1. Introduction
Numerous innovative technologies with various purposes, i.e., entertainment, navigational, communication, and safety, are available to the drivers. Many of them come integrated into vehicles, while some are portable and wearable, including smart phones, tablets, music players, wireless, and smart headphones. Utilizing them may be beneficial in general, but multi-tasking while driving has been shown to impair driving performances, including reaction time, lateral lane position, and vision [
1], leading to reduced control of the wheel, lane keeping, speed, attention, following distance, hazard situation awareness, and tactical skills. Among these digital distractions, texting while driving has been reported to have the most negative impact on driving performance because it involves all three types of distractions: cognitive, manual, and visual, [
2,
3] although it does not cause the same level of distractions in all people [
4]. With more frequent and longer glances off-the-road as well as at least one-hand off the wheel, texting while driving has the greatest probability of leading to an accident [
5]. The National Highway Traffic Safety Administration reported that 14 percent of all fatal distraction-affected crashes involved cell phone use and texting while driving [
6]. This concern particularly applies to young and inexperienced drivers (generally defined in this context as novices) because texting while driving is widespread among high school and college students ranging between 15–24 year-olds in age, over 70% of whom text while driving [
2,
7,
8].
1.1. Theory and Previous Efforts
In an attempt to address this serious problem, Hazard Warning Systems (HWSs) have been researched as an emerging technology to reduce distracted driving and improve driving safety. They are designed to detect surrounding potential hazards and warn the drivers of imminent potential hazards so the driver can take necessary actions to avoid a possible collision. Different types of HWSs explored include visual, tactile, and auditory warning systems. Although all three types of HWSs resulted in a faster break reaction time (BRT), a smaller lane deviation (LD), and a higher maximum deceleration (MD) than no warning at all, auditory HWSs were reported to be more effective in BRT, LD, and MD than both visual and tactile HWSs [
9]. Among different types of auditory HWSs, beep-based auditory HWSs resulted in a shorter perception–reaction time, more reduced speed, and less position deviation than speech-based warning [
3]. The optimal timing to trigger an auditory warning was reported to be early warnings (app. 3–5 s before a potential hazard), which reduced the number of collisions caused by distracted drivers by 80.7%, and late warnings (app. 0–2 s prior to a hazard), which reduced the collisions by 50%, both of which are as compared to no-warning at all [
10].
Participants in these prior studies investigating the effect of HWSs on improving driving safety were experienced older drivers [
3,
9,
10]. However, novice drivers were reported to be engaged in texting while driving more frequently and longer than experienced older drivers. For example, [
11] reported that 61 percent of young adult drivers (ages 18–29), as compared to 36 percent for all drivers, texted while driving. Forty-five percent of high school students (aged ≥ 16) [
12], 90 percent of 4967 of young drivers (aged averaged at 21.8) [
13], and 74.3 percent of college students [
7] have been reported to be engaged in texting while driving.
Parallel to their texting behavior while driving, novices, as compared to experienced older drivers, are disproportionately involved in all car crashes [
14]. For example, sixteen-year-old drivers are involved in 10.3 fatal crashes per km million vehicle miles, a rate almost double that of 18-year-olds and almost eight times that of 45 to 64-year-olds, who are the safest group of drivers [
15,
16]. Sending or receiving text messages were reported to increase the risk of crashes or near-crashes by 3.87 among novice drivers [
17].
Prior research studies investigated the effects of HWSs on driving performance in terms of break reaction time (BRT), lane-deviation (LD), and maximum deceleration (MD), but none examined the effects on hazard perception skills as measured by hazard reaction time (HRT) and horizontal scanning (HS), although it is paramount to investigate the effects on novice drivers’ hazard perception skills because research showed that novices as compared to experienced older drivers do not have sufficient hazard perception skills. Specifically, novices are less sensitive to potential hazards [
15,
18,
19], detect hazards less quickly and less efficiently [
20], are slower to respond to potential hazards [
21], have narrower horizontal visual scanning [
22], which causes them to scan a restricted area close to the front of their vehicle, [
23] fixate on fewer and more stationary objects, fixate for longer periods of time inside the vehicle, and are less likely to glance at those areas of the driving scene that are defined as potentially hazardous [
14]. In addition, one of the most critical skills related to accident avoidance by a novice is hazard perception [
24] described as detection, recognition, and reaction to potentially dangerous events on the road. Of all the different components of driving skills, only hazard perception has been found to relate to accident involvement across a number of studies [
25].
Previous research studies utilized industrialized driving simulators with vehicle cockpit, and inside vehicle body components, including the brake pedal, throttle, steering wheel, and gear, all of which are identical to a real vehicle. These driving simulators provides a realistic reproduction of driving environments so that the behavior of drivers immersed in such systems is representative of what can be expected on the road [
10]. Moreover, they can record much more complex behavioral responses, including preparatory behaviors (slowing in anticipation of a hazard, changing lane position to avoid a potential hazard), emergency maneuvers to avoid the actual hazard [
22], and drivers’ eye fixations and scanning. However, these industrialized driving simulators may not be feasible or affordable to be used to test and train a large number of novice driver population. A game-based, multi-player, online simulation training (GMOST) application was designed and developed [
26] as an alternative, affordable, accessible, and practical application to the industrialized driving simulators. The GMOST’s online feature makes it accessible, its game-based feature makes it attractive, and its multi-player capability enables unpredictable driver behavior due to interactions with other players within the simulation. But, none of the prior research studies investigated HWSs within a game-based, multi-player, online simulation training (GMOST) application.
1.2. The Purpose
The first purpose of this study is to showcase the GMOST application with an integrated HWS as well as a messaging system (MS). The second purpose is to measure the effectiveness of HWSs on improving distracted novice drivers’ hazard perception skills, specifically on detecting and responding to hazards as measured by hazard reaction time (HRT) and scanning the roads for potential hazards as measured by horizontal scanning (HS).
2. Materials and Methods
This research complied with the tenets of the Declaration of Helsinki and was approved by the Institutional Review Board (Protocol #188-17). Informed consent was obtained from each participant.
2.1. GMOST
The GMOST simulation was initially developed in-house specifically for a research study to measure the effectiveness of the simulation on young drivers’ hazard perception skills, specifically on their ability to detect and respond to hazards as well as scanning the roads for potential hazards [
26]. It is designed based on a 5000 by 5000 m area map depicting a real-time road environment containing various traffic signs, traffic lights, houses, office buildings, playgrounds, hospitals, stadiums, trees, etc. The 3D models for these objects were downloaded from TurboSquid.com and archive3d.net. The GMOST was developed for the 8 most commonly occurring hazards created by 31 artificially intelligent vehicles (AIs) that were developed and implemented into the GMOST. AIs are placed in driveways, road shoulders, parking lots, and different positions in the map and are triggered when a player vehicle (PV) approaches a particular spot.
Table 1 below lists the hazards and AIs that create the hazards.
In addition to these 31 AIs, there are 26 dumb vehicles (DV) generating random traffic by randomly cruising around obeying the traffic rules. PVs (see
Figure 1) give participants full control of the PVs. It features a dashboard showing the speedometer and left/right turn signal indicators. To the right of the dashboard is the navigational display showing the current direction and the street the vehicle is on. Slightly below the rearview mirror is a yellow arrow pointing to the direction of the mission target without specifying turns or roads to be taken. The GMOST was developed based on a total of six missions that requests participants to ride the PVs from one target on the map to another. Players pick the mission to complete, and each mission takes about 5 min to complete.
2.2. Hazard Warning System (HWS)
A hazard warning system (HWS) is developed and integrated into the GMOST. HWS is composed of four sound bursts, each burst containing four pulses, and lasts approximately 2.25 s. Bursts are separated by approximately 10 ms. The sound level of the warning tone alone is 74 dBa. A warning is triggered 2 s before each one of the 8 hazards.
2.3. Messaging System (MS)
A simulated MS is created and integrated into the GMOST. Distractive messages were sent to the player through the MS, and their responses were received by it and recorded for analysis. The MS consists of 200 × 400 pixels screen located on the bottom right corner of the front-view, below the windshield. A ‘SEND’ and a ‘CANCEL’ button appear on the bottom-right corner of the MS after the player starts typing a response (see
Figure 2). A total of 20 distractive messages (DM) inquiring responses were developed, and digitally stored. The system is designed to send one of these randomly selected messages 4s before each one of the 8 potential hazards. The driver is expected to construct a response to each message and submit it by clicking the ‘SEND’.
2.4. Missions
A total of six missions were created on the GMOST. These missions were created to motivate participants to ride the PVs from one point on the map to another.
2.5. Participants and Treatment Conditions
Twenty-two high school students participated in this study. The participants ranged from 15 to 18 years old. They did not hold valid driver licenses, and they had normal visions. They were recruited from a local high school without an incentive for participating in the study. The participants were randomly divided into two groups. Participants in the experimental group were provided with the GMOST application with the HWS, and this group was labeled WHWS. Participants in the control group were provided with the GMOST application without the HWS and is labeled NHWS. The two groups are compared to examine the effects of HWSs on hazard perception skills in terms of hazard reaction time (HRT) and the horizontal eye-scanning of the road (HS). Therefore, this study is characterized as an experimental research design.
2.6. Procedures
A total of 11 pieces of eye-tracking equipment were installed into computers in a computer lab, where the experiment took place. The experiment took place in two concurrent sessions. NHWS group members participated in the first session and WHWS group members participated in the second. Participants’ eyes were calibrated for eye trackers and then each group completed six missions. At various positions on their routes, messaging distractions were triggered 4 s prior to the occurrence of hazards. The participants were expected to respond to these distractive messages on the MS at their own pace. The only difference between the two groups was that the WHWS group was provided with the HWS on GMOST while the NHWS group was not. The HWS triggered the voice-based warning sounds 2 s prior to hazards.
2.7. Data Source
The data source consisted of eye perception data, including hazard reaction time (HRT) and horizontal eye-scanning (HS). HRT and HS scores were analyzed for comparison between the two groups.
2.8. Hazard Reaction Time (HRT)
HRT was measured using a method by [
21]. Participants’ reactions to hazards were determined by detecting their key presses for breaking, speeding up, or swerving around before hazards to avoid collisions. During the experimentation, their screens were recorded, showing their key presses for breaking, speeding up, or swerving around in addition to displaying several other information. Playbacks of their performances to complete missions were later analyzed to code participants’ HRT scores. Their eye fixations were used to determine whether or not these key presses were indeed their responses to the hazardous situations. Their earliest responses to hazards were measured and converted into HRT scores in terms of frames (30 frames equal to 1 s). The HRT score for each participant was the mean response latency across all potential hazardous situations throughout six missions. The greater the mean latency score, the earlier the participant was able detect hazards. If a participant missed responding to a potential hazardous situation, the HRT for that event was eliminated from the calculation of the mean latency score (HRT). Participants completed the missions in the same order. Participants in WHWS were expected to have greater latency scores, indicating that they were able to react to potential hazards earlier than the ones in the NHWS group, who were expected to have smaller latency scores.
2.9. Horizontal Scanning (HS)
In addition to HRT, the participants’ eye movements were recorded to assess the effects of hazard warnings on participants’ horizontal eye scanning (HS) abilities. HS scores were measured by the same eye-tracking equipment and software. Using the same methods as [
23], the eye movements were analyzed across three periods of time: before a hazard (essentially a safe period), on approach to a hazard (when the source of the hazard might be visible though the hazard has not yet triggered), and during the hazard (the time window during which the hazard becomes apparent and the driver is required to react to the hazard). The distances between the fixations during these three periods of time were measured and calculated, and the mean of these distances was taken for all hazardous situations in all six missions. The HS score for each participant was the mean HS across all potential hazardous situations throughout the six missions. The high variance of HS indicated greater distances between eye fixations. Participants in NHWS were expected to look straight ahead, focusing on maintaining their lane position on the roads as compared to the ones in WHWS, who were expected to exhibit a high variance of fixation locations on the road, indicating that they were looking around them.
HRT and HS were the two dependent variables measured to calculate participants’ hazard perception skills. The scoring was done by the same raters and using the same rubric. The independent variables in this study were two groups: WHWS and NHWS. In this study, a 2 × 2 ANOVA and a 2 × 2 MANOVA were utilized to analyze the data.
2.10. Data Analysis
In an attempt to analyze the effect of HWSs on participants’ hazard perception skills, as measured by HRT and HS scores, this study requires an analysis of multivariance (MANOVA) because the experiment affects the two dependent variables separately and in combination with each other. In addition, the dependent variables share a common conceptual meaning (hazard perception) in different dimensions (HRT and HS), and it is possible to account for the interaction of the dependent variables with each other. The level of significance (alpha) was set at 0.05. Hotelling T2 was used to determine the overall multivariate significance of the dependent variables on the groups. Furthermore, to determine whether the HWS made any difference in participants’ HRT and HS scores separately, a 2 × 2 ANOVA was run with HRT and HS as dependent variables, and the two groups (WHWS and NHWS) as the independent variable. The purpose was to determine if the two groups were different in their HRT and HS scores separately. The SPSS Statistics software package was used for statistical analysis [
27].
3. Results
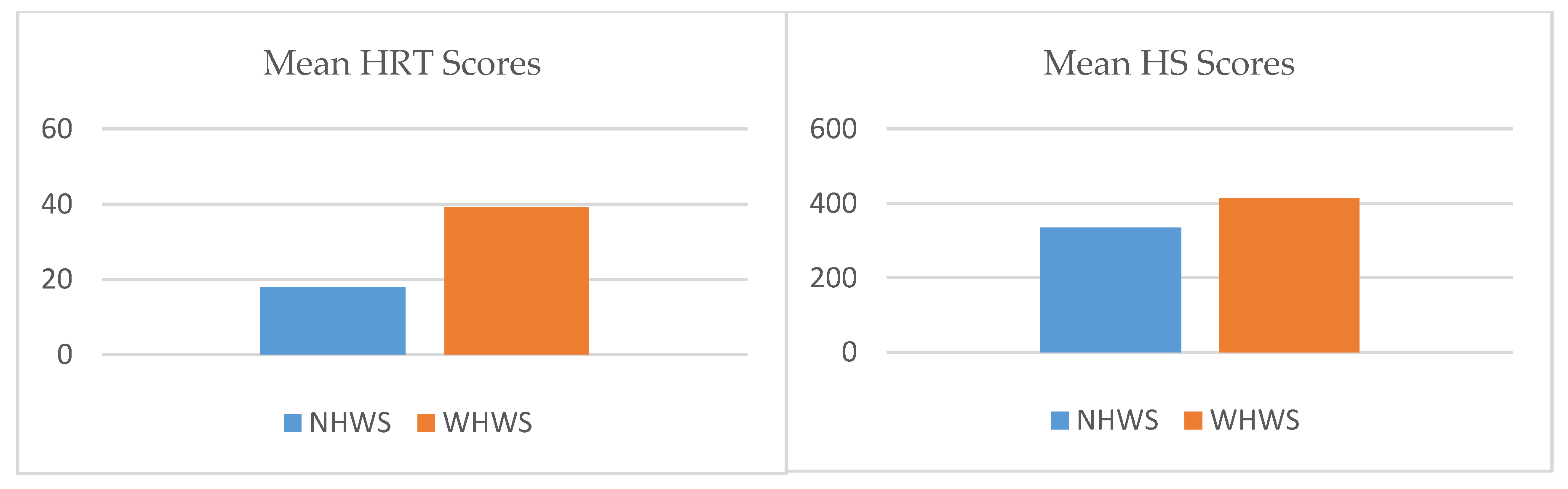
Table 2 shows the mean HRT and HS scores by all participants across the experimental (WHWS) and control (NHWS) groups. By looking at the table, we are able to determine the HRT and HS scores of participants while they complete the six missions. First, in terms of HRT, participants in the WHWS were 2.18 times earlier in reacting to the hazards than participants in the NHWS. Second, in terms of HS, participants in the WHWS had 1.23 times wider horizontal scanning than participants in the NHWS. This suggests that participants’ hazard reaction time and horizontal scanning scores have been improved by HWSs. The improvements in the participants’ HRT and HS scores due to the HWSs is visually illustrated in
Figure 3 below, showing the mean HRT and HS scores for both the NSWH and WHWS groups.
Shapiro–Wilk’s test (
p > 0.5) showed that HS scores for both the WHWH and NHWS groups, as well as the HRT scores for the WHWS group, were normally distributed, while the HRT scores for the NHWS group was not normally distributed (see
Table 3 below). Even though HRT data was found to be non-normal for the NHWS group, in terms of Type I error, ANOVA was a proper choice of test to analyze the data and report the results because the current study had equal groups sizes and equal variances of the dependent variable (HRT and HS) across groups (WHWS and NHWS), as shown by the non-significant Levene’s test result shown in
Table 4. Additionally, ANOVA was reported to be robust against the normality of assumption [
28] in 100% of the cases studied, regardless of design-balance and the homogeneity of variance [
29], when the sample size is equal [
30], and when the group variances are equal [
31].
Looking at the test of within-subjects effects (see
Table 5), the two-factor ANOVA showed a significant main effect on HRT, F(1, 20) = 0.000,
p < 0.05; partial eta squared = 0.6; power = 0.999, and HS scores F(1, 20) = 0.000,
p < 0.05; partial eta squared = 0.47; power = 0.981. Therefore, it can be concluded that GMOST has a statistically significant effect on HRT and HS scores.
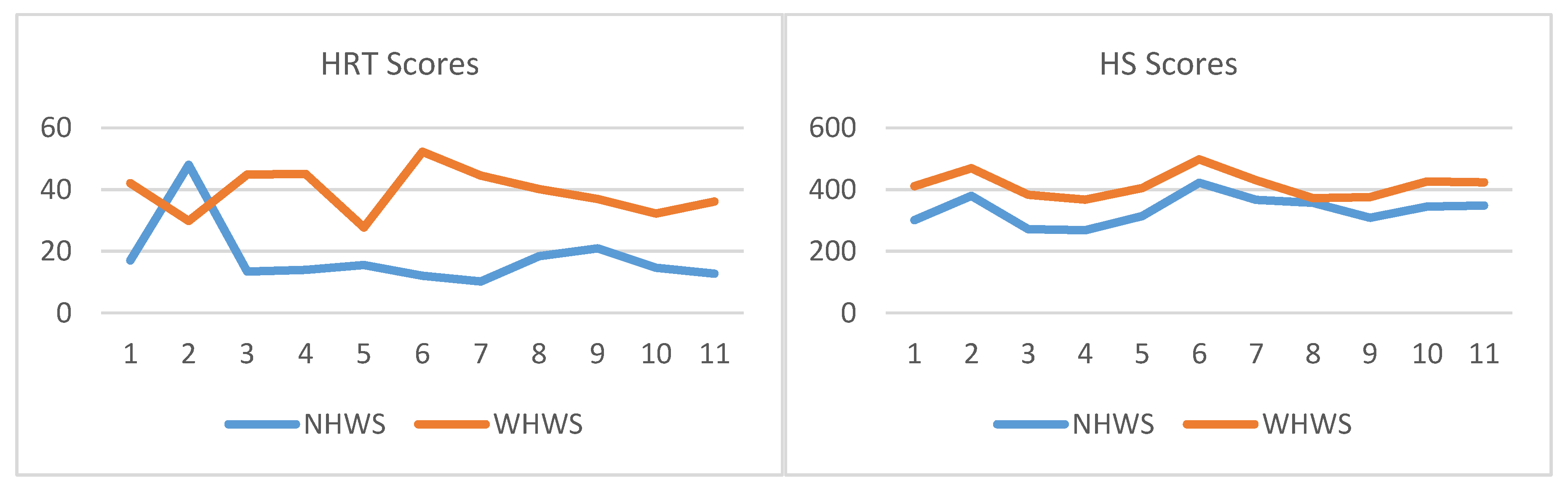
Figure 4 below shows the distribution of participants’ mean HRT and HS scores across all six missions and eight hazard types for both the NSWH and WHWS groups. As visually seen on the figure, and as proven by the two-factor ANOVA test, participants’ mean HRT and HS scores in the two groups were significantly different from each other on both dependent variables.
A 2 × 2 Multiple Analysis of Variance (MANOVA) was conducted to assess if there were differences between the two groups (WHWS and NHWS) on two hazard perception measures (HRT and HS) when considered together. HRT and HS are dependent variables and then the two groups (WHWS and NHWS) are independent variables. Box’s M statistics, as seen in
Table 6 below, was run to determine whether the covariance matrices for the WHWS and NHWS are equal. The non-significant test result, as seen in the table, indicated that the covariance matrices of HRT and HS as the dependent variables are equal across the two groups, WHWS and NHWS.
Looking at the multivariate test results (see
Table 7), we can conclude that HWSs make a statistically significant difference on participants’ HRT and HS combined scores (F (2, 19 = 0.000,
p < 0.05; Wilk’s Lambda = 0.323, partial eta squared = 0.677). Therefore, we can safely report that HWSs have a statistically significant effect on hazard perception skills, as measured by HRT and HS combined.
This study showed the plausibility of a game-based, multi-player, online, simulated training (GMOST) application with messaging and hazard warning systems as an affordable, accessible, and practical alternative application to industrial driving simulators both for training and research. GMOST with MS and HWS provided an attractive and practical environment to collect data and investigate driver behavior within a safe environment.
The results of this research study suggest that participants in the WHWS detected and reacted to hazards earlier than the ones in the NHWS group, and participants in the WHWS had a wider horizontal scanning than the ones in the NHWS. It is, therefore, logical to say that novice drivers have better hazard perception skills in terms of HRT and HS when an HWS is present compared to when they are not provided with an HWS. This indicates that HWSs help novice drivers improve their hazard perception skills.
The effect of HWSs in improving drivers’ hazard perceptions skills was also confirmed by prior studies in terms of a better break reaction time, less lane deviation, a higher maximum deceleration, and therefore a reduced number of collisions [
32,
33]. The results of this study are in line with the findings by [
10,
22], who reported that reaction time and driver responses were improved by early hazard warning. Additionally, the results of this study confirm the findings by [
34] in that a collision avoidance warning system results in enhanced reaction time and a smaller collision rate.
Additionally, the auditory type of hazard warning systems, similar to the one used in this study, as opposed to other hazard warning types were reported to enhance break reaction time, lane deviation, and maximum deceleration in prior literature [
9]. The results of this current study are aligned with the findings by [
35], who reported that auditory hazard warning system could alert the driver earlier and thus reduce the reaction time.
Furthermore, this study showed improvements of drivers’ hazard perception skills through eight aforementioned hazard types, which was also confirmed by prior research studies, where improvements reported on front-end, rear-end, red-light running, and a sudden cut-in from an adjacent lane type of collisions [
33].
4. Conclusions
The results of this study showed that hazard warning systems, specifically auditory ones, are one of the devices that would warn novice drivers to take notice of the hazardous traffic condition and avoid accidents. The hazard warning systems detecting obstacles around the vehicles and giving various signals, including auditory ones, would stimulate novice drivers’ various senses and warn them to take immediate action to prevent imminent collisions.
The result of this experimental research study made unique contributions in terms of the demographics of the participants, the type of dependent variables, and technology for the simulation. First of all, while older and experienced drivers have been the participants in prior literature [
9,
10,
32,
33], this research study showed that HWSs also are effective in enhancing young and inexperienced drivers’ hazard perception skills, and it is important to use HWSs to improve young and inexperienced drivers’ hazard perception skills because they are disproportionately involved in all car crashes compared to older and experienced drivers [
14,
15].
Secondly, although prior research studies reported improvements by HWSs in BRT, LD, and MD as dependent variables [
9,
10,
32], this research showed that HWSs improve hazard perception skills, as measured by hazard reaction time (HRT) and horizontal scanning (HS), which are some of the most critical skills related to accident avoidance by a novice [
24].Finally, whereas prior literature investigated HWSs within industrialized driving simulators, this study showed HWSs integrated into GMOST, an affordable, accessible, and practical game-based, multi-player, online, simulated training application.
Future studies are recommended to replicate the results of this study with more participants and/or a longer experimentation time, which would also be beneficial. Additionally, the effects of a hazard warning system on improving novice drivers’ hazard perception skills for various collision types, including front-end, side, rear, and intersection collisions could be investigated in a future study.






{kind=link}
{kind=link}
{kind=link}
{kind=link}