
A Joint De-Rain and De-Mist Network Based on the Atmospheric Scattering Model

Abstract
:1. Introduction
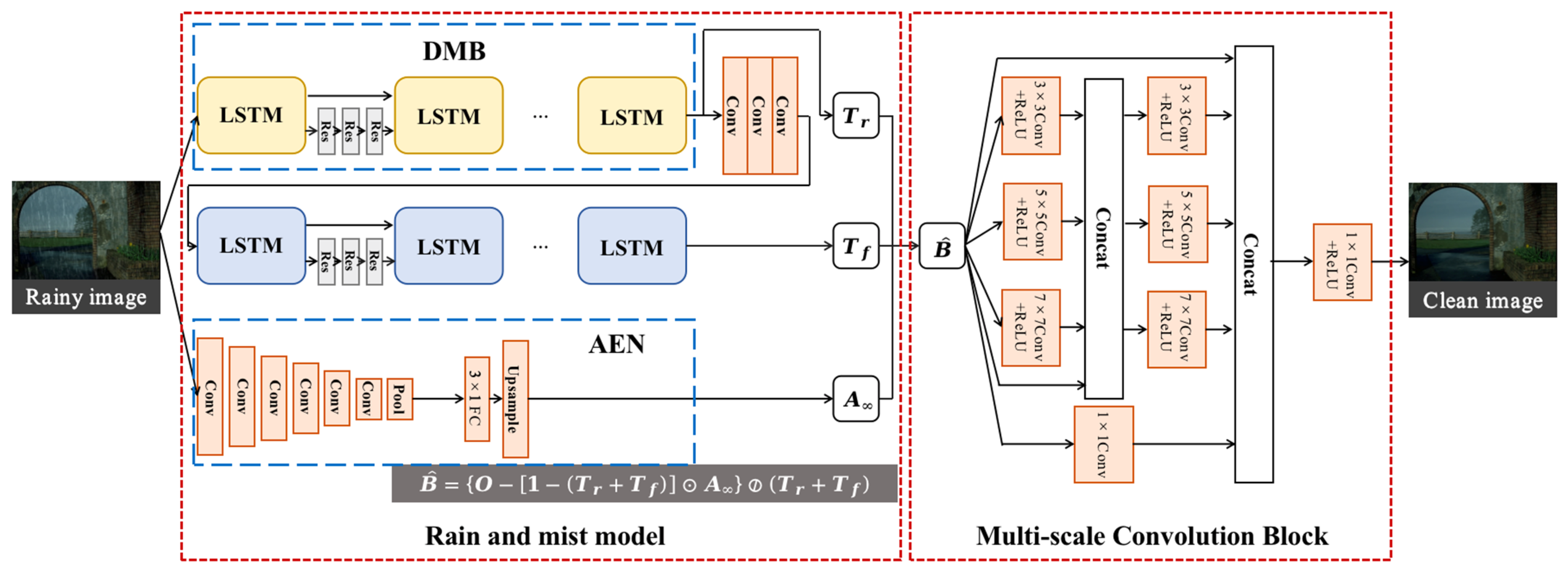
- The generation model of rainy images is reconstructed by defining rain streaks and mist as transmission media, and this model can initially remove the rain streaks and mist from the images. DMB is designed to selectively separate the rain layer and mist layer transmission spectrum in the rainy image, respectively.
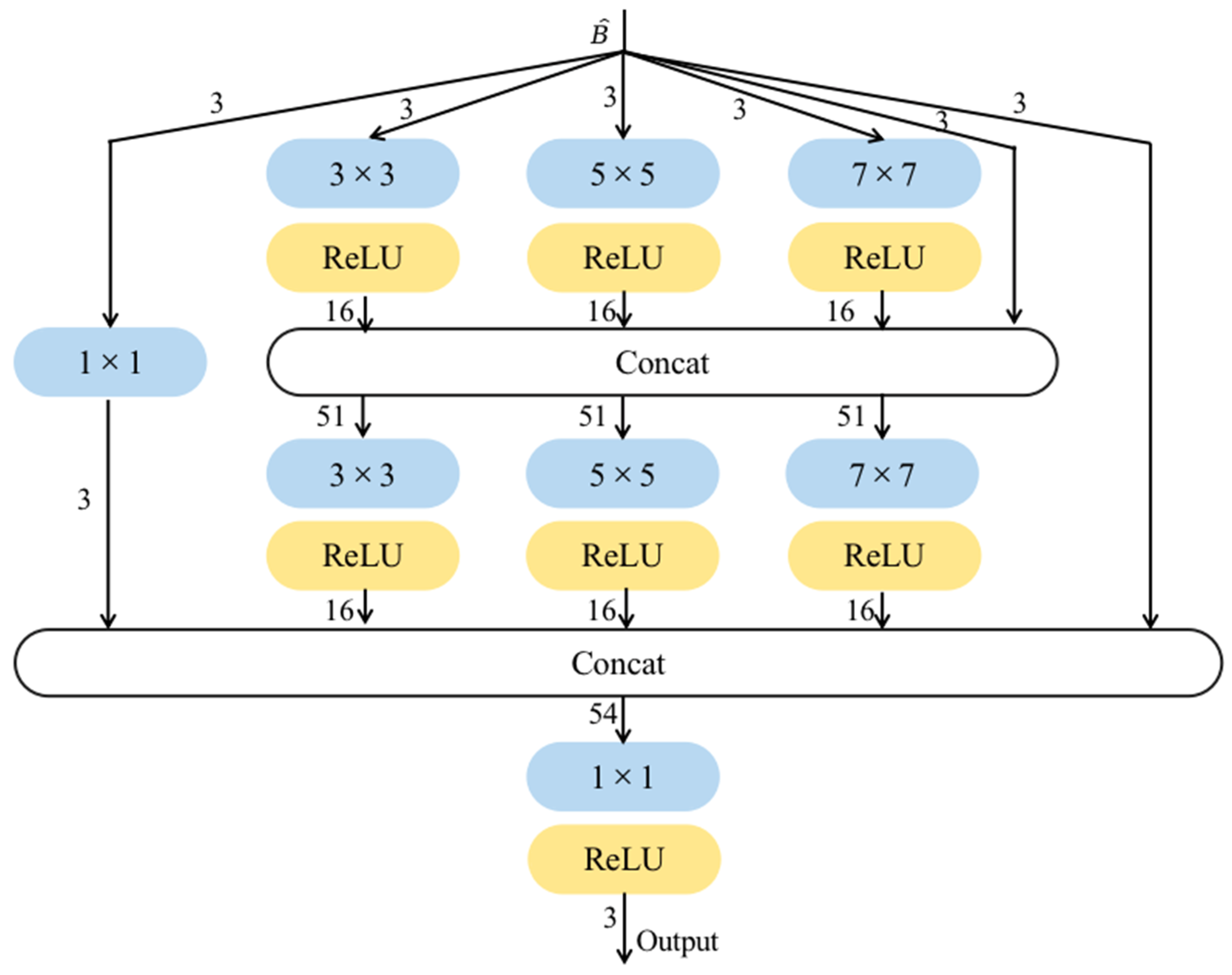
- MCB processes the reconstructed images to improve the robustness and accuracy of the model by learning more structural and detailed features which cannot be learned in the generative model.
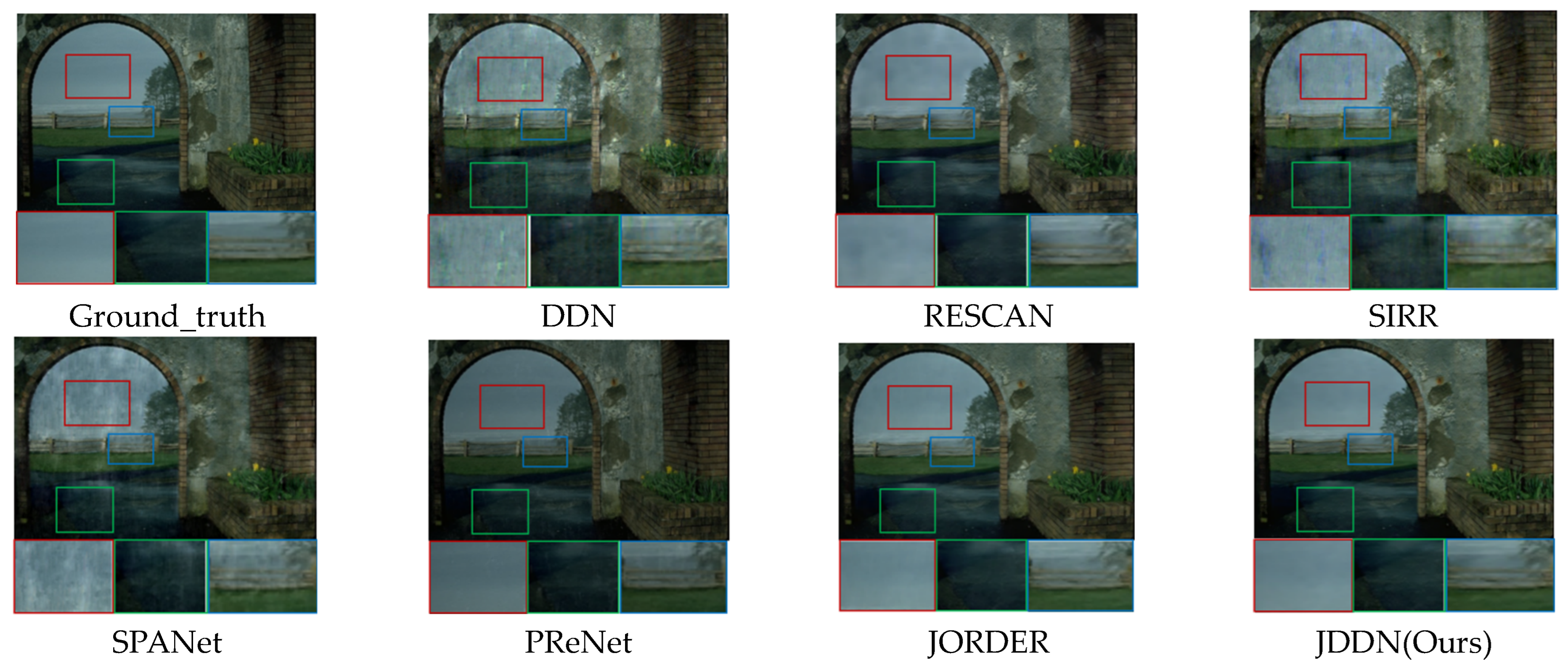
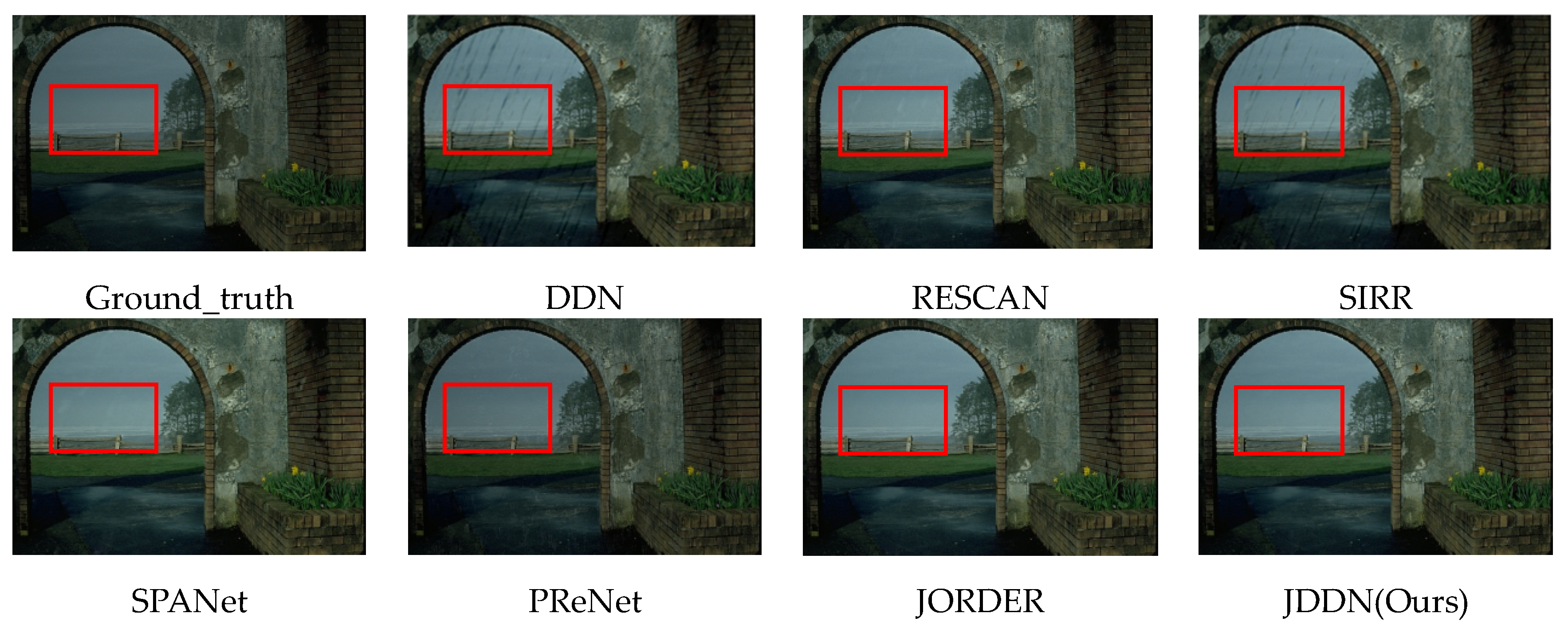
- Extensive experiments have proven that our design can produce more realistic results in the removal of rain streaks and halos, both qualitatively and quantitatively.
2. Related Work
- A.
- Rain removal models based on signal separation
- B.
- Rain removal models based on deep learning
3. Methods
3.1. Network Architecture
3.2. Rain and Mist Model Based on Atmospheric Scattering
3.3. Deep Memory Block (DMB)
3.4. Atmospheric Light Extraction Network (AEN)
3.5. Multi-Scale Convolution Block (MCB)
| Algorithm 1. Obtain the optimal parameters of the model |
| Input: The output of rain and mist model 1: for i = 1 to epoch do: 2: for j = 1 to batchnum do: 3: Convolution of by Equations (10)–(13) to get , , , . 4: Concat , , with to get . 5: Convolve with Equations (14)–(16) to get , , . 6: , , , and are convolved by Equation (17) to obtain . 7: Update the intermediate parameters by loss functions Equations (18)–(19) 8: end for 9. end for Output: The learned optimal parameters. |
3.6. Loss Function
4. Experiments
4.1. Dataset
4.2. Training Details
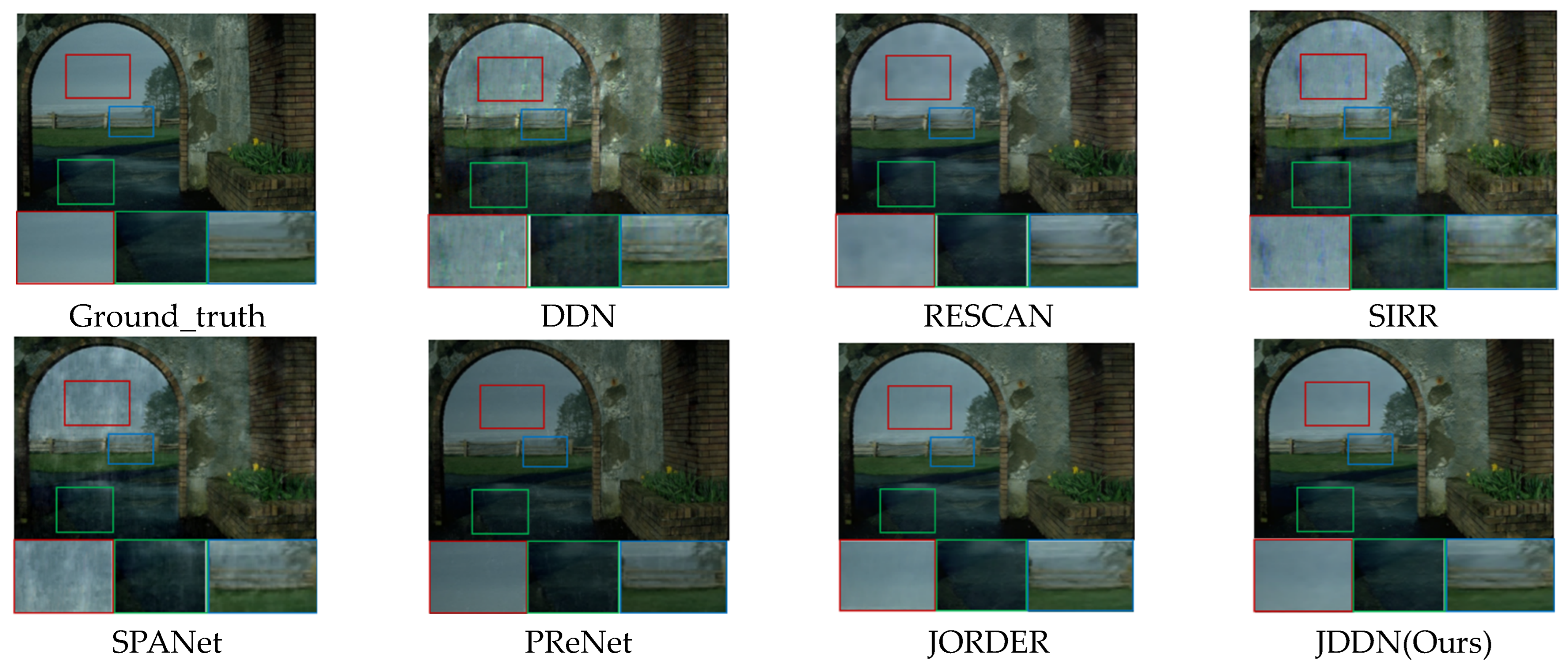
4.3. Recovery of Heavy Rain Images with Single Rain Streaks
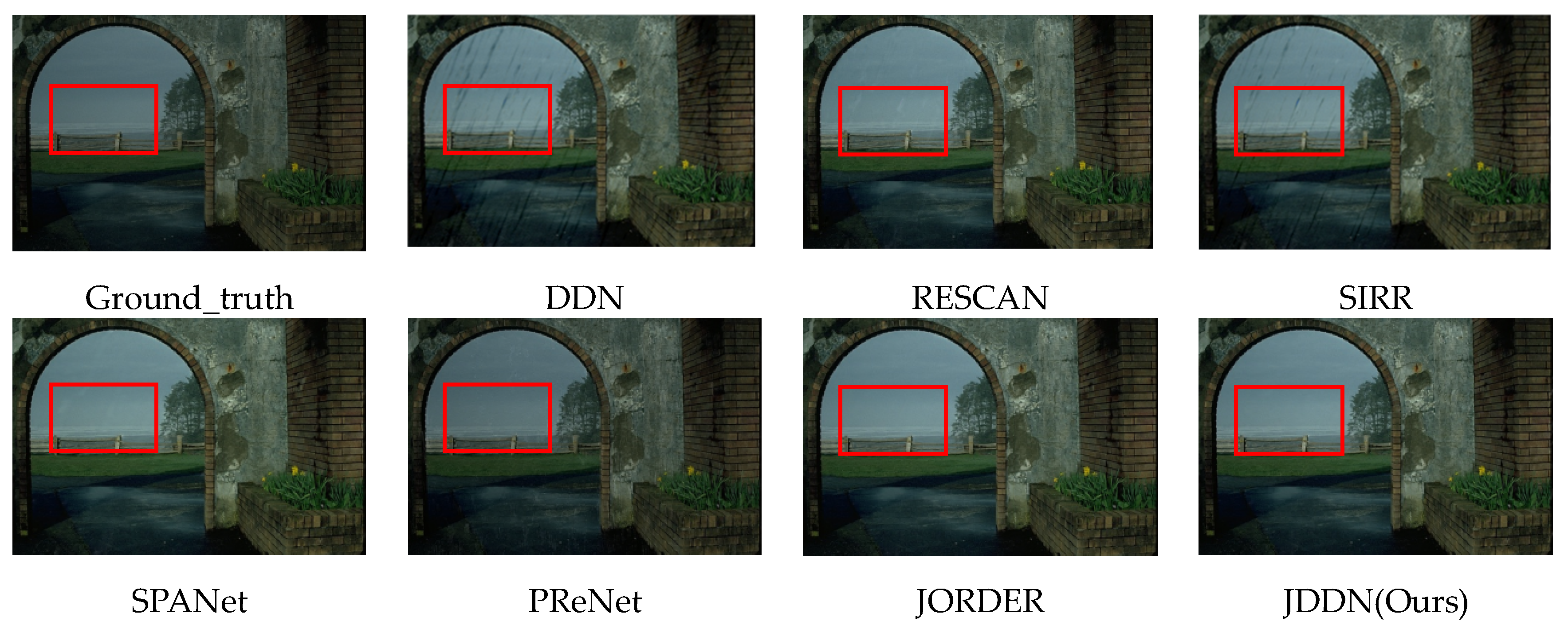
4.4. Recovery of Light Rain Images with Single Rain Streaks
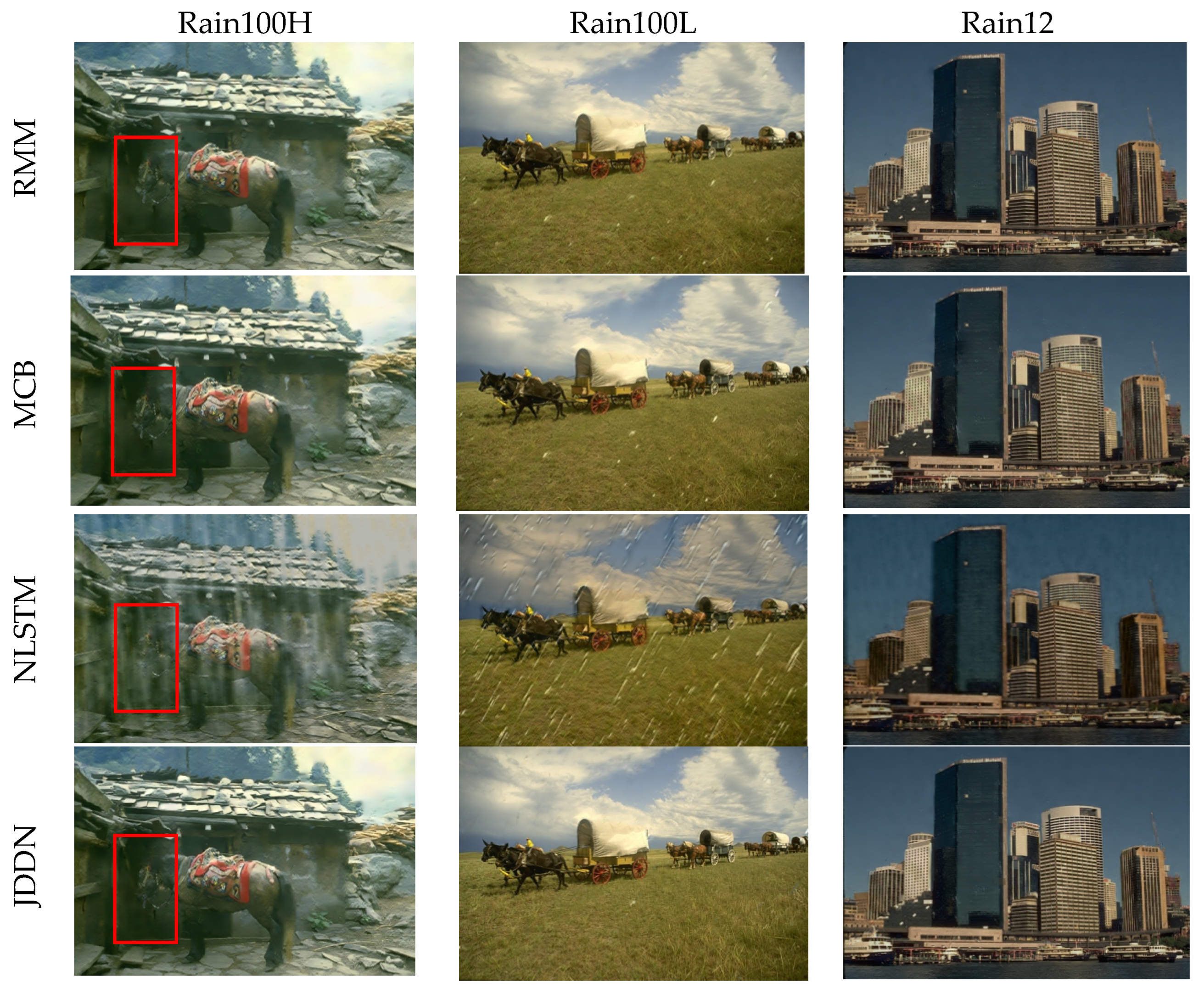
4.5. Recovery of Images Containing Multiple Types of Rain Streaks
4.6. Recovery of Real Rain Images
4.7. Ablation Experiments
5. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- He, K.; Sun, J.; Tang, X. Single image haze removal using dark channel prior. Trans. Pattern Anal. Mach. Intell. 2010, 33, 2341–2353. [Google Scholar]
- Zeiler, M.D.; Fergus, R. Visualizing and understanding convolutional networks. In Proceedings of the European Conference on Computer Vision, Zurich, Switzerland, 6–12 September 2014. [Google Scholar]
- Long, J.; Shelhamer, E.; Darrell, T. Fully convolutional networks for semantic segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 640–651. [Google Scholar]
- Sun, S.H.; Fan, S.P.; Wang, Y.C.F. Exploiting image structural similarity for single image rain removal. In Proceedings of the 2014 IEEE International Conference on Image Processing (ICIP), Paris, France, 27–30 October 2014; pp. 4482–4486. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very Deep Convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- Saxe, A.M.; McClelland, J.L.; Ganguli, S. Exact solutions to the nonlinear dynamics of learning in deep linear neural networks. arXiv 2013, arXiv:1312.6120. [Google Scholar]
- Chen, Z.; Yang, F.; Lindner, A.; Barrenetxea, G.; Vetterli, M. Howis the weather: Automatic inference from images. In Proceedings of the 2012 19th IEEE International Conference on Image Processing, Orlando, FL, USA, 30 September–3 October 2012; pp. 1853–1856. [Google Scholar]
- Fu, X.; Huang, J.; Ding, X.; Liao, Y.; Paisley, J. Clearing the skies: A deep network architecture for single-image rain removal. IEEE Trans. Image Process. 2017, 26, 2944–2956. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yang, W.; Tan, R.T.; Feng, J.; Liu, J.; Guo, Z.; Yan, S. Deep joint rain detection and removal from a single image. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 1685–1694. [Google Scholar]
- Ren, D.; Zuo, W.; Hu, Q.; Zhu, P.; Meng, D. Progressive image deraining networks: A better and simpler baseline. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 3937–3946. [Google Scholar]
- Wei, W.; Meng, D.; Zhao, Q.; Xu, Z.; Wu, Y. Semi-supervised transfer learning for image rain removal. In Proceedings of the IEEE/CVF conference on COMPUTER Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 3877–3886. [Google Scholar]
- Yasarla, R.; Sindagi, V.A.; Patel, V.M. Syn2real transfer learning for image deraining using gaussian processes. In Proceedings of the 2020 IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 14–19 June 2020; pp. 2726–2736. [Google Scholar]
- Wei, Y.; Zhang, Z.; Wang, Y.; Xu, M.; Yang, Y.; Yan, S.; Wang, M. Deraincyclegan: Rain attentive cyclegan for single image deraining and rainmaking. IEEE Trans. Image Process. 2021, 30, 4788–4801. [Google Scholar] [CrossRef] [PubMed]
- Li, R.; Cheong, L.F.; Tan, R.T. Heavy rain image restoration: Integrating physics model and conditional adversarial learning. In Proceedings of the 2019 IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 1633–1642. [Google Scholar]
- Kang, L.W.; Lin, C.W.; Fu, Y.H. Automatic single-image-based rain streaks removal via image decomposition. IEEE Trans. Image Process. 2011, 21, 1742–1755. [Google Scholar] [CrossRef] [PubMed]
- Kim, J.H.; Lee, C.; Sim, J.Y.; Kim, C.S. Single-image deraining using an adaptive nonlocal means filter. In Proceedings of the 2013 IEEE international conference on image processing, Melbourne, Australia, 15–18 September 2013; pp. 914–917. [Google Scholar]
- Luo, Y.; Xu, Y.; Ji, H. Removing rain from a single image via discriminative sparse coding. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 3397–3405. [Google Scholar]
- Li, Y.; Tan, R.T.; Guo, X.; Lu, J.; Brown, M.S. Rain streak removal using layer priors. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 2736–2744. [Google Scholar]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Shi, X.; Chen, Z.; Wang, H.; Yeung, D.Y.; Wong, W.K.; Woo, W.C. Convolutional LSTM network: A machine learning approach for precipitation nowcasting. In Proceedings of the Neural Information Processing Systems, Montreal, QC, Canada, 7–12 December 2015. [Google Scholar]
- Nair, V.; Hinton, G. Rectified linear units improve restricted boltzmann machines. In Proceedings of the 27th international conference on machine learning (ICML-10), Haifa, Israel, 21-24 June 2010; pp. 807–814. [Google Scholar]
- Wang, Y.; Song, Y.; Ma, C.; Zeng, B. Rethinking image deraining via rain streaks and vapors. In Proceedings of the European Conference on Computer Vision, Glasgow, UK, 23–28 August 2020; pp. 367–382. [Google Scholar]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fan, Z.; Wu, H.; Fu, X.; Huang, Y.; Ding, X. Residual-guide network for single image deraining. In Proceedings of the 26th ACM international conference on Multimedia, Seoul, Republic of Korea, 26 October 2018; pp. 1751–1759. [Google Scholar]
- Fu, X.; Liang, B.; Huang, Y.; Ding, X.; Paisley, J. Lightweight pyramid networks for image deraining. IEEE Trans. Neural Netw. Learn. Syst. 2019, 31, 1794–1807. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, H.; Sindagi, V.; Patel, V.M. Image de-raining using a conditional generative adversarial network. IEEE Trans. Circuits Syst. Video Technol. 2019, 30, 3943–3956. [Google Scholar] [CrossRef] [Green Version]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, Ł.; Polosukhin, I. Attention is all you need. In Proceedings of Neural Information Processing Systems, Long Beach, USA, 4–9 December 2017.
- Fu, X.; Huang, J.; Zeng, D.; Huang, Y.; Ding, X.; Paisley, J. Removing rain from single images via a deep detail network. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 3855–3863. [Google Scholar]
- Li, X.; Wu, J.; Lin, Z.; Liu, H.; Zha, H. Recurrent squeeze-and-excitation context aggregation net for single image deraining. In Proceedings of the European Conference on Computer Vision, Munich, Germany, 8–14 September 2018; pp. 254–269. [Google Scholar]
- Wang, T.; Yang, X.; Xu, K.; Chen, S.; Zhang, Q.; Lau, R.W. Spatial attentive single-image deraining with a high quality real rain dataset. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 12270–12279. [Google Scholar]
- Zhang, Z.; Wu, S.; Peng, X.; Wang, W.; Li, R. Continuous learning deraining network based on residual FFT convolution and contextual transformer module. IET Image Process. 2023, 17, 747–760. [Google Scholar] [CrossRef]
- Cao, S.; Liu, L.; Zhao, L.; Xu, Y.; Xu, J.; Zhang, X. Deep Feature Interactive Aggregation Network for Single Image Deraining. IEEE Access 2022, 10, 103872–103879. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Training Sets | Testing Sets | |
|---|---|---|
| Datasets of heavy-rain images | RainTrainH [10] | Rain100H [10] |
| RainTrainH [10] | Rain200H [10] | |
| Datasets of light-rain images | RainTrainL [10] | Rain100L [10] |
| RainTrainL [10] | Rain200L [10] | |
| Datasets of irregular rain-streak images | RainTrainH [10] | Rain12 [18] |
| Datasets of multiple types of rain streaks | Rain12600 [28] | Rain1400 [28] |
| Datasets of real-rain images | Rain12600 [28] | SPA-data [29] |
| DDN | RESCAN | SIRR | SPANet | PReNet | JORDER | RFCTNet | GN | JDDN (Ours) | |
|---|---|---|---|---|---|---|---|---|---|
| Rain100H | 21.92/ 0.764 | 28.64/ 0.864 | 22.47/ 0.716 | 26.54/ 0.843 | 29.83/ 0.899 | 26.54/ 0.835 | 29.02/ 0.900 | 29.48/ 0.876 | 29.79/ 0.907 |
| Rain200H | 22.03/ 0.713 | 28.02/ 0.862 | 22.17/ 0.719 | 26.59/ 0.869 | 29.36/ 0.903 | 29.21/ 0.891 | 29.12/ 0.903 | 29.37/ 0.905 | 29.43/ 0.908 |
| Rain12 | 31.78/ 0.900 | - | 34.02/ 0.935 | 32.02/ 0.855 | 34.45/ 0.938 | 33.92/ 0.953 | 35.50/ 0.969 | 34.78/ 0.957 | 35.99/ 0.969 |
| DDN | RESCAN | SIRR | SPANet | PReNet | JORDER | RFCTNet | GN | JDDN (Ours) | |
|---|---|---|---|---|---|---|---|---|---|
| Rain100L | 32.16/ 0.936 | 29.80/ 0.881 | 32.37/ 0.926 | 35.66/ 0.915 | 33.16/ 0.963 | 36.61/ 0.974 | 37.22/ 0.955 | 35.20/ 0.956 | 37.56/ 0.979 |
| Rain200L | 31.66/ 0.922 | 38.43/ 0.982 | 32.20/ 0.929 | 36.13/ 0.975 | 37.93/ 0.983 | 39.13/ 0.985 | 38.99/ 0.983 | 36.12/ 0.979 | 38.08/ 0.983 |
| DDN | SIRR | JDDN (Ours) | |
|---|---|---|---|
| PSNR | 29.91 | 28.44 | 30.98 |
| SSIM | 0.910 | 0.889 | 0.937 |
| DDN | RESCAN | SIRR | SPANet | PReNet | JORDER | JDDN (Ours) | |
|---|---|---|---|---|---|---|---|
| PSNR | 34.80 | 34.73 | 34.84 | 35.26 | 35.00 | 34.13 | 35.31 |
| SSIM | 0.936 | 0.937 | 0.936 | 0.945 | 0.941 | 0.934 | 0.937 |
| RMM | MCB | NLSTM | JDDN | |
| Rain100H | 29.14/0.896 | 29.36/0.900 | 20.89/0.804 | 29.79/0.907 |
| Rain100L | 33.97/0.966 | 34.26/0.968 | 19.84/0.880 | 37.56/0.979 |
| Rain200H | 29.21/0.899 | 28.96/0.900 | 21.21/0.799 | 29.43/0.908 |
| Rain200L | 34.33/0.965 | 33.94/0.967 | 20.54/0.880 | 38.08/0.983 |
| Rain12 | 35.96/0.968 | 35.78/0.967 | 23.61/0.910 | 35.99/0.969 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gu, L.; Xu, H.; Ma, X. A Joint De-Rain and De-Mist Network Based on the Atmospheric Scattering Model. J. Imaging 2023, 9, 129. https://doi.org/10.3390/jimaging9070129
Gu L, Xu H, Ma X. A Joint De-Rain and De-Mist Network Based on the Atmospheric Scattering Model. Journal of Imaging. 2023; 9(7):129. https://doi.org/10.3390/jimaging9070129
Chicago/Turabian StyleGu, Linyun, Huahu Xu, and Xiaojin Ma. 2023. "A Joint De-Rain and De-Mist Network Based on the Atmospheric Scattering Model" Journal of Imaging 9, no. 7: 129. https://doi.org/10.3390/jimaging9070129
APA StyleGu, L., Xu, H., & Ma, X. (2023). A Joint De-Rain and De-Mist Network Based on the Atmospheric Scattering Model. Journal of Imaging, 9(7), 129. https://doi.org/10.3390/jimaging9070129