
Implications of Articulating Machinery on Operator Line of Sight and Efficacy of Camera Based Proximity Detection Systems


Abstract
:1. Introduction
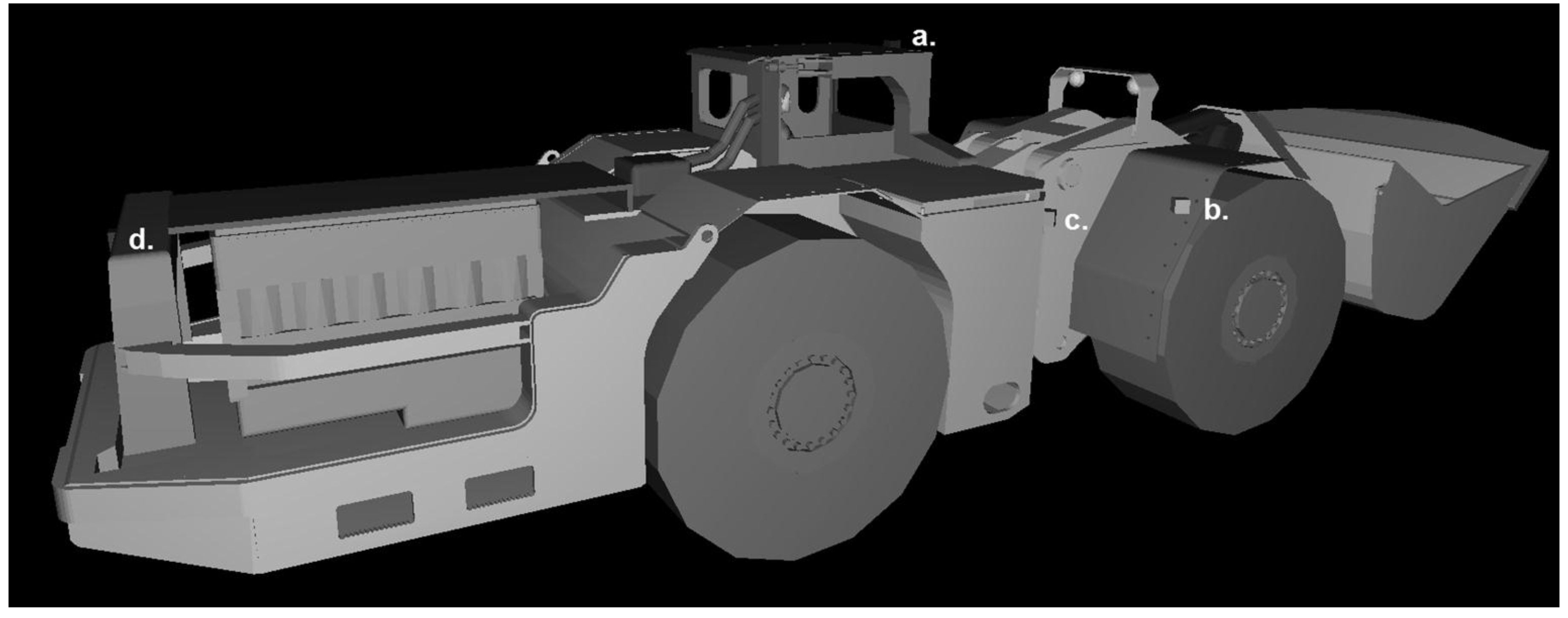
2. Method
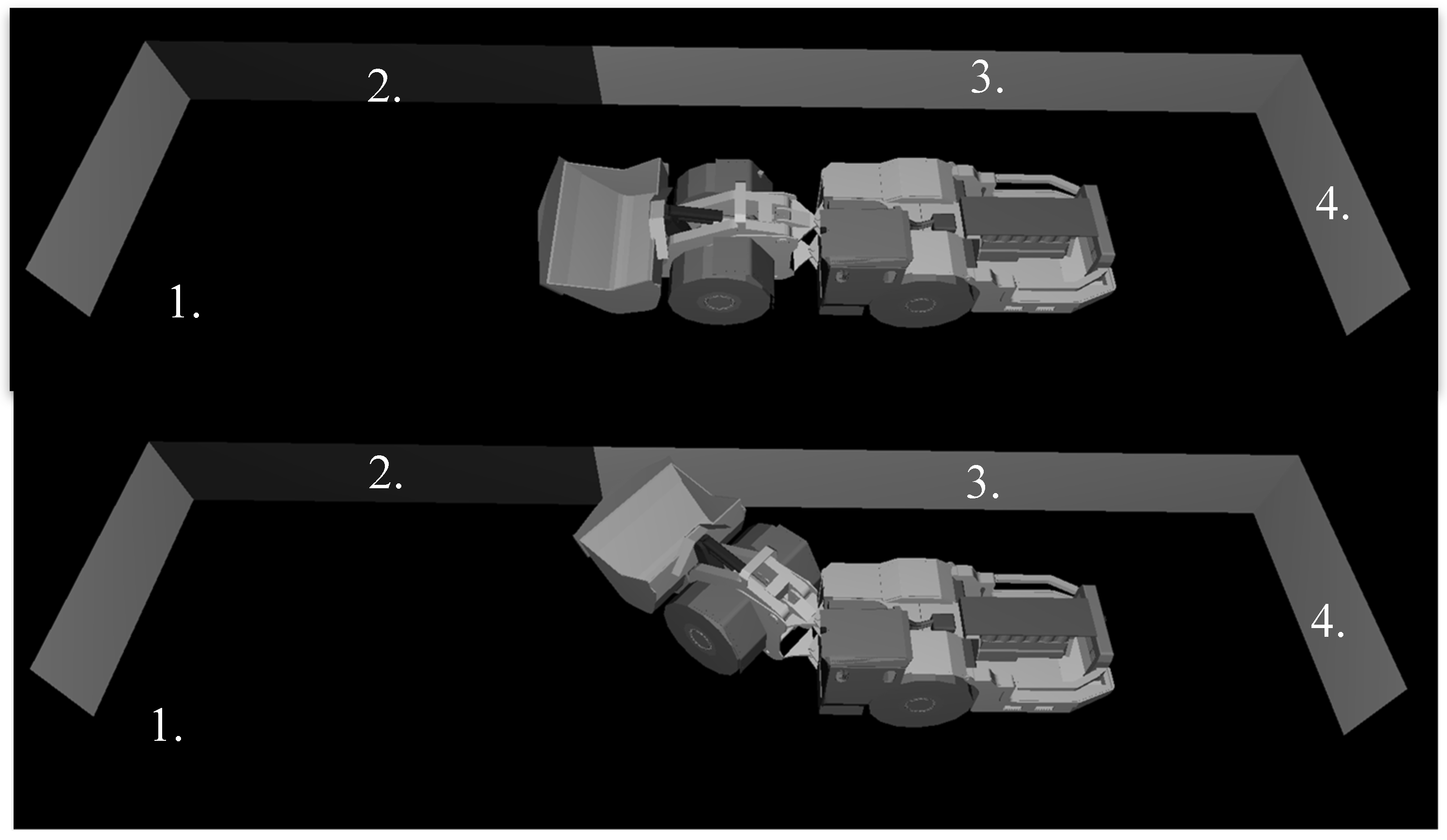
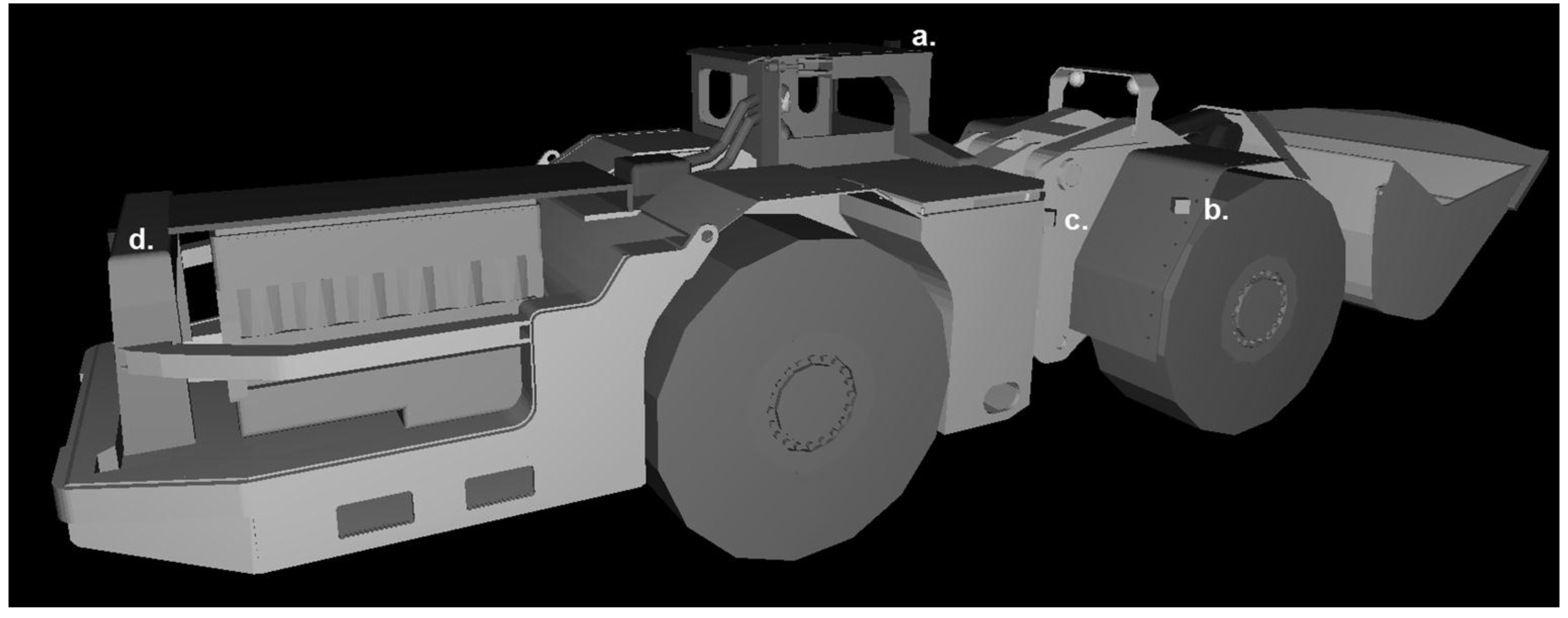
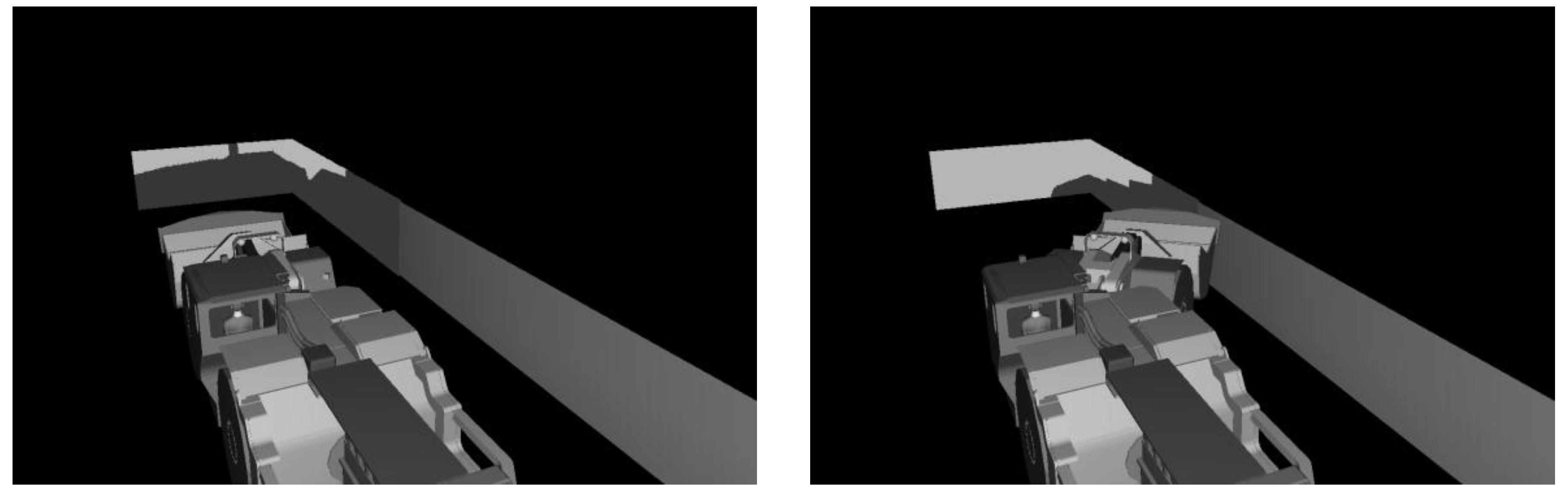
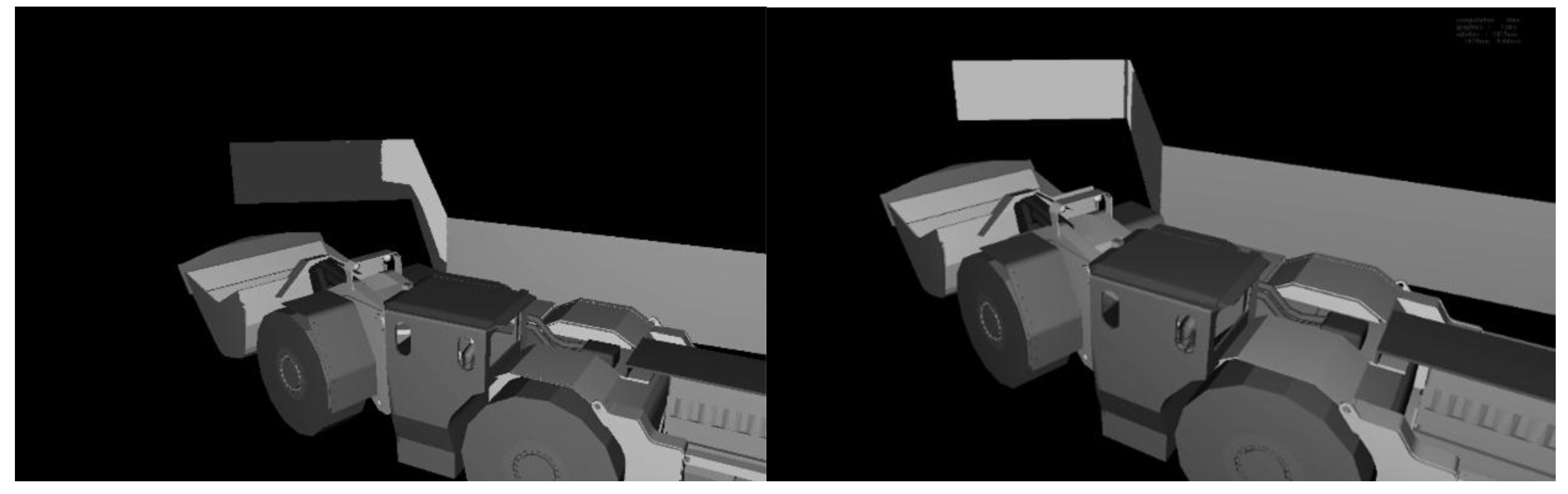
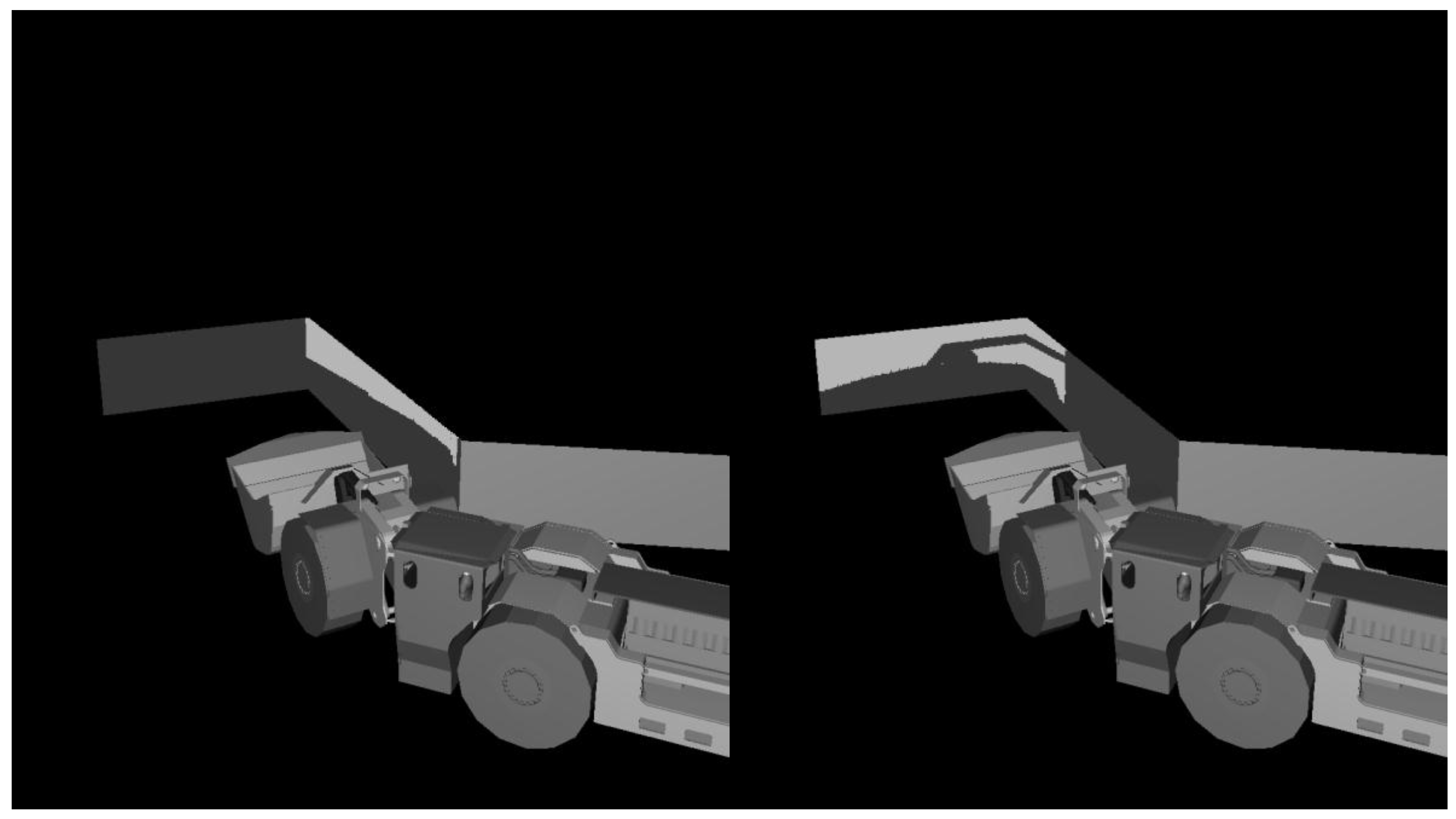
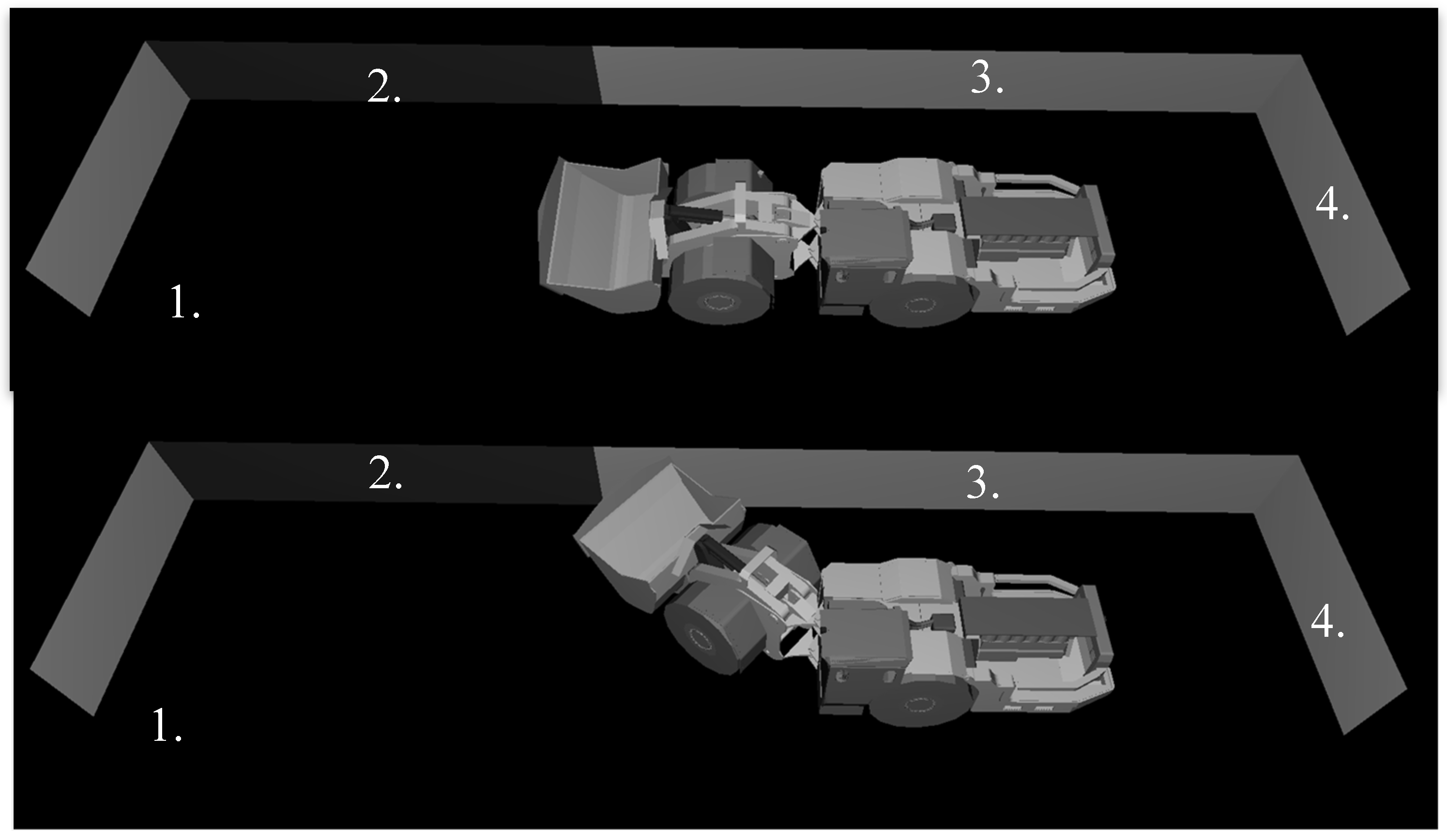
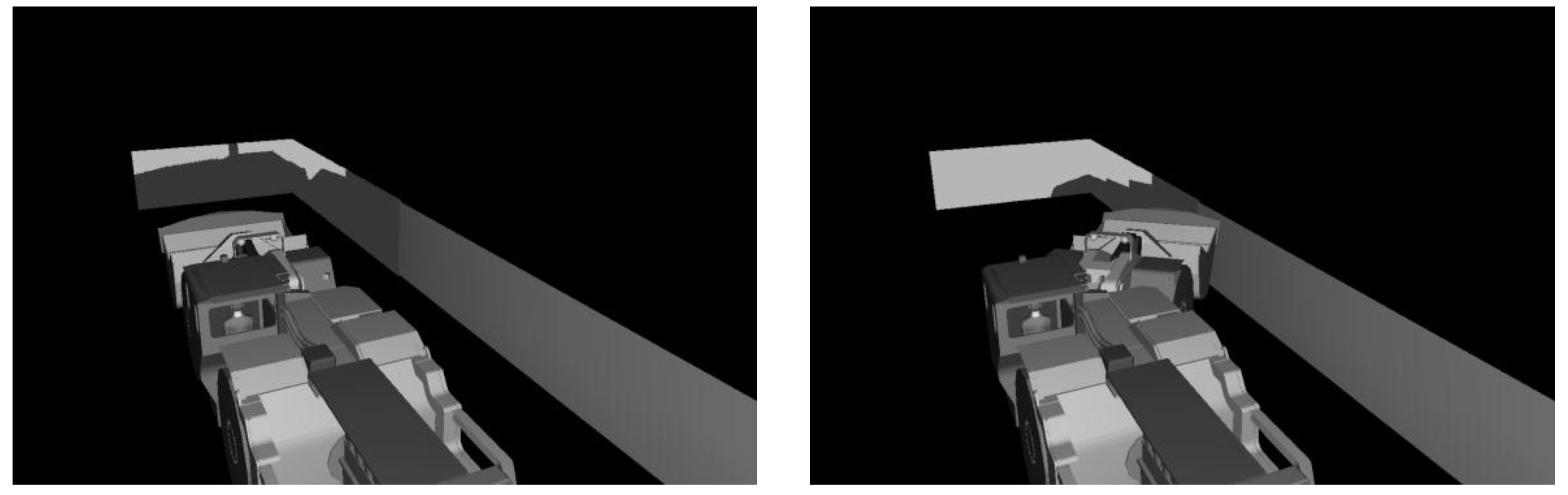
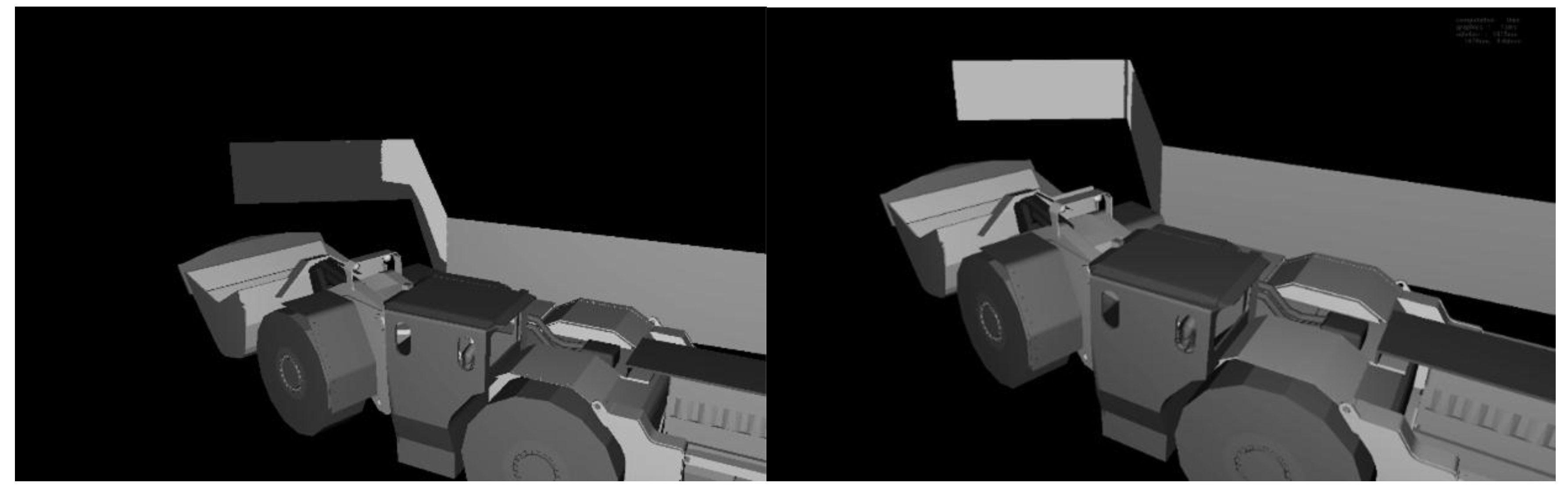
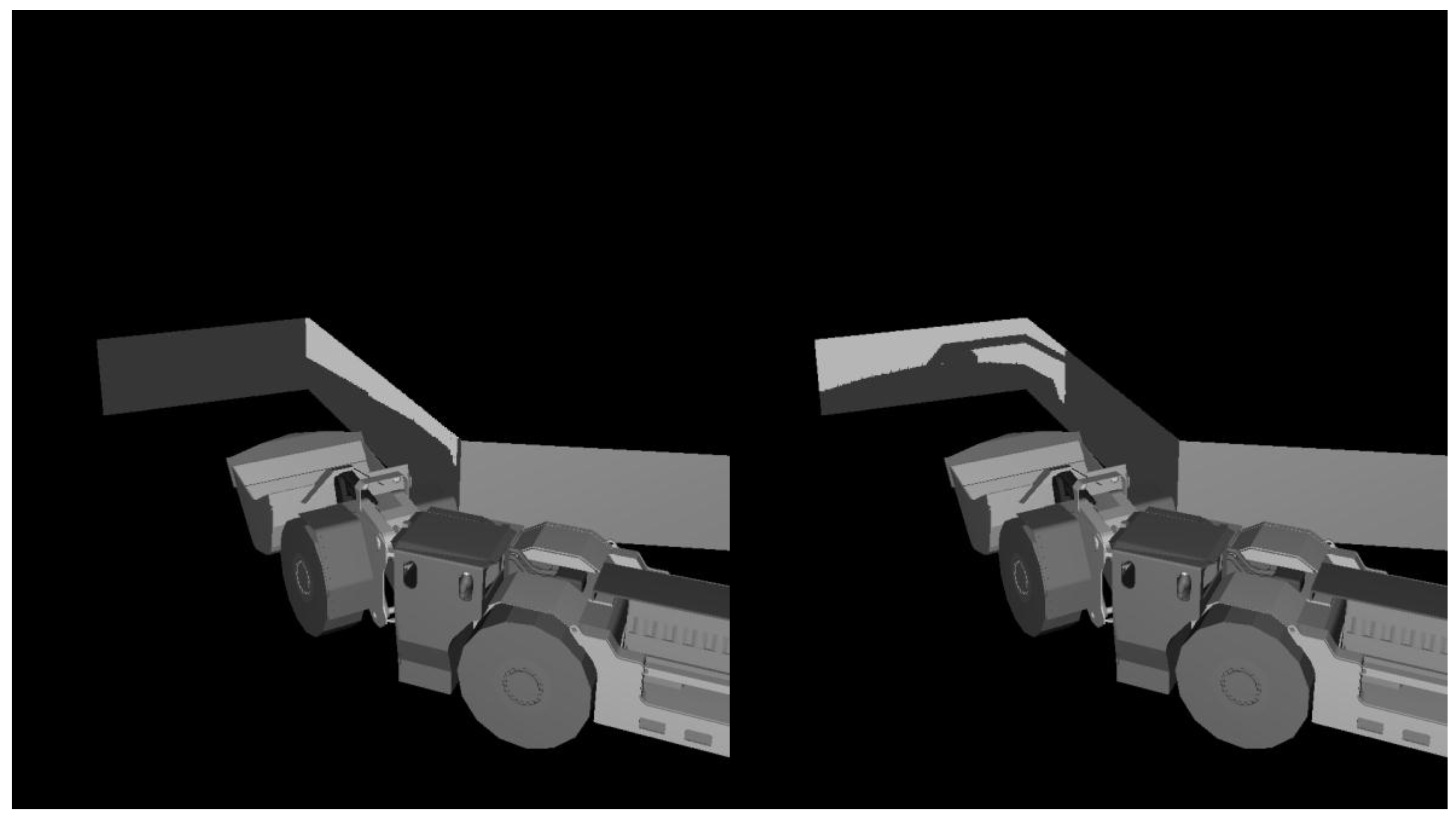
2.1. Operator and CCTV LOS in a Straight Drift When an LHD Is Straight and Articulated 38.6°
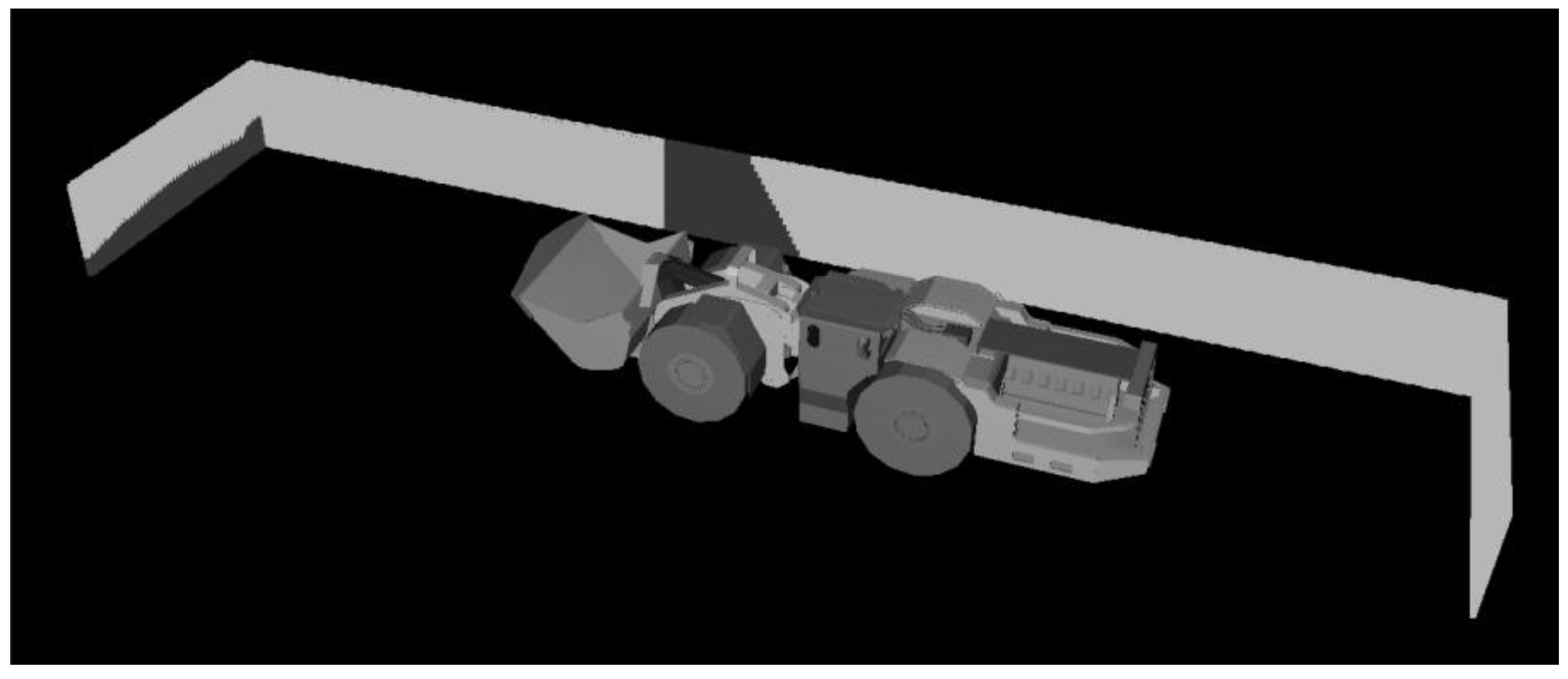
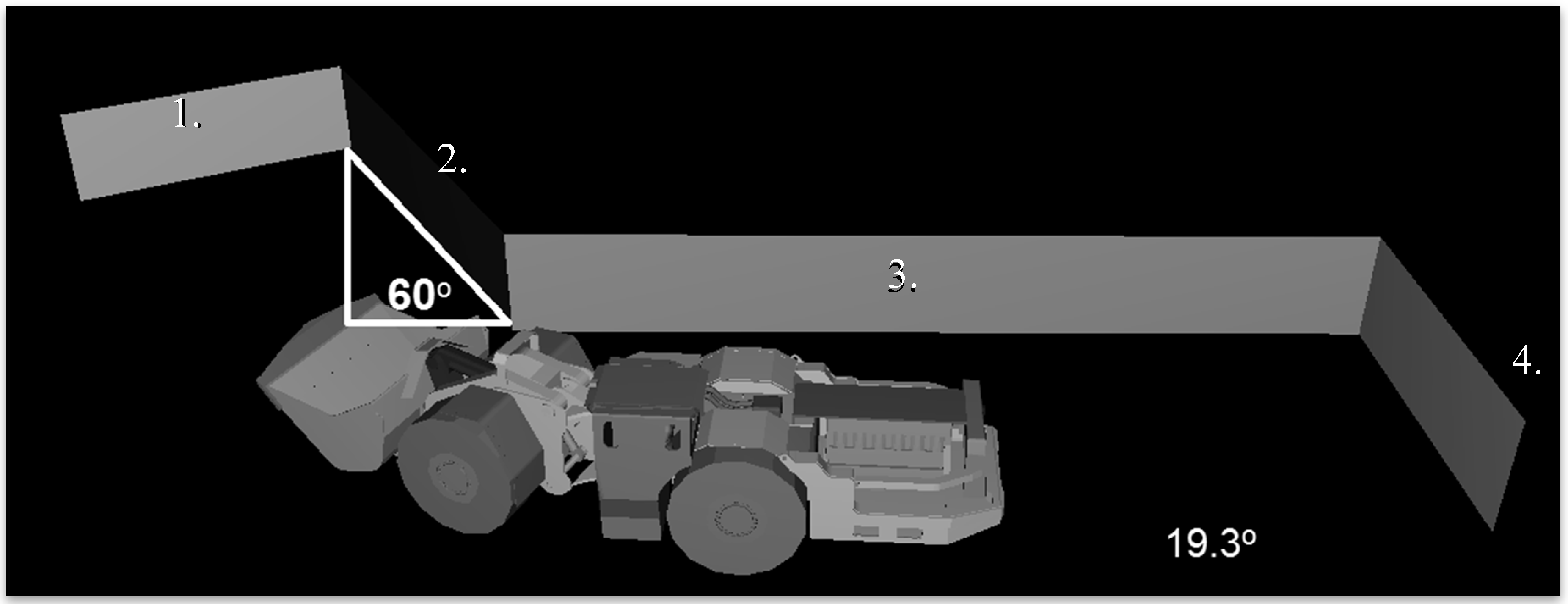
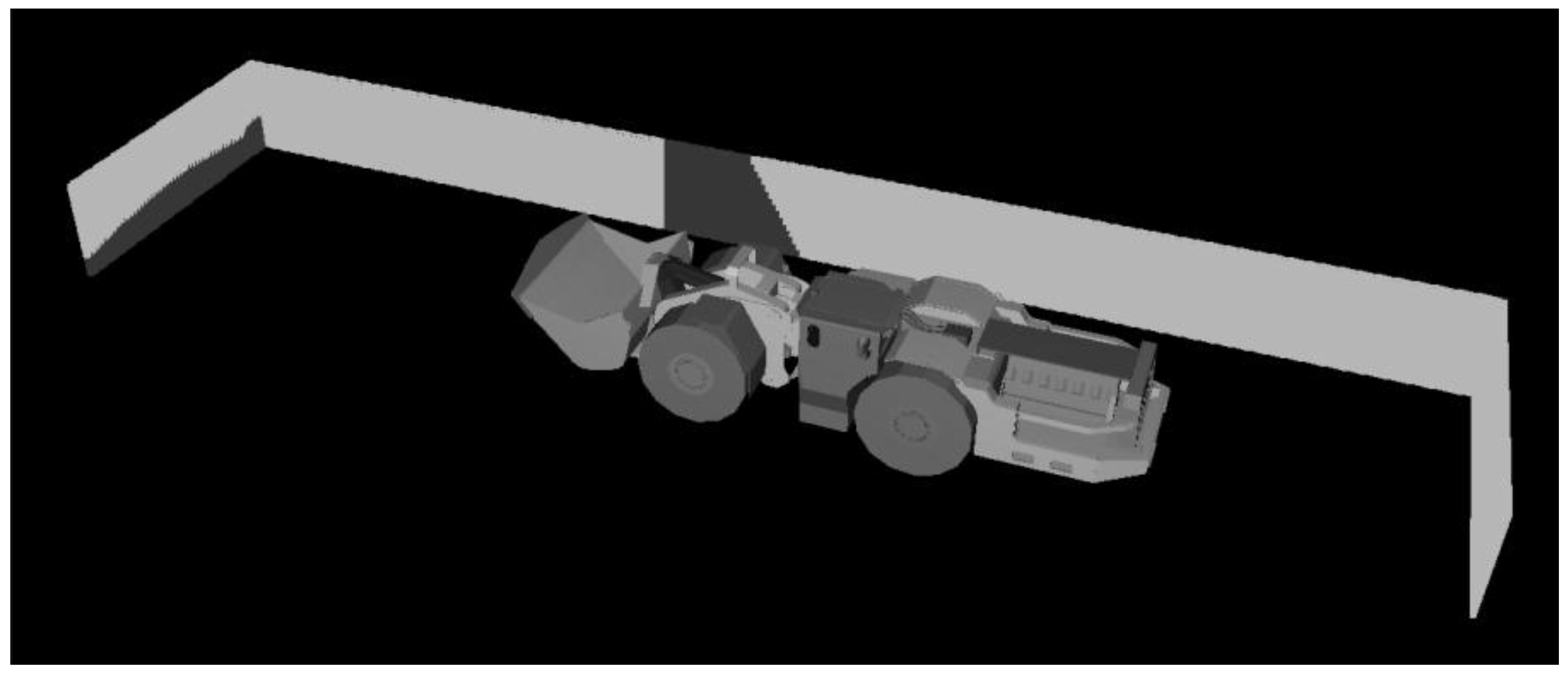
2.2. Hypothetical Operator and CCTV LOS in a 60° Drift as the Machine Turns and Articulates
3. Results
4. Discussion
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Eger, T.; Salmoni, A.; Whissell, R. Factors influencing load–haul–dump operator line of sight in underground mining. Appl. Ergon. 2004, 35, 93–103. [Google Scholar] [CrossRef] [PubMed]
- Burgess-Limerick, R. Avoiding collisions in underground mines. Ergon. Aust. 2011, 11, 1–4. [Google Scholar]
- Workplace Safety North. Pedestrian/Mobile Equipment Visibility. 2012. Available online: https://www.workplacesafetynorth.ca/sites/default/files/Pedestrian-Mobile%20Equipment%20Visibility%20-%20Technical%20Report.pdf (accessed on 26 January 2016).
- Groves, W.A.; Kecojevic, V.J.; Komljenovic, D. Analysis of fatalities and injuries involving mining equipment. J. Saf. Res. 2007, 38, 461–470. [Google Scholar] [CrossRef] [PubMed]
- Earth Moving Equipment Safety Roundtable. EMESRT—A ‘Safety by Design’ Initiative Operated by the Global Mining Industry; Earth Moving Equipment Safety Roundtable: Pinjarra Hills, Australia, 2016. [Google Scholar]
- Office of the Chief Coroner, Calvin Parkinson Inquest. 2009. Available online: http://canlii.ca/t/fzrx7 (accessed on 26 January 2016).
- The Impact of New Technology and Management of Change. Available online: http://www.labour.gov.on.ca/english/hs/pubs/miningfinal/technology.php (accessed on 26 January 2016).
- Ontario Ministry of the Solicitor General. Verdict of Coroner’s Jury—inquest into death of Bradley Ebbers; Document No CANLII 99645; Office of the Chief Coroner: Toronto, ON, Canada, 2011. [Google Scholar]
- Health and Safety Executive. Assessing Field of Vision for Operators of Earth Moving Machinery on Construction Sites; Health and Safety Executive: Liverpool, UK, 2007. [Google Scholar]
- Horberry, T. The health and safety benefits of new technologies in mining: A review and strategy for designing and deploying effective user-centred systems. Minerals 2012, 2, 417–425. [Google Scholar] [CrossRef]
- Godwin, A. Analysis of Wide and Narrow Lens PROVIX Cameras; Technical Report for PROVIX Inc.; Laurentian University: Sudbury, ON, Canada, 2014. [Google Scholar]
- Godwin, A.; Schwabe, N. Using a case study fatality to depict the limits of proximity detection systems for articulating, underground machinery. Saf. Sci. 2016, 87, 47–52. [Google Scholar] [CrossRef]
- West, J.; Haywood, M.; Dunn, P.; Eger, T.; Grenier, S.; Whissel, C. Comparison of operator line-of-sight (LOS) assessment techniques: Evaluation of an underground load haul-dump (LHD) mobile mining vehicle. J. S. Afr. Inst. Min. Metall. 2007, 107, 315. [Google Scholar]
- Godwin, A.; Eger, T. Using virtual computer analysis to evaluate the potential use of a camera intervention on industrial machines with line-of-sight impairments. Int. J. Ind. Ergon. 2009, 39, 146–151. [Google Scholar] [CrossRef]
- Eger, T.; Stevenson, J.; Callaghan, J.P.; Grenier, S. Predictions of health risks associated with the operation of load-haul-dump mining vehicles: Part 2—Evaluation of operator driving postures and associated postural loading. Int. J. Ind. Ergon. 2008, 38, 801–815. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Plane (Straight Tunnel) | Source Line of Sight | Line of Sight with No Machine Articulation | Line of Sight at 38.6° Articulation |
|---|---|---|---|
| 1 | Operator | 22% | 92% |
| Camera | 67% (a) | 45% (a) | |
| 2 | Operator | 17% | 28% |
| Camera | 100% (c) | 61% (a) |
| Plane (Corner) | Source Line of Sight | Line of Sight at Position 1 (19.3° Articulation) | Line of Sight at Position 2 (38.6° Articulation) | Line of Sight at Position 3 (19.3° Articulation) |
|---|---|---|---|---|
| 1 | Operator | 13% | 3% | 21% |
| Camera | 97% (c) | 45% (a) | 54% (a) | |
| 2 | Operator | 62% | 31% | 3% |
| Camera | 19% (a) | 18% (a) | 63% (c) |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schwabe, N.; Godwin, A. Implications of Articulating Machinery on Operator Line of Sight and Efficacy of Camera Based Proximity Detection Systems. Safety 2017, 3, 17. https://doi.org/10.3390/safety3030017
Schwabe N, Godwin A. Implications of Articulating Machinery on Operator Line of Sight and Efficacy of Camera Based Proximity Detection Systems. Safety. 2017; 3(3):17. https://doi.org/10.3390/safety3030017
Chicago/Turabian StyleSchwabe, Nicholas, and Alison Godwin. 2017. "Implications of Articulating Machinery on Operator Line of Sight and Efficacy of Camera Based Proximity Detection Systems" Safety 3, no. 3: 17. https://doi.org/10.3390/safety3030017
APA StyleSchwabe, N., & Godwin, A. (2017). Implications of Articulating Machinery on Operator Line of Sight and Efficacy of Camera Based Proximity Detection Systems. Safety, 3(3), 17. https://doi.org/10.3390/safety3030017