
Retrofitting Agricultural Self-Propelled Machines with Roll-Over and Tip-Over Protective Structures



Abstract
1. Introduction
- Part 1 (principles), the criteria for risk assessment to determine the roll-over hazard and the protective measures to reduce the risk of roll-over considering the machine self-protective structure (SPS) (i.e., a part of the machinery that contributes operator protection absorbing roll-over energy and loads) as well as the roll-over protective structures (ROPS) and tip-over protective structures (TOPS) solutions.
- Part 2 (determination of static stability and test procedures), the methodology to calculate SPAM stability via the static overturning angle (SOA).
2. Safety Problems of Self-Propelled Machinery
- The driving of the machine is a ride-on operator type;
- The frame of the machine does not have the tractor structural configuration;
- The unladen mass is not less the 400 kg.
- The mass of the machine with closed full tanks, which can increase about 40–45% of the unladen mass;
- Several SPAM types (especially harvesters used in vineyards) are equipped with a manual or automatic self-leveling system that can improve the machine stability until to a 30% lateral slope;
- The distribution of the unladen/laden mass of the machine axes largely impacts the overturning occurrence.
3. Materials and Methods
- Detection of the machinery features;
- Loss of stability risk assessment;
- Protective structure design;
- Protective structure building and functional testing.
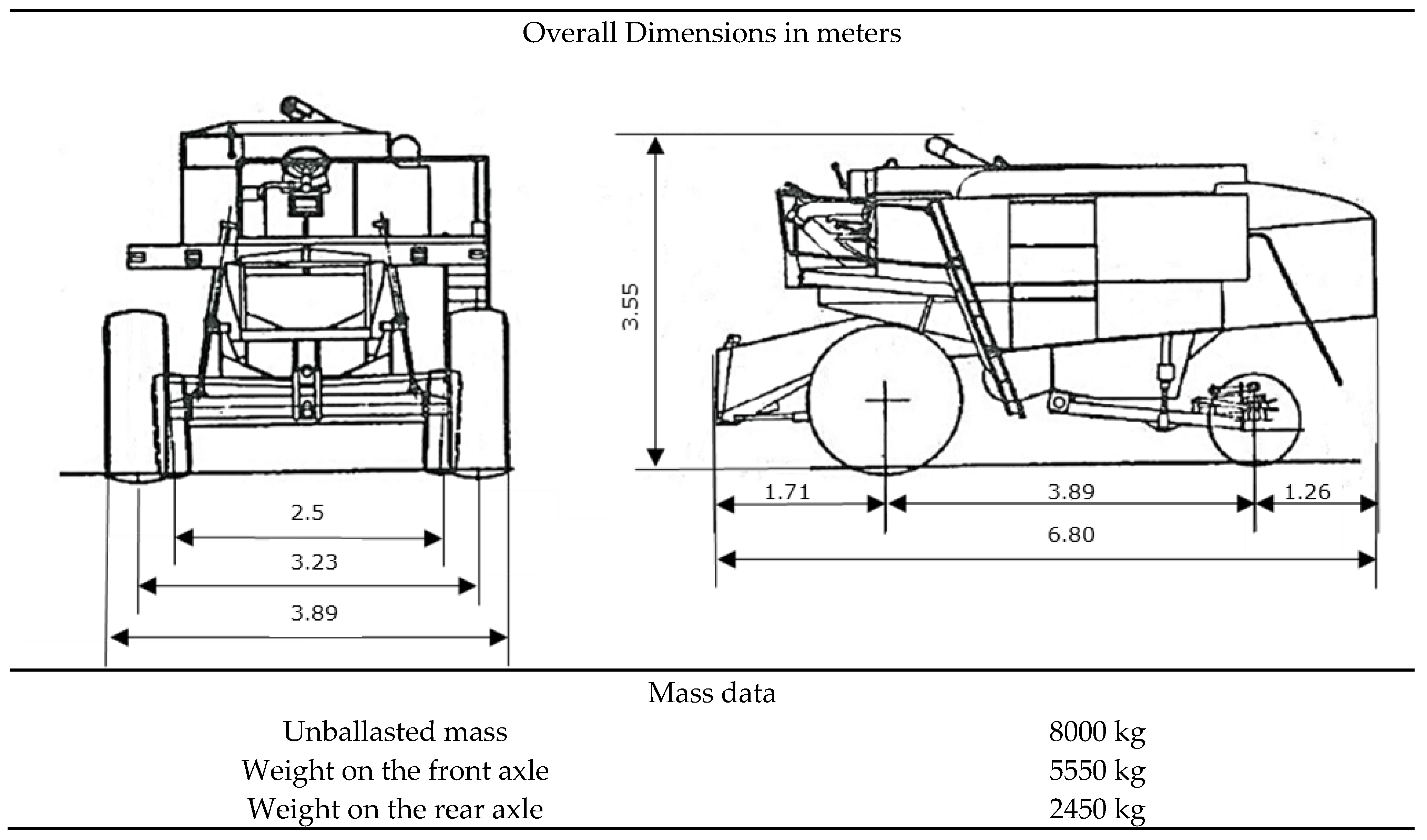
3.1. Detection of the Machinery Features
- Number of axles;
- Track;
- Wheelbase;
- Overall width;
- Adjustable height;
- Longitudinal position of the cab versus the center of gravity;
- Hard points as a component of the protective system;
- The machine is fitted with closed or open tanks;
- Maximum speed (range 0–16 km/h);
- Square contour of the SPAM (i.e., the wheelbase is roughly equivalent to the track width);
- Maximum operating slope (evaluation or estimation).
3.2. Loss of Stability Risk Assessment
- No loss of stability;
- Full roll-over;
- Tip-over.
3.3. Protective Structure Design
3.4. Protective Structure Building and Functional Testing
4. Case Studies
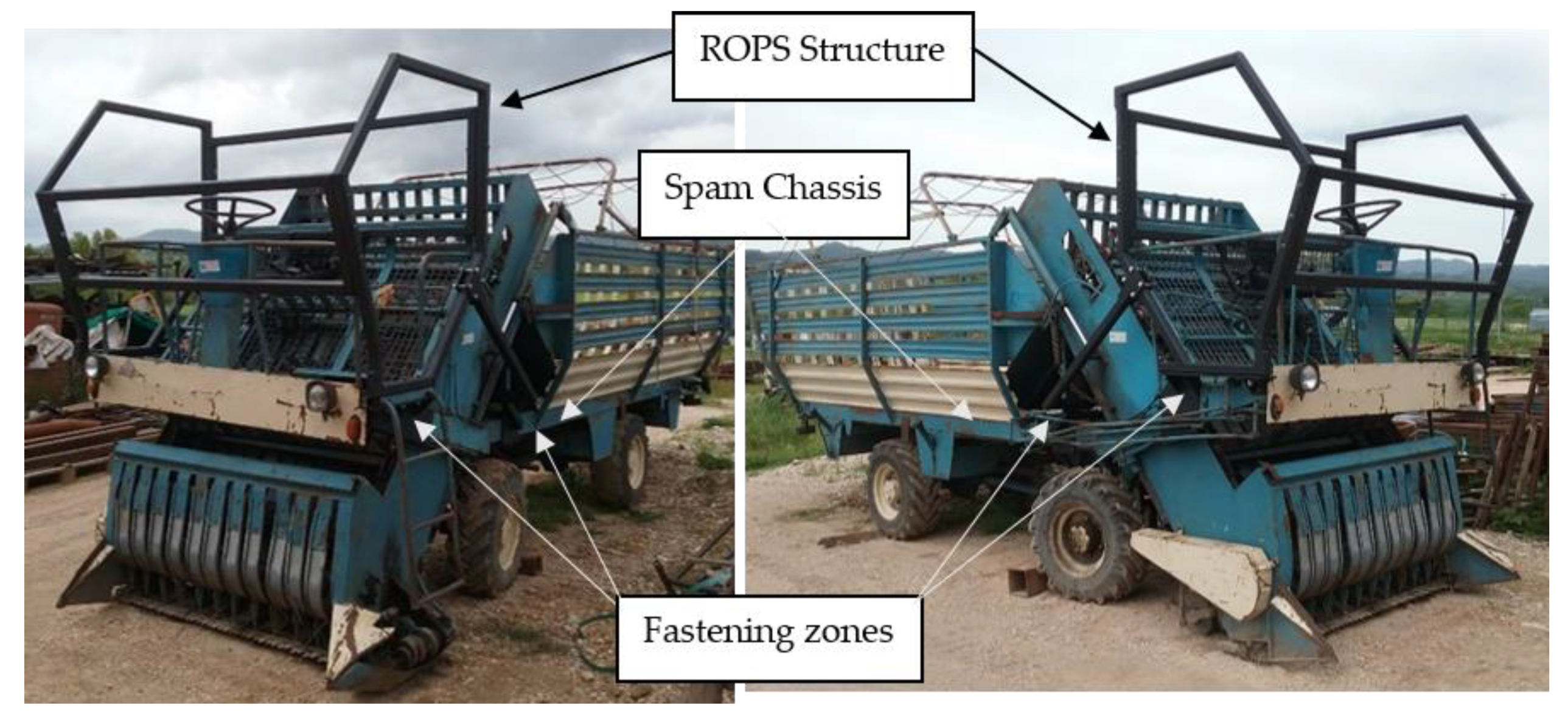
4.1. Self-Propelled Forage Harvester
4.1.1. Longitudinal Loading
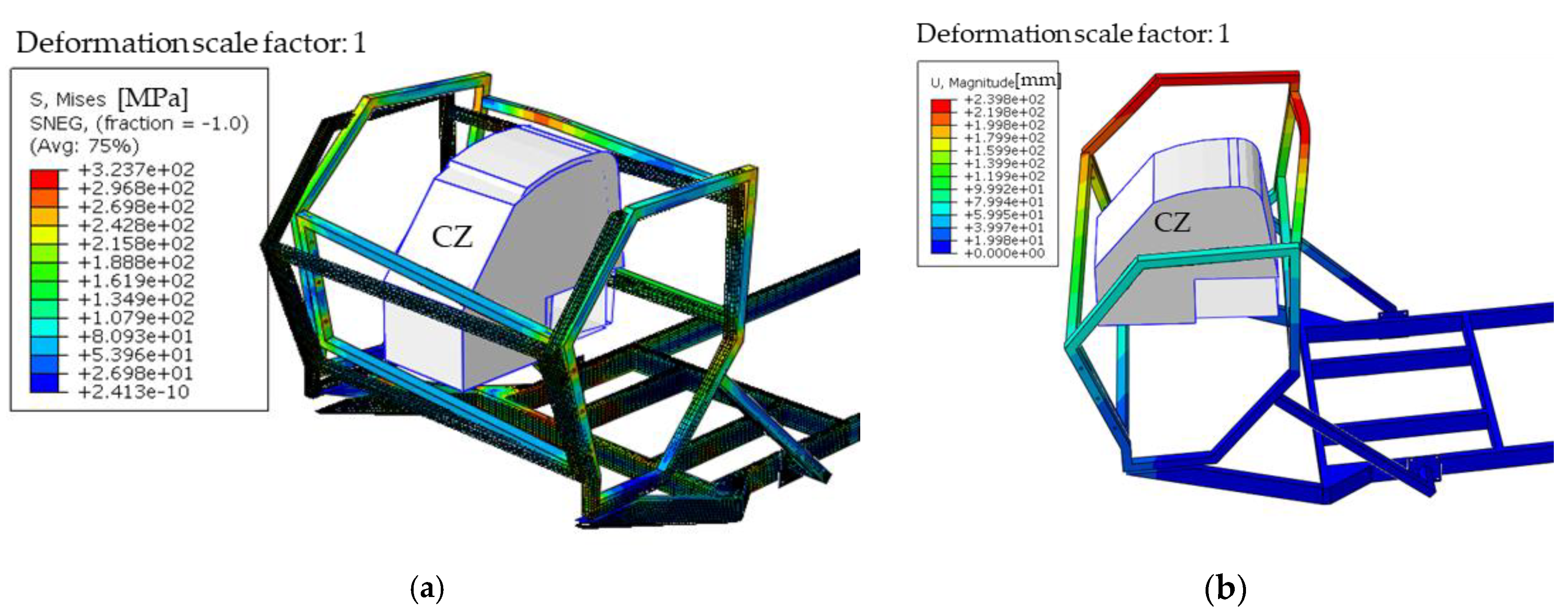
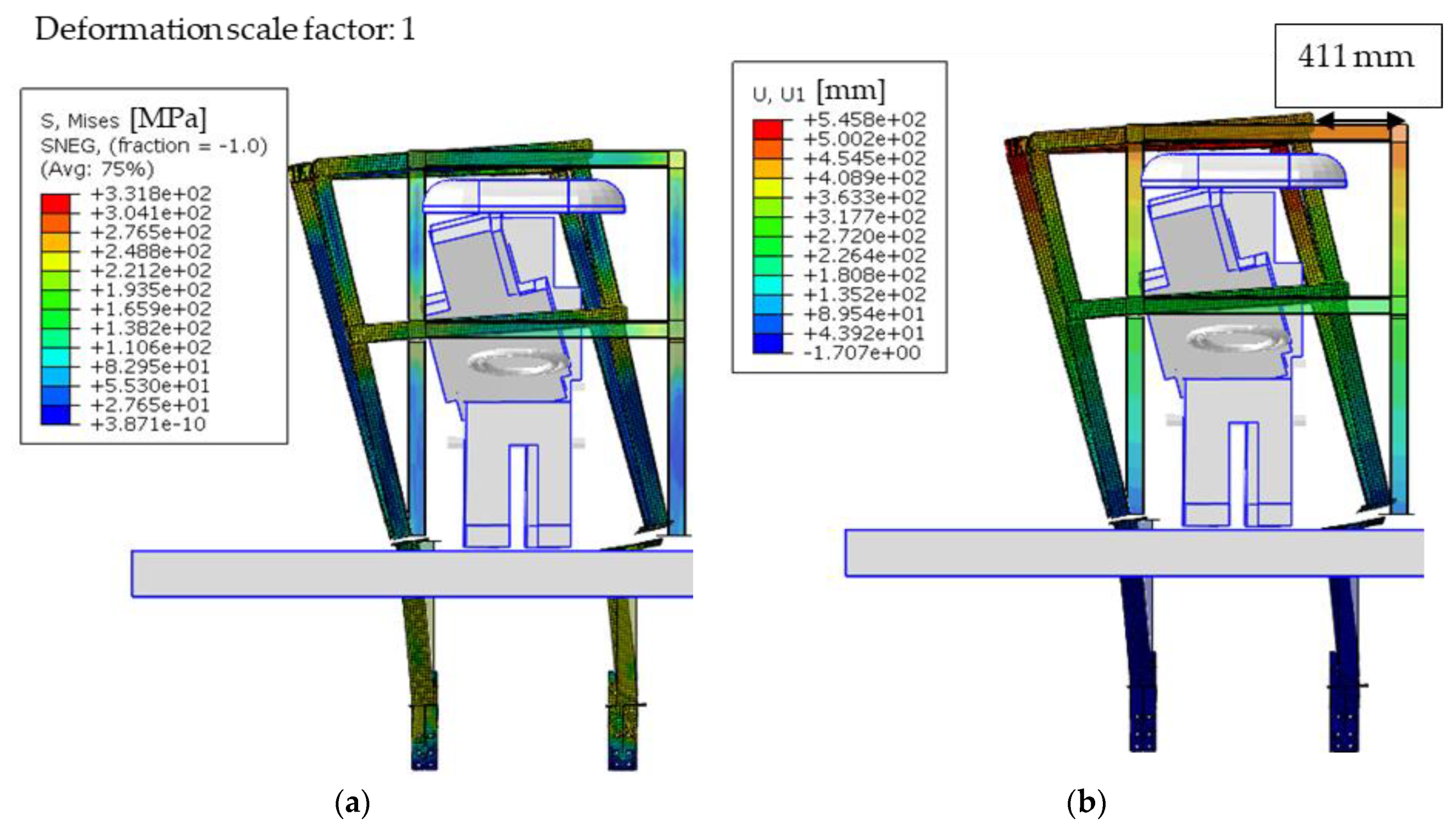
- The clearance zone (CZ) follows the structure deformation (see Figure 5a,b);
- The most high tension values are reached by the chassis of the SPAM forage harvester (see Figure 5a);
- The clearance zone is always protected. As represented in Figure 5, the clearance zone is never outside the ROPS (unprotected) and no parts of ROPS infringe the clearance zone;
- The maximum level of stress is under the ultimate stress limit of the material.
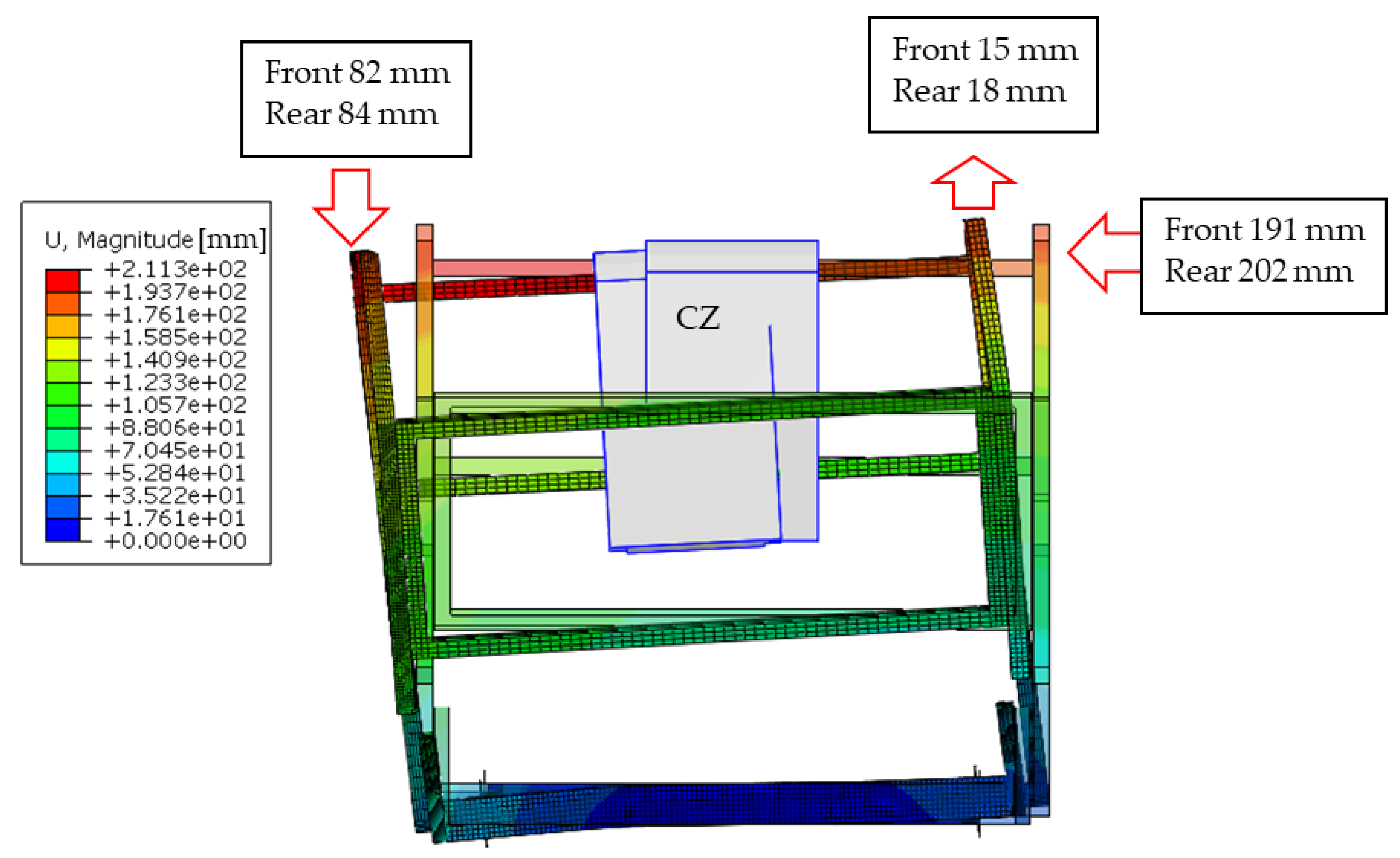
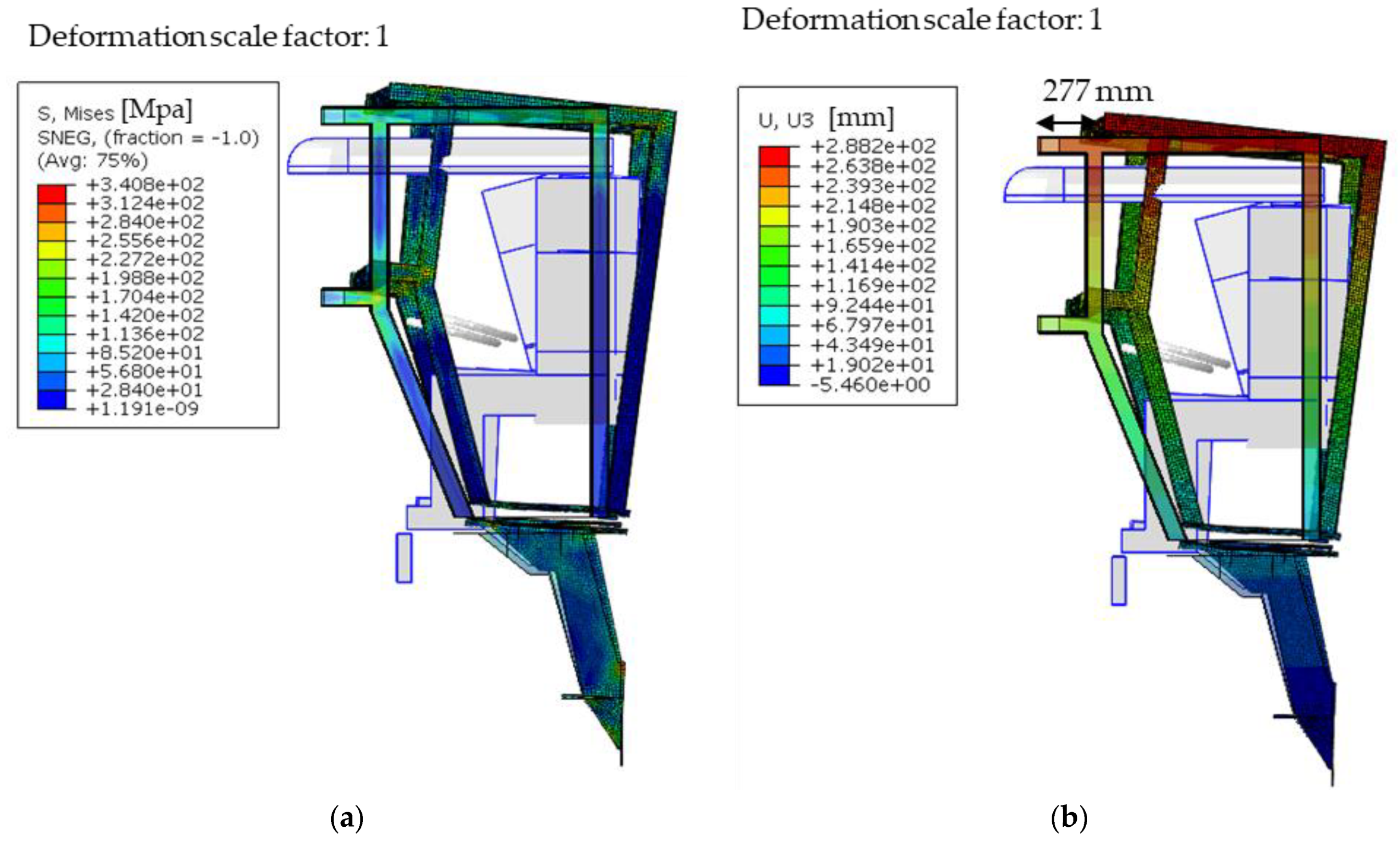
4.1.2. Side Loading
- The clearance zone is always protected (see Figure 6a,b) and no parts of ROPS infringe the clearance zone;
- The maximum level of stress is under the ultimate stress limit of the material (see Figure 6a);
- There is only a 28 mm difference between the lateral deflection of the clearance zone and the deformation of the structure where the force is applied: the driver’s seat follows the deformation of the structure almost completely so that the clearance zone is always protected.
4.1.3. Crushing
4.1.4. Permanent Deflection
4.1.5. Protective Structure Building and Functional Testing
4.2. Combine Harvester
4.2.1. Side Loading
- The deflection limiting volume is protected;
- The maximum level of stress is under the ultimate stress limit of the material (see Table 3).
4.2.2. Longitudinal Loading
4.2.3. Permanent Deflection
4.2.4. Protective Structure Building and Functional Testing
5. Discussion of Results and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Burgus, S.; Duysen, E. Identifying Topics and Dissemination Methods for Agricultural Safety and Health Messages. Safety 2017, 3, 3. [Google Scholar] [CrossRef]
- Jenkins, P.L.; Sorensen, J.A.; Yoder, A.; Myers, M.; Murphy, D.; Cook, G.; Wright, F.; Bayes, B.; May, J.J. Prominent barriers and motivators to installing ROPS: An analysis of survey responses from Pennsylvania and Vermont. J. Agric. Saf. Health 2012, 18, 103–112. [Google Scholar] [CrossRef]
- Chae, H.; Min, K.; Park, J.; Kim, K.; Kim, H.; Lee, K. Estimated rate of agricultural injury: The Korean farmers’ occupational disease and injury survey. Ann. Occup. Environ. Med. 2014, 26, 8. [Google Scholar] [CrossRef]
- Kumar, A.; Varghese, M.; Mohan, D. Equipment-related injuries in agriculture: An international perspective. Inj. Control Saf. Promot. 2000, 7, 175–186. [Google Scholar] [CrossRef]
- Cividino, S.R.S.; Pergher, G.; Zucchiatti, N.; Gubiani, R. Agricultural Health and Safety Survey in Friuli Venezia Giulia. Agriculture 2018, 8, 9. [Google Scholar] [CrossRef]
- Pessina, D.; Facchinetti, D. A survey on fatal accidents for overturning of agricultural tractors in Italy. Chem. Eng. Trans. 2017, 58, 79–84. [Google Scholar]
- Fargnoli, M.; Lombardi, M.; Haber, N.; Puri, D. The Impact of Human Error in the Use of Agricultural Tractors: A Case Study Research in Vineyard Cultivation in Italy. Agriculture 2018, 8, 82. [Google Scholar] [CrossRef]
- Keskin, S.G.; Keskin, M.; Soysal, Y. Assessing farm tractor incidents and awareness levels of operators for tractor safety issues in the Hatay province of Turkey. J. Agric. Saf. Health 2012, 18, 113–128. [Google Scholar] [CrossRef] [PubMed]
- Il Quadro Degli Infortuni-Elementi di Riflessione. Available online: http://www.dinamica-fp.com/images/dinamica/sicuragri/quadroinfortuni.html (accessed on 15 March 2021).
- Myers, M.L. Tractor risk abatement and control as a coherent strategy. J. Agric. Saf. Health 2002, 8, 185–198. [Google Scholar] [CrossRef] [PubMed][Green Version]
- Cecchini, M.; Monarca, D.; Laurendi, V.; Puri, D.; Cossio, F. Mechatronic Solutions for the Safety of Workers Involved in the Use of Manure Spreader. Agriculture 2017, 7, 95. [Google Scholar] [CrossRef]
- Mayrhofer, H.; Quendler, E.; Boxberger, J. Prevention aspects for avoiding run-over incidents with self-propelled agricultural machinery. CIGR J. 2014, 16, 148–156. [Google Scholar]
- Fargnoli, M.; Lombardi, M.; Haber, N. A fuzzy-QFD approach for the enhancement of work equipment safety: A case study in the agriculture sector. Int. J. Reliab. Saf. 2018, 12, 306–326. [Google Scholar] [CrossRef]
- Fargnoli, M.; Lombardi, M.; Puri, D. Applying Hierarchical Task Analysis to Depict Human Safety Errors during Pesticide Use in Vineyard Cultivation. Agriculture 2019, 9, 158. [Google Scholar] [CrossRef]
- Yoder, A.M.; Sorensen, J.A.; Foster, F.; Myers, M.; Murphy, D.; Cook, G.; May, J.; Jenkins, P. Selecting Target Populations for ROPS Retrofit Programs in Pennsylvania and Vermont. J. Agric. Saf. Health 2013, 19, 175–190. [Google Scholar] [PubMed]
- Fargnoli, M.; Laurendi, V.; Tronci, M. Design for Safety in Agricultural Machinery. In DS 60, Proceedings of the DESIGN 2010, the 11th International Design Conference, Dubrovnik, Croatia, 17–20 May 2010; Marjanovic, D., Storga, M., Pavkovic, N., Bojcetic, N., Eds.; International Design Conference: Dubrovnik, Croatia, 2010; pp. 701–710. ISBN 978-953-7738-03-7. [Google Scholar]
- Fargnoli, M.; Vita, L.; Gattamelata, D.; Laurendi, V.; Tronci, M. A Reverse Engineering Approach to Enhance Machinery Design for Safety. In DS 70, Proceedings of the DESIGN 2012, the 12th International Design Conference, Dubrovnik, Croatia, 21–24 May 2012; Marjanovic, D., Storga, M., Pavkovic, N., Bojcetic, N., Eds.; International Design Conference: Dubrovnik, Croatia, 2012; pp. 627–636. ISBN 978-953-7738-17-4. [Google Scholar]
- Pessina, D.; Facchinetti, D.; Giordano, D.M. Narrow-track agricultural tractors: A survey on the load of the hand-operated foldable rollbar. J. Agric. Saf. Health 2016, 22, 275–284. [Google Scholar]
- Italian Workers Compensantion Authority (INAIL) Guidelines for ROPS Retrofitting on Old Agricultural Tractors. Available online: https://www.inail.it/cs/internet/comunicazione/pubblicazioni/catalogo-generale/linstallazione-dei-dispositivi-di-protezione.html (accessed on 28 February 2021).
- International Organization for Standardization (ISO). ISO 16231-1:2013-Self-Propelled Agricultural Machinery—Assessment of stability—Part 1: Principles. Available online: https://www.iso.org/standard/55941.html (accessed on 1 March 2021).
- International Organization for Standardization (ISO). ISO 16231-2:2015-Self-Propelled Agricultural Machinery-Assessment of Stability-Part 2: Determination of Static Stability and Test Procedures. Available online: https://www.iso.org/standard/61583.html (accessed on 1 March 2021).
- OECD Standards Code 4, 6, 7, 8 for the Official Testing of Roll-over Protective Structures on Agricultural and Forestry Tractors, Organisation for the Economic Co-Operation and Development Paris, France. Available online: https://www.oecd.org/agriculture/tractors/codes/ (accessed on 28 February 2021).
- Capacci, E.; Rondelli, V. Evaluation of Testing Procedures for ROPS Fitted on Self-propelled Agricultural Machinery. In Proceedings of the International Conference Work Safety and Risk Prevention in Agro-Food and Forest Systems, Ragusa SHWA 2010, Ragusa, Italy, 16–18 September 2010; pp. 202–209. [Google Scholar]
- Pessina, D.; Facchinetti, D.; Giordano, D. The Driver’s Protection in Case of Self-Propelled Machinery Roll-Over. Contemp. Eng. Sci. 2015, 8, 1127–1140. [Google Scholar] [CrossRef][Green Version]
- Capacci, E.; Franceschetti, B.; Ciuffoli, A.; Rondelli, V. The stability of self-propelled sprayers according to the ISO 16231 standardized procedure. Chem. Eng. Trans. 2017, 58, 61–66. [Google Scholar]
- Gattamelata, D.; Laurendi, V.; Vita, L.; Fargnoli, M.; Pirozzi, M. Roll-Over Risk Analysis for Agricultural Self-Propelled Ride-On Machines. In Proceedings of the International Conference RAGUSA SHWA, Ragusa, Italy, 3–6 September 2012; Volume 4. [Google Scholar]
- OECD Document TAD/CA/T/WD(2012)7, Report from the Sub-Working Group (SWG) on the Extension of ROPS to other Agricultural Machinery. In Proceedings of the OECD, Organisation for the Economic Co-Operation and Development, Paris, France, 9–30 May 2013.
- Mayrhofer, H.; Quendler, E.; Boxberger, J. Narrative text analysis of accident reports with tractors, self-propelled harvesting machinery and materials handling machinery in Austrian agriculture from 2008 to 2010-a comparison. Ann. Agric. Environ. Med. 2014, 21, 183–188. [Google Scholar] [PubMed]
- Al-Bassit, L.; Tricot, N.; Sayegh, S. Falling-object protective structure for tractors in service: Prototype design and validation. Biosyst. Eng. 2019, 185, 76–87. [Google Scholar] [CrossRef]
- Rondelli, V.; Casazza, C.; Martelli, R. Tractor rollover fatalities, analyzing accident scenario. J. Saf. Res. 2018, 67, 99–106. [Google Scholar] [CrossRef]
- Fargnoli, M.; Lombardi, M.; Haber, N.; Guadagno, F. Hazard function deployment: A QFD-based tool for the assessment of working tasks—A practical study in the construction industry. Int. J. Occup. Saf. Ergon. 2020, 26, 348–369. [Google Scholar] [CrossRef] [PubMed]
- Karlinski, J.; Rusinski, E.; Smolnicki, T. Protective structures for construction and mining machine operator. Autom. Constr. 2008, 17, 232–244. [Google Scholar] [CrossRef]
- Derlukiewicz, D.; Karlinski, J.; IIuk, A. The operator protective structures testing for mining machines. Solid State Phenom. 2010, 165, 256–261. [Google Scholar] [CrossRef]
- Afeez, A.; Kumar, A. Application of CAD and reverse engineering methodology for development of complex assemblies. J. Eng. Des. Technol. 2013, 11, 375–390. [Google Scholar] [CrossRef]
- Karlinski, J.; Ptak, M.; Działak, P. Simulation tests of roll-over protection structure. Arch. Civil Mech. Eng. 2013, 13, 57–63. [Google Scholar] [CrossRef]
- Wang, X.; Ayers, P.; Womac, A.R. Static simulation and analyses of mower’s ROPS behavior in a finite element model. J. Agric. Saf. Health 2009, 15, 335–351. [Google Scholar] [CrossRef] [PubMed]
- Italian Workers Compensation Authority (INAIL) Guidelines for ROPS Retrofitting on Old Agricultural Carrying Tractors. Available online: https://www.inail.it/cs/internet/attivita/prevenzione-e-sicurezza/promozione-e-cultura-della-prevenzione/linee-guida/ucm_portstg_077603_dispositivi-di-protezione-del-conducente.html (accessed on 8 February 2021).
- Mechanical Properties of Materials. Available online: https://mechanicalc.com/reference/mechanical-properties-of-materials#ramberg-osgood-equation, (accessed on 25 March 2021).
- International Organization for Standardization (ISO). ISO 12117-2:2008-Earth-Moving Machinery—Laboratory Tests and Performance Requirements for Protective Structures of Excavators—Part 2: Roll-Over Protective Structures (ROPS) for Excavators of over 6 t. Available online: https://www.iso.org/standard/43160.html (accessed on 1 March 2021).
- Harris, J.R.; McKenzie, E.A.; Etherton, J.R.; Cantis, D.M.; Ronaghi, M. ROPS performance during field upset and static testing. J. Agric. Saf. Health 2010, 16, 5–18. [Google Scholar] [CrossRef] [PubMed]
- Franceschetti, B.; Rondelli, V.; Ciuffoli, A. Comparing the influence of roll-over protective structure type on tractor lateral stability. Saf. Sci. 2019, 115, 42–50. [Google Scholar] [CrossRef]
- Fargnoli, M.; Lombardi, M. Safety Vision of Agricultural Tractors: An Engineering Perspective Based on Recent Studies (2009–2019). Safety 2020, 6, 1. [Google Scholar] [CrossRef]
- Hard, D.L.; Myers, J.R. Adoption of rollover protective structures (ROPS) on US farm tractors by state: 1993–1995, 2001, and 2004. J. Agric. Saf. Health 2011, 17, 157–172. [Google Scholar] [CrossRef]
- Hard, D.L.; McKenzie, E.A.; Cantis, D.; May, J.; Sorensen, J.; Bayes, B.; Madden, E.; Wyckoff, S.; Stone, B.; Maass, J. A demonstration project in New York and Virginia: Retrofitting cost-effective roll-over protective structures (CROPS) on tractors. J. Agric. Saf. Health 2015, 21, 173–185. [Google Scholar] [CrossRef] [PubMed]
- Urbanic, R.J.; ElMaraghy, W. A design recovery framework for mechanical components. J. Eng. Des. 2009, 20, 195–215. [Google Scholar] [CrossRef]
- Casazza, C.; Martelli, R.; Rondelli, V. Evaluation of a commercial tractor safety monitoring system using a reverse engineering procedure. J. Agric. Saf. Health 2016, 22, 215–225. [Google Scholar] [PubMed]
- Caffaro, F.; Micheletti Cremasco, M.; Roccato, M.; Cavallo, E. It does not occur by chance: A mediation model of the influence of workers’ characteristics, work environment factors, and near misses on agricultural machinery-related accidents. Int. J. Occup. Environ. Health 2017, 23, 52–59. [Google Scholar] [CrossRef] [PubMed]
- Kogler, R.; Quendler, E.; Boxberger, J. Occupational accidents with agricultural machinery in Austria. J. Agromed. 2016, 21, 61–70. [Google Scholar] [CrossRef] [PubMed]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Phase | Activities | Tools | Output |
|---|---|---|---|
| Detection of the machinery features | Detect the most relevant features with respect the loss of stability accidents: − machine inertial characteristics − machine main dimensions − presence of open or closed tanks − propulsion elements type − chassis topology | Weight scale; Gauge equipment | Machine data; Machine topology |
| Loss of stability risk assessment | Preliminary loss of stability hazard analysis according to the ISO 16231 standard calculation. Roll-over accidents data examination. | Standards ISO and OECD Codes | Define the protective structure type (ROPS/TOPS). Define the proper standard to test the protective structure. |
| Protective structure design | Analysis of the attachments on machine chassis. Reverse engineering of the anchorage points and potentially interfering elements. Machine virtual mockup. Protective structure virtual prototyping.Feasibility analysis of the protective structure. Structural validation. | CAE tools: CAD software (Solidworks); F.E.M. analysis software (Abaqus) | Protective structure virtual prototype; Workshop drawings. |
| Protective structure building and functional testing | Manufacturing of the protective structure. Protective structure fitting on SPAM. Test on the field. | Workshop tools; Carpentry material and fastenings; Protective structure evaluation on field | Valid protective structure. |
| Loading Sequence | Required Energy and Force | SPAM Tested |
|---|---|---|
| Longitudinal loading | 1.4 M = 3920 J | Applied force: on the front, right side Force = 23,746 N Energy = 4000 J |
| First crushing test | 20 M = 56,000 N | At rear 56,500 N |
| Side loading | 1.75 M = 4900 J | Applied force: on the left Force = 22,310 N Energy = 5136 J |
| Second crushing test | 20 M = 56,000 N | At the front 56,700 N |
| Property | Value | |
|---|---|---|
| Young’s Modulus | 210,000 MPa | |
| Poisson’s Ratio | 0.3 | |
| Plastic Behavior | Yield Stress [MPa] | Plastic Strain |
| 275 | 0 | |
| 290 | 0.0091 | |
| 330 | 0.0344 | |
| 360 | 0.1142 | |
| 370 | 0.2389 | |
| 430 | 0.7989 | |
| SOA (deg) | |||
|---|---|---|---|
| 0 | 0 | ||
| 0 | 56.014 | 0 | 78.514 |
| 1 | 53.858 | 1 | 76.358 |
| 2 | 51.814 | 2 | 74.314 |
| 3 | 49.879 | 3 | 72.379 |
| 4 | 48.048 | 4 | 70.548 |
| 5 | 45.487 | 5 | 67.987 |
| 6 | 43.132 | 6 | 65.632 |
| 7 | 40.968 | 7 | 63.468 |
| 8 | 38.976 | 8 | 61.476 |
| 9 | 37.142 | 9 | 59.642 |
| Loading Sequence | Required Energy | Achieved Energy | Applied Force |
|---|---|---|---|
| Side loading | 9835 J | 11,720 J | 29,580 N |
| Longitudinal loading | 3254 J | 3872 J | 17,700 N |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vita, L.; Gattamelata, D.; Pessina, D. Retrofitting Agricultural Self-Propelled Machines with Roll-Over and Tip-Over Protective Structures. Safety 2021, 7, 46. https://doi.org/10.3390/safety7020046
Vita L, Gattamelata D, Pessina D. Retrofitting Agricultural Self-Propelled Machines with Roll-Over and Tip-Over Protective Structures. Safety. 2021; 7(2):46. https://doi.org/10.3390/safety7020046
Chicago/Turabian StyleVita, Leonardo, Davide Gattamelata, and Domenico Pessina. 2021. "Retrofitting Agricultural Self-Propelled Machines with Roll-Over and Tip-Over Protective Structures" Safety 7, no. 2: 46. https://doi.org/10.3390/safety7020046
APA StyleVita, L., Gattamelata, D., & Pessina, D. (2021). Retrofitting Agricultural Self-Propelled Machines with Roll-Over and Tip-Over Protective Structures. Safety, 7(2), 46. https://doi.org/10.3390/safety7020046