1. Introduction
The incidence of tourist motor vehicle accidents reported in the media can negatively impact tourism by self-drivers. Tourist accidents are not simply isolated events that are publicised by the media. Research from Australia has revealed that a substantial proportion of fatal road accidents involved international license holders with Queensland (28%), Western Australia (23%), and Northern Territory (18%) demonstrating the highest percentages [
1]. In Scotland, 28% of all road accidents involved visitor drivers between the years 1999 and 2002 [
2] and in New Zealand, 6.2% of fatal and injury road accidents involved overseas drivers between 2012 and 2016 [
3]. Taken together, the research has demonstrated that road traffic accidents constitute the most common type of accidents faced by tourists [
4] and the tourist driver is at a higher risk than immigrant drivers and local drivers [
5]. A number of factors have been proposed as causes for tourist motor vehicle accidents, including lack of knowledge of road rules, differences in driver behaviour, alcohol consumption, and driving on the unfamiliar side of the road [
4,
6,
7,
8]. The negative effects of alcohol on driving have been established [
9]; however, there is limited empirical research examining the effects of driving on the unfamiliar side of the road (i.e., on the opposite side of the road from what one is used to). In New Zealand a study examining causes of fatal crashes by foreigners revealed that 20% were due to driving on the incorrect side of the road [
4]. However, to the best of our knowledge there are no studies that have examined driver behaviour while driving on the less familiar side of the road. This study examined the underlying psychological mechanisms that may contribute to tourist driver errors when driving on the opposite side of the road.
In the beginning, learner drivers receive a variety of instructions about steering, braking, and lane position in a similar way that a novice learning to putt a golf ball receives instructions about hand grip (e.g., palms facing each other) and stance (e.g., feet shoulder width apart and parallel to the target line). Learners usually process these sets of instructions when attempting to execute movement. Once the skills are mastered, however, explicitly processing the instructions becomes relatively redundant (the behaviour or skill becomes “automatic”). Nevertheless, in unfamiliar conditions like driving on the opposite side of the road, experienced drivers might be cautioned “not to drive on the wrong side” or may generate self-instructions (often based on rules accumulated early in learning) to drive in a style that reduces the chance of making an error. Previous research has shown that focusing on instructions to guide thoughts and actions, especially avoidant instructions, can lead to performance outcomes that ironically are contradictory to our intentions (i.e., engaging in the behaviour one was trying to avoid) [
10,
11].
In a seminal study on thought suppression, Wegner, Schneider, Carter, and White [
10] revealed that individuals who were specifically instructed not to think about a white bear were unable to suppress this thought and reported more instances of thinking about a white bear than individuals who were instructed to think about a white bear. This phenomenon has been explained via the theory of ironic processes of mental control [
12]. This theory states that mental control is maintained by the functioning of two hypothetical processes: a conscious, cognitively demanding, operating process and a subconscious monitoring process that is less cognitively demanding. The operating process is responsible for consciously identifying mental contents that are consistent with the desired state (e.g., thoughts or preferred outcome). In contrast, the monitoring process is responsible for identifying the mental contents associated with failure to realise the desired state. Under normal circumstances, the operating process is able to work effectively and maintain mental control. However, in cognitively demanding situations (e.g., psychological stress, high workload), the ability of the operating process to bring desired mental contents into conscious awareness is compromised, whereas the ability of the monitoring process to bring to the surface mental contents associated with the undesired state (i.e., avoidant thoughts) continues unchecked.
Ironic effects are not limited to thought processes and have been shown to manifest in actions as well. The role of avoidant instructions has been examined in motor skills like golf [
11], hockey, darts [
13], and balancing tasks [
14]. For example, when given the avoidant instruction not to overshoot a golf putt, participants tended to do what they were instructed not to do, especially when carrying out a secondary task that required them to keep in mind a six-digit number [
11]. The findings also revealed trends for a greater ironic processing effect in novices than in experienced golfers. Nonetheless, there is evidence to suggest that experts, too, can experience ironic effects. In one experiment, experienced dancers were asked to perform a balance task on a wobble board, with and without a backwards counting secondary task [
14]. As predicted from other demonstrations of ironic processing, the participants were more unstable when given instructions to avoid wobbling as compared to instructions to maintain stability, and the cognitive load associated with the secondary task made the ironic effect more pronounced. The secondary tasks used in these studies were designed to serve as proxies for real-world cognitive demands, but recently researchers have examined other conditions, such as anxiety, that can influence cognitive load [
13,
15]. Woodman, Barlow, and Gorgulu [
13] found that under anxiety-provoking conditions (i.e., financial incentive), male university hockey players hit more shots into the to-be-avoided target zone (ironic error zone). In a second study, novices were asked to perform a dart throwing task in low- and high-pressure situations (i.e., a combination of financial incentive and ego-threatening instructions). Participants threw more darts into the to-be-avoided “ironic” zone of the dart board than into the other zones when performing under high pressure.
In sporting contexts, it might be beneficial to predict the directionality of errors caused by avoidant instructions, but the consequences of an error to the left or right would be the same (e.g., a missed goal). In the case of driving a motor vehicle, directionality is typically very important and the consequences of an error can be immediate and disastrous [
16,
17]. For example, a steering correction to the left (or to the right) can either move the vehicle away from oncoming traffic or towards oncoming traffic, depending on the situation. Thus, for a learner driver, an avoidant instruction to “stay away from the centreline” may be useful during early stages of skill acquisition. However, once lane keeping skills are established and automatised, avoidant instructions may be irrelevant, but for these same drivers when faced with the situation of driving on the opposite side of the road (e.g., tourist in another country) these same instructions may actually be counterproductive, resulting in an ironic processing error. The question then becomes whether avoidant instructions and road sign reminders directed at tourists, such as “stay away from the centreline”, might result in ironic effects when drivers are distracted (e.g., admiring the scenery or navigating) or fatigued (e.g., driving after a long flight), which is often the case with tourists. Thus, it is of both practical importance and theoretical interest to understand how ironic processes and avoidant instructions operate in highly automatised tasks such as driving.
The purpose of the current study was to examine the effects of avoidant instructions on driving performance when travelling on a less familiar side of the road (i.e., the right side of the road for New Zealand drivers). Participants were given a set of neutral instructions to maintain the car position in the centre of the lane or avoidant instructions to maintain the car position in the centre of the lane while being particularly careful not to drift towards the centreline. The two sets of instructions were given under low or high cognitive load. A previously validated high cognitive load manipulation—tone counting [
18]—and a roadworks situation designed to increase driving difficulty were used to explore ironic effects under raised cognitive demand. We hypothesised that participants would drift towards the centreline when specifically asked not to do so and that these ‘ironic’ effects would be magnified under high cognitive load. We also hypothesised that drivers would demonstrate lower speed and variability in lateral position under high cognitive load in line with previous research [
19,
20].
2. Results
2.1. Mean Lateral Displacement
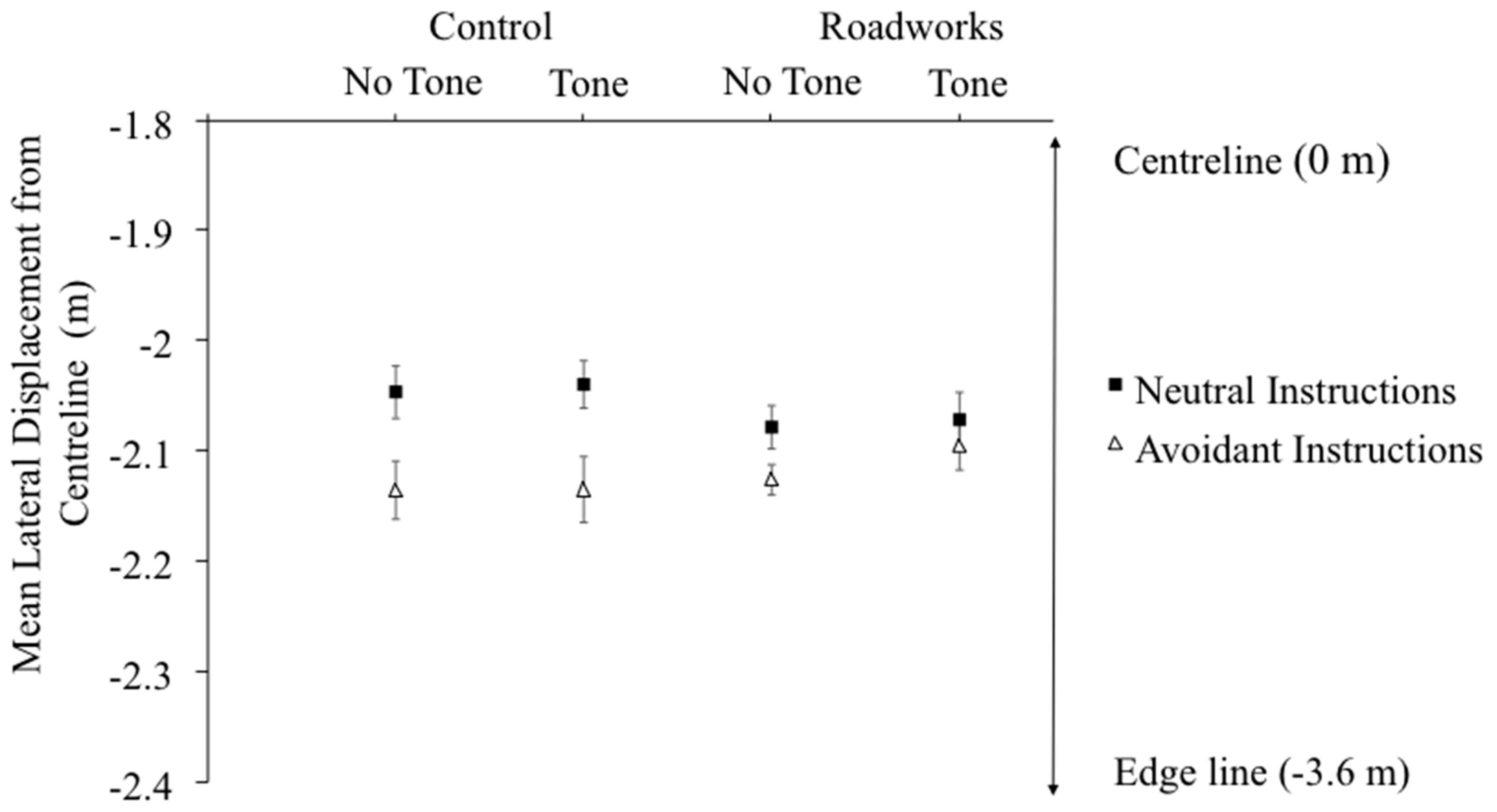
As shown in
Figure 1, participants’ mean lateral displacement indicated that they drove further away from the centreline when told to avoid drifting towards it. This shift away from the centreline was confirmed by a significant main effect of instructions (
F(1, 16) = 12.11,
p = 0.003,
ηp2 = 0.431) in a 2 (instructions) × 2 (difficulty) × 2 (secondary task) repeated measures ANOVA. There were no main effects of difficulty (roadworks) (
F(1, 16) = 0.02,
p = 0.901,
ηp2 = 0.001) or of secondary task (
F(1, 16) = 0.41,
p = 0.532,
ηp2 = 0.03). There was a significant interaction between instructions and difficulty (
F(1, 16) = 10.45 ,
p = 0.005,
ηp2 = 0.395) and post hoc tests revealed that in the control condition, avoidant instructions (
M = 2.14,
SD = 0.21) caused participants to drive further from the centreline than neutral instructions (
M = 2.04,
SD = 0.17),
t(16) = −4.22,
p = 0.001,
d = −1.02. In the roadworks condition, however, there was no significant difference in mean lateral displacement under neutral (
M = 2.08,
SD = 0.09) and avoidant instructions (
M = 2.11,
SD = 0.12),
t(16) = −1.89,
p = 0.076,
d = −0.46. There were no significant differences in mean lateral displacement between the control and roadworks conditions under neutral or avoidant instructions conditions (
p values > 0.05).
2.2. Minimum Lateral Displacement
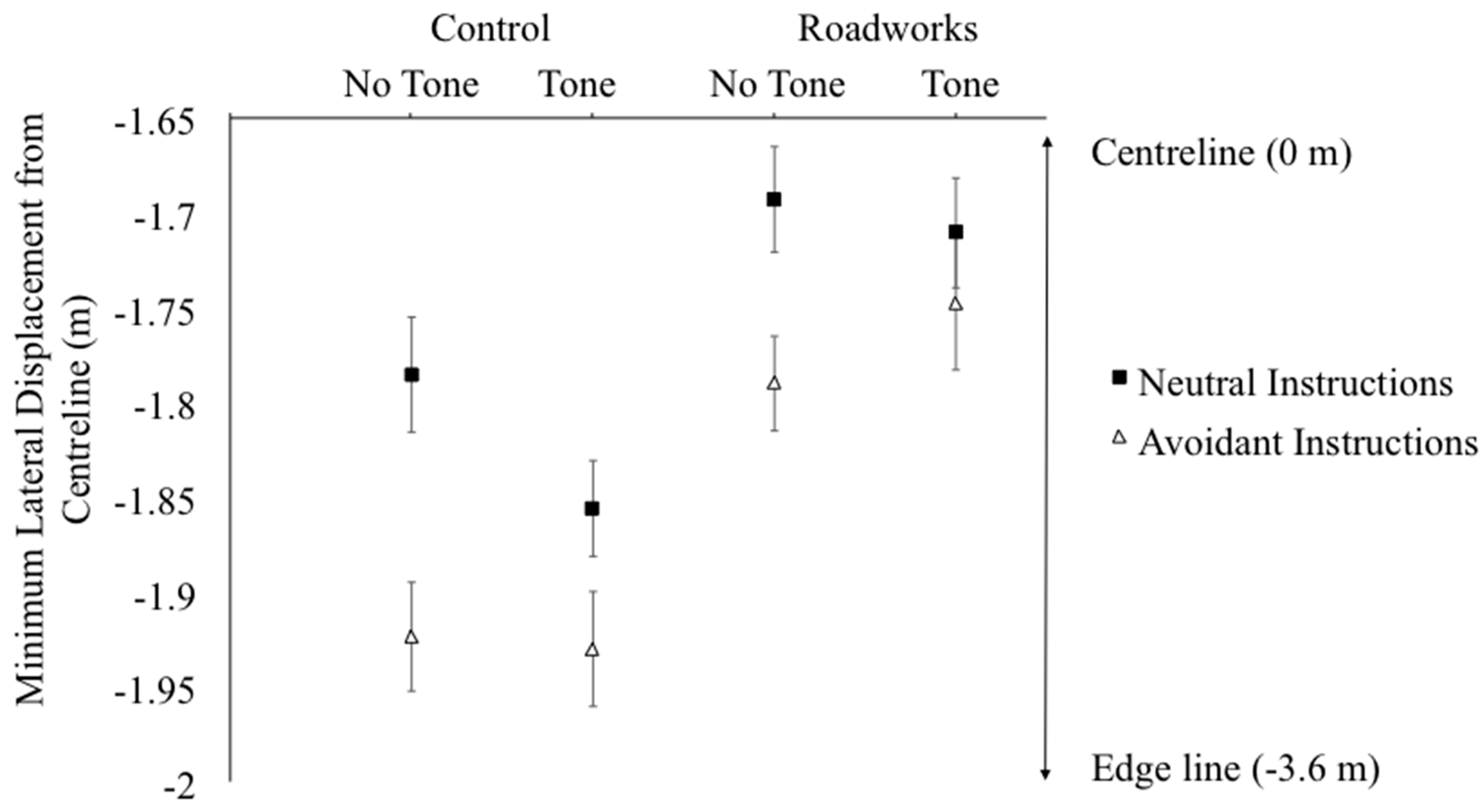
As shown in
Figure 2, when participants were given the avoidant instruction, the closest point of approach to the centreline was further away than when they were given neutral instructions. Additionally, the participants’ closest point of approach to the centreline was closer in the roadworks conditions than in the control condition. These effects were confirmed in the 2 (instructions) × 2 (difficulty) × 2 (secondary task) repeated measures ANOVA, which revealed significant main effects of instructions (
F(1, 16) = 12.70 ,
p = 0.003,
ηp2 = 0.442) and difficulty (
F(1, 16) = 24.23,
p < 0.001,
ηp2 = 0.602). There was no significant main effect of secondary task (
F(1, 16) = 0.24,
p = 0.628,
ηp2 = 0.015 ) and no significant interaction between difficulty and secondary task (
F(1, 16) = 4.48 ,
p = 0.05,
ηp2 = 0.219). There was a significant interaction between instructions and secondary task (
F(1, 16) = 5.10,
p = 0.038,
ηp2 = 0.242) (see
Figure 2). The post hoc tests revealed that when driving without a secondary (tone counting) task, the minimum distance to the centreline was greater under avoidant instructions (
M = 1.86,
SD = 0.18) than under neutral conditions (
M = 1.74,
SD = 0.19),
t(16) = −4.37,
p < 0.001,
d = −1.06, but when driving with a secondary (tone counting) task, there was no significant difference in minimum distance to the centreline between neutral (
M = 1.78,
SD = 0.16) and avoidant instruction conditions (
M = 1.84,
SD = 0.22),
t(16) = −1.92,
p = 0.072,
d = −0.47. There was no significant difference in minimum distance to the centreline in neutral instructions with and without tone counting and, similarly, there was no significant difference in avoidant instructions with and without tone counting (
p values > 0.05).
2.3. Lateral Displacement Variability
As shown in
Figure 3, participants demonstrated greater lateral displacement variability in the more difficult roadworks condition than in the control condition and similarly showed greater variability when driving without a secondary (tone counting) task than when driving with one. The main effects of difficulty (
F(1, 16) = 62.03,
p < 0.001,
ηp2 = 0.795) and secondary task (
F(1, 16) = 5.22,
p = 0.036,
ηp2 = 0.246) found in the 3-way repeated measures ANOVA (instructions × difficulty × secondary task) confirmed this. A significant 3-way interaction between instructions, difficulty, and secondary task (
F(1, 16) = 12.29,
p = 0.003,
ηp2 = 0.435) was found and followed up by separate 2-way ANOVAs for control and roadworks conditions.
For the control condition, the instructions × secondary task repeated measures ANOVA revealed no significant main effect of instructions (F(1, 16) = 0.33, p = 0.574, ηp2 = 0.02), but a significant main effect of secondary task (F(1, 16) = 11.92, p = 0.003, ηp2 = 0.427) and a significant interaction between instructions and secondary task (F(1, 16) = 12.89, p = 0.002, ηp2 = 0.446) were found. Post hoc tests revealed that when driving without a secondary task, participants demonstrated lower variability in lane position in the avoidant instructions condition (M = 0.12, SD = 0.05) than in the neutral instructions condition (M = 0.14, SD = 0.04), t(16) = −2.37, p = 0.031, d = −0.57, although this effect only approached significance after correcting for multiple comparisons (Bonferroni correction = 0.05/4 = 0.0125). There was no significant difference in lateral displacement variability between the two types of instructions when driving with a secondary task (t(16) = 1.84, p = 0.085, d = 0.45). Moreover, in the neutral instructions condition, tone counting (M = 0.10, SD = 0.04) resulted in lower lateral displacement variability than no tone counting (M = 0.14, SD = 0.04), t(16) = 4.73, p < 0.001, d = 1.15, but no significant difference in variability was found between tone counting (M = 0.11, SD = 0.05) and no tone counting (M = 0.12, SD = 0.05) for the avoidant instructions (t(16) = 0.44, p = 0.663, d = 0.11). For the roadworks condition, the instructions × secondary task ANOVA revealed no significant main effects or interactions (p values > 0.05).
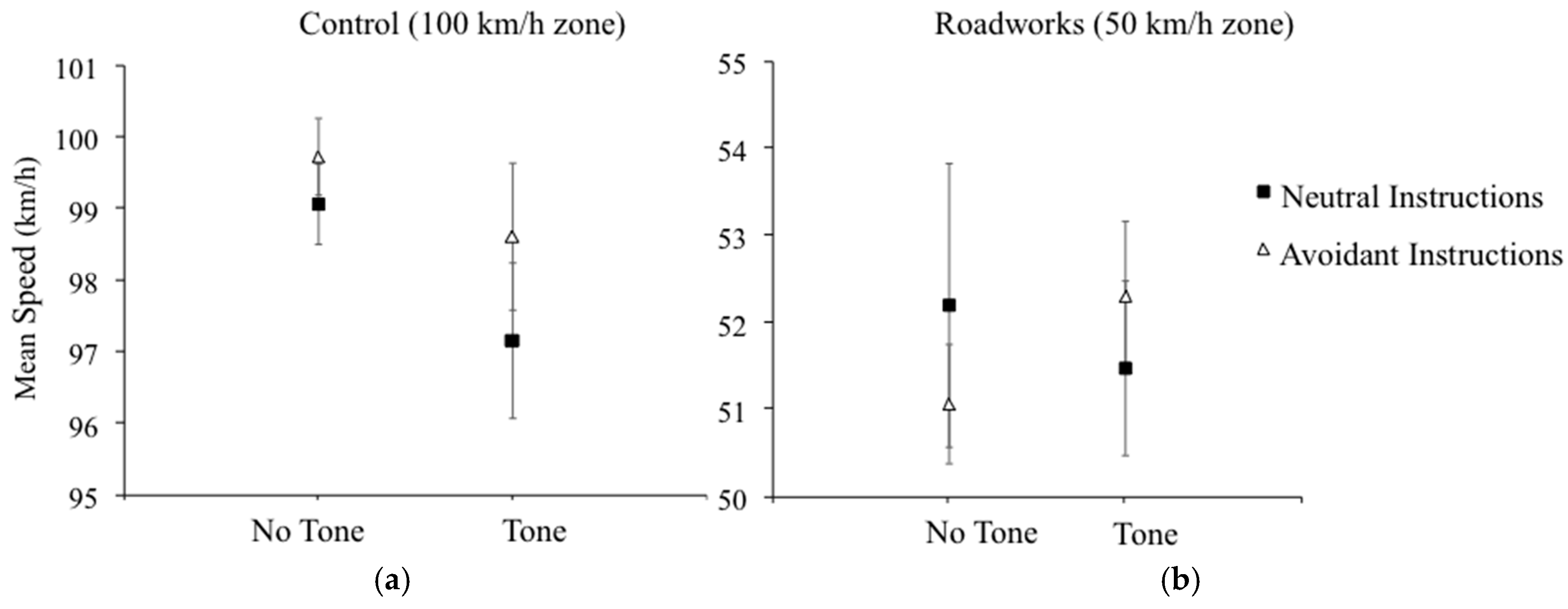
2.4. Mean Speed
The posted speed limit for the roadworks condition was 50 km/h and for the control condition was 100 km/h. As shown in
Figure 4a, the 2-way repeated measures ANOVA revealed a significant main effect of secondary task (
F(1, 16) = 4.92,
p = 0.041,
ηp2 = 0.235) with participants driving slower when performing the secondary task (
M = 97.88,
SD = 5.02) than when not (
M = 99.39,
SD = 3.49), but there was no significant main effect of instructions (
F(1, 16) = 3.89,
p = 0.066,
ηp2 = 0.195) or an interaction between instructions and secondary task (
F(1, 16) = 0.359,
p = 0.558,
ηp2 = 0.022). As seen in
Figure 4b, the 2-way repeated measures ANOVA for the roadworks condition revealed no significant main effects or interactions between instructions and secondary task (
p values > 0.05).
2.5. Tone Counting Accuracy
Overall, participants demonstrated high accuracy in the tone counting task (M = 91.68, SD = 3.23). Tone counting accuracy in the neutral instructions block in control (M = 89.18, SD = 15.38) and roadworks (M = 88.46, SD = 16.32) conditions and in the avoidant instructions block in the control (M = 94.05, SD = 10.73) and roadworks condition (M = 95.01, SD = 6.83) were not significantly different from each other (p values > 0.05).
3. Discussion
Tourist drivers, especially those who drive on the opposite side of the road, have been identified as an at-risk population. This study investigated whether consciously attempting to avoid a certain behaviour would lead to ironic effects (i.e., behaviours in the unintended direction) in a highly automatised aspect of driving (i.e., lane keeping), especially when driving on an unfamiliar side of the road, as may be experienced by tourist drivers. We examined performance under conditions that were designed to increase cognitive load. The findings revealed no evidence that avoidant instructions caused ironic effects but instead revealed overcompensatory behaviour, which has significant practical implications.
Contrary to our predictions, avoidant instructions resulted in participants increasing their driving distance from the centreline. According to the theory of ironic processes, ironic effects are more likely to occur under high cognitive load conditions when the conscious operating process is disrupted, but driving with a secondary (tone counting) task did not evoke ironic behaviour [
12,
13,
14]. When the difficulty of the task was increased in the roadworks condition, ironic responses still did not occur (i.e., drifting towards the centreline).
Participants did not demonstrate ironic responses but instead seemed to overcompensate and drive further away from the centreline. There is limited research that has demonstrated overcompensatory behaviour in response to avoidant instructions [
21,
22]. De la Peña and colleagues proposed an implicit overcompensation hypothesis, which argues that in tasks with multiple responses to choose from, avoidant instructions to steer clear of a certain action (e.g., do not go up), generate an implicit counter message to err in the opposite direction (e.g., go down) [
22]. Evidence in support of the implicit overcompensation hypothesis has been found in golf putting contexts and consistent overcompensatory effects have been demonstrated regardless of the direction of the avoidant instructions (e.g., do not undershoot or do not overshoot) or the type of cognitive load (e.g., visual, cognitive, auditory, or self-presentation) administered [
21,
22]. In the current study, however, avoidant instructions led participants to overcompensate when driving without performing the secondary (tone counting) task, but when driving while tone counting, the effect was no longer present.
Overall, the findings are in line with the primary tenet of the implicit overcompensation hypothesis that avoidant instructions cause overcompensation rather than ironic behaviour, but not in line with the secondary tenet that overcompensation persists in the presence of secondary task loads. Our findings support the proposition that avoidant instructions might be more attention-demanding than neutral instructions. This appeared to be the case with respect to driving performance measures, such as lateral position and speed, which are typically impacted by cognitive demands.
In the current study, drivers demonstrated less variability in lateral displacement when driving while tone counting, which is consistent with previous research [
19,
23] and, similarly, drivers showed less variability in lateral displacement when driving with avoidant instructions compared to neutral instructions. The reduced variability in lateral displacement in response to cognitive load has been explained as an attempt to make the primary driving task easier in order to manage the allocation of attention resources [
20]. Furthermore, although tone counting and avoidant instructions individually impacted variability in lateral displacement, no signs of additive effects were found—potentially due to a “floor effect”. With regard to speed, drivers reduced speeds when performing the secondary task, which is another way in which they could have made the primary driving task easier and consequently freed up attentional resources [
20]. Although the trend for reduced speeds under avoidant instructions was present, it was not statistically significant.
Previous studies have demonstrated overcompensation effects in the presence of cognitive load but in our study, drivers did not overcompensate when performing a secondary (tone-counting) task. This discrepancy in findings could be attributed to the nature of the task (i.e., discrete vs continuous). In the current study, participants were required to continuously process avoidant instructions while driving for a few minutes, which is relatively longer than a discrete golf putting task which occurs within a few seconds [
21,
22,
24]. Thus, adding a cognitive load no longer allowed drivers to process the avoidant instructions.
These results have theoretical and practical implications. From a theoretical perspective, it is possible that avoidant instructions led drivers to demonstrate overcompensatory behaviour because of the high risk of making ironic errors (i.e., potential crash). Thus, risk might be a moderating factor in determining the way people respond to avoidant instructions. Furthermore, the current study findings demonstrated that overcompensatory behaviour was attenuated in cognitively demanding conditions; thus, it might not have been implicit as proposed in previous research. Future research should gather qualitative data to shed light on drivers’ interpretations of the avoidant instructions and their subsequent behaviour to get a better idea of how implicit their behaviour is. From a practical perspective, avoidant instructions led drivers to overcompensate in unfamiliar circumstances such that they erred on the side of caution (away from the centreline). Thus, it appears that the use of avoidant instructions for driving does not lead to dangerous behaviour that one is trying to avoid (ironic behaviour) and could potentially be used for tourist drivers. This study used an external manipulation (spoken avoidant instructions given at the start of the drive), but future work should test more ecologically valid measures to administer self-instructions. For example, with the advent of in-vehicle information systems for tourists (e.g., Advanced Traveller Information Systems, ATIS) it would be worth examining the impact of avoidant instructions delivered by ATIS. Moreover, a driver’s response to avoidant instructions provided by ATIS might be different as compared to reminders provided by a passenger who is aware of the unfolding driving situation and capable of providing continuous “real-time” reminders. Future research should examine the differences in receiving instructions from ATIS and passengers. In addition, further work should examine the effect of avoidant instructions in other demanding situations such as when drivers are physiologically fatigued, as tourist drivers often get off of a long flight and/or drive long distances to get to their destination. Practical solutions such as those suggested above should only be implemented after corroboratory evidence is found.
Furthermore, avoidant instructions might lead to ironic or overcompensatory effects depending on individual differences in personality traits that moderate attention demands. Research in the motor-skill learning domain has established that certain individuals who have a high propensity to consciously monitor and control actions and decisions i.e., high reinvesters [
25,
26,
27]
, are likely to experience performance decrements under pressure; recently, this trait has also been shown to impact driving performance in risky situations [
28]. It would be of interest to investigate whether reinvestment moderates ironic or overcompensatory behaviour and whether this is predictive of tourist road accidents.
Overall, to the best of our knowledge, this study is the first to investigate the underlying mechanisms explaining driver behaviour while driving on the unfamiliar side of the road; however, it is not without its limitations. This study included a relatively small sample size and, thus, although we employed a repeated measures design, the results should be interpreted with caution. Participants were asked to drive while maintaining the car position in the centre of the lane, which might not be a “natural” behaviour for many drivers, so it may be worth identifying typical self-instructions drivers adopt when left to their own devices (e.g., keep a safe distance to the car ahead). This study did not include a true control condition (driving on the left side) to check whether driving on the right side would present itself as an unfamiliar scenario in terms of differentially influencing lane position, variability, and speed measures. Nonetheless, a graphical comparison of driver behaviour in the practice condition (left-side driving) revealed that participants exhibited more controlled driving behaviour (i.e., lower speeds and lower variability in lane position) while driving on the right compared to the left, which is typical when driving in unfamiliar situations [
29].
The results of the study have extended the theoretical understanding of the implicit overcompensation hypothesis to the continuous task of driving. However, further work needs to be conducted in order to determine the implications, such as how implicit is overcompensatory behaviour in the context of driving. For instance, is it possible in tasks such as driving—in which the cost of making an ironic error could be disastrous—that avoidant instructions (do not drift towards the centreline) always produce overcompensatory behaviour on a conscious level? From a practical standpoint these findings suggest that avoidant instructions lead drivers to err on the side of caution rather than display ironic behaviour, especially when driving on an unfamiliar side of the road. Driving under specific situations like physiological fatigue, however, might cause ironic behaviour: warnings with avoidant instructions such as “do not drive fast” might ironically result in fatigued tourists doing precisely so. The findings of this study warrant further research in this area.
Thus far there is very limited research on tourist road accidents which has been conducted primarily in Australia, New Zealand, and Scotland, which have similar driving conditions (e.g., roads and weather conditions) [
2,
4,
6,
8]. However, there is need for more international research in this area. Researchers have proposed solutions like providing information to tourists about being conscious of driving on an unfamiliar side of the road and reminding them not to drive when they are tired [
6]
, but no studies have examined the effects of providing such instructions on driver behaviour. The present study is the first to provide evidence about avoidant instructions to drivers driving on an unfamiliar side of the road. The findings highlight the importance of phrasing of signs and alerts for tourists.
4. Materials and Methods
4.1. Participants
Twenty fully licensed New Zealand drivers volunteered to participate in this study. Two participants dropped out of the study due to simulator sickness; another participant was excluded from the study after reporting 7 years of driving experience on the right side of the road as for this participant, driving on the right would not be an unfamiliar situation. The remaining 17 participants (8 males, 9 females) had a mean age of 32.94 years (SD = 12.35, range 19–57 years) and had been licensed drivers for an average of 15.37 years (SD = 11.84, range 1–39 years). The participants reported driving an average of 112.94 km per week (SD = 136.92 km) with an average 9.47 trips per week (SD = 7.81); a trip was described as driving from one location to another. Five participants reported having limited experience of driving on the right side of the road (range 2–12 months).
4.2. Apparatus
The experiment was carried out in the Transport Research Group driving simulator consisting of an automobile (2010 Toyota Prius plug-in) positioned in front of three angled projection surfaces (see
Figure 5). The centre projection surface was located 2.32 m in front of the driver’s eye position with two peripheral surfaces connected to the central surface at 52 degree angles. The three projection surfaces were angled back away from the driver at 4.30 degrees (from the bottom to the top of the projection surface) and produced a 178.20 degree (horizontal) by 33.70 degree (vertical) forward view of the simulated roadway from the driver’s position. The image projected on the front screen measured 2.60 m wide by 1.47 m high (at a resolution of 1920 by 1200 pixels) and on the two peripheral screens measured 2.88 m by 2.15 m (at a resolution of 1024 by 768). Two colour LCDs with an active area of 12.07 cm by 7.49 cm each at a resolution of 640 by 480 pixels were mounted at the centre rear-view mirror and driver’s wing mirror positions to provide views looking behind the driver’s vehicle. The projected images and vehicle model were updated at a minimum rate of 60 frames per second. Four speakers located inside the car and a subwoofer in the rear cargo area presented realistic engine and road noises as appropriate. The simulation software recorded the participant’s speed, lane position, and control actions automatically throughout the simulation scenario via the vehicle Controller Area Network (CAN bus). Unobtrusive cameras were mounted between the passenger and driver’s seats and on the vehicle dashboard to monitor and record participants’ behaviour during the experimental sessions.
4.3. Driving Scenarios
Participants drove three blocks of simulated driving scenarios. In the first block, they drove a practice scenario, which was a 15 km drive on the left side of the road (typical for New Zealand drivers), in order to gain experience and practice driving in the simulator. The road geometry was based on 3D geometry of a rural two-lane state highway in New Zealand. After this, participants drove a second block containing eight driving scenarios of 5 km each on the right side of the road. For this block of simulated driving, the participants were instructed to drive under neutral instructions to maintain the car position in the centre of the lane. The eight scenarios consisted of two control trials and two roadworks trials driven either with or without a secondary task (tone counting). Following completion, the participants drove the third block, also containing eight 5 km scenarios, but with avoidant instructions to maintain the car position in the centre of the lane, being particularly careful not to drift towards the centreline. Avoidant instructions stated specifically the behaviour we wanted participants to avoid (do not drift towards the centreline) as this is most likely to cause ironic behaviour as opposed to simply giving instructions to perform a certain behaviour (stay to the right). The third test block also consisted of the same driving scenarios as the second block. All roads were driven in a counterbalanced order.
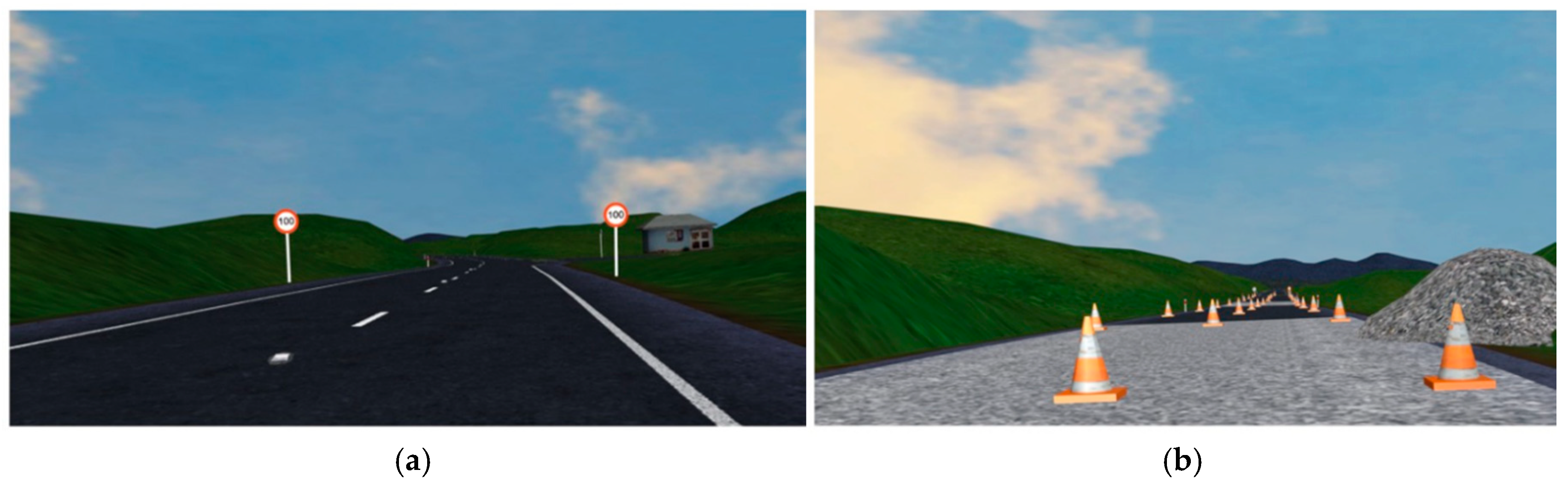
The control roads had a 100 km/h posted speed limit and the roadworks scenario consisted of the same stretch of road as the control roads except that after 600 m participants encountered roadworks with a reduced speed limit sign of 50 km/h (see
Figure 6). All roads were geometrically the same but had different background scenery. The roads had a gentle curve at the beginning and were fairly straight for the rest of the drive. Data analysis was only conducted on the straight section of the road to avoid any confounding effect of road curvature on lateral displacement of the vehicle. Stop signs indicated the end of the trial. The road markings included a standard dashed white centreline and solid white edge lines. The distance from the centreline to the edge line was 3.6 m and from the edge line to the side of the road was 1.8 m. In the roadworks condition, the road cones were placed at a distance of 3.9–4.0 m from the centreline. The test roads included a few oncoming vehicles at the beginning and end sections of the drive but not during the middle section (the data collection zone) to ensure no confounding effect of oncoming traffic on lane position.
4.4. Secondary Tone Counting Task
The secondary (tone counting) task required participants to monitor a series of randomly presented low- (500 Hz) and high-pitched (100 Hz) tones played at a frequency of 1.2 s during the drive and report the number of high-pitched tones. Before the drive, participants listened to a sample audio clip to check if they could differentiate between the two tones. A practice clip of 1 min was then played to participants and they were asked to report the number of high-pitched tones that they counted. In the baseline tone counting trials, participants demonstrated a mean accuracy of 98.26% (SD = 2.9). In the secondary task trials, participants were expected to count the tones while driving and verbally report the number of high-pitched tones to the researcher at the end of the drive.
4.5. Procedure
Participants provided written informed consent before commencing the experimental session and then completed a questionnaire that asked them about demographic information (e.g., age, gender) and driving history (e.g., number of years being a licensed driver, average km driven per week). Following this, participants were seated in the car and were given instructions about how to drive the simulator. They were reminded to drive as they would in their own car and then completed the practice block, which was driven on the left side of the road, after which they were informed that for the rest of the study they would be required to drive on the right side of the road. In the test session, participants drove the first block of trials with neutral instructions and after a short break, they drove a second block of trials with avoidant instructions, which included the same roads as the first block of trials. The experimental session lasted for approximately an hour and participants were compensated for their participation with a NZ$20 gift voucher.
4.6. Analysis
The driving performance measures used in this study were mean lateral displacement of the vehicle from the centreline (m), lateral displacement variability (SD), minimum distance from centreline (m), and mean speed (km/h). Previous studies that have investigated ironic effects in motor skills have done so using discrete actions with a discernible beginning and end (e.g., golf putting, hockey shooting, and dart throwing); hence, ironic errors have been measured as isolated instances or slips in action. As driving is a continuous task, this was not possible, so we analysed the most ironic slip (i.e., minimum distance from centreline) as well as average performance over the course of the drive (i.e., mean lateral displacement of the vehicle from the centreline) to comprehensively assess ironic behaviour.
All performance measures were analysed for the same stretch of road, which consisted of roadworks or no roadworks (control). Separate 2 (instructions: neutral, avoidant) × 2 (difficulty: control, roadworks) × 2 (secondary task: no tone counting, tone counting) repeated measures ANOVAs were carried out for the driving performance measures of mean lateral displacement, minimum lateral displacement, and lateral displacement variability. Significant 3-way interactions were followed by separate 2-way ANOVAs. For the mean speed measure, separate 2 (instructions: neutral, avoidant) × 2 (secondary task: no tone counting, tone counting) ANOVAs were carried out for control and roadworks conditions as the speed limits for these two conditions were different. Partial-eta squared effect sizes were calculated for all
F statistics. Significant 2-way interactions were followed up by Bonferroni-corrected paired samples
t-tests and Cohen’s
d effect size values were reported for all
t statistics. Tone counting accuracy was calculated as the absolute percentage accuracy between actual and reported number of high-pitched tones [
30]. Error bars in graphs depict within-subject error [
31].


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





