1. Introduction
Construction sites, characterized by significant hazards, recorded 25,705 fatalities due to occupational injuries from 1992 to 2015, averaging around 1071 deaths each year [
1,
2,
3]. Occupational injuries remain a critical issue in construction industries, highlighting the continued need for improved safety practices [
4,
5,
6]. Utility excavation is especially dangerous due to the regular interactions with underground obstacles, including pipelines and power lines [
7]. The United States has more than 20 million miles of underground utilities, and in 2018, there were around 439,000 cases of utility strikes, incurring economic expenses close to USD 1.5 billion [
8].
On construction sites, safety is generally improved by passive measures including signage, control systems, and flaggers. Nevertheless, these approaches fail to deliver fast, real-time notifications to workers near any potential hazards, especially when the hazards are visually obscured by the environment [
9]. In acknowledgment of these constraints, there has been a transition towards active safety systems capable of responding to dynamic threats, including hazard detection technologies. Recent advancements include automated hazard zone design and real-time monitoring systems that enhance safety and accident prevention on construction sites [
10,
11]. Haptic feedback systems have also been explored for improved attention management and multitasking in complex environments, demonstrating potential in both teleoperation and medical monitoring [
12,
13,
14]. Furthermore, sensory-based localization systems and human–machine interface designs have contributed to safer and more efficient operations. Magnetic sensors on excavators accurately locate underground pipelines, reducing excavation risks [
15], while remote sensing enhances wildfire risk assessment [
16]. The use of enhanced visual prompts and interface designs in teleoperation systems have been shown to improve safety and performance in complex jobsite environments [
17,
18]. These systems employ algorithms to evaluate and regulate spatial interactions among items, facilitating the identification and mitigation of possible hazards inside a location. Hazard detection is especially crucial in excavator operations, where spatial awareness is vital for safety and efficiency. For example, Shen et al. (2016) addressed the design of hazardous proximity zones around excavation equipment, stressing the importance of effective hazard-sensing in accident prevention [
10]. Teizer et al. (2015) demonstrated the application of proximity-sensing for automatic hazard detection, which could aid in the real-time recognition of collision paths for excavators, significantly lowering the risk of accidents [
11]. Shi et al. (2021) examined equipment control signals to better understand an excavator’s proximity to its surroundings, highlighting the importance of spatial awareness for safe operations [
12].
Hazard information can be conveyed to operators through various sensory channels, including visual, auditory, and tactile displays. Vibrotactile displays, in particular, have shown great potential for hazard-sensing in construction environments, where maintaining situational awareness is essential. Research supports the use of vibrotactile displays over visual or auditory displays in proximity coding. Studies show that vibrotactile displays do not increase visual workload and are particularly advantageous in complex environments where visual and auditory resources are heavily utilized. Salzer and Oron-Gilad (2012) found that directional task performance improved with the use of tactile cues, which did not increase cognitive load relative to visual or combined visual–tactile alerts [
19]. Lind et al. (2020) noted that vibrotactile feedback could reduce physical strain by offloading information to the tactile channel [
20]. Hudin and Hayward (2020) emphasized that tactile sensation is particularly beneficial in noisy environments, where auditory channels are often overloaded by communication and machinery sounds [
21]. Noise on construction sites has been shown to degrade cognitive performance and increase error rates [
22,
23]. Thus, vibrotactile feedback displays have the potential to enable workers to remain aware of physical hazards even in loud or visually obscured environments [
24]. This potential may be understood through Wickens’ Multiple Resources Theory, which posits that human cognitive processing is distributed across multiple independent channels, such as visual, auditory, and tactile modalities. By applying information through a separate sensory channel, tasks can be performed more efficiently, minimizing cognitive interference and overload [
25,
26]. MRT is particularly relevant to this study’s context because construction tasks require operators to maintain high levels of spatial awareness while simultaneously managing navigation and situational monitoring. By leveraging the tactile sensory channel, vibrotactile feedback can provide hazard proximity cues without increasing visual or auditory demands, which are already heavily taxed in these environments. This approach allows operators to efficiently allocate cognitive resources, enhancing their ability to respond to potential hazards.
Earlier research has effectively applied MRT to enhance performance and safety in multitasking scenarios. For example, Wickens (2008) demonstrated that distributing information across sensory channels reduced cognitive workload and improved task efficiency in aviation and driving contexts [
26]. Similarly, Van Erp and Van Veen (2004) applied MRT to vibrotactile in-vehicle navigation systems, showing improved situational awareness without additional visual demands [
27]. These research findings suggest the hypothesis of vibrotactile feedback, grounded in MRT, can enhance navigation performance and hazard awareness in construction-like settings by utilizing a separate sensory channel, without imposing additional demands on the visual and auditory channels.
Using the tactile sensory channel or the sense of touch for feedback may enable operators to process additional information without increasing cognitive demands on visual and auditory resources, which are often heavily utilized in construction or heavy machinery tasks. In a construction-like setting, vibrotactile displays can also play a substantial role in reducing accidents by improving situational awareness. One study explored the use of vibrotactile displays to improve safety, highlighting their ability to provide intuitive feedback while reducing the risk of accidents [
24]. Another piece of research showed that vibrotactile feedback can also promote ergonomic practices, enabling operators to maintain postures that reduce the risk of musculoskeletal disorders [
28]. Similarly, Márquez-Sánchez et al. (2021) emphasized the role of vibrotactile cues in improving situational awareness and safety in environments where visual and auditory resources are inadequate or overwhelmed [
29]. Building on this foundation, recent studies have exhibited the effectiveness of vibrotactile warning systems in enhancing hazard awareness and safety. Fang et al. (2024) developed a vibrotactile warning system integrated into safety vests, which provided real-time alerts about potential hazards in construction environments [
30]. The findings showed that vibrotactile signals significantly improved workers’ hazard awareness and response times, particularly at the sternum, shoulders, and upper back. Similarly, Marsalia et al. (2016) evaluated vibrotactile warning systems for distracted pedestrians, demonstrating improved hazard detection and avoidance behaviors [
31]. However, the study noted the importance of refining vibrotactile cues to enhance hazard detection accuracy. These advancements underline the potential of vibrotactile feedback systems to enhance situational awareness and safety in dynamic, high-risk environments.
The design of vibrotactile feedback systems has been shaped by extensive research on human sensory thresholds and tactile encoding methods. The research has also highlighted the role of temporal properties and waveform characteristics in optimizing feedback systems. Temporal features, such as interpulse intervals, have been carefully tested and refined to ensure that urgency is perceptible without inducing discomfort [
32]. Waveform characteristics, such as roughness and smoothness, play a significant role in the perception of tactile cues, while ramp-up and ramp-down configurations may not provide the clarity and reliability needed for effective feedback [
33].
Studies by Jones and Sarter (2008) and related works have shown that the optimal sensitivity for vibrotactile feedback occurs within the frequency range of 150 to 300 Hz, with fingertips exhibiting the lowest amplitude thresholds [
34,
35,
36,
37,
38]. This sensitivity underpins the use of frequencies and amplitudes that ensure that feedback signals are both perceptible and comfortable. Key dimensions such as vibration intensity, pulse duration, and pulse spacing have demonstrated effectiveness in conveying quantitative information, particularly by indicating the urgency or severity of nearby hazards. Intensity modulation provides an intuitive means of signaling urgency or severity, which can relate to the proximity of hazards, with stronger vibrations aligning with increased hazard levels [
34]. Adjusting pulse duration encodes information by utilizing temporal summation, allowing longer vibrations to enhance perception without overwhelming the user [
39]. Pulse spacing, defined by the interval between successive vibrations, adds another layer of temporal encoding. Shorter intervals effectively communicate urgency or closer proximity by leveraging rhythmic adjustments to create a sense of immediacy [
32]. Such dimensions appear promising for multitasking environments like construction, where non-visual feedback has the potential to reduce reliance on overburdened sensory channels while supporting situational awareness. By leveraging these properties, vibrotactile displays can provide intuitive, non-intrusive feedback that enhances safety and efficiency in high-demand settings.
Vibrotactile feedback has also been extensively studied for its potential to enhance multitasking performance and reduce cognitive workload across various operational contexts. Studies have shown that vibrotactile cues can effectively guide spatial navigation and goal-directed movements under dual-task conditions, although they may increase the movement completion time due to cognitive load trade-offs [
40]. Additionally, vibrotactile feedback was found to maintain postural stability but can impose cognitive costs on working memory tasks, highlighting the need to balance sensory feedback with cognitive demands in multitasking environments [
41]. Wearable vibrotactile systems have been effective in reducing collisions and decreasing the physical workload in UAV teleoperation, demonstrating the benefits of vibrotactile feedback in scenarios requiring high spatial awareness [
42]. Meta-analyses have also confirmed the effectiveness of vibrotactile displays in reducing visual overload and enhancing task performance in multitasking environments [
43]. These findings suggest that vibrotactile feedback can serve as a complementary modality to overburdened visual and auditory channels. Furthermore, studies on haptic feedback in telerobotic construction tasks have shown that real-time vibrotactile feedback about tool vibrations improves task performance and reduces perceived difficulty, highlighting its potential to enhance operator efficiency and safety in complex construction settings [
44].
Despite the proven potential of vibrotactile feedback to reduce visual and cognitive demands, its application in high-risk, multitasking environments, such as construction and heavy machinery operations, remains underexplored. Most existing studies used focused environments or specialized applications, without systematically comparing different vibration patterns for hazard proximity in multitasking scenarios. Additionally, the research primarily examined vibrotactile feedback in isolation, overlooking its interaction with the complex multitasking demands and cognitive load experienced in real-world operations. The absence of comparative studies examining multiple feedback patterns under consistent multitask conditions limits our understanding of their impact on hazard awareness and multitasking performance.
In light of the need for effective safety systems in high-risk environments, this study investigates the potential of vibrotactile feedback to improve operators’ spatial awareness when visual and auditory channels are in high demand for the task set. Building on Wickens’ Multiple Resources Theory, this research evaluates the effectiveness of vibrotactile displays integrated into a joystick controller for a multitasking control task relevant to heavy machinery operations when used to convey hazard-sensing information. The primary research questions are as follows:
How do different vibration patterns conveying hazard-sensing information impact performance in a joystick-controlled navigation task?
How is the accuracy of the spatial rotation task influenced by the vibratory feedback conditions?
How does vibratory feedback affect the overall experienced workload when performing concurrent navigation and spatial rotation tasks?
This study addressed these questions by evaluating the operator performance in a multitasking control task relevant to heavy machinery operations, incorporating vibrotactile feedback while concurrently engaging in a spatial processing task. Unlike previous studies that focused on singular or isolated tasks, this study integrated vibrotactile feedback into a joystick-controlled environment, capturing the complex cognitive load experienced during real-world multitasking. The feedback varied in encoding pattern (Intensity Modulation, Pulse Duration, and Pulse Spacing) to provide proximity cues without relying on visual or auditory resources. By systematically comparing these patterns under identical conditions, this study directly examines their impact on hazard awareness, spatial navigation, and cognitive workload. Without such feedback, the divided attention required for multitasking would make it less likely for operators to notice collisions or prolonged contact with hazards. Nonvisual feedback, on the other hand, offers real-time awareness of proximity and contact with hazards, enabling operators to more effectively allocate visual attention to secondary tasks. This study hypothesized that vibrotactile feedback would reduce obstacle hits, minimize time spent within critical proximity of hazards, and improve spatial awareness, as measured by the accuracy of the spatial rotation task, thereby alleviating cognitive workload in multitasking contexts. These findings are expected to contribute to the development of vibrotactile safety systems that enhance spatial awareness and operational efficiency in high-risk construction environments.
2. Materials and Methods
2.1. Participants
Twenty-four students from Texas A&M University, aged between 19 and 27 years, participated in this study. None of the participants had experience in construction or operating heavy machinery. Participants were recruited through university channels, including departmental announcements and recruitment emails, to provide a diverse sample of undergraduate and graduate students.
Eligible participants were required to have normal or corrected-to-normal vision and no known physical or neurological impairments that might interfere with the perception of vibrotactile stimuli or joystick operation. All participants provided informed consent in accordance with Texas A&M University’s Institutional Review Board (IRB) requirements, ensuring confidentiality and voluntary participation. This study was approved by Texas A&M University’s Institutional Review Board (IRB) under the approval number IRB2023-0676D.
2.2. Experimental Setup
The experimental setup is shown in
Figure 1. The setup consisted of a modified joystick and a touchscreen interface, allowing participants to perform a navigation task and a spatial rotation task concurrently. The apparatus and feedback conditions were designed to evaluate the effectiveness of vibrotactile feedback on task performance in a multitasking scenario.
The navigation task and spatial rotation task were selected to represent the navigation and situational awareness demands relevant to heavy machinery operations in construction environments [
7]. In the navigation task, participants used a joystick to accurately guide a cursor through a virtual environment, targeting specific points while avoiding obstacles [
45]. This setup reflected the precision and motor control required in such heavy machinery work. Simultaneously, the spatial rotation task engaged participants in visual–spatial judgments akin to monitoring surroundings for potential hazards, such as nearby workers or equipment. Together, these tasks allowed for an examination of how vibrotactile feedback supports multitasking under conditions that approximate the visual–motor coordination and environmental awareness required in operational settings.
2.2.1. Virtual Environment and Navigation Task
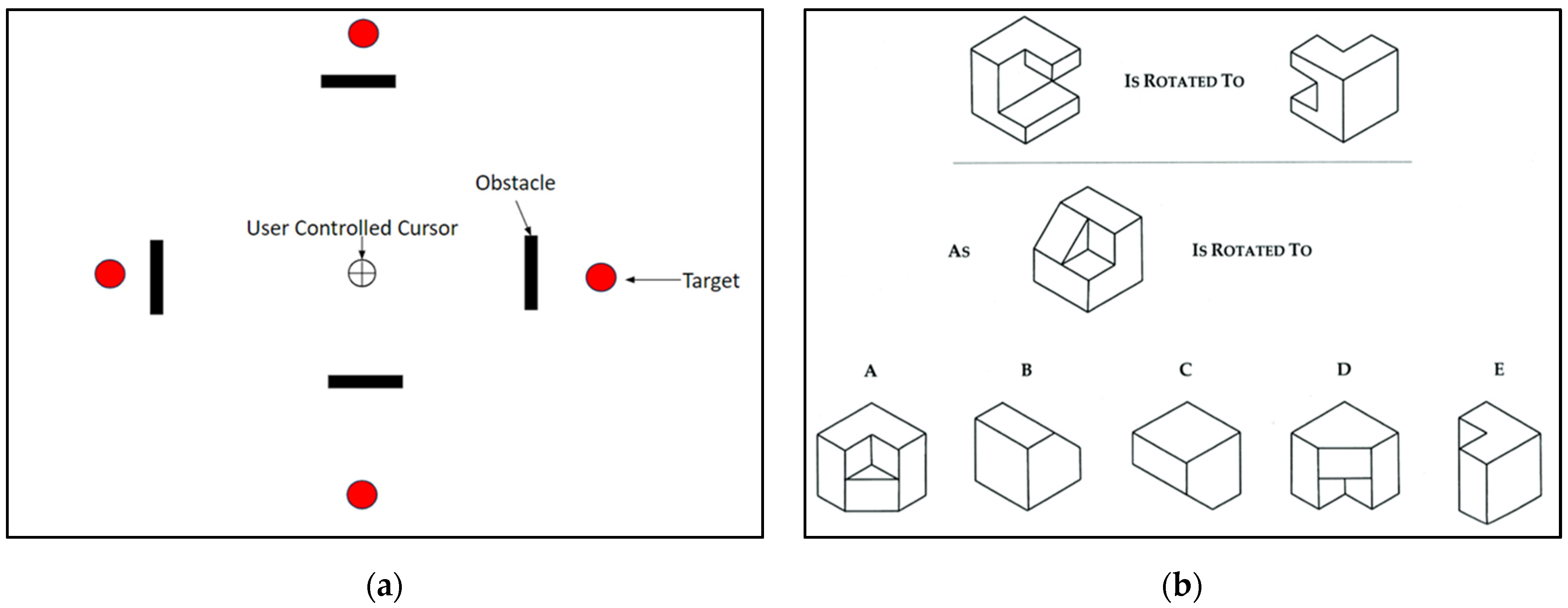
Participants used the joystick to complete a navigation task within a virtual environment displayed on a computer monitor, as shown in
Figure 2a. This task required moving a cursor across the screen to contact target locations while avoiding obstacles, reflecting the continuity and complexity of heavy machinery handling tasks in construction settings. Four targets were presented, and participants rotated the cursor between them in a continuous sequence for five minutes. The “targets” represented construction zones that operators must frequently visit in a small, confined area, such as digging locations or zones that require frequent interaction with machinery. This design reflected the ongoing workflow of the frequent operation of machinery, where operators navigate between different points, such as digging, transporting material, and dumping it at another spot. Although the task did not replicate the physical actions, it captured the cognitive demands and motor control needed for maintaining spatial awareness and navigating confined spaces.
The “obstacles” in the task represented hazards that operators need to avoid, such as underground pipelines, power lines, or other potential hazards in real-world construction sites. Just as heavy machinery operators must steer clear of these hazards to ensure safety, participants in this task had to avoid virtual obstacles while maintaining high accuracy and speed. The navigation task emphasized accuracy and speed in reaching targets without collision, where a speed–accuracy trade-off was present as participants balanced rapid movement with precise control [
46]. In conditions where vibrotactile feedback was applied, the intensity, duration, or spacing of vibration was adjusted in response to the cursor’s proximity to obstacles, providing haptic cues to assist in navigation.
Figure 2.
(
a) Navigation task; (
b) spatial rotation task [
47].
Figure 2.
(
a) Navigation task; (
b) spatial rotation task [
47].
2.2.2. Spatial Rotation Task
The spatial rotation task, shown in
Figure 2b, was included as a concurrent task to assess participants’ spatial processing abilities under multitasking conditions. This task required participants to identify the correct mirrored version of a presented three-dimensional shape from a set of four options displayed on a touchscreen. The task was inspired by the mental rotation paradigm commonly used in spatial cognition research, which examines the ability to mentally transform and recognize objects with different orientations [
47]. The shapes and selection process simulate the spatial awareness required in high-demand environments, helping to evaluate participants’ visual–spatial processing while managing the navigation task. Participants selected their responses by tapping the touchscreen, and their accuracy in this task contributed to the overall assessment of multitasking performance. Previous research has demonstrated the effectiveness of the mental rotation paradigm in evaluating spatial abilities in dynamic environments, such as interpreting complex 3D geovisualizations [
48], enhancing mental rotation skills through digital interventions [
49], and training spatial abilities for improved cognitive processing [
50]. Additionally, the use of the mental rotation paradigm in large-scale cognitive assessments highlights its effectiveness in evaluating cognitive abilities across varied populations through game-based tasks conducted in naturalistic, everyday environments [
51]. These findings support the relevance of the mental rotation paradigm for assessing the cognitive demands encountered in high-risk construction tasks.
2.3. Apparatus
Joystick
The navigation task required participants to use a Logitech Extreme 3D Pro joystick modified with four 10 mm, 3 V, flat coin vibration motors attached to the handle (shown in
Figure 3). These motors were controlled by an Arduino Mega microcontroller to deliver different feedback patterns based on the experimental condition. The joystick was spring-centered to provide resistance, supporting controlled navigation through a virtual task environment. Feedback was localized to the participant’s hand, with motors programmed to vary the intensity, duration, or spacing of vibrations, providing proximity cues in real time.
2.4. Vibrotactile Feedback Conditions
The design of the vibrotactile feedback conditions for this study was based on a systematic process of pilot testing and refinement. The initial stage involved generating a range of waveform types and configurations to explore different sensations and determine which patterns would be most effective in a multitasking environment.
Vibrotactile Feedback Design and Selection Process
The vibrotactile feedback conditions in this study were developed through a systematic process of selection, refinement, and pilot testing. The initial design included 14 waveform patterns, each crafted to produce distinct tactile sensations. These patterns ranged from simple pulses, such as a strong click and sharp buzz, to more complex gradual intensity patterns such as ramp-up and ramp-down, tested for both smooth and sharp transitions. Each waveform was evaluated for its potential to provide clear and comfortable feedback cues in continuous navigation tasks, ensuring that each pattern could deliver relevant proximity information in an intuitive manner [
33].
A pilot test was conducted to narrow down the waveform selection and identify the patterns most suited for multitasking environments. Using pairwise comparisons, participants evaluated waveforms based on clarity and distinctiveness, with less effective patterns eliminated through successive rounds. Refinements included testing variations in intensity, pulse duration, and spacing. Intensity was adjusted in incremental steps, while pulse durations and spacings were tested over intervals ranging from 250 milliseconds to 2000 milliseconds. Adjustments were informed by prior research indicating that exponential changes in tactile parameters, such as intensity and duration, are often more noticeable and effective than linear changes [
32]. A psychophysical method of limits was employed, where participants indicated noticeable changes as parameters were modified, confirming the reliability and clarity of the selected feedback patterns.
Following this iterative process, three distinct feedback conditions were chosen: Intensity Modulation, Pulse Duration, and Pulse Spacing, alongside a baseline No Vibration condition. In the Intensity Modulation condition, vibration intensity increased as distance from obstacles decreased, providing alerts for nearby hazards [
52]. Pulse Duration involved longer vibration pulses as the cursor neared obstacles, leveraging temporal summation to heighten urgency while maintaining participant comfort [
39,
53]. Pulse Spacing reduced the interval between successive pulses as proximity decreased, creating a rapid and rhythmic sensation to convey increasing hazard severity [
32,
54].
The vibrotactile feedback conditions were programmed and modulated using an Arduino microcontroller, allowing for precise control over vibration intensity, pulse duration, and spacing. This implementation enabled the consistent and reliable delivery of tactile cues corresponding to the cursor’s proximity to obstacles in the virtual environment.
2.5. Dependent Measures
Several dependent measures were collected to assess participants’ performance and cognitive workload across the different vibrotactile feedback conditions. These measures were chosen to capture both objective performance metrics in the navigation and spatial rotation tasks and subjective evaluations of cognitive workload and feedback comfort.
2.5.1. Navigation Task Performance
Performance in the navigation task was assessed through three primary metrics: target hits, obstacle collisions, and time spent in contact with obstacles. Target hits reflected successful movements to designated points within the virtual environment, indicating navigational accuracy. Obstacle collisions measured the number of times the cursor contacted obstacles, capturing participants’ ability to avoid hazards. Critical proximity time provided an additional metric of navigational precision, quantified as the duration spent within a high-risk zone near obstacles or hazards, where the potential for collision or a safety compromise is heightened. This does not necessarily indicate direct contact with the hazard; rather, it includes both moments of very close proximity and instances of actual contact. Participants experienced the highest intensity of vibrotactile feedback during these moments of heightened risk, supporting rapid awareness and response.
2.5.2. Spatial Rotation Task Performance
Accuracy in the spatial rotation task was recorded to evaluate participants’ spatial processing abilities while multitasking. Participants’ selections on the touchscreen were used to calculate the percentage of correct responses, with higher accuracy indicating better spatial awareness and task performance under each feedback condition. This task was self-paced, allowing participants to immediately start a new trial upon completing the previous one. On average, participants completed approximately 12–15 trials per condition, indicating continuous engagement with spatial awareness demands throughout the experiment.
2.5.3. Cognitive Workload (NASA-TLX)
After each trial, participants completed the NASA Task Load Index (NASA-TLX) to gauge their perceived cognitive workload [
55]. This subjective measure included six subscales—mental demand, physical demand, temporal demand, performance, effort, and frustration—which participants rated on a scale from low to high. The NASA-TLX scores provided insights into the mental and physical demands associated with each feedback condition, allowing for comparisons of perceived workload.
2.5.4. Post-Task Questionnaire
At the end of each feedback condition, participants provided qualitative feedback on the comfort and effectiveness of the vibrotactile feedback patterns. Open-ended questions allowed participants to express any discomfort experienced, any strategy followed for completing both tasks, and suggestions for improvement. This feedback was used to gain additional insights into participants’ subjective experiences and preferences for each vibration pattern.
2.6. Procedure
Each participant followed a structured procedure designed to ensure familiarity with the tasks and consistent data collection. The entire experiment, including training and data collection, took approximately one hour per participant.
In the training phase, participants were first briefed on the study’s objectives and introduced to the experimental apparatus, including the modified joystick and touchscreen interface. To minimize the learning effects, participants initially practiced each task separately. They began with the navigation task, using the joystick to control a cursor within a virtual environment, aiming to reach targets while avoiding obstacles. This practice helped them adjust to the joystick’s control requirements. They then practiced the spatial rotation task on a touchscreen, where they identified the correct mirrored version of a presented 3D shape. This step familiarized participants with the touchscreen interface and the nature of the spatial judgments required. Following these individual training sessions, participants engaged in a five-minute multitasking session, performing both tasks concurrently to simulate the experiment’s conditions. Participants were not specifically trained on the vibration conditions, as the condition order was randomized for each participant during the experimental trials. Additionally, there were no criteria for passing the training phase, and participants were not required to demonstrate an accurate interpretation of the signals during the navigation task prior to advancing to the experimental trials.
After training, participants proceeded to the main experiment, which involved multiple trials under each of the four vibrotactile feedback conditions: No Vibration (baseline), Intensity Modulation, Pulse Duration, and Pulse Spacing. Conditions were presented in a balanced order to prevent order effects. In each trial, participants performed the navigation and spatial rotation tasks concurrently under one feedback condition. Following each trial, participants completed the NASA Task Load Index (NASA-TLX) to assess the cognitive workload, along with providing qualitative feedback on the vibration pattern’s comfort and effectiveness.
To mitigate fatigue, participants were offered a short break after two sets of trials. This pause was intended to maintain consistent performance levels throughout the session. Additionally, the starting feedback condition was randomized for each participant to counterbalance potential order biases. Upon completion of the experiment, participants were debriefed and compensated for their time according to university guidelines.
2.7. Data Analysis
Data analysis was performed in R. Repeated measures ANOVA was used to examine differences in navigation task performance (target hits, obstacle collisions, and critical proximity time), spatial rotation task accuracy, and NASA-TLX workload scores across the four feedback conditions. Statistical significance was set at 0.05.
3. Results
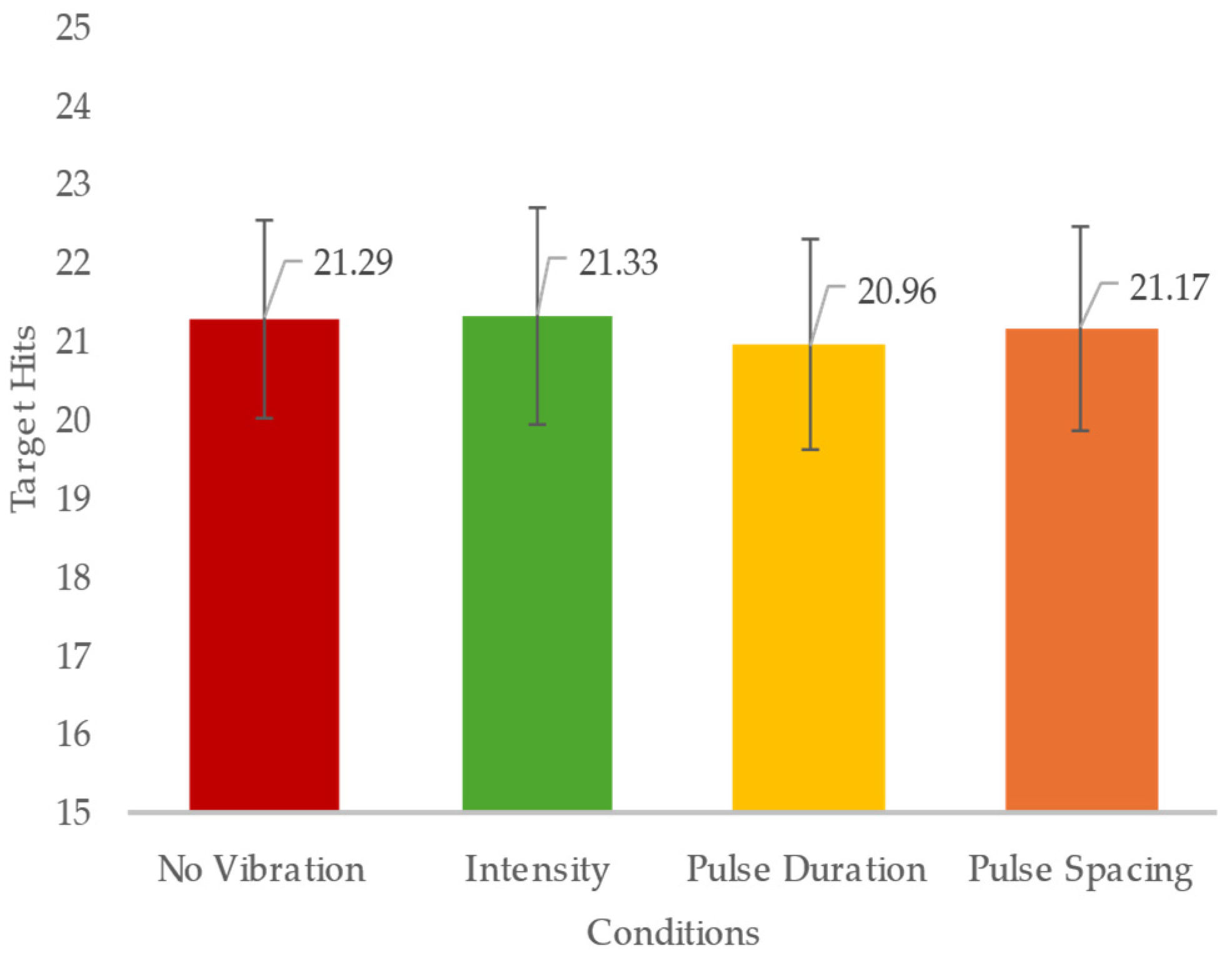
The impact of four distinct vibration conditions on navigation task performance was quantitatively assessed, as shown in
Figure 4 and
Figure 5, representing the mean values for target hits, obstacle hits, and critical proximity time. A one-way ANOVA revealed no significant differences in target hits across the conditions, with F(3, 69) = 0.237 and
p = 0.871, indicating that target hits remained consistent irrespective of the vibration condition.
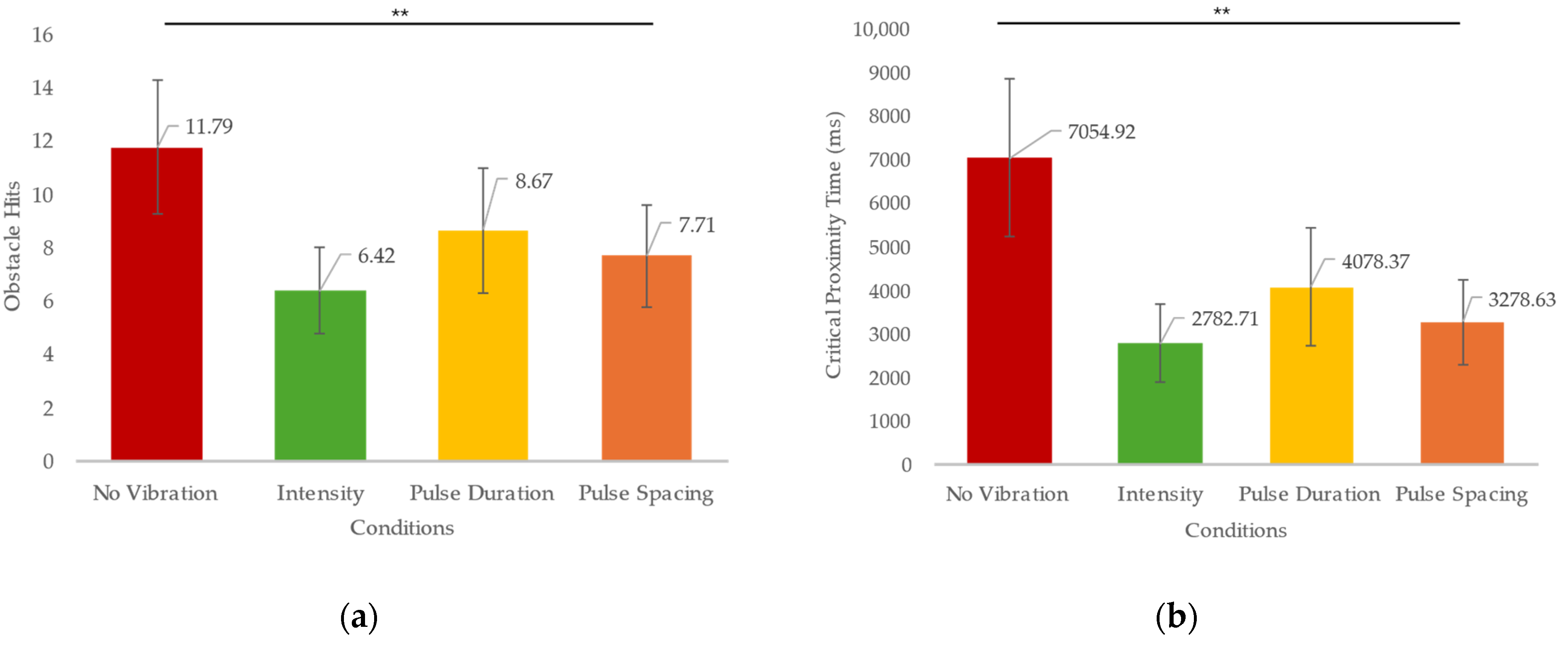
In contrast, the number of obstacle hits was significantly affected by the vibration conditions, as shown in
Figure 5a. The one-way ANOVA showed a significant effect, F(2.11, 48.52) = 5.502,
p = 0.006, η
2 = 0.037. Notably, the ‘No Vibration’ condition resulted in a higher number of obstacle hits compared to other conditions, with fewer hits in the ‘Intensity’ condition (M = 6.42) versus ‘No Vibration’ (M = 11.79,
p-adjusted = 0.015). No other significant differences among the means were observed.
The time participants spent within critical proximity to obstacles also varied significantly with different vibration conditions, as depicted in
Figure 5b. A one-way ANOVA found significant differences: F(1.51, 34.83) = 5.82;
p = 0.011; η
2 = 0.011. Post-hoc analysis showed that the ‘Intensity’ condition significantly reduced critical proximity time (M = 2782.7 ms) compared to the ‘No Vibration’ condition (M = 7054.9 ms;
p-adjusted = 0.034), with no other significant variations noted.
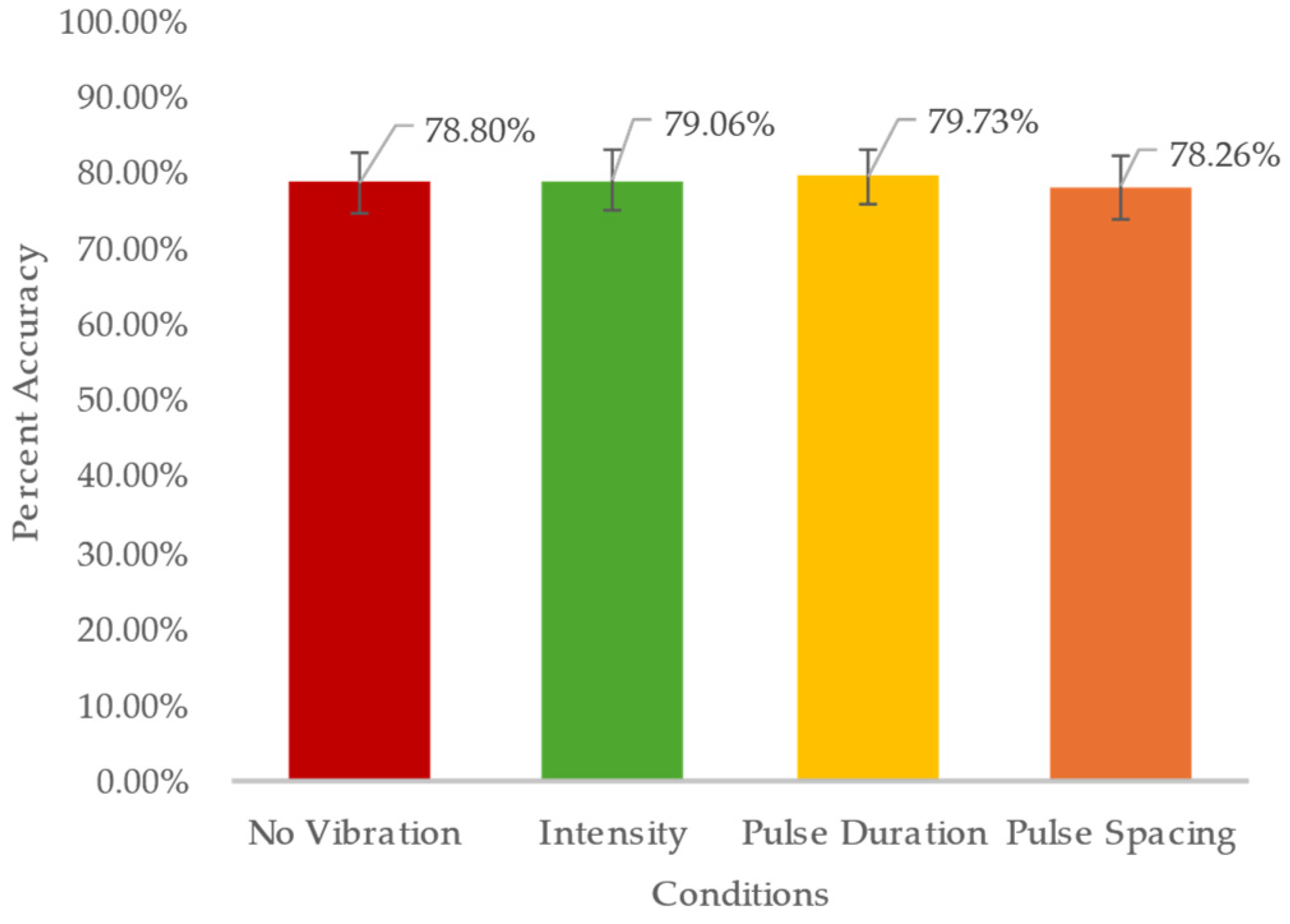
In assessing the performance of the spatial rotation task, the accuracy of the attempts was measured, as depicted in
Figure 6. The one-way ANOVA conducted for mean attempts showed no significant differences across the various vibration conditions, F(3, 69) = 0.105,
p = 0.957. Therefore, despite the varying vibration conditions, the accuracy of the spatial rotation task remained consistent across all conditions. This lack of significant variation suggests that the vibration conditions did not impact the participants’ ability to perform the spatial rotation task.
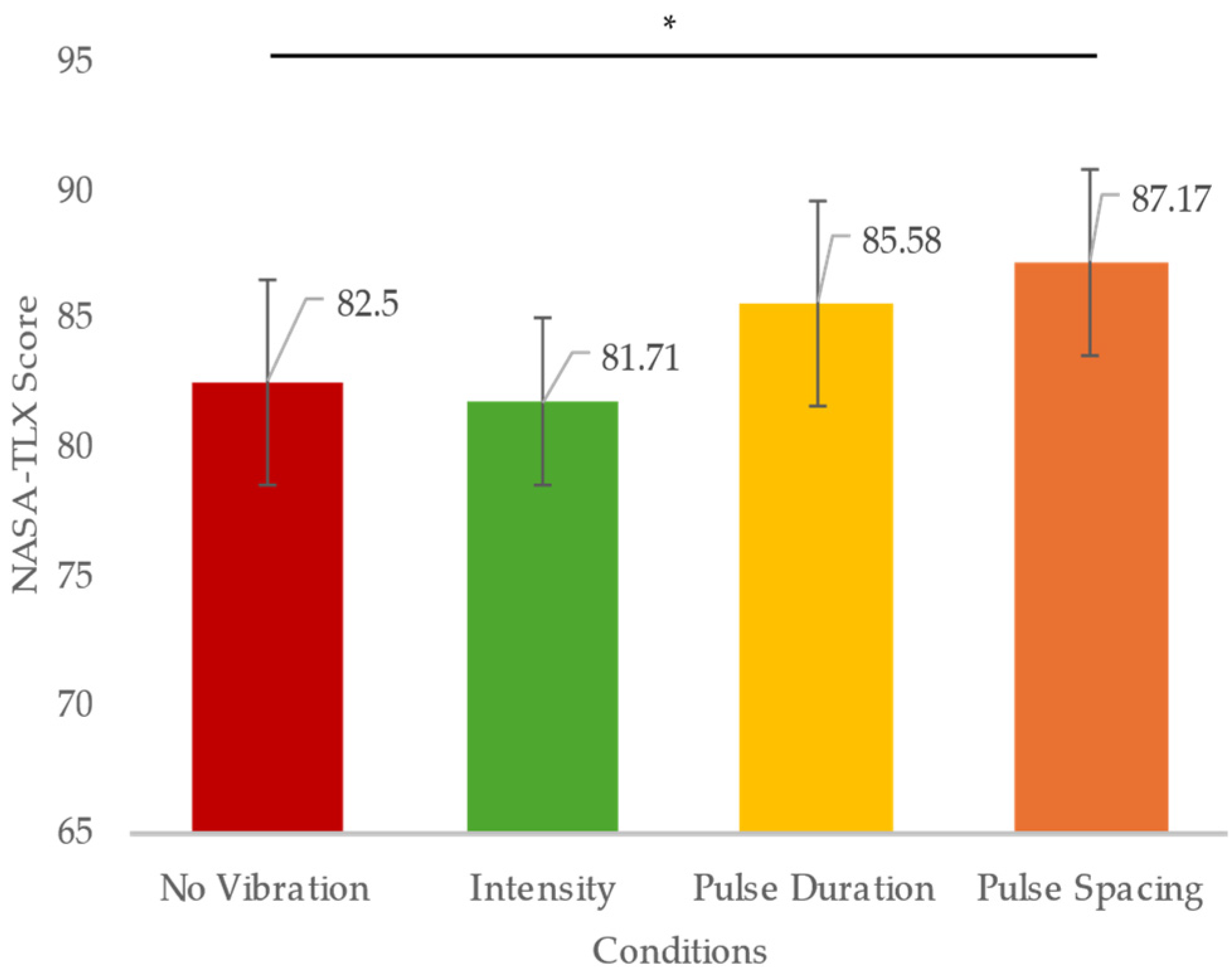
Lastly, perceived workload, gauged through NASA-TLX scores and depicted in
Figure 7, was significantly influenced by vibration conditions: F(3, 69) = 3.175;
p = 0.029; η
2 = 0.018. Despite this finding, post hoc analyses did not discern any particular vibration condition as being significantly different from others in terms of perceived workload among participants.
The post-experiment questionnaire included two key inquiries. The first asked participants to identify from the NASA-TLX which dimensions they felt were most impactful to their overall workload. The second was an open-ended question, which invited participants to describe any strategies they developed to help complete the dual tasks more effectively. The majority of participants identified Mental Demand as the most influential factor contributing to their overall workload. In response to the open-ended question, participants reported strategies for managing the concurrent demands of the navigation and spatial rotation tasks, providing insight into the observed statistical results. Many participants focused on the spatial rotation task during moments when the navigation task required minimal attention, such as while moving the cursor between targets. This approach may explain why spatial rotation accuracy remained consistent across vibration conditions, as participants allocated more cognitive resources to this task during less demanding navigation phases. Additionally, some participants indicated that they moved the cursor more slowly in the navigation task to maintain accuracy and reduce obstacle hits, particularly under vibrotactile feedback conditions. These strategies highlight how participants adapted their behavior to balance the task demands, potentially mitigating the full impact of vibrotactile feedback on performance metrics.
4. Discussion
The current study aimed to investigate the effectiveness of vibrotactile feedback in supporting multitasking performance and workload management in a simplified control environment. Operating construction machinery requires operators to maintain high levels of spatial awareness while managing multiple concurrent tasks, often under conditions where visual and auditory resources are heavily taxed. In 2021 alone, the U.S. Bureau of Labor Statistics reported 5190 occupational fatalities, with construction machinery operations being among the riskiest tasks due to the need to monitor both above-ground activities and underground hazards [
1,
8]. Given the physical and cognitive demands of such environments, vibrotactile feedback systems offer a promising solution for delivering critical proximity cues non-visually, potentially enhancing safety and efficiency. Our findings provide insight into how different patterns of vibrotactile feedback (No Vibration, Intensity Modulation, Pulse Duration, and Pulse Spacing) influence multitasking performance, including navigating to targets while maintaining spatial awareness to avoid hazards, managing additional tasks that challenge vision and spatial reasoning, and mitigating cognitive workload. These specific feedback conditions were selected based on their theoretical support in human sensory research and iterative refinement through pilot testing to ensure clear, perceptible cues without causing discomfort [
34,
56].
In the navigation task, while no significant differences were observed in target hits (
Figure 4) between the vibrotactile feedback conditions, notable improvements were found in terms of the reduced obstacle collisions and minimized critical proximity time with the obstacles (
Figure 5). The ‘Intensity’ condition, in particular, resulted in fewer obstacle hits and a reduced critical proximity time with obstacles compared to the ‘No Vibration’ condition. However, no other significant advantages were observed for the Pulse Duration or Pulse Spacing conditions, indicating that intensity-modulated feedback was uniquely effective in this context. This suggests that intensity-modulated feedback may serve as an effective cue for guiding spatial navigation around hazards, enhancing operators’ ability to avoid obstacles without relying on visual information. Such findings are consistent with prior research on tactile feedback, which highlights its potential to reduce visual demands in operational settings by providing critical spatial information through non-visual channels [
19,
32,
56,
57,
58,
59]. Intensity modulation, specifically, was noted for its capacity to deliver clear and intuitive cues, with stronger vibrations effectively signaling greater proximity to obstacles. Researchers emphasized that amplitude changes are readily perceived by the fingertips, which may make intensity-based feedback more salient in real-time applications [
34]. This aligns with the broader understanding that amplitude modulations are often associated with conveying urgency or critical information [
32]. Therefore, the findings indicate strong potential for intensity-modulated vibrotactile feedback to enhance navigational performance and hazard avoidance, particularly in high-risk construction environments where precise spatial awareness is critical.
It can be observed from
Figure 6 that the spatial rotation task showed no significant impact from vibrotactile feedback on task accuracy or the number of attempts across conditions. This stability suggests that while vibrotactile feedback can support spatial navigation tasks, it may have a limited influence on tasks primarily requiring cognitive processing. Wickens’ Multiple Resources Theory suggest that engaging underutilized and relatively available sensory channels, such as tactile feedback, can help to alleviate the sensory load on more heavily burdened channels, particularly visual and auditory channels [
25,
26]. In this case, participants’ adaptive strategies to manage the dual-task setup may have influenced the outcome. Many participants reported in post-task questionnaires that they prioritized the spatial rotation task between targets in the navigation task, where the presence of obstacles was minimal. This task-switching strategy likely contributed to maintaining a stable spatial rotation accuracy across vibrotactile feedback conditions, as participants allocated more cognitive resources to the spatial task at times when fewer demands were placed on navigation.
The results from the NASA-TLX workload assessment revealed that perceived workload did vary significantly across feedback conditions, though no one feedback type consistently reduced workload in all dimensions (
Figure 7). The mixed impact on workload may reflect the duality of tactile feedback’s role: while it can offload some cognitive demands by non-visually guiding obstacle avoidance, managing two tasks in a two-dimensional environment still required substantial mental effort, particularly given the absence of the depth cues available in real-world or VR settings. This finding is consistent with Wickens’ theory that performance benefits arise from distributing task demands across multiple sensory channels, although the limitations of a 2D environment likely moderated this benefit.
4.1. Practical Implications
The findings from this study indicate that vibrotactile feedback can improve hazard awareness and navigation performance in multitasking environments, making it a promising solution for real-world heavy machinery operations. Although further validation in operational settings is necessary, several implementation aspects could be considered.
Firstly, technical integration could involve retrofitting existing joystick controls with vibration motors or developing new haptic-enabled control systems. Calibrating the feedback to provide intuitive, context-sensitive alerts could help align tactile cues with navigation and hazard avoidance tasks. Customizing vibration patterns for specific operational scenarios, such as proximity to underground utilities or moving obstacles, may enhance the system’s effectiveness.
Secondly, interventional training programs could be developed to familiarize operators with vibrotactile alerts and their associated hazard cues. Simulation-based practice sessions may be useful for allowing operators to experience and interpret tactile feedback in a controlled environment before applying it in real-world construction tasks (e.g., excavation). This approach could help operators integrate tactile feedback into their decision-making processes, potentially improving situational awareness and operational safety.
However, several challenges need to be addressed for their successful implementation. Ensuring compatibility with diverse machinery models and maintaining reliable vibration feedback in harsh environmental conditions (e.g., dust, vibration, and extreme temperatures) may require additional technical considerations. Additionally, user acceptance and adaptability to new tactile alert systems must be assessed to ensure their smooth integration into existing safety protocols.
4.2. Limitations of the Study
Several limitations of this study should be noted, particularly in the context of sensory integration and the realism of the experimental setup. While the study investigated vibrotactile feedback in a controlled 2D environment, the absence of stereoscopic depth cues may have limited the effectiveness of spatial awareness enhancements. Previous research, such as that of Triantafyllidis et al. (2020), demonstrates that depth perception significantly improves spatial orientation and navigation accuracy, suggesting that the benefits of vibrotactile feedback might be further amplified in 3D or VR-based setups where such cues are present [
60]. This aligns with the findings from Berger et al. (2018), who identified the “uncanny valley of haptics”, where incongruences between haptic and visual inputs diminish subjective realism [
61]. In this study, the absence of dynamic, real-world elements, such as continuous movement and on-site social interaction, and the lack of construction experience further constrained the ecological validity of the results, mirroring Berger et al.’s observation that sensory congruence and contextual realism are critical for achieving effective haptic feedback [
61]. Additionally, the Vibrotactile feedback was designed as a generic alert mechanism to enhance situational awareness rather than as a directive control aid, signaling potential hazards while allowing participants to prioritize overall performance.
4.3. Future Work
Future work should explore dynamic 3D environments that incorporate stereoscopic depth, movement, and unexpected hazards to better replicate real-world conditions and ensure the seamless integration of visual and haptic stimuli for enhanced navigation and situational awareness. Additionally, expanding the study to actual construction sites would provide more realistic operational contexts, helping to evaluate the practicality and effectiveness of vibrotactile feedback in high-risk environments. This approach would also allow for assessments of user acceptance and adaptability in real-world scenarios, contributing to the development of robust safety systems for heavy machinery operations.
Future research should acknowledge that this study focused exclusively on vibrotactile feedback, and other sensory feedback modalities were not explored. It remains possible that alternative approaches, such as electro-tactile stimulation, ambient visual displays, or multimodal combinations of visual, auditory, and tactile cues, may offer similar or greater effectiveness. These modalities could provide distinct advantages in operational contexts, depending on their ability to integrate seamlessly with task demands and minimize sensory overload. Investigating such alternatives would help identify optimal feedback systems for enhancing safety and efficiency in construction and similar high-demand settings.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}