An Integrated Design Framework for Safety Interventions on Existing Urban Roads—Development and Case Study Application

Abstract
:1. Introduction
1.1. Background on Quantitative Methods for Road Safety Interventions
- NSPF = average predicted crash frequency from the SPF for a specific road element class, such as in the urban case: segments, three/four-legged, signalized/unsignalized intersections, roundabouts (possibly referred to specific severity classes) (crashes/year);
- L = length of the road segment (km), which is not present in SPFs for road intersections;
- AADT = annual average daily traffic volume, possibly disaggregated in multiplicand components for considering diverse traffic units (motor vehicles, cyclists, and pedestrians) or the importance of the segments intersecting at road intersections (major/minor roads), and having separate coefficient estimates for each volume component (motor vehicles, cyclists, or pedestrians/year);
- Xi = set of predictor variables related to road, traffic features, environmental variables, and context variables;
- βi = set of regression coefficients, which include β0, β1, and β2 as well.
- (crashes/year), average predicted crash frequency, eventually adjusted for local conditions through the application of CMFs on the road element;
- = average observed crash frequency on the same road element (crashes/year);
- statistical weight assigned to the , dependent on the over-dispersion parameter k of the associated SPF and the total predicted crashes in the period (-).
1.2. Background on Qualitative Methods for Road Safety Interventions
- Safety audits (design stage), for new road projects or the enhancement of existing roads, by checking that road safety criteria are respected in the road project;
- Safety inspections (management stage), for identifying safety issues on road elements, by highlighting sites needing interventions based on qualitative scores and judgments.
1.3. Objectives
- Can quantitative and qualitative methods be integrated in a framework that is flexible enough to be applied in different contexts of safety interventions on existing roads?
- What are the possible problems arising from the application of such an integrated framework, by also taking into account the different sources of data needed?
- Which solutions may be provided for the problems that emerged during the application, useful for the future application of the proposed method to other cases?
2. Methods
2.1. Methods: End of Network Screening Stage
2.2. Methods: Diagnosis Stage
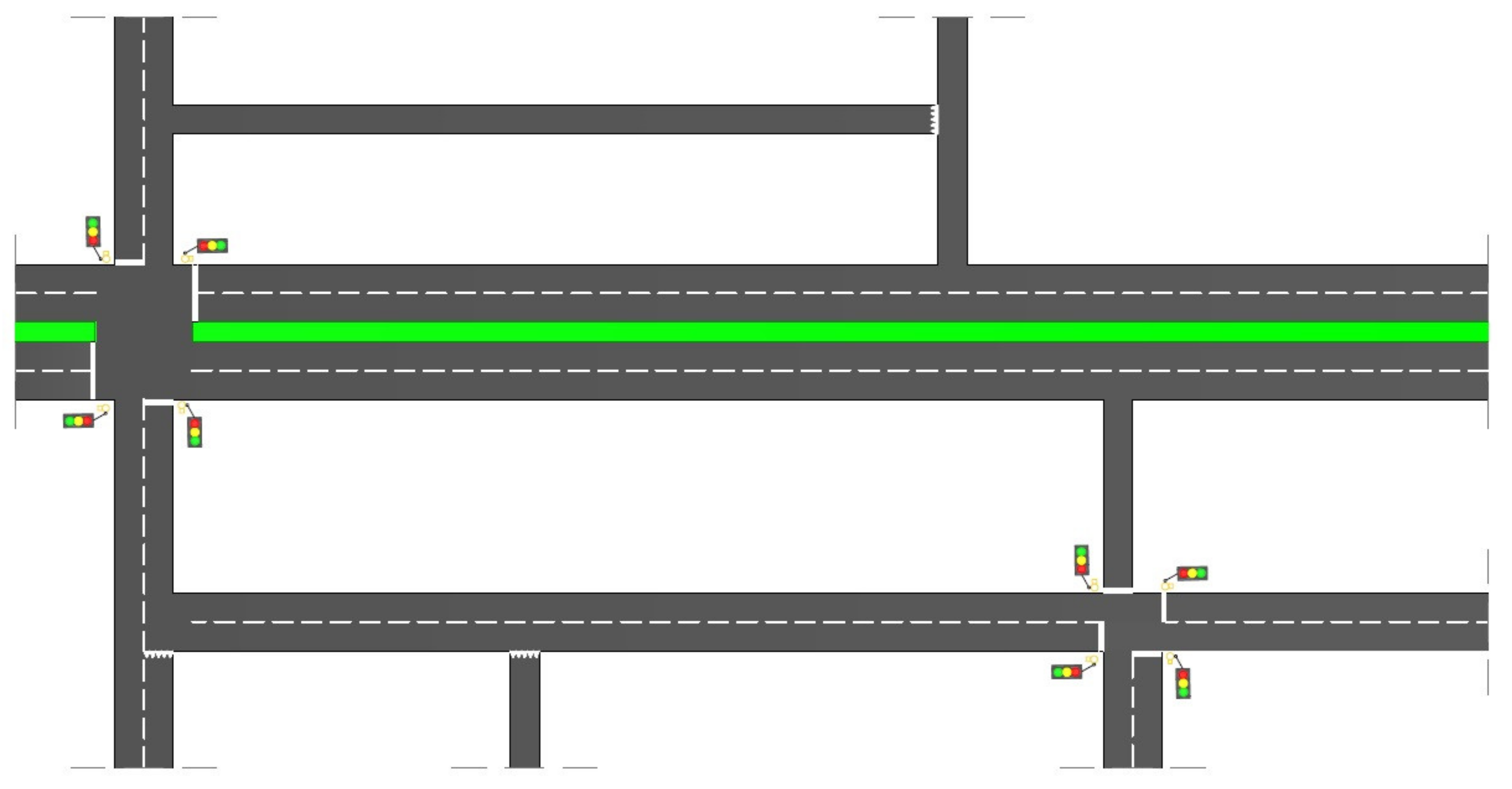
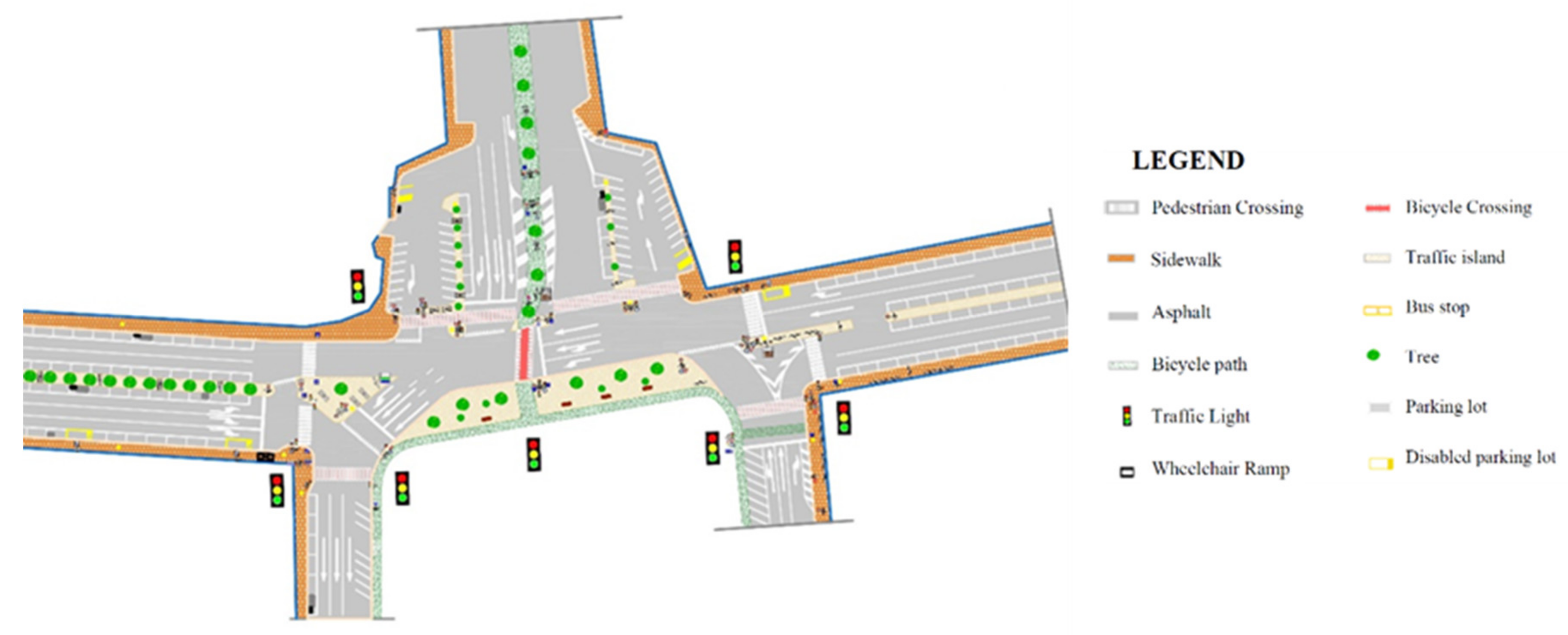
2.2.1. Reconstruction of road geometry
2.2.2. Individuation of homogeneous road elements
- Depending on the reference predictive method, which will be used for the safety predictions (Equation (1)), a sub-segment can be considered as homogeneous if all the road, traffic, and context variables included in the predictive method are reasonably not varying within it. If this step is undertaken at the early design stage, this may simplify the safety prediction applications.
- Traditional variables related to the horizontal and vertical alignment (e.g., radius of curvature, longitudinal/cross slopes) could be overlooked for defining homogeneous urban sub-segments. The rationale for this is that such variables are typically not considered in urban safety predictions (see e.g., [42,43]), possibly depending on the lower speeds and the less demanding urban topography. Clearly, there could be some urban cases in which this assumption may fail, and those variables should be taken into account instead.
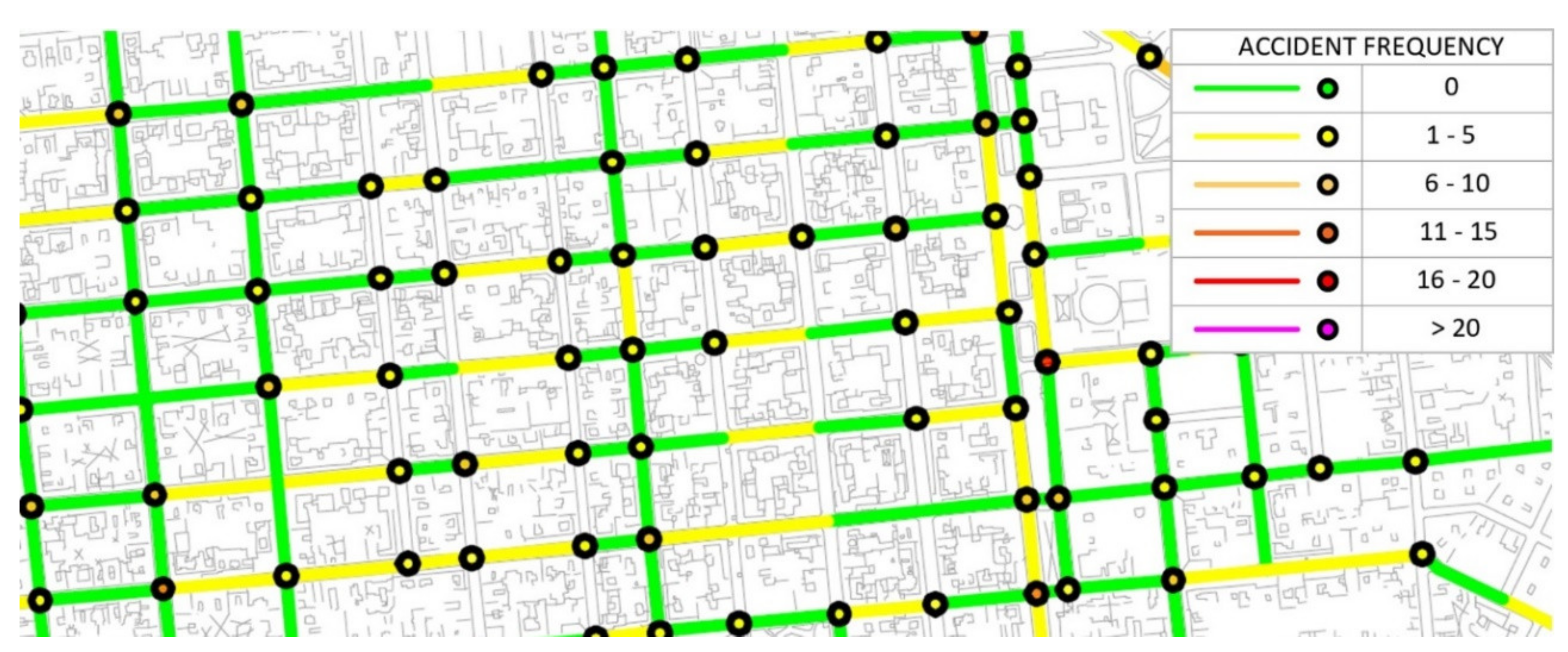
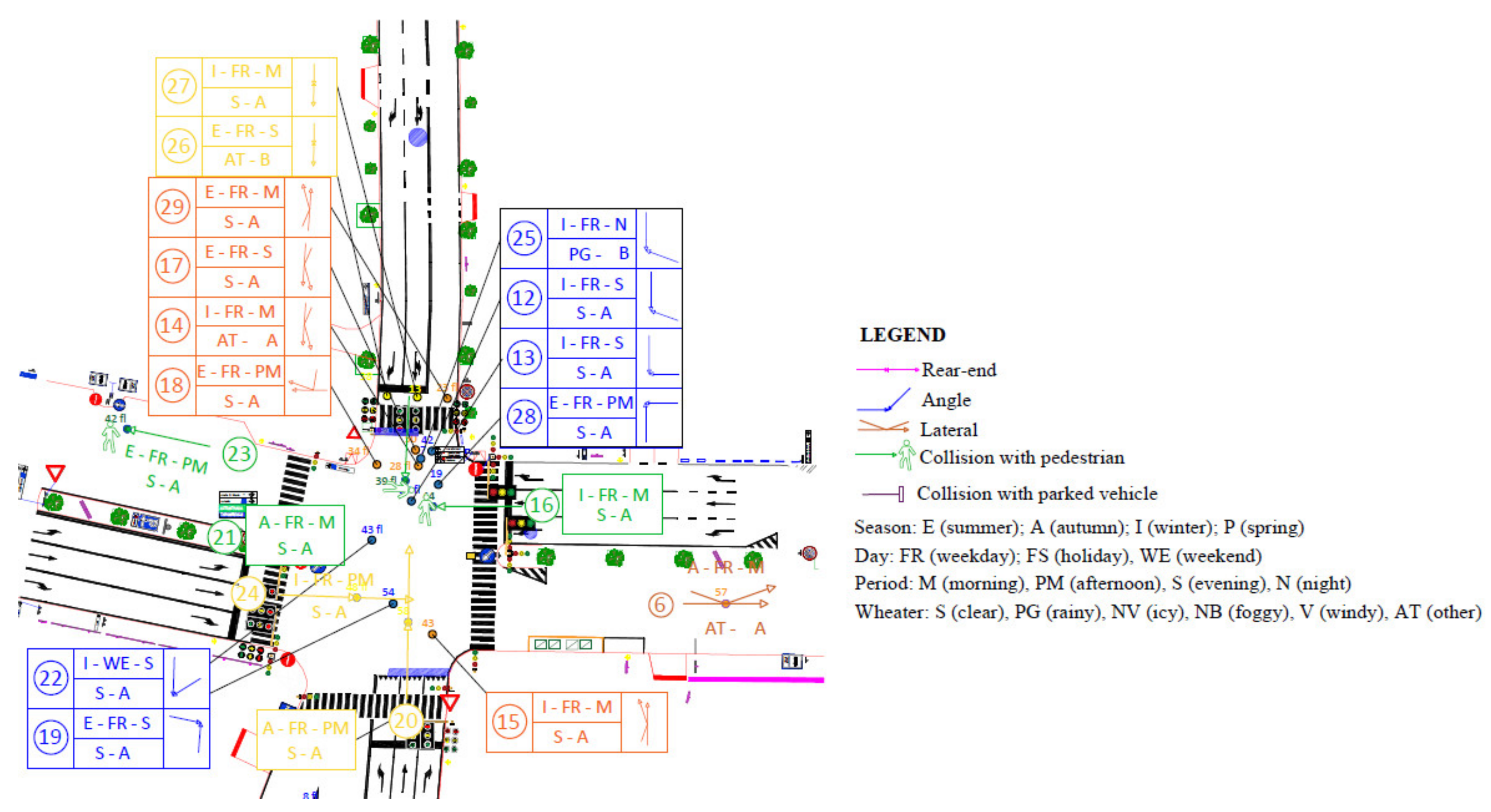
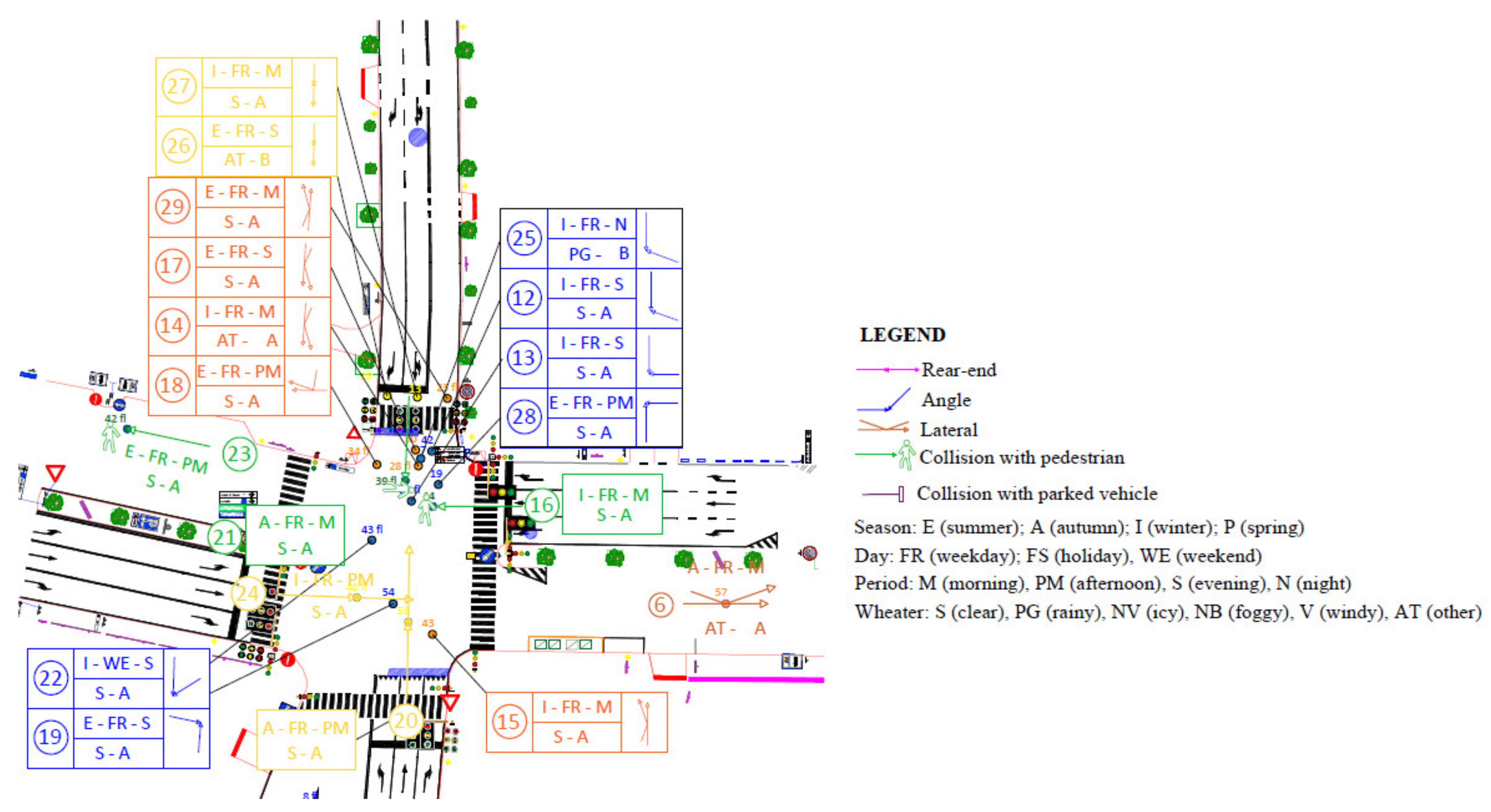
2.2.3. Reconstruction of crashes
- It contributes to numerical EB estimates of the road site crash frequency (Equation (2));
- It summarizes the site-specific safety problems that have resulted in crash outcomes.
2.2.4. Identification of the road function and related criticalities
2.2.5. Check of road geometric standards
- Checks of sight distance at intersections and driveways, especially in residential contexts with several possible visual obstacles;
- Checks of sight distance with specific regard to collisions with VRUs (see e.g., [46]).
2.2.6. Road inspections
2.2.7. Reconstruction of boundary conditions
2.3. Methods: Selection of Countermeasures
2.3.1. Selection of safety measures
- Critical analysis of each safety issue from the diagnosis stage.
- Selection of possible alternative safety measures supported by studies that may document their positive effect on safety. These sources include the CMFs database (e.g., [5,11,17]), systematic reviews based on meta-analyses [4] that also include cost–benefit indications (see also [49]), and examples of solutions that take drivers’ factors into account [50].
- Critical comparison of findings related to the same safety measures, by taking into account the specific environment of each study (urban/rural, two-lane/multi-lane roads), the crash types and severities considered, and the robustness of the methods employed (i.e., through reliability ratings, see [17]). In fact, the CMFs (or functions) that have been developed for some of the specific conditions listed above may be not applicable to different contexts, and they may be actually very different (e.g., CMFs either greater or smaller than one for the same measure).
- Assessment of possible transferability issues dependent on the degree of infrastructure development, and on geographic and socio-economic factors.
- Assessment of the capability for each single measure (deemed as potentially applicable) to solve different identified safety issues in a consistent way. Measures that are able to solve safety issues at a project level should be preferred over punctual measures.
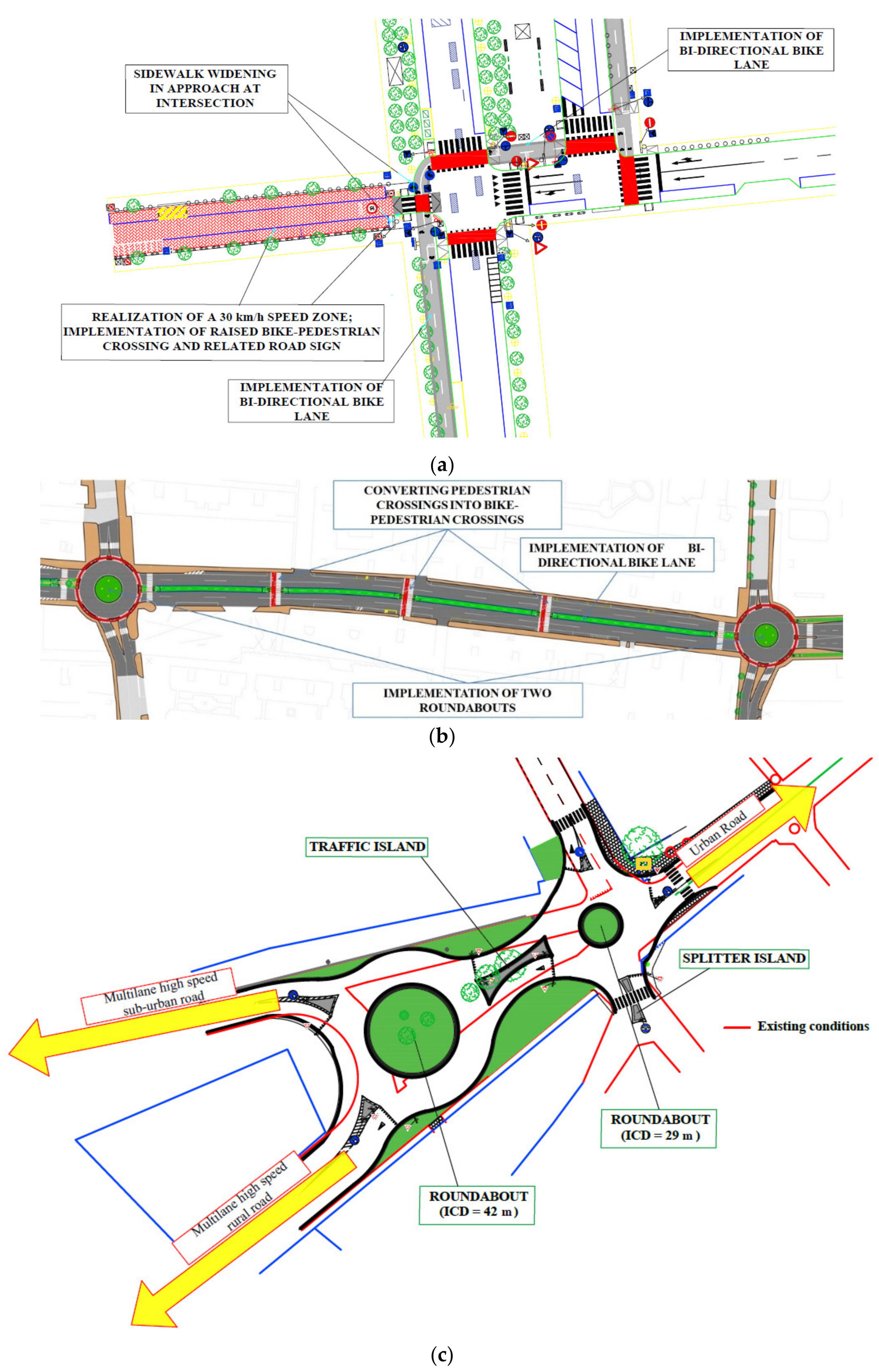
2.3.2. Selection of measures for enhancing sustainable mobility
- Assessment of the need to apply such measures to the specific intervention road site. This should be based on: (1) available urban plans, such as Sustainable Urban Mobility Plans (SUMPs, see [53]), (2) the function of the road on which the intervention is planned within the relevant urban network, and (3) the boundary conditions, such as traffic volumes, including pedestrian and cyclist flows, carriageway width, and land use [54].
- If needed, evaluation of possible infrastructure-related interventions: modify the existing horizontal alignment (i.e., through chicanes, pedestrian refuges, curb extensions, and chokers); the elevation profile (i.e., through speed bumps, humps, cushions, tables, raised pedestrian crossings, and intersections); or surface materials, texture, and color. Bike lanes/paths, alongside the related facilities, could be implemented where appropriate, if absent or inadequate.
- If needed, the evaluation of possible management-related interventions, such as restrictions on vehicle speeds, maneuvers, and access.
- Assessment of the effect of these measures on safety. Generally, these effects are varying, depending also on the application contexts, and some contrasting findings were reported indeed (see e.g., [4,55]). However, traffic calming measures, especially if implemented at the area-wide level, are effective, even if with variable outcomes. For example, reducing operating vehicular speeds down to 30 km/h leads to a consistent decrease in the fatality likelihood for pedestrians involved in crashes [56].
2.3.3. Definition of sets of countermeasures
- One/more sets of short-term safety measures that are relatively inexpensive, easily implementable, and do not require additional approvals, even if they are likely to have only a small positive impact on safety;
- One/more sets of long-term safety measures, typically consisting of drastically modifying and re-shaping the road geometry, which is relatively expensive and requires additional approvals (e.g., for expropriating lands), but is likely to have a strong impact on safety;
- Site-wide intervention composed of different measures, typically based on speed management (traffic calming), with different costs, benefits, and implementation issues.
2.4. Methods: Economic Assessment
2.4.1. Estimation of safety benefits
- SBi = Safety benefit associated to the i-th set of countermeasures (€);
- AASC = Average Crash Social Cost (€/crash);
- = expected number of crashes (see Equation (2)) before the intervention (i-th set of countermeasures) on the j-th homogeneous sub-site (sub-segment or intersection) included in the examined road site (crashes);
- = expected number of crashes (see Equation (2)) after the intervention (i-th set of countermeasures) on the j-th homogeneous sub-site (crashes);
- k-th Crash Modification Factor associated to the i-th set of countermeasures proposed for the j-th homonegeous site with respect to the original conditions (-).
2.4.2. Cost-benefit analyses
3. Results from the Case Study Application of the Integrated Framework
3.1. Results: End of Network Screening
3.1.1. Problem/Solution 3.1.A
3.1.2. Problem/Solution 3.1.B
3.2. Results: Diagnosis
3.2.1. Problem/Solution 3.2.A
- Number of lanes (and/or carriageway width) not coherent with the function and the traffic flow (e.g., wide one-way minor collectors potentially allowing overtaking, double parking, and high speeds, in contrast with the presence of a relevant flow of VRUs, which may generate dangerous conflicts in residential areas);
- Intersection type and/or dimensions not coherent with the function of the intersecting roads (e.g., signalized intersections without specialized lanes, traffic islands, dedicated signals for major collector roads intersecting);
- Several accesses/minor intersections on arterial roads (which may be differently managed);
- Absence of infrastructures and facilities for VRUs (even in case of their relevant presence).
3.2.2. Problem/Solution 3.2.B
- Arterial roads entering into the city, departing/being the continuation of rural roads (Figure 7);
- High-level roads approaching to cities/towns, such as freeways or multi-lane highways.
3.2.3. Problem/Solution 3.2.C
3.3. Results: Selection of Countermeasures
3.3.1. Problem/Solution 3.3.A
3.3.2. Problem/Solution 3.3.B
3.3.3. Problem/Solution 3.3.C
- Long-term measures for high-level urban roads, which include the site geometric reconfiguration, and not only inexpensive punctual measures.
- Short-term measures for secondary roads, having scarce traffic flow and public transports.
3.4. Results: Economic Assessment
3.4.1. Problem/Solution 3.4.A
- The models in [43] for intersections, since: (a) the intersections considered for pilot applications have no intersecting segments with notable grades, and are often not provided with dedicated left/right-turn lanes (variables considered in [74]); (b) a scarce transferability [75] of the models in [74] was determined by applying it in another Italian city; (c) they are more recent; and (d) they include traffic variables for major/minor roads in the three-leg and four-leg cases. Clearly, even detailed models [42,43] lack some safety-related variables (Table 2). Hence, the effect of interventions affecting those variables on safety performances should be estimated through additional CMFs (by carefully checking their applicability).
3.4.2. Problem/Solution 3.4.B
3.4.3. Problem/Solution 3.4.C
4. Discussion
4.1. Integration of Quantitative Assessments and Qualitative Methods and Concepts
4.2. Highlighted Problems and Proposed Solutions within the Design Framework Application
4.3. Concluding Remarks
Supplementary Materials
Author Contributions
Funding
Acknowledgements
Conflicts of Interest
References
- Eurostat Data. Available online: https://ec.europa.eu/eurostat (accessed on 1 December 2018).
- ACI (Italian Automobile Club)—ISTAT (Italian National Institute of Statistics) Data. Available online: http://www.aci.it/laci/studi-e-ricerche/dati-e-statistiche/incidentalita.html (accessed on 1 December 2018).
- Colonna, P.; Intini, P.; Berloco, N.; Ranieri, V. Integrated American-European protocol for safety interventions on existing two-lane rural roads. Eur. Transp. Res. Rev. 2018, 10, 5. [Google Scholar] [CrossRef]
- Elvik, R.; Vaa, T.; Hoye, A.; Sorensen, M. (Eds.) The Handbook of Road Safety Measures; Emerald Group Publishing: Bingley, UK, 2009. [Google Scholar]
- AASHTO (American Association of State Highway and Transportation Officials). Highway Safety Manual; AASHTO: Washington, DC, USA, 2010. [Google Scholar]
- Hauer, E. The Art of Regression Modeling in Road Safety; Springer: New York, NY, USA, 2015; Volume 38. [Google Scholar]
- Hauer, E.; Bonneson, J.; Council, F.; Srinivasan, R.; Zegeer, C. Crash modification factors: Foundational issues. Transp. Res. Rec. J. Transp. Res. Board 2012, 2279, 67–74. [Google Scholar] [CrossRef]
- Lord, D.; Mannering, F. The statistical analysis of crash-frequency data: A review and assessment of methodological alternatives. Transp. Res. Part A Policy Pract. 2010, 44, 291–305. [Google Scholar] [CrossRef]
- Hauer, E.; Harwood, D.; Council, F.; Griffith, M. Estimating safety by the empirical Bayes method: A tutorial. Transp. Res. Rec. J. Transp. Res. Board 2002, 1784, 126–131. [Google Scholar] [CrossRef]
- Elvik, R. The predictive validity of empirical Bayes estimates of road safety. Crash Anal. Prev. 2008, 40, 1964–1969. [Google Scholar] [CrossRef] [PubMed]
- EU Pract (Predicting Road ACidents—A Transferable Methodology across Europe) Project. Available online: www.practproject.eu/ (accessed on 1 December 2018).
- Yannis, G.; Dragomanovits, A.; Laiou, A.; Richter, T.; Ruhl, S.; La Torre, F.; Domenichini, L.; Graham, D.; Karathodorou, N.; Li, H. Use of crash prediction models in road safety management—An international inquiry. Transp. Res. Procedia 2016, 14, 4257–4266. [Google Scholar] [CrossRef]
- Harwood, D.W.; Bauer, K.M.; Richard, K.R.; Gilmore, D.K.; Graham, J.L.; Potts, I.B.; Torbic, D.J.; Hauer, E. Methodology to Predict the Safety Performance of Urban and Suburban Arterials; No. NCHRP Project 17-26; National Academy of Sciences: Washington, DC, USA, 2007. [Google Scholar]
- Lord, D.; Persaud, B. Crash prediction models with and without trend: Application of the generalized estimating equations procedure. Transp. Res. Rec. J. Transp. Res. Board 2000, 1717, 102–108. [Google Scholar] [CrossRef]
- Sayed, T.; Rodriguez, F. Crash prediction models for urban unsignalized intersections in British Columbia. Transp. Res. Rec. J. Transp. Res. Board 1999, 1665, 93–99. [Google Scholar] [CrossRef]
- Persaud, B.; Lord, D.; Palmisano, J. Calibration and transferability of crash prediction models for urban intersections. Transp. Res. Rec. J. Transp. Res. Board 2002, 1784, 57–64. [Google Scholar] [CrossRef]
- CMF Clearinghouse. Available online: www.cmfclearinghouse.org (accessed on 1 December 2018).
- International Road Assessment Programme. Road Safety Toolkit. Available online: www.toolkit.irap.org (accessed on 1 December 2018).
- Jurewicz, C.; Steinmetz, L.; Turner, B. Australian National Risk Assessment Model (No. AP-R451/14); NSW: Sydney, Australia, 2014; AP-R451-1. [Google Scholar]
- Sawalha, Z.; Sayed, T. Transferability of crash prediction models. Saf. Sci. 2006, 44, 209–219. [Google Scholar] [CrossRef]
- Farid, A.; Abdel-Aty, M.; Lee, J. Transferring and calibrating safety performance functions among multiple states. Crash Anal. Prev. 2018, 117, 276–287. [Google Scholar] [CrossRef] [PubMed]
- Farid, A.; Abdel-Aty, M.; Lee, J.; Eluru, N.; Wang, J.H. Exploring the transferability of safety performance functions. Crash Anal. Prev. 2016, 94, 143–152. [Google Scholar] [CrossRef] [PubMed]
- Elvik, R. International transferability of crash modification functions for horizontal curves. Crash Anal. Prev. 2013, 59, 487–496. [Google Scholar] [CrossRef] [PubMed]
- Park, J.; Abdel-Aty, M.; Lee, J.; Lee, C. Developing crash modification functions to assess safety effects of adding bike lanes for urban arterials with different roadway and socio-economic characteristics. Crash Anal. Prev. 2015, 74, 179–191. [Google Scholar] [CrossRef] [PubMed]
- Council of the European Union; European Parliament. Directive 2008/96/EC of the European Parliament and the Council of 19 November 2008 on Road Infrastructure Safety Management. Off. J. Eur. Union 2008, 319, 59–67. [Google Scholar]
- Ministero delle Infrastrutture e dei Trasporti (Italian Ministry of Infrastructures and Transport). Linee Guida per la Gestione e la Sicurezza delle Infrastrutture Stradali (Allegato al D.M. 35/2011). Guidelines for the Management and Safety of Road Infrastructures (Attached to the D.M. 35/2011); Italian Ministry of Infrastructures and Transport: Rome, Italy, 2011.
- PIARC (World Road Association) Online. Available online: https://roadsafety.piarc.org/en (accessed on 1 December 2018).
- Johansson, R. Vision Zero–Implementing a policy for traffic safety. Saf. Sci. 2009, 47, 826–831. [Google Scholar] [CrossRef]
- Lamm, R.; Psarianos, B.; Mailaender, T. Highway Design and Traffic Safety Engineering Handbook; McGraw-Hill: New York, NY, USA, 1999. [Google Scholar]
- Theeuwes, J.; Godthelp, H. Self-explaining roads. Saf. Sci. 1995, 19, 217–225. [Google Scholar] [CrossRef]
- Charlton, S.G.; Starkey, N.J. Driving on urban roads: How we come to expect the ‘correct’speed. Crash Anal. Prev. 2017, 108, 251–260. [Google Scholar] [CrossRef]
- Montella, A.; Imbriani, L.L.; Marzano, V.; Mauriello, F. Effects on speed and safety of point-to-point speed enforcement systems: Evaluation on the urban motorway A56 Tangenziale di Napoli. Accid. Anal. Prev. 2015, 75, 164–178. [Google Scholar] [CrossRef]
- Nilsson, G. Traffic Safety Dimensions and the Power Model to Describe the Effect of Speed on Safety. Doctoral Dissertation; Lund Institute of Technology, Traffic Engineering, University College London: London, UK, 2004. [Google Scholar]
- Aarts, L.; Van Schagen, I. Driving speed and the risk of road crashes: A review. Crash Anal. Prev. 2006, 38, 215–224. [Google Scholar] [CrossRef]
- Elvik, R. A re-parameterisation of the Power Model of the relationship between the speed of traffic and the number of crashes and crash victims. Crash Anal. Prev. 2013, 50, 854–860. [Google Scholar] [CrossRef] [PubMed]
- Ivan, J.N.; Jonsson, T.; Borsos, A. Motor vehicle speeds: Recommendations for urban sustainability. Transp. Res. Rec. J. Transp. Res. Board 2012, 2301, 1–8. [Google Scholar] [CrossRef]
- Wegman, F. The future of road safety: A worldwide perspective. IATSS Res. 2017, 40, 66–71. [Google Scholar] [CrossRef]
- Cafiso, S.; Cava, G.; Montella, A. Safety inspections as supporting tool for safety management of low-volume roads. Transp. Res. Rec. J. Transp. Res. Board 2011, 2203, 116–125. [Google Scholar] [CrossRef]
- Tripodi, A.; Persia, L.; Di Mascio, P.; Corazza, M.V.; Musso, A. A decision support system for analysis of vulnerable road users safety issues: Results of the Saferbrain project. Procedia-Soc. Behav. Sci. 2012, 53, 841–850. [Google Scholar] [CrossRef]
- Colonna, P.; Berloco, N.; Intini, P.; Ranieri, V. Sicurezza Stradale. Un Approccio Scientifico ad un Problema Tecnico e Comportamentale (Road Safety. A Scientific Approach for a Technical and Behavioural Problem); WIP Edizioni: Bari, Italy, 2016. [Google Scholar]
- Kononov, J.; Allery, B. Level of service of safety: Conceptual blueprint and analytical framework. Transp. Res. Rec. J. Transp. Res. Board 2003, 1840, 57–66. [Google Scholar] [CrossRef]
- Greibe, P. Crash prediction models for urban roads. Crash Anal. Prev. 2003, 35, 273–285. [Google Scholar] [CrossRef]
- Gomes, S.V.; Geedipally, S.R.; Lord, D. Estimating the safety performance of urban intersections in Lisbon, Portugal. Saf. Sci. 2012, 50, 1732–1739. [Google Scholar] [CrossRef]
- Intini, P.; Colonna, P.; Berloco, N.; Ranieri, V.; Ryeng, E. The relationships between familiarity and road accidents: Some case studies. In Transport Infrastructure and Systems: Proceedings of the AIIT International Congress on Transport Infrastructure and Systems (Rome, Italy, 10–12 April 2017); CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- USDOT FHWA (US Department of Transportation. Federal Highway Administration). Highway Functional Classification Concepts, Criteria and Procedures; USDOT FHWA: Washington, DC, USA, 2013. [Google Scholar]
- Dixon, K.; van Schalkwyk, I.; Layton, R. Balancing urban driveway design demands based on stopping sight distance. Transp. Res. Rec. J. Transp. Res. Board 2009, 2120, 18–27. [Google Scholar] [CrossRef]
- National Academies of Sciences, Engineering, and Medicine. Guidance for Evaluating the Safety Impacts of Intersection Sight Distance; The National Academies Press: Washington, DC, USA, 2018. [Google Scholar] [CrossRef]
- Demasi, F.; Loprencipe, G.; Moretti, L. Road safety analysis of urban roads: Case study of an Italian municipality. Safety 2018, 4, 58. [Google Scholar] [CrossRef]
- ROSEBUD (Road Safety and Environmental Benefit-Cost and Cost-Effectiveness Analysis for Use in Decision-Making) EU Project. Examples of Assessed Road Safety Measures—A Short Handbook; European Commission: Brussels, Belgium, 2006. [Google Scholar]
- Campbell, J.L.; Lichty, M.G.; Brown, J.L.; Richard, C.M.; Graving, J.S.; Graham, J.; O’Laughlin, M.; Torbic, D.; Harwood, D. Human Factors Guidelines for Road Systems; Transportation Research Board: Washington, DC, USA, 2012. [Google Scholar]
- Jacobsen, P.L. Safety in numbers: More walkers and bicyclists, safer walking and bicycling. Inj. Prev. 2003, 9, 205–209. [Google Scholar] [CrossRef] [PubMed]
- Cairns, J.; Warren, J.; Garthwaite, K.; Greig, G.; Bambra, C. Go slow: An umbrella review of the effects of 20 mph zones and limits on health and health inequalities. J. Public Health 2014, 37, 515–520. [Google Scholar] [CrossRef] [PubMed]
- Wefering, F.; Rupprecht, S.; Bührmann, S.; Böhler-Baedeker, S. Guidelines. Developing and Implementing a Sustainable Urban Mobility Plan; European Commission: Brussels, Belgium, 2013. [Google Scholar]
- Colonna, P.; Berloco, N.; Circella, G. The interaction between land use and transport planning: A methodological issue. Procedia-Soc. Behav. Sci. 2012, 53, 84–95. [Google Scholar] [CrossRef]
- Schepers, J.P.; Kroeze, P.A.; Sweers, W.; Wüst, J.C. Road factors and bicycle–motor vehicle crashes at unsignalized priority intersections. Crash Anal. Prev. 2011, 43, 853–861. [Google Scholar] [CrossRef] [PubMed]
- Ewing, R.; Dumbaugh, E. The built environment and traffic safety: A review of empirical evidence. J. Plan. Lit. 2009, 23, 347–367. [Google Scholar] [CrossRef]
- ASSET (Agenzia Regionale Strategica per la Sviluppo Ecosostenibile del Territorio, in English: “Regional Strategic Agency for Ecosustainable Area Development”, Puglia Region, Italy), formerly AREM (Agenzia Regionale per la Mobilità, in English: “Regional Agency for Mobility”). Available online: http://asset.regione.puglia.it/ (accessed on 1 December 2018).
- Colonna, P.; Berloco, N.; Fedele, V.; Intini, P.; Masi, G.; Ranieri, V. Report del Progetto PA.S.S.S., I Anno di Attività (Report of the Pa.S.S.S: Project, 1st Year); Politecnico di Bari: Bari, Italy, 2018. [Google Scholar]
- Wijinen, W.; Weijermars, W.; Vanden Berghe, W.; Schoeters, A.; Bauer, R.; Carnis, L.; Elvik, R.; Theofilatos, A.; Filtness, A.; Reed, S.; et al. Crash Cost Estimates for European Countries, Deliverable 3.2 of the H2020 Project SafetyCube; Loughborough University, SafetyCube: Loughborough, UK, 2017. [Google Scholar]
- Montella, A.; Andreassen, D.; Tarko, A.P.; Turner, S.; Mauriello, F.; Imbriani, L.L.; Romero, M.A. Crash databases in Australasia, the European Union, and the United States: Review and prospects for improvement. Transp. Res. Rec. 2013, 2386, 128–136. [Google Scholar] [CrossRef]
- Lantieri, C.; Lamperti, R.; Simone, A.; Costa, M.; Vignali, V.; Sangiorgi, C.; Dondi, G. Gateway design assessment in the transition from high to low speed areas. Transp. Res. Part F Traffic Psychol. Behav. 2015, 34, 41–53. [Google Scholar] [CrossRef]
- Charlton, S.G.; Mackie, H.W.; Baas, P.H.; Hay, K.; Menezes, M.; Dixon, C. Using endemic road features to create self-explaining roads and reduce vehicle speeds. Crash Anal. Prev. 2010, 42, 1989–1998. [Google Scholar] [CrossRef]
- DiGioia, J.; Watkins, K.E.; Xu, Y.; Rodgers, M.; Guensler, R. Safety impacts of bicycle infrastructure: A critical review. J. Saf. Res. 2017, 61, 105–119. [Google Scholar] [CrossRef]
- Rodegerdts, L.A.; Nevers, B.; Robinson, B.; Ringert, J.; Koonce, P.; Bansen, J.; Nguyen, T.; McGill, J.; Stewart, D.; Suggett, J.; et al. Signalized Intersections: Informational Guide; Publication No. FHWA-HRT-04-091; FHWA: Washington, DC, USA, 2004. [Google Scholar]
- Jensen, S.U. Bicycle tracks and lanes: A before–after study. In Proceedings of the 87th Annual Meeting of the Transportation Research Board, Washington, DC, USA, 13–17 January 2008. [Google Scholar]
- Hunter, W.W.; Harkey, D.L.; Stewart, J.R.; Birk, M.L. Evaluation of blue bike-lane treatment in Portland, Oregon. Transp. Res. Rec. 2000, 1705, 107–115. [Google Scholar] [CrossRef]
- Lusk, A.C.; Morency, P.; Miranda-Moreno, L.F.; Willett, W.C.; Dennerlein, J.T. Bicycle guidelines and crash rates on cycle tracks in the United States. Am. J. Public Health 2013, 103, 1240–1248. [Google Scholar] [CrossRef] [PubMed]
- Daniels, S.; Nuyts, E.; Wets, G. The effects of roundabouts on traffic safety for bicyclists: An observational study. Crash Anal. Prev. 2008, 40, 518–526. [Google Scholar] [CrossRef] [PubMed]
- Anjana, S.; LR Anjaneyulu, M.V. Development of safety performance measures for urban roundabouts in India. J. Transp. Eng. 2014, 141, 401–406. [Google Scholar] [CrossRef]
- Elvik, R. The non-linearity of risk and the promotion of environmentally sustainable transport. Accid. Anal. Prev. 2009, 41, 849–855. [Google Scholar] [CrossRef] [PubMed]
- Elvik, R.; Bjørnskau, T. Safety-in-numbers: A systematic review and meta-analysis of evidence. Saf. Sci. 2017, 92, 274–282. [Google Scholar] [CrossRef]
- WHO (World Health Organization). Available online: https://extranet.who.int/roadsafety/death-on-the-roads/ (accessed on 1 January 2019).
- Fancello, G.; Soddu, S.; Fadda, P. A crash prediction model for urban road networks. J. Transp. Saf. Secur. 2018, 10, 387–405. [Google Scholar]
- Canale, S.; Leonardi, S.; Pappalardo, G. The reliability of the urban road network: Crash forecast models. In Proceedings of the 3rd International SIIV Conference, Bari, Italy, 22–24 September 2005; pp. 1–22. [Google Scholar]
- Marchionna, A.; Perco, P.; Tavernar, M.C. Transferability of crash prediction models for urban intersections. In Proceedings of the 17th National SIIV Congress, Enna, Italy, 10–12 September 2008. [Google Scholar]
- Jonsson, T. Predictive Models for Accidents on Urban Links—A Focus on Vulnerable Road Users; Bulletin/Lund Institute of Technology, Department of Technology and Society: Lund, Sweden, 2005; p. 226. [Google Scholar]
- Brüde, U.; Larsson, J. Models for predicting accidents at junctions where pedestrians and cyclists are involved. How well do they fit? Accid. Anal. Prev. 1993, 25, 499–509. [Google Scholar] [CrossRef]
- Banister, D.; Akerman, J.; Stead, D.; Nijkamp, P.; Dreborg, K.; Steen, P. European Transport Policy and Sustainable Mobility; Taylor & Francis: Abingdon, UK, 2000. [Google Scholar]
- Caliendo, C.; De Guglielmo, M.L. Road transition zones between the rural and urban environment: Evaluation of speed and traffic performance using a microsimulation approach. J. Transp. Eng. 2012, 139, 295–305. [Google Scholar] [CrossRef]
- Colonna, P.; Berloco, N. Transition zones between urban and inter-urban areas: Identification and definition criteria. In Proceedings of the 24th World Road Congress World Road Association (PIARC), Mexico City, Mexico, 26–30 September 2011. [Google Scholar]
- World Health Organization. Global Status Report on Road Safety 2015; World Health Organization: Geneva, Switzerland, 2015. [Google Scholar]
- Berloco, N.; Colonna, P.; Intini, P.; Ranieri, V. Investigating the deviation angle method for ensuring deflection at one-lane rural roundabouts. Baltic J. Road Bridge Eng. 2018, 13, 127–138. [Google Scholar] [CrossRef]
- Qin, X.; Bill, A.; Chitturi, M.; Noyce, D.A. Evaluation of Roundabout Safety; No. 13-2060. In Proceedings of the 92nd Annual Meeting of the Transportation Research Board, Washington, DC, USA, 13–17 January 2013. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PART OF THE INSPECTION SHEET FOR ROAD SEGMENTS | ||||
|---|---|---|---|---|
| MACRO-ITEM | ITEM | PARAMETER | INDICATOR | JUDGMENT (TO BE FILLED BY THE OPERATOR) |
| ROAD CARRIAGEWAY | CARRIAGEWAY | SHOULDER | ABSENCE/INSUFFICIENT WIDTH | No issues detected, light or severe issues detected |
| NARROWING IN PRESENCE OF HIGH PEDESTRIAN FLOWS | No issues detected, light or severe issues detected | |||
| TRAVEL LANES | INADEQUATE WIDTH | No issues detected, light or severe issues detected | ||
| INADEQUATE COORDINATION WITH OTHER FLOWS | No issues detected, light or severe issues detected | |||
| SPECIALIZED LANE | INADEQUATE WIDTH | No issues detected, light or severe issues detected | ||
| INADEQUATE COORDINATION WITH OTHER FLOWS | No issues detected, light or severe issues detected | |||
| RESERVED LANE | INADEQUATE WIDTH | No issues detected, light or severe issues detected | ||
| INADEQUATE COORDINATION WITH OTHER FLOWS | No issues detected, light or severe issues detected | |||
| BUS STOP | INADEQUATE DIMENSIONS | No issues detected, light or severe issues detected | ||
| LOCALIZATION | No issues detected, light or severe issues detected | |||
| DISCONTINUITY OF PEDESTRIAN PATHS | No issues detected, light or severe issues detected | |||
| MEDIAN | ABSENCE | No issues detected, light or severe issues detected | ||
| EFFECTS ON VISIBILITY | No issues detected, light or severe issues detected | |||
| INADEQUATE ORGANIZATION OF AREAS | No issues detected, light or severe issues detected | |||
| PARKING LOTS | INADEQUATE ORGANIZATION OF AREAS | No issues detected, light or severe issues detected | ||
| INADEQUATE COORDINATION WITH OTHER FLOWS | No issues detected, light or severe issues detected | |||
| PEDESTRIAN/BIKE PATHS | CROSS SECTION WIDTH | No issues detected, light or severe issues detected | ||
| PAVEMENT MAINTENANCE | No issues detected, light or severe issues detected | |||
| PRESENCE OF OBSTACLES | No issues detected, light or severe issues detected | |||
| PRESENCE OF MEDIANS | No issues detected, light or severe issues detected | |||
| PART OF THE INSPECTION SHEET FOR ROAD INTERSECTIONS | ||||
| MACRO-ITEM | ITEM | PARAMETER | INDICATOR | JUDGMENT (TO BE FILLED BY THE OPERATOR) |
| ROAD CARRIAGEWAY | CARRIAGEWAY | SHOULDER | ABSENCE/INSUFFICIENT WIDTH | No issues detected, light or severe issues detected |
| NARROWING IN PRESENCE OF HIGH PEDESTRIAN FLOWS | No issues detected, light or severe issues detected | |||
| SPECIALIZED LANE | INADEQUATE WIDTH | No issues detected, light or severe issues detected | ||
| INADEQUATE COORDINATION WITH OTHER FLOWS | No issues detected, light or severe issues detected | |||
| RESERVED LANE | INADEQUATE WIDTH | No issues detected, light or severe issues detected | ||
| INADEQUATE COORDINATION WITH OTHER FLOWS | No issues detected, light or severe issues detected | |||
| TRAFFIC ISLAND | EFFECTS ON VISIBILITY | No issues detected, light or severe issues detected | ||
| INADEQUATE ORGANIZATION OF AREAS | No issues detected, light or severe issues detected | |||
| PEDESTRIAN/BIKE PATHS | CROSS SECTION WIDTH | No issues detected, light or severe issues detected | ||
| PAVEMENT MAINTENANCE | No issues detected, light or severe issues detected | |||
| Segments | Intersections | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Variables | Included in Final Models as Retrieved in: | Variables | Included in Final Models as Retrieved in: | |||||||||
| [42] | [73] | No Model | [43] | [74] 1 | [73] 2 | No Model | [43] | [74] 1 | [73] 2 | No Model | ||
| Three-Legged Intersections | Four-Legged Intersections | |||||||||||
| AADT | ✔ | ✔ | AADT of major road section | ✔ | ✔ | ✔ | ✔ (no-control, stop) | |||||
| Lenght of road section | ✔ | AADT of minor road section | ✔ | ✔ (stop) | ✔ | ✔ | ||||||
| Speed limit | ✔ | Total entering AADT volume in the intersection | ✔ | ✔ | ||||||||
| Road width | ✔ | Lane balance | ✔ | ✔ | ||||||||
| Number of accesses | ✔ | ✔ | Median presence on one leg of major road | ✔ | ||||||||
| Number of minor exits | ✔ | Median presence on two legs of major road | ✔ | ✔ (stop) | ||||||||
| Parking | ✔ | Median presence on two legs of minor road | ✔ | |||||||||
| Land use | ✔ | Total number of entering lanes on major road | ✔ | |||||||||
| One-way | ✔ | Number of lanes on minor road | ✔(signalized) | |||||||||
| Number of lanes | ✔ | Average lane width on minor road | ✔ (stop) | ✔ | ✔ (no-control, signalized) | |||||||
| Road signs on minor roads/accesses | ✔ | Number of one-way legs | ✔ | |||||||||
| Pavement conditions | ✔ | One-way on major road | ✔ (no-control) | ✔ (no-control, signalized) | ||||||||
| Road markings | ✔ | One-way on minor road | ✔ (stop) | ✔ (no-control) | ||||||||
| Presence of bikelanes/paths | ✔ | Right turn presence on major road 3 | ✔ | ✔ | ✔ (stop, signalized) | |||||||
| Sidewalk width | ✔ | Right turn presence on minor road 3 | ✔ (stop, signalized) | |||||||||
| Median presence | ✔ | Left turn presence on major road 3 | ✔(no-control) | ✔ (stop) | ||||||||
| Bus stops | ✔ | Left turn presence on minor road 3 | ✔ (stop, signalized) | |||||||||
| Bus–taxi lane | ✔ | Sidewalk width on major road | ✔ (stop) | ✔ (signalized) | ||||||||
| Sidewalk width on minor road | ✔ (no-control) | |||||||||||
| Grade on major road section 4 | ✔ (no-control) | ✔ (stop, signalized) | ||||||||||
| Grade on minorroad section 4 | ✔ | ✔ (no-control, stop) | ||||||||||
| Road markings | ✔ | |||||||||||
| Phasing of signals | ✔ (signalized) | |||||||||||
| Sight distance | ✔ | ✔ | ||||||||||
| Pavement conditions | ✔ | ✔ | ||||||||||
| Presence of bike lanes/paths | ✔ | ✔ | ||||||||||
| Bus–taxi lane | ✔ | ✔ | ||||||||||
| Set A (Short-Term Measures) | Set B (Short-Term Measures) | Set C (Long-Term Measures) | Set D (Long-Term Measures + Sustainable Mobility Infrastructures) | |||
|---|---|---|---|---|---|---|
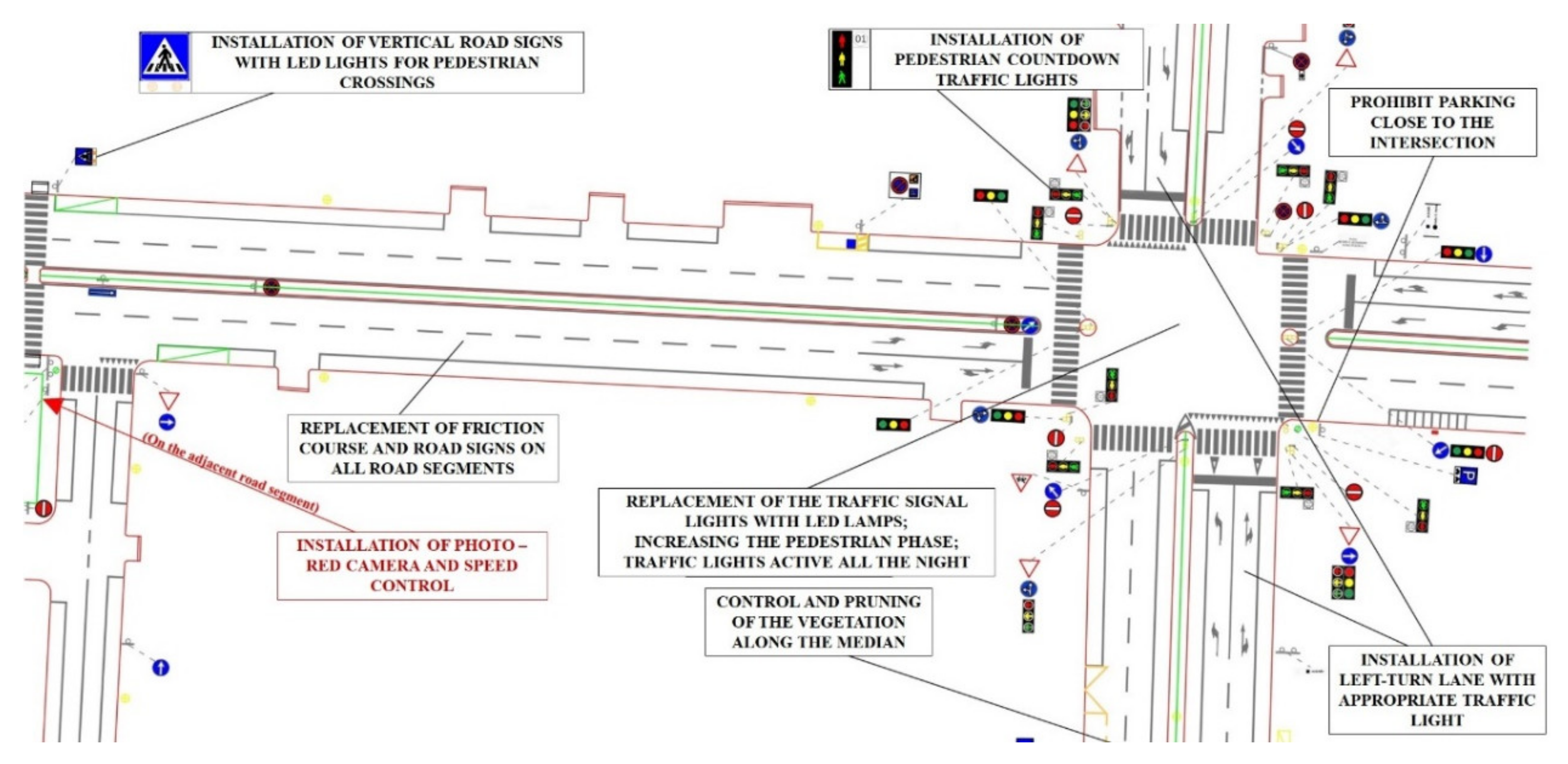
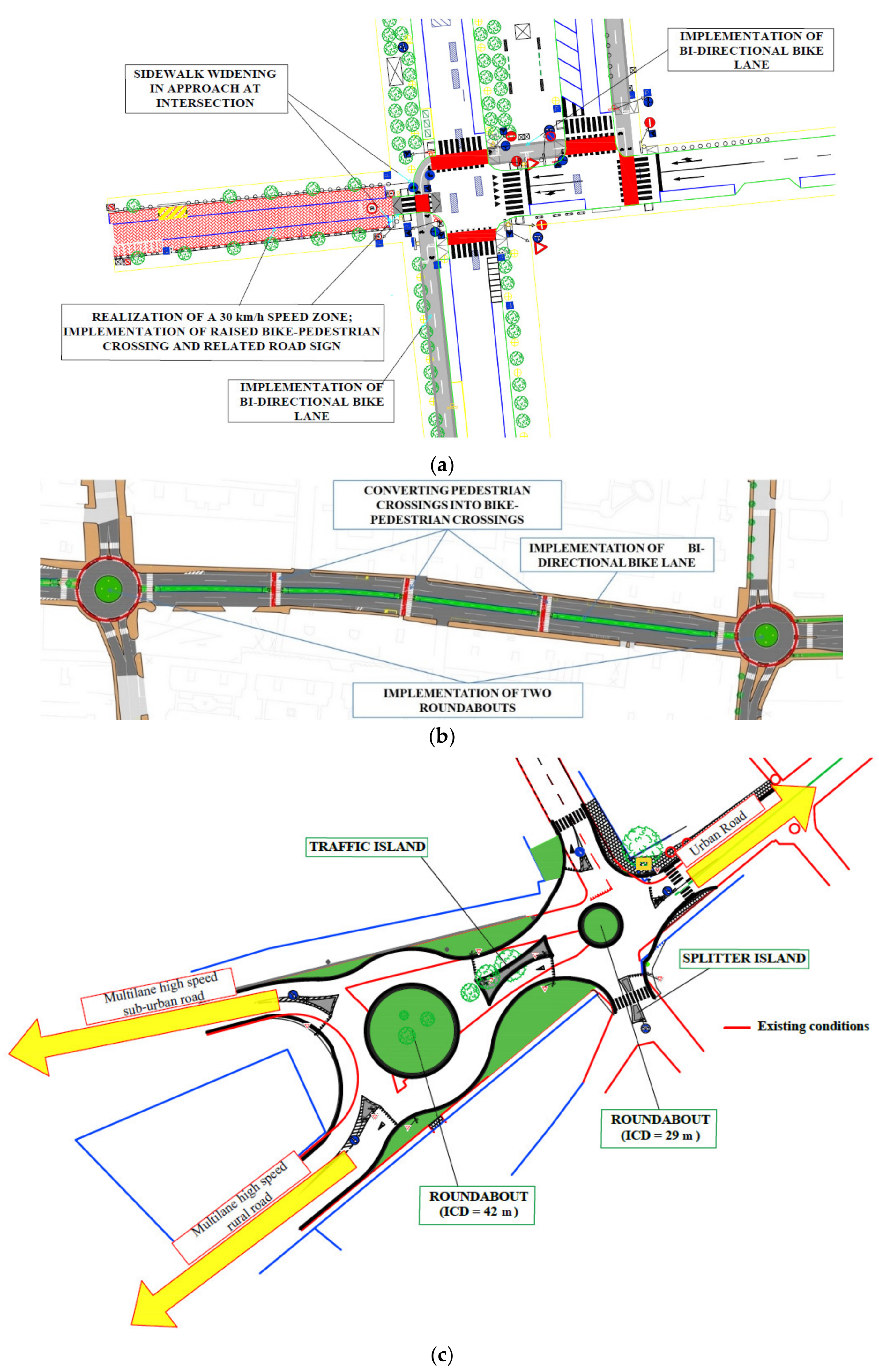
| 1. Installation of transverse rumble strips across lanes in approach at intersections 2. Installation of automatic speed control along segments | 1. Replacement of the friction course 2. Improvement of both road markings and signs 3. Implementation of new pedestrian crossings 4. Installation of optical speed bars 5. Installation of pedestrian crosswalk countdowns 6. Installation of intersection flashing warning signs 7. Turning on traffic lights at night 8. Pruning vegetation and trees | 1. Reconfiguration of the road section along all segments 2. Realization of a chicane at bus stops 3. Implementation of pedestrian crossings 4. Implementation of islands for pedestrians 5. Implementation of traffic islands 6. Installation of barriers along the sidewalks near the school | 1. Implementation of 2 roundabouts in place of existing four-leg intersections 2. Implementation of a bi-directional bike lane 3. Converting pedestrian crossings into bike–pedestrian crossings 4. Replacing lighting systems with light-emitting diode (LED) lights 5. Remove trees from critical places | |||
| Set | Combination | Costs (€) | Benefits (€) | NPV (Net Present Value) | CBA | Incremental CBA |
| A | 1 | Third | Fifth | Fifth | Second | Fourth |
| B | 2 | Fourth | Fourth | Fourth | Sixth | Third |
| A+B | 3 | Fifth (more expensive) | First (more benefits) | First1 | Fifth | First1 |
| C | 4 | First (less expensive) | Sixth | Sixth | First1 | Fifth |
| D | 5 | Second | Third | Third | Fourth | Second |
| D 2 | 6 | Second | Second | Second | Third | Second |
| Segments | Intersections | |||
|---|---|---|---|---|
| Variables | Included in Final Models as Retrieved in: | Variables | Included in Final Models as Retrieved in: | |
| [76] 1 | [77] | [55] 2 | ||
| All | Unsignalized | |||
| Vehicle flow | ✔ | Vehicle flow | ✔ | ✔ |
| Cycling flow | ✔ | Cycling flow | ✔ | ✔ |
| Land use | ✔ | Two-way/one-way cycle track | ✔ ** | |
| Function of street | ✔ | Distance between bike lane and carriageway | ✔ ** | |
| Visibility | ✔ | Red color and quality of markings for bicycle crossings | ✔ ** | |
| Bike transit prohibition | ✔ * | Dedicated VRU crossing | ✔ ** | |
| Raised bicycle crossing or other speed reducing measures | ✔ ** | |||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Colonna, P.; Intini, P.; Berloco, N.; Fedele, V.; Masi, G.; Ranieri, V. An Integrated Design Framework for Safety Interventions on Existing Urban Roads—Development and Case Study Application. Safety 2019, 5, 13. https://doi.org/10.3390/safety5010013
Colonna P, Intini P, Berloco N, Fedele V, Masi G, Ranieri V. An Integrated Design Framework for Safety Interventions on Existing Urban Roads—Development and Case Study Application. Safety. 2019; 5(1):13. https://doi.org/10.3390/safety5010013
Chicago/Turabian StyleColonna, Pasquale, Paolo Intini, Nicola Berloco, Veronica Fedele, Giuseppe Masi, and Vittorio Ranieri. 2019. "An Integrated Design Framework for Safety Interventions on Existing Urban Roads—Development and Case Study Application" Safety 5, no. 1: 13. https://doi.org/10.3390/safety5010013
APA StyleColonna, P., Intini, P., Berloco, N., Fedele, V., Masi, G., & Ranieri, V. (2019). An Integrated Design Framework for Safety Interventions on Existing Urban Roads—Development and Case Study Application. Safety, 5(1), 13. https://doi.org/10.3390/safety5010013