned inside the adaptor can introduce moment arms that can vary the vibration revealed by the accelerometers. The simple ratio between the inside glove adaptor acceleration and the reference acceleration, often used in laboratory tests on the shaker, would have introduced errors that are typical of real field investigations. We also tried to limit postural variability using the hammers only in a vertical position, without moving the chisel after the beginning of the penetration. The use of the second accelerometer, positioned on the handle, helped also to limit errors due to the variability of the accelerations at each trial.
Possible misalignments of the accelerometer inside the glove are also known as relevant factors affecting the properties of the gloves when evaluated along the different axes, resulting often in underestimation of transmissibility up to or even in excess of 20% [26]. We tried to improve the reliability of the tests using a modified adaptor, with a protrusion along the longitudinal axis coming out through a little slit, made in the seam of the glove, between the thumb and index finger [22].
In our measurements, statistical analysis generally confirms different properties of the gloves in reducing the transmissibility among different axes, when calculated as the average of all the tested hammers (Table 4). These results are consistent with those reported in other studies [11,18].
Hewitt et al. 2015 [14] report that AV/VR gloves are generally most effective in isolating vibration along the forearm direction (z-axis), while they are least effective in the direction of a tool handle (x-axis in our case). This is explained, mainly because the mass of the hand–arm system involved in the response in the x direction is generally the lowest.
In our case, the transmissibility of the gloves when used with electro-pneumatic hammers does not show this trend, since the z-directions often appear not the most effective in the reduction of the transmissibility. Anyway, what was reported by Hewitt et al. 2015 [14] must be considered a general trend, not always confirmed in the case of a specific tool.
For example, Dong et al., 2014 [11] estimated the vibration reduction of four types of gloves in simulated laboratory tests, using the transmissibility properties of the gloves and synthetized vibration spectra of different tools, including chipping hammers. In the case of the chipping hammer, they found that both the gloves in neoprene and gel were most effective in reducing the vibration along the y-axis (Tc(y) = 0.8 and 0.78, respectively), instead of the z-axis (Tc(z) = 0.92 and 0.94).
In our case, both the gloves in neoprene and gel performed better along the x-axis than along the z-axis. The capability of the gel glove to reduce better in shear than in compression was found also in another measurements campaign we made using a lightweight hammer (3 kg) for chiseling a limestone block [27]. These results are also consistent with those reported in another study made using simulated laboratory tests (McDowell et al., 2013) [18].
Since the air and the neoprene gloves are certified as antivibration according to the ISO Standard 10819:2013, we also calculated the transmissibility in compression (z-axis), both in the middle (25–200 Hz) and high (200–1250 Hz) frequencies range. Results, as the average for all the used hammers, are different from that labeled, showing a reduction of the vibration in the middle frequencies of 6% for the air glove, and 7% for the neoprene glove, in contrast to those declared of 25% and 14%, respectively, while in the high frequencies, the protection results in 35% for the air glove and 32% for the neoprene glove, instead to those declared of 55% and 41%.
These differences between tool-specific measurements and the ISO Standard 10819:2013 tests were found in many other investigations. As reported by Dong et al., 2014 [11] and Hewitt et al., 2015 [14], the ISO Standard method, used for evaluating the transmissibility of gloves, is primarily intended to screen gloves, but cannot be used for determining the tool-specific isolation performances of gloves. This is because the standardized method measures the frequency-weighted acceleration along the forearm direction with a specified hand-arm posture, while forces of 30 N grip and 50 N push are applied to a vibrating 40 mm cylindrical handle. Such situations are substantially different from those in the real field. Moreover, when used with a specific tool, gloves’ properties can change, primarily for the following reasons (Dong et al., 2014 [11]): “(i) no powered hand tool generates the idealized vibration spectrum required in the standardized glove test; (ii) the glove effectiveness is direction-specific; (iii) the glove effectiveness is location-specific, because the glove properties and the distribution of hand apparent mass generally vary with the locations of the glove and hand”.
The findings of our investigations also underline the different properties of the gloves when used with different hammers, confirming that the transmissibility of the gloves is tool dependent [14]. In our case, for example, the glove in the gel can provide a vibration reduction of around 20% when used with the hammer Wurth MH 10 E, while it results useless when used with the hammer Kango 950 k. The two hammers are very similar in average impact energy (23 J for the Wurth and 20 J for the Kango), while the difference in weight is a little higher (9.7 kg for the Wurth and 11.8 Kg for the Kango). The same kind of bit was used in both tests. So far, for a more accurate estimation of the capability of the gloves to reduce vibrations when used with specific tools, specific excitation curves should be used during standardized laboratory tests.
Considering the frequency analysis as the average of the used hammers, results of our investigations show that all the tested gloves are not, in general, able to reduce the triaxial vibration in the frequencies range below 40 Hz, a reduction of around 15% is generally provided in the range 50–400 Hz, while an average of 55% of reduction is provided over 500 Hz. This property of AV/VR gloves to reduce better in high frequencies range is consistent with other studies investigating the transmissibility of the gloves [13,18,25]. We found the above-reported behavior also in compression (z-axis), while in shear the transmissibility is less categorizable, showing a reduction both at the percussion frequency (31.5 Hz) and over 400 Hz along the x-axis, and an increment at the percussion frequency and a reduction at over 40 Hz along the y-axis. The leather glove shows a transmissibility equal to the unit in compression (z-axis) among all the frequencies range, while it tends to increase the vibration along the x-axis in the range 63–250 Hz and over 630 Hz, and along the y-axis over 800 Hz.
As previously reported, in our tests the acceleration measured by the reference accelerometer, compared to that measured by the accelerometer positioned inside the adaptor during the bare—hand tests, are in general dissimilar. The value of the acceleration directly measured on the handle is generally higher, especially in the high frequencies range, while the opposite can happen at the percussion frequencies. The difference of the triaxial Wh-weighted acceleration, results in our case variable from 1 to 3.4 m/s2, depending on the used hammer. These differences are consistent with those reported in other studies [23,28] and should be considered also during the measurements of hand-arm vibration.
The anthropometry of the subjects performing the tests is another factor influencing the results of gloves’ transmissibility measurements [29]. For this reason, the 2013 version of the ISO Standard 10819 prescribes recruiting at least five subjects for the tests, incrementing the number previously prescribed in the 1998 version, fixed at three. In our case, the relatively small sample of subjects recruited for the tests (n. 3) could have introduced imperfections in the results. We tried to partially compensate for the flaws by increasing the overall number of trials (4) for each subject. Should be observed anyway, as in our tests the average transmissibility for all the used hammers results were very similar among the different subjects when the same type of glove was used, moreover, the intra-subject variability results were higher than the variability among the subjects (Table 6).
Some other clarifications are needed regarding the positions of the accelerometers in our investigations. Both the inside adaptor accelerometer and the reference one are positioned on the hammers’ handles, but the latter is often not perfectly flat and orthogonal to the chisel. This means that the accelerations measured along the different axes are intended only to refer to the hand of the operators and not to the axes of the hammers. In particular, the z-axis of our measurements is not exactly parallel to the chisel.
5. Conclusions
Results of our investigation show that the capability of AV/VR gloves to reduce vibration when used with percussive tools such as electro-pneumatic hammers, weighing around 10 kg, is, in general, low.
Anyway, results can be different among the used hammers, even when, as in our case, the tools are very similar in average impact energy, weight, and percussion frequency, other than used in the same manner. So, it is established that in general it cannot be expected to have a very high reduction of vibrations with AV/VR gloves when used with these kinds of tools, in some cases, they could provide some benefit, as happened with the glove in gel when used with the hammer Wurth MH 10 E. In this case, we measured a triaxial reduction of the vibration of around 20%.
Data reported on the labels of antivibration gloves, calculated following the ISO Standard 10819:2013, may not be representative of what happens during the use of a specific tool. In our case, for all the tests and for both the AV gloves, the average transmissibility resulted higher, both in the middle and in the high-frequency range, when compared to that provided by the manufacturers.
The use of synthesized specific excitation curves during laboratory tests could help provide more accurate values of the transmissibility of the gloves when used with specific tools.
Employers should consider the limitations associated with this kind of personal protection equipment. They should possibly resort to direct measurements in the real field, for checking for more reliable results in terms of the capability of gloves to reduce vibrations, before providing workers with these protections.
Further considerations and limitations:
- -
- Investigations were carried out using the tools only in a vertical position, which is not fully representative of their real usage.
- -
- Only three workers were involved in the tests; this potentially results in imperfections regarding the estimation of the average transmissibility of the gloves.
- -
- Even though we intentionally reported the data of the hammers used in our investigations, some of the hammers had several years of usage, so their maintenance may not have been appropriate, resulting in a possible increase in the vibration produced.
Author Contributions
Conceptualization, G.A.D., A.A. and D.L.; methodology, G.A.D., A.A. and D.L.; investigation, G.A.D., A.A. and D.L.; writing and editing, G.A.D., A.A. and D.L. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
The study was conducted in accordance with the Declaration of Helsinki and approved by the Institutional Research Committee of the University of Roma Tre (Prot. n. 0000118-28/02/2023); Project identification code: 16000-2002-G-C-A.ATT.C._001.
Informed Consent Statement
Informed consent was obtained from all subjects involved in the study.
Data Availability Statement
The additional data supporting this research can be directly requested to the corresponding author: andrea.antonucci@unich.it; andrea.antonucci@uniroma3.it.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Griffin, M.J. Measurement, evaluation, and assessment of occupational exposures to hand-transmitted vibration. J. Occup. Environ. Med. 1997, 54, 73–89. [Google Scholar] [CrossRef] [PubMed]
- Rempel, D.; Antonucci, A.; Barr, A.; Cooper, M.R.; Martin, B.; Neitzel, R.L. Pneumatic rock drills vs. electric hammer drill: Productivity, vibration, dust, and noise when drilling into concrete. Appl. Ergon. 2019, 74, 31–36. [Google Scholar] [CrossRef] [PubMed]
- Clarke, J.B.; Dalby, W.; Gunn, J.F. Chipping hammer vibration. Scand. J. Wok Environ. Health. 1986, 12, 351–354. [Google Scholar] [CrossRef] [PubMed]
- Antonucci, A.; Barr, A.; Martin, B.; Rempel, D. Effect of bit wear on hammer drill handle vibration and productivity. J. Occup. Environ. Hyg. 2017, 14, 640–649. [Google Scholar] [CrossRef] [PubMed]
- Akinlolu, M.; Haupt, T.C. The hand-arm vibration syndrome: A bibliometric co-occurrence analysis of neurological disorder in construction workers. In Proceedings of the 15th Built Environment Conference, Virtual online, 27–28 September 2021. [Google Scholar]
- Hagberg, M. Clinical assessment of musculoskeletal disorders in workers exposed to hand-arm vibration. Int. Arch. Occup. Environ. Health 2022, 75, 97–105. [Google Scholar] [CrossRef] [PubMed]
- Clemm, T.; Lunde, L.-K.; Ulvestad, B.; Faerden, K.; Nordby, K.-C. Exposure-response relationship between hand-arm vibration exposure and vibrotactile thresholds among rock drill operators: A 4-year cohort study. J. Occup. Environ. Med. 2022, 79, 775–781. [Google Scholar] [CrossRef]
- Reynolds, D.D.; Basel, R.; Wassermann, D.E.; Taylor, W. A study of hand vibration on chipping and grinding operators, part I: Vibration acceleration levels measured on pneumatic tools used in chipping and grinding operations. J. Sound Vib. 1984, 95, 479–497. [Google Scholar] [CrossRef]
- Griffin, M.J. Evaluating the effectiveness of gloves in reducing the hazards of hand-transmitted vibration. Occup. Environ. Med. 1998, 55, 340–348. [Google Scholar] [CrossRef]
- Alfaro Degan, G.; Antonucci, A.; Coltrinari, G.; Lippiello, D. Problems related to measuring the transmissibility of antivibration gloves: Possible efficacy for impact tools used in mining and quarrying activities. Int. J. Occup. Saf. Ergon. 2023, 29, 704–716. [Google Scholar] [CrossRef]
- Dong, R.G.; Welcome, D.E.; Peterson, D.R.; Xu, X.S.; McDowell, T.W.; Warren, C.; Asaki, T.; Kudernatsch, S.; Brammer, A. Tool-specific performance on vibration-reducing gloves for attenuating palm-transmitted vibrations in three orthogonal directions. Int. J. Ind. Ergon. 2014, 44, 827–839. [Google Scholar] [CrossRef]
- ISO 10819: 2013; Mechanical Vibration and Shock—Hand Arm Vibration—Method for Measurement and Evaluation of the Vibration Transmissibility of Gloves at the Palm of the Hand. International Standards Organization: Geneva, Switzerland, 2013.
- Dong, R.G.; McDowell, T.W.; Welcome, D.; Barkley, J.; Warren, C.; Washington, B. Effects of hand-tool coupling conditions on the isolation effectiveness of air bladder anti-vibration gloves. J. Low Freq. Noise Vib. Act. Control. 2004, 23, 231–248. [Google Scholar] [CrossRef]
- Hewitt, S.; Dong, R.G.; Welcome, D.E.; McDowell, T.W. Anti-vibration gloves? Ann. Occup. Hyg. 2015, 59, 127–141. [Google Scholar]
- Pinto, I.; Stacchini, N.; Bovenzi, M.; Paddan, G.S.; Griffin, M.J. Protection effectiveness of antivibration gloves: Field evaluation and laboratory performance assessment. In Proceedings of the 9th International Conference on Hand-Arm Vibration, Nantes, France, 5–8 June 2001. [Google Scholar]
- McDowell, T.W.; Dong, R.G.; Welcome, D.E.; Xueyan, S.X.; Warren, C. Vibration-reducing gloves: Transmissibility at the palm of the hand in three orthogonal directions. Ergonomics 2013, 56, 1823–1840. [Google Scholar] [CrossRef] [PubMed]
- Dong, R.G.; McDowell, T.W.; Welcome, D.E.; Smutz, W.P.; Schopper, A.W.; Warren, C.; Wu, J.Z.; Rakheja, S. On-the-hand measurement methods for assessing effectiveness of anti-vibration gloves. Int. J. Ind. Ergon. 2003, 32, 283–298. [Google Scholar] [CrossRef]
- Laszlo, H.E.; Griffin, M.J. The transmission of vibration through gloves: Effects of push force, vibration magnitude and inter-subject variability. Ergonomics 2011, 54, 488–496. [Google Scholar] [CrossRef] [PubMed]
- Wells, R.; Hunt, S.; Hurley, K.; Rosati, P. Laboratory assessment of the effect of heavy rubber glove thickness and sizing on effort, performance and comfort. Int. J. Ind. Ergon. 2010, 40, 386–391. [Google Scholar] [CrossRef]
- Yao, Y.; Rakheja, S.; Gauvin, C.; Marcotte, P.; Hamouda, K. Evaluation of effects of anti-vibration gloves on manual dexterity. Ergonomics 2018, 61, 1530–1544. [Google Scholar] [CrossRef]
- Dong, R.G.; Welcome, D.E.; McDowell, T.W.; Rakheja, S. Estimation of the transmissibility of anti-vibration gloves when used with specific tools. Noise Vib. Worldw. 2005, 9, 11–20. [Google Scholar] [CrossRef]
- Antonucci, A.; Coltrinari, G.; Nataletti, P.; Di Giovanni, R.; Lippiello, D. 3-D printed palm adaptors for hand-arm vibration measures. Transmissibility properties, and misalignment reduction when used with gloves. WIT Trans. Built Environ. 2021, 206, 163–174. [Google Scholar]
- Hewitt, S. Triaxial Measurements of the Performance of Anti-Vibration Gloves, 1st ed.; Health and Safety Executive (HSE): Buxton, UK, 2010; pp. 1–54. [Google Scholar]
- Rakheja, S.; Dong, R.G.; Welcome, D.E.; Schopper, A.W. Estimation of tool-specific isolation performance of anti-vibration gloves. Int. J. Ind. Ergon. 2022, 30, 71–87. [Google Scholar] [CrossRef]
- Dong, R.G.; McDowell, T.W.; Welcome, D.E.; Rakheja, S.; Caporali, S.A.; Schopper, A.W. Effectiveness of a transfer function method for evaluating vibration isolation performance of gloves when used with chipping hammers. J. Low Freq. Noise Vib. Active Control. 2002, 21, 141–155. [Google Scholar] [CrossRef]
- Dong, R.G.; Wu, J.Z.; Xu, X.S.; Welcome, D.E.; Krajnak, K. A review of hand-vibration studies conducted by US NIOSH since 2000. Vibration 2021, 4, 482–528. [Google Scholar] [PubMed]
- Antonucci, A.; Coltrinari, G.; Lippiello, D. Effectiveness of antivibration gloves when used with a light electric hammer. Differences among different methods of measurements. Int. J. Comp. Meth. and Exp. Meas. 2023, 11, 27–34. [Google Scholar]
- Clemm, T.; Nordby, K.C.; Lunde, L.K.; Ulvestad, B.; Bratveit, M. Hand-arm vibration exposure in rock drill workers: A comparison between measurements with hand-attached and tool-attached accelerometers. Ann. Work. Expo. Health 2021, 65, 1123–1132. [Google Scholar] [CrossRef]
- Boileau, P.É.; Rakheja, S.; Boutin, J. An interlaboratory evaluation of the vibration transmissibility of gloves following the ISO 10819 test method. Can. Acoust. 2001, 29, 18–19. [Google Scholar]












Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).